Accuracy Improvement of Binocular Vision Measurement System for Slope Deformation Monitoring

Abstract
1. Introduction
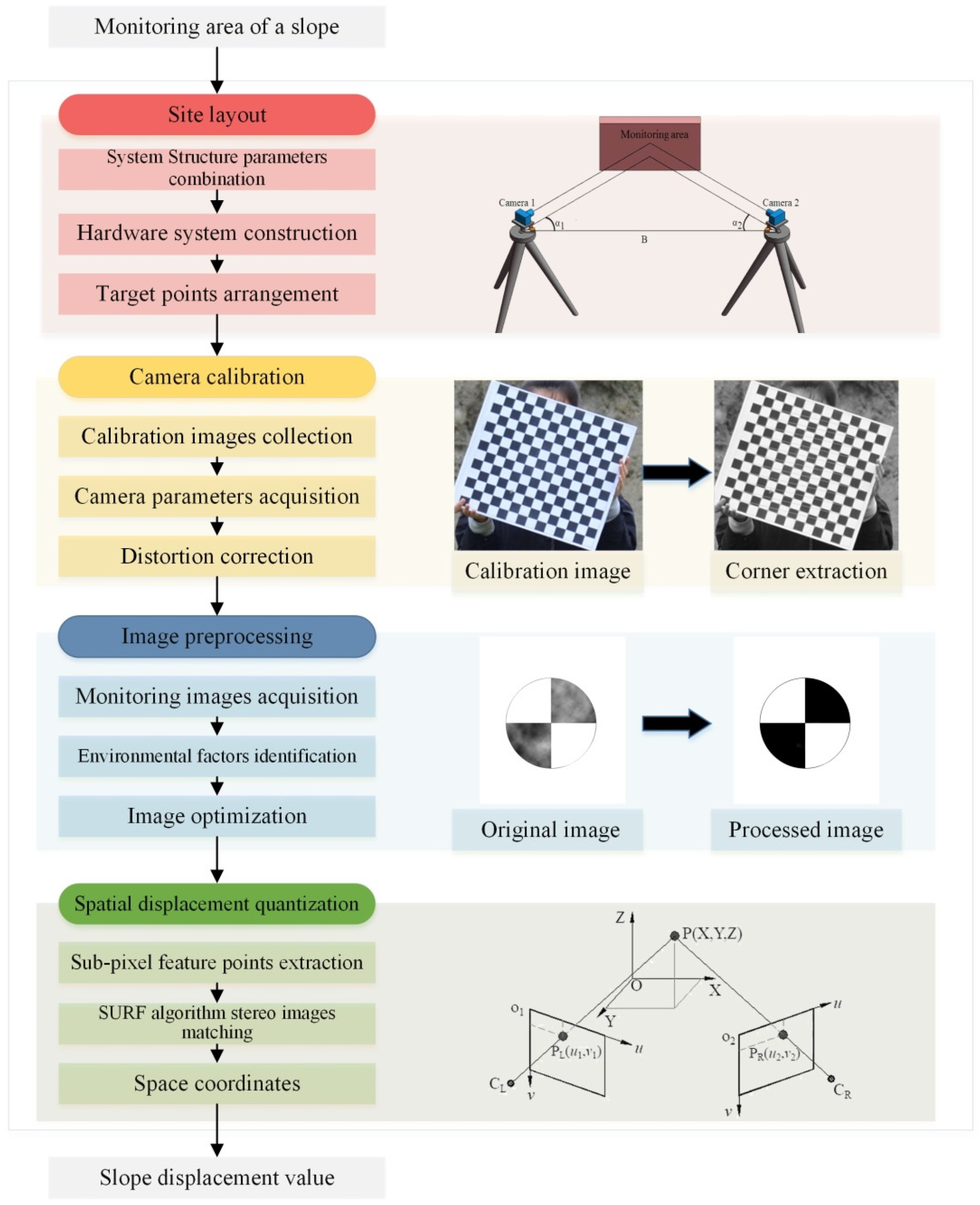
2. Binocular Vision Measurement System
2.1. Laser Rangefinder-Camera Station
2.2. Slope Deformation Monitoring Based on BVMS
3. Accuracy Analysis of System Structure Parameters
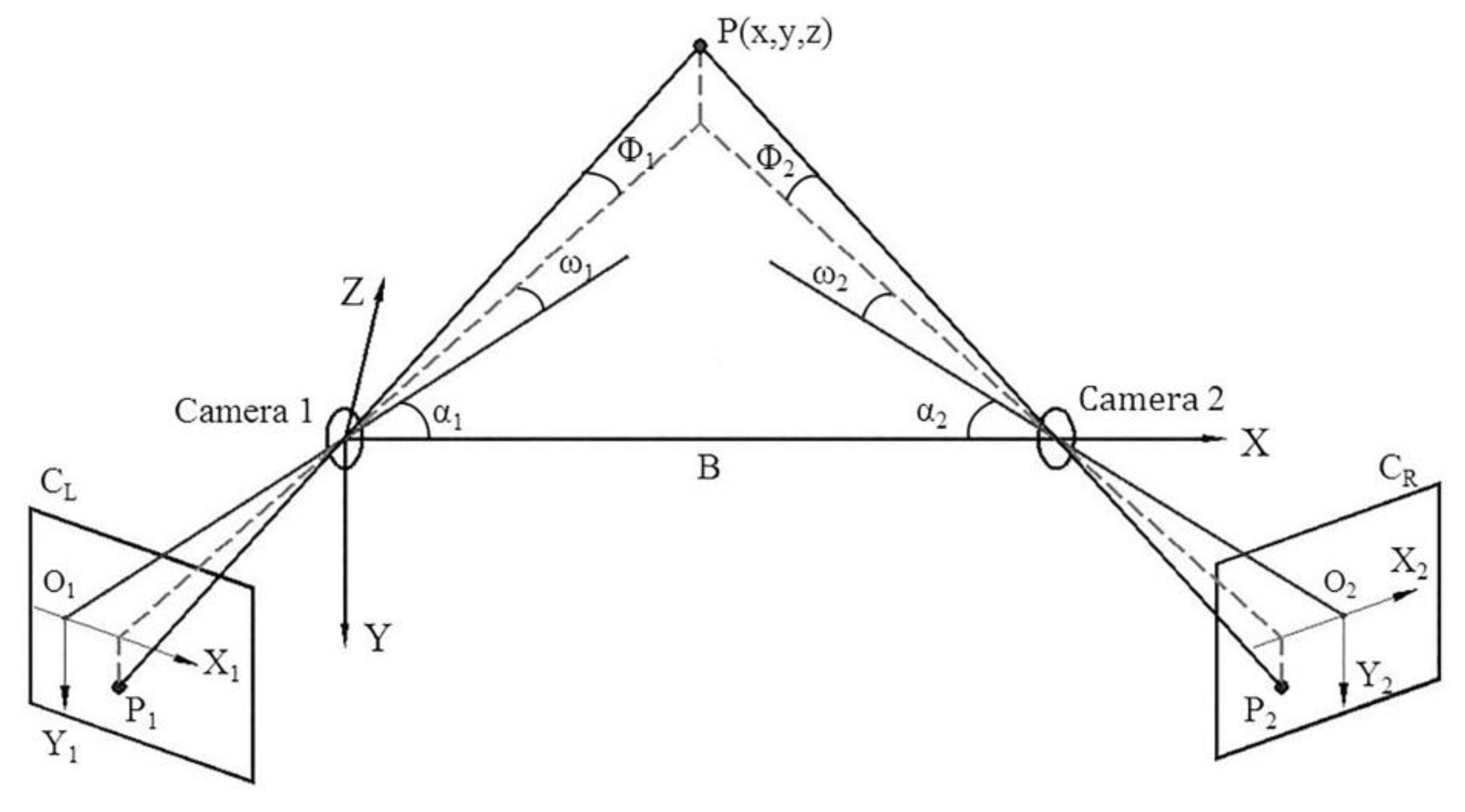
3.1. System Monitoring Model
3.2. Model Verification
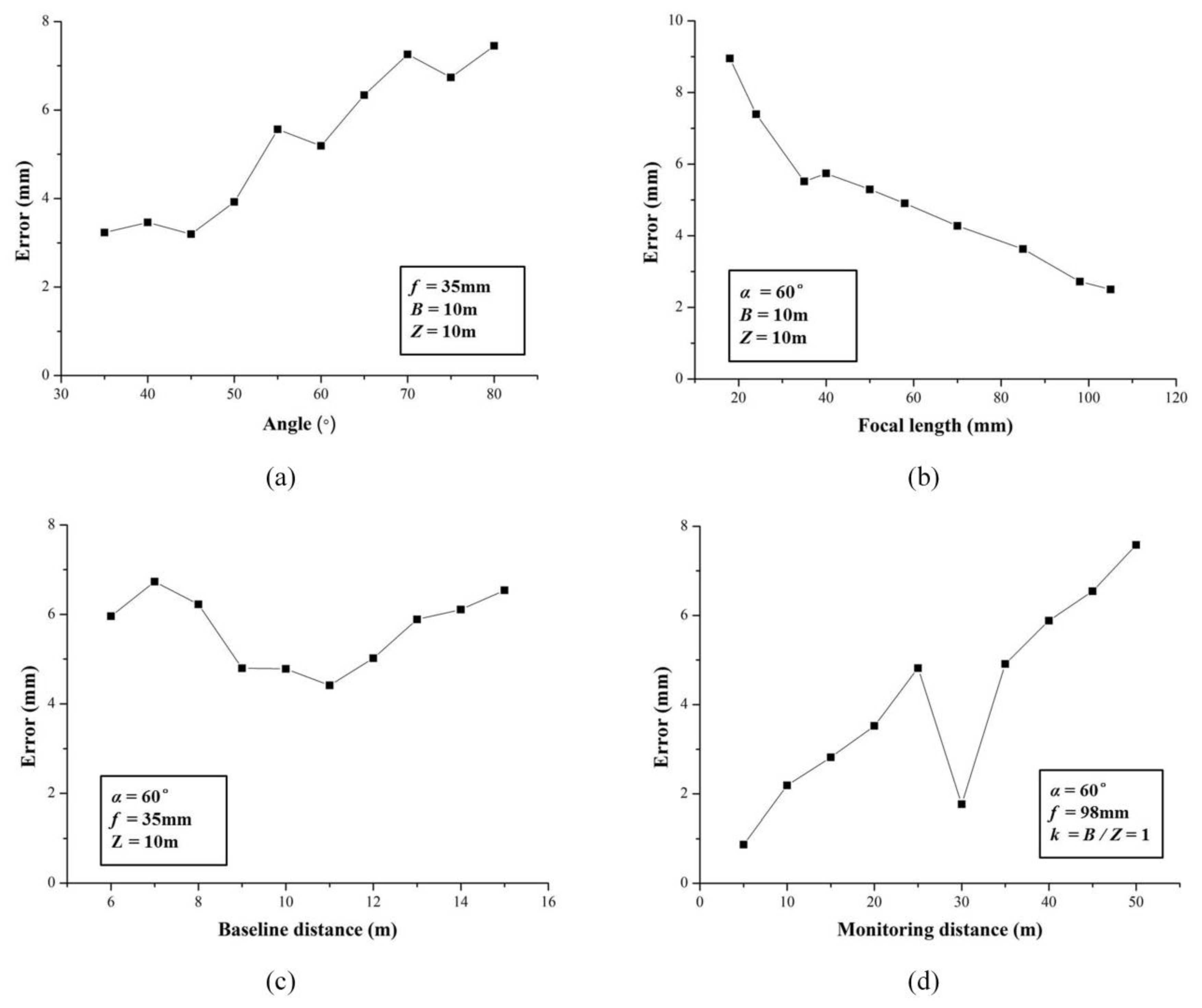
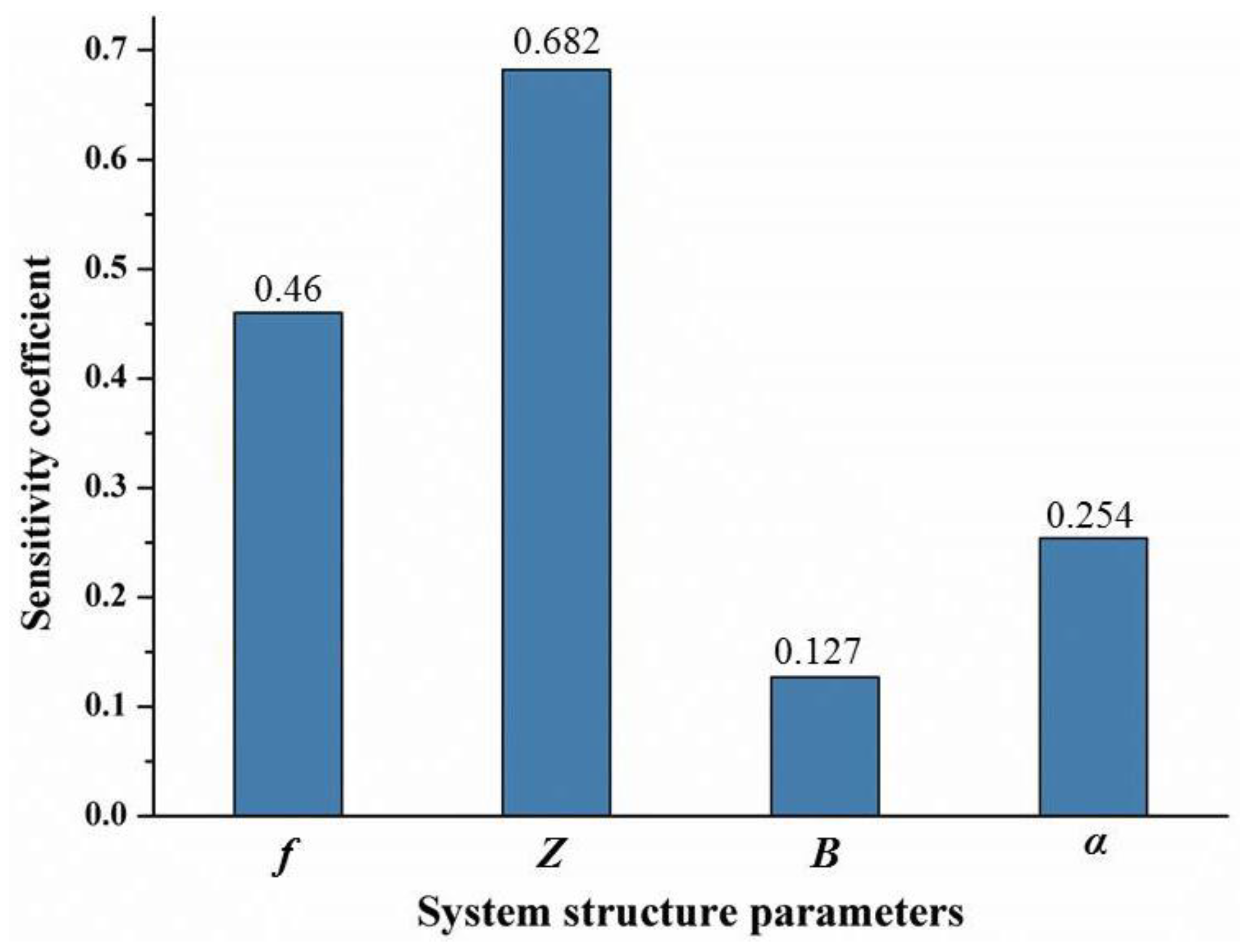
3.3. Sensitivity Analysis and Optimization Design
4. Accuracy Analysis of Environment Parameters
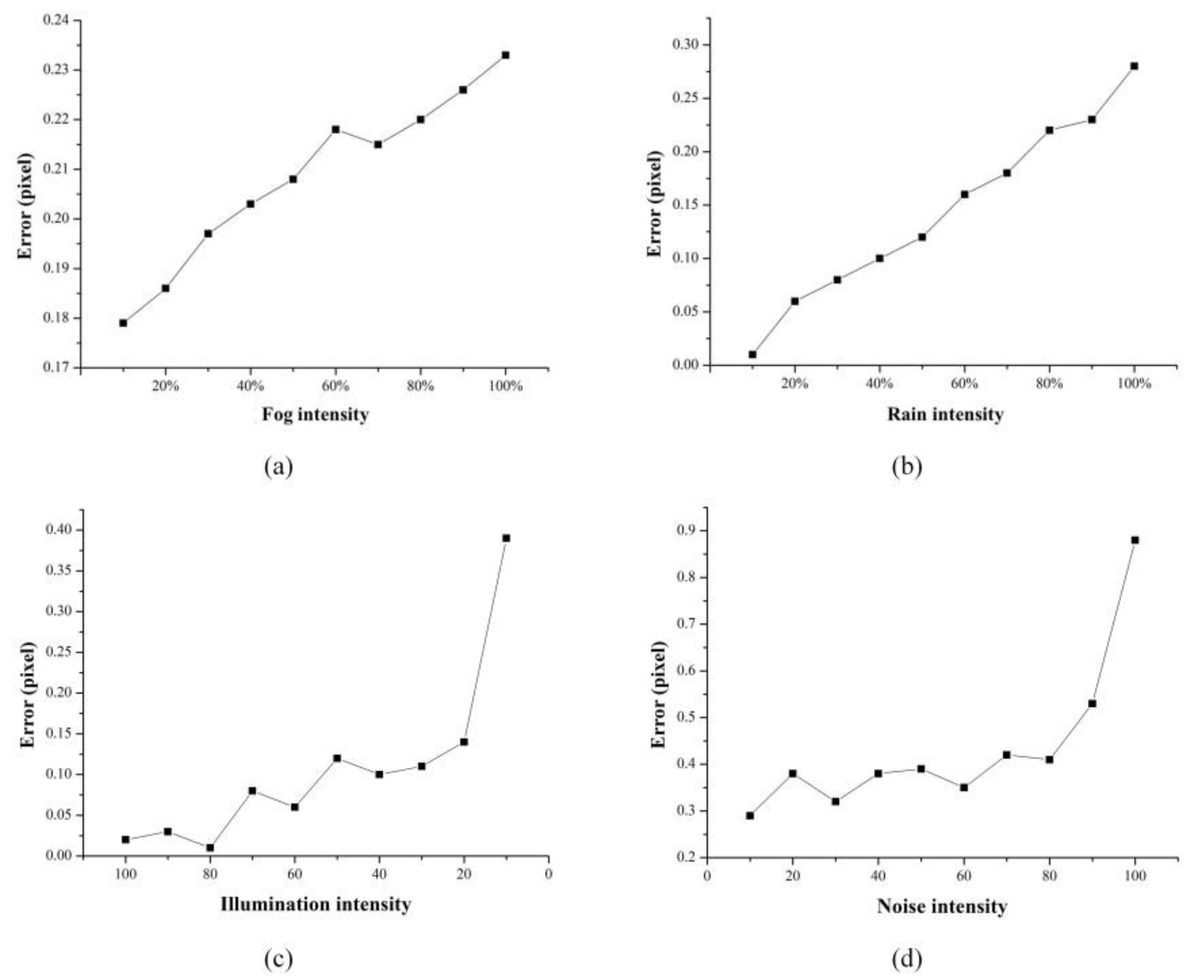
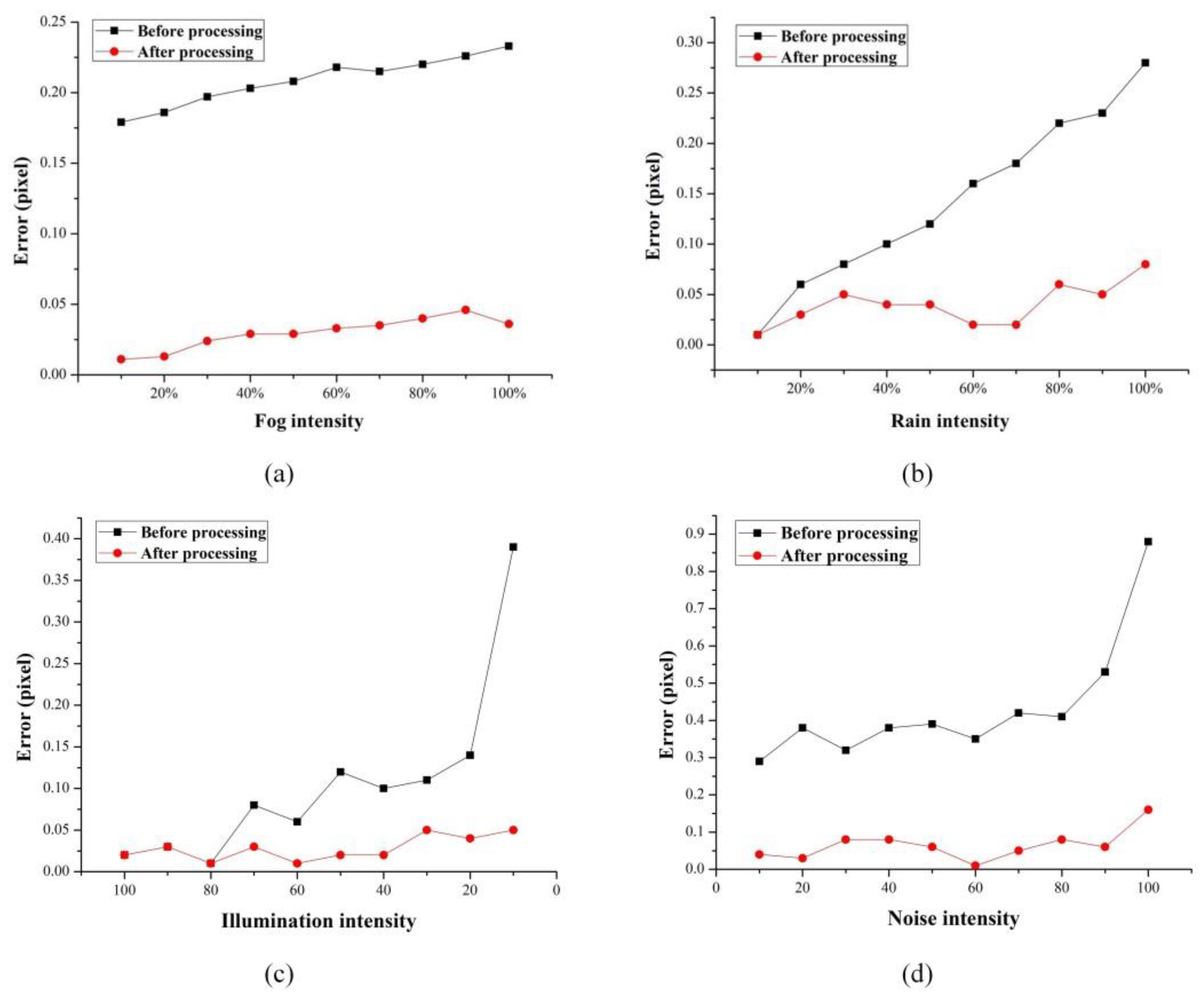
4.1. The Influence of Each Parameters
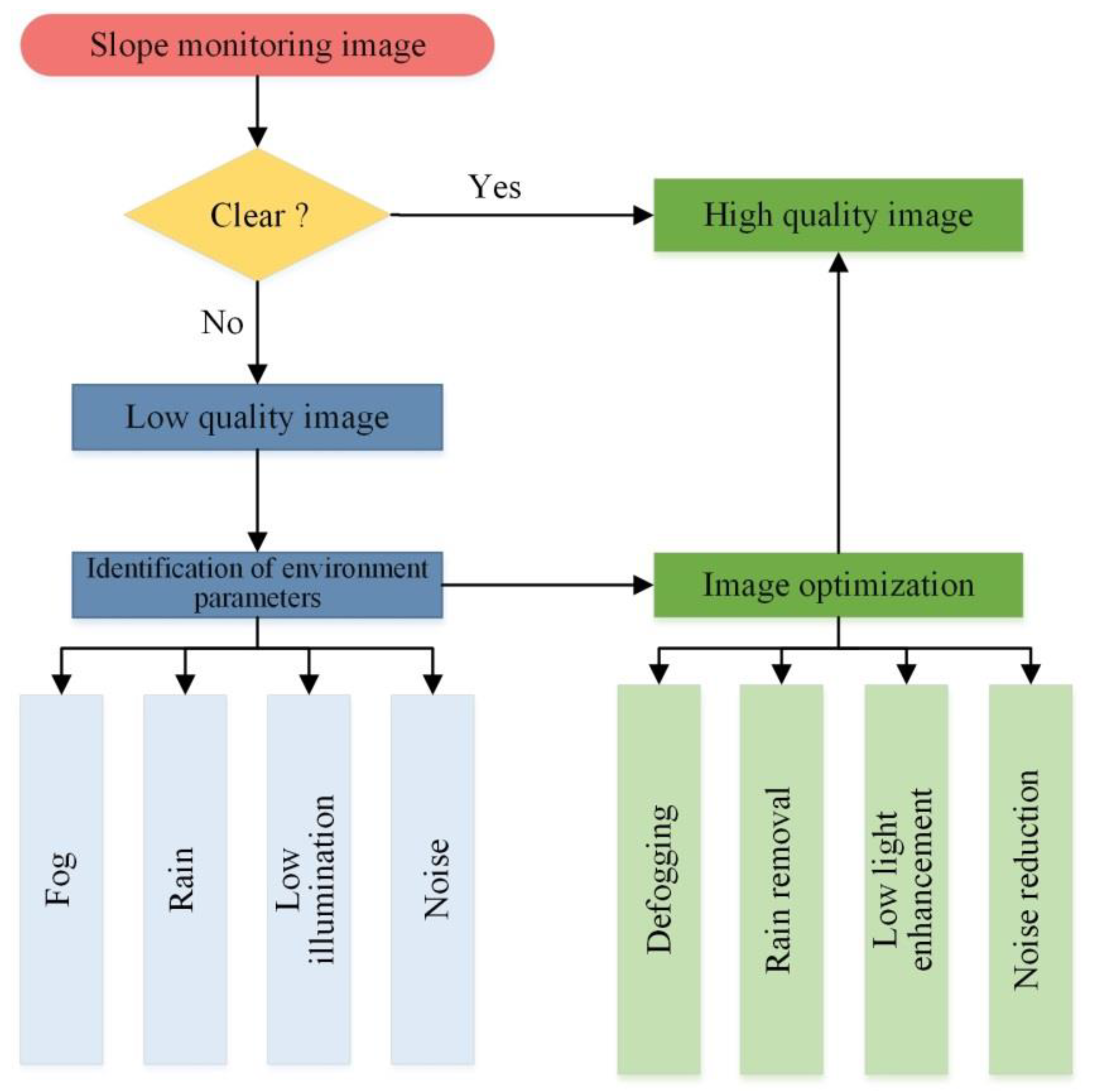
4.2. Optimization Design
- (1)
- Fog
- (2)
- Rain
- (3)
- Low illumination
- (4)
- Noise
4.3. Performance Verification
- (1)
- Interference of single environment parameter
- (2)
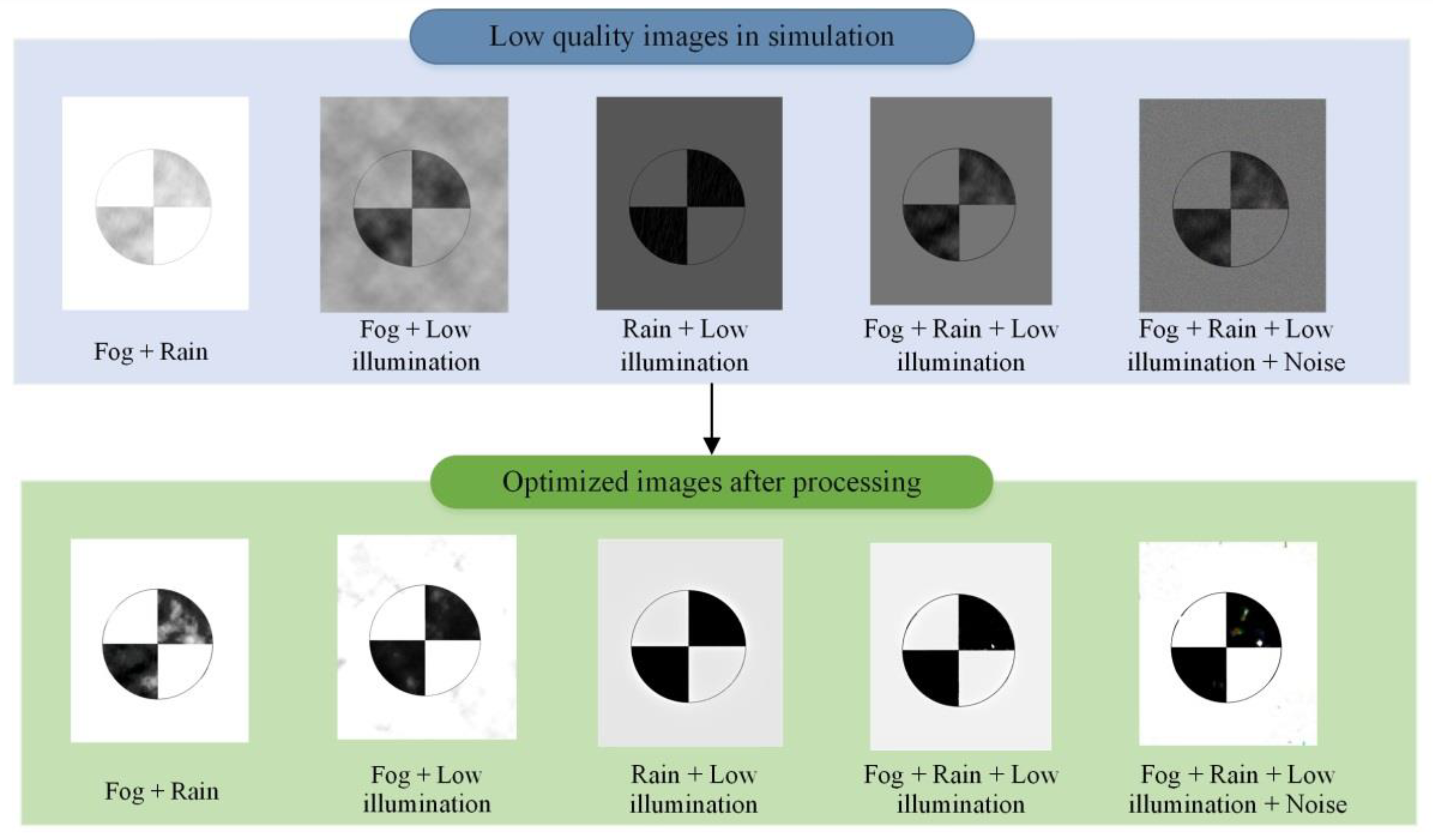
- Interference of combined environment parameters
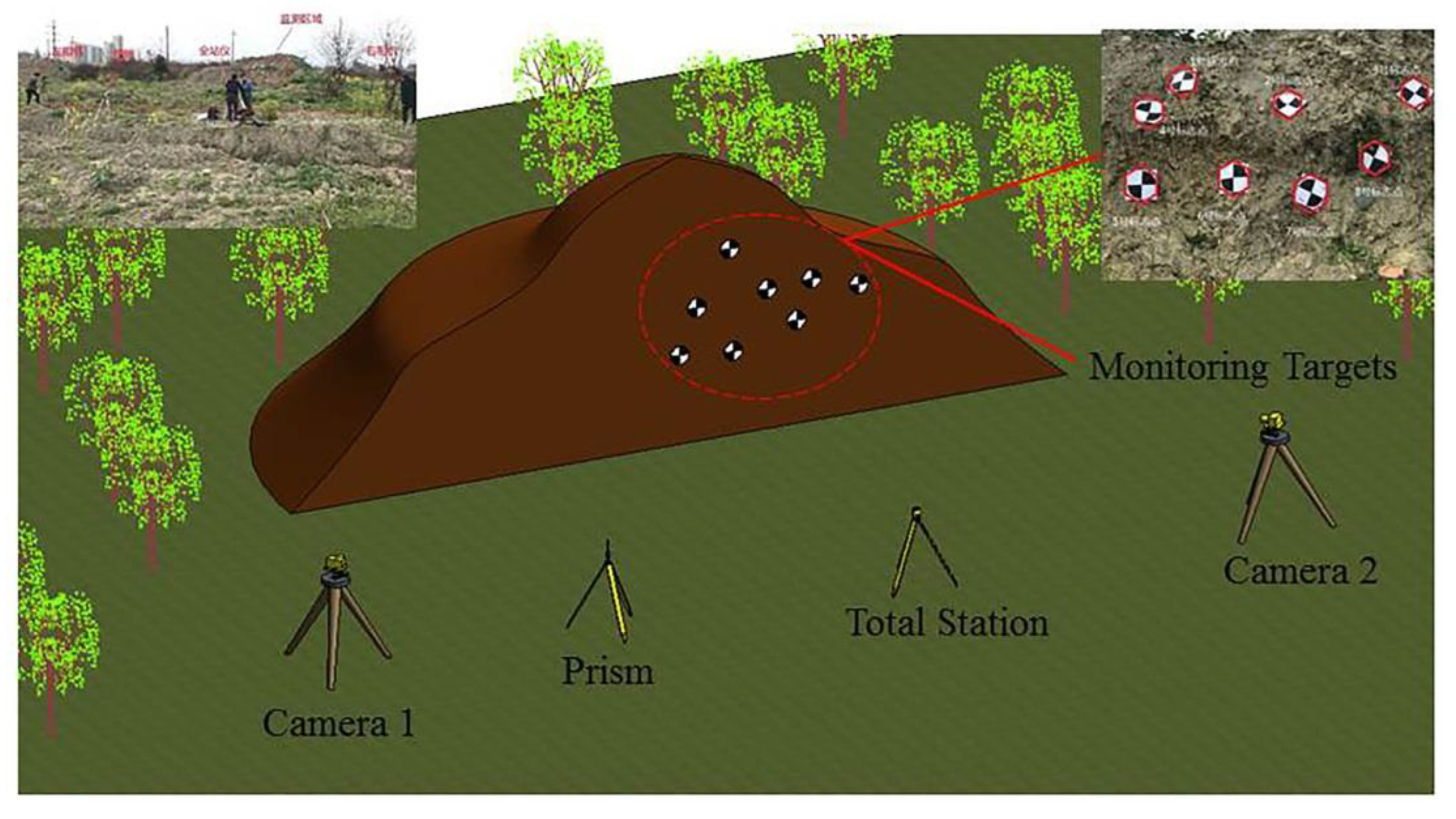
5. Field Tests
6. Conclusions
- (1)
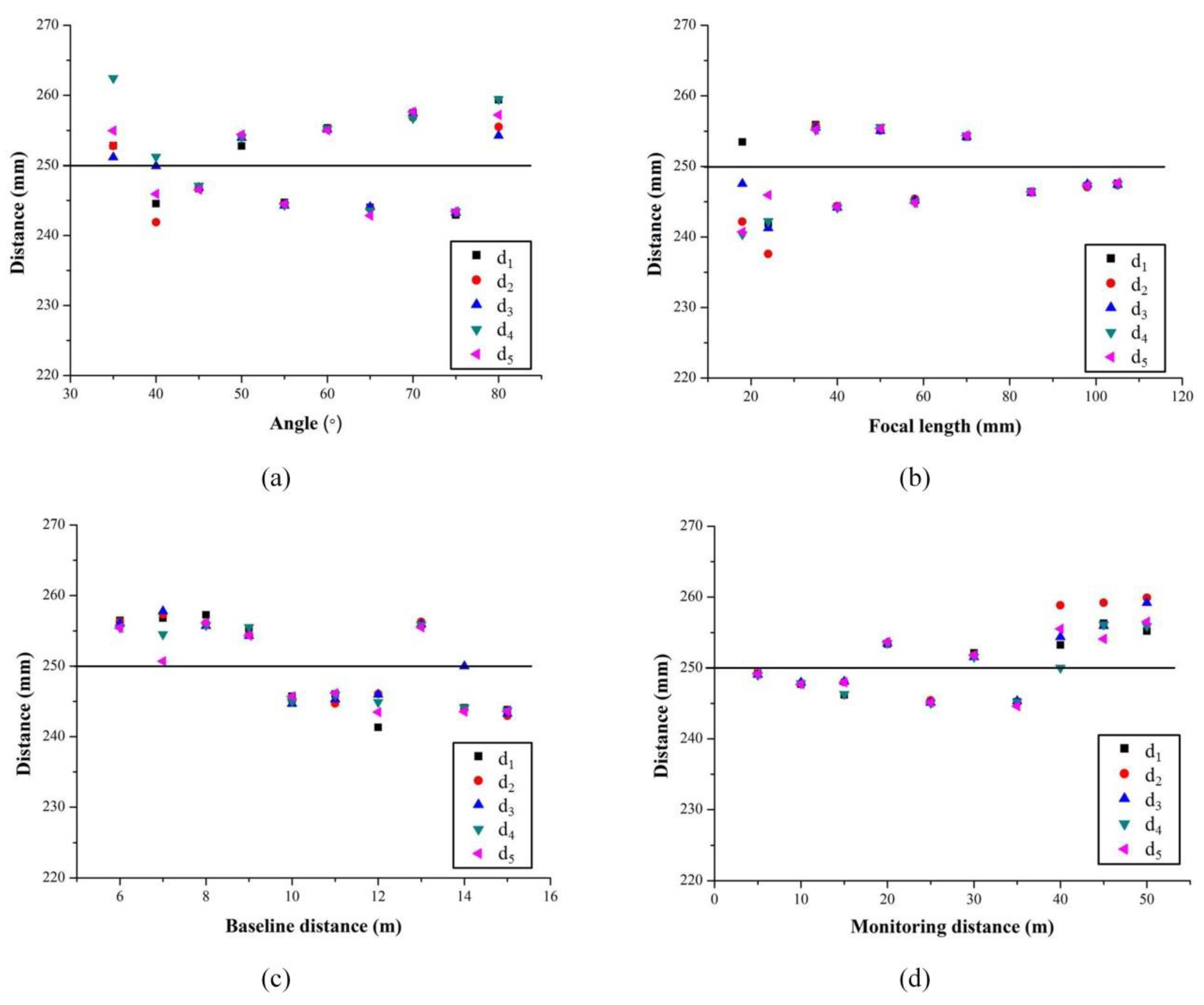
- By combining the principle of binocular vision technology and the error analysis theory, the functional relationship between structure parameters and monitoring results was studied. Further laboratory tests were performed, and the error distribution curves under the influence of the angle between optical axis and baseline, focal length, baseline distance, and monitoring distance were obtained, respectively. Furthermore, the recommendation of structure parameters combination using the BVMS was also proposed.
- (2)
- Through the environmental interference simulation tests, the error distribution curves under the influence of fog, rain, low illumination and noise were obtained. Therefore, image optimization methods are designed to deal with the interference of these four environment parameters. It relies on modifying the pixel distribution of the image to improve the contrast of the target, so as to further improve the environmental adaptability of the proposed system.
- (3)
- Finally, the slope movement is simulated on site, and the deformation is monitored employing the proposed method. The results not only verify the validity of the structure parameters combination recommendation table, but also reflect the application potentials of the BVMS for cost-effective slope health monitoring. However, its applied range and monitoring distance still need to be improved.
Author Contributions
Funding
Conflicts of Interest
References
- Kavzoglu, T.; Sahin, E.K.; Colkesen, I. Landslide susceptibility mapping using GIS-based multi-criteria decision analysis, support vector machines, and logistic regression. Landslides 2013, 11, 425–439. [Google Scholar] [CrossRef]
- Tofani, V.; Raspini, F.; Catani, F.; Casagli, N. Persistent Scatterer Interferometry (PSI) Technique for Landslide Characterization and Monitoring. Remote Sens. 2014, 5, 1045–1065. [Google Scholar] [CrossRef]
- Marek, L.; Miřijovský, J.; Tuček, P. Monitoring of the shallow landslide using UAV photogrammetry and geodetic measurements. In Engineering Geology for Society and Territory-Volume 2; Springer: Berlin, Germany, 2015; pp. 113–116. [Google Scholar]
- Benoit, L.; Briole, P.; Martin, O.; Thom, C.; Ulrich, P. Monitoring landslide displacements with the Geocube wireless network of low-cost GPS. Eng. Geol. 2015, 195, 111–121. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, L.; Ding, X.L.; Hu, J.; Li, Z.W.; Zhu, J.J. Slope deformation prior to Zhouqu, China landslide from InSAR time series analysis. Remote Sens. Environ. 2015, 156, 45–57. [Google Scholar] [CrossRef]
- Abellán, A.; Oppikofer, T.; Jaboyedoff, M.; Rosser, N.J.; Lim, M.; Lato, M.J. Terrestrial laser scanning of rock slope instabilities. Earth Surf. Process. Landf. 2014, 39, 80–97. [Google Scholar] [CrossRef]
- Ohnishi, Y.; Nishiyama, S.; Yano, T.; Matsuyama, H.; Amano, K. A study of the application of digital photogrammetry to slope monitoring systems. Int. J. Rock Mech. Min. Sci. 2006, 43, 756–766. [Google Scholar] [CrossRef]
- Hastaoğlu, K.Ö.; Gül, Y.; Poyraz, F.; Kara, B.C. Monitoring 3D areal displacements by a new methodology and software using UAV photogrammetry. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101916. [Google Scholar] [CrossRef]
- He, L.; Tan, J.; Hu, Q.; He, S.; Cai, Q.; Fu, Y.; Tang, S. Non-contact measurement of the surface displacement of a slope based on a smart binocular vision system. Sensors 2018, 18, 2890. [Google Scholar] [CrossRef]
- Hu, Q.; He, S.; Wang, S.; Liu, Y.; Zhang, Z.; He, L.; Wang, F.; Cai, Q.; Shi, R.; Yang, Y. A high-speed target-free vision-based sensor for bus rapid transit viaduct vibration measurements using CMT and ORB algorithms. Sensors 2017, 17, 1305. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Vision-based multipoint displacement measurement for structural health monitoring. Struct. Control Health Monit. 2016, 23, 876–890. [Google Scholar] [CrossRef]
- Tang, Y.; Li, L.; Wang, C.; Chen, M.; Feng, W.; Zou, X.; Huang, K. Real-time detection of surface deformation and strain in recycled aggregate concrete-filled steel tubular columns via four-ocular vision. Robot. Comput. Integr. Manuf. 2019, 59, 36–46. [Google Scholar] [CrossRef]
- Mansour, M.; Davidson, P.; Stepanov, O.; Piché, R. Relative Importance of Binocular Disparity and Motion Parallax for Depth Estimation: A Computer Vision Approach. Remote Sens. 2019, 11, 1990. [Google Scholar] [CrossRef]
- Liu, S.; Li, Y.-F. Precision 3D Motion Tracking for Binocular Microscopic Vision System. IEEE Trans. Ind. Electron. 2019, 66, 9339–9349. [Google Scholar] [CrossRef]
- Jin, D.; Yang, Y. Sensitivity analysis of the error factors in the binocular vision measurement system. Opt. Eng. 2018, 57, 104109. [Google Scholar] [CrossRef]
- Li, P.; Wang, Y.W. Analysis on Structural Parameters of Binocular Stereo Vision System. Proc. Appl. Mech. Mater. IEEE Photonics J. 2018, 10, 290–295. [Google Scholar] [CrossRef]
- Nayar, S.K.; Narasimhan, S.G. Vision in bad weather. In Proceedings of Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Contrast restoration of weather degraded images. Ieee Trans. Pattern Anal. Mach. Intell. 2003, 25, 713–724. [Google Scholar] [CrossRef]
- Li, W.; Siyu, S.; Hui, L. High-precision method of binocular camera calibration with a distortion model. Appl. Opt. 2017, 56, 2368. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Z.; Duan, G.; Cheng, J.; Jiang, X.; Tan, J. Precise and robust binocular camera calibration based on multiple constraints. Appl. Opt. 2018, 57, 5130. [Google Scholar] [CrossRef]
- Jin, D.; Yang, Y. Using distortion correction to improve the precision of camera calibration. Opt. Rev. 2019, 26. [Google Scholar] [CrossRef]
- Lu, Y.; Wang, B.; Zhang, R.; Zhou, H.; Wang, R. Analysis on Location Accuracy for Binocular Stereo Vision System. IEEE Photonics J. 2017, 10, 7800316. [Google Scholar]
- Yu, H.; Xing, T.; Xin, J. The analysis of measurement accuracy of the parallel binocular stereo vision system. In Proceedings of the 8th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Optical Test, Measurement Technology, and Equipment, Bellingham, WA, USA, 13 October 2016. [Google Scholar]
- Xu, G.; Lu, X.; Li, X.; Su, J.; Tian, G.; Sun, L. Size character optimization for measurement system with binocular vision and optical elements based on local particle swarm method. Opt. Rev. 2015, 22, 58–64. [Google Scholar] [CrossRef]
- Lu, B.-L.; Liu, Y.-L.; Sun, L. Error analysis of binocular stereo vision system applied in small scale measurement. Acta Photonica Sin. 2015, 44, 1011001. [Google Scholar]
- Deng, H.; Wang, F.; Zhang, J.; Hu, G.; Ma, M.; Zhong, X. Vision measurement error analysis for nonlinear light refraction at high temperature. Appl. Opt. 2018, 57, 5556–5565. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Li, X.; Su, J.; Pan, H.; Geng, L. Integrative evaluation of the optimal configuration for the measurement of the line segments using stereo vision. Opt. Int. J. Light Electron Opt. 2013, 124, 1015–1018. [Google Scholar] [CrossRef]
- Tang, J.; Zhang, M.; Wang, L. A data processing method to improve the accuracy of depth measurement by binocular stereo vision system. In Proceedings of the Optical Metrology and Inspection for Industrial Applications II, Beijing, China, 5–7 November 2012; p. 856306. [Google Scholar]
- Xu, G.; Li, X.; Su, J.; Lan, Z.; Tian, G.; Lu, X. Comprehensive evaluation for measurement errors of a binocular vision system with long virtual baseline generated from double reflection mirrors. Optik 2015, 126, 4621–4624. [Google Scholar] [CrossRef]
- Gu, K.; Zhai, G.; Lin, W.; Liu, M. The analysis of image contrast: From quality assessment to automatic enhancement. IEEE Trans. Cybern. 2015, 46, 284–297. [Google Scholar] [CrossRef]
- Yeganeh, H.; Ziaei, A.; Rezaie, A. A novel approach for contrast enhancement based on histogram equalization. In Proceedings of the 2008 International Conference on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 13–15 May 2008; pp. 256–260. [Google Scholar]
- Ma, J.; Plonka, G. The curvelet transform. IEEE Signal Process. Mag. 2010, 27, 118–133. [Google Scholar] [CrossRef]
- Oh, J.; Hwang, H. Feature enhancement of medical images using morphology-based homomorphic filter and differential evolution algorithm. Int. J. Control. Syst. 2010, 8, 857–861. [Google Scholar] [CrossRef]
- Banham, M.R.; Katsaggelos, A.K. Digital image restoration. IEEE Signal Process. Mag. 1997, 14, 24–41. [Google Scholar] [CrossRef]
- McCartney, E.J. Optics of the Atmosphere: Scattering by Molecules and Particles; John Wiley and Sons, Inc.: New York, NY, USA, 1976; p. 421. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 1397–1409. [Google Scholar] [CrossRef]
- Yan-Hai, W.U.; Zhang, J.; Chen, K. Improved defogging algorithm of single image based on mean filter. J. Xian Univ. Sci. Technol. 2016. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22. [Google Scholar] [CrossRef]
- Chen, S.Z.; Wang, W.Y. Improved Algorithm Based on Harris Corner Point Detection. Mod. Comput. 2010, 1, 44–46. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Vision, L.V.G.J.C.; Understanding, I. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Liu, Y.-F.; Guo, H.; Nie, D.-J.; Guo, X.-L.; Chen, F. Analysis on measurement accuracy of binocular stereo vision system. Donghua Daxue Xuebao(Ziran Ban) 2012, 38, 572–576. [Google Scholar]
- Fei, Y.-T. Error Theory and Data Processing; Mechanical Industry Press: Wuhan, China, 2010; p. 102. [Google Scholar]
- Wei-shen, Z.; Guang, Z. Susceptibility analyses of parameters of jointed rock to breaking area in surrounding rock. Undergr. Space 1994, 14, 10–15. [Google Scholar]
- Long, Y.; Zhengxu, Z.; Yiqi, Z.J.C.J.o.S.I. Accuracy analysis and configuration design of stereo photogrammetry system based on CCD. Article 2008, 29, 410. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Single Image Haze Removal Using Dark Channel Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar]
- Fu, X.; Huang, J.; Zeng, D.; Yue, H.; Ding, X.; Paisley, J. Removing Rain from Single Images via a Deep Detail Network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25. [Google Scholar] [CrossRef]
- Xu, L.; Yan, Q.; Xia, Y.; Jia, J. Structure extraction from texture via relative total variation. ACM Trans. Graph. 2012, 31, 1. [Google Scholar] [CrossRef]
- Guo, X. LIME: A Method for Low-light IMage Enhancement. IEEE Trans. Image Process. 2017, 26, 982–993. [Google Scholar] [CrossRef] [PubMed]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Focal Length (mm) | Monitoring Distance (m) | Baseline Distance (m) | The Angle Between Optical Axis and Baseline (°) |
|---|---|---|---|---|
| Reference value | 100 | 40 | 40 | 45 |
| Value range | 50–300 | 20–100 | 32–48 | 30–50 |
| Step length | 50 | 20 | 4 | 5 |
| Error (mm) | Focal Length (mm) | Monitoring Distance (m) | Baseline Distance (m) | Angle Between Optical Axis and Baseline (°) |
|---|---|---|---|---|
| 4.8–7.7 | 50 | 20 | 16–24 | 30–50 |
| 3.55–6.45 | 100 | 20 | 16–24 | 30–50 |
| 3.13–6.03 | 150 | 20 | 16–24 | 30–50 |
| 2.92–5.82 | 200 | 20 | 16–24 | 30–50 |
| 2.72–5.62 | 300 | 20 | 16–24 | 30–50 |
| 7.29–10.19 | 50 | 40 | 32–48 | 30–50 |
| 4.8–7.7 | 100 | 40 | 32–48 | 30–50 |
| 3.96–6.86 | 150 | 40 | 32–48 | 30–50 |
| 3.55–6.45 | 200 | 40 | 32–48 | 30–50 |
| 3.13–6.03 | 300 | 40 | 32–48 | 30–50 |
| 9.79–12.69 | 50 | 60 | 48–72 | 30–50 |
| 6.05–8.95 | 100 | 60 | 48–72 | 30–50 |
| 4.8–7.7 | 150 | 60 | 48–72 | 30–50 |
| 4.17–7.07 | 200 | 60 | 48–72 | 30–50 |
| 3.55–6.45 | 300 | 60 | 48–72 | 30–50 |
| 12.29–15.19 | 50 | 80 | 64–96 | 30–50 |
| 7.29–10.19 | 100 | 80 | 64–96 | 30–50 |
| 5.63–8.53 | 150 | 80 | 64–96 | 30–50 |
| 4.8–7.7 | 200 | 80 | 64–96 | 30–50 |
| 3.96–6.86 | 300 | 80 | 64–96 | 30–50 |
| 14.79–17.69 | 50 | 100 | 80–120 | 30–50 |
| 8.54–11.44 | 100 | 100 | 80–120 | 30–50 |
| 6.46–9.36 | 150 | 100 | 80–120 | 30–50 |
| 5.42–8.32 | 200 | 100 | 80–120 | 30–50 |
| 4.38–7.28 | 300 | 100 | 80–120 | 30–50 |
| Number | Types of Environment Parameter | Error before Processing (pixels) | Error after Processing (pixels) | ||
|---|---|---|---|---|---|
| x | y | x | y | ||
| 1 | Fog + Rain | 0.17 | 0.075 | 0.049 | 0.066 |
| 2 | Fog + Low Illumination | 0.092 | 0.027 | 0.012 | 0.029 |
| 3 | Rain + Low Illumination | 0.011 | 0.056 | 0.08 | 0.025 |
| 4 | Fog + Rain + Low Illumination | 0.183 | 0.085 | 0.038 | 0.006 |
| 5 | Fog + Rain + Low Illumination + Noise | 0.515 | 0.721 | 0.11 | 0.042 |
| Focal Length (mm) | The Angle Between Optical Axis and Baseline (°) | Monitoring Distance (m) | Baseline Distance (m) | Ratio k of Baseline Distance to Monitoring Distance |
|---|---|---|---|---|
| 100 | 45 | 20 | 24 | 1.2 |
| 40 | 48 | |||
| 60 | 72 | |||
| 80 | 96 |
| Monitoring Distance (m) | X Direction Error (mm) | Y Direction Error (mm) | Z Direction Error (mm) | Total Error (mm) |
|---|---|---|---|---|
| 20 | 2.04 | 1.82 | 3.21 | 4.15 |
| 40 | 4.20 | 3.76 | 3.18 | 6.47 |
| 60 | 4.81 | 4.82 | 4.77 | 8.31 |
| 80 | 7.13 | 5.97 | 7.04 | 11.67 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Q.; Feng, Z.; He, L.; Shou, Z.; Zeng, J.; Tan, J.; Bai, Y.; Cai, Q.; Gu, Y. Accuracy Improvement of Binocular Vision Measurement System for Slope Deformation Monitoring. Sensors 2020, 20, 1994. https://doi.org/10.3390/s20071994
Hu Q, Feng Z, He L, Shou Z, Zeng J, Tan J, Bai Y, Cai Q, Gu Y. Accuracy Improvement of Binocular Vision Measurement System for Slope Deformation Monitoring. Sensors. 2020; 20(7):1994. https://doi.org/10.3390/s20071994
Chicago/Turabian StyleHu, Qijun, Ziyuan Feng, Leping He, Zihe Shou, Junsen Zeng, Jie Tan, Yu Bai, Qijie Cai, and Yucheng Gu. 2020. "Accuracy Improvement of Binocular Vision Measurement System for Slope Deformation Monitoring" Sensors 20, no. 7: 1994. https://doi.org/10.3390/s20071994
APA StyleHu, Q., Feng, Z., He, L., Shou, Z., Zeng, J., Tan, J., Bai, Y., Cai, Q., & Gu, Y. (2020). Accuracy Improvement of Binocular Vision Measurement System for Slope Deformation Monitoring. Sensors, 20(7), 1994. https://doi.org/10.3390/s20071994