1. Introduction
Optical fiber sensors provide several advantages for detecting temperature or strain in polymer matrix composites [
1,
2,
3]. They are relatively noninvasive and lightweight. Though an optical fiber is fragile, it is sufficiently flexible to embed in composite structures, and optical fiber sensors respond to changes in strain or temperature quickly and with high sensitivity [
4], even at very high temperatures (approaching 1000 °C) [
5,
6,
7].
Distributed optical fiber sensors (DOFS), specifically DOFS based on Rayleigh scattering, can detect temperature or strain with high spatial resolution [
8]. This makes them attractive for use in applications requiring the detection of a localized perturbation (in temperature or strain), such as fire or impact damage in composites. Examples include detection of fire, high energy radiation, and the resulting damage on aerospace or mechanical structures [
9,
10], in which localized, high temperature gradients must be rapidly detected to protect the structure [
11]. However, the detection time required to rapidly measure temperature variations when using a fiber optic sensor can be limited by either the thermal response time of the host material or strains that may be present in the structure at any given instant and that can mask the thermal response. Various fiber sensors that can be used in composites to perform structural health monitoring, along with their comparative advantages and disadvantages, are provided in [
11].
Past research has shown that embedded fiber Bragg gratings (FBGs) can be used to accurately measure the temperature and location of high energy laser (HEL) strikes on composites [
12]. However, as point sensors, numerous FBGs must be dispersed throughout the composite to accurately identify the location of a strike. In contrast, DOFS are distributed sensors with numerous sampling points along the entire length of the fiber that can be spatially resolved using swept wavelength interferometry, with greater likelihood of detecting and locating a strike. The focus of this effort was to use localized heating in the presence of applied mechanical strain to test a concept for strain cancellation in a properly configured DOFS network [
13] that would mitigate the effect of bending strain on the rapid detection of a HEL strike.
In previous research [
14], DOFS in bare fiber were calibrated to higher temperatures than had been previously published. Specifically, a single 1-m long DOFS was embedded within a polymer matrix composite and subsequently assaulted with a high energy laser (HEL). Temperatures over 900 °C resulted during the laser strike, and the speed of the sensor response was determined. In general, the laser strike was detected in less than 1 sec, with the fastest detection time as low as 42 ms, dependent on the position of the strike relative to the sensor. In the additional testing described in this paper, a carbon fiber reinforced polymer (CFRP) specimen is tested with applied cyclic bending strain. Since strain in the specimen can obscure the response due to temperature, resulting in slower detection, a signal processing technique is described that cancels the bending strain measured in the specimen, while also amplifying the thermal response. Since the goal is rapid detection of a temperature spike during an HEL strike—and well before temperatures become excessive—the technique is first tested using low energy radiation from an optical fiber pigtailed laser diode, to emulate the early stage of a HEL strike.
This paper first briefly describes the operation of a distributed optical fiber sensor based on Rayleigh scattering. The procedures used to embed the DOFS and the sensor network configuration in the composite are then explained. The test configuration for a composite beam under cyclic loading with and without low energy laser radiation is described. Predictions are made if mechanical strain or heat is applied. Results are presented first with only strain applied to the composite to achieve a baseline test of strain cancellation, then using only a laser diode to generate localized heating to various temperature levels. Finally, test results are described when both strain and heating are present in the composite specimen, to demonstrate how the temperature response can be enhanced as the strain response is canceled.
2. Theory and Background
Distributed sensing based on Rayleigh backscattering can be achieved using standard optical fiber made of silica. Small variations in the density of the glass occur during the initial draw of the fiber, so that each fiber is uniquely characterized by an index of refraction that varies randomly along the length of the optical fiber [
15,
16]. The index of refraction is sensitive to strain or temperature fluctuations, due to the photoelastic and thermooptic effects in silica, respectively [
11,
12,
13]. Optical frequency domain reflectometry (OFDR) can be used to detect changes in the index of refraction, so that each optical fiber can be used as a distributed sensor to measure changes in temperature or strain that temporarily (or permanently) alter the back reflected signal from its initial (i.e., reference) state. An interrogator system reads the backscattered amplitudes gathered during the tests, and after appropriate signal processing, the cross correlation of the received signals with the reference state of the sensor yields a frequency shift that (when properly calibrated) corresponds to changes in strain or temperature. For the Luna Innovations HD-FOS sensors used here, the temperature and strain were measured with a spatial resolution of ~1 mm along the full length of a ~1 m long sensor.
At low temperatures, such as those used in these tests, the relationship between the frequency shift measured by the Luna Innovations Optical Distributed Sensor Interrogator (ODiSI-B) and the temperature is linear. Equation (1), provided by Luna for this particular sensor, is valid for temperatures below approximately 250 °C, where the proportionality coefficient relating the temperature shift to frequency has units of °C/GHz:
For larger temperature shifts, such as those that occur during a HEL strike, the sensitivity relationship is nonlinear, described using a higher degree polynomial [
14]. The relationship between the frequency shift and strain can also be defined using a sensitivity polynomial. For the Luna Innovations ODiSI-B interrogator and the sensor used in these tests, the Luna-provided relationship is
where the coefficients
a and
b relating the strain ε to the frequency shift
f are given in με/GHz
2 and με/GHz, respectively.
Additional specifications provided by the manufacturer for the sensors used in these experiments include: gage length, 1.3 mm; gage pitch, 0.65 mm; strain measurement range and resolution, 10000 ± 1 με; maximum temperature range and resolution, 220 ± 0.1 °C; data acquisition rate, 23.8 Hz. For the strain specifications in these sensors, the second order term in (2) has a minimal effect and the frequency relationship to strain is approximately linear.
3. Specimen Preparation and Predicted Strain Response
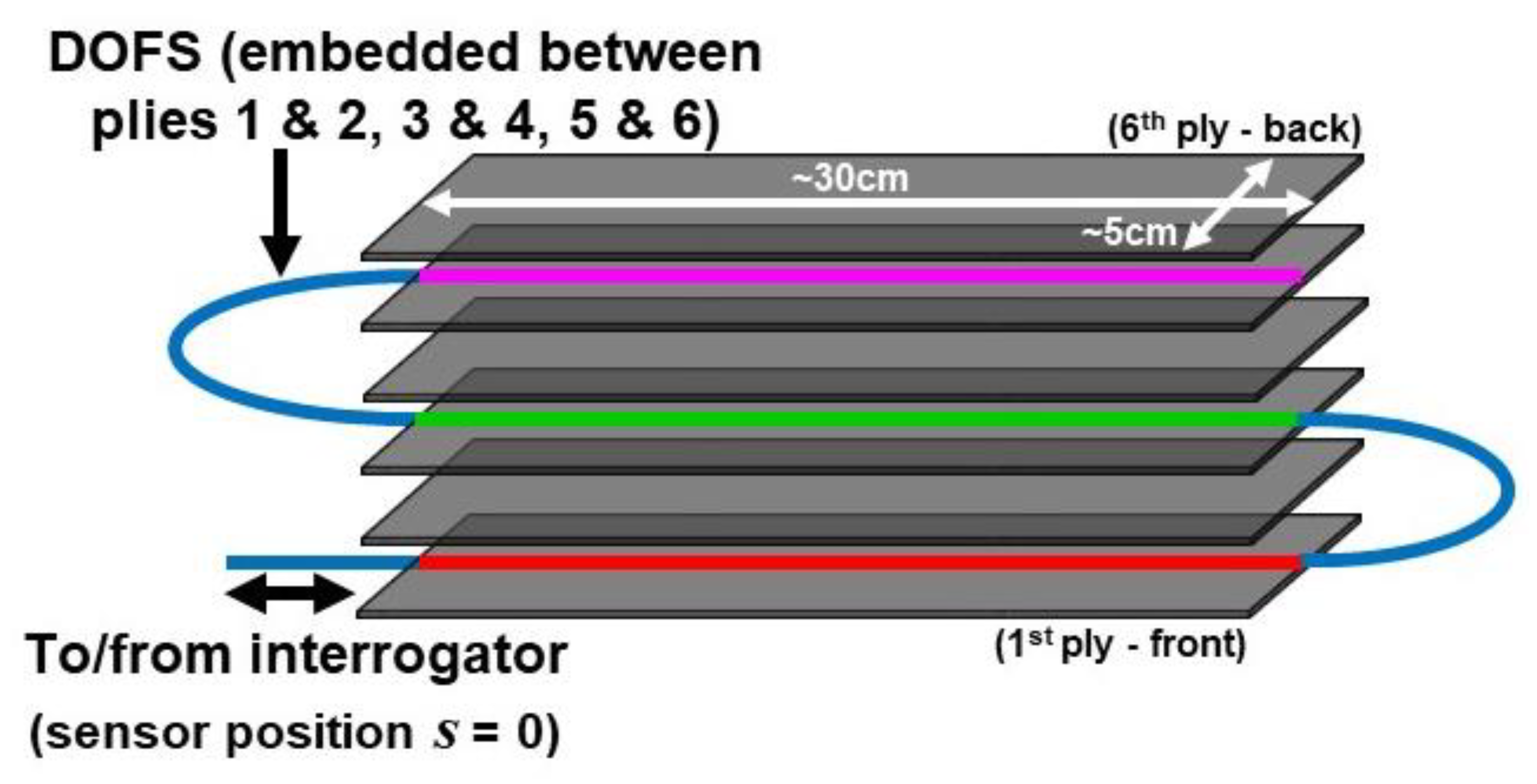
For the current tests, in order to embed the DOFS into CFRP, a 30 cm × 28 cm swatch of plain weave carbon fiber fabric was first wetted out with a slow curing epoxy resin on a smooth granite surface. To fabricate a 6-ply CFRP specimen, the excess resin was scraped off of the fabric and the saturated carbon fabric was cut into six 5 cm × 28 cm rectangles. Then, one of the six plies was laid on a clean area of the granite table. The DOFS was placed along the centerline of the ply lengthwise and taped down on both sides, so that the optical fiber was straight and taut. Two additional plies of the prepared CFRP specimen were then placed on top of the first ply, and a second segment of the DOFS was looped back and taped in place the same way as before—that is, lined up with the optical fiber beneath it. Two additional plies of the carbon fiber specimen were subsequently placed on top and a third segment of the DOFS was taped in place the same way. Finally, the last ply was positioned on top of the composite specimen, and a thin strand of Kevlar was set along the top of the composite, directly above where the DOFS was embedded in order to mark the location of the DOFS inside the composite. Note, when embedding the DOFS, a loop of exposed optical fiber was present on each end where the sensor exited and then entered back into the composite. Since the optical fiber is delicate, care was taken to create a loop of exposed fiber that was sufficient to ensure that it was no smaller than the minimum bend radius (of ~1 cm) of the fiber to prevent breakage.
The composite was then vacuum bagged at approximately one atmosphere of pressure. A single layer of breather cloth was used in the layup together with a layer of peel ply, to allow the vacuum bag to breathe and to soak up excess resin. A vacuum bag quick disconnect connector was placed on top of the breather cloth, where the vacuum hose then exited the vacuum bag. The composite was then sealed in the vacuum bag and left to cure at room temperature for 24 h. After 24 h, the vacuum pump was turned off and the vacuum bag was removed. The breather cloth was removed, exposing the composite. Using a razor blade, the 6-ply composite with the embedded DOFS was carefully removed from the granite table.
Figure 1 shows a schematic of the DOFS network in the six-ply CFRP beam and
Figure 2 shows a photograph of the beam. As just described, the ~1-m long DOFS was embedded between the top two plies, the middle two plies, and the bottom two plies of the CFRP specimen. These segments are highlighted in color for future reference.
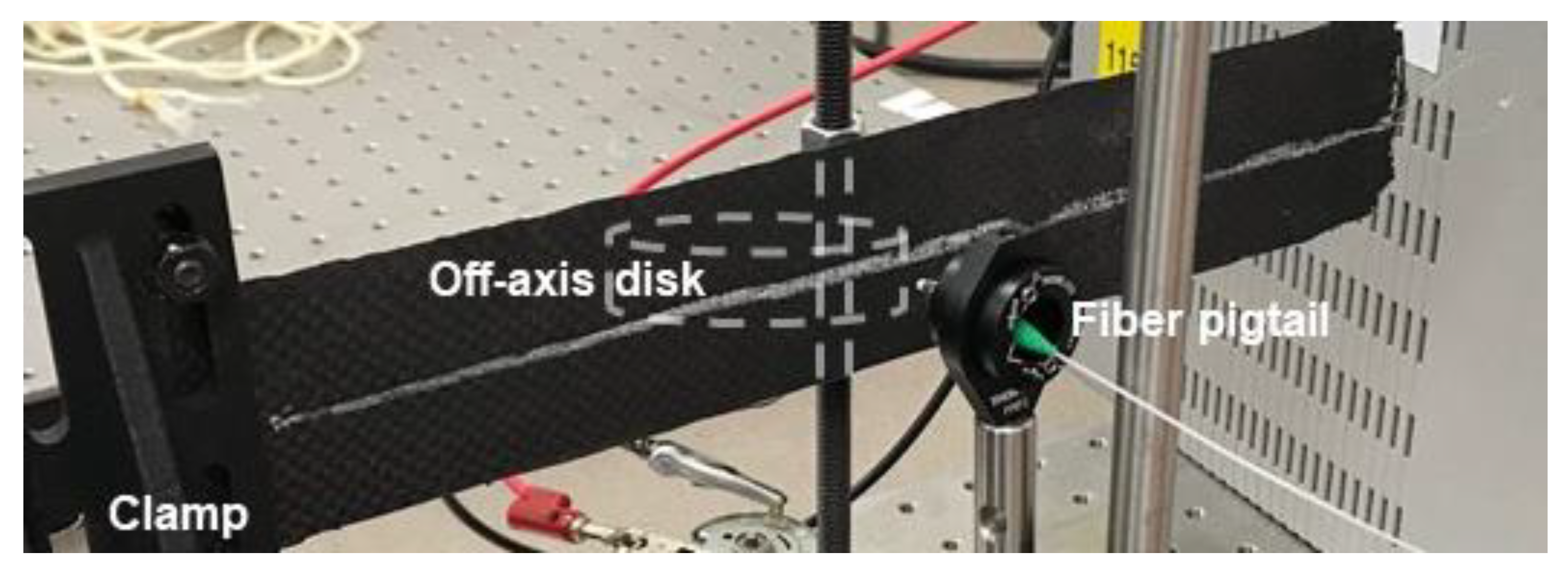
To apply bending strain, the specimen was clamped on one end, as illustrated in
Figure 2, and an off-axis disc was placed against the back of the specimen and driven by a DC motor. The disc rotation and distance
L from the clamp could be adjusted to vary the magnitude of the flexural strain. After measuring the strain response, additional tests were performed with a 975-nm optical fiber-coupled laser diode to irradiate (and heat) various locations on the specimen.
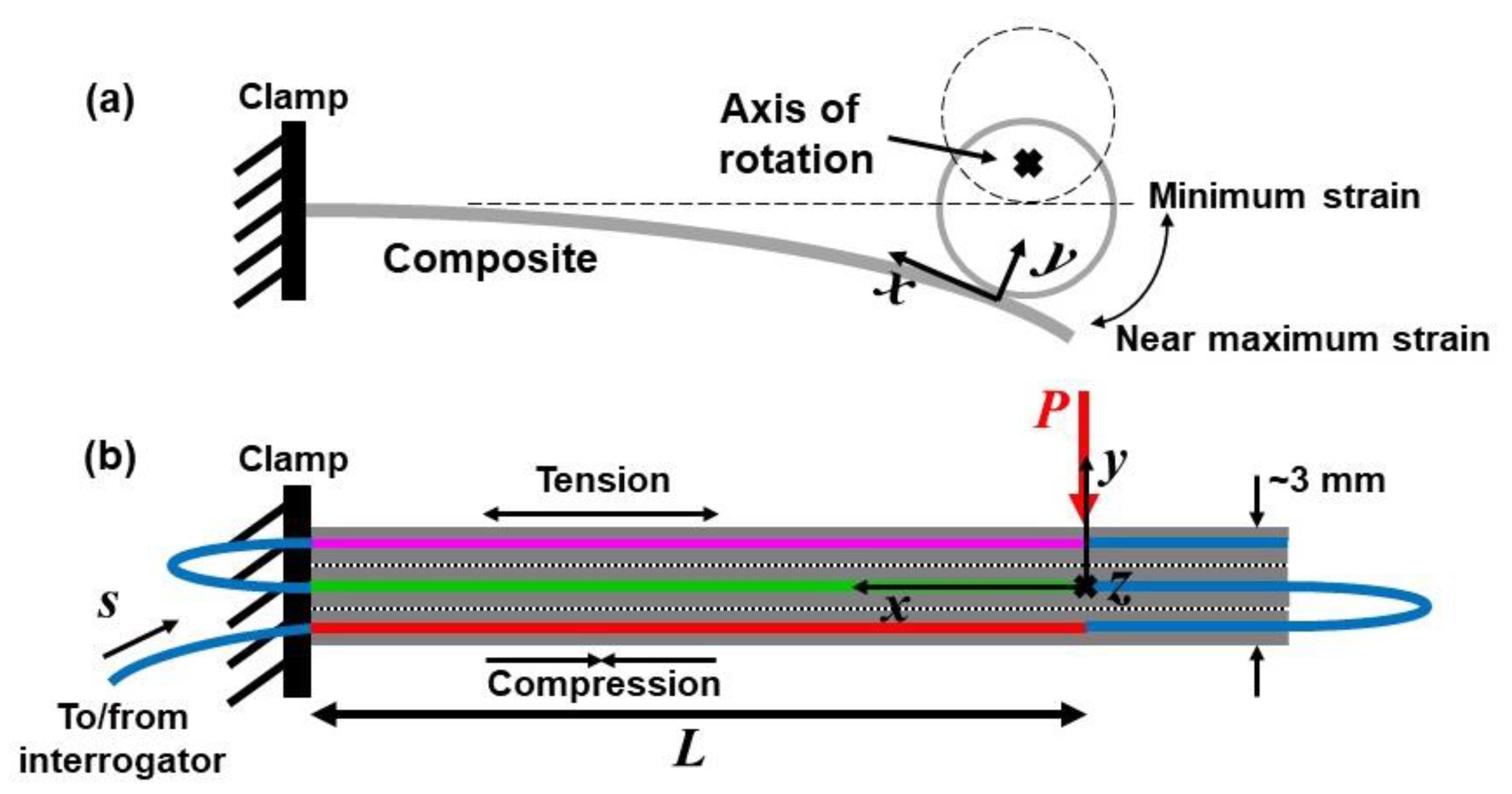
A schematic and a beam diagram for the full experimental setup are shown in
Figure 3.
Figure 3a illustrates the range of beam displacement due to rotation of the off-axis disc, and defines the
x-y coordinate system with respect to the mechanical load. The corresponding beam diagram in
Figure 3b depicts the relative locations of the DOFS through the thickness of the composite (color-coded consistent with the schematic in
Figure 1). The thickness of the 6-ply specimen (in the y-direction), including the embedded fiber sensor, is approximately 3 mm. The profile of the strain
(typically in με) that results is given by
where
P is the applied load,
x and
y represent the position along the beam away from the load and the position off the neutral axis, respectively,
E is Young’s modulus, and
I is the moment of inertia. Hence, Segments 1 and 3 of the DOFS labeled in red and magenta should experience compression and tension, respectively, for the load applied as shown. Segment 2 of the fiber labeled in green is on the neutral axis (ideally at
y = 0), and the blue segments (the unloaded fiber ends exiting and entering the composite) of the DOFS are not loaded. Position
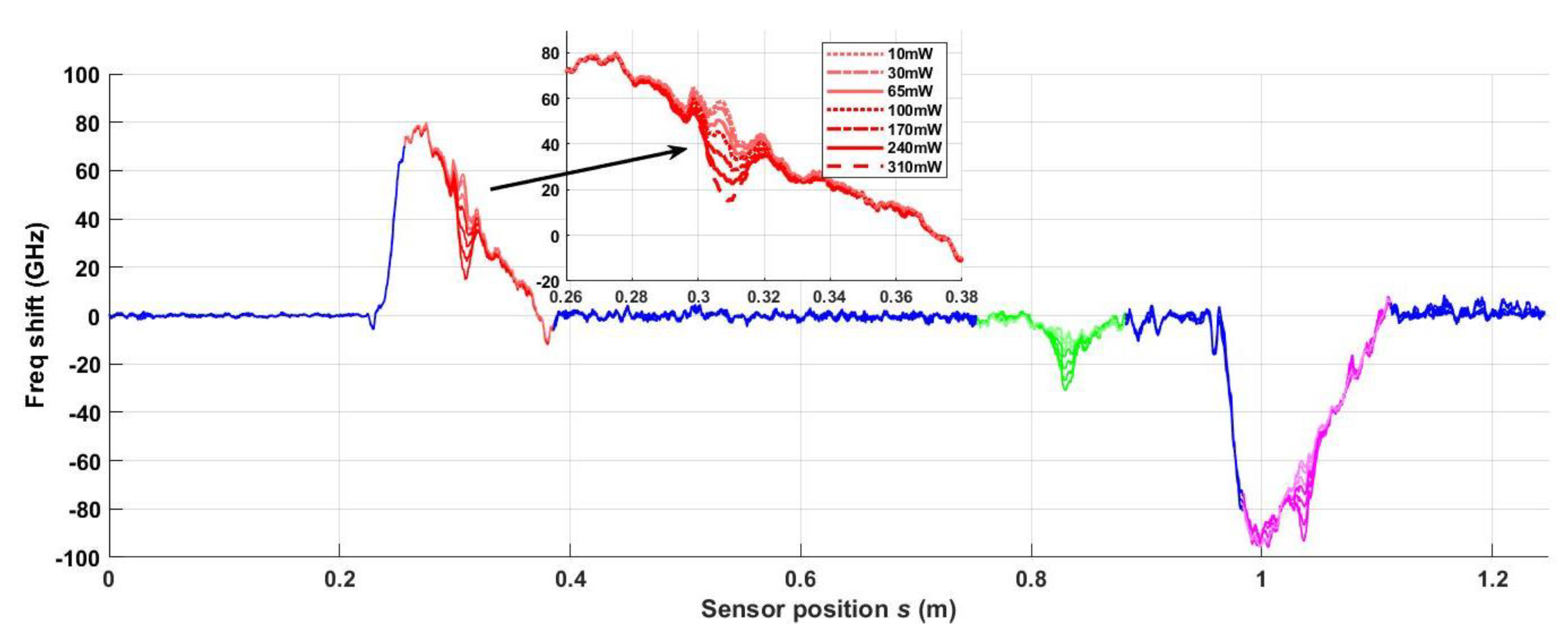
s = 0 in the sensor is defined near the interrogator, and the total length of the sensor is almost 1.2 m.
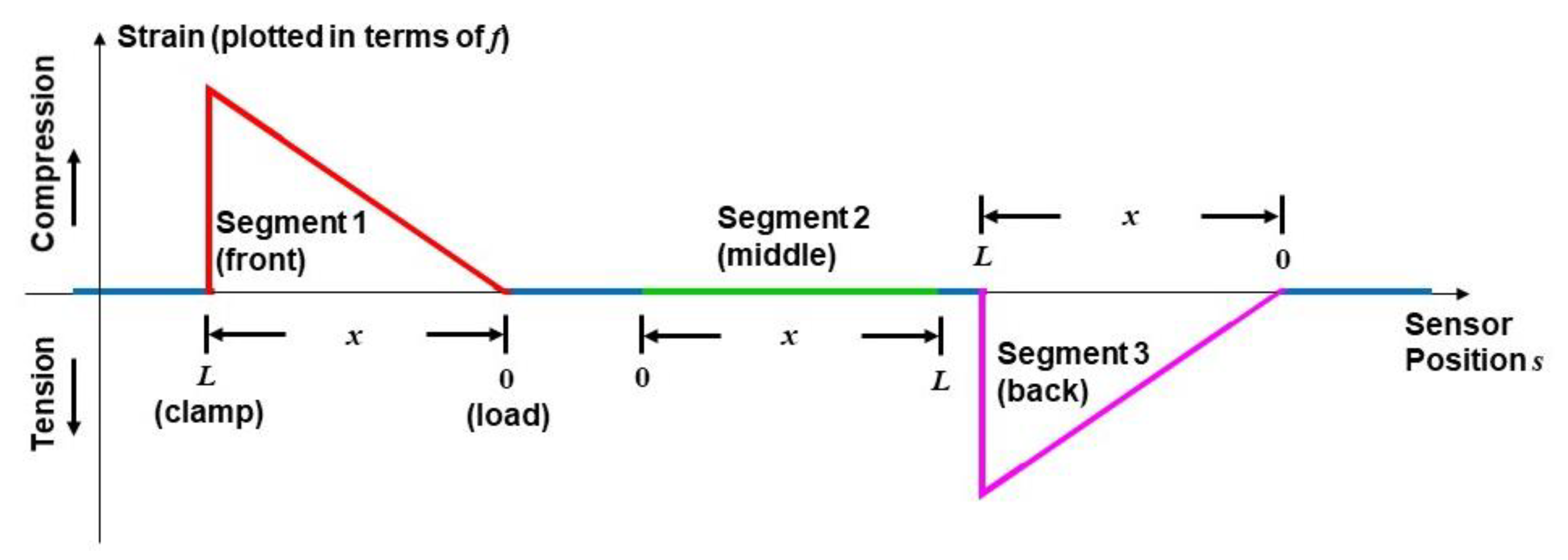
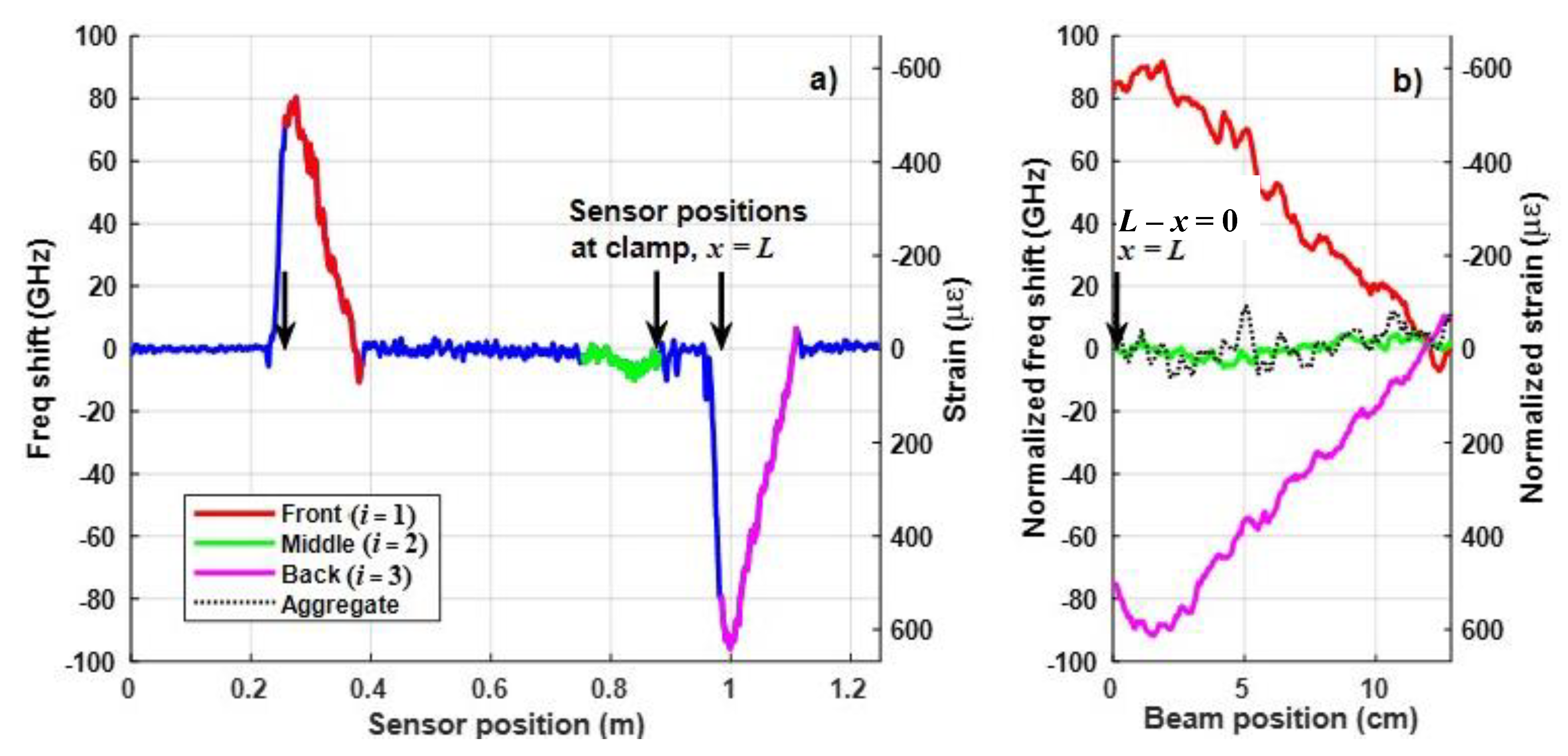
Based on Equations (2) and (3) for the sensor network configuration in
Figure 1, the predicted strain profile detected by the DOFS under cyclic loading at maximum displacement is as shown in
Figure 4. Compressive or tensile strain at each sensor position
s is plotted in terms of frequency shift
f(
s), consistent with how the interrogator will display the response, measuring a positive frequency shift under compression when ε < 0 (and a negative frequency shift under tension when ε > 0). The colors in
Figure 4 correspond to the highlighted segments used for the DOFS in
Figure 1 and
Figure 3.
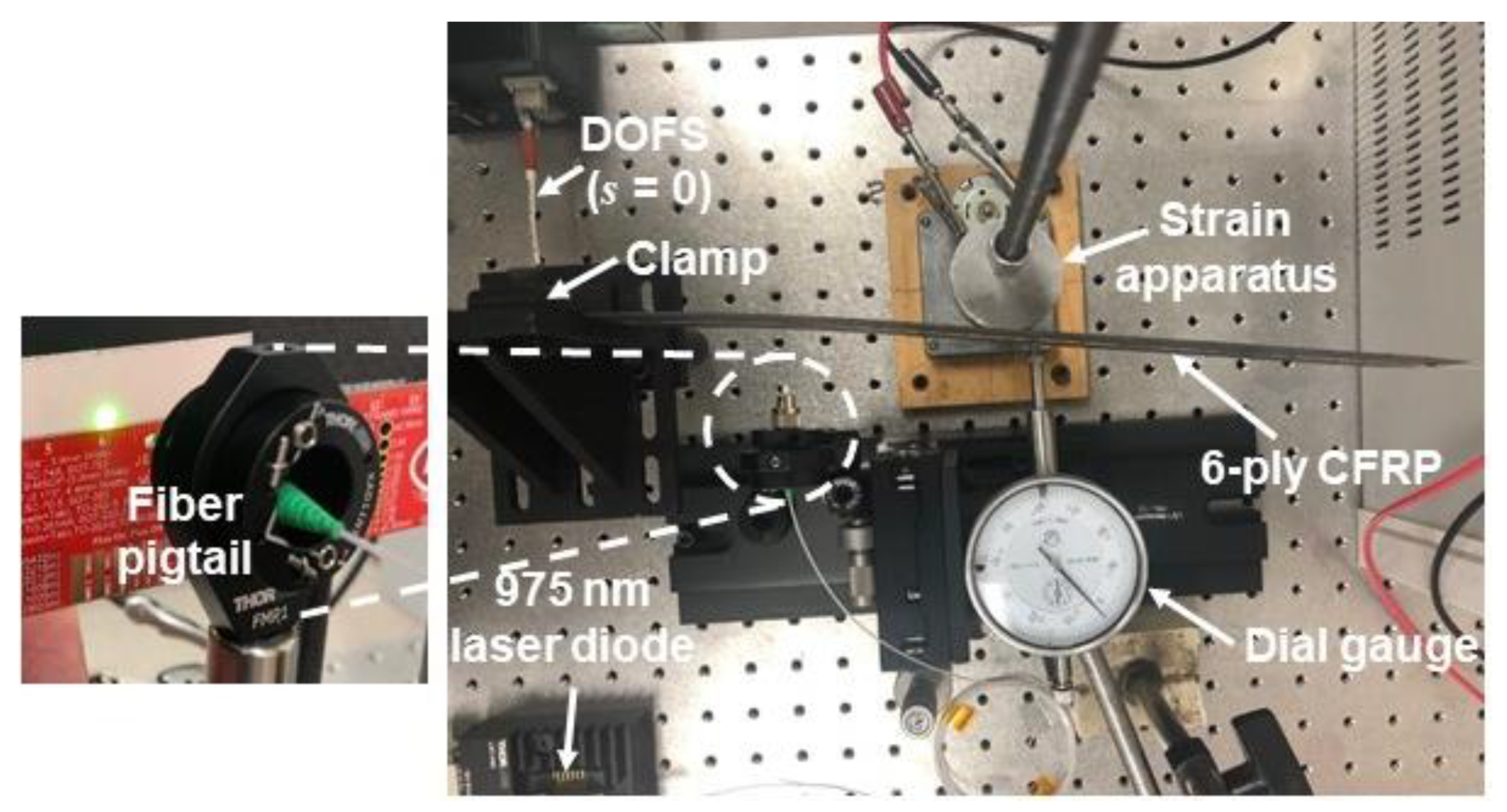
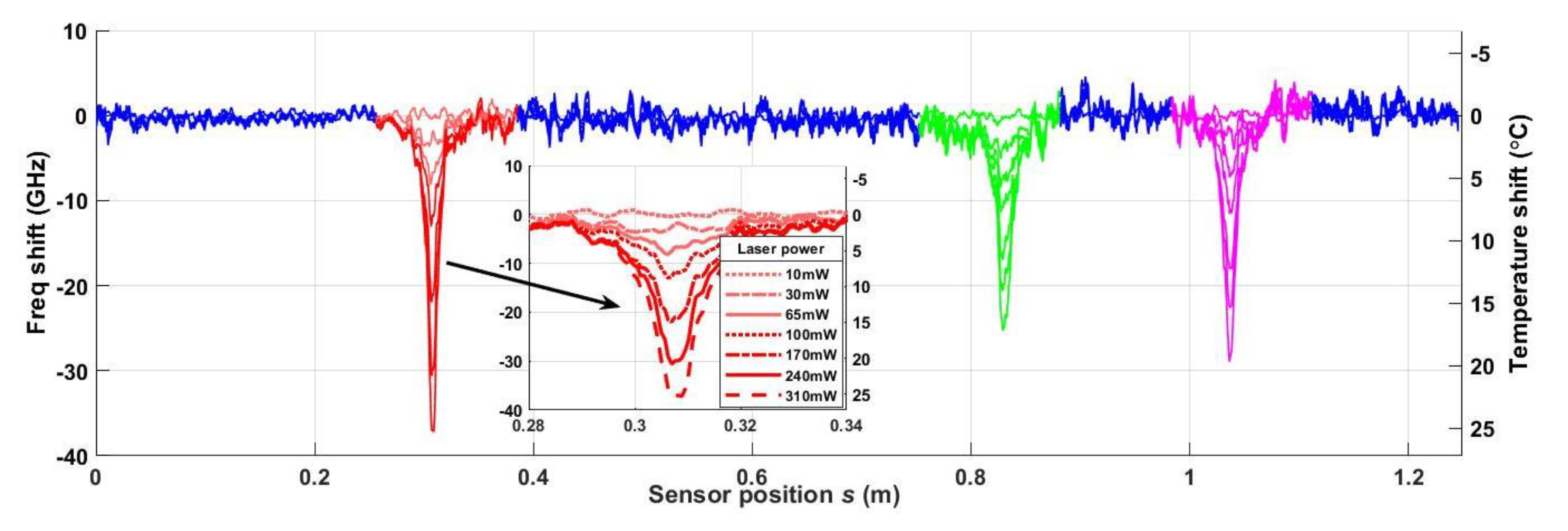
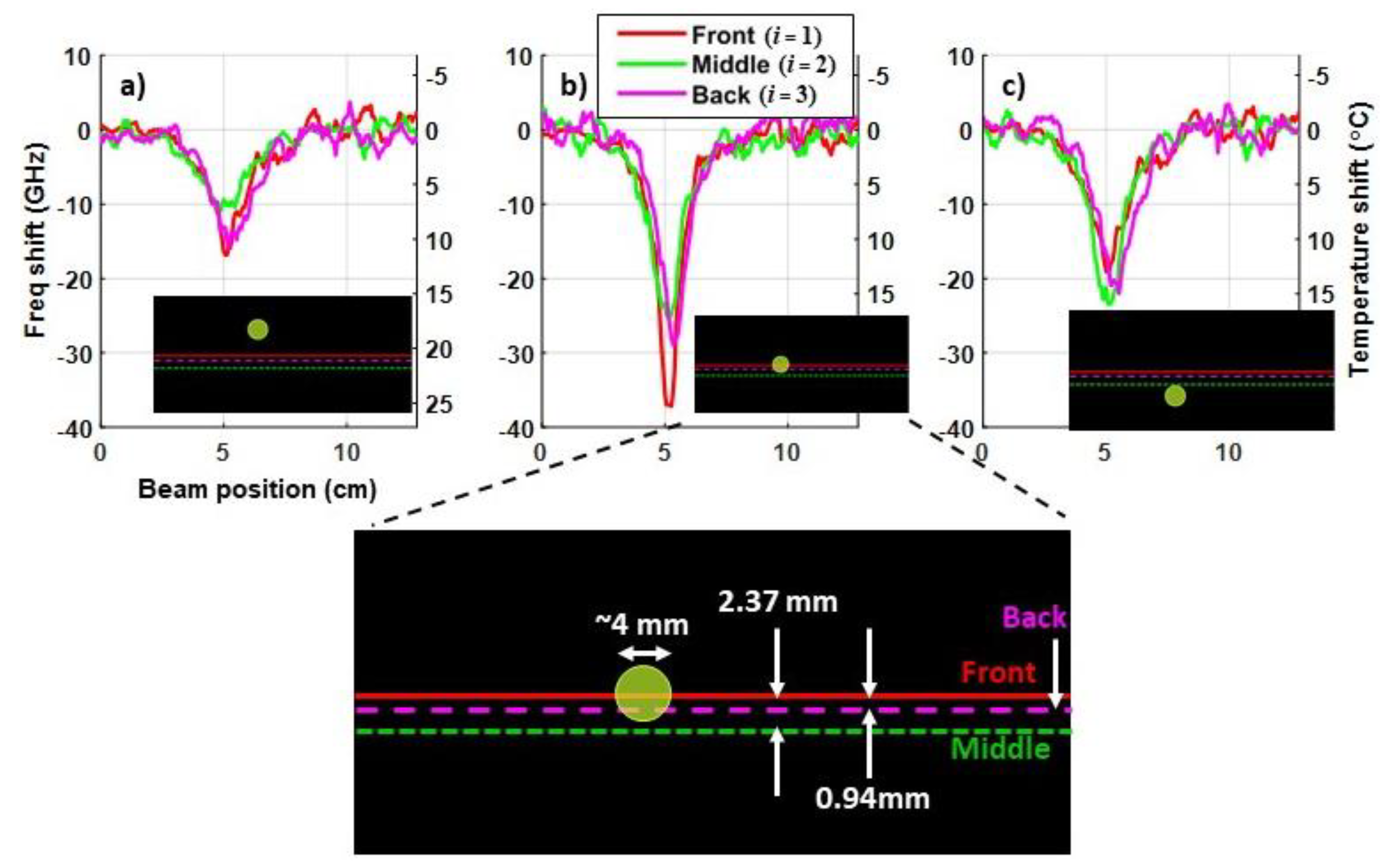
To generate heat in the CFRP, a relatively high power (600 mW maximum) laser diode at 975 nm was used. The experimental setup is shown in
Figure 5. The laser energy was emitted from the fiber optic pigtail on the laser diode. The end of the pigtail was mounted on translation stages with micrometer adjustments to precisely set the location of the laser relative to the specimen. When the tip of the ferrule at the end of the fiber pigtail was 1.4 cm from the specimen, the spot size of the emitted laser light on the specimen was ~4 mm in diameter, as shown on the IR (infrared) viewing card in the inset photo in
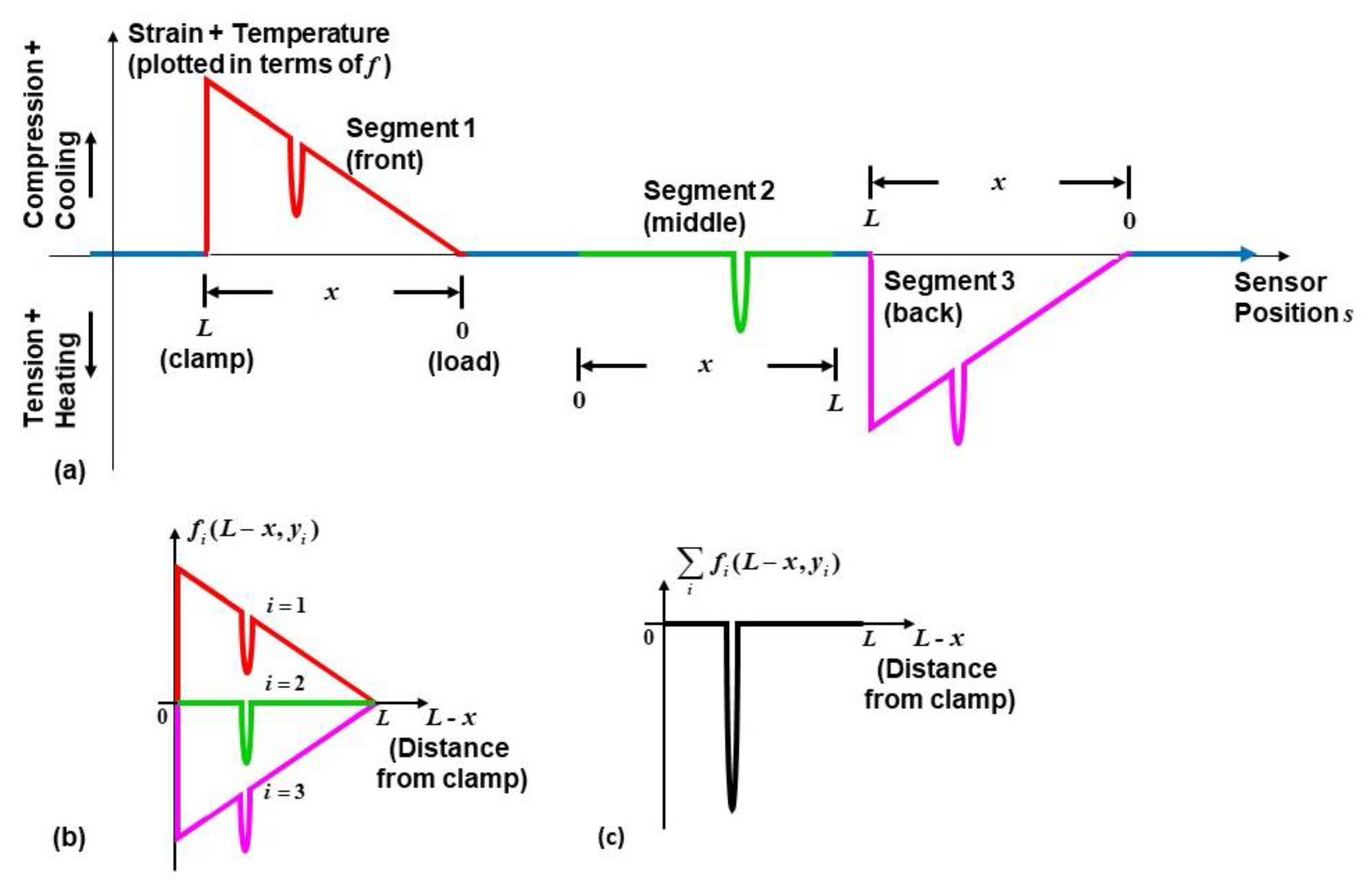
Figure 5. When the laser light is incident on the specimen, the applied energy causes a localized temperature change in the interrogator response curve. The resultant frequency shift measured by the interrogator can include contributions from both strain and localized heating, as depicted in
Figure 6a. Again, the frequency relationships in Equations (1) or (2) are opposite in sign to changes in temperature or strain, respectively, so heating is indicated by a downshift in frequency.
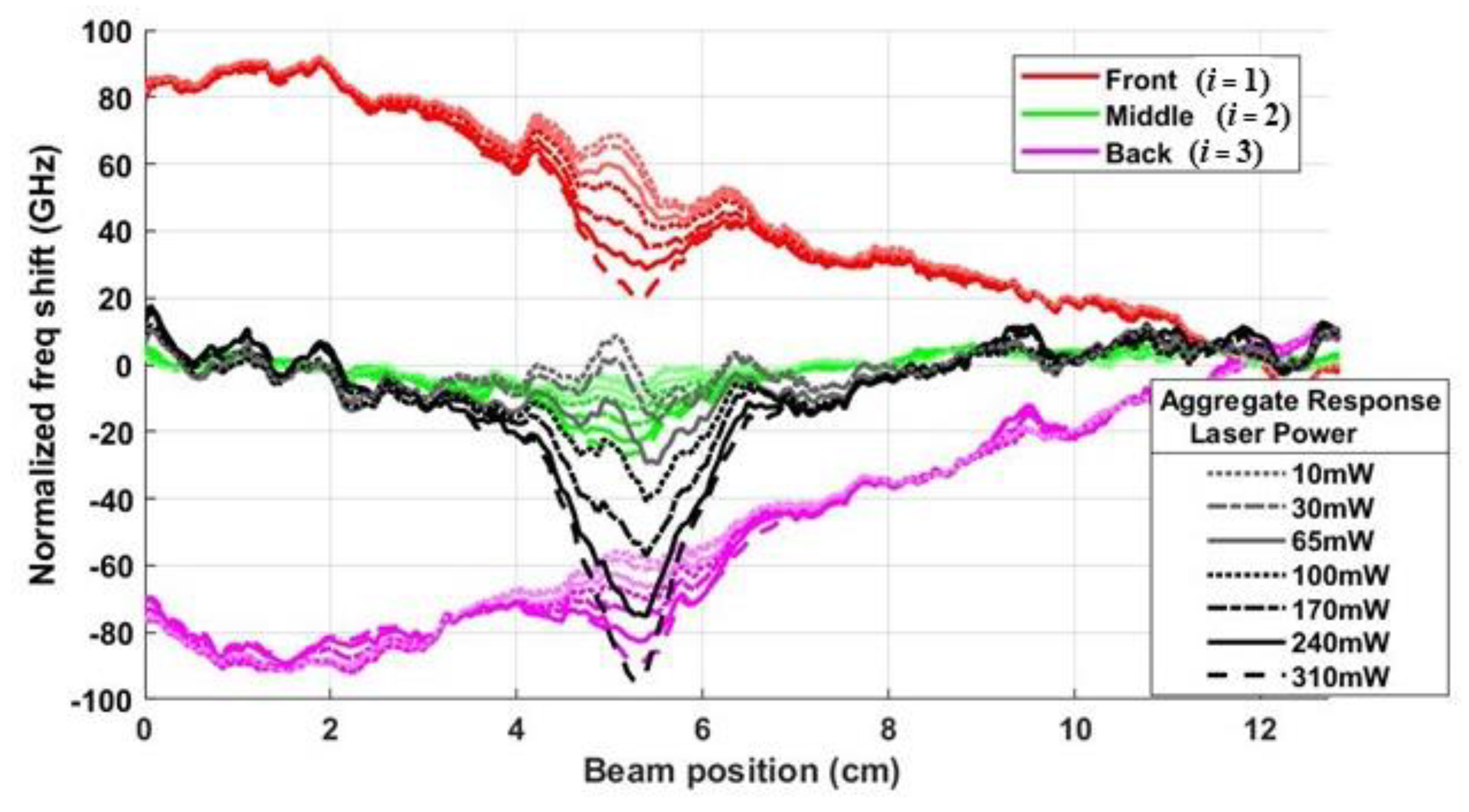
In order to isolate the thermal response from the strain, first, consider a frequency shift in each segment of the DOFS caused by both strain and changing temperature, as shown in
Figure 6a, defined in the x-y reference frame of the beam,
where
for Segment
i = 1, 2, or 3. Here,
and
are the inverse functions of Equations (1) and (2), respectively, at all positions between the load and the clamp, where strain is present under steady state conditions and any temperature response normally occurs as a rapidly changing transient (or impulse) at a localized position on the specimen. Based on Equation (2), the component of the frequency shift (in GHz) resulting from strain in the composite is
with
με/GHz
2 and
με/GHz. However, for a maximum specified strain of
in the Luna sensor, the approximation
holds, therefore the component of the frequency shift
due to strain is linearly related to
for all measurable values of strain. Furthermore, assuming sensor Segments 1 and 3 locations are symmetric about the neutral axis and that Segment 2 lies on the neutral axis, if
is measured independently in each segment and added, the contributions to
due to strain will, in theory, cancel completely since
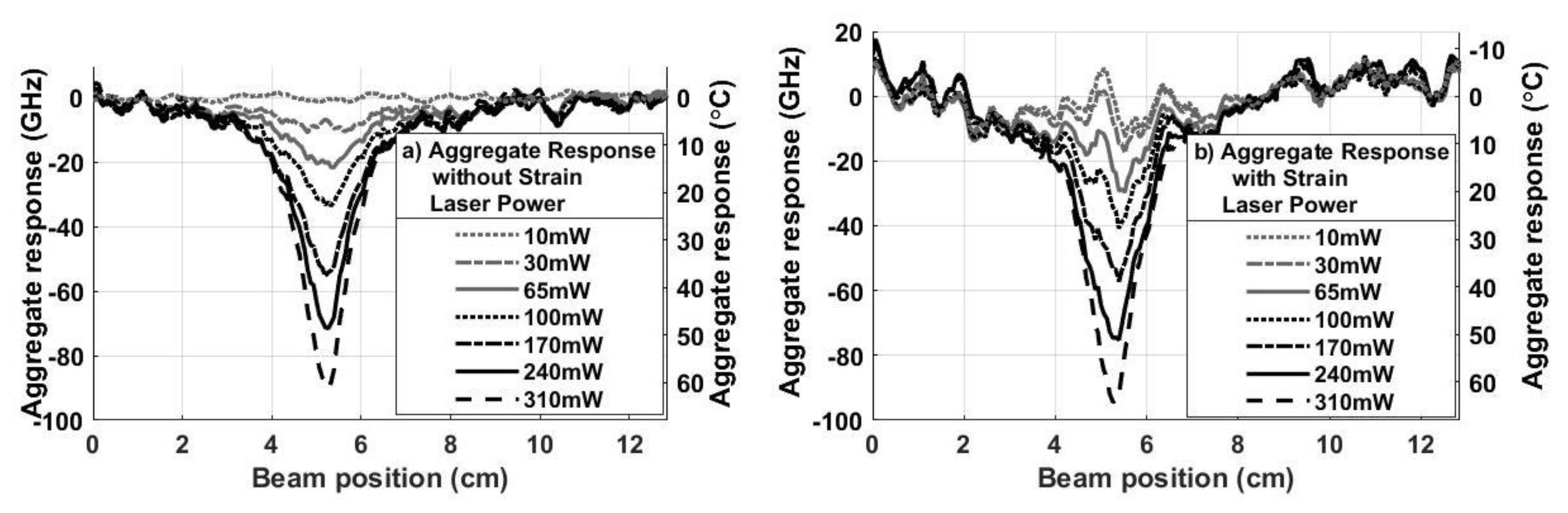
Hence, the aggregate response in GHz will represent an amplified version of the temperature shift due to the incident laser light, isolated from the strain, as in
In Equation (6), the measured temperature shift in each segment is assumed for now to be approximately the same through the thickness of the specimen; in other words,
is independent of
y.
Figure 6b,c illustrate the isolation technique graphically, with each segment response
and the aggregate response
plotted as a function of the distance from the clamp,
.
Further adaptations of the DOFS network can be explored; as an example, increasing the number of DOFS segments to five or seven could provide enhanced amplification of the thermal response, while still eliminating the mechanical response. The signal processing technique implemented in Equation (6) is analogous to the use a full Wheatstone bridge to amplify the sensitivity of strain gage response for stress analysis [
17]. This technique could also be applied in embedded networks of other optical sensors that detect both strain and temperature, such as FBGs, or perhaps when using other novel sensing materials that we have considered [
18,
19,
20,
21]. The next section demonstrates the experimental implementation of the isolation technique.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












