In this Section, trajectory reconstruction results from both simulated and real measurement data are presented. The configuration for the extended RTS smoother is first introduced in
Section 4.1. The simulated measurements are used to theoretically validate the purposed method in
Section 4.2. Results based on real measurements are presented in
Section 4.3. The jump length obtained from both the proposed method and video recordings are compared in
Section 4.4 to further validate the results based on real measurement data.
4.1. Setting
We first introduce necessary configurations for the extended RTS smoother algorithm. For the initial states
, the GPS measurement at initial time
is adopted as an estimation for the initial position and velocity as
and
. The estimated value for initial attitude
is calculated via the factored quaternion algorithm proposed in [
23] using the accelerometer and magnetometer measurements at time
. The initial guess for all measurement error parameters is chosen to be zero as
. For the augmented initial states
, the estimated covariance matrix for the initial states error
is set as shown in
Table 3. In addition, the covariance matrix of noises
and
is considered constant and the estimated values of
and
are listed in
Table 4 and
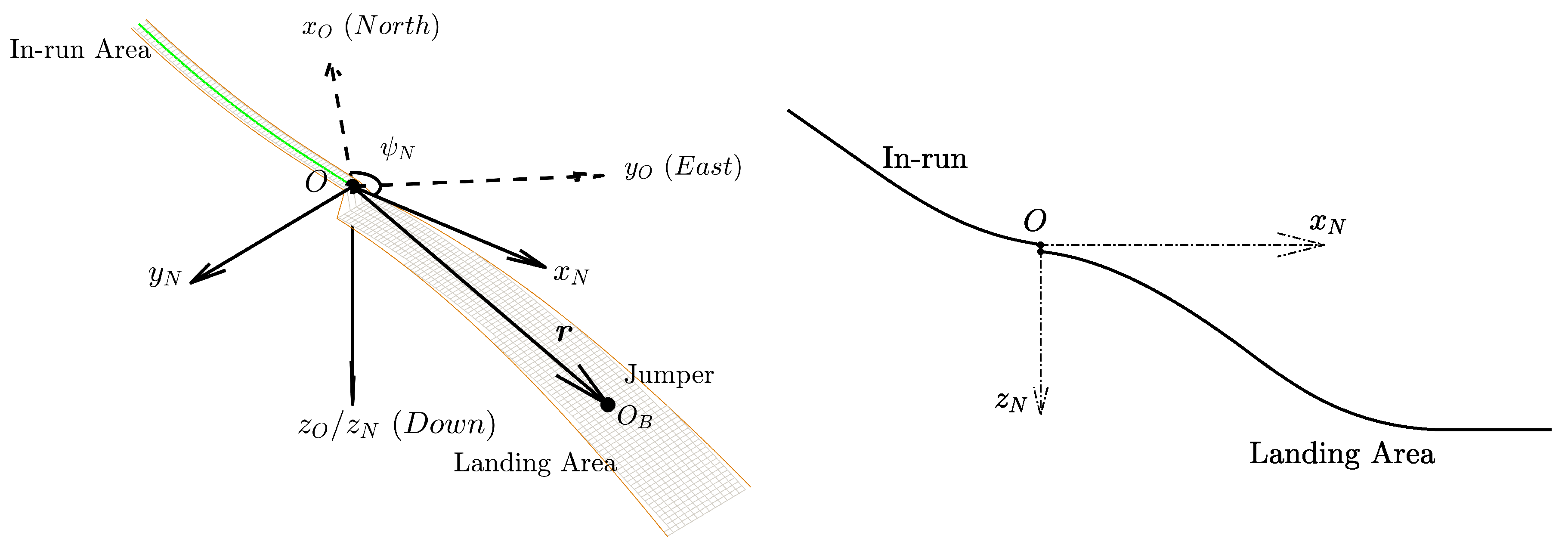
Table 5 respectively. Within the model, the hill azimuth angle
is set as 312.6° for the jumping hill Schattenbergschanze. The gravitational constant at the site is calculated to be
according to the Earth Gravitational Model 1996 [
19].
4.2. Validation by Simulated Measurement Data
To validate the accuracy of the proposed algorithm, an artificial measurement data set is generated by assuming a true value and adding sensor error and noise. This data set is generated based on the result from real measurements as a reference trajectory, ensuring similar observability of the estimation problem as in the real world. Trajectory optimization techniques with least-squares costs are used to obtain a trajectory with similar acceleration and angular velocities as the measured data. By adding path constraints to the trajectory optimization, the true trajectory also fulfills the constraints in Equations (
32)–(
34). The true value for the generated trajectory also complies with the kinematic models in Equations (
44)–(46). The sensor errors and noises are added to the true values according to Equations (
35)–(
39), with the noise covariance values shown in
Table 4 and
Table 5 to generate artificial measurements.
The trajectory is reconstructed with only the noisy artificial measurements known to the extended RTS smoother. The reconstruction result is presented in
Figure 5. Here, it can be observed that the smoothed trajectory agrees closely with the true reference. To quantify the error of the estimated position and velocity, we calculated the error by
where variables with subscript “ref” are the true values from the generated data. The error of these estimated positions and velocities are presented in
Figure 6a,b respectively. To intuitively display the attitude, the quaternions
are converted to the corresponding Euler angles (in z-y-x order): the bank angle
, the pitch angle
, and the azimuth angle
by
Then, we use the error in Euler angles to represent the attitude estimation error as
The Euler angle estimation error is presented in
Figure 6c. The root-mean-square (RMS) error for position, velocities, and Euler angles are summarized in
Table 6. This result shows that the proposed algorithm can successfully reconstruct the trajectory and that the position accuracy for the assumed noise covariance is in decimeter magnitudes.
4.3. Validation by Real Measurement Data
Now, we apply the extended RTS smoother on real measurement data to the ski jumping trajectory reconstruction problem. The results for a reconstructed ski jump are presented in the following part.
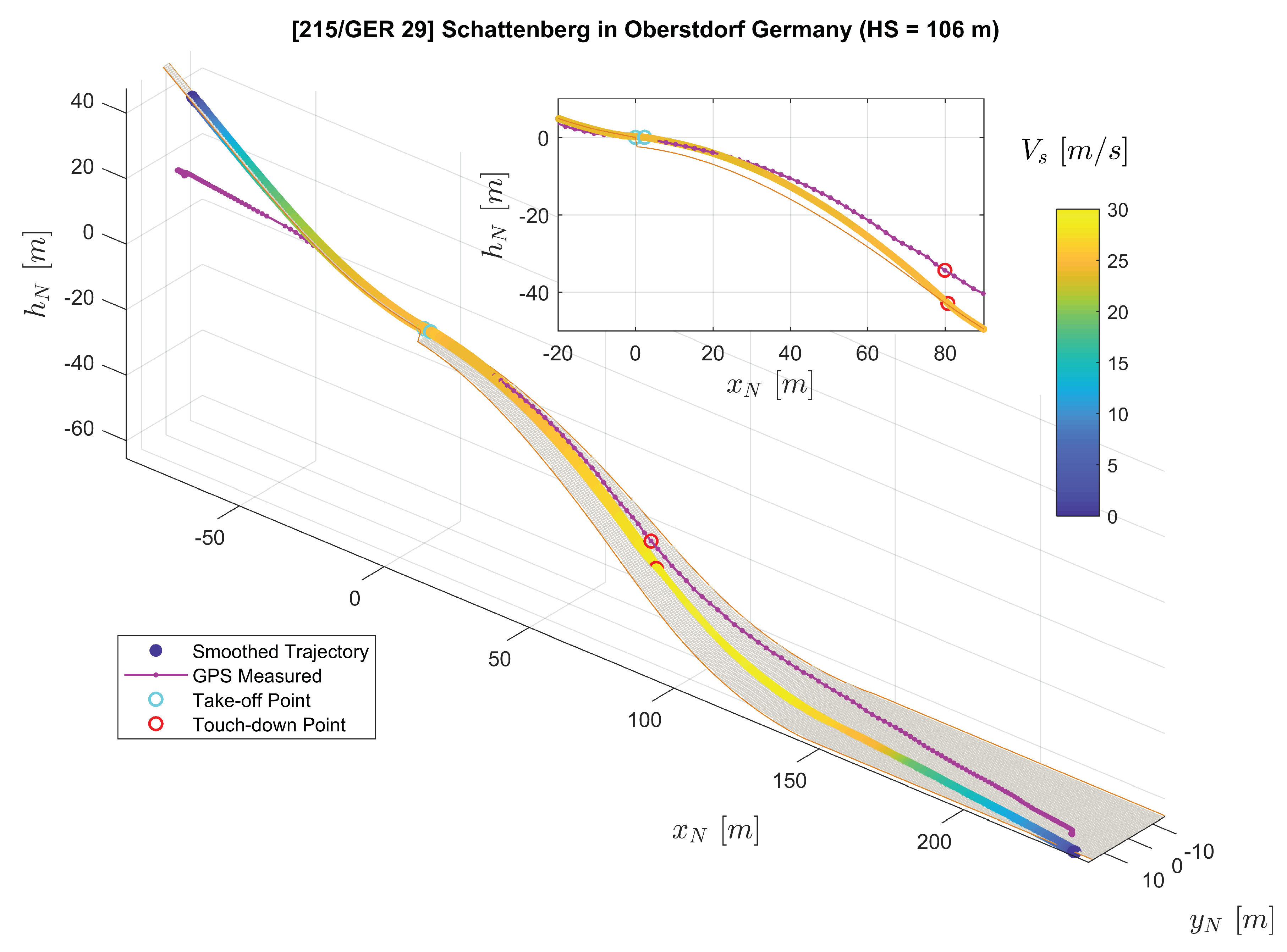
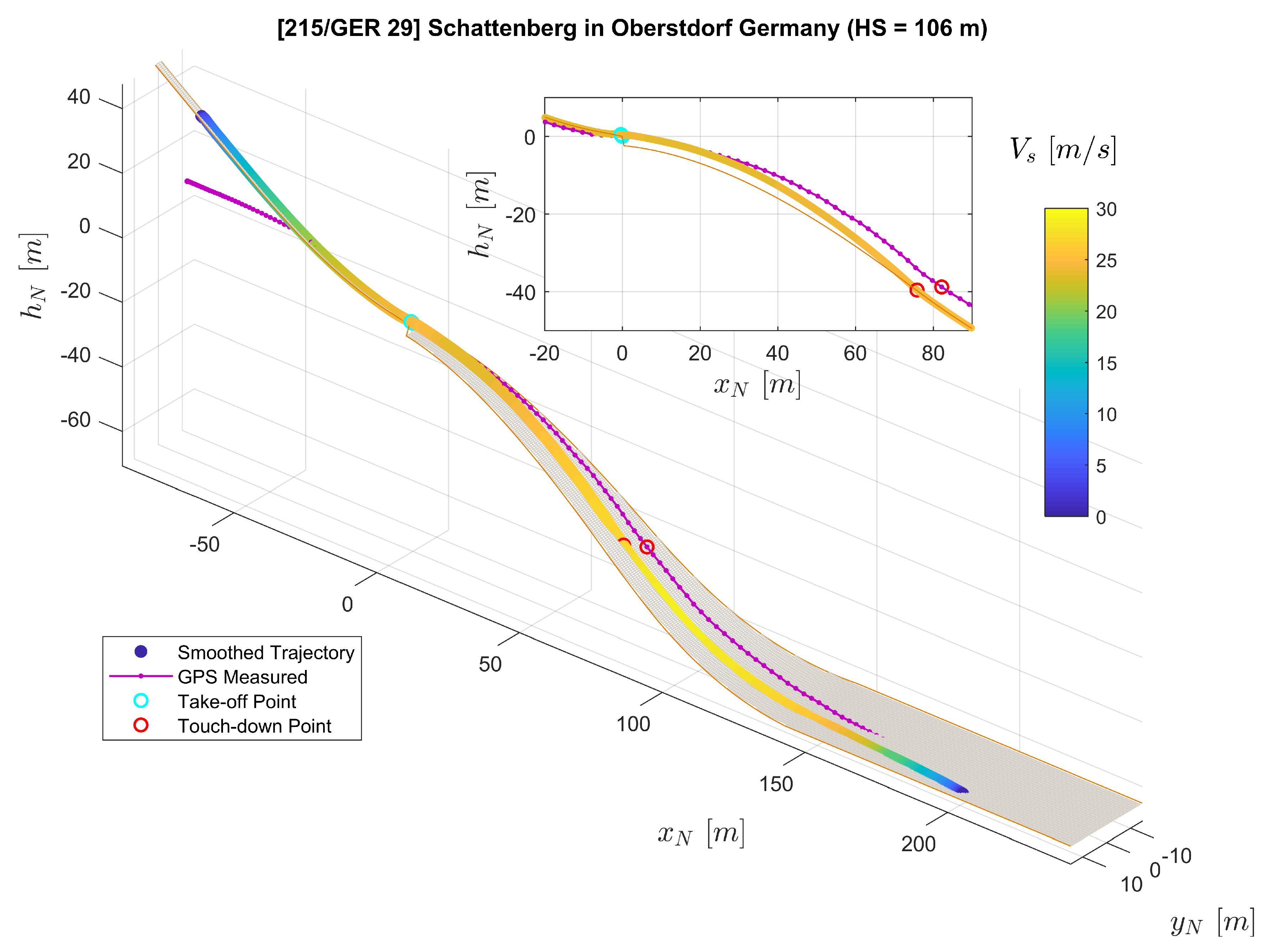
In
Figure 7, the three-dimensional trajectories of the jumper are plotted with a digital ski jumping hill model based on [
20,
21]. The purple solid line with dots shows the converted raw GPS position measurements
where each dot on the line represents a measurement sample. Furthermore, the line consisting of color-coded dots represents position reconstructed by the extended RTS smoother, where the color of one dot represent the velocity
. Note that we use the relative local height
here instead of
in the figure for convenience. The relationship between
and
is directly
. The subplot on the top-right corner of
Figure 7 presents the projection of the jumping trajectories on the
-
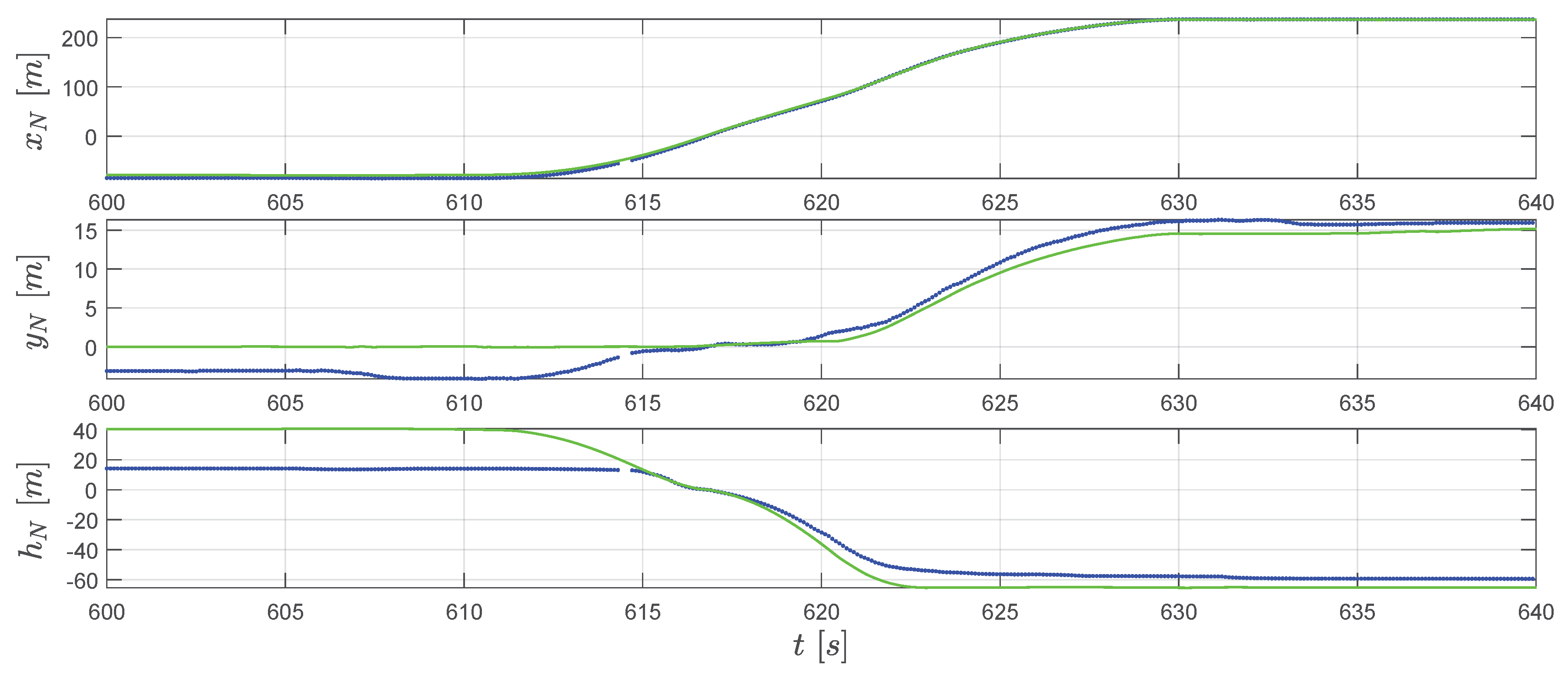
plane (focusing mainly on the flight part). The comparison between GPS-measured and extended RTS smoother reconstructed position as well as velocity time histories is presented in
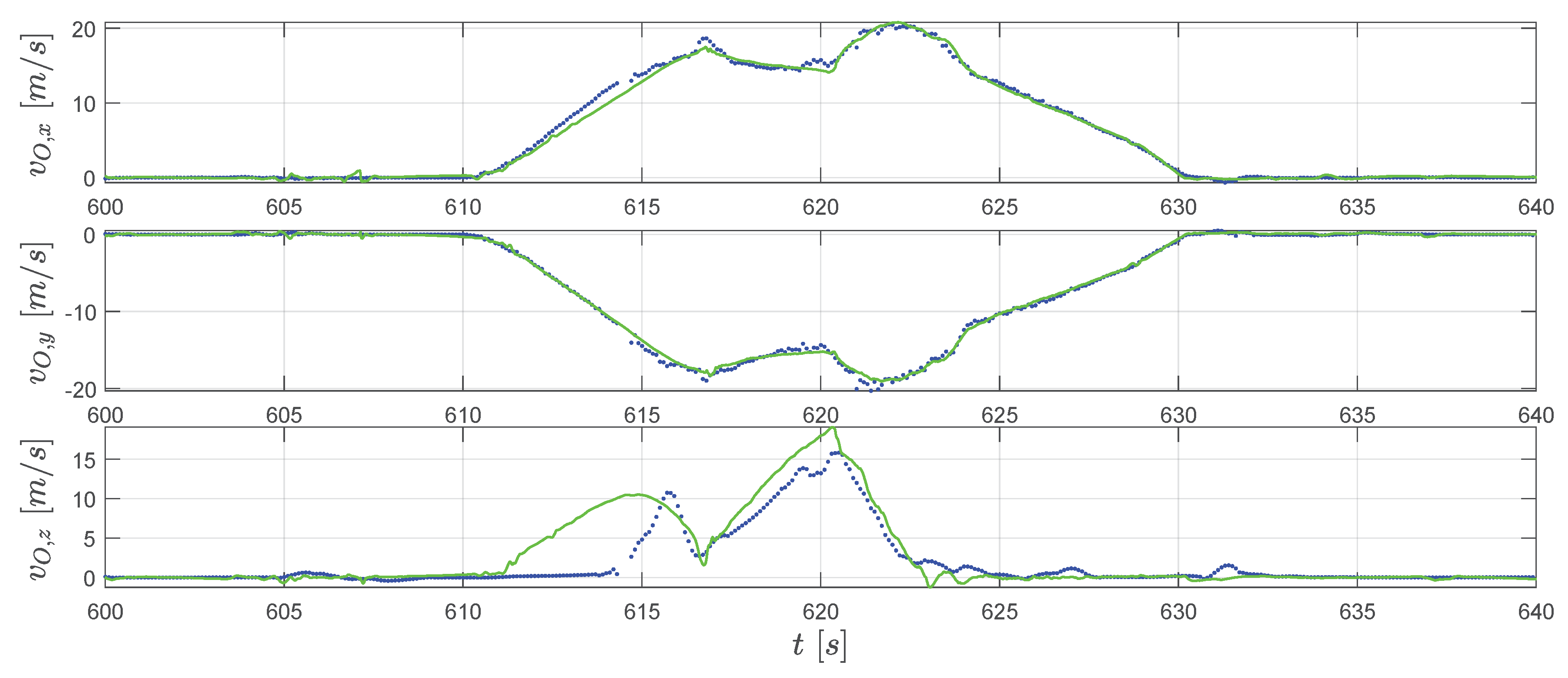
Figure 8 and
Figure 9 respectively.
Both GPS measurements and the smoother estimation in
Figure 7 show the trajectory of an entire jump from start to stop. By comparing the GPS-measured trajectory to the jumping hill model for the in-run and out-run parts, it shows that the GPS height channel contains relatively large errors. After the jumper starts his run along the track during the in-run phase, the GPS-measured trajectory indicates that the jumper starts to move horizontally, but remains at the same height vertically. For part after the touch-down in the landing area, the GPS-measured trajectory shows large error leading to the position being above the ground. Therefore, in this case, the GPS-measured trajectory is not adequate for the demand for analyzing the ski jump limited to its accuracy. It is worth mentioning that the GPS measured trajectory does not necessarily encounter the same type of error in the height channel as in our case. Nevertheless, due to the trilateration positioning principle of the GPS technology employed, the GPS height measurement is far less accurate than the latitude and longitude measurements. The GPS service standard [
24] reported that the GPS has a global average positioning accuracy of
horizontal error and
vertical error.
On the other hand, besides the GPS measurements as a data source, the extended RTS smoother uses IMU and magnetic measurements as well as geometric information of the jumping hill to perform data fusion. The application of the RTS smoother reconstructs the trajectory despite a lower GPS measurement frequency and the existence of some GPS height errors as shown in
Figure 7,
Figure 8 and
Figure 9. In
Figure 7, the reconstructed trajectory shows the entire process of the jump. The jumper first slides down along the in-run track with increasing speed
. For the flight part, this can be clearly observed from both the three-dimensional plot and the subplot in
Figure 7. It can be observed that the height above the ground is decreasing until the jumper’s touch-down with the speed further increasing. After the touch-down, the jumper skis down on the landing area of the hill with his speed still accelerating. After reaching the flat part at the hill bottom, the jumper decelerates due to the friction and his break action and then comes to a full stop. In comparison to the GPS measurement, the estimated position and velocity are improved especially in the height channel, which reveals more information for the jump analysis, and the sampling frequency on the trajectory is also increased.
In
Figure 8, we can observe that two lines fit well for
. For
in the extended RTS smoother result (the green line), the constraint
correct the position
to 0 before take-off. Afterward, the reconstructed trajectory matches the GPS measurements with some differences. For the
channel, as also mentioned before, the raw GPS measurement has a relatively large error which can be clearly observed in
Figure 7. The smoother reconstructed height by considering the vertical constraints
and
is moving in the in-run curve before the take-off and on the surface of the landing area after the touch down (see
Figure 7). The height history is closer to a real physical movement. In
Figure 9, for horizontal velocity
and
, the reconstruction and measurement fit accurately. The extended RTS smoother result gives a bit different estimation of
compared to the GPS measured one. Considering the fact that after the jumper starts gliding down around
s, the vertical velocity afterward should be positive (moving downwards). So, the vertical speed measured by GPS also contains an error for the in-run part which is associated with the height error. Since the extended RTS smoother considers kinetics
, the smoother estimated vertical speed is linked to the height estimation. Combining the result in
Figure 7 and
Figure 8 for the in-run part (around
s to
s), the positive
estimates the smoother giving out is more close to the fact that jumper is moving vertically down in the in-run. This indicates that the extended RTS smoother improves the velocity comparing to the GPS with the assistance of information from other sources.
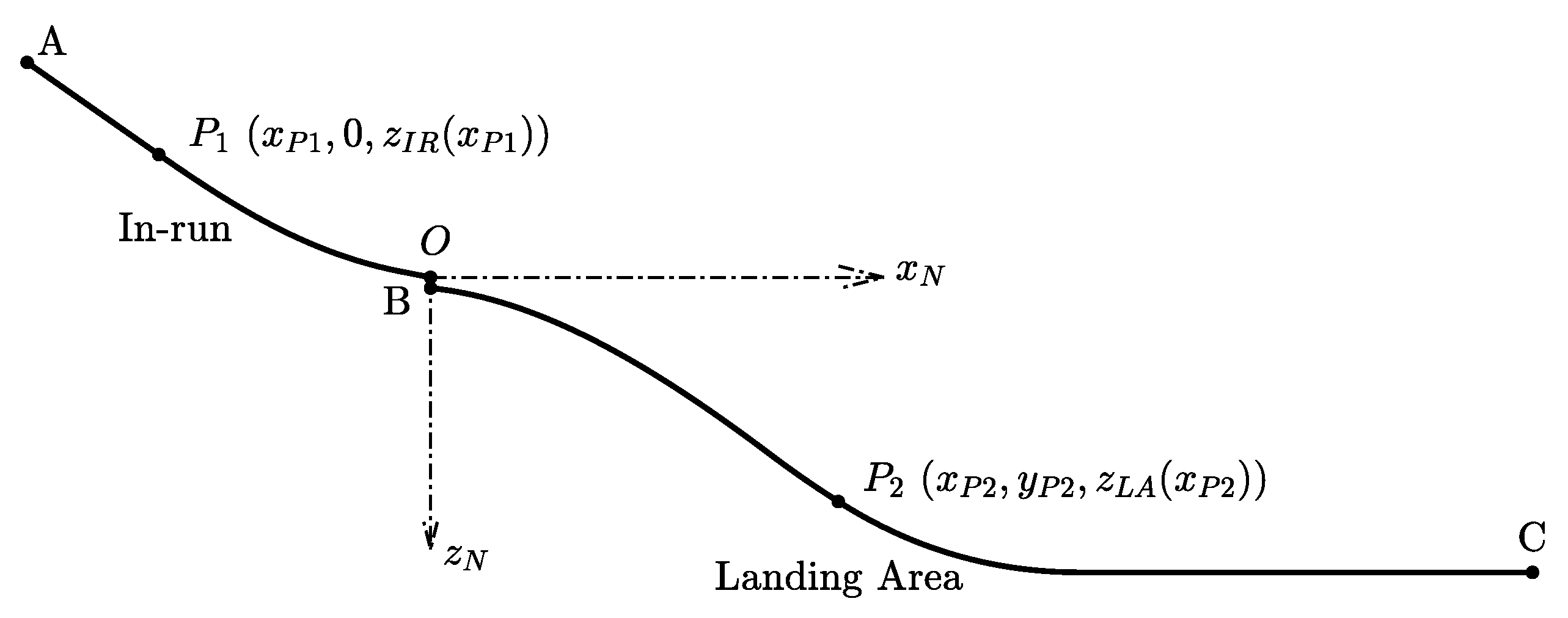
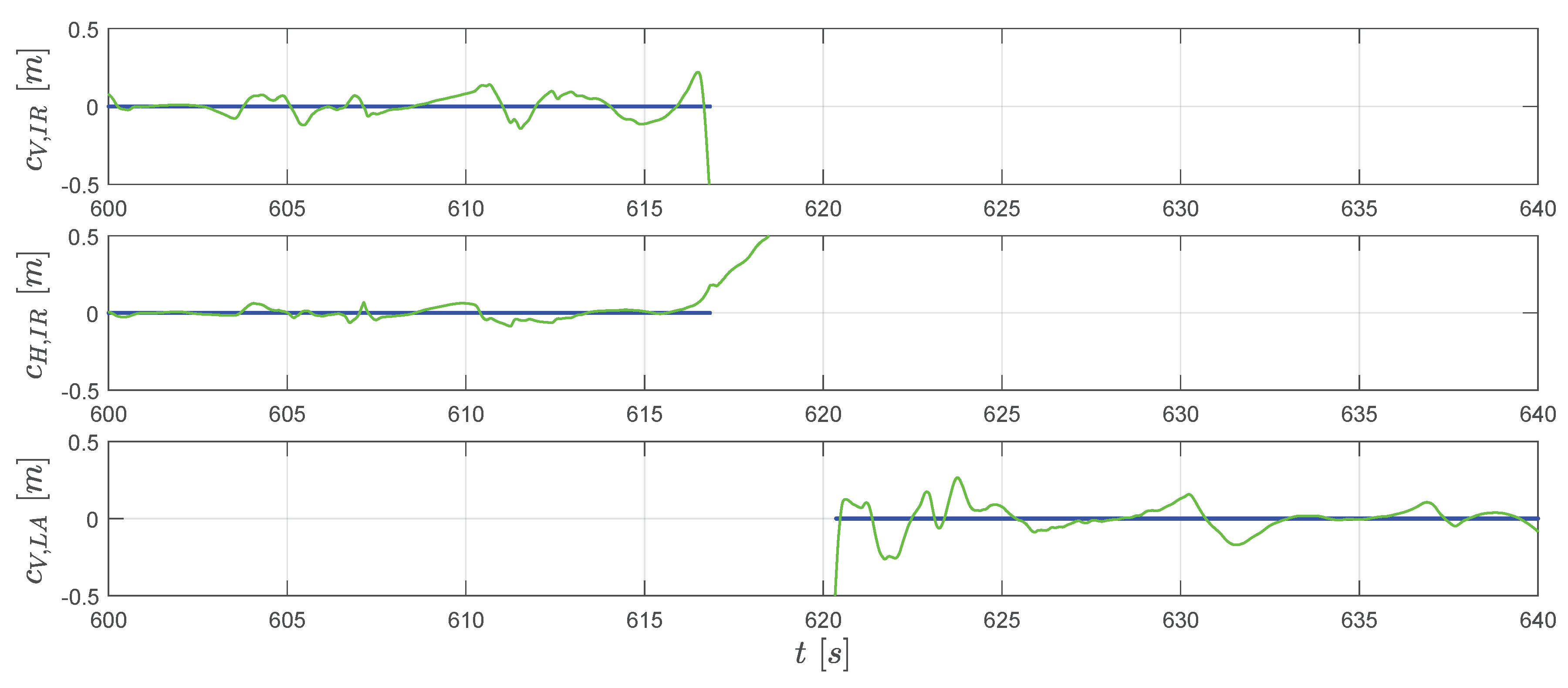
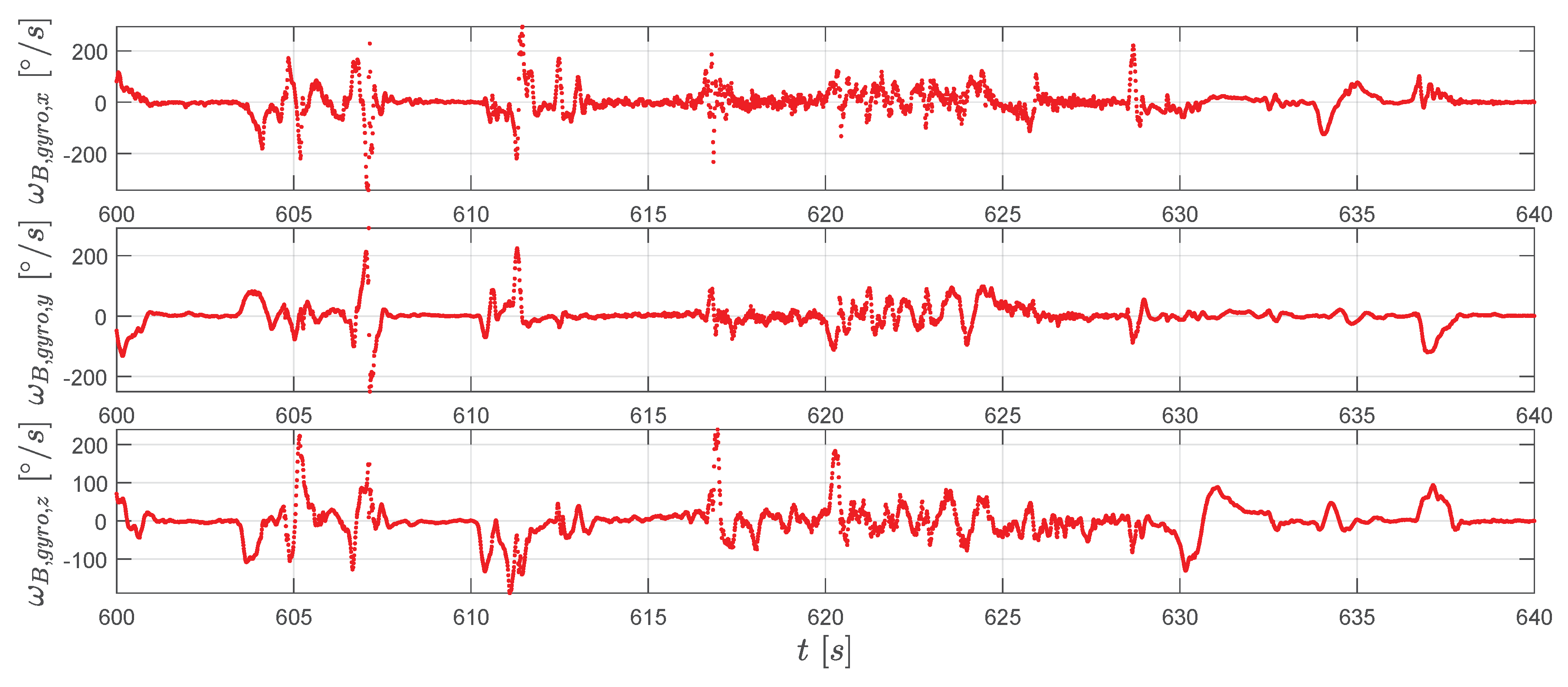
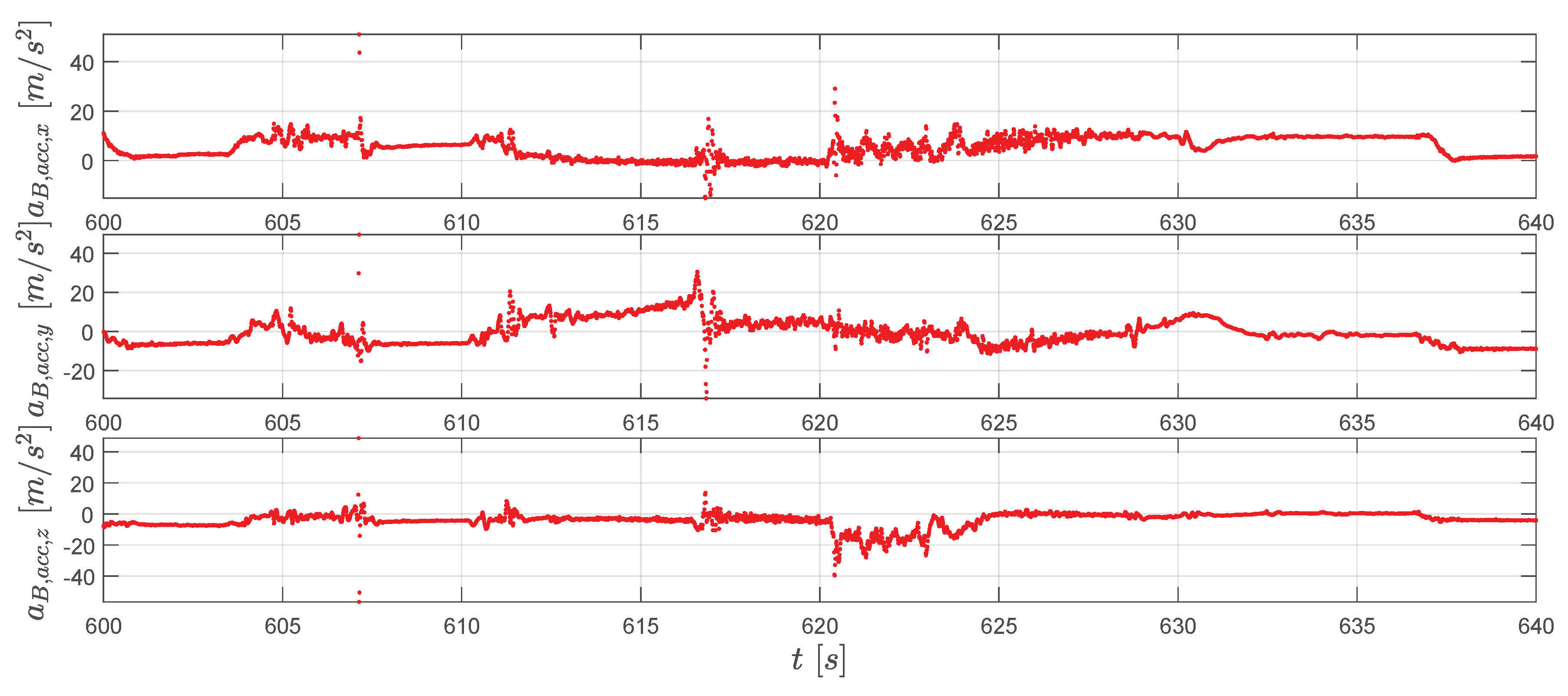
The improvement of the estimation accuracy is achieved by fusing data from different sources including measurement sensors, kinematics, and geometric information of the hill. The gyroscope and accelerometer data, after removing the estimated bias error, are used for propagating the states including attitude, velocity, and position together with a priori knowledge of the uncertainties. The GPS measurements and the magnetometer are included as additional data sources for the correction step. Furthermore, the introduction of the geometric constraints from the jumping hill model provides an additional information source, which contributes to the estimation. The constraints
and
, as shown in
Figure 10, establish a strong relationship between states
and
on the vertically plane for each part of the trajectory (before take-off and after touchdown).
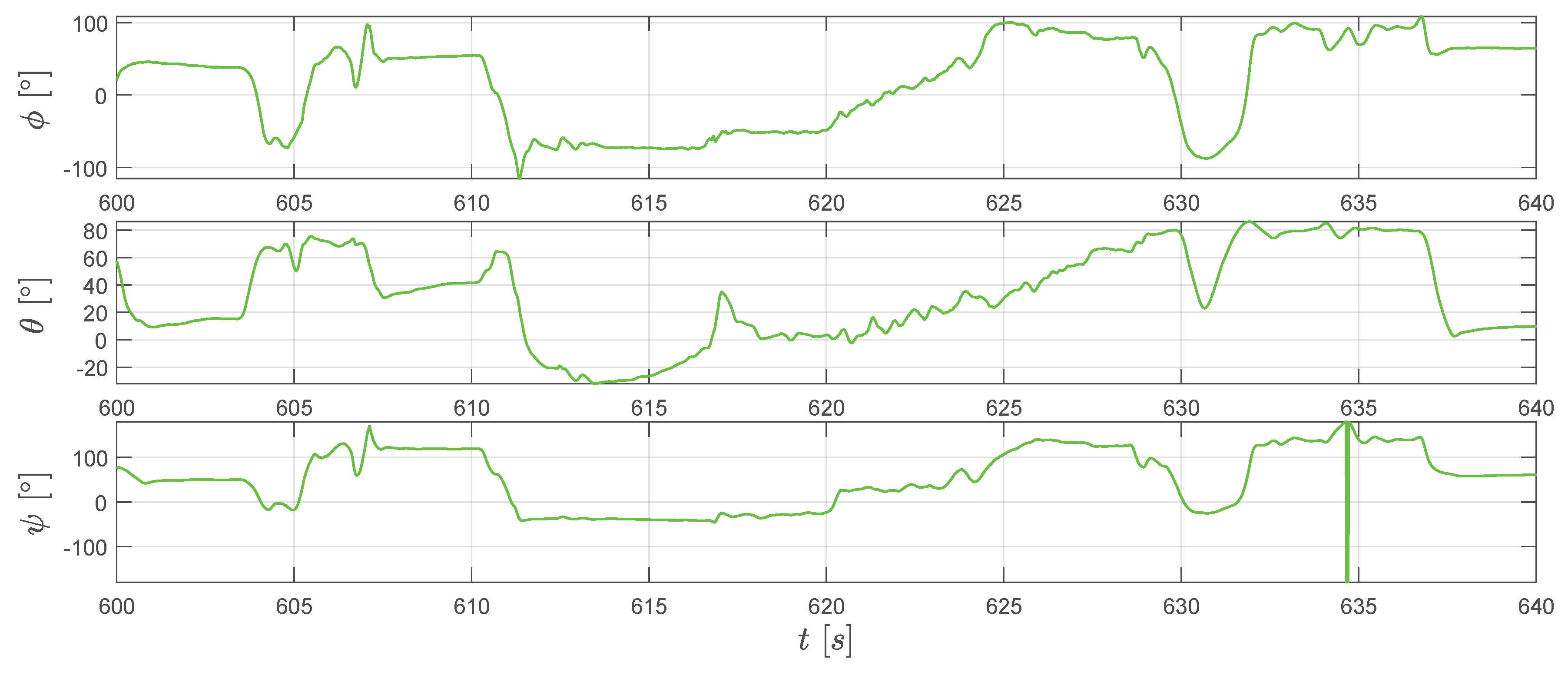
Although the major aim of applying the extended RTS smoother is to obtain a better position and velocity estimation, it is worth to mention that the RTS smoother also provides an attitude estimation of the IMU sensor. Furthermore, the estimation of the IMU attitude is essential to attribute the accelerometer measured specific forces into the correct direction (see Equations (
45) and (
49) ). By applying Equations (
54)–(56), the converted Euler angles reconstructed by the extended RTS smoother are shown in
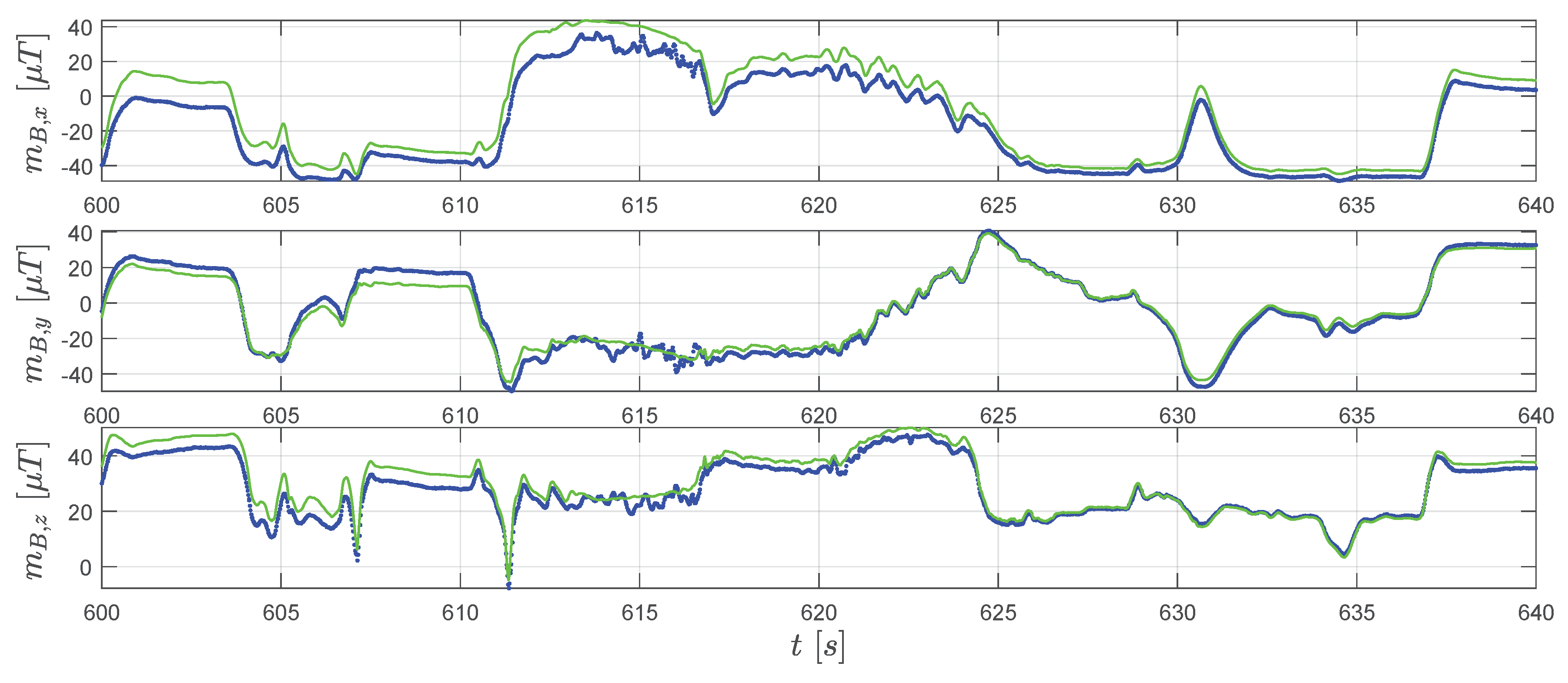
Figure 11. From Equation (
37), we know that the magnetic field measurements change with the attitude. Therefore, the similar tendency of extended RTS smoother estimated
and magnetometer measurements
in
Figure 12 indicates good attitude estimation.
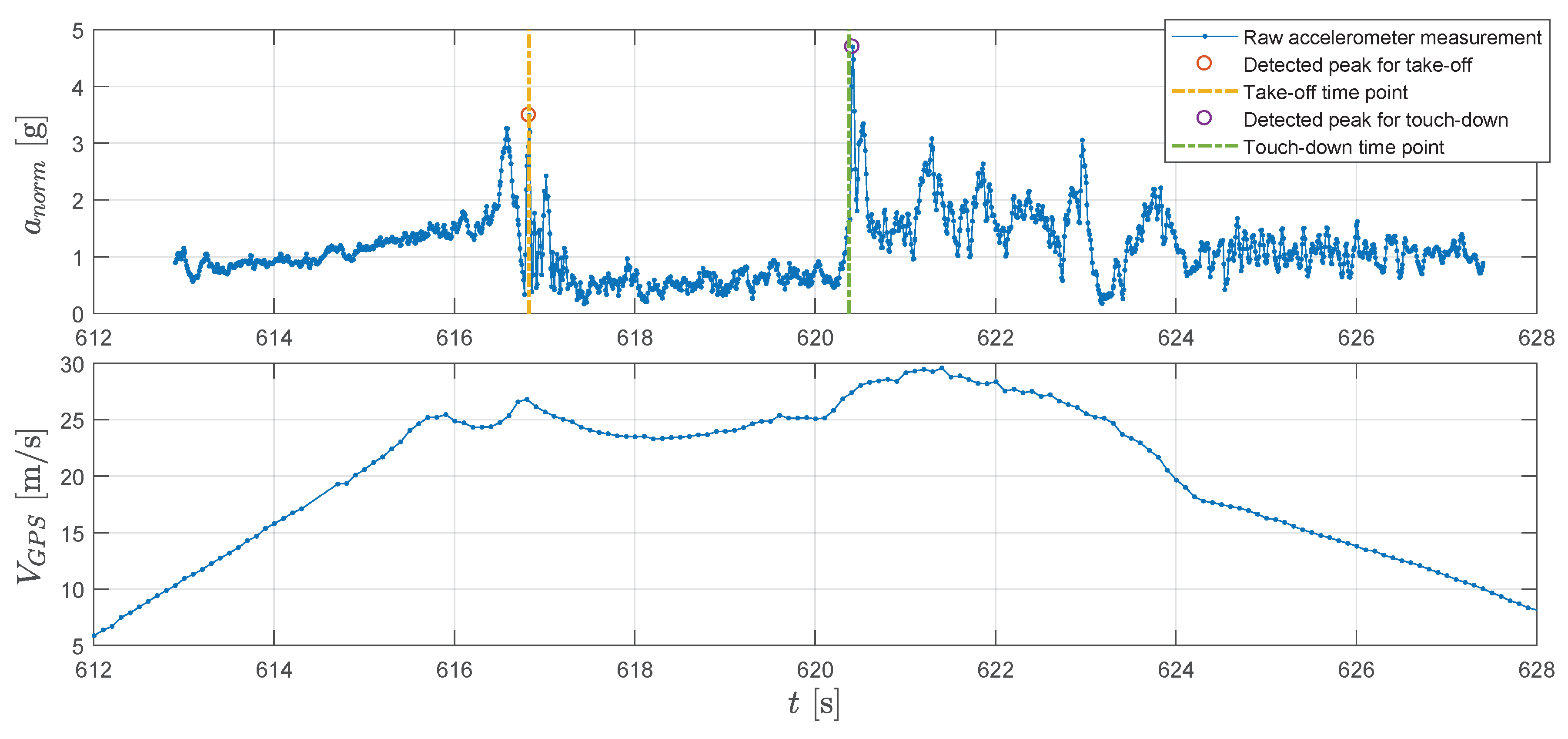
To conclude the result presentation, measurements from the gyroscope and the accelerometer are shown in
Figure 13 and
Figure 14.
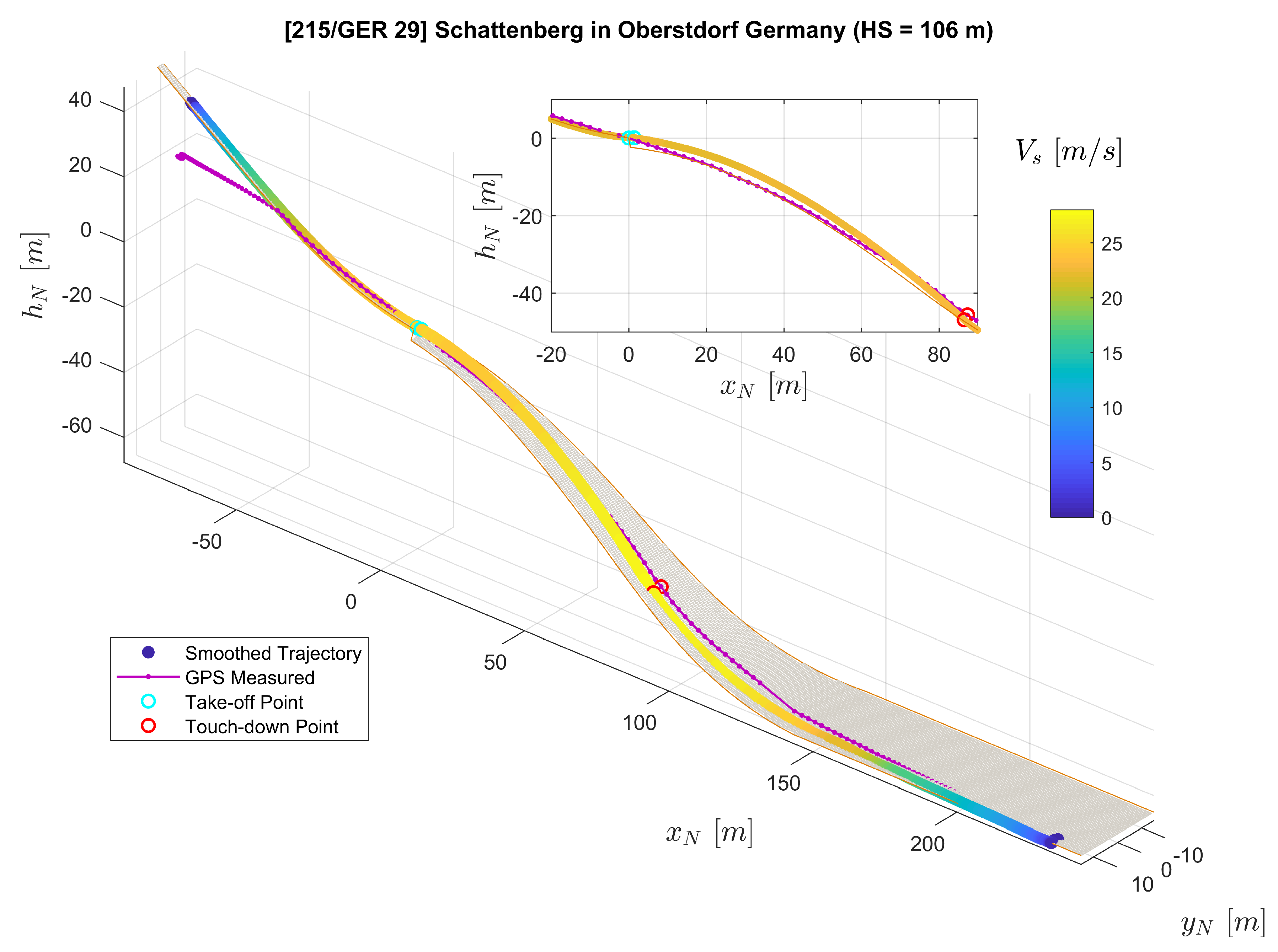
From the measurement campaign, we collected valid data sets for five different jumps in total. The reconstruction results for the rest of the four jumps are shown in
Figure 15,
Figure 16,
Figure 17 and
Figure 18. Comparing to the result from Jump No. 1 (
Figure 8), the results show similar characteristics as before which demonstrated the repeatability of the results.

 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}