
Towards 6G IoT: Tracing Mobile Sensor Nodes with Deep Learning Clustering in UAV Networks

 ,
,  ,
,  ,
,  ,
,  , and
, and
Abstract
1. Introduction
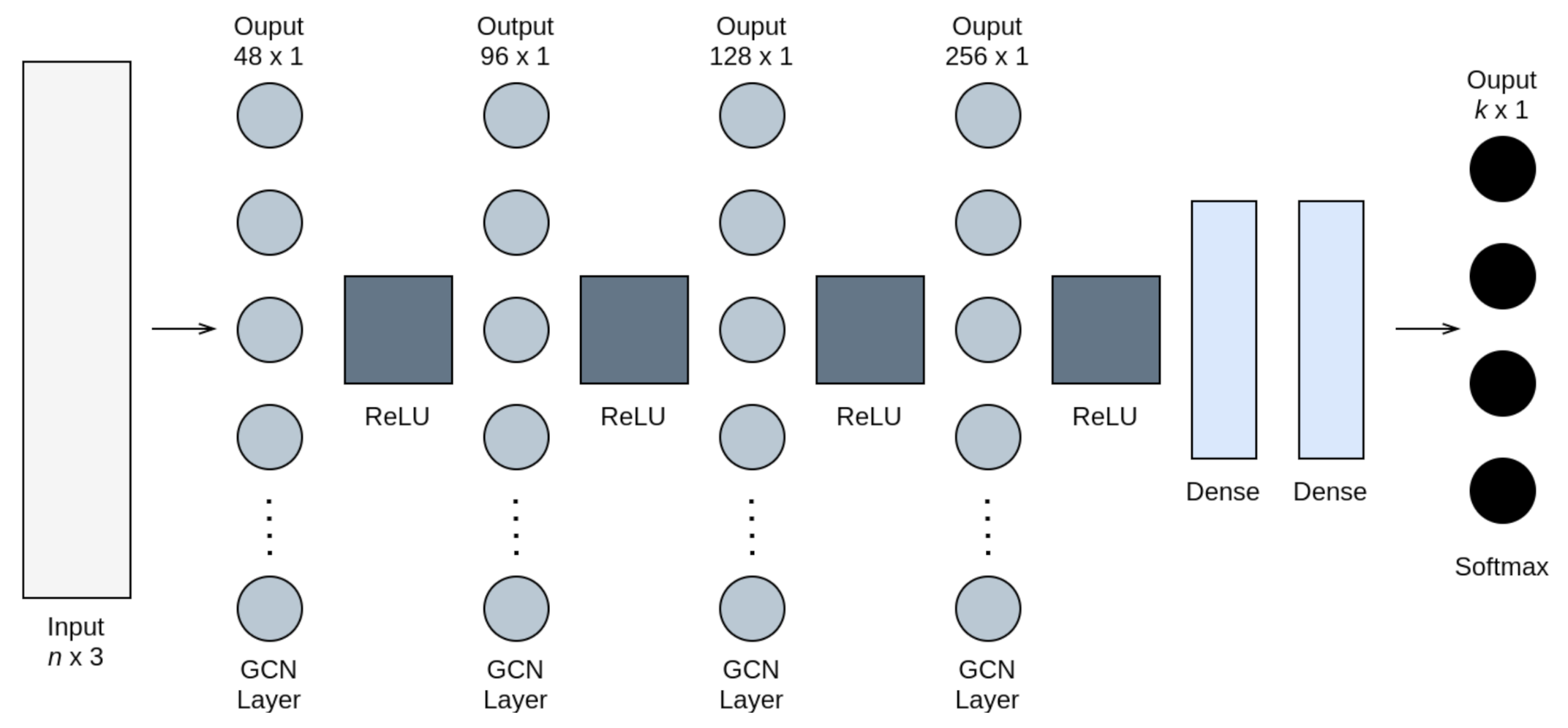
- We introduced a graph representation of the UAV network that enabled the utilisation of graph convolutional network (GCN) architectures;
- The clusterisation was performed in the network at regular intervals based on the RSSI and the current locations of the UAVs, with a dynamic number of clusters at each phase;
- We utilised the optimisation of an RSSI deep learning loss function to determine the final clusters;
- The introduced method allowed the UAVs to trace the target sensor node without explicit knowledge of its location or the use of distance estimates.
2. Related Work
3. Methodology
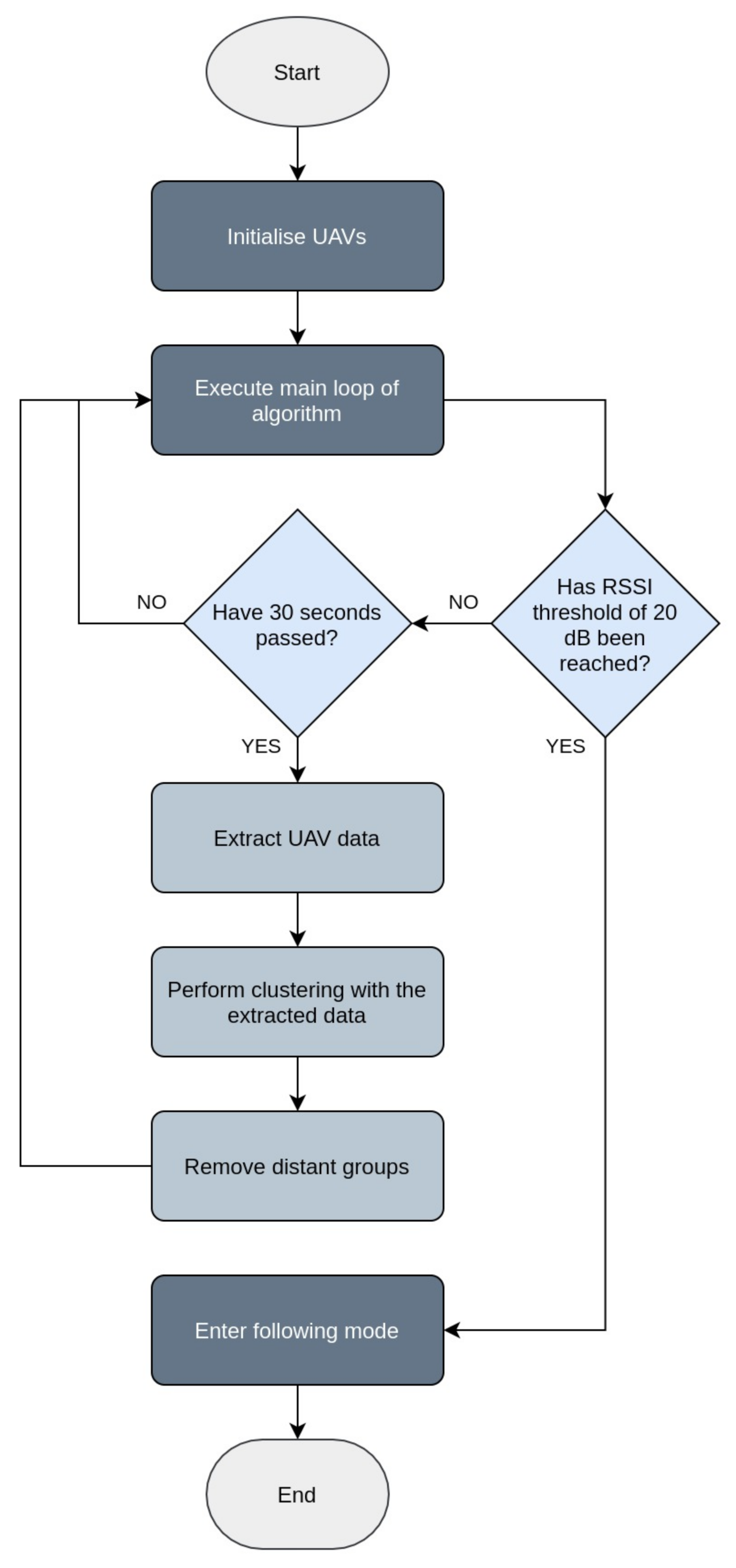
3.1. Tracing Algorithm
3.2. Deep Learning Clustering for the Determination of UAV Groups
3.2.1. Graph Representation of the Network
3.2.2. Deep Learning Loss Formulation
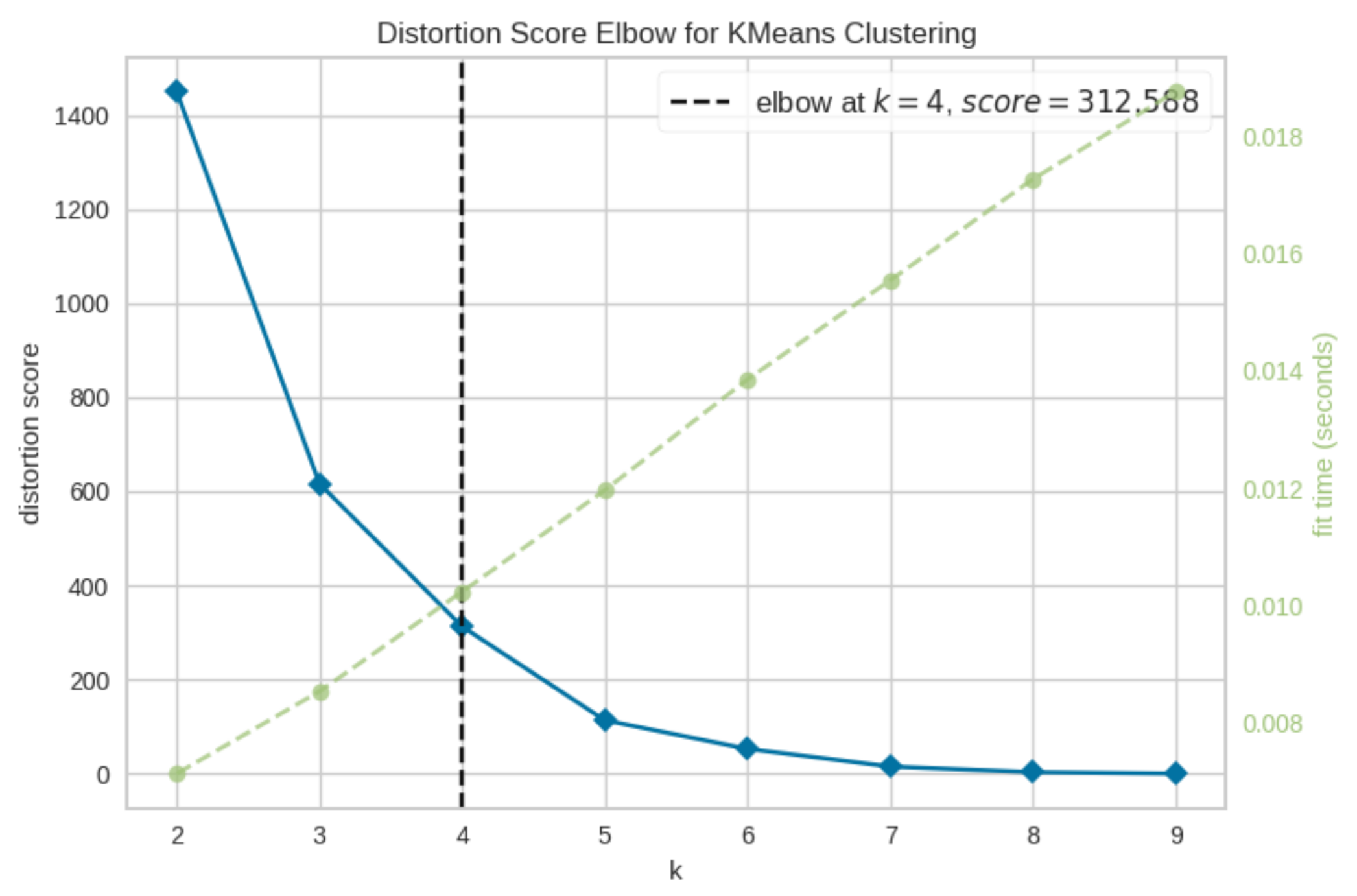
3.2.3. Determining Optimal Number of Clusters
4. Simulation Setup
- In the first scenario, the speed of the UAVs was set to 40 km/h, and the target sensor was placed in a random position, 2 km away from the UAV deployment location;
- In the second scenario, the target was positioned 3 km away from the deployment location, and the UAVs’ velocity was set to 50 km/h.
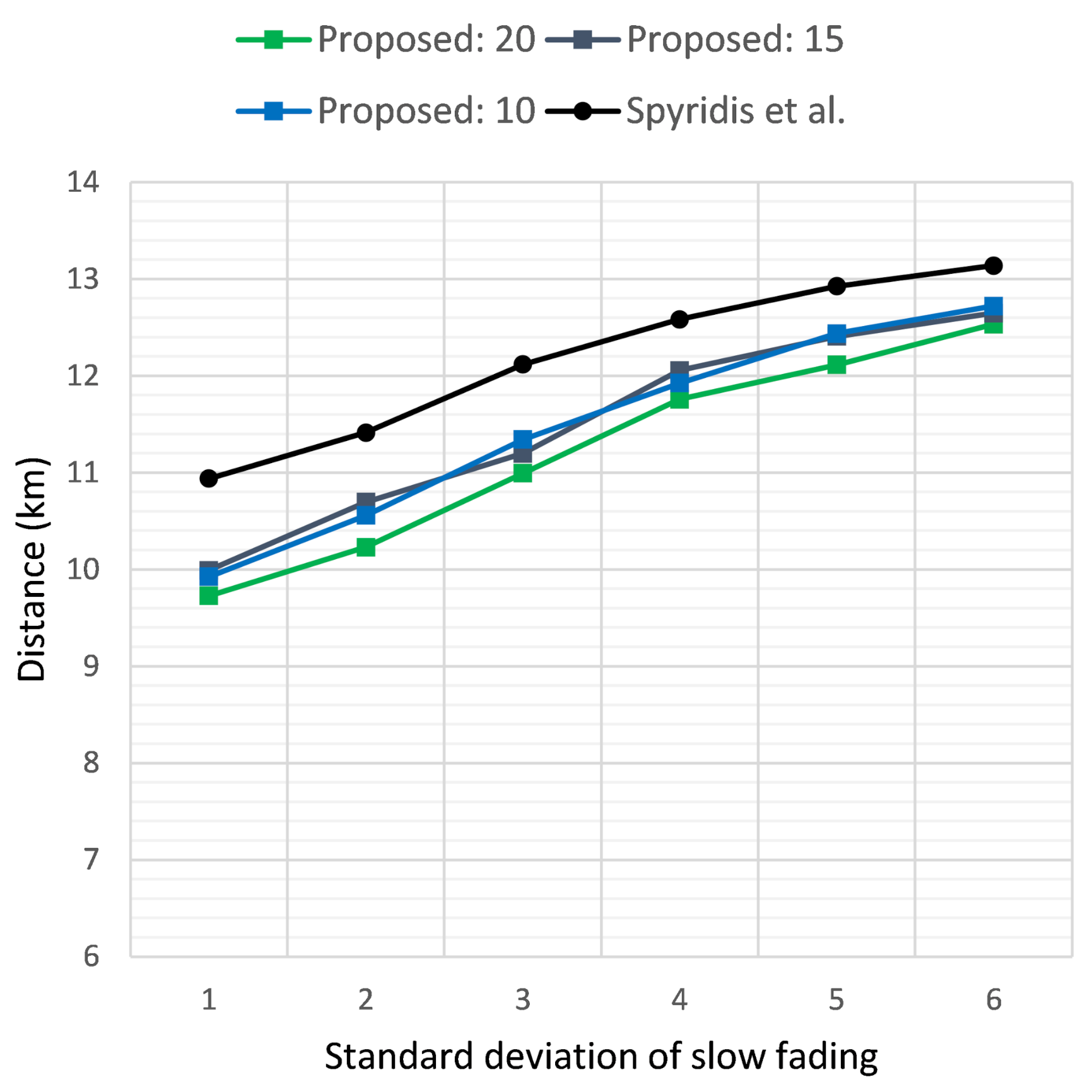
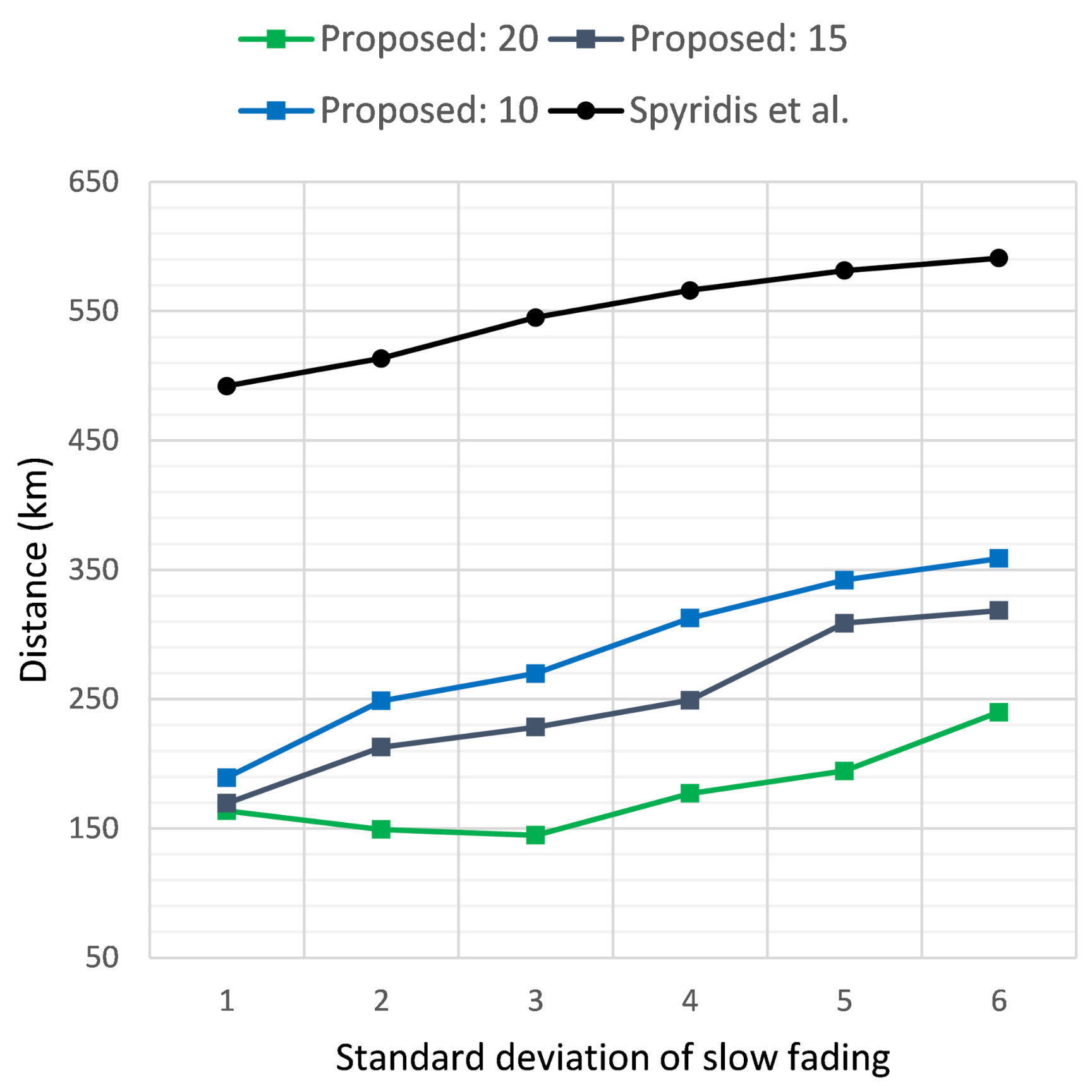
5. Evaluation
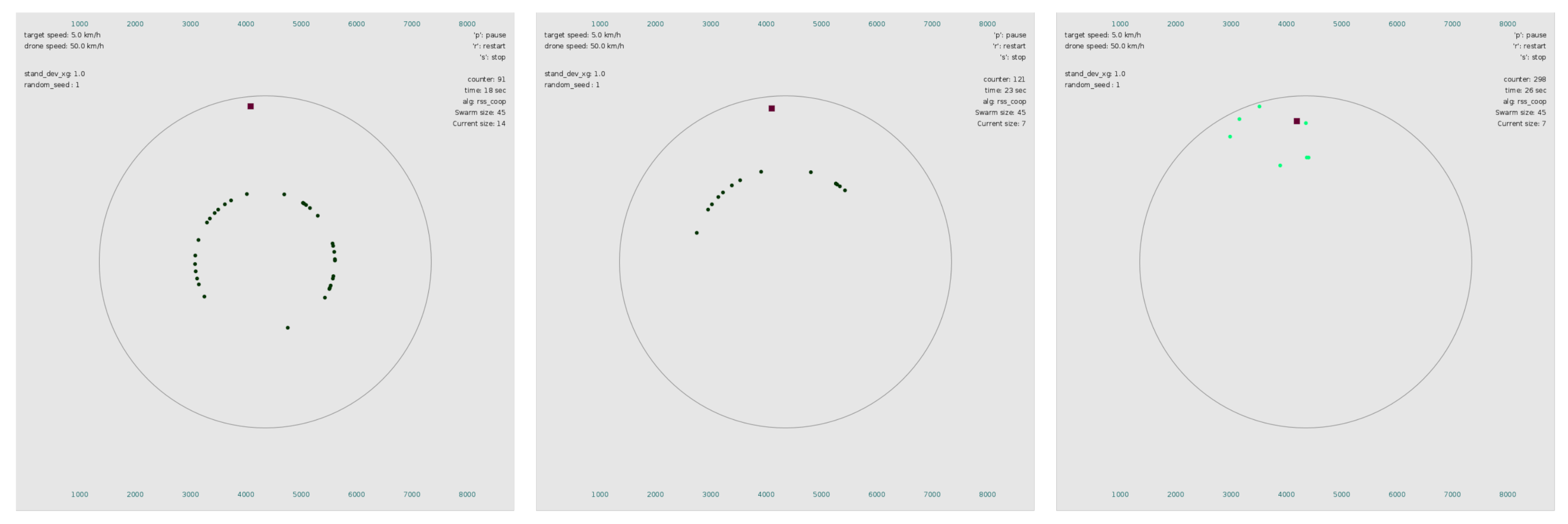
5.1. Results
5.2. Ablation Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sekander, S.; Tabassum, H.; Hossain, E. Multi-Tier Drone Architecture for 5G/B5G Cellular Networks: Challenges, Trends, and Prospects. IEEE Commun. Mag. 2018, 56, 96–103. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone Small Cells in the Clouds: Design, Deployment and Performance Analysis. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT Framework Views and Challenges: Towards Protecting Drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef] [PubMed]
- Zhan, C.; Zeng, Y.; Zhang, R. Energy-Efficient Data Collection in UAV Enabled Wireless Sensor Network. IEEE Wirel. Commun. Lett. 2018, 7, 328–331. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P. Inter-UAV Routing Scheme Testbeds. Drones 2021, 5, 2. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Unmanned Aerial Vehicles (UAVs) for Energy-Efficient Internet of Things Communications. IEEE Trans. Wirel. Commun. 2017, 16, 7574–7589. [Google Scholar] [CrossRef]
- Zong, B.; Fan, C.; Wang, X.; Duan, X.; Wang, B.; Wang, J. 6G Technologies: Key Drivers, Core Requirements, System Architectures, and Enabling Technologies. IEEE Veh. Technol. Mag. 2019, 14, 18–27. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A Vision of 6G Wireless Systems: Applications, Trends, Technologies, and Open Research Problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Xiao, Z.; Zeng, Y. An Overview on Integrated Localization and Communication Towards 6G. arXiv 2020, arXiv:2006.01535. [Google Scholar]
- Aazhang, B.; Ahokangas, P.; Alves, H.; Alouini, M.S.; Beek, J.; Benn, H.; Bennis, M.; Belfiore, J.; Strinati, E.; Chen, F.; et al. Key Drivers and Research Challenges for 6G Ubiquitous Wireless Intelligence; White Paper; 6G Flagship: Oulu, Finland, 2019. [Google Scholar]
- Alsheikh, M.A.; Lin, S.; Niyato, D.; Tan, H. Machine Learning in Wireless Sensor Networks: Algorithms, Strategies, and Applications. IEEE Commun. Surv. Tutor. 2014, 16, 1996–2018. [Google Scholar] [CrossRef]
- Shalev-Shwartz, S.; Ben-David, S. Understanding Machine Learning: From Theory to Algorithms; Cambridge University Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Langley, P.; Simon, H.A. Applications of Machine Learning and Rule Induction. Commun. ACM 1995, 38, 54–64. [Google Scholar] [CrossRef]
- Nikitas, A.; Michalakopoulou, K.; Njoya, E.T.; Karampatzakis, D. Artificial Intelligence, Transport and the Smart City: Definitions and Dimensions of a New Mobility Era. Sustainability 2020, 12, 2789. [Google Scholar] [CrossRef]
- Krishnamachari, L.; Estrin, D.; Wicker, S. The impact of data aggregation in wireless sensor networks. In Proceedings of the 22nd International Conference on Distributed Computing Systems Workshops, Vienna, Austria, 2–5 July 2002; pp. 575–578. [Google Scholar] [CrossRef]
- Spyridis, Y.; Lagkas, T.; Sarigiannidis, P.; Zhang, J. Modelling and simulation of a new cooperative algorithm for UAV swarm coordination in mobile RF target tracking. Simul. Model. Pract. Theory 2021, 107, 102232. [Google Scholar] [CrossRef]
- Gumaida, B.F.; Luo, J. Novel localization algorithm for wireless sensor network based on intelligent water drops. Wirel. Netw. 2019, 25, 597–609. [Google Scholar] [CrossRef]
- Mehdi Dehghan, S.M.; Moradi, H.; Asghar Shahidian, S.A. Optimal path planning for DRSSI based localization of an RF source by multiple UAVs. In Proceedings of the 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; pp. 558–563. [Google Scholar] [CrossRef]
- Sarunic, P.; Evans, R. Hierarchical model predictive control of UAVs performing multitarget-multisensor tracking. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2253–2268. [Google Scholar] [CrossRef]
- Koohifar, F.; Kumbhar, A.; Guvenc, I. Receding Horizon Multi-UAV Cooperative Tracking of Moving RF Source. IEEE Commun. Lett. 2017, 21, 1433–1436. [Google Scholar] [CrossRef]
- Mavrommati, A.; Tzorakoleftherakis, E.; Abraham, I.; Murphey, T. Real-Time Area Coverage and Target Localization Using Receding-Horizon Ergodic Exploration. IEEE Trans. Robot. 2017. [Google Scholar] [CrossRef]
- Koohifar, F.; Guvenc, I.; Sichitiu, M.L. Autonomous Tracking of Intermittent RF Source Using a UAV Swarm. IEEE Access 2018, 6, 15884–15897. [Google Scholar] [CrossRef]
- Pack, D.J.; DeLima, P.; Toussaint, G.J.; York, G. Cooperative Control of UAVs for Localization of Intermittently Emitting Mobile Targets. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 2009, 39, 959–970. [Google Scholar] [CrossRef] [PubMed]
- Faruk Gencel, M.; Madhowl, U.; Pedro Hespanhal, J. RF Source Seeking Using Frequency Measurements. In Proceedings of the 2018 IEEE 19th International Workshop on Signal Processing Advances in Wireless Communications (SPAWC), Kalamata, Greece, 25–28 June 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Acuna, V.; Kumbhar, A.; Vattapparamban, E.; Rajabli, F.; Guvenc, I. Localization of WiFi Devices Using Probe Requests Captured at Unmanned Aerial Vehicles. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Kyösti, P.; Meinilä, J.; Hentilä, L.; Zhao, X.; Jämsä, T.; Schneider, C.; Narandzić, M.; Milojević, M.; Hong, A.; Ylitalo, J.; et al. WINNER II Channel Models Part I Channel Models; 2008. IST-4-027756 WINNER II D1.1.2 v1.2 WINNER II Channel Models. Information Society Technologies 11. Available online: https://www.google.com.hk/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&ved=2ahUKEwj9ltrMpoXxAhVOBKYKHUu8AfIQFjACegQIAhAD&url=http%3A%2F%2Fwww.ero.dk%2F93F2FC5C-0C4B-4E44-8931-00A5B05A331B%3Fframes%3Dno%26&usg=AOvVaw0XgSCl_4J6iDdFg3TdTDxV (accessed on 6 June 2021).
- Nazi, A.; Hang, W.; Goldie, A.; Ravi, S.; Mirhoseini, A. GAP: Generalizable Approximate Graph Partitioning Framework. arXiv 2019, arXiv:1903.00614. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Scenario 1 | Scenario 2 |
|---|---|---|
| Number of UAVs | 45 | 45 |
| Cluster update interval | 30 s | 30 s |
| UAV altitude | 100 m | 100 m |
| UAV velocity | 40 km/h | 50 km/h |
| Target velocity | 5 km/h | 5 km/h |
| Target distance | 2 km | 3 km |
| Target TX power | 10 mW | 10 mW |
| Target TX antenna gain | 2 dBi | 2 dBi |
| UAV RX antenna gain | 2 dBi | 2 dBi |
| Signal frequency | 2400 MHz | 2400 MHz |
| Total duration | 1000 s | 1000 s |
| Threshold | Proposed | Spyridis et al. [17] | ||||
|---|---|---|---|---|---|---|
| Time | Average Distance | Total Distance | Time | Average Distance | Total Distance | |
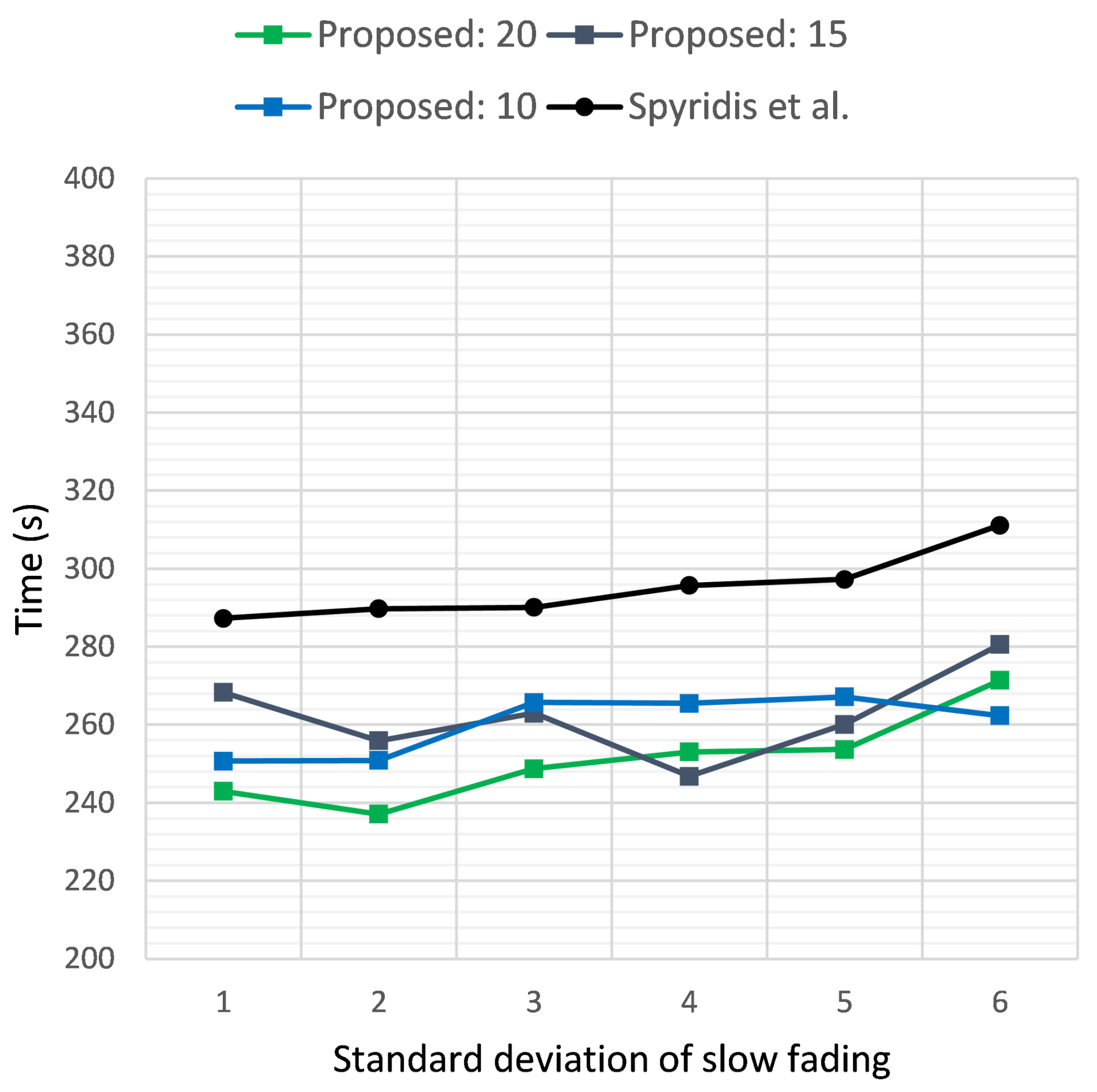
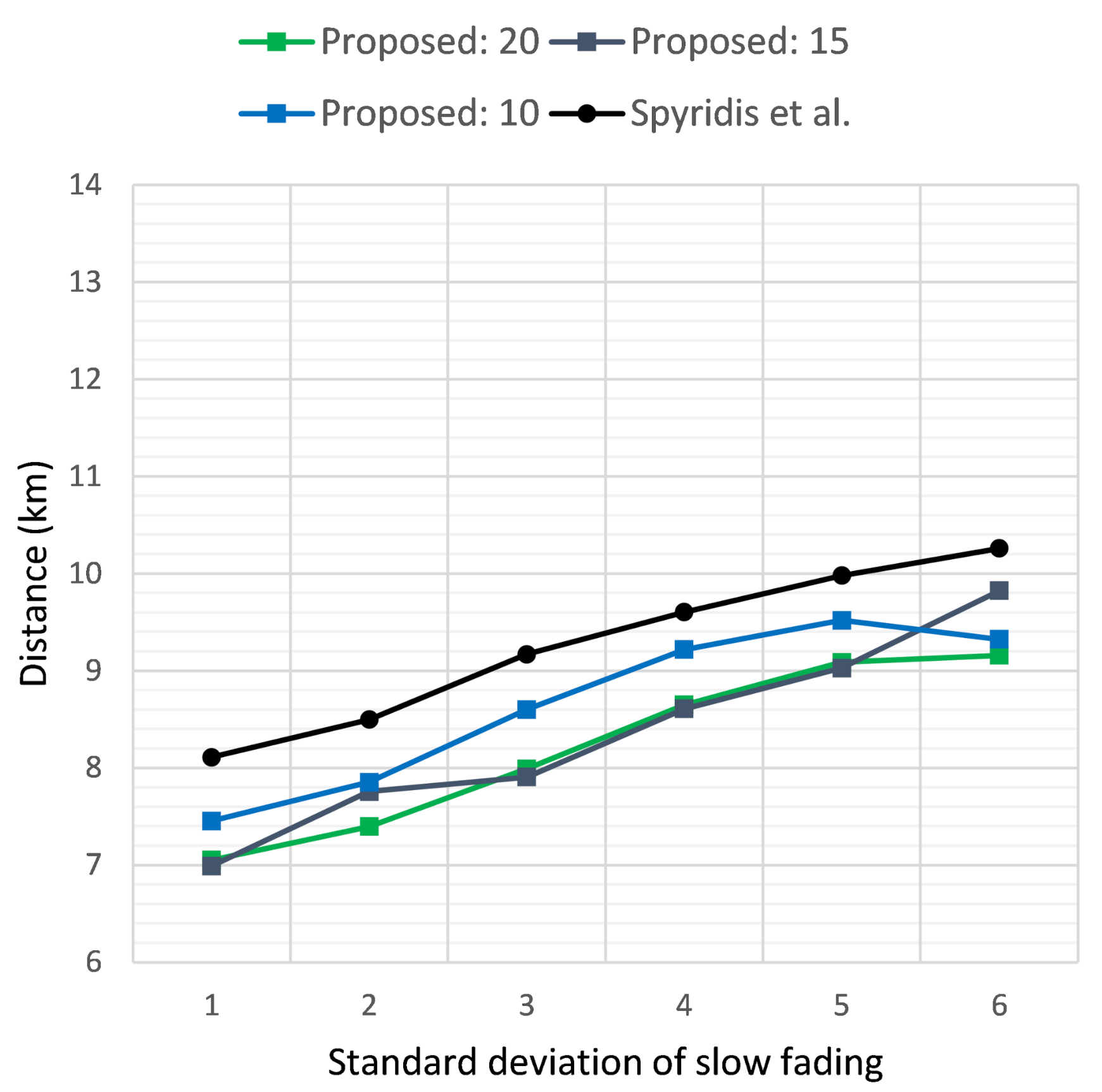
| 10 | 260 | 8661 | 249,032 | 332 | 9201 | 414,214 |
| 15 | 268 | 8351 | 126,716 | 295 | 9270 | 417,322 |
| 20 | 251 | 8222 | 99,191 | 268 | 9345 | 420,705 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spyridis, Y.; Lagkas, T.; Sarigiannidis, P.; Argyriou, V.; Sarigiannidis, A.; Eleftherakis, G.; Zhang, J. Towards 6G IoT: Tracing Mobile Sensor Nodes with Deep Learning Clustering in UAV Networks. Sensors 2021, 21, 3936. https://doi.org/10.3390/s21113936
Spyridis Y, Lagkas T, Sarigiannidis P, Argyriou V, Sarigiannidis A, Eleftherakis G, Zhang J. Towards 6G IoT: Tracing Mobile Sensor Nodes with Deep Learning Clustering in UAV Networks. Sensors. 2021; 21(11):3936. https://doi.org/10.3390/s21113936
Chicago/Turabian StyleSpyridis, Yannis, Thomas Lagkas, Panagiotis Sarigiannidis, Vasileios Argyriou, Antonios Sarigiannidis, George Eleftherakis, and Jie Zhang. 2021. "Towards 6G IoT: Tracing Mobile Sensor Nodes with Deep Learning Clustering in UAV Networks" Sensors 21, no. 11: 3936. https://doi.org/10.3390/s21113936
APA StyleSpyridis, Y., Lagkas, T., Sarigiannidis, P., Argyriou, V., Sarigiannidis, A., Eleftherakis, G., & Zhang, J. (2021). Towards 6G IoT: Tracing Mobile Sensor Nodes with Deep Learning Clustering in UAV Networks. Sensors, 21(11), 3936. https://doi.org/10.3390/s21113936