Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks


Abstract
1. Introduction
2. Introduction to Detection Robot
2.1. Magnetic Wheel
2.1.1. Structural Design of the Magnetic Wheel
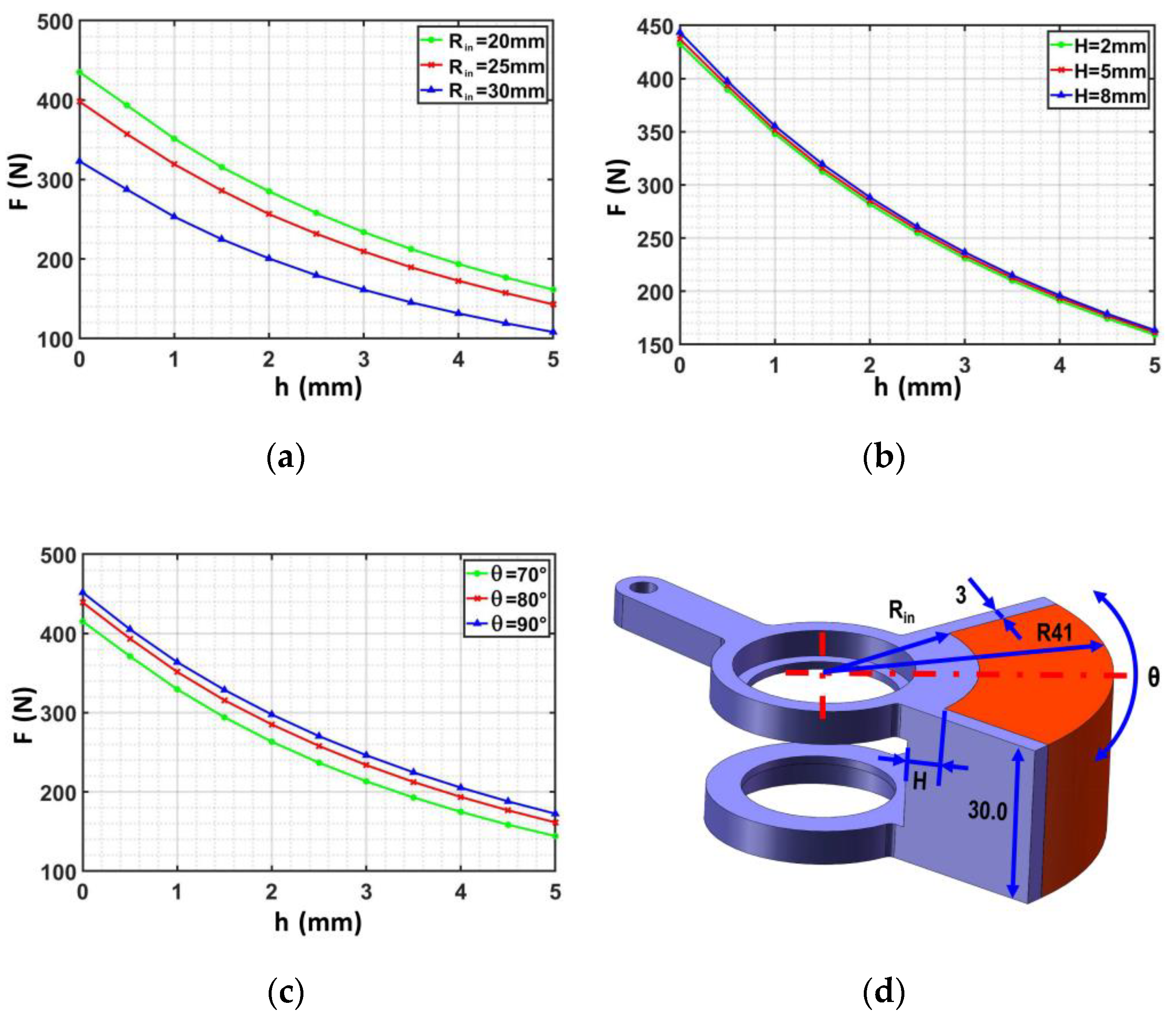
2.1.2. Optimization of Magnetic Wheel
2.2. Passive Adaptive Moving Mechanism
2.3. Detection Mechanism
3. Mechanical Analysis
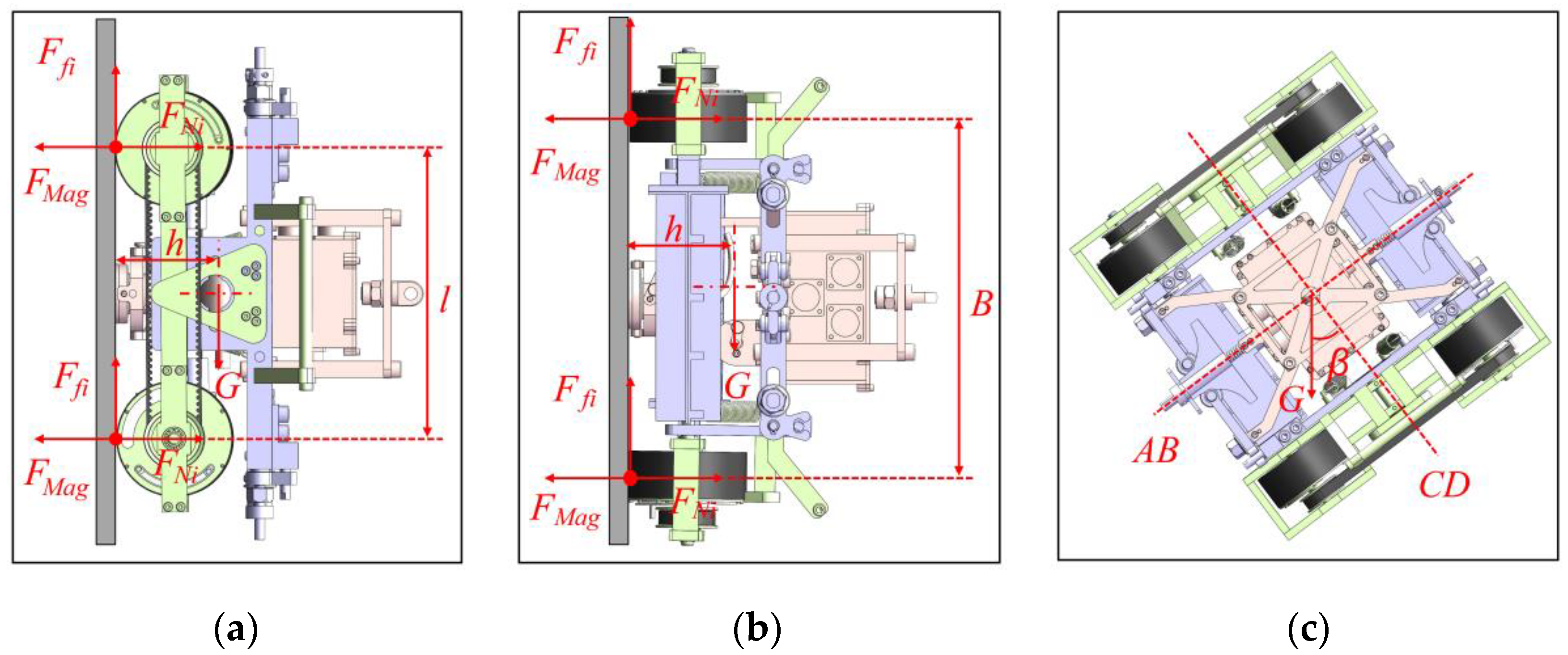
3.1. Statics Analysis
3.2. Dynamics Analysis
3.2.1. Dynamic Analysis in the Vertical Upward Movement
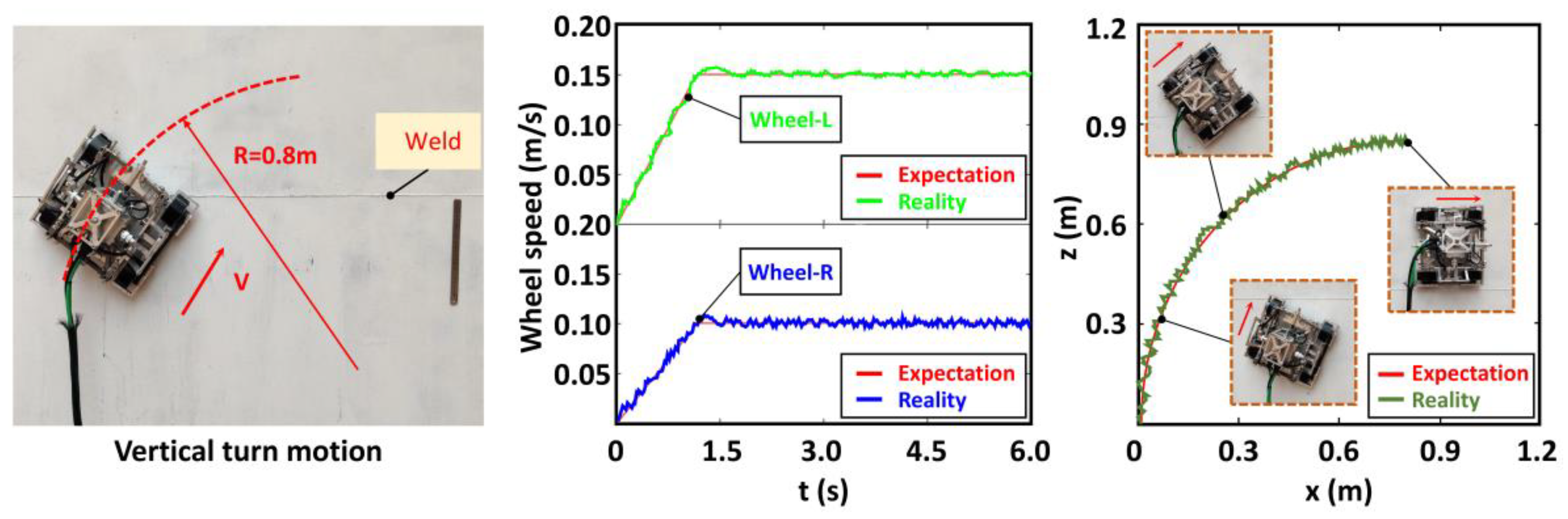
3.2.2. Dynamic Analysis in Steering
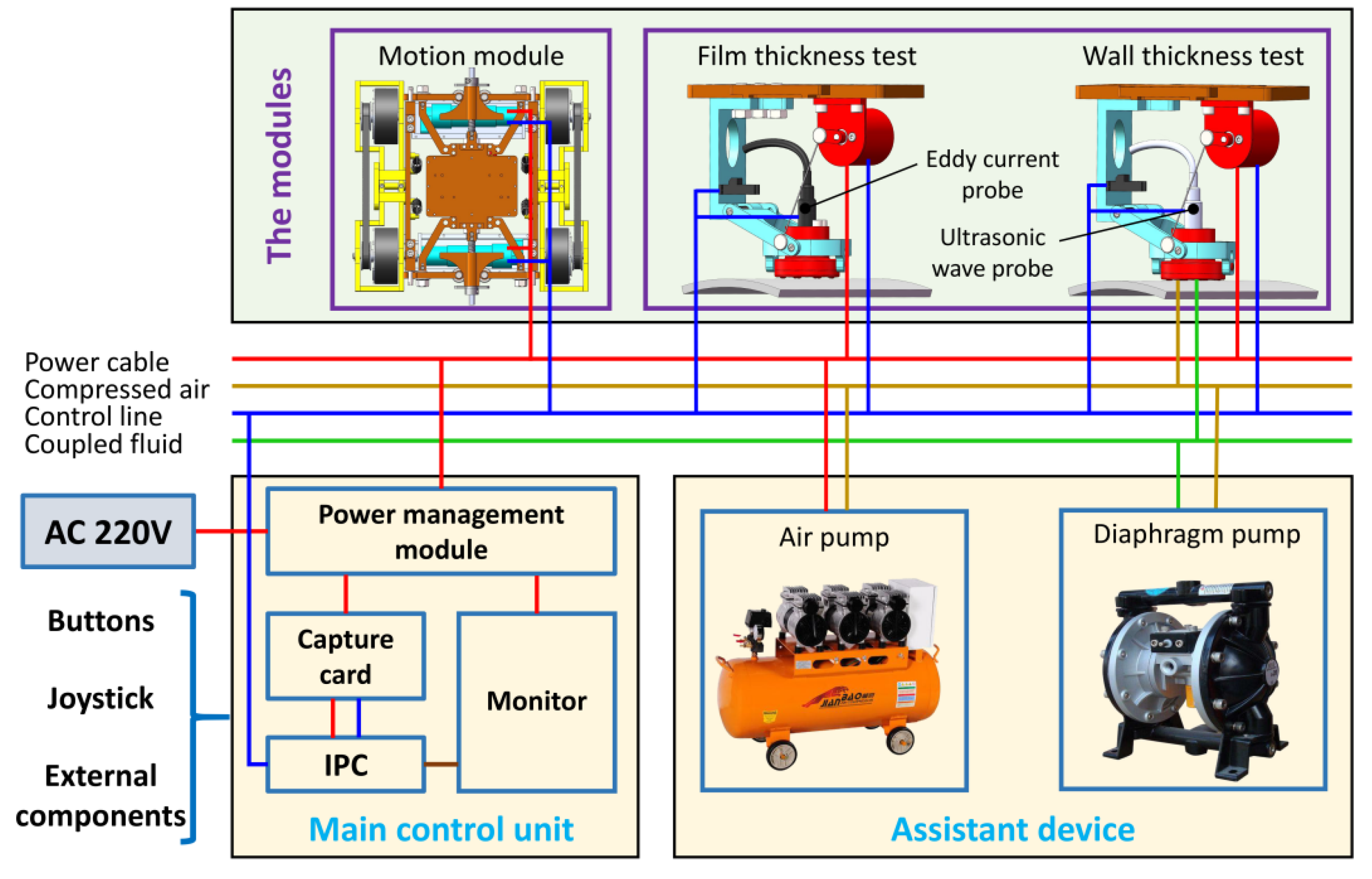
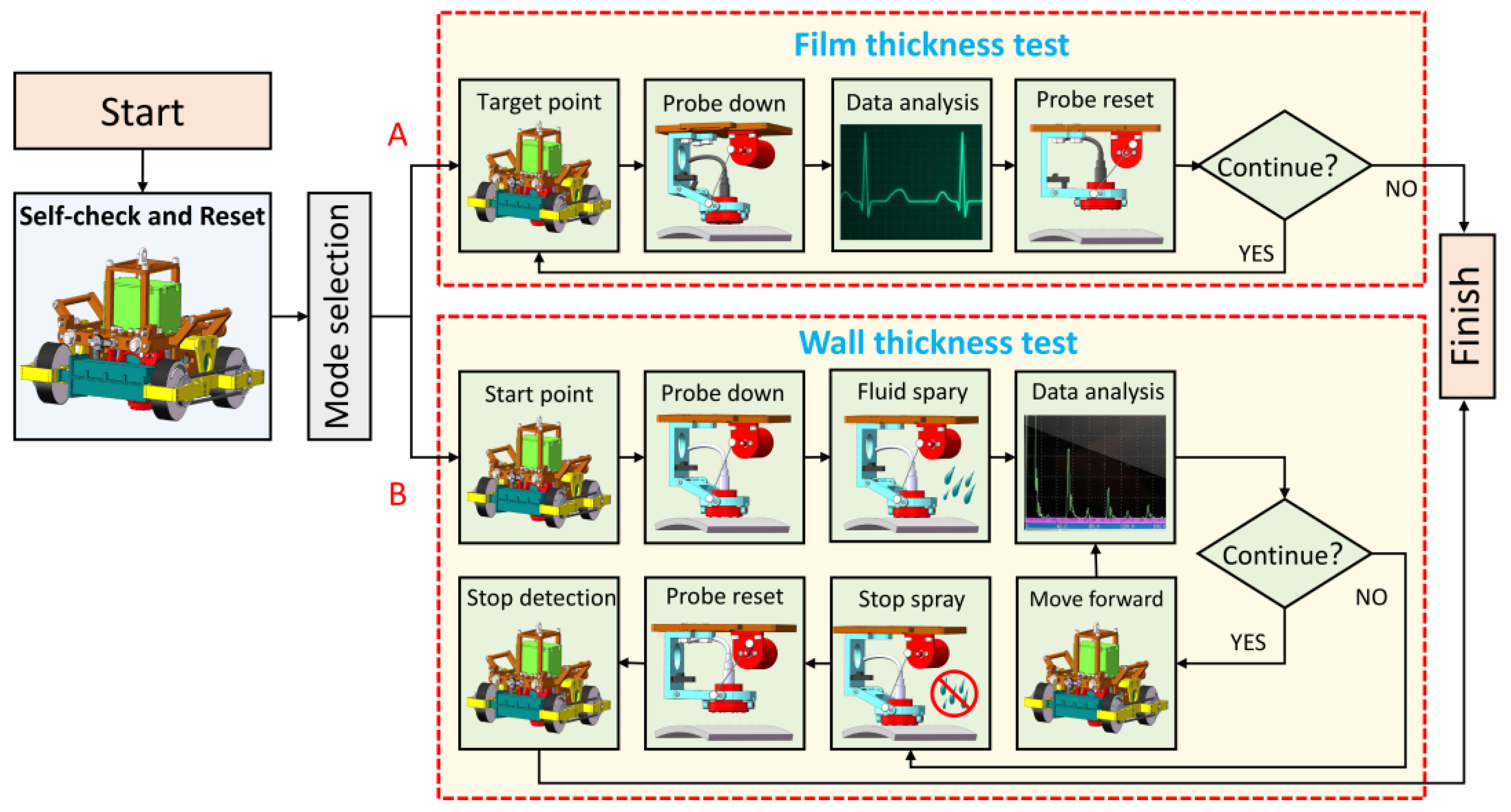
4. Control System
- The robot is powered on to perform self-check and reset.
- The user selects the detection mode:
- A:
- Film thickness detection.
- B:
- Wall thickness detection.
- Different detection modes enter different detection processes:
- A:
- Film thickness detection:
- (1)
- The motors are driven to help the robot reach the initial detection point.
- (2)
- After the robot reaches the predetermined position, the DC motor in the flexible detection mechanism rotates forward to lower the detection probe. The probe cooperates with its passive adaptation mechanism to realize the vertical alignment of the probe.
- (3)
- After the sensor in the flexible detection mechanism confirms the detection position, the probe collects the paint film thickness information and transmits it back to the main control unit.
- (4)
- The DC motor reverses to lift the probe, and the robot completes the current position detection.
- (5)
- The main control unit checks the presence of a termination signal: if no termination signal is present, then the robot moves to the next detection point and repeat steps 2–5; if the termination signal is obtained, then the detection task is stopped.
- B:
- Wall thickness detection:
- (1)
- Motors re driven to help the robot reach the initial detection point.
- (2)
- After the robot reaches the predetermined position, the DC motor in the flexible detection mechanism rotates forward to lower the detection probe. The probe cooperates with its passive adaptation mechanism to realize the vertical alignment of the probe.
- (3)
- The diaphragm pump sprays coupling fluid on the detection area to assist the detection task.
- (4)
- The probe collects wall thickness information and returns it to the main control unit.
- (5)
- The main control unit checks the presence of a termination signal: if no termination signal is present, then the robot continues to run and repeat steps 3–5; if a termination signal is obtained, then the diaphragm pump stops spraying coupling fluid and the DC motor reverses to lift the probe to stop the detection task.
- The robot completes the detection task and resets.
5. Experiment
5.1. Movement Performance Test
5.2. Detection Accuracy Test
6. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cao, J.C. Risk Control of petrochemical storage Tanks. Labor Prot. 2015, 8, 104–106. [Google Scholar]
- Zhou, J.; Liu, Z.X.; Dai, E.Q.; Zhang, G.M. Brief analysis on maintenance standards and management system of large storage tanks. China Pet. Chem. Ind. Stand. Qual. 2012, 33, 11. [Google Scholar]
- Huang, H.W. Risk analysis and safety pre-evaluation of scaffold erection and removal. China Sci. Technol. Prod. Saf. 2017, 13, 36–41. [Google Scholar]
- Zdravkov, L.; Pantusheva, M. Typical damage in steel storage tanks in operation. Procedia Struct. Integr. 2019, 22, 291–298. [Google Scholar] [CrossRef]
- Li, H.Q.; Yang, Z.P.; Zhang, X.H.; Zhang, X.Z.; Li, Z.Y. Cleaning and maintenance of naphtala tanks. Petrochem. Corros. Prot. 2013, 30, 11–23. [Google Scholar]
- Sattar, T.; Corsar, M.; James, R.; Seghier, D. Robotics Transforming the Future. In Proceedings of the 21st International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Panama City, Panama, 10–12 September 2018; pp. 222–229. [Google Scholar]
- Gao, F.; Fan, J.; Zhang, L.; Jiang, J.; He, S. Magnetic crawler climbing detection robot basing on metal magnetic memory testing technology. Robot. Auton. Syst. 2020, 125, 103439. [Google Scholar] [CrossRef]
- Chen, X.; Wu, Y.; Hao, H.; Shi, H.; Huang, H. Tracked Wall-Climbing Robot for Calibration of Large Vertical Metal Tanks. Appl. Sci. 2019, 9, 2671. [Google Scholar] [CrossRef]
- Abdulkader, R.E.; Veerajagadheswar, P.; Htet Lin, N.; Kumaran, S.; Vishaal, S.R.; Mohan, R.E. Sparrow: A Magnetic Climbing Robot for Autonomous Thickness Measurement in Ship Hull Maintenance. J. Mar. Sci. Eng. 2020, 8, 469. [Google Scholar] [CrossRef]
- Gao, F.; Lin, J.; Ge, Y.; Lu, S.; Zhang, Y. A Mechanism and Method of Leak Detection for Pressure Vessel: Whether, When, and How. IEEE Trans. Instrum. Meas. 2020, 69, 6004–6015. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, W. A Worm-Inspired Robot Flexibly Steering on Horizontal and Vertical Surfaces. Appl. Sci. 2019, 9, 2168. [Google Scholar] [CrossRef]
- Powelson, M.W.; Demirjian, W.A.; Canfield, S.L. Integrating Dry Adhesives and Compliant Suspension for Track-Type Climbing Robots. In Proceedings of the ASME 2019 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019. [Google Scholar]
- Xie, C.; Wu, X.; Wang, X. A Three-row Opposed Gripping Mechanism with Bioinspired Spiny Toes for Wall-climbing Robots. J. Bionic Eng. 2019, 16, 994–1006. [Google Scholar] [CrossRef]
- Shao, J.; Li, X.; Zong, C.; Guo, W.; Bai, Y.; Dai, F.; Gao, X. A Wall-Climbing Robot with Gecko Features. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 942–947. [Google Scholar]
- Yoshida, Y.; Ma, S. A Wall-Climbing Robot without Any Active Suction Mechanisms. In Proceedings of the 2011 IEEE International Conference on Robotics and Biomimetics, Karon Beach, Phuket, Thailand, 7–11 December 2011; pp. 2014–2019. [Google Scholar]
- Zhou, Q.; Li, X. Experimental investigation on climbing robot using rotation-flow adsorption unit. Robot. Auton. Syst. 2018, 105, 112–120. [Google Scholar] [CrossRef]
- Koh, K.H.; Sreekumar, M.; Ponnambalam, S.; Ponnambalam, S.G. Hybrid electrostatic and elastomer adhesion mechanism for wall climbing robot. Mechatronics 2016, 35, 122–135. [Google Scholar] [CrossRef]
- Navaprakash, N.; Ramachandraiah, U.; Muthukumaran, G.; Rakesh, V.; Singh, A.P. Modeling and Experimental Analysis of Suction Pressure Generated by Active Suction Chamber Based Wall Climbing Robot with a Novel Bottom Restrictor. Procedia Comput. Sci. 2018, 133, 847–854. [Google Scholar] [CrossRef]
- Chen, N.; Shi, K.; Li, X. Theoretical and Experimental Study and Design Method of Blade Height of a Rotational-Flow Suction Unit in a Wall-Climbing Robot. J. Mech. Robot. 2020, 12, 1–17. [Google Scholar] [CrossRef]
- Demirjian, W.; Powelson, M.W.; Canfield, S.L. Design of Track-Type Climbing Robots Using Dry Adhesives and Compliant Suspension for Scalable Payloads. J. Mech. Robot. 2020, 12, 1–25. [Google Scholar] [CrossRef]
- Seriani, S.; Scalera, L.; Caruso, M.; Gasparetto, A.; Gallina, P. Upside-Down Robots: Modeling and Experimental Validation of Magnetic-Adhesion Mobile Systems. Robotics 2019, 8, 41. [Google Scholar] [CrossRef]
- Wang, J.D.; Xin, J.X.; Sun, A.Q.; Liang, M.X. Design and Optimization of permanent magnet wheel adsorption Device for wall climbing robot based on ANSYS. Sci. Technol. Eng. 2020, 20, 6931–6937. [Google Scholar]
- Wen, J. Design and Characteristics of Tank Wall Crawling Robot. Ph.D. Thesis, Shanghai Jiao Tong University, Shang Hai, China, 2011. [Google Scholar]
- Eto, H.; Asada, H.H. Development of a Wheeled Wall-Climbing Robot with a Shape-Adaptive Magnetic Adhesion Mechanism. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9329–9335. [Google Scholar]
- Xiao, R.H.; Cheng, Y.X.; Jiang, Z.Z.; Zhang, R.J.; Wei, W. Design of robot adsorption mechanism for rust removal and wall-climbing on oil tank inner wall. Mach. Des. 2019, 36, 21–26. [Google Scholar]
- Fan, J.; Xu, T.; Fang, Q.; Zhao, J.; Zhu, Y. A Novel Style Design of a Permanent-Magnetic Adsorption Mechanism for a Wall-Climbing Robot. J. Mech. Robot. 2020, 12, 1–30. [Google Scholar] [CrossRef]
- Amirpasha, P.; Parviz, S.; Lu, J. A New Self-Loading Locomotion Mechanism for Wall Climbing Robots Employing Biomimetic Adhesives. J. Bionic Eng. 2013, 10, 12–18. [Google Scholar]
- Wang, B.R.; Feng, W.B.; Luo, H.H.; Jin, Y.L.; Wu, S.Q. Design and stability analysis of bipedal three-degree-of-freedom wall-climbing robot on curved surface. Robotics 2014, 36, 349–354. [Google Scholar]
- Huang, H.; Li, D.; Xue, Z.; Chen, X.; Liu, S.; Leng, J.; Wei, Y. Design and performance analysis of a tracked wall-climbing robot for ship inspection in shipbuilding. Ocean. Eng. 2017, 131, 224–230. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, Y.; Gui, H.; Li, D.; Li, Z. Identification of the deviation of seam tracking and weld cross type for the derusting of ship hulls using a wall-climbing robot based on three-line laser structural light. J. Manuf. Process. 2018, 35, 295–306. [Google Scholar] [CrossRef]
- Zhang, F.; Sun, X.; Li, Z.; Mohsin, I.; Wei, Y.; He, K. Influence of Processing Parameters on Coating Removal for High Pressure Water Jet Technology Based on Wall-Climbing Robot. Appl. Sci. 2020, 10, 1862. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, K.; Chen, Y.; Luo, Z.; Zheng, J. A real-time weld line detection for derusting wall-climbing robot using dual cameras. J. Manuf. Process. 2017, 27, 76–86. [Google Scholar] [CrossRef]
- Vishaal, R.; Raghavan, P.; Rajesh, R.; Michael, S.; Elara, M.R. Design of Dual Purpose Cleaning Robot. Procedia Comput. Sci. 2018, 133, 518–525. [Google Scholar] [CrossRef]
- Zhang, L.X.; Ji, W.G.; Li, T.X. Research on the Walking Control of the Pipeline Automatic Welding Trolley. Weld. Technol. 2016, 44, 69–70. [Google Scholar]
- Chen, Y.; Mei, T.; Wang, X.J.; Li, F.; Liu, Y.W. Image detection and classification of bridge cracks based on wall-climbing robot. J. Univ. Sci. Technol. China 2016, 46, 788–796. [Google Scholar]
- Cao, L.C.; Liu, X.G.; Jiang, X.M.; Zhang, H.; Wang, Z.M. Research on vertical welding technology of EH36 Marine high strength steel based on wall-climbing robot. Precis. Form. Eng. 2020, 12, 94–99. [Google Scholar]
- Zhang, X.; Zhang, X.; Zhang, M.; Sun, L.; Li, M. Optimization Design and Flexible Detection Method of Wall-Climbing Robot System with Multiple Sensors Integration for Magnetic Particle Testing. Sensors 2020, 20, 4582. [Google Scholar] [CrossRef] [PubMed]
- Mizota, Y.; Goto, Y.; Nakamura, T. Development of a Wall Climbing Robot Using the Mobile Mechanism of Continuous Traveling Waves Propagation Development of a Mechanism of Wave-Absorbing. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 1508–1513. [Google Scholar]
- Wu, M.H. Research on Wheelfoot Non-Contact Magnetic Adsorption Wall-Climbing Robot for Welding Task. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 2014. [Google Scholar]
- Zhang, L.; Ke, W.; Ye, Q.; Jiao, J. A novel laser vision sensor for weld line detection on wall-climbing robot. Opt. Laser Technol. 2014, 60, 69–79. [Google Scholar] [CrossRef]
- Dian, S.; Fang, H.; Zhao, T.; Wu, Q.; Hu, Y.; Guo, R.; Li, S. Modeling and Trajectory Tracking Control for Magnetic Wheeled Mobile Robots Based on Improved Dual-Heuristic Dynamic Programming. IEEE Trans. Ind. Inform. 2020, 99, 1. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variate | Inner Radius (mm) | Angle of Magnet (°) | Yoke Iron Height (mm) |
|---|---|---|---|
| Before optimization | 25 | 70 | 6 |
| After optimization | 20 | 80 | 5 |
| Times | Horizontal | Vertical | Oblique |
|---|---|---|---|
| First time | 121 N | 124 N | 120 N |
| Second time | 119 N | 122 N | 123 N |
| Third time | 123 N | 129 N | 123 N |
| Symbol | Comment | Symbol | Comment |
|---|---|---|---|
| Friction of the robot | Weight force of the robot | ||
| Support force of the wheel | Safety parameter | ||
| Adsorption of the wheel | Static friction coefficient | ||
| Length of robot | Width of robot | ||
| Angular velocity of turning state | Centroid height of the robot |
| Symbol | Comment | Symbol | Comment |
|---|---|---|---|
| Velocity of the center of mass | Velocity of the left two wheels | ||
| Velocity of the right two wheels | Radius of magnetic wheel | ||
| Radius of gyration | Angular acceleration of robot | ||
| Moment of resistance of wheel | Motor output torque |
| Items | Parameters |
|---|---|
| Weight | 11 kg |
| Load capacity | 9 kg |
| Maximum speed | 10 m/min |
| Boundary dimension | 400 × 400 × 300 mm |
| Communication mode | Wired (RS485) |
| Detection modes | Film/Wall thickness detection |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Zhang, X.; Li, M.; Cao, J.; Huang, Z. Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks. Sensors 2020, 20, 6651. https://doi.org/10.3390/s20226651
Zhang M, Zhang X, Li M, Cao J, Huang Z. Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks. Sensors. 2020; 20(22):6651. https://doi.org/10.3390/s20226651
Chicago/Turabian StyleZhang, Minglu, Xuan Zhang, Manhong Li, Jian Cao, and Zhexuan Huang. 2020. "Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks" Sensors 20, no. 22: 6651. https://doi.org/10.3390/s20226651
APA StyleZhang, M., Zhang, X., Li, M., Cao, J., & Huang, Z. (2020). Optimization Design and Flexible Detection Method of a Surface Adaptation Wall-Climbing Robot with Multisensor Integration for Petrochemical Tanks. Sensors, 20(22), 6651. https://doi.org/10.3390/s20226651