Linear and Nonlinear Deformation Effects in the Permanent GNSS Network of Cyprus



Abstract
1. Introduction
2. Processing of Continuous GNSS Data
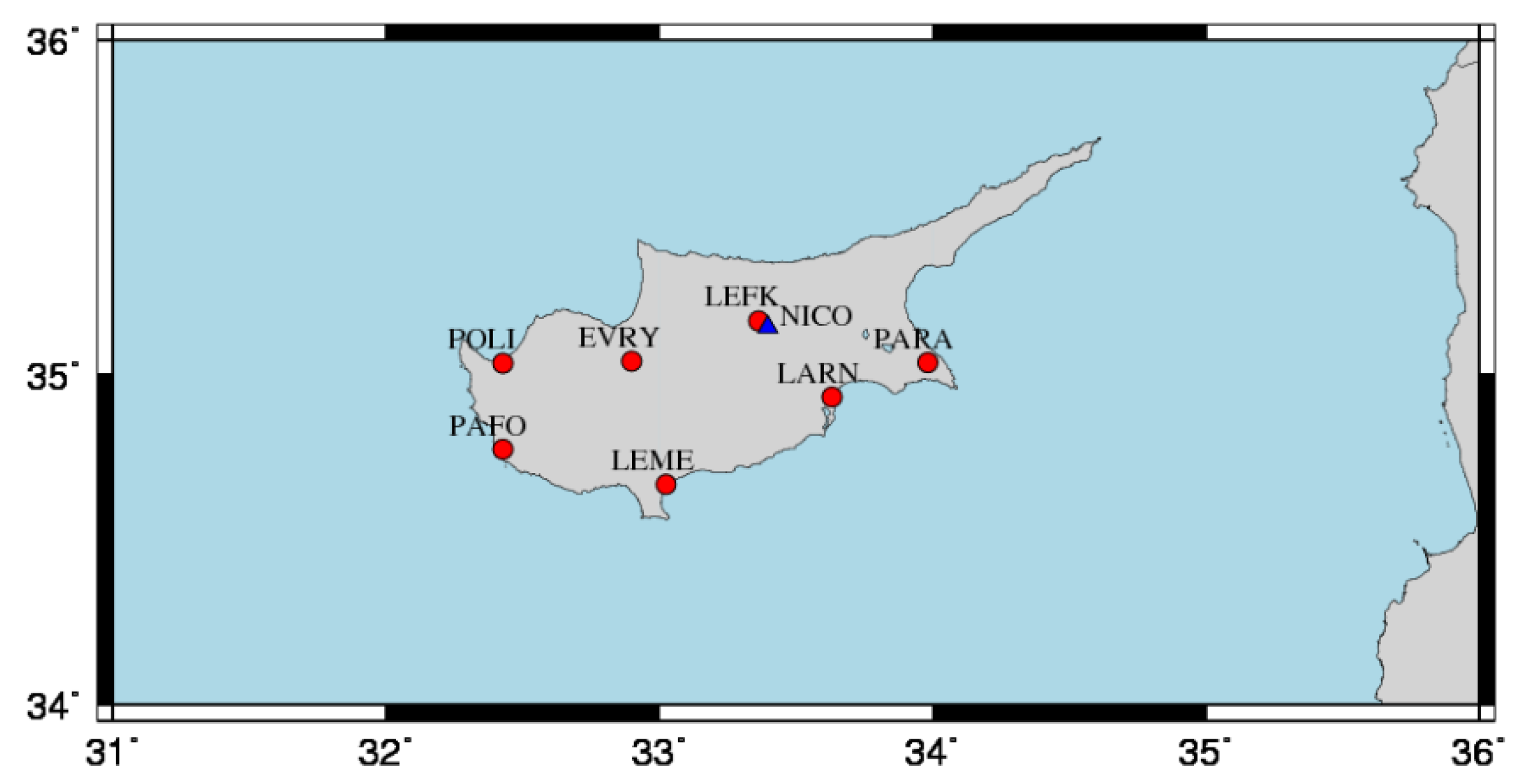
2.1. GNSS Permanent Stations in Cyprus
2.2. Observation Dataset and Software
2.3. Computation of Daily Solutions
2.4. Multi-Year Solution and Quality Assessment
3. Horizontal and Vertical Secular Displacements in Cyprus
4. Analysis of Position Time Series at CYPOS Stations
4.1. Station Discontinuities
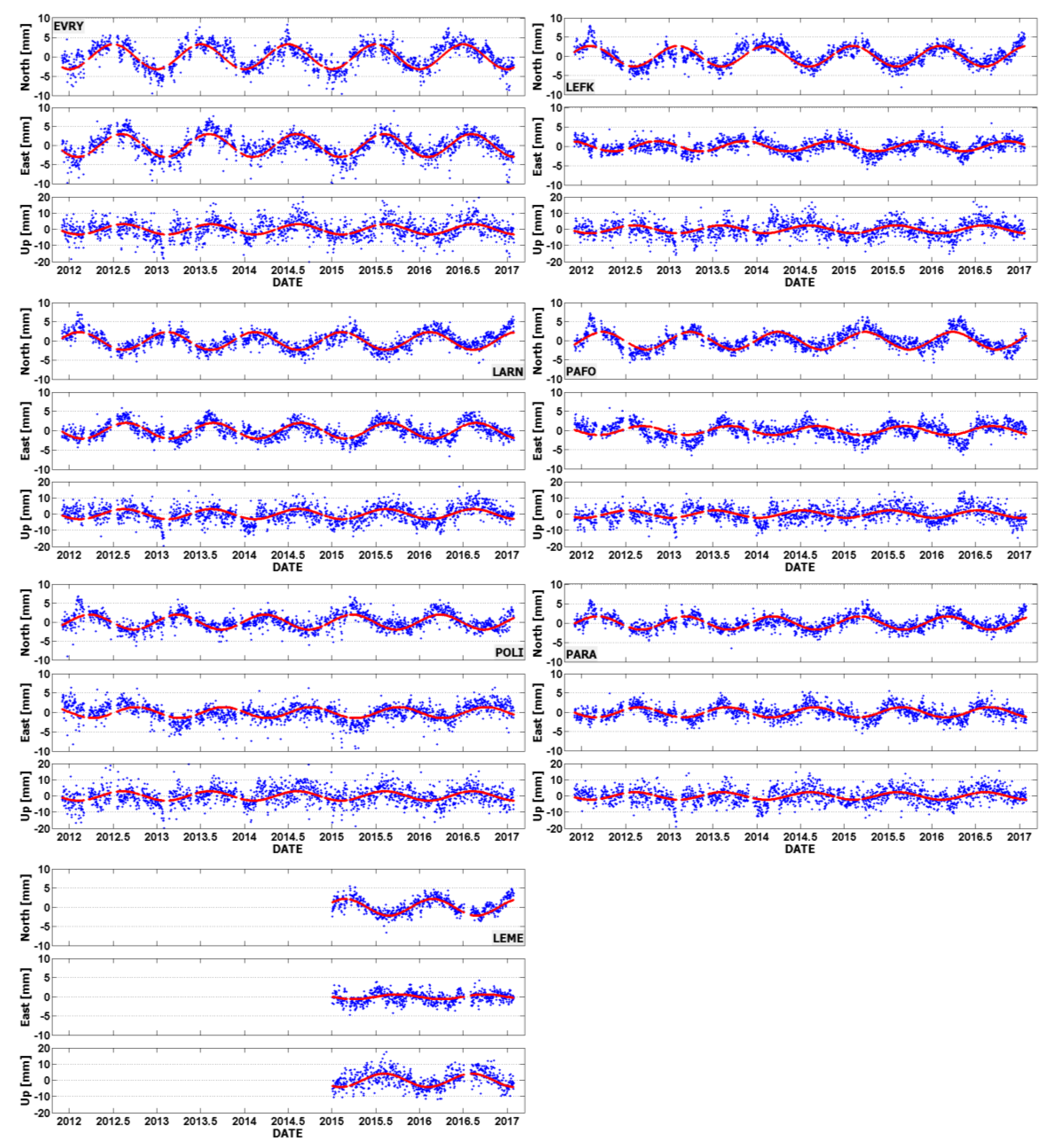
4.2. Estimation of Periodic Signals
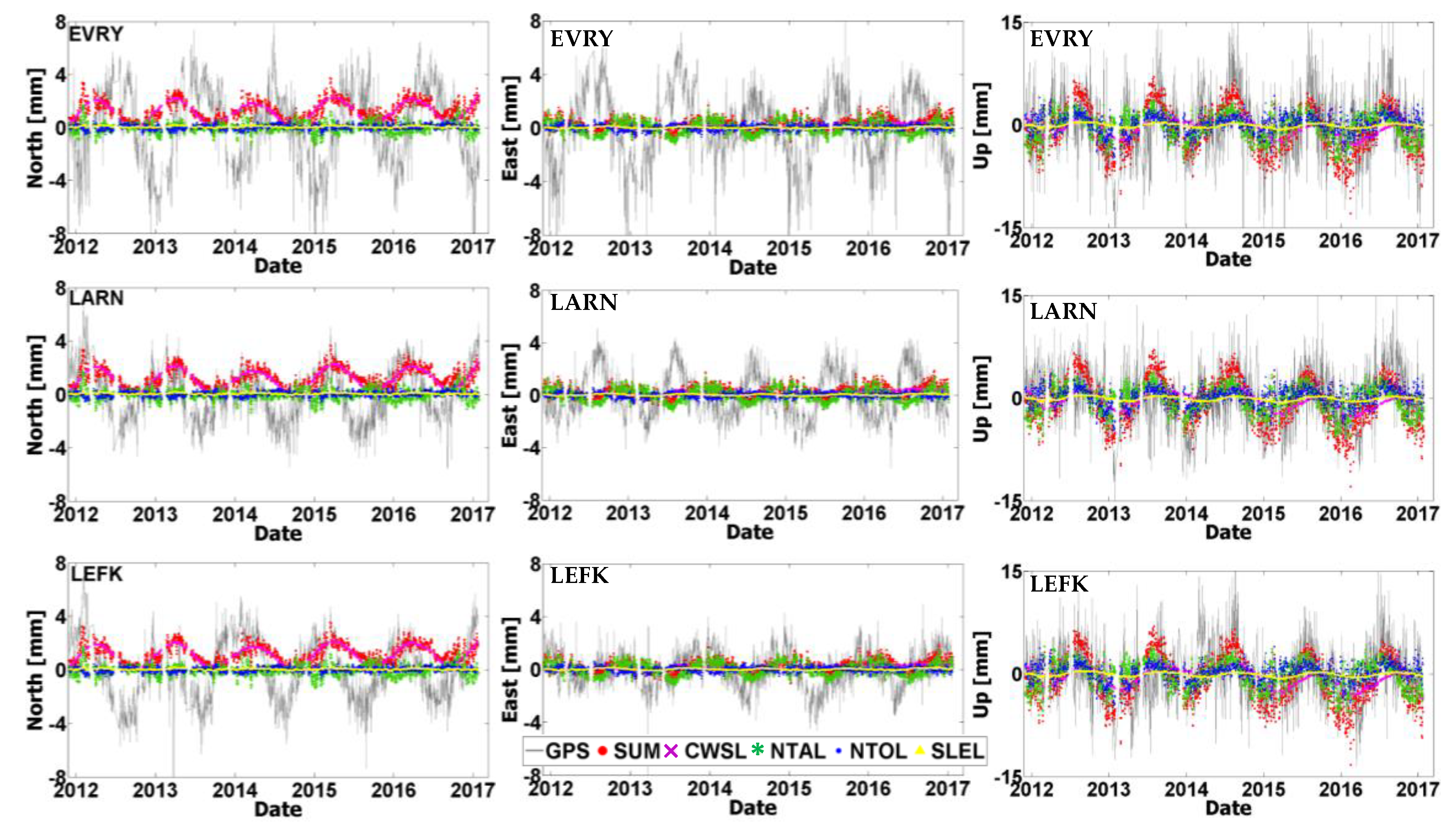
4.3. Comparison with Geophysical Loading Models
5. Conclusions
- the area of Cyprus seems to be stable, without suffering any notable local crustal deformations, at least within the time range considered in the present study (11/2011–01/2017);
- the GNSS station that is located in Larnaca (LARN) shows some significant local effects, both in the horizontal and vertical components of its position time series. It is surmised that these effects are attributed to the underlying geology;
- the horizontal and vertical positions of all CYPOS GNSS stations have annual periodic variations of considerable magnitude (several mm)—the semi-annual periodic displacements however were found to be negligible;
- some of the CYPOS GNSS stations appear to have periodic variations in their spatial positions at higher frequencies (120 to 60 days)—the related results have not been presented herein (due to space limitations) and they need to be investigated in detail in the future.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Sella, G.F.; Dixon, T.H.; Mao, A. REVEL: A model for Recent plate velocities from space geodesy. J. Geophys. Res. Solid Earth 2002, 107. [Google Scholar] [CrossRef]
- Altamimi, Z.; Métivier, L.; Collilieux, X. ITRF2008 plate motion model. J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef]
- Reilinger, R.; McClusky, S.; Vernant, P.; Lawrence, S.; Ergintav, S.; Cakmak, R.; Ozener, H.; Kadirov, F.; Guliev, I.; Stepanyan, R.; et al. GPS constraints on continental deformation in the Africa-Arabia-Eurasia continental collision zone and implications for the dynamics of plate interactions. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Prawirodirdjo, L.; Bock, Y. Instantaneous global plate motion model from 12 years of continuous GPS observations. J. Geophys. Res. Solid Earth 2004, 109, B08405. [Google Scholar] [CrossRef]
- Bastos, M.L.; Bos, M.S.; Fernandes, R. Deformation and Tectonics: Contribution of GPS Measurements to Plate Tectonics—Overview and Recent Developments. In Sciences of Geodesy—I; Xu, G., Ed.; Springer: Berlin/Heidelberg, Germany, 2010; pp. 155–184. [Google Scholar]
- King, M.A.; Altamimi, Z.; Boehm, J.; Bos, M.; Dach, R.; Elosegui, P.; Fund, F.; Hernández-Pajares, M.; Lavallee, D.; Mendes Cerveira, P.J.; et al. Improved Constraints on Models of Glacial Isostatic Adjustment: A Review of the Contribution of Ground-Based Geodetic Observations. Surv. Geophys. 2010, 31, 465–507. [Google Scholar] [CrossRef]
- Argus, D.F.; Peltier, W.R. Constraining models of postglacial rebound using space geodesy: A detailed assessment of model ICE-5 G (VM2) and its relatives. Geophys. J. Int. 2010, 18, 697–723. [Google Scholar] [CrossRef]
- Nocquet, J.-M.; Calais, E.; Parsons, B. Geodetic constraints on glacial isostatic adjustment in Europe. Geophys. Res. Lett. 2005, 32, L06308. [Google Scholar] [CrossRef]
- Lidberg, M.; Johansson, J.M.; Scherneck, H.-G.; Davis, J.L. An improved and extended GPS-derived 3 D velocity field of the glacial isostatic adjustment (GIA) in Fennoscandia. J. Geod. 2007, 81, 213–230. [Google Scholar] [CrossRef]
- Vey, S.; Calais, E.; Llubes, M.; Florsch, N.; Woppelmann, G.; Hinderer, J.; Amalvict, M.; Lalancette, M.F.; Simon, B.; Duquenne, F.; et al. GPS measurements of ocean loading and its impact on zenith tropospheric delay estimates: A case study in Brittany, France. J. Geod. 2002, 76, 419–427. [Google Scholar] [CrossRef]
- Dach, R.; Böhm, J.; Lutz, S.; Steigenberger, P.; Beutler, G. Evaluation of the impact of atmospheric pressure loading modeling on GNSS data analysis. J. Geod. 2011, 85, 75–91. [Google Scholar] [CrossRef]
- Dong, D.; Fang, Y.; Bock, Y.; Cheng, S.; Miyazaki, S. Anatomy of apparent seasonal variations from GPS-derived site position time series. J. Geophys. Res. Solid Earth 2002, 107. [Google Scholar] [CrossRef]
- Penna, N.T.; King, M.A.; Stewart, M.P. GPS height time series: Short-period origins of spurious long-period signals. J. Geophys. Res. Solid Earth 2007, 112, B02402. [Google Scholar] [CrossRef]
- Van Dam, T.M.; Blewitt, G.; Heflin, M.B. Atmospheric pressure loading effects on Global Positioning System coordinate determinations. J. Geophys. Res. Solid Earth 1994, 99, 23939–23950. [Google Scholar] [CrossRef]
- Van Dam, T.M.; Wahr, J. Modeling environment loading effects: A review. Phys. Chem. Earth 1998, 23, 1077–1087. [Google Scholar] [CrossRef]
- King, M.A.; Watson, C.S. Long GPS coordinate time series: Multipath and geometry effects. J. Geophys. Res. Solid Earth 2010, 115. [Google Scholar] [CrossRef]
- Goebell, S.; King, M.A. Effects of azimuthal multipath asymmetry on long GPS coordinate time series. GPS Solut. 2011, 15, 287–297. [Google Scholar] [CrossRef]
- Steigenberger, P.; Rothacher, M.; Fritsche, M.; Rülke, A.; Dietrich, R. Quality of reprocessed GPS satellite orbits. J. Geod. 2009, 83, 241–248. [Google Scholar] [CrossRef]
- Munekane, H.; Boehm, J. Numerical simulation of troposphere-induced errors in GPS-derived geodetic time series over Japan. J. Geod. 2010, 84, 405–417. [Google Scholar] [CrossRef]
- Williams, S.D.P. Offsets in Global Positioning System time series. J. Geophys. Res. Solid Earth 2003, 108. [Google Scholar] [CrossRef]
- Perfetti, N. Detection of station coordinate discontinuities within the Italian GPS Fiducial Network. J. Geod. 2006, 80, 381–396. [Google Scholar] [CrossRef]
- Chatzinikos, M.; Fotiou, A.; Pikridas, C. The effects of the receiver and satellite antenna phase center models on local and regional GPS networks. In Proceedings of the International Symposium: Modern Technologies, Educations and Professional Practice in Geodesy and Relative Fields, Sofia, Bulgaria, 5–6 November 2009; pp. 213–223. [Google Scholar]
- Ostini, L. Analysis and Quality Assessment of GNSS-Derived Parameter Time Series. Ph.D. Thesis, Philosophisch—Naturwissenschaftlichen Fakultät of the University of Bern, Bern, Switzerland, 2012. [Google Scholar]
- Chatzinikos, M.; Dermanis, A. A Study on the Impact of Reference Frame Implementation Strategy on GNSS Time Series for Regional Network Analysis. In REFAG 2014. International Association of Geodesy Symposia; van Dam, T., Ed.; Springer: Cham, Switzerland, 2015; Volume 146. [Google Scholar]
- Altamimi, Z.; Dermanis, A. The Choice of Reference System in ITRF Formulation. In International Association of Geodesy Symposia, Proceedings of the VII Hotine-Marussi Symposium on Mathematical Geodesy, Rome, Italy, 6–10 June 2009; Sneeuw, N., Novák, P., Crespi, M., Sansò, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 329–334. [Google Scholar]
- Fowler, C.M.R. The Solid Earth: An Introduction to Global Geophysics; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- De Mets, C.R.; Gordon, R.G.; Argus, D.; Stein, S. Current plate motions. Geophs. J. Int. 1990, 101, 425–478. [Google Scholar] [CrossRef]
- Altamimi, Z.; Métivier, L.; Rebischung, P.; Rouby, H.; Collilieux, X. ITRF2014 plate motion model. Geophys. J. Int. 2017, 209, 1906–1912. [Google Scholar] [CrossRef]
- Rebischung, P.; Griffiths, J.; Ray, J.; Schmid, R.; Collilieux, X.; Garayt, B. IGS08: The IGS realization of ITRF2008. GPS Solut. 2012, 16, 483–494. [Google Scholar] [CrossRef]
- Rizos, C. Multi-constellation GNSS/RNSS from the perspective of high accuracy users in Australia. J. Spat. Sci. 2008, 53, 29–63. [Google Scholar] [CrossRef]
- International GNSS Service Current IGS Site Guidelines. Available online: http://kb.igs.org/hc/en-us/articles/202011433-Current-IGS-Site-Guidelines (accessed on 20 March 2017).
- ICSM Guideline for Continuously Operating Reference Stations—Special Publication 1; Intergovernmental Committee on Survey and Mapping (ICSM): Australia, 2014.
- Bruyninx, C.; Altamimi, Z.; Caporali, A.; Kenyeres, A.; Lidberg, M.; Stangl, G.; Torres, J.A. Guidelines for EUREF densifications. Bull. Geod. Geomat. 2010, 69, 137–147. [Google Scholar]
- Dach, R.; Lutz, S.; Walser, P.; Fridez, P. Bernese GNSS Software Version 5.2; University of Bern, Bern Open Publishing: Bern, Switzerland, 2015. [Google Scholar]
- Minster, J.B.; Jordan, T.H. Present-day plate motions. J. Geophys. Res. 1978, 83, 5331–5354. [Google Scholar] [CrossRef]
- Drewes, H. The Actual Plate Kinematic and Crustal Deformation Model APKIM2005 as Basis for a Non-Rotating ITRF. In International Association of Geodesy Symposia, Proceedings of the IAG Symposium on Geodetic Reference Frames, Munich, Germany, 9–14 October 2006; Springer: Berlin/Heidelberg, Germany, 2009; pp. 96–100. [Google Scholar]
- Chatzinikos, M. Study of the Earth’s Crust Displacements in the Area of Greece Analysing GNSS Data. Ph.D. Thesis, School of Rural and Surveying Engineering, Aristotle University of Thessaloniki, Thessaloniki, Greece, 2013. [Google Scholar]
- Blewitt, G.; Kreemer, C.; Hammond, W.C.; Goldfarb, J.M. Terrestrial reference frame NA12 for crustal deformation studies in North America. J. Geodyn. 2013, 72, 11–24. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station ID | Location | Receiver Model | Antenna Model | Supported GNSS |
|---|---|---|---|---|
| EVRY | Evrychou | Leica GRX1200+ GNSS | Leica AR25 | GPS + GLONASS |
| LARN | Larnaca | Leica GMX902 GG | Leica AT 504 GG | GPS + GLONASS |
| LEFK | Nicosia | Leica GMX902 GG | Leica AT 504 GG | GPS + GLONASS |
| LEME | Limassol | Leica GMX902 GG | Leica AT 504 GG | GPS + GLONASS |
| PAFO | Paphos | Leica GMX902 GG | Leica AT 504 GG | GPS + GLONASS |
| PARA | Paralimni | Leica GMX902 GG | Leica AT 504 GG | GPS + GLONASS |
| POLI | Polis | Leica GRX1200+ GNSS | Leica AR25 | GPS + GLONASS |
| Parameter | Setting |
|---|---|
| Basic Observable | GNSS carrier phase. Code-only for receiver clock sync and ambiguity resolution. Melbourne-Wübbena wide lane combination. |
| Elevation Cut-Off Angle | 10°, elevation-dependent weighting (cosz). |
| Data Sampling | 30 s and 180 s in final solution. |
| Modeled Observable | Ionosphere-free linear combination of double-differenced carrier phase. |
| Ground/Satellite APC calibration | Absolute Antenna Phase Center (APC) corrections (igs08.atx). |
| Tidal Displacements | IERS 2010 conventions (solid Earth tides) FES2004 conventions (ocean loading corrections) No atmospheric loading corrections |
| Orbits and Earth Rotation Parameters (ERPs) | IGS Final GPS and GLONASS orbits and ERPs |
| Ionosphere | First-order ionospheric delays eliminated by forming ionosphere-free L1/L2 linear combination. Higher-order ionospheric corrections are applied. Regional ionospheric maps were used to increase the number of resolved ambiguities in Quasi-Ionosphere Free (QIF), L5/L3 and L1/L2 ambiguity resolution. |
| Ambiguity Resolution | Ambiguities are resolved in a baseline-by-baseline mode:
|
| Troposphere | Dry GMF (prior model), estimation of hourly zenith delay corrections for each station using Wet GMF. Horizontal gradient parameter estimated each day per station (Chen-Herring) |
| Reference Frame | IGb08, no-net translation on reference station coordinates and velocities (IGb08.snx) |
| Station ID | |||
|---|---|---|---|
| EVRY | 4389846.035 | 2839909.319 | 3641645.008 |
| LARN | 4358623.310 | 2899369.048 | 3631599.949 |
| LEFK 1 | 4360035.737 | 2870860.968 | 3652605.816 |
| 4360035.736 | 2870860.987 | 3652605.816 | |
| LEME | 4403058.471 | 2862122.638 | 3607630.266 |
| NICO | 4359415.715 | 2874117.069 | 3650777.829 |
| PAFO 1 | 4427028.128 | 2812497.092 | 3617359.846 |
| 4427028.124 | 2812497.091 | 3617359.841 | |
| PARA | 4335378.631 | 2922300.281 | 3641064.127 |
| POLI | 4413130.062 | 2803627.159 | 3640911.041 |
| Station ID | |||
|---|---|---|---|
| EVRY | 14.7 | 19.5 | 0.2 |
| LARN | 13.6 | 20.2 | −4.9 |
| LEFK 1 | 16.3 | 19.3 | 0.1 |
| 16.4 | 19.3 | 0.2 | |
| LEME | 15.6 | 20.3 | 0.3 |
| NICO | 15.7 | 18.9 | −0.3 |
| PAFO 1 | 16.1 | 19.6 | 1.7 |
| 15.9 | 19.7 | 1.6 | |
| PARA | 17.2 | 18.9 | 0.6 |
| POLI | 14.2 | 19.1 | −0.4 |
| Φ [deg] | Λ [deg] | ω [deg/Myear] |
|---|---|---|
| 49.83 ± 33.98 | 13.19 ± 15.30 | 0.629 ± 0.036 |
| Φ [deg] | Λ [deg] | ω [deg/Myear] | |
|---|---|---|---|
| Anatolia | 40.0 ± 0.2 | 28.3 ± 0.4 | 2.021 ± 0.137 |
| Arabian | 49.5 ± 0.8 | 4.8 ± 3.3 | 0.596 ± 0.029 |
| African | 49.3 ± 0.4 | 280.5 ± 1.0 | 0.273 ± 0.002 |
| Eurasia | 54.5 ± 0.4 | 262.9 ± 0.5 | 0.258 ± 0.001 |
| Anatolia | Arabian | African | Eurasia | |
|---|---|---|---|---|
| North component | ||||
| Mean | 0.7 | −5.1 | −2.9 | 2.7 |
| RMS | 1.6 | 5.2 | 3.1 | 3.0 |
| East component | ||||
| Mean | −0.3 | 0.0 | −3.7 | −5.8 |
| RMS | 0.9 | 0.7 | 3.8 | 5.8 |
| Station ID | Amplitude [mm] | Phase [deg] | ||||
|---|---|---|---|---|---|---|
| North | East | Up | North | East | Up | |
| EVRY | 3.2 | 3.0 | 3.2 | 114.5 | 80.9 | 74.0 |
| LARN | 2.3 | 2.1 | 3.1 | 253.0 | 62.2 | 71.9 |
| LEFK | 2.7 | 1.3 | 2.4 | 259.5 | 344.9 | 80.6 |
| LEME | 2.1 | 0.6 | 4.1 | 45.2 | 190.0 | 244.8 |
| PAFO | 2.3 | 1.2 | 2.2 | 211.6 | 49.0 | 109.0 |
| PARA | 1.7 | 1.3 | 2.3 | 233.0 | 59.9 | 78.8 |
| POLI | 2.0 | 1.4 | 2.9 | 212.7 | 22.2 | 79.4 |
| Station ID | GNSS-Based | Total Loading | ||||
|---|---|---|---|---|---|---|
| North | East | Up | North | East | Up | |
| EVRY | 2.9 | 2.7 | 4.9 | 0.7 | 0.5 | 3.3 |
| LARN | 2.0 | 1.7 | 4.3 | 0.7 | 0.5 | 3.3 |
| LEFK | 2.4 | 1.5 | 4.1 | 0.7 | 0.5 | 3.3 |
| PAFO | 2.0 | 1.7 | 3.9 | 0.8 | 0.5 | 3.2 |
| PARA | 1.5 | 1.4 | 4.0 | 0.7 | 0.5 | 3.3 |
| POLI | 1.8 | 1.9 | 4.7 | 0.7 | 0.5 | 3.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Danezis, C.; Chatzinikos, M.; Kotsakis, C. Linear and Nonlinear Deformation Effects in the Permanent GNSS Network of Cyprus. Sensors 2020, 20, 1768. https://doi.org/10.3390/s20061768
Danezis C, Chatzinikos M, Kotsakis C. Linear and Nonlinear Deformation Effects in the Permanent GNSS Network of Cyprus. Sensors. 2020; 20(6):1768. https://doi.org/10.3390/s20061768
Chicago/Turabian StyleDanezis, Chris, Miltiadis Chatzinikos, and Christopher Kotsakis. 2020. "Linear and Nonlinear Deformation Effects in the Permanent GNSS Network of Cyprus" Sensors 20, no. 6: 1768. https://doi.org/10.3390/s20061768
APA StyleDanezis, C., Chatzinikos, M., & Kotsakis, C. (2020). Linear and Nonlinear Deformation Effects in the Permanent GNSS Network of Cyprus. Sensors, 20(6), 1768. https://doi.org/10.3390/s20061768