Design of a Carrier Wave for Capacitive Transducer with Large Dynamic Range


Abstract
1. Introduction
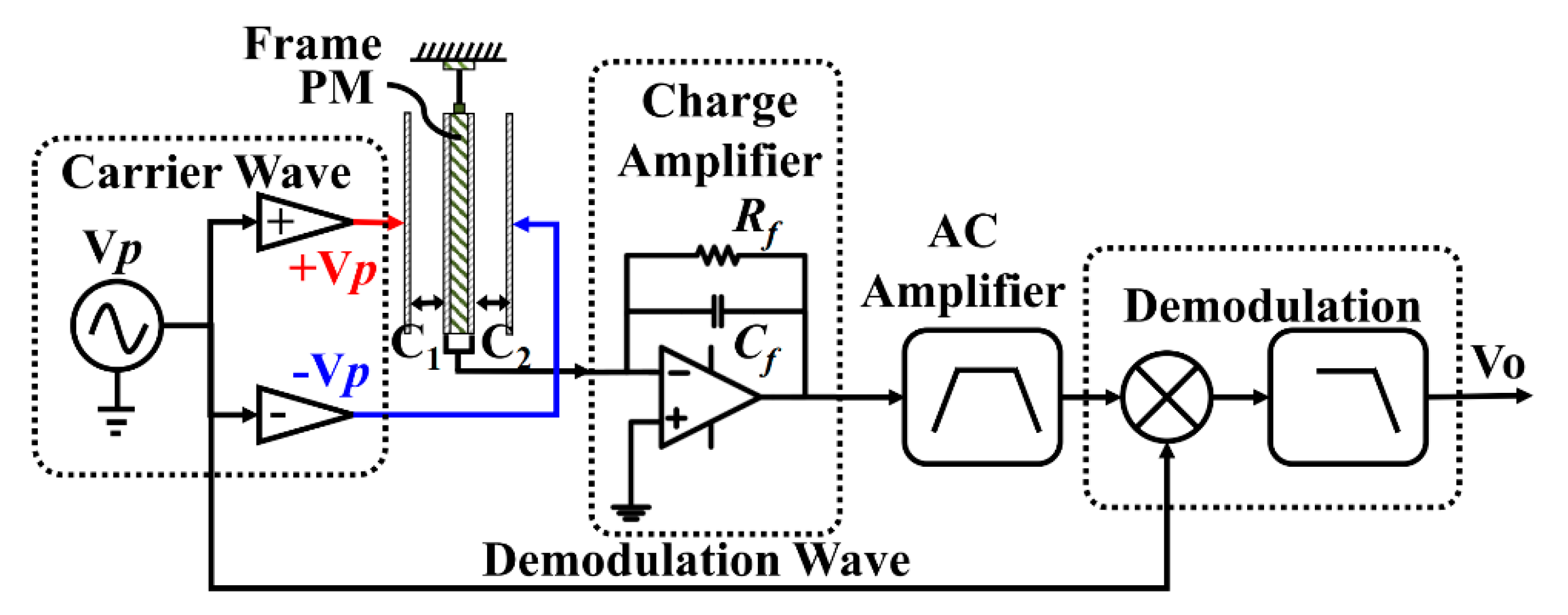
2. Principle of Capacitive Transducers
3. Noise Analysis and Design of Large-Dynamic-Range Carrier Wave
3.1. Noise Analysis of the Capacitive Transducer
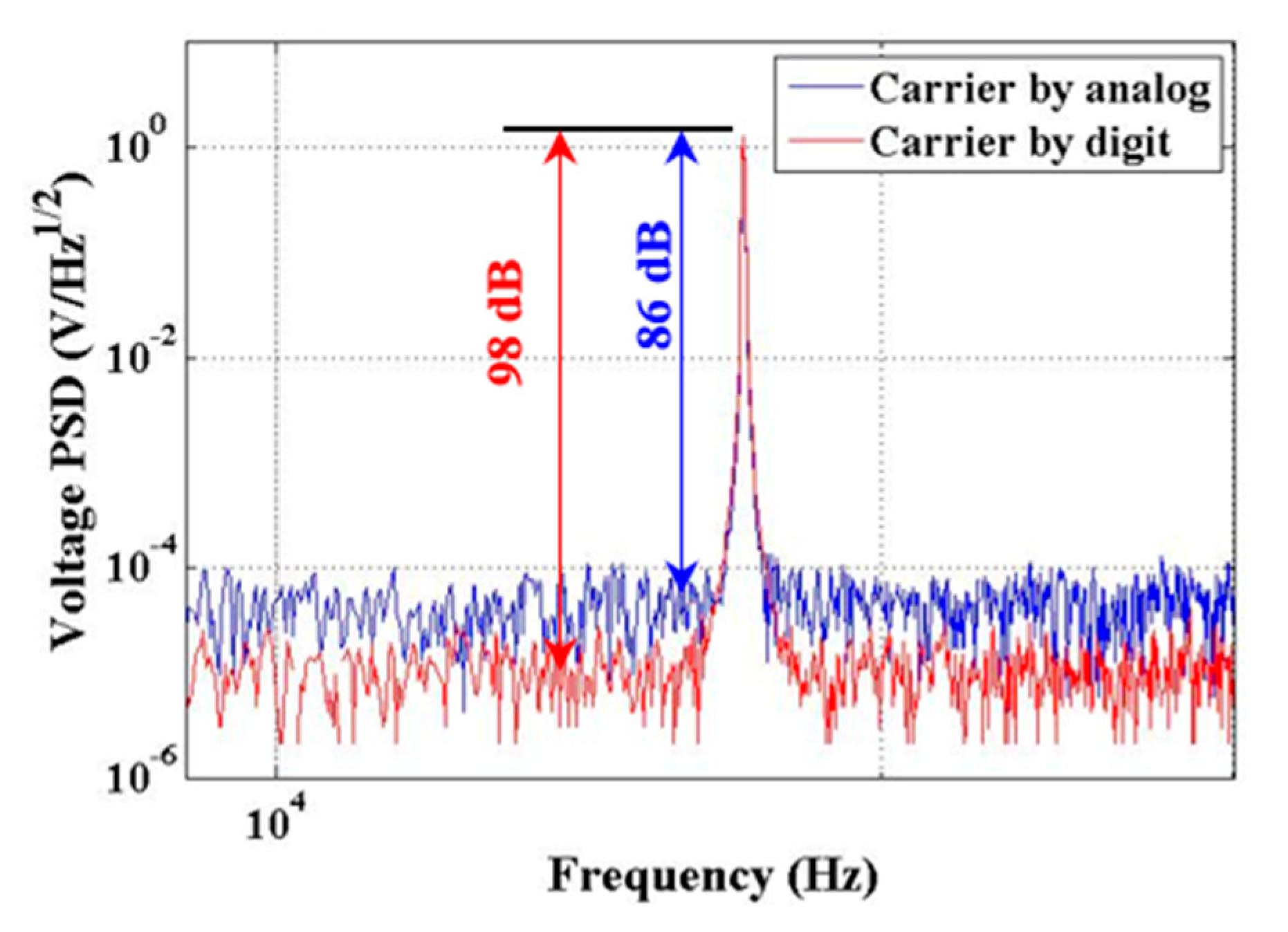
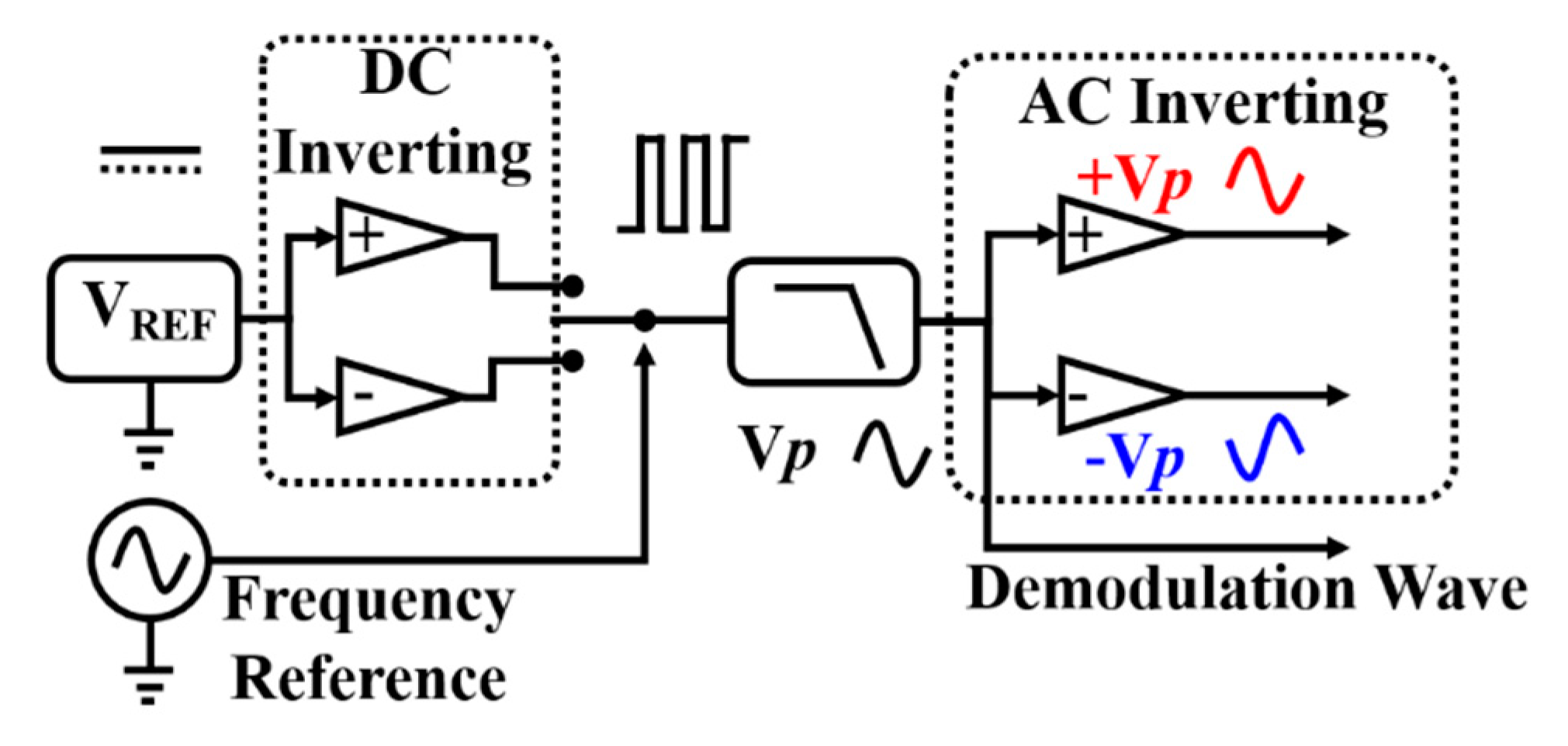
3.2. Design of Large-Dynamic-Range Carrier Wave
4. Experimental Results
5. Conclusions and Future Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Jones, R.V.; Richards, J. The design and some applications of sensitive capacitance micrometers. J. Phys. E Sci. Instrum. 1973, 6, 589–600. [Google Scholar] [CrossRef]
- Baxter, L.K. Capacitive Sensors: Design and Applications; Herrick, R.J., Ed.; IEEE: New York, NY, USA, 1997. [Google Scholar]
- Touboul, P.; Foulon, B.; Willemenot, E. Electrostatic space accelerometers for present and future missions. Acta Astronaut. 1999, 45, 605–617. [Google Scholar] [CrossRef]
- Touboul, P.; Willemenot, E. Accelerometers for CHAMP, GRACE and GOCE space missions: Synergy and evolution. Bollett. Geofis. Teor. Appl. 1999, 40, 321–327. [Google Scholar]
- Josselin, V.; Touboul, P.; Kielbasa, R. Capacitive detection scheme for space accelerometers applications. Sens. Actuators A 1999, 78, 92–98. [Google Scholar] [CrossRef]
- Sumner, T.J.; Anderson, J.; Blaser, J.P.; Cruise, A.M.; Damour, T.; Dittus, H.; Everitt, C.W.F.; Foulon, B.; Jafry, Y.; Kent, B.J.; et al. STEP (satellite test of the equivalence principle). Adv. Space Res. 2007, 39, 254–258. [Google Scholar] [CrossRef]
- Zhou, Z.B.; Dong, Y.J.; Tian, Y.L.; Qin, D.; Luo, J. Excitation frequency effect of differential capacitance transducer for equivalence principle test. Chin. Phys. Lett. 2004, 21, 1208. [Google Scholar]
- Cavalleri, A.; Dolesi, R.; Fontana, G. Progress in the development of a position sensor for LISA drag-free control. Class. Quantum Grav. 2001, 18, 4133–4144. [Google Scholar] [CrossRef]
- Weber, W.J.; Cavalleri, A.; Dolesi, R.; Fontana, G.; Vitale, S. Position sensors for LISA drag-free control. Class. Quantum Grav. 2002, 19, 1751. [Google Scholar] [CrossRef]
- Gan, L.; Mance, D.; Zweifel, P. LTP is FEE sensing channel: Front-end modeling and symmetry adjustment method. IEEE Sens. J. 2012, 12, 1071–1077. [Google Scholar] [CrossRef]
- Weber, W.J.; Bortoluzzi, D.; Carbone, L.; da Lio, M.; Dolesi, R. Position sensors for flight testing of LISA drag-free control. Proc. SPIE-ISOP 2003, 4856, 31–42. [Google Scholar]
- Yan, S.T.; Xie, Y.F.; Deng, Z.G. A subnano-g electrostatic force-rebalanced flexure accelerometer for gravity gradient instruments. Sensors 2017, 17, 2669. [Google Scholar] [CrossRef] [PubMed]
- Wu, W.J.; Liu, J.Q.; Tu, L.C. A nano-g micromachined seismic sensor for levelling-free measurements. Sens. Actuators A Phys. 2018, 280, 238–244. [Google Scholar] [CrossRef]
- Lee, J.B. FALCON gravity gradiometer technology. Explor. Geophys. 2001, 32, 247–250. [Google Scholar] [CrossRef]
- Metzger, E.H. Recent gravity gradiometer developments. Am. Inst. Astronaut. Aeronaut. 1977, 1081, 306–315. [Google Scholar]
- Huang, X.Q.; Deng, Z.G.; Xie, Y.F. A new scale factor adjustment method for magnetic force feedback accelerometer. Sensors 2017, 17, 2471. [Google Scholar] [CrossRef] [PubMed]
- Armano, M. Capacitive sensing of test mass motion with nanometer precision over millimeter-wide sensing gaps for space-borne gravitational reference sensors. Phys. Rev. D 2017, 96, 062004. [Google Scholar] [CrossRef]
- Hu, M.; Bai, Y.Z.; Zhou, Z.B.; Li, Z.X.; Luo, J. Resonant frequency detection and adjustment method for a capacitive transducer with differential transformer bridge. Rev. Sci. Instrum. 2014, 85, 055001. [Google Scholar] [CrossRef] [PubMed]
- Wu, W.J.; Liu, D.D.; Tu, L.C. A precise spacing-control method in MEMS packaging for capacitive accelerometer applications. J. Micromech. Microeng. 2018, 28, 125016. [Google Scholar] [CrossRef]
- Bertolini, A.; DeSalvo, R.; Fidecaro, F.; Francesconi, M.; Marka, K.; Sannibale, V. Readout system and predicted performance of a low-noise low-frequency horizontal accelerometer. Nucl. Instrum. Methods Phys. Res. A 2006, 564, 579–586. [Google Scholar] [CrossRef]
- Bai, Y.Z.; Zhou, Z.B.; Tu, H.B. Capacitive position measurement for high-precision space inertial sensor. Front. Phys. China 2009, 4, 205–208. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Circuit Units | Gain |
|---|---|
| Charge amplifier | 5 V/pF |
| AC amplifier (GAC) | 0.4 |
| Multiplier (GM) | 4/π |
| Low-pass filter (GLP) | 1 |
| Circuit Units | Noise at the End of Circuit |
|---|---|
| Charge amplifier | 76 nV/Hz1/2 |
| AC amplifier | 189 nV/Hz1/2 |
| Multiplier | 2 μV/Hz1/2 |
| Low-pass filter | 200 nV/Hz1/2 |
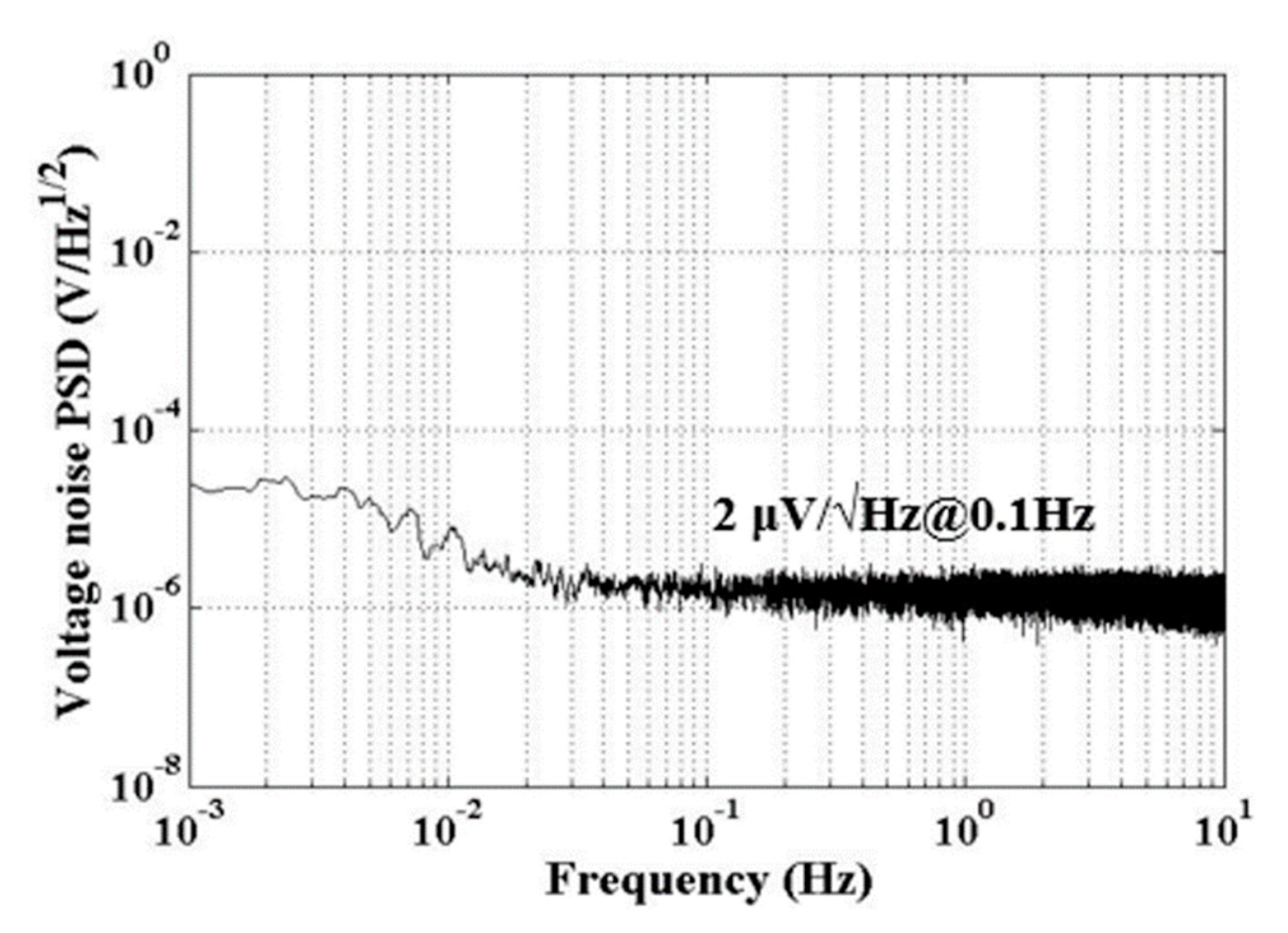
| Total noise | 2.02 μV/Hz1/2 |
| Circuit Units | Noise at the End of Circuit |
|---|---|
| Voltage reference | Limited by components |
| DC inverting circuit | 200 nV/Hz1/2 |
| Filter | 27 nV/Hz1/2 |
| AC inverting circuit | 15 nV/Hz1/2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhang, X.; Zou, S.; Huang, X.; Xue, C.; Liu, J.; Liu, Q.; Yang, S.; Tu, L. Design of a Carrier Wave for Capacitive Transducer with Large Dynamic Range. Sensors 2020, 20, 992. https://doi.org/10.3390/s20040992
Li Z, Zhang X, Zou S, Huang X, Xue C, Liu J, Liu Q, Yang S, Tu L. Design of a Carrier Wave for Capacitive Transducer with Large Dynamic Range. Sensors. 2020; 20(4):992. https://doi.org/10.3390/s20040992
Chicago/Turabian StyleLi, Zhu, Xian Zhang, Shu Zou, Xiangqing Huang, Chao Xue, Jianping Liu, Qi Liu, Shanqing Yang, and Liangcheng Tu. 2020. "Design of a Carrier Wave for Capacitive Transducer with Large Dynamic Range" Sensors 20, no. 4: 992. https://doi.org/10.3390/s20040992
APA StyleLi, Z., Zhang, X., Zou, S., Huang, X., Xue, C., Liu, J., Liu, Q., Yang, S., & Tu, L. (2020). Design of a Carrier Wave for Capacitive Transducer with Large Dynamic Range. Sensors, 20(4), 992. https://doi.org/10.3390/s20040992