1. Introduction
Two-phase flow through a complex geometry is found in many shell-and-tube heat exchangers including nuclear steam generators, reboilers, evaporators and condensers. High-velocity flow across the tubes of such components is known to produce excessive vibrations due to a variety of flow-induced vibration mechanisms, the most serious of which is fluidelastic instability (FEI) [
1]. In extreme cases, FEI can produce massive tube failures after only a few hours of service, while in other cases, the failures may be long-term due to fretting wear and fatigue [
2]. Evaluating the two-phase flow parameters across tube bundles is crucial to the analysis of vibration excitation mechanisms. These parameters include the temporal and local variation of void fraction and phase redistribution and considered to be essential to determine damping ratio, hydrodynamic mass and fluidelastic instability constants in order to evaluate the stability threshold of tube bundle configurations. In addition, a reliable prediction of the two-phase flow parameters is essential for the development of more efficient, safe and compact steam generating equipment [
3].
The void fraction, or volume fraction, is one of the critical parameters that characterizes the nature of the two-phase flow. It is defined as the fraction of volume that is occupied by the gas phase. It has been challenging for researchers to develop experimental techniques in order to measure such a physical quantity. The prediction of the void fraction in a system in which a two-phase flow is present is the most important step since it determines the performance of the system. Two-phase flows have been known to be quite complex, and in most cases, exist in various patterns that are chaotic and irregular. This contributes greatly to the various types of uncertainties in the experimental techniques that have been developed. Although many correlations have been developed for the void fraction, the accuracy of these correlations highly depends on the reliability of the data, the range over which the data is obtained, and the measurement techniques used. In recent decades, numerous techniques have been developed for measuring the void fraction in order to ascertain precise and reliable data for both local and averaged void fractions [
2].
Despite the importance and the prevalence of two-phase flow in tube bundles, the number of publications and the amount of research available to consider all physical two-phase flow parameters in tube bundles is considerably lower than those for pipe flow. This lack of publications is partly due to the difficulty of performing experiments and obtaining reliable void fraction measurements in such complex geometry. For example, Taylor and Pettigrew [
4] studied two-phase flow-induced vibration (FIV) to determine the critical velocity for fluidelastic instability in tube bundles. This paper emphasized how the analysis of flow-induced vibrations is strongly dependent on the void fraction and the flow pattern but it did not provide a detailed and reliable evaluation of two-phase void fraction measurements.
Noghrehkar et al. [
1] performed experiments to identify flow patterns across triangular and square tube bundles. The flow patterns were identified visually through the side window and also by using void fraction measurements collected from a resistive probe installed in the core of the bundle. Under certain conditions, Noghrehkar et al. [
1] observed a bubbly flow pattern near the window while the resistive signal approach identified intermittent flow away from the wall. These findings might indicate that predictive methods based on visual observations may not give an accurate flow pattern identification, especially away from the wall. On the other hand, Kanizawa [
5] objectively identified the flow pattern inside a normal triangular tube bundle using signals from pressure transducers and capacitive sensors. The
k-means clustering method, which was based on signals from the pressure transducers and the capacitive sensors, was used to identify the flow pattern. Results were compared with predictive methods available in the literature and showed a satisfactory agreement for identifying flow patterns.
Xu et al. [
6] and Schrage et al. [
7] used the quick closing valve technique for measuring the volumetric average void fraction in both an external and internal two-phase flow. In this technique, two quick closing valves at both ends of the flow channel are simultaneously closed trapping the fluid in the volume. The volumetric void fraction is then determined by measuring how much of the liquid is occupying the boundary. The quick closing valves method does not, however, give the instantaneous void fraction measurement and cannot be utilized when FIV data is needed. To implement this technique, one must also stop the flow, which is not always convenient.
Flow visualization and image processing techniques have been employed for void fraction measurements. High-speed imaging and good lighting are essential for this technique to work. This technique can be somewhat subjective as different contrast thresholds can be used to distinguish between the two phases. In addition, an image captured at a particular depth or focal point is influenced or cluttered by the flow at a different focal point. Iwaki et al. [
8] conducted a study in which they estimated the void fraction by analyzing flow images across square and triangular tube bundles. From this analysis, Iwaki estimated the size and concentration of the bubbles.
Ursenbacher et al. [
9] measured the void fraction of a refrigerant flowing through a horizontal tube. This was done by mixing a dye with the refrigerant and then illuminating it using a laser sheet. The laser sheet was placed perpendicular to the tube axis. High-speed images were captured and analyzed to extract the measurements. It was found that the refraction of light at the gas–liquid interface may introduce some noise to the measurement.
Gamma-ray densitometry, developed in the 1950s, is a non-intrusive measurement method that is commonly used for a line-averaged void fraction and is considered one of the most accurate void fraction measuring techniques. In this technique, gamma rays are directed from one side of the cross-section and received in a detector placed on the other side. The difference in the intensity between the emitted and the received rays are related and calibrated to the average void fraction along the ray line. Feenstra et al. [
10] used gamma-ray densitometry to measure the void fraction across tube bundles. This method works because the absorption of the gamma rays is dependent on the density and the void fraction of the fluid. Despite its accuracy, this technique has many disadvantages including high costs, safety concerns and a slow response time.
Capacitance sensors can be designed as either intrusive or non-intrusive instruments to measure the volume average void fraction. Simplicity and cost are the main advantages of the capacitance sensor. This approach also gives a real-time measurement of the void fraction. Unlike the resistive probe sensor, the capacitance sensor works well with non-conductive water. The capacitance values of the sensor are highly dependent on the flow pattern [
11]; for example, a bubbly flow with a 10% void fraction can give a higher capacitance value compared to an annular flow with the same void fraction. To get around this issue, the flow pattern has to be identified before determining the void fraction reading. Flow pattern can be predicted by using either flow pattern maps or by interpreting the probability density function (PDF) and the power spectral density (PSD) of the signal [
12]. Only two experimental studies were found that used a capacitance sensor to measure the void fraction in tube bundles [
13,
14].
Kanizawa [
13] performed void fraction measurements for a bubbly flow inside a vertical tube bundle using a capacitance sensor. The capacitance sensor was made from a pair of electrodes installed facing each other. Each electrode was surrounded by two other shielding electrodes to minimize noise. The probes were molded in epoxy to insulate them from the water and to prevent the flow of electrons; hence, a stable electric field could be produced. Kanizawa [
13] used the normalized capacitance signal under quiescent liquid and low superficial gas velocities with void fraction measurements found using the gravimetric method. The gravimetric method only works for small bubbly flows, which occur under very low superficial air and liquid velocities. Kanizawa’s [
13] results show that for small bubbles, the normalized capacitance was slightly smaller than the void fraction measurement using the gravimetric method. The capacitance signal was linear for a small bubbly flow. Similarly, Watanabe [
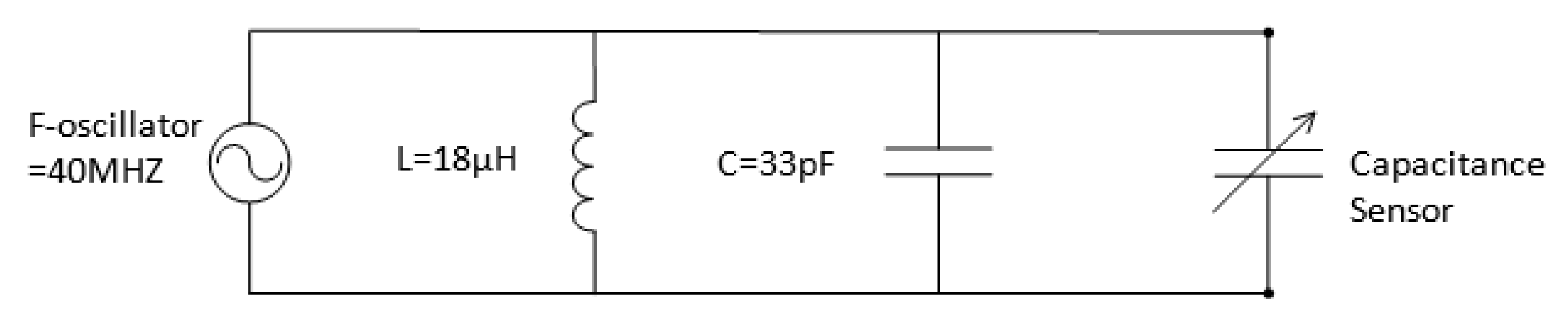
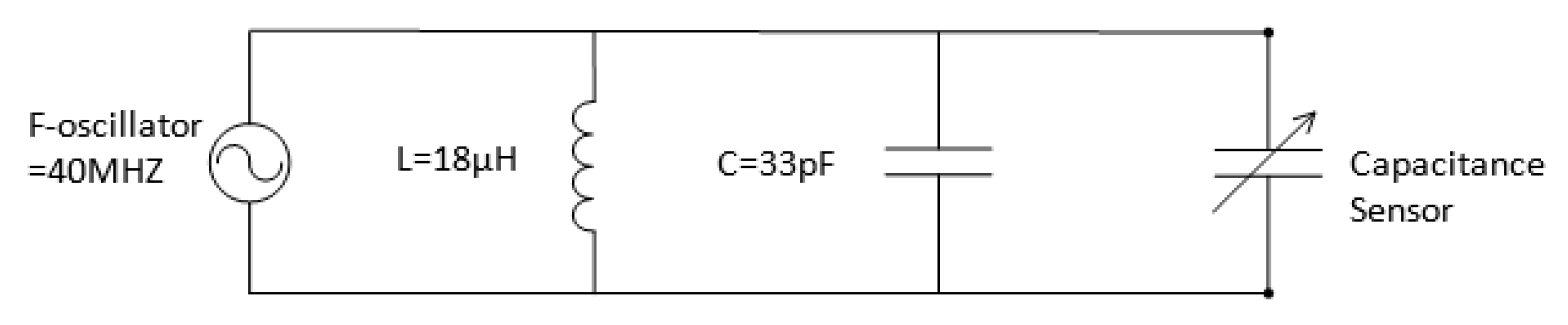
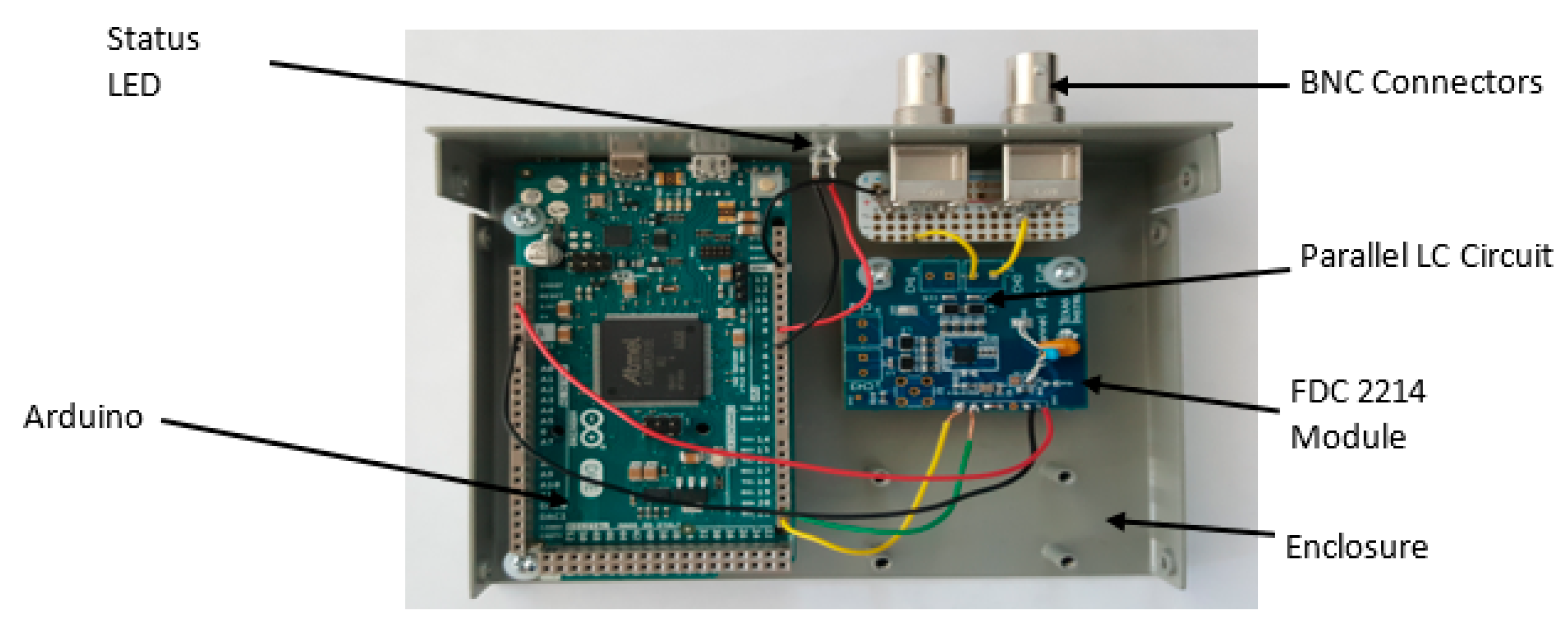
14] developed a capacitance void fraction measurement method for a Boiling Water Reactor (BWR) test and compared the data with void fraction measurements using the quick closing valve method to validate the measurements. The capacitance probes were placed outside the casing of the tube bundles. An LRC (inductor, resistor and a capacitance) circuit was used to measure the frequency response of the capacitor. Based on the frequency response, the capacitance value was computed. Results from these experiments showed a very good agreement between the void fractions measured using the capacitance sensor and the quick closing valve method. The void fraction values from the capacitance sensor were 4% to 8% larger than the quick shut method. The difference between the two methods decreased with an increasing mass flow ratio or void fraction. Chen et al. [
15] performed finite element method (FEM) analysis to compute the effective permittivity of a two-phase disordered composite material as a function of the volume fraction. The simulation was done for three different dielectric contrasts with the highest contrast being one to thirty. The inclusion material was arranged randomly in a 10 × 10 × 10 cube cell. Ten random distributions of the inclusion material were generated for each void fraction. Results show that the highest permittivity contrast ratio had the highest standard deviation. The highest maximum relative error to the mean was about 5%.
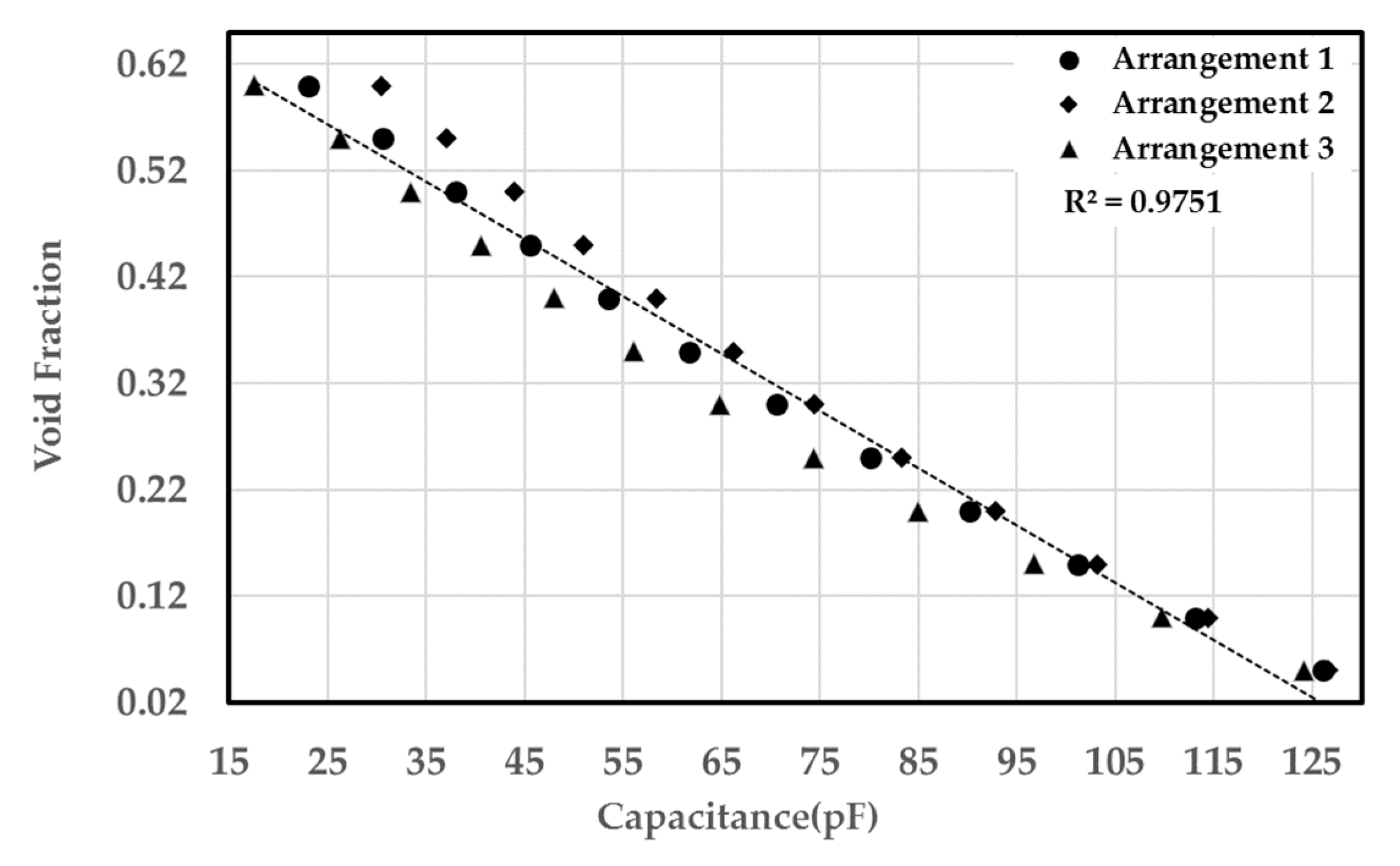
The main objective of the current study is to validate the operating principles of a newly designed sensor for measuring the void fraction in a tube bundle. This sensor is designed to provide detailed information on two-phase flow distribution within tube bundle arrangements with the capability of measuring both the local and average void fraction. Finite element analysis was used to optimize the sensor design and maximize its response. Simulation results were also used to calibrate the sensor for an air–water mixture by scaling the normalized capacitance value to match the actual void fraction. Moreover, the operation of the sensor was expanded to other applications and fluids by testing it for applications involving the refrigerant R123 commonly used for two-phase flow lab experiments.
2. Working Principles and Sensor Design
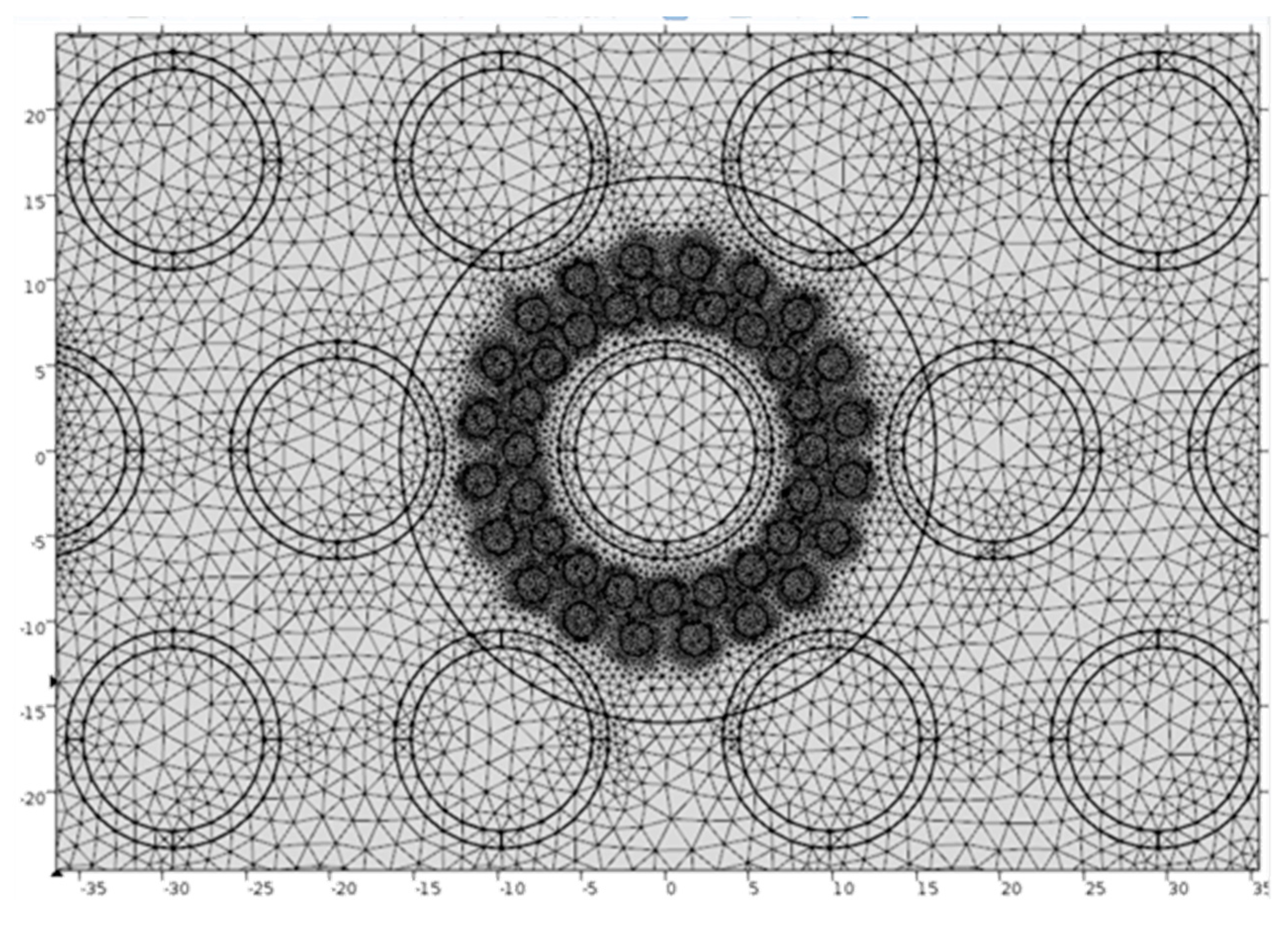
A capacitor sensor was designed, modeled and built to measure the volume-averaged void fraction of a vertically upward flow through a thirty-degree triangular tube bundle. The design of the capacitance sensor and the sensor configurations are discussed in detail in this section. Moreover, a two-dimensional computational finite element model is presented along with the computational mesh. These computational results were used to study the response of the sensor and relate the normalized capacitance signal to the void fraction. A capacitor is a device used to store an electrical charge, measured in farads, which is the change in the electric charge (
q) per unit change in the electric potential (
V):
Capacitors are made of an anode and a cathode plate (combined as electrodes) separated by a dielectric material. The dielectric material is an insulating material that can be polarized by applying an electric field. This electric field is generated between the anode and cathode terminals because of the potential electric difference between them. The electric field polarizes the dipoles in the dielectric material by rotating the charged molecules making the positive side in line with the electric field. The energy is stored in the dielectric material through this polarization process. The electric field can be thought of as a force while the charged molecules are a spring. Polarizing the molecules is like compressing the spring and storing the potential energy. Just like different materials have different stiffnesses, dielectrics have different permittivities. The permittivity of a dielectric is a measure of the resistivity encountered by the electric field in a medium, with units of farads per meter or Newtons per meter squared. Dielectric materials are characterized by their relative permittivity, which is also known as the dielectric constant. The dielectric constant is the permittivity of a material relative to the absolute permittivity of the free space, which is 8.85 × 10−12 F/m. Permittivity is not always constant as it is affected by many variables, such as the position in the medium, the frequency of the field applied, the humidity and the temperature.
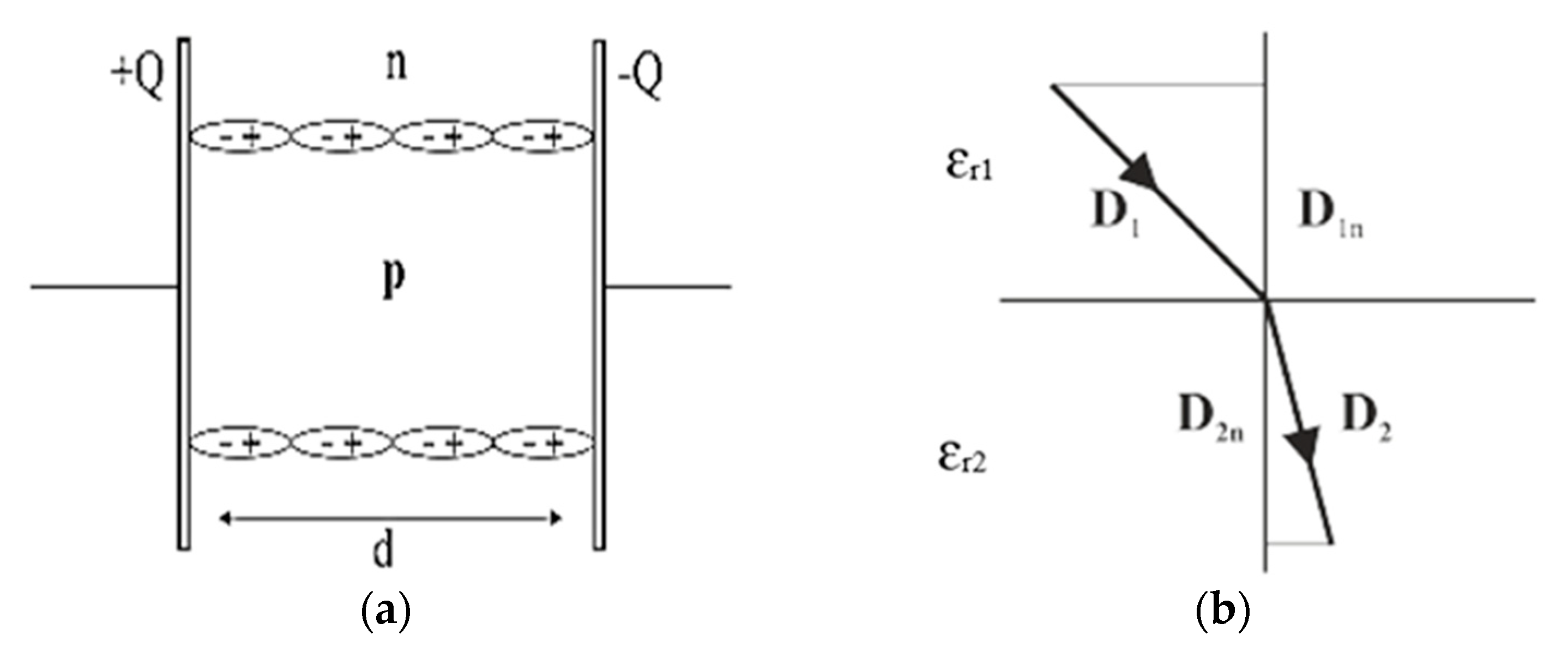
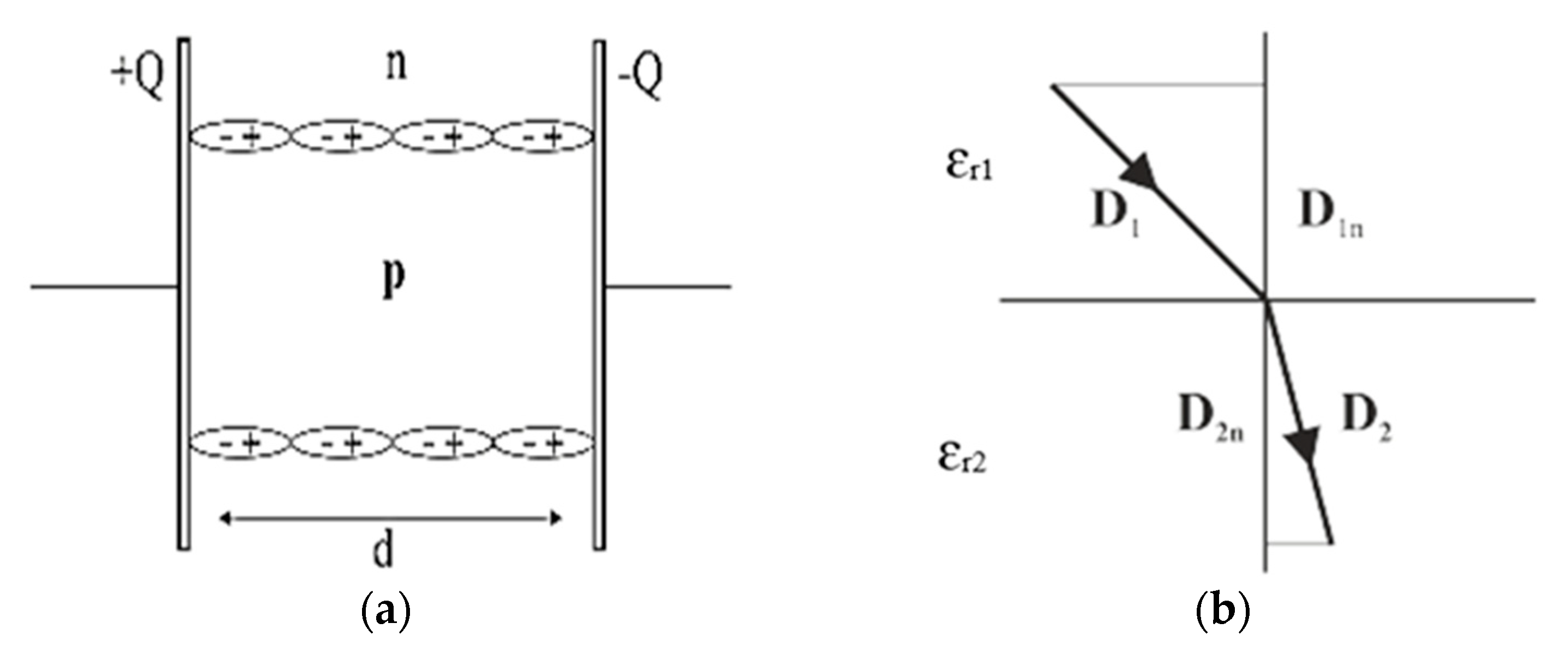
Dielectrics can be either polar or non-polar. Water is an example of a polar dielectric. In a water molecule, the hydrogen atoms have a partial positive charge while the oxygen atom has a partially negative charge. Initially, the water dipoles are randomly aligned. When the water molecules are inserted inside an electric field, the dipoles align themselves with the direction of the electric field. Non-polar dielectrics are composed of atoms with no permanent dipole moments. The atoms are made of positively charged nuclei with negatively charged electrons orbiting around them. The electrons are not static but are instead continuously orbiting the nuclei in a cloud. The negative charge of the electrons is equal to the positive charge of the nuclei. This results in neutral atoms with no net charge. In the absence of an applied electric field, the center of the negatively charged cloud of electrons coincides with the center of the positively charged nuclei. When an electric field is applied, the center of the positive charge gets pushed in the direction of the electric field while the center of the negative charges gets pulled in the opposite direction. This results in a dipole moment like the one in
Figure 1a. The dipole moment of a non-polar dielectric can be represented by a pair of equal and opposite charges separated by a distance.
Since an air bubble passing between two electrodes is a non-polar dielectric, the individual atoms are polarized and the centers of the charges are stretched away from each other. On a macroscopic scale inside the air bubble, the electric effects of the dipoles cancel out because the net charge inside the bubble is zero. The positive dipole of an atom in the air faces the negative dipole of another atom resulting in a zero-charge density inside the bubble. The surface of the bubble, however, is positively charged on one side and negatively charged on the other. This is because there are no atoms on the poles to neutralize the charges. The positive surface of the bubble is partially in line with the electric field as shown in
Figure 1a. The polarized molecules create a small electric field opposite to the applied electric field, which reduces the overall electric field in the capacitor. This also reduces the potential across the terminals. When a constant voltage source is applied to the terminals, a charge begins to accumulate on the surface of the terminals to increase the potential, thus increasing the electric field in the dielectric.
Now, consider two dielectric materials that are connected by a surface interface between them as shown in
Figure 1b. The upper and the lower normal surface vectors are
A1 and
A2, respectively:
As both dielectrics do not have free charges, the electric displacement (
D) flux is zero. As the area is perpendicular to the field, so the integral over this section is zero. In addition, the integral on the face that is outside the capacitor where
D is zero.
The electric displacement can be obtained using the dot product between the electric displacement vector and the normal surface vector as:
In order to determine the electric field at the contact region, it is assumed that a narrow loop encloses the interface of the dielectrics. The part of the loop parallel to the interface is denoted by s and −s vectors. The part of the loop normal to the surface is insignificant compared to the parallel component. Now, the closed loop integral of the electric field (
E) is zero:
Then, the electric field tangent to the interface is determined using the dot product between the vector
s and the electric field.
Sensor Design
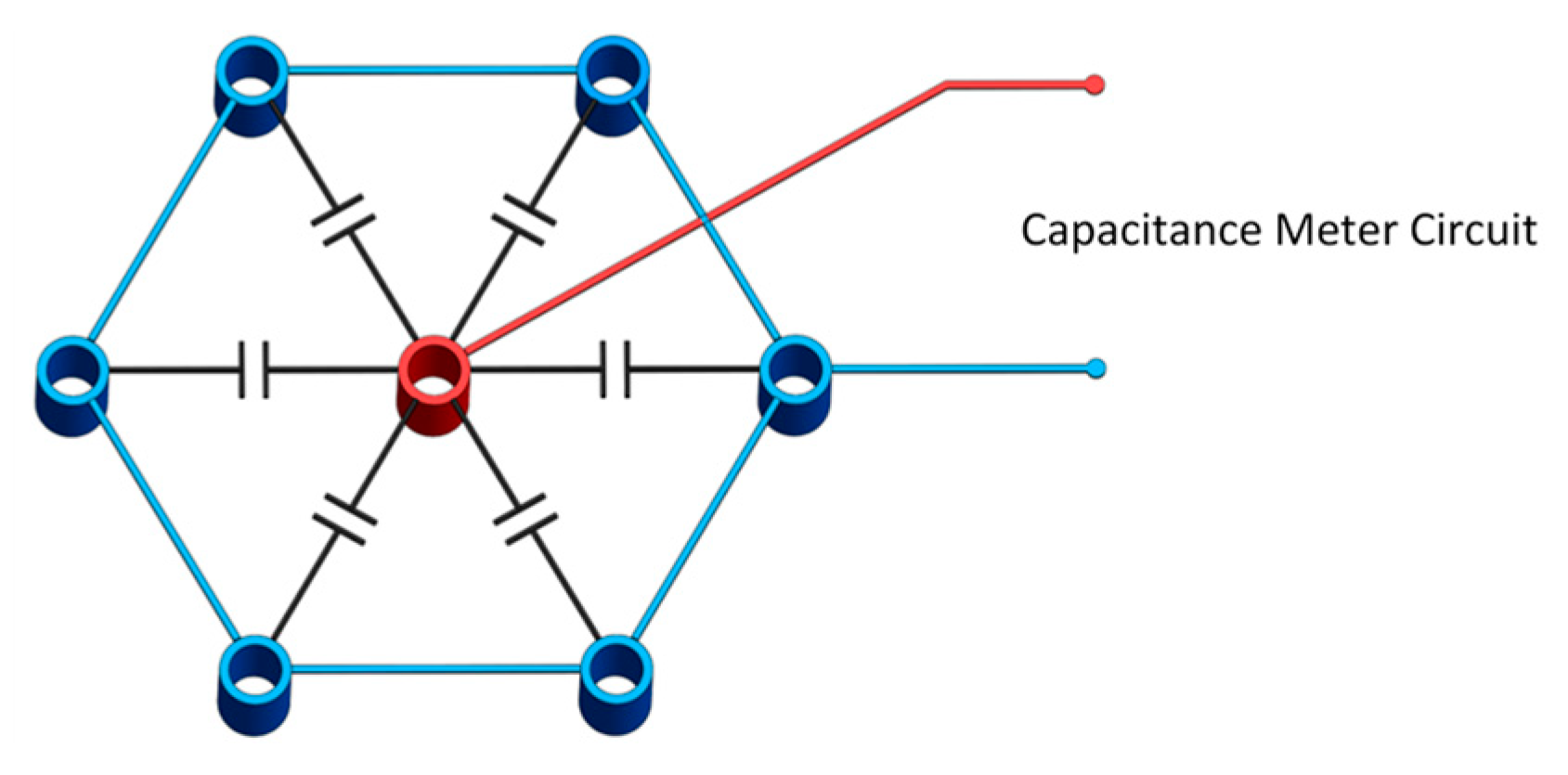
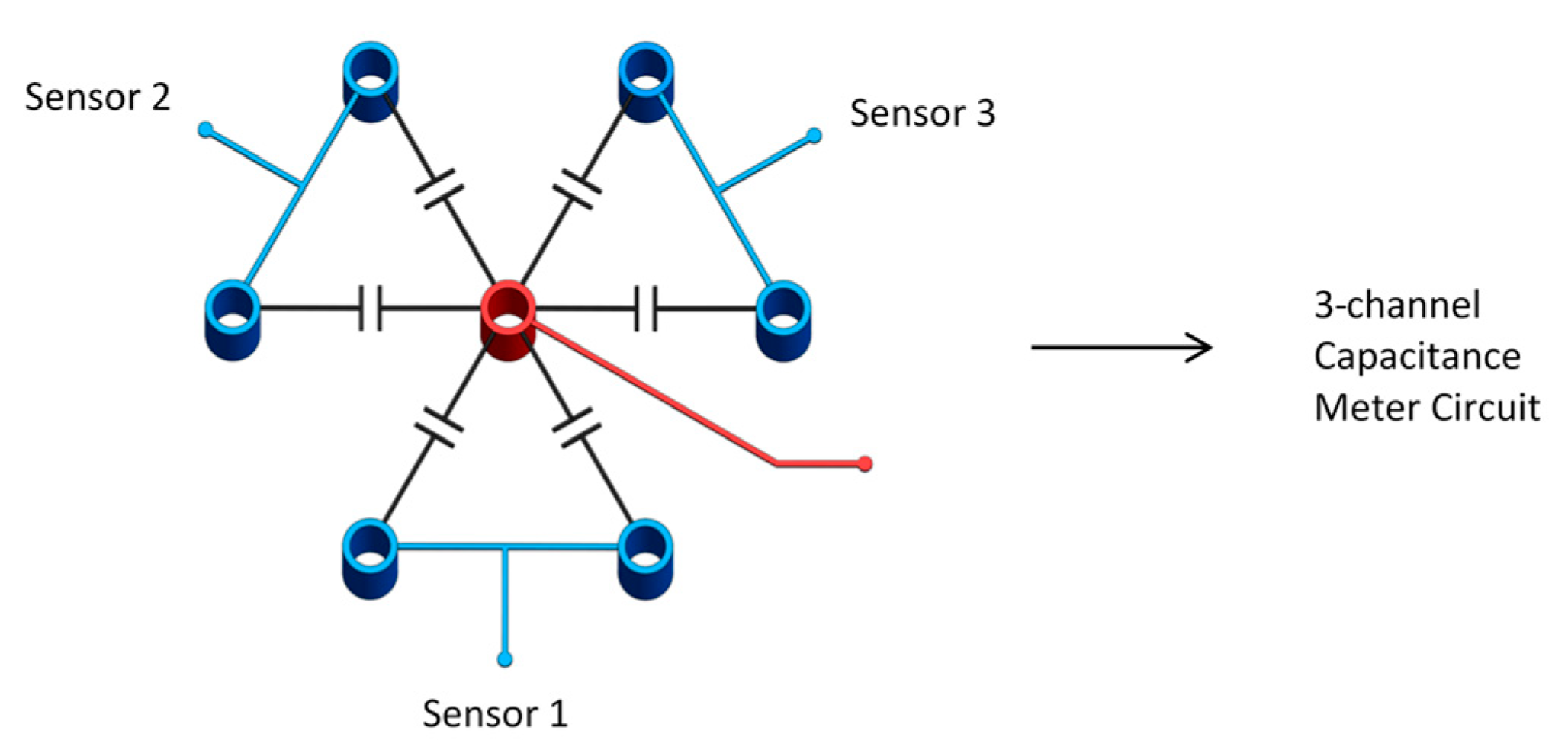
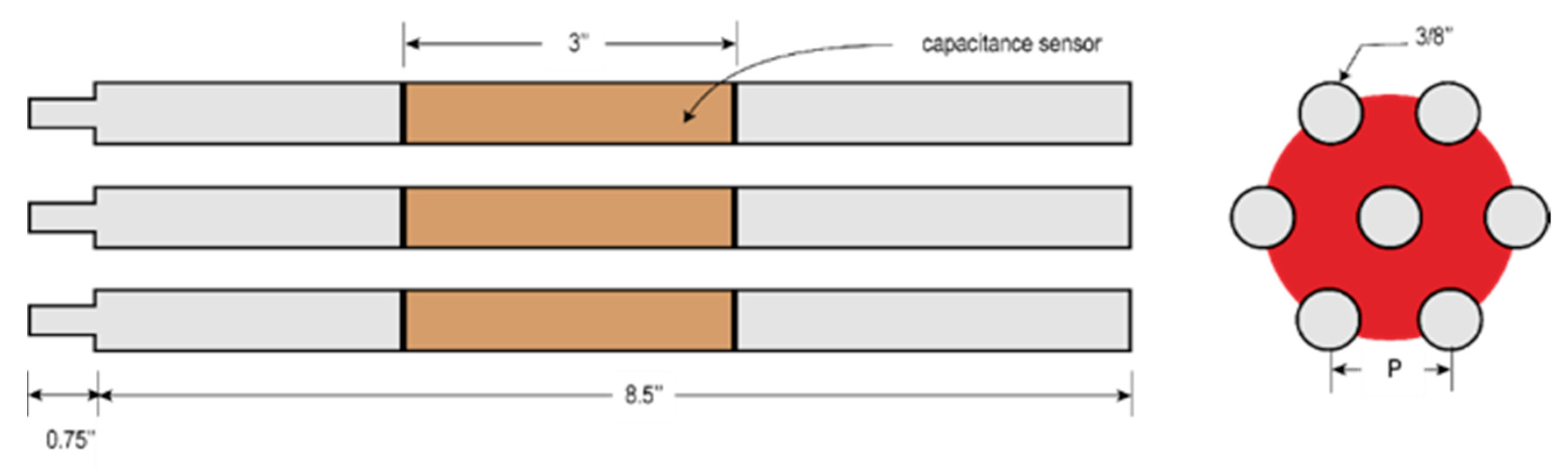
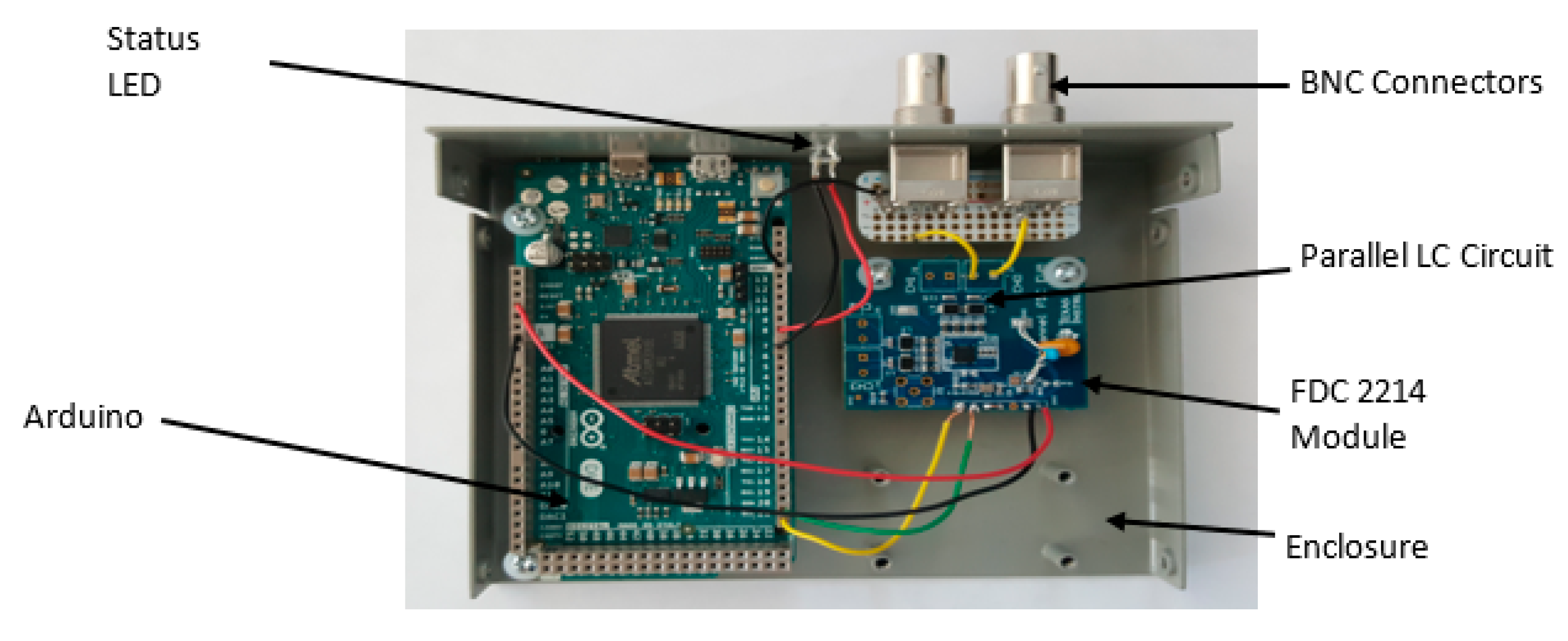
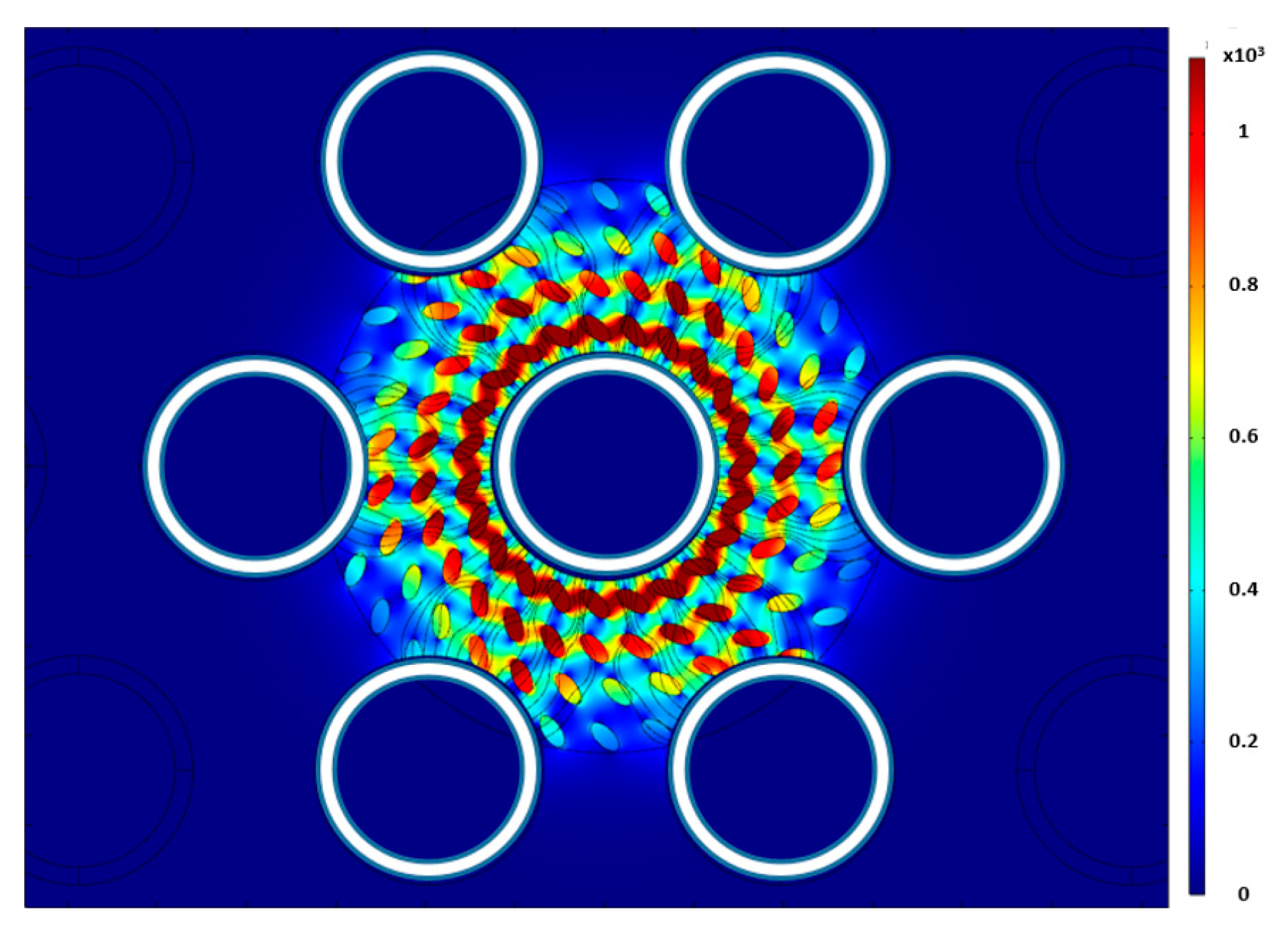
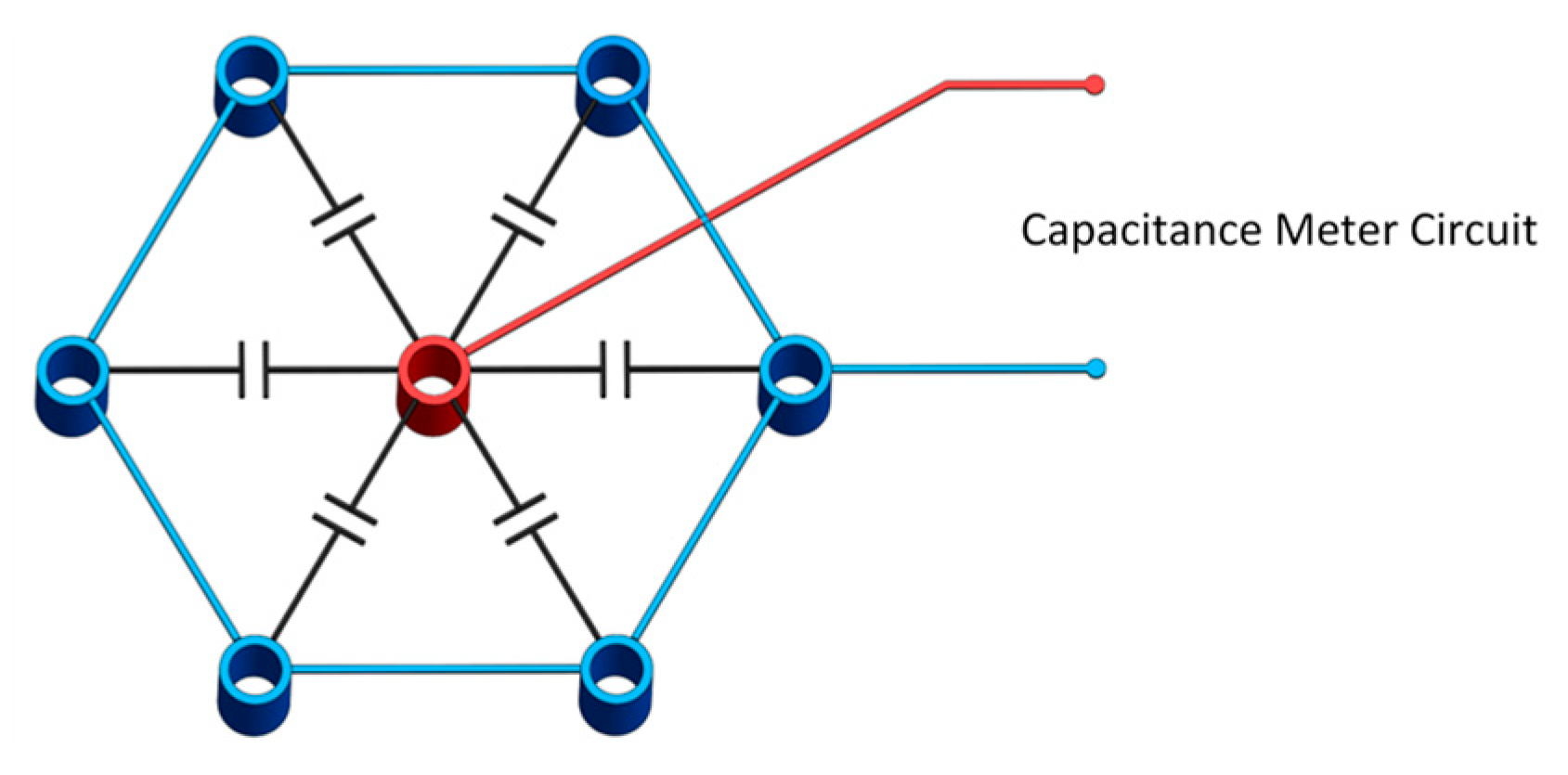
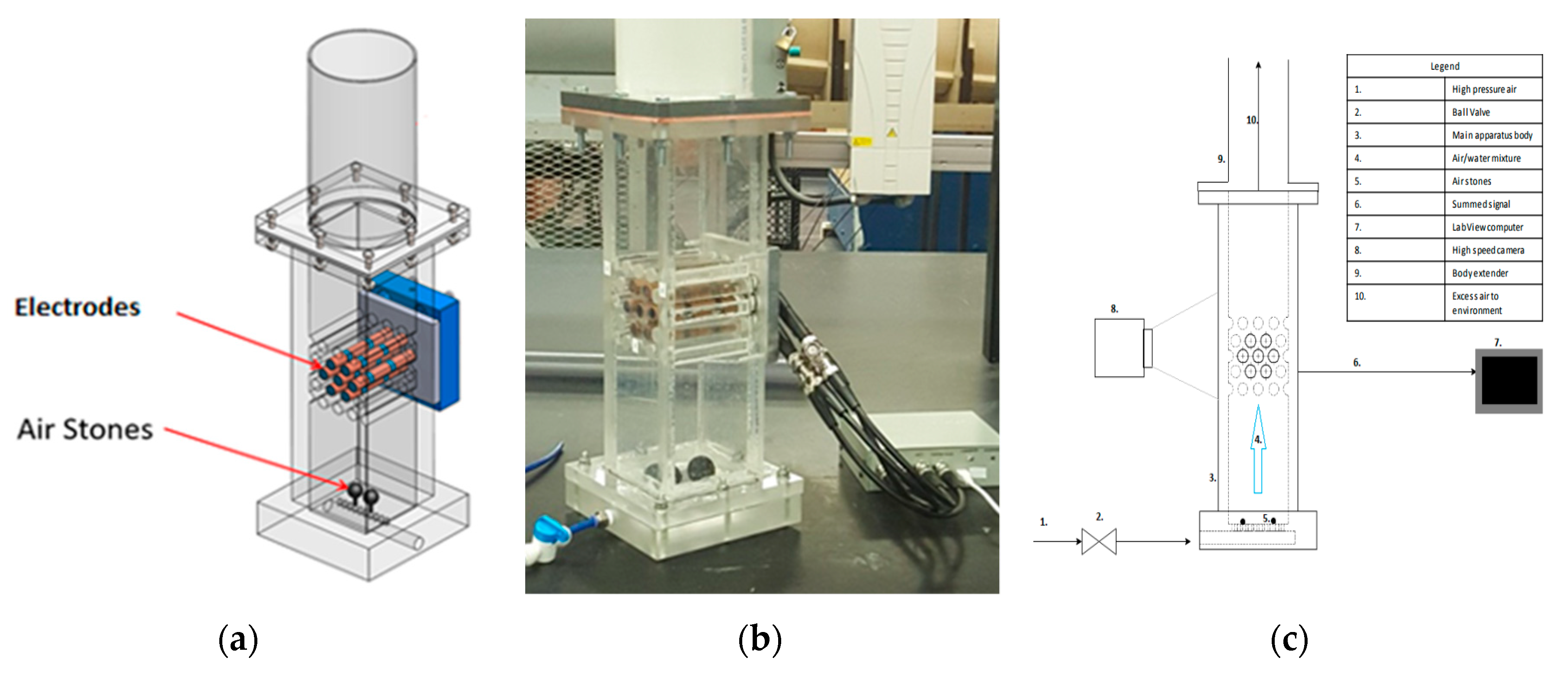
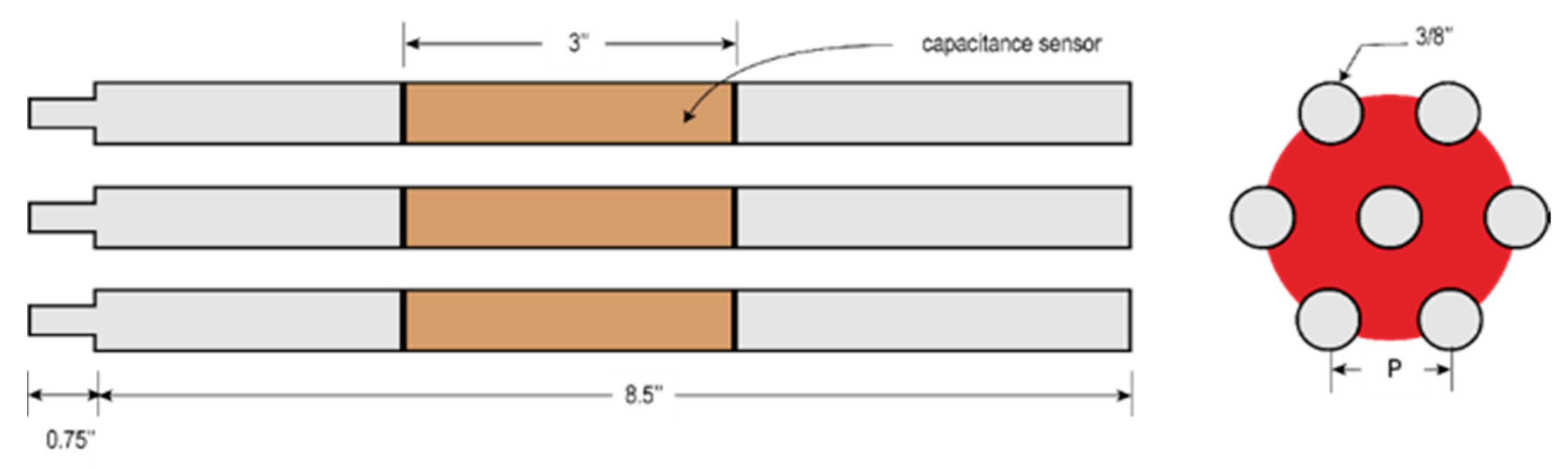
The present capacitance sensor consists of seven cylindrical copper electrodes arranged in a bundle as shown in
Figure 2 and
Figure 3. Each electrode is made of a 12.7 mm diameter copper tube filled with resin. Copper rings are placed on the top and the bottom of each electrode to shield them from any surrounding noise. The surface of each electrode is coated with a thin layer of varnish to insulate it from the liquid. This allows the electric field to pass while blocking the electric current.
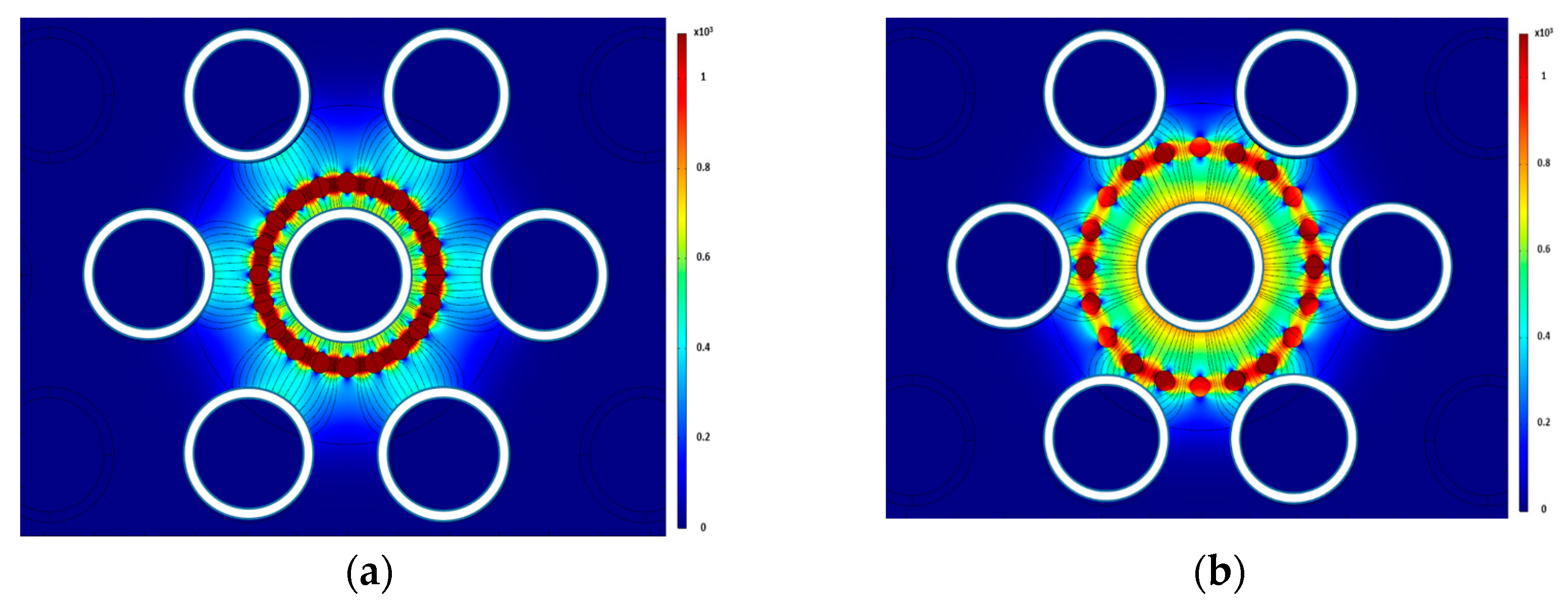
As the gas–liquid mixture flows through the electric field between the electrodes, the total dielectric constant changes depending on the gas-to-liquid ratio. The principle behind this is the considerable difference in the dielectric constant between the gas and liquid, which are 1 and 80, respectively. As the air-to-water ratio changes, the capacitance (C) also changes according to the relation:
where
is the primitivity of the free space and
is the relative primitivity.
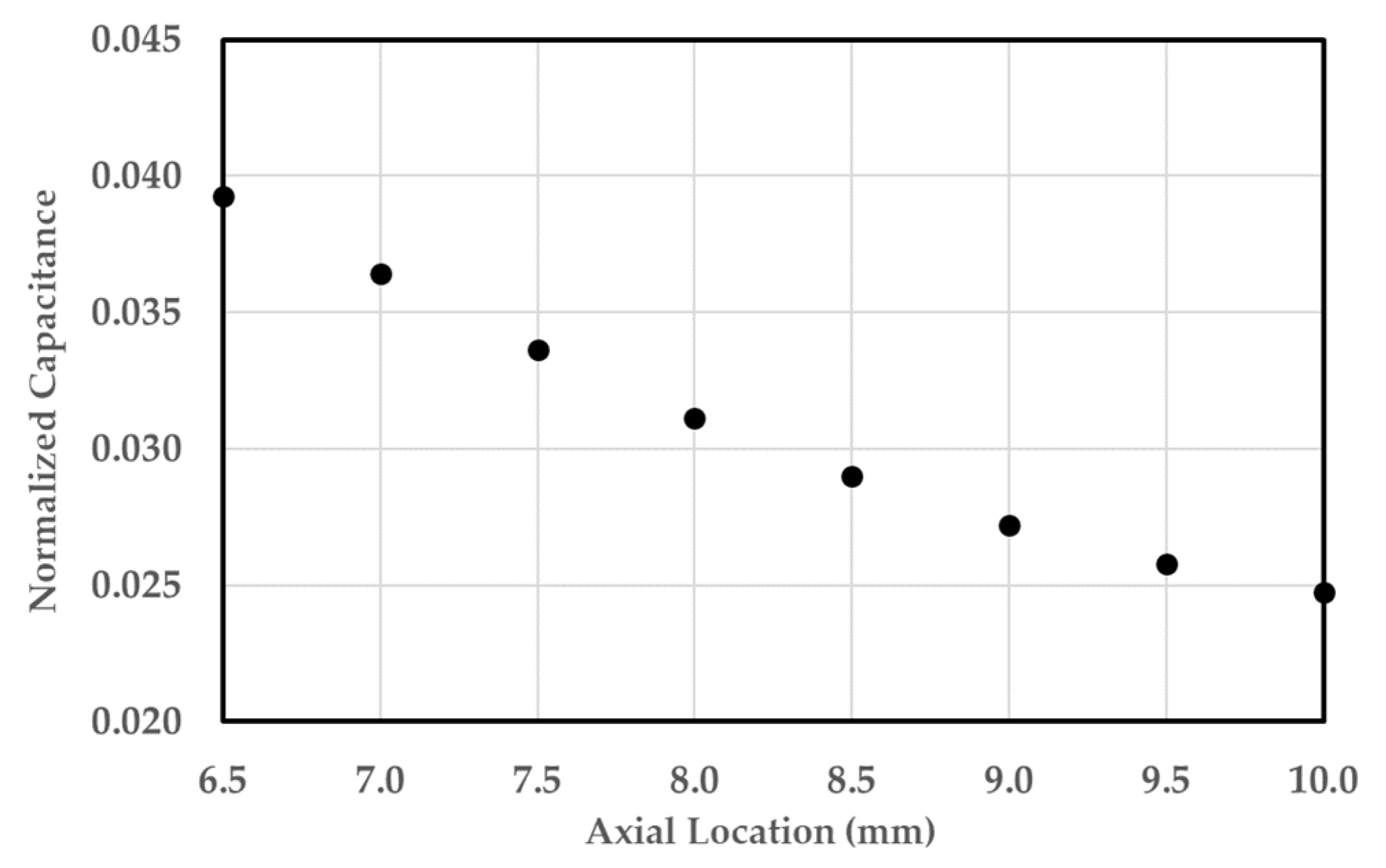
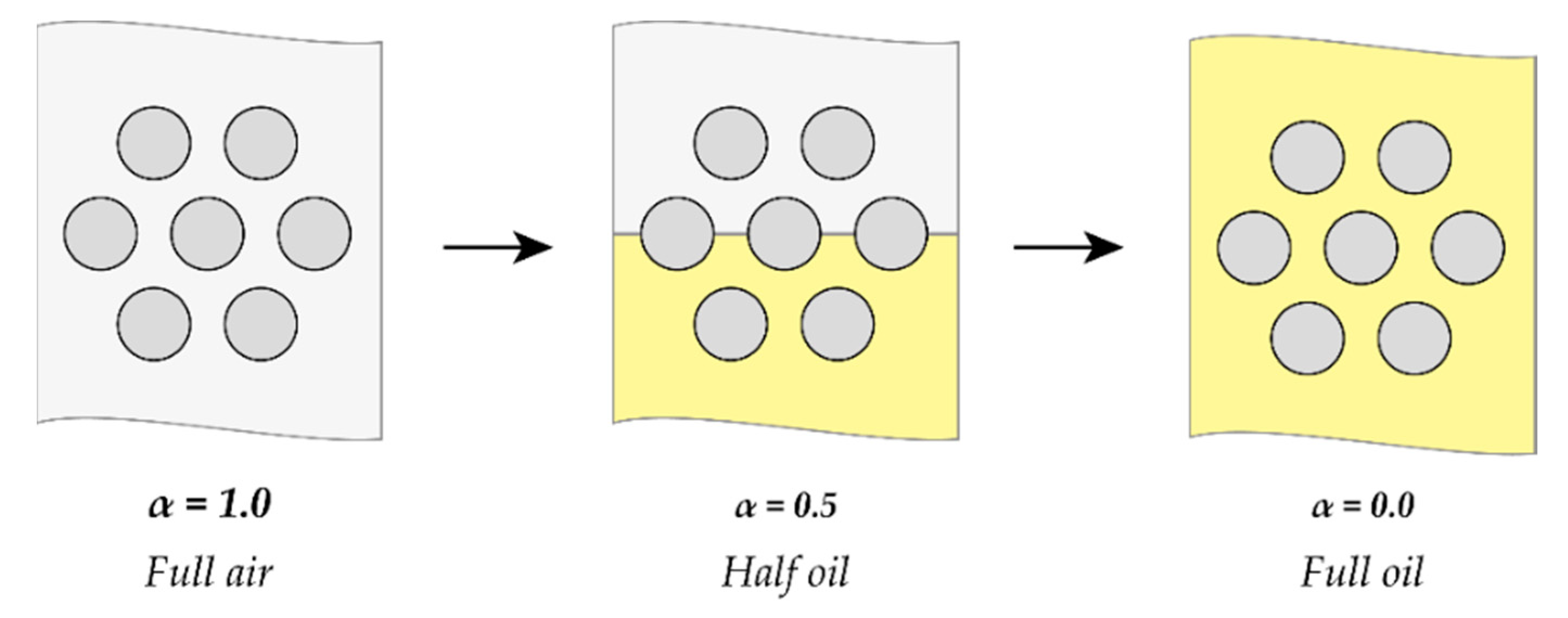
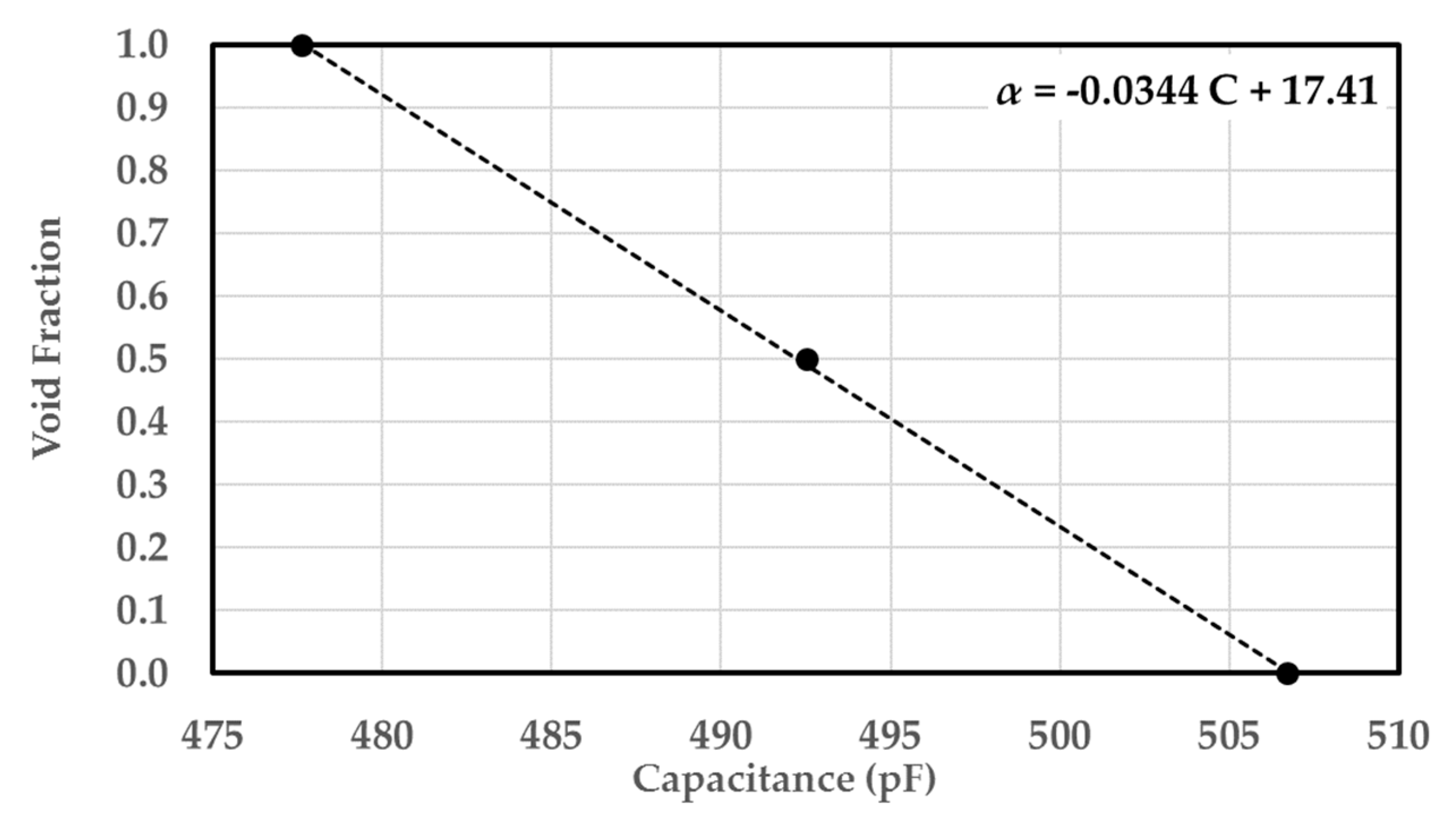
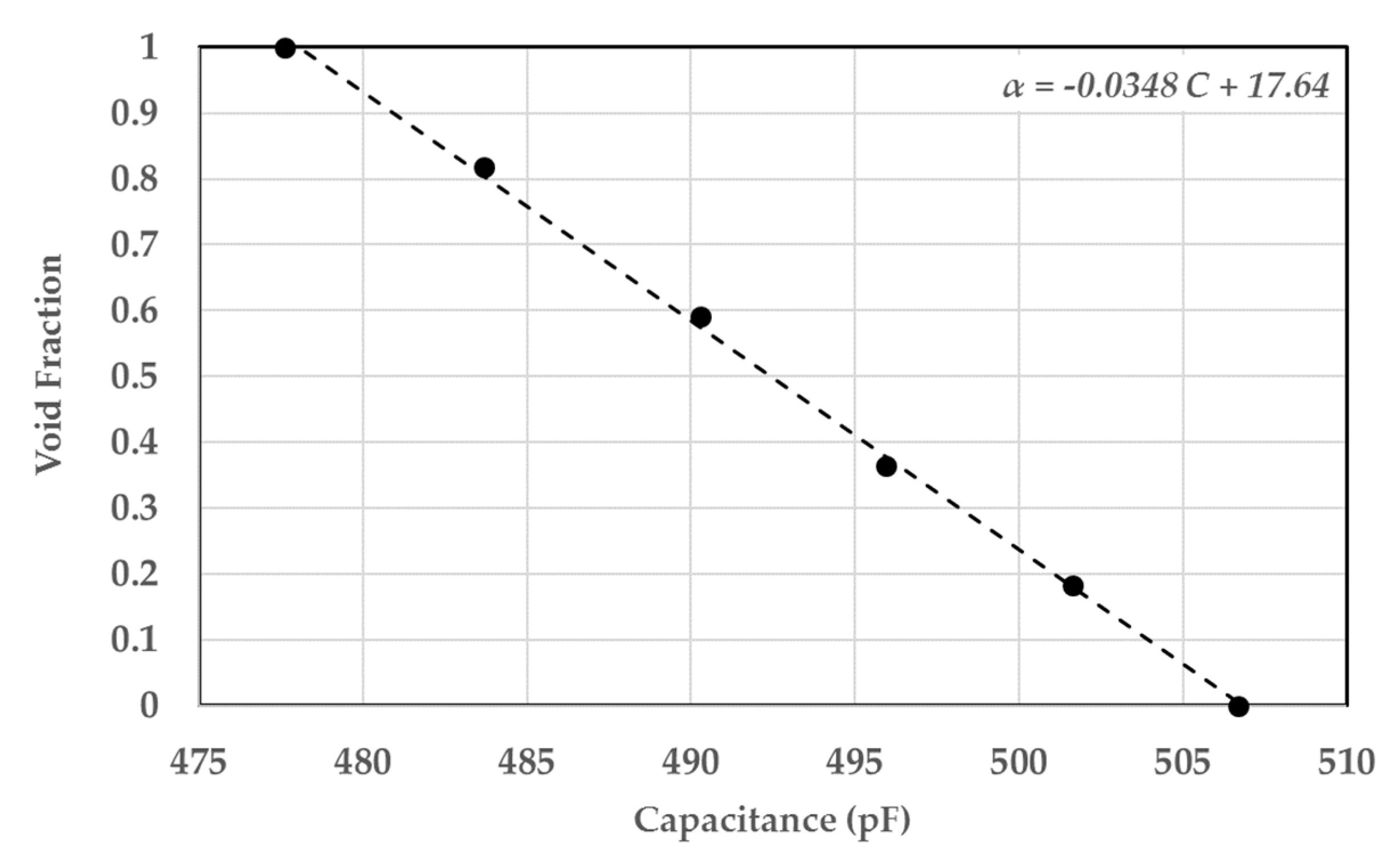
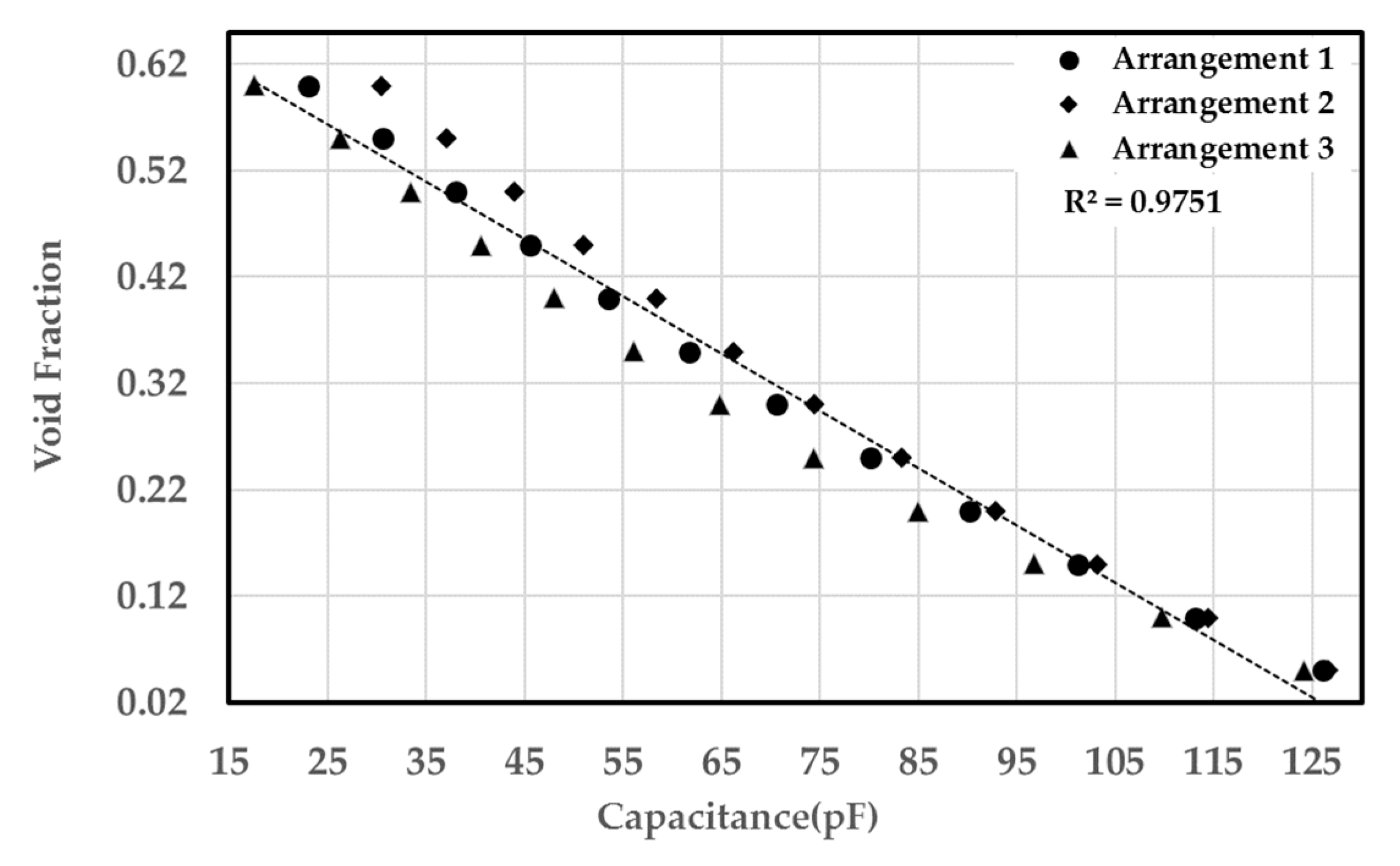
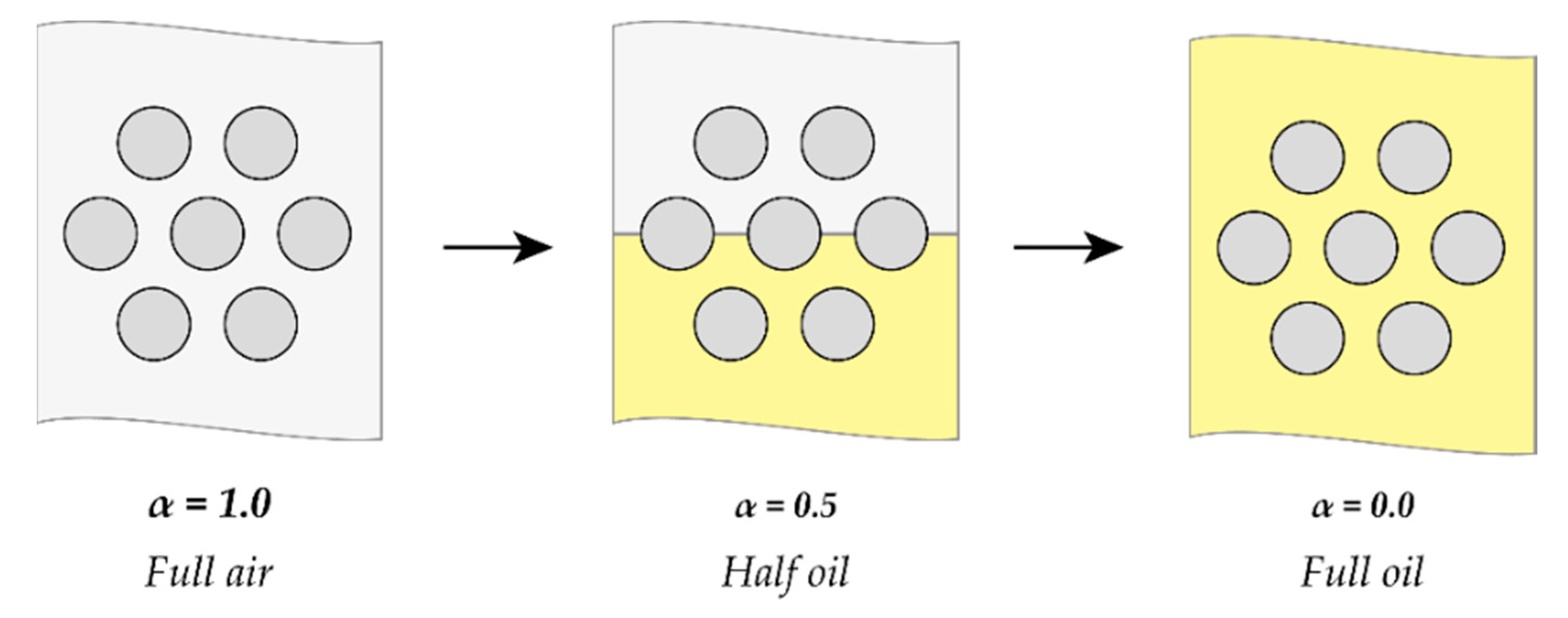
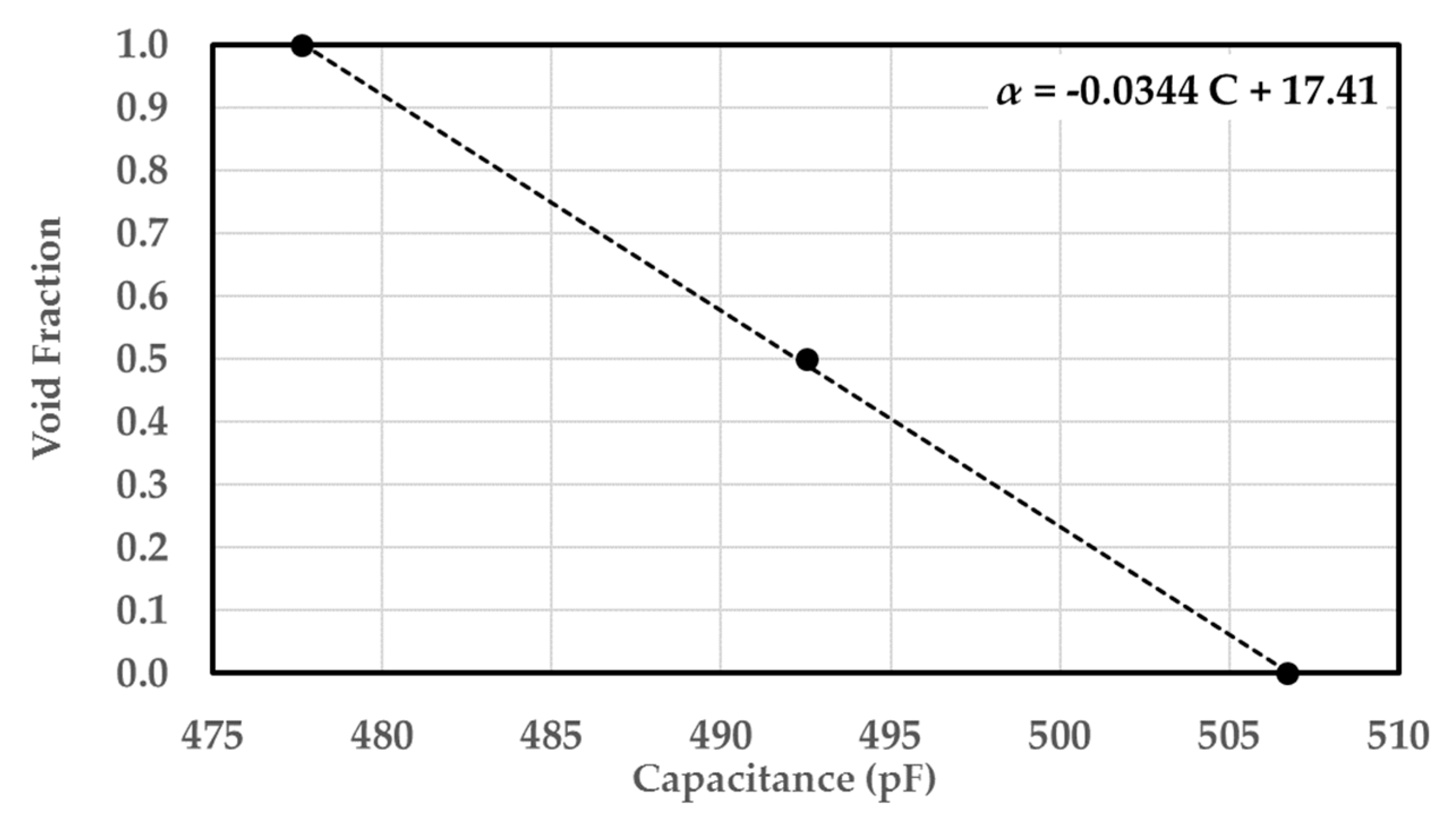
The sensor calibration is performed by taking two capacitance measurements: one at a 0% void fraction and another at a 100% void fraction. Those two points are then used to calculate the total percentage of the void fraction from the dynamic capacitance signal.
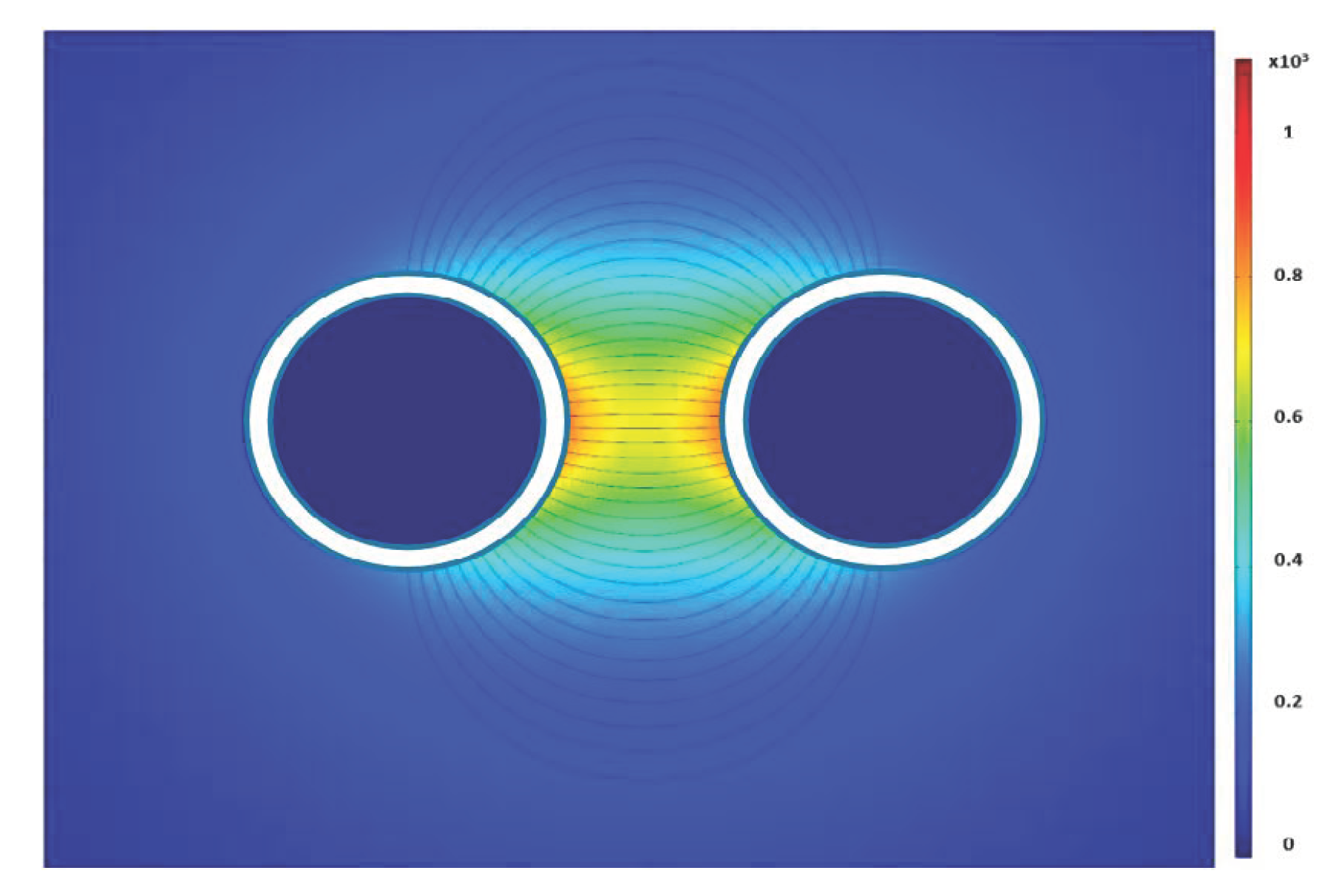
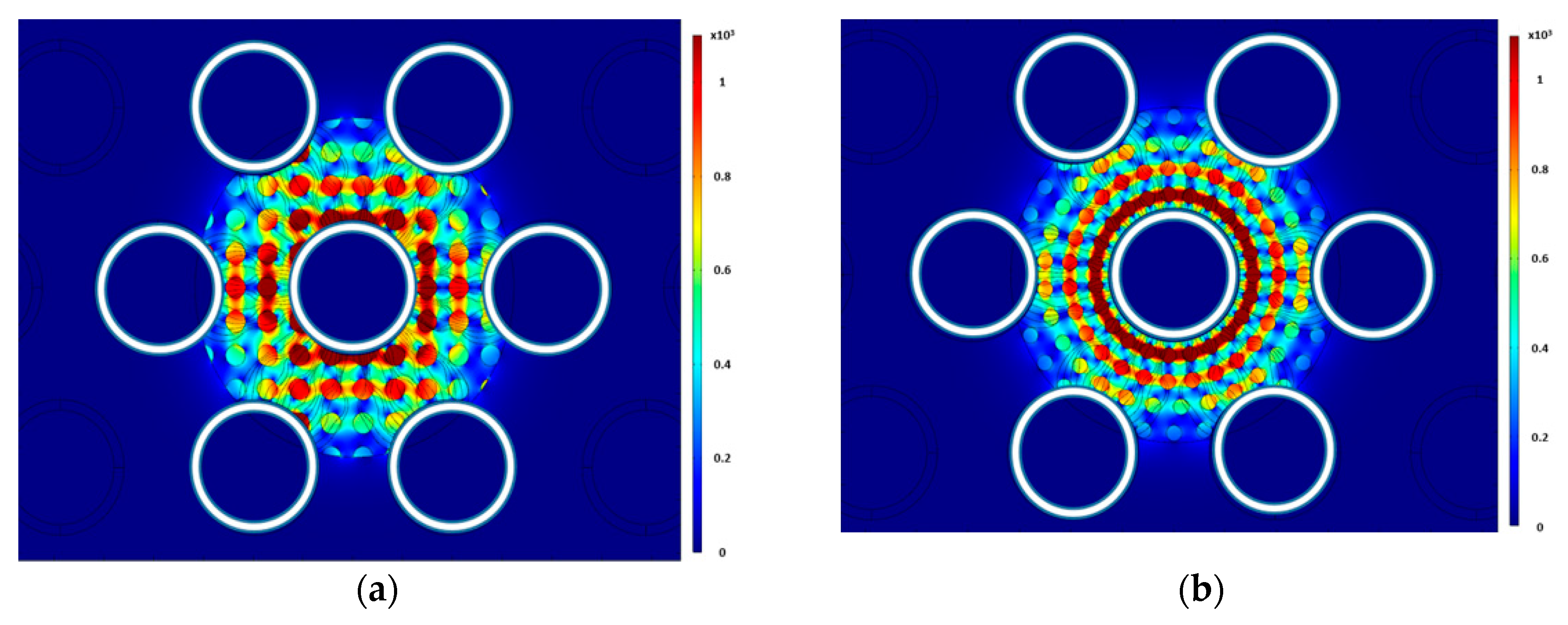
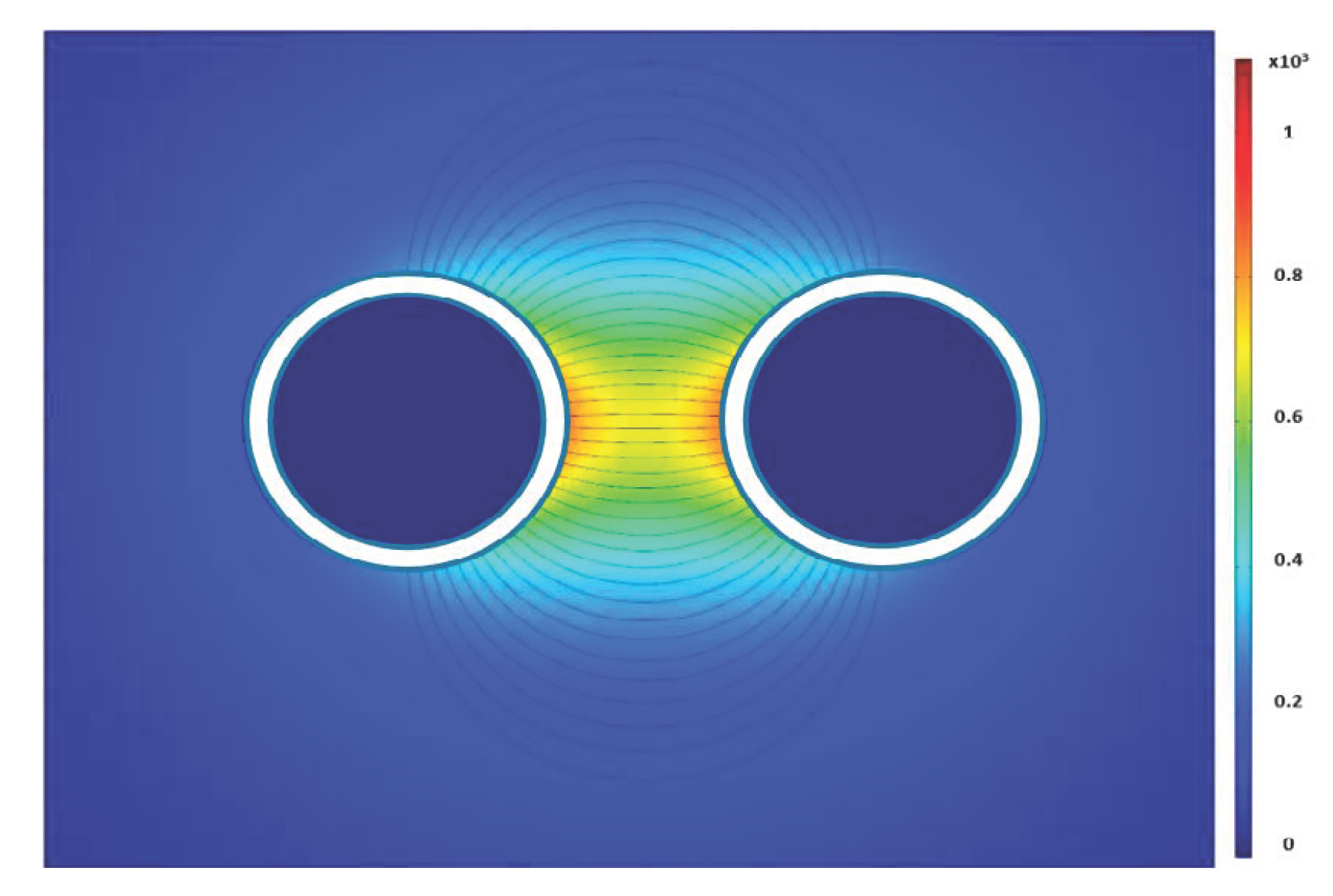
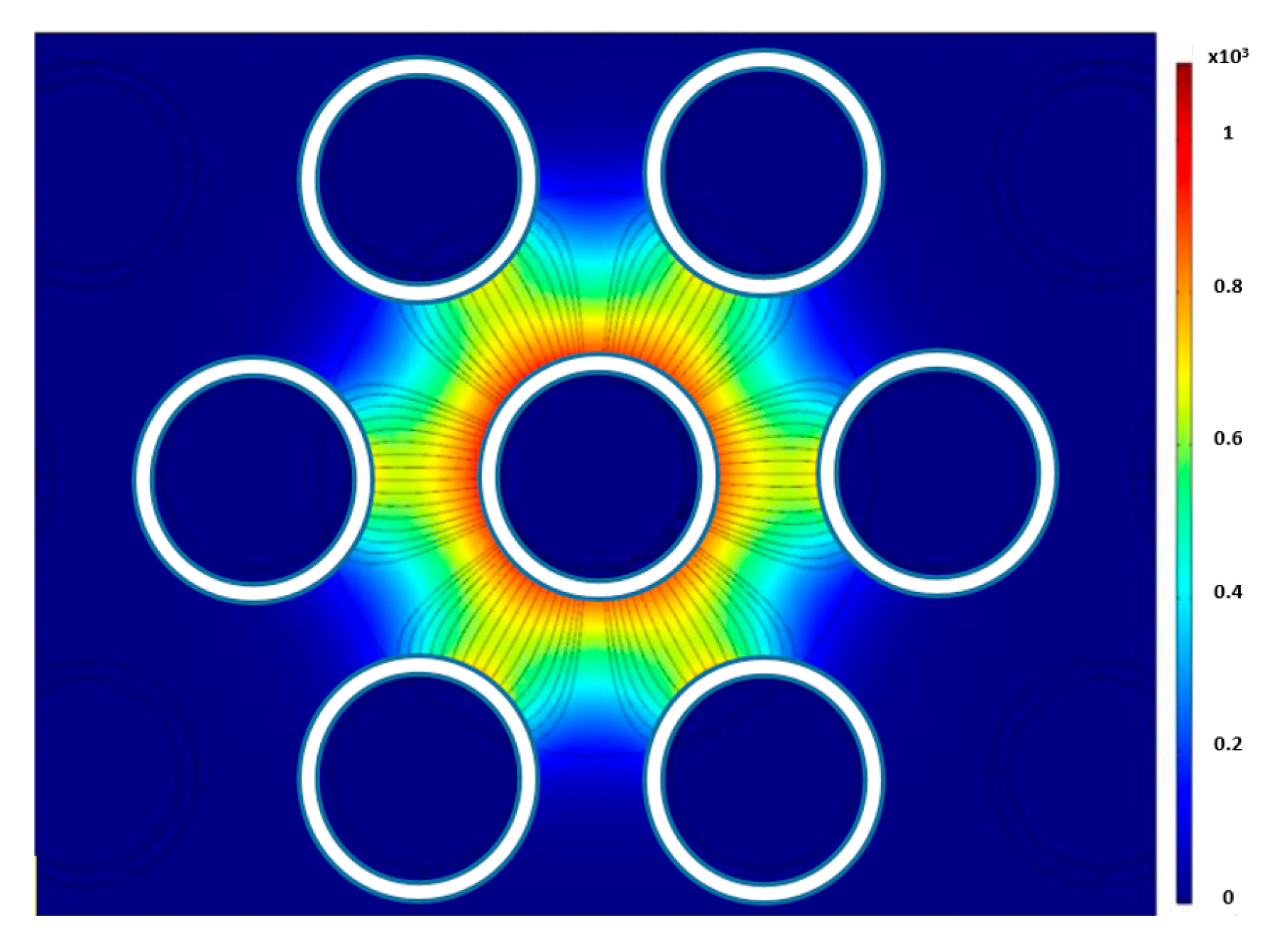
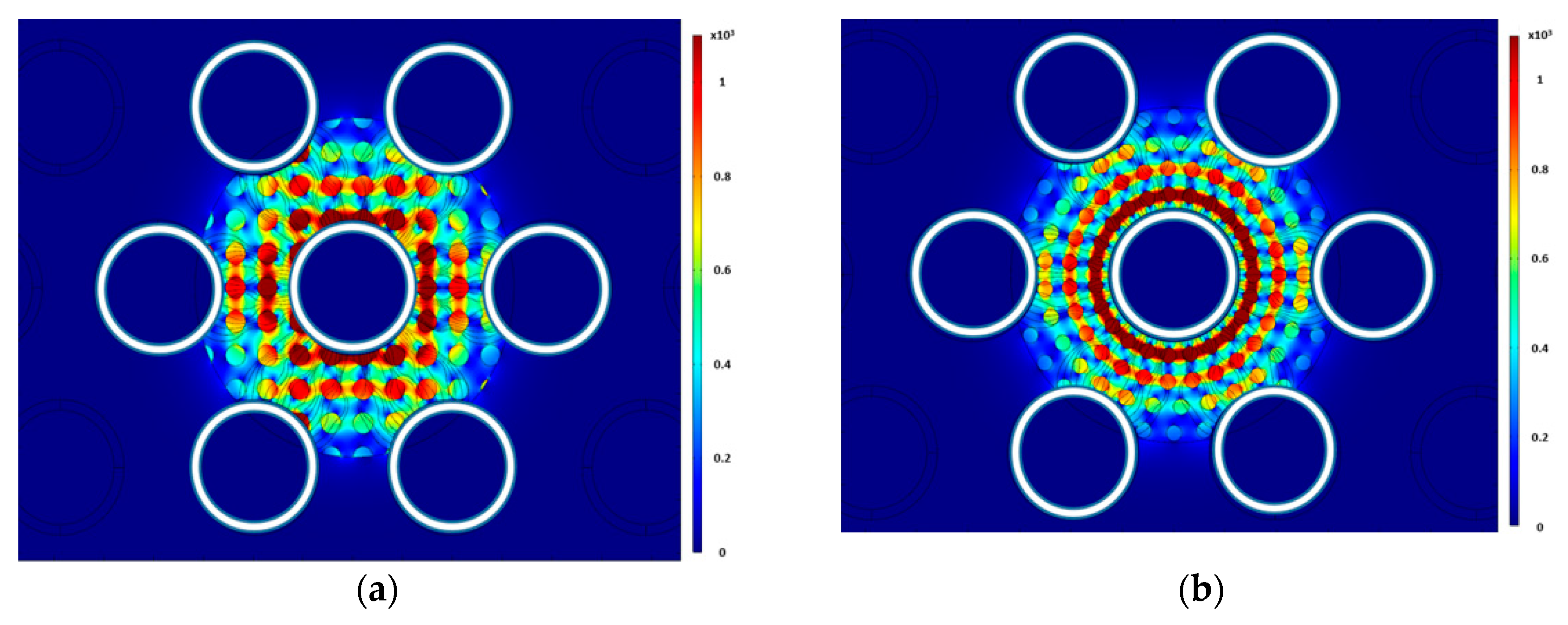
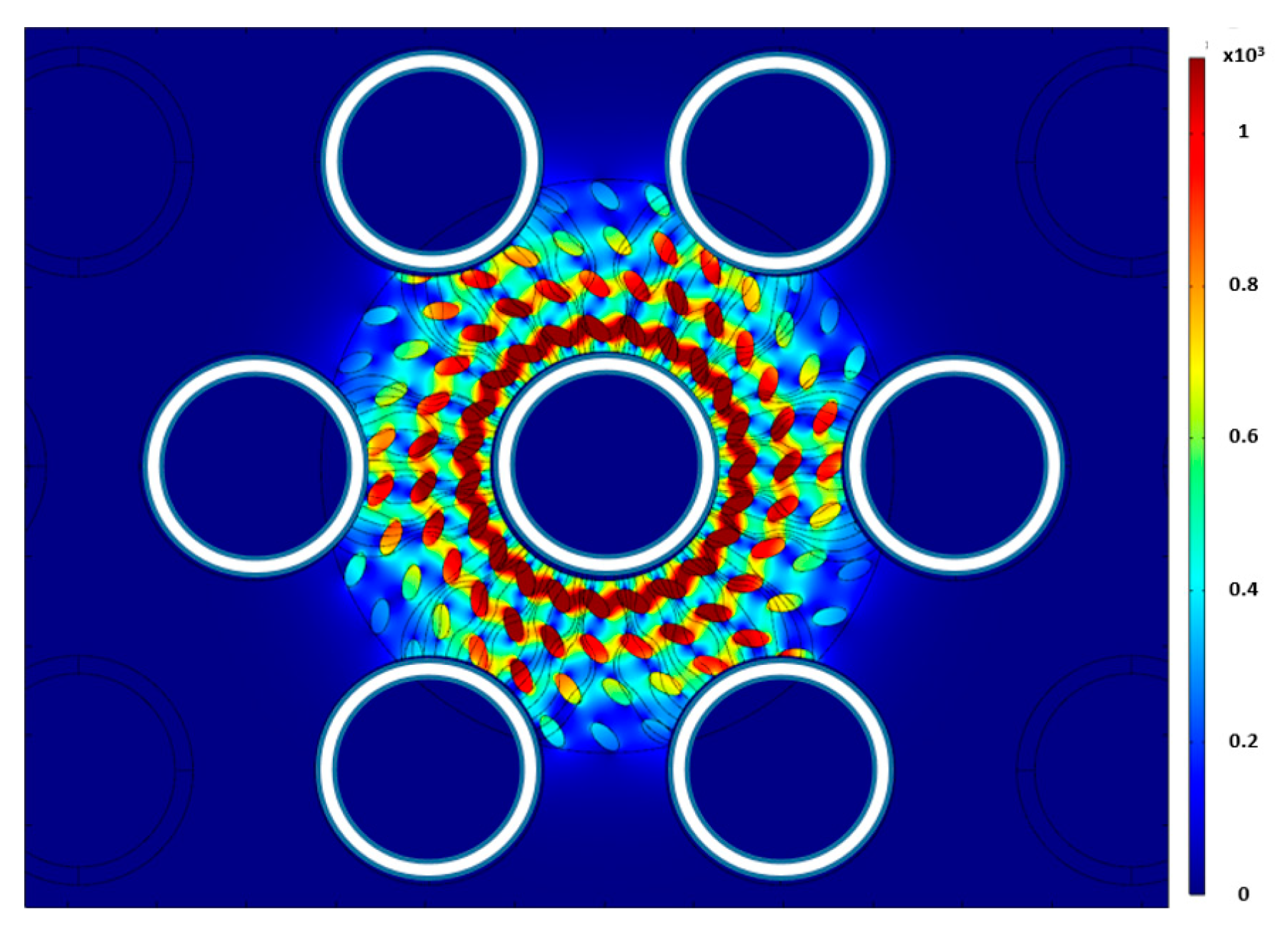
Two different electrode configurations were used: a single-sensor configuration and a three-sensor configuration. In the single-sensor configuration shown in
Figure 2, the center electrode is connected to one terminal of the meter circuit while the other six outer electrodes are connected to the second terminal; therefore, this arrangement has six capacitances between the outer electrodes and the center one.
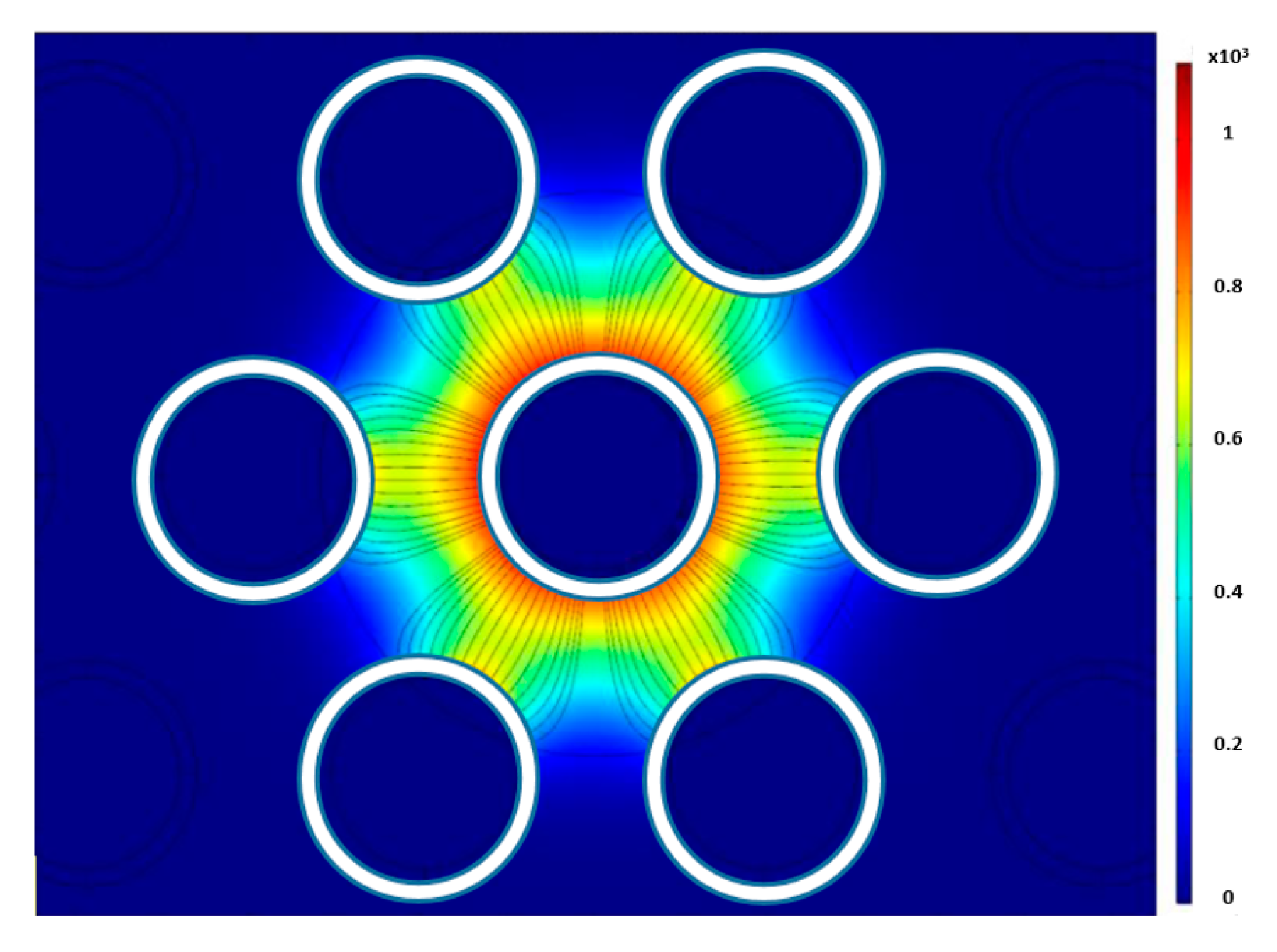
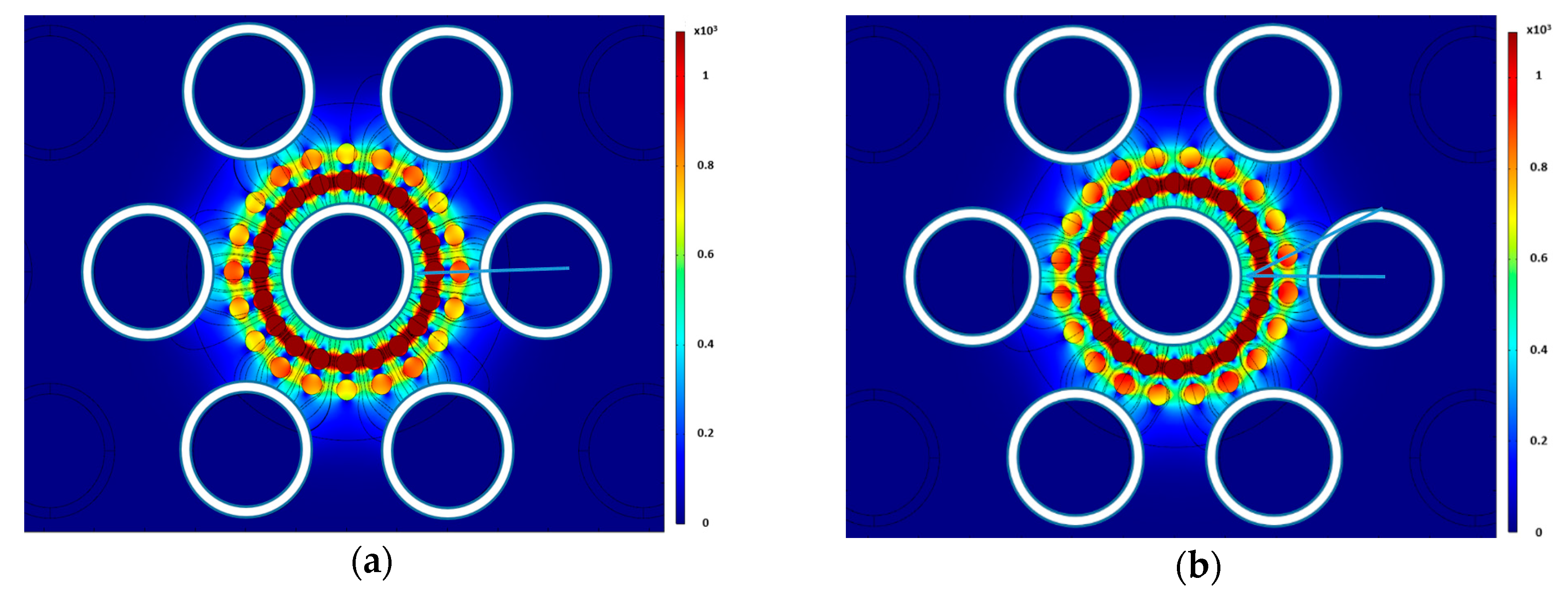
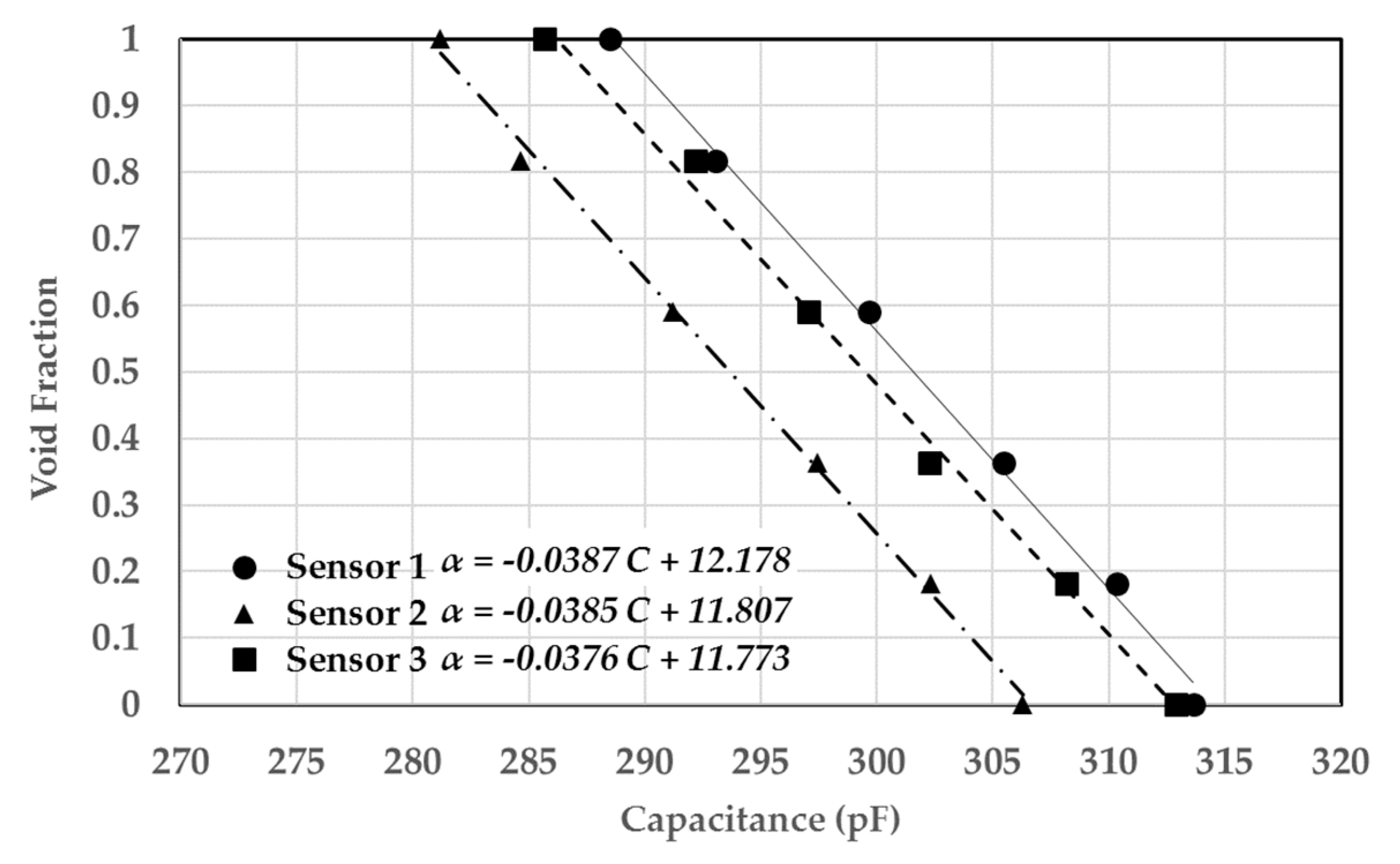
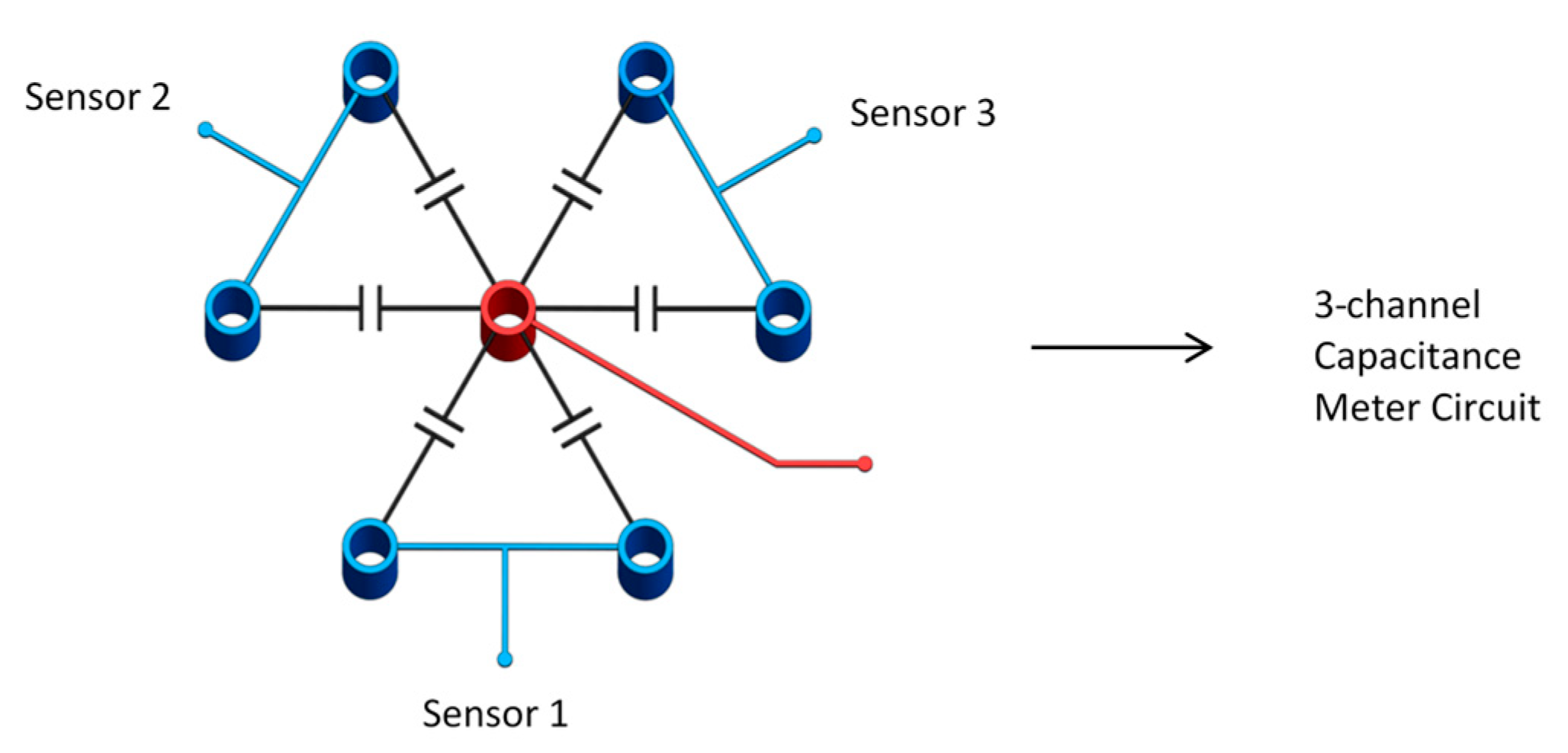
In the three-sensor configuration shown in
Figure 3, each sensor consists of two outer adjacent electrodes connected together to form two capacitances with the center electrode. The meter circuit used for this configuration has three input channels to measure the three sensors.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}