
Interoperable Nanoparticle Sensor Capable of Strain and Vibration Measurement for Rotor Blade Monitoring



Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
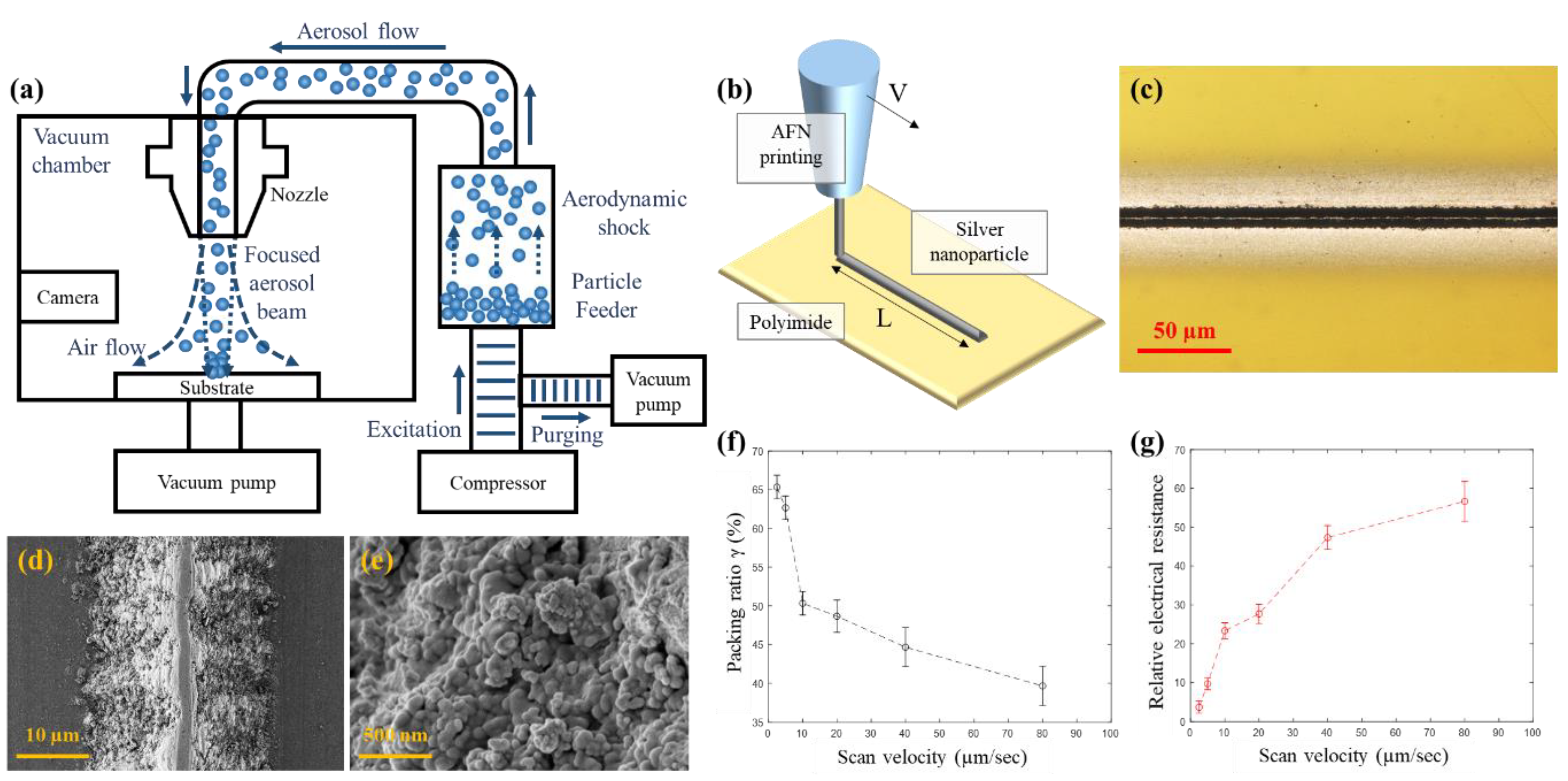
2.2. Sensor Direct Printing
3. Results and Discussion
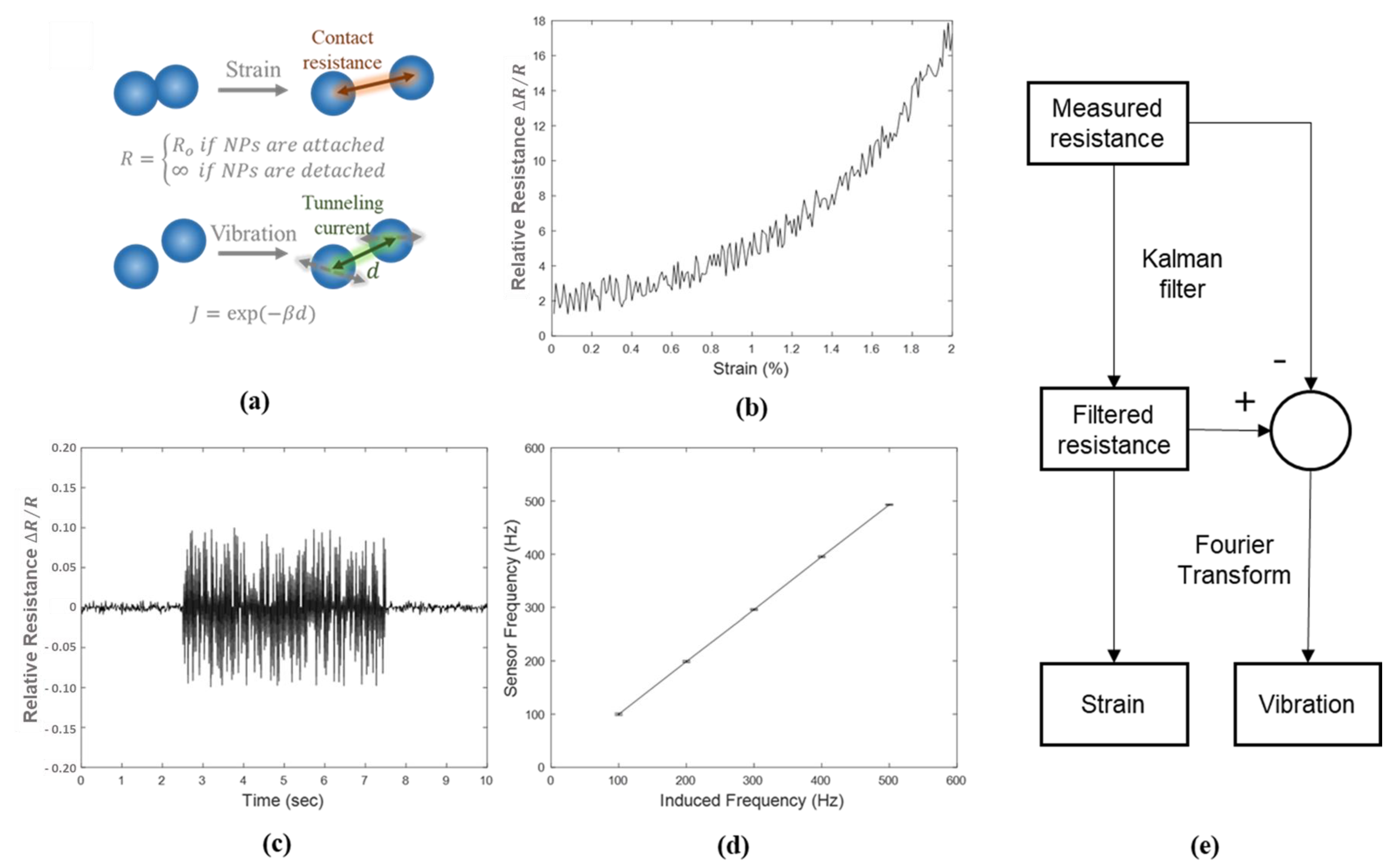
3.1. Sensing Performance Evaluation
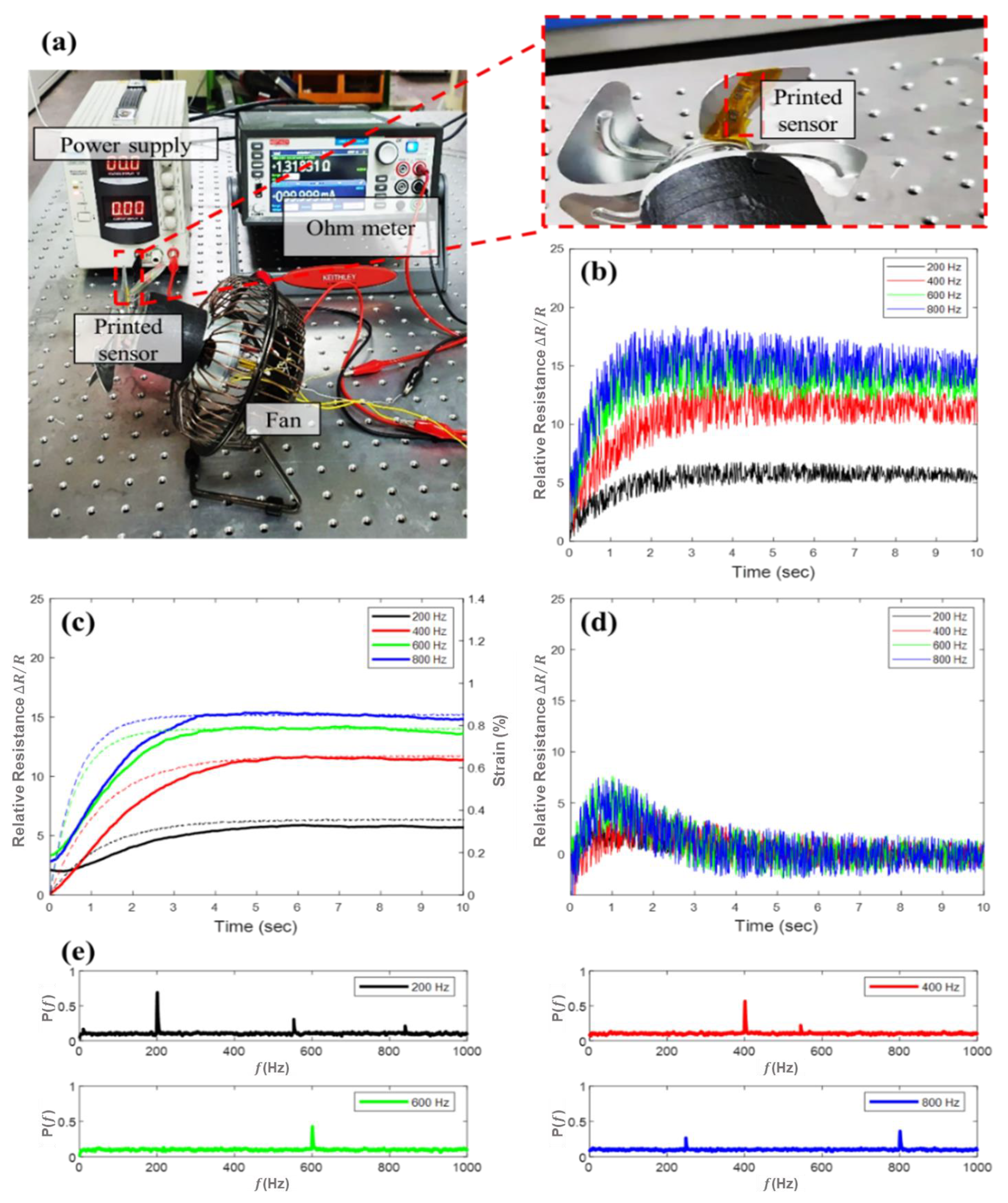
3.2. Interoperable Strain and Vibration Measurement
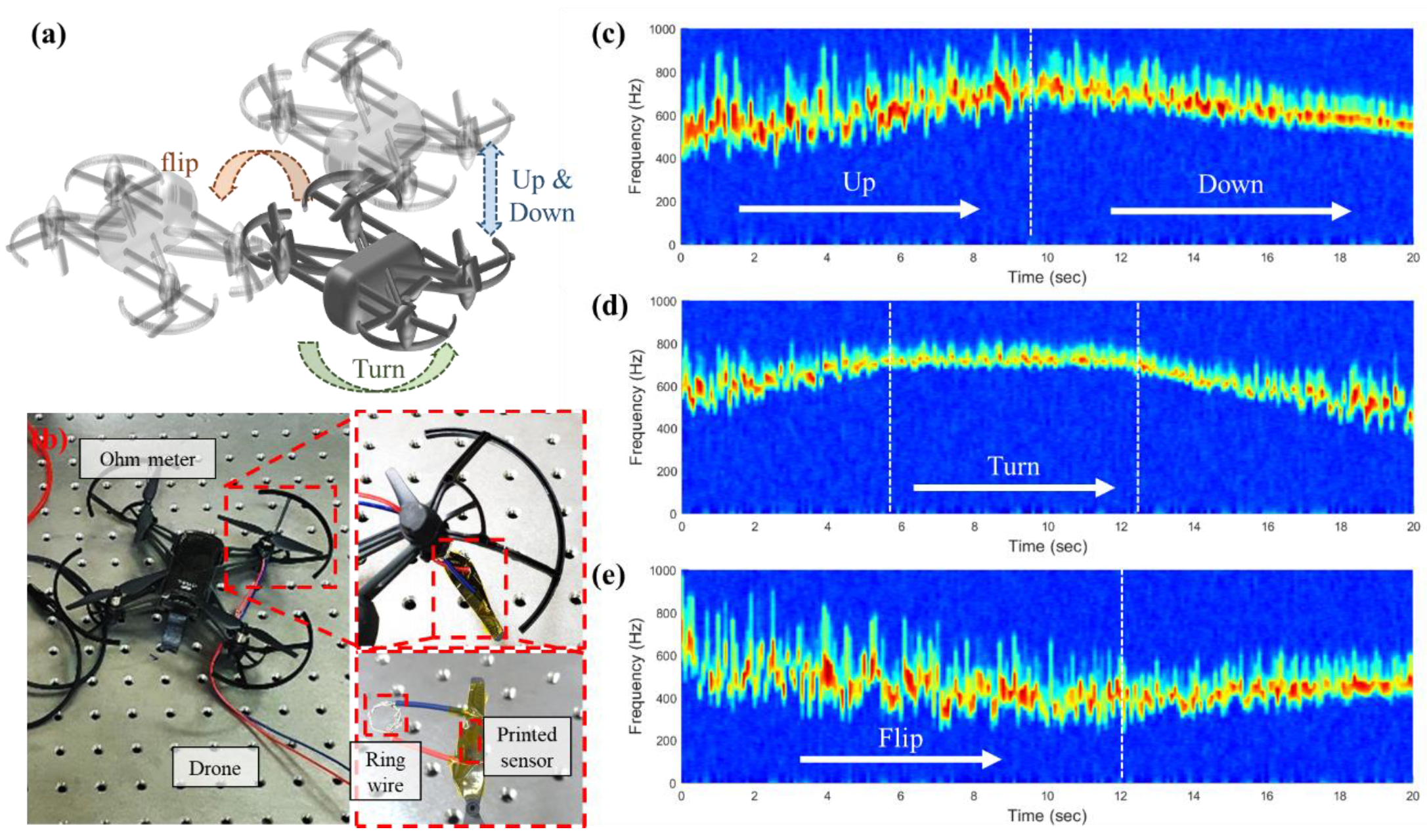
3.3. Quadrotor Monitoring
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tao, F.; Cheng, J.; Qi, Q.; Zhang, M.; Zhang, H.; Sui, F. Digital twin-driven product design, manufacturing and service with big data. Int. J. Adv. Manuf. Technol. 2018, 94, 3563–3576. [Google Scholar] [CrossRef]
- Schleich, B.; Anwer, N.; Mathieu, L.; Wartzack, S. Shaping the digital twin for design and production engineering. CIRP Ann. 2017, 66, 141–144. [Google Scholar] [CrossRef]
- Xiang, T.; Huang, K.; Zhang, H.; Zhang, Y.; Zhang, Y.; Zhou, Y. Detection of Moving Load on Pavement Using Piezoelectric Sensors. Sensors 2020, 20, 2366. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.H.; Lu, N.; Ghaffari, R.; Rogers, J.A. Inorganic semiconductor nanomaterials for flexible and stretchable bio-integrated electronics. NPG Asia Mater. 2012, 4, e15. [Google Scholar] [CrossRef]
- Jeong, C.Y.; Joung, C.W.; Lee, S.H.; Feng, M.; Park, Y.B. Carbon Nanocomposite Based Mechanical Sensing and Energy Harvesting. Int. J. Precis. Eng. Manuf. Green Technol. 2020, 7, 247–267. [Google Scholar] [CrossRef]
- Lalam, N.; Lu, P.; Venketeswaran, A.; Buric, M.P. Pipeline Monitoring Using Highly Sensitive Vibration Sensor Based on Fiber Ring Cavity Laser. Sensors 2021, 21, 2078. [Google Scholar] [CrossRef]
- Liu, Y.; Pharr, M.; Salvatore, G.A. Lab-on-Skin: A Review of Flexible and Stretchable Electronics for Wearable Health Monitoring. ACS Nano 2017, 11, 9614–9635. [Google Scholar] [CrossRef]
- Kim, D.H.; Rogers, J.A. Stretchable Electronics: Materials Strategies and Devices. Adv. Mater. 2008, 20, 4887–4892. [Google Scholar] [CrossRef]
- Qi, K.; He, J.; Wang, H.; Zhou, Y.; You, X.; Nan, N.; Shao, W.; Wang, L.; Ding, B.; Cui, S. A Highly Stretchable Nanofiber-Based Electronic Skin with Pressure-, Strain-, and Flexion-Sensitive Properties for Health and Motion Monitoring. ACS Appl. Mater. Interfaces 2017, 9, 42951–42960. [Google Scholar] [CrossRef]
- Shi, J.-X.; Lei, X.-W.; Natsuki, T. Review on Carbon Nanomaterials-Based Nano-Mass and Nano-Force Sensors by Theoretical Analysis of Vibration Behavior. Sensors 2021, 21, 1907. [Google Scholar] [CrossRef]
- Lee, J.; Kim, S.; Lee, J.; Yang, D.; Park, B.C.; Ryu, S. A stretchable strain sensor based on a metal nanoparticle thin film for human motion detection. Nanoscale 2014, 6, 11932. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Qi, D.; Hu, G.; Wang, H.; Jiang, Y.; Chen, G. Surface Strain Redistribution on Structured Microfibers to Enhance Sensitivity of Fiber-Shaped Stretchable Strain Sensors. Adv. Mater. 2018, 30, 1704229. [Google Scholar] [CrossRef]
- Pang, C.; Lee, G.Y.; Kim, T.I.; Kim, S.M.; Kim, H.N.; Ahn, S.H. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofiber. Nat. Mater. 2012, 11, 795–801. [Google Scholar] [CrossRef] [PubMed]
- Gong, S.; Lai, D.; Wang, Y.; Yap, L.W.; Si, K.J.; Shi, Q. Tattoolike Polyaniline Microparticle-Doped Gold Nanowire Patches as Highly Durable Wearable Sensors. ACS Appl. Mater. Interfaces 2015, 7, 19700–19708. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Puyoo, E.; Malhaire, C.; Thomas, D.; Rafaël, R.; R’Mili, M.; Malchère, A.; Roiban, L.; Koneti, S.; Bugnet, M.; Sabac, A.; et al. Metallic nanoparticle-based strain sensors elaborated by atomic layer deposition. Appl. Phys. Lett. 2017, 110, 123103. [Google Scholar] [CrossRef]
- Lee, S.; Koo, J.; Kang, S.K.; Park, G.; Lee, Y.J.; Chen, Y.Y. Metal microparticle—Polymer composites as printable, bio/ecoresorbable conductive inks. Mater. Today 2018, 21, 207–215. [Google Scholar] [CrossRef]
- Herrmann, J.; Müller, K.H.; Reda, T.; Baxter, G.R.; Raguse, B.; de Groot, G.J.J.B.; Chai, R.; Roberts, M.; Wieczorek, L. Nanoparticle films as sensitive strain gauges. Appl. Phys. Lett. 2007, 91, 183105. [Google Scholar] [CrossRef]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 6, 2345–2352. [Google Scholar] [CrossRef]
- Shin, U.H.; Jeong, D.W.; Park, S.M.; Kim, S.H.; Lee, H.W.; Kim, J.M. Highly stretchable conductors and piezocapacitive strain gauges basedon simple contact-transfer patterning of carbon nanotube forests. Carbon 2014, 80, 396–404. [Google Scholar] [CrossRef]
- Liao, X.; Liao, Q.; Zhang, Z.; Yan, X.; Liang, Q.; Wang, Q. A Highly stretchable ZnO@ Fiber-Based Multifunctional Nanosensor for Strain/Temperature/UV Detection. Adv. Funct. Mater. 2016, 26, 3074–3081. [Google Scholar] [CrossRef]
- Ra, Y.S.; La, M.W.; Cho, S.M.; Park, S.J.; Choi, D.W. Scalable Batch Fabrication of Flexible, Transparent and Self-triggered Tactile Sensor Array Based on Triboelectric Effect. Int. J. Precis. Eng. Manuf. Green Technol. 2021, 8, 519–531. [Google Scholar] [CrossRef]
- Piliposian, G.; Hasanya, A.; Piliposyan, G.; Jilavyan, H. On the Sensing, Actuating and Energy Harvesting Properties of a Composite Plate with Piezoelectric Patches. Int. J. Precis. Eng. Manuf. Green Technol. 2020, 7, 657–668. [Google Scholar] [CrossRef]
- Boland, C.S.; Khan, U.; Backes, C.; Neill, O.; Mccauley, A.; Duane, J.S. High-Strain, High- Rate Bodily Motion Sensors Based on Graphene-Rubber Composites. ACS Nano 2014, 8, 8819–8830. [Google Scholar] [CrossRef]
- Kim, Y.G.; Quan, Y.J.; Kim, M.S.; Cho, Y.G.; Ahn, S.H. Lithography-free and Highly Angle Sensitive Structural Coloration Using Fabry–Perot Resonance of Tin. Int. J. Precis. Eng. Manuf. Green Technol. 2021, 8, 997–1006. [Google Scholar] [CrossRef]
- Fan, W.; Bu, W.; Shi, J. On The Latest Three-Stage Development of Nanomedicines based on Upconversion Nanoparticles. Adv. Mater. 2016, 28, 3987–4011. [Google Scholar] [CrossRef]
- Jo, M.H.; Lee, J.S.; Kim, S.Y.; Cho, G.J.; Lee, T.M.; Lee, C.W. Resistance Control of an Additively Manufactured Conductive Layer in Roll-to-Roll Gravure Printing Systems. Int. J. Precis. Eng. Manuf. Green Technol. 2021, 8, 817–828. [Google Scholar] [CrossRef]
- Lee, G.Y.; Park, J.I.; Kim, C.S.; Yoon, H.S.; Yang, J.; Ahn, S.H. Aerodynamically focused nanoparticle (AFN) printing: Novel direct printing technique of solvent-free and inorganic nanoparticles. ACS Appl. Mater. Interfaces 2014, 6, 16466–16471. [Google Scholar] [CrossRef]
- Lee, G.Y.; Kim, M.S.; Min, S.H.; Kim, H.S.; Kim, H.J.; Keller, R.; Ihn, J.B.; Ahn, S.H. Highly Sensitive Solvent-free Silver Nanoparticle Strain Sensors with Tunable Sensitivity Created Using an Aerodynamically Focused Nanoparticle Printer. ACS Appl. Mater. Interfaces 2019, 11, 26421–26432. [Google Scholar] [CrossRef]
- Min, S.H.; Lee, G.Y.; Ahn, S.H. Direct printing of highly sensitive, stretchable, and durable strain sensor based on silver nanoparticles/multi-walled carbon nanotubes composites. Compos. Part B Eng. 2019, 161, 395–401. [Google Scholar] [CrossRef]
- Feir-Walsh, B.J.; Toothaker, L.E. An Empirical Comparison of the Anova F-Test, Normal Scores Test and Kruskal-Wallis Test Under Violation of Assumptions. Educ. Psychol. Meas. 1974, 34, 789–799. [Google Scholar] [CrossRef]
- Westfall, P.H.; Young, S.S. On Adjusting P-Values for Multiplicity. Biometrics 1993, 49, 941–945. [Google Scholar] [CrossRef]
- Wan, E.A.; Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158. [Google Scholar]
- Hoshiya, M.; Saito, E. Structural Identification by Extended Kalman Filter. J. Eng. Mech. 1757, 110, 12. [Google Scholar] [CrossRef]
- Liu, W.Q.; Badel, A.; Formosa, F.; Wu, Y.P.; Agbossou, A. Novel piezoelectric bistable oscillator architecture for wideband vibration energy harvesting. Smart Mater. Struct. 2013, 22, 035013. [Google Scholar] [CrossRef]
- Roy, B.K.; Chakraborty, S.; Mihsra, S.K. Robust optimum design of base insolation system in seismic vibration control of structures under uncertain bounded system parameters. J. Vib. Control 2014, 20, 786–800. [Google Scholar] [CrossRef]
- Speller, K.E.; Yu, D. Unattended/Unmanned Ground, Ocean, and Air Sensor Technologies and Applications VI. Proc. Spie 2004, 5417, 63–72. [Google Scholar]
- Chiu, Y.; Tseng, V.F.G. A capacitive vibration-to-electricity energy converter with integrated mechanical switches. J. Micromech. Microeng. 2008, 18, 104004. [Google Scholar] [CrossRef]
- Gerfers, F.; den Besten, G.W.; Petkov, P.V.; Conder, J.E.; Koellmann, A.J. A 0.2–2 Gb/s 6x OSR Receiver Using a Digitally Self-Adaptive Equalizer. IEEE J. Solid-State Circuits 2008, 43, 1436–1448. [Google Scholar] [CrossRef]
- Yaghootkar, B.; Azimi, S.; Bahreyni, B. A High-Performance Piezoelectric Vibration Sensor. IEEE Sens. J. 2017, 17, 4005–4012. [Google Scholar] [CrossRef]
- Sangeetha, N.M.; Decorde, N.; Viallet, B.; Viau, G.; Ressier, L. Nanoparticle-Based Strain Gauges Fabricated by Convective Self Assembly: Strain Sensitivity and Hysteresis with Respect to Nanoparticle Sizes. J. Phys. Chem. C 2013, 117, 1935–1940. [Google Scholar] [CrossRef]
- Yi, L.; Jiao, W.; Wu, K.; Qian, L.; Yu, X.; Xia, Q. Nanoparticle monolayer-based flexible strain gauge with ultrafast dynamic response for acoustic vibration detection. Nano Res. 2015, 8, 2978–2987. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vibration Source (Hz) | Results of p-Value |
|---|---|
| 200 | 0.032 |
| 400 | 0.018 |
| 600 | 0.011 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Min, S.-H.; Quan, Y.-J.; Park, S.-Y.; Lee, G.-Y.; Ahn, S.-H. Interoperable Nanoparticle Sensor Capable of Strain and Vibration Measurement for Rotor Blade Monitoring. Sensors 2021, 21, 3648. https://doi.org/10.3390/s21113648
Min S-H, Quan Y-J, Park S-Y, Lee G-Y, Ahn S-H. Interoperable Nanoparticle Sensor Capable of Strain and Vibration Measurement for Rotor Blade Monitoring. Sensors. 2021; 21(11):3648. https://doi.org/10.3390/s21113648
Chicago/Turabian StyleMin, Soo-Hong, Ying-Jun Quan, Su-Young Park, Gil-Yong Lee, and Sung-Hoon Ahn. 2021. "Interoperable Nanoparticle Sensor Capable of Strain and Vibration Measurement for Rotor Blade Monitoring" Sensors 21, no. 11: 3648. https://doi.org/10.3390/s21113648
APA StyleMin, S.-H., Quan, Y.-J., Park, S.-Y., Lee, G.-Y., & Ahn, S.-H. (2021). Interoperable Nanoparticle Sensor Capable of Strain and Vibration Measurement for Rotor Blade Monitoring. Sensors, 21(11), 3648. https://doi.org/10.3390/s21113648