1. Introduction
People over the age of 45 years experience foot pain regularly, and about two-third of these are at least mild impairment in any aspect of their foot conditions related to activities in their daily lives [
1]. In such cases, foot biomechanics play an important role in the development and progression of foot pain during daily tasks, including walking. Moreover, Menz et al. [
2] stated that a pronated foot significantly increased the probability of the development of generalized foot and heel pains. Foot supination occurs when body weight falls on the outer edges of the feet, while overpronation occurs when the foot falls more inward or downward [
3]. Those who have the supination and overpronation too frequently are at high risk of developing foot disorders and symptoms including ankle and feet pain, plantar fasciitis, foot fatigue, etc. [
2]. Additionally, these conditions might worsen during walking, running or standing for a long time.
Automatic detecting approaches of these abnormalities in early stage could correct the walk posture and avoid further injuries, one of which is gait analysis. Gait analysis is conducted as an efficient clinical method for a wide variety of applications such as neurological diseases assessment [
4,
5,
6], prevention of falling accidents [
7,
8,
9], orthopedic disorder diagnosis [
10,
11,
12] and enhancement in recovery process after knee or leg related surgery on post-surgical patients [
13,
14]. The gait analysis is typically conducted in a specific clinical laboratory using pressure mats or vision-based equipment. This setting of the gait experiment in such a clinical laboratory has two disadvantages. Firstly, building the specific clinical laboratory with all the equipment is costly. Secondly, walking on the pressure mat hinders participants from walking naturally, and thus the experiments cannot record the real gait patterns [
15]. Hence, this type of experiment is not suitable for the gait analysis which is supposed to be conducted in sufficient and comfortable environment in order for participants to walk naturally. For its accurate analysis, the experiment data are recorded during a long walking most critically under unregulated conditions.
In recent years, several works have been published to develop wearable systems in order to assess the gait patterns using different types of sensors or combination of them, such as electromyography sensors [
16,
17,
18], gyroscopes [
19,
20], accelerometers [
21,
22,
23] and pressure sensors [
24,
25,
26]. Moreover, other gait instruments have also been used for several different purposes; for example, inertial measurement units are placed at shank and waist to classify elderly, post-stroke and Huntington’s disease using a combination of support vector machine (SVM) and hidden Markov model (HMM) [
27]. Similarly, Gao et al. used the inertial sensor placed in waist and ankle to differentiate normal and abnormal gaits by employing a deep neural network [
28]. However, the placement of the sensors in the waist and ankle would not be convenient to keep wearing during a daily life. The combination of accelerometers, gyroscopes and pressure sensors equipped with insoles were utilized to classify several types of gait patterns such as walk, run, stair climb up and stair climb down [
29]. While this study showed high accuracy with over 90% classification, the abnormality of a gait was not addressed.
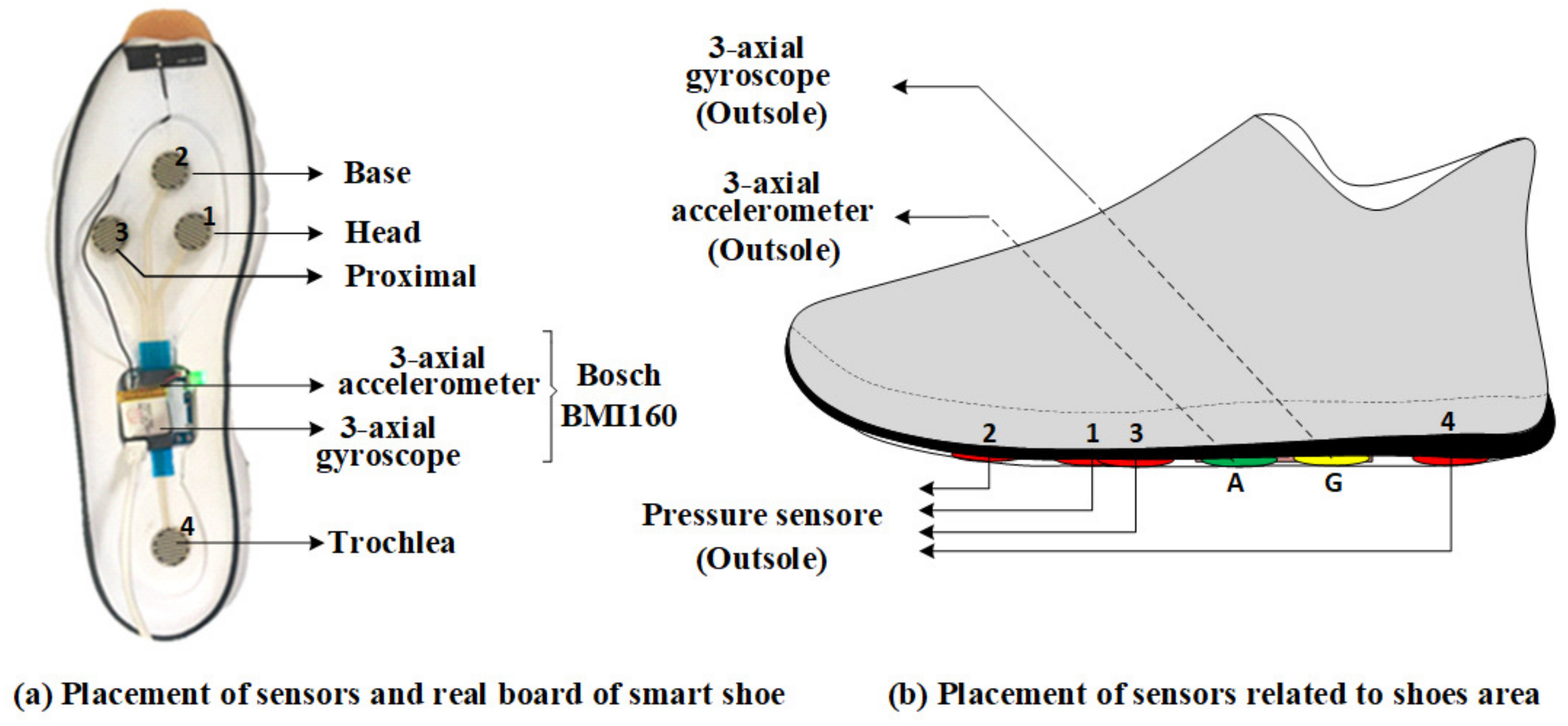
Unlike the previous studies that focused on normal gait patterns such as walking, running, climbing up stairs and climbing down stairs, this study used data collected from participants wearing smart shoes to detect normal and four abnormalities, namely pronation, supination, unstable left foot and unstable right foot. Smart shoes were equipped with an accelerometer, a gyroscope and four pressure sensors, which were placed on each outsole to encourage people to wear shoes comfortably and walk naturally. Extensive feature analyses were then conducted to find the best sensor combination and the optimal number of significant features to be used for the gait classification. These analyses included the investigation of different sensor combinations and different data segmentations based on the gait cycle parameters. In addition, significant features were selected based on their information gains, and the feature number was reduced using principal component analysis (PCA) [
30]. These final features were utilized for the gait classification task with the random forest (RF), k-nearest neighbor (KNN), logistic regression and SVM algorithms. The objective of this study was to find the best combination of the sensors producing significant features by conducting feature analysis and performing five-class classification.
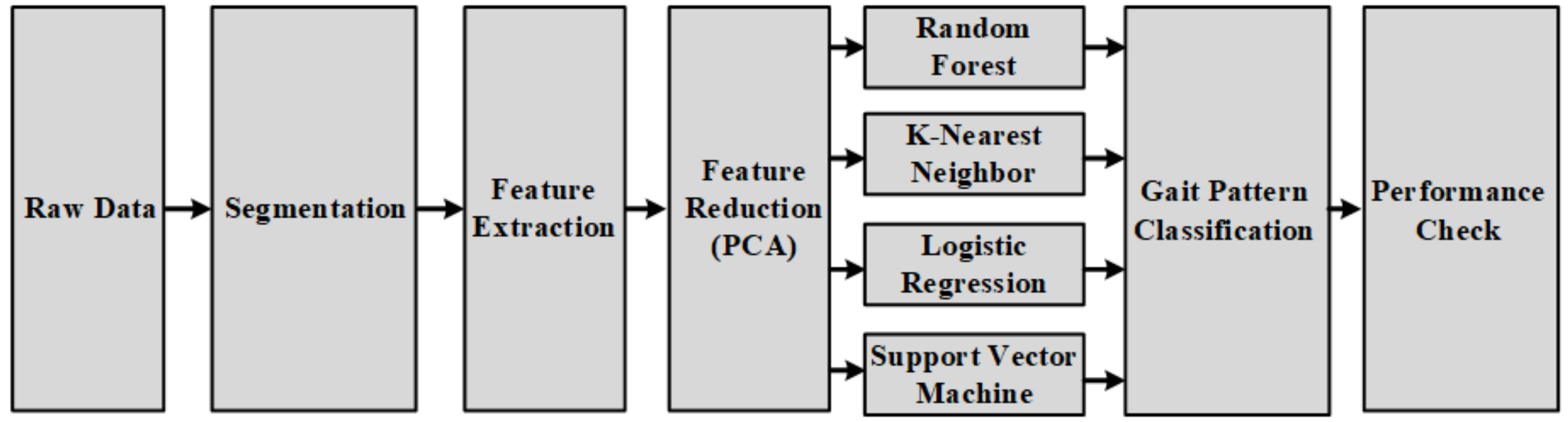
Figure 1 shows the overall experiment process of the gait classification. Raw data from the smart shoes sensors were segmented, and nine statistical feature extracting method were applied. To avoid the complexity of the model due to high dimension of multiple feature spaces, principal component analysis (PCA) was initialized for a feature reduction. Four machine learning algorithms were applied to classify gait patterns: random forest, k-nearest neighbor, logistic regression and support vector machine. In the end, their performances were evaluated in terms of accuracy, precision and recall, as explained in
Section 2.8.
4. Discussion
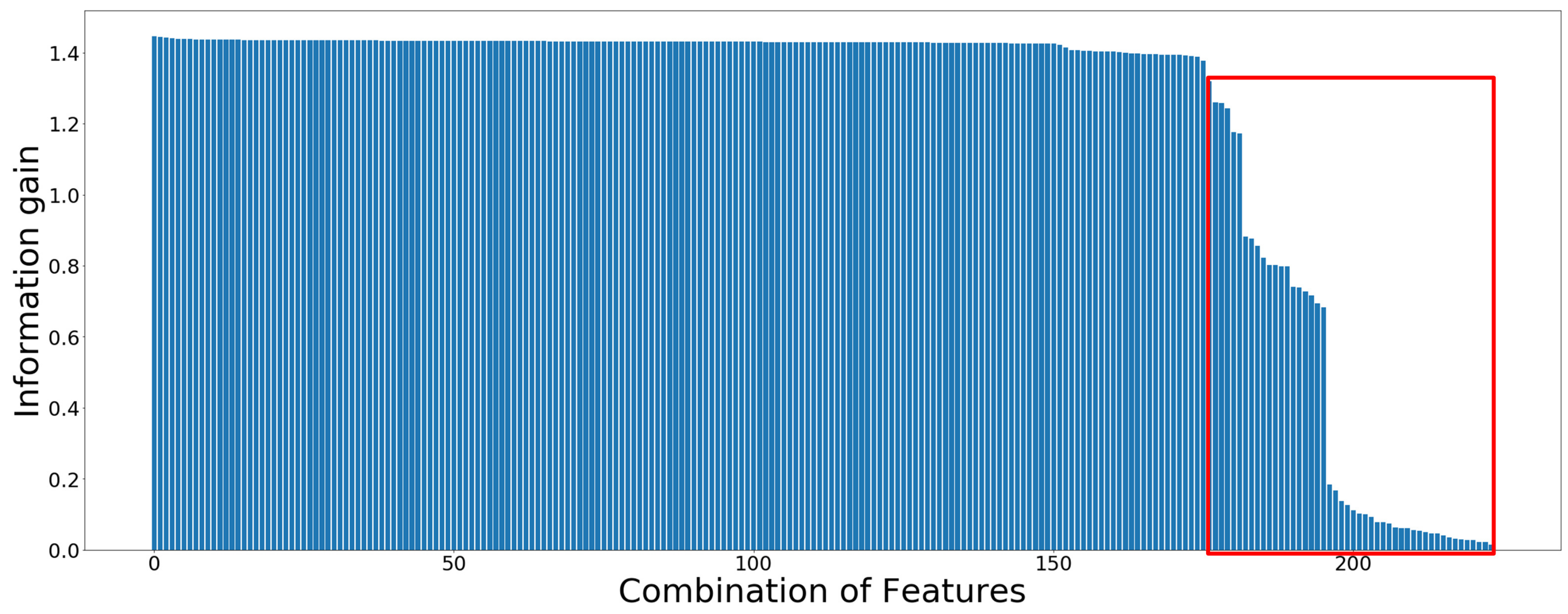
In this section, both feature analysis and sensor significance are further discussed. The feature analysis involving feature selection and reduction have an important role in reducing processing time and preventing the model’s complexity for gait pattern classification. Firstly, the information gain is used to select 172 prominent features out of 224 features. However, the selected number of features is too large to be computed in the classification algorithm, so that PCA is applied for the reduction of the features dimensions. PCA provides low dimensional approximations to the data with projecting the data orthogonally onto linear subspaces.
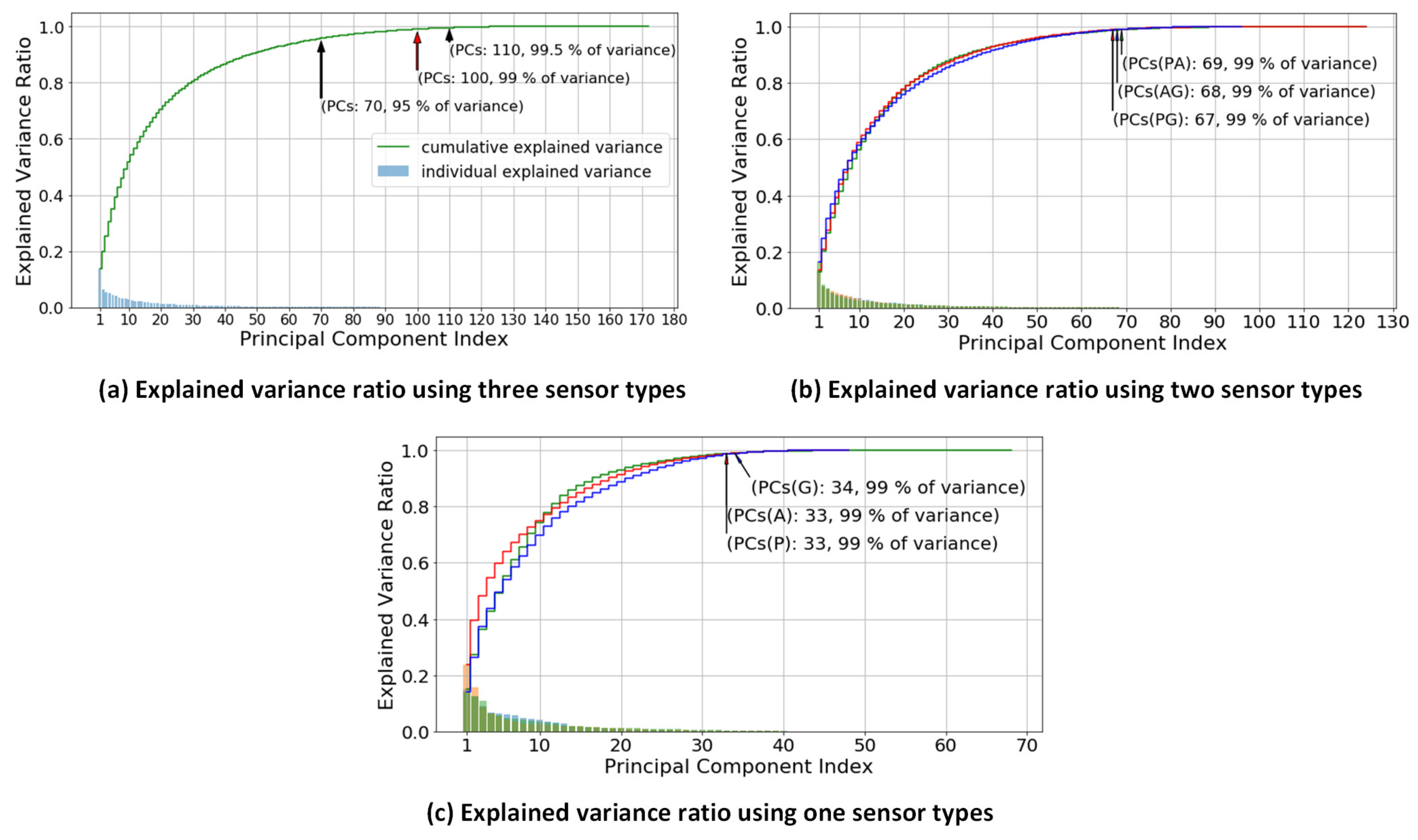
Figure 5 shows the variance ratio with respect to its principal components of each sensor combination. The variance of each PC represents the contribution rate with respect to the performance of algorithms [
38]. The curve of cumulative explained variance illustrates the variance ratio for its number of PCs. Besides that, each point of the variance ratio in the curve would affect the high or low performance results of the algorithms. The lower is the chosen variance ratio, the lower is the number of PCs utilized, and consequently the performance also deteriorates. This is trade-off between the number of PCs and its performance algorithms. The lower number of PCs demands lower computation time, and thus it is necessary to find the optimal number of PCs. In
Figure 5, we retain 99% of the variance from the original dimension space as the optimal number of PCs. Additionally,
Table 8 describes the effect of different number of selected PCs on the classification performance. In the case of “Acc+Gyro’, the optimal number of PCs (68) gives 89.36% accuracy which is comparable to the accuracy using the maximum number of PCs (96) with 89.30%. This number of PCs, 68, is only 30% of the original, 224. Similarly, in the case of “Acc+Gyro+Press’, the optimal number of PCs (100) gives the accuracy as high as that using maximum number of PCs (172). These two case results demonstrate that the selected optimal PCs maintain the classification performance with a lower feature dimension than the original.
The sensor significance analysis was conducted to find the optimal combination of sensors for the development of low-cost smart shoes.
Table 3 describes the contribution of each sensor and the combination of sensors to the classification performance. It clearly demonstrates that the smart shoes with an individual type of sensor provided around 60% accuracy only. Interestingly, the combinations of two and three sensors with the SVM classifier yielded a comparable accuracy from 86% to 90%. The combination of “Acc+Gyro” gives the most comparable accuracy, 89.36%, to the combination of all the three sensors, 90.64%. Moreover, in terms of feature space dimension shown with the number of PCs, the combination of two sensors required fewer feature dimensions than those of three sensor combination. Since this study aims to develop low-cost smart shoes, indeed using the “Acc+Gyro” sensors is favorable to be chosen than those using all three sensors regarding the cost of materials and model complexity.
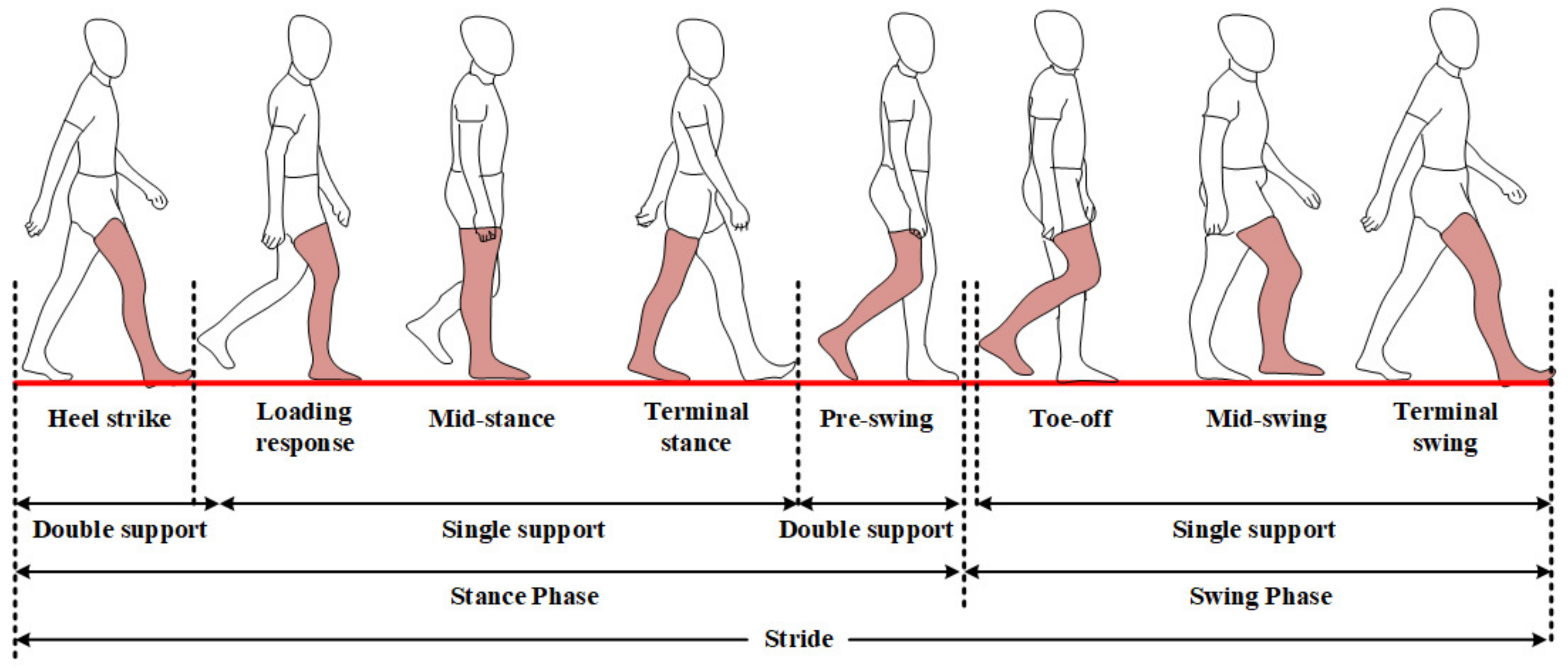
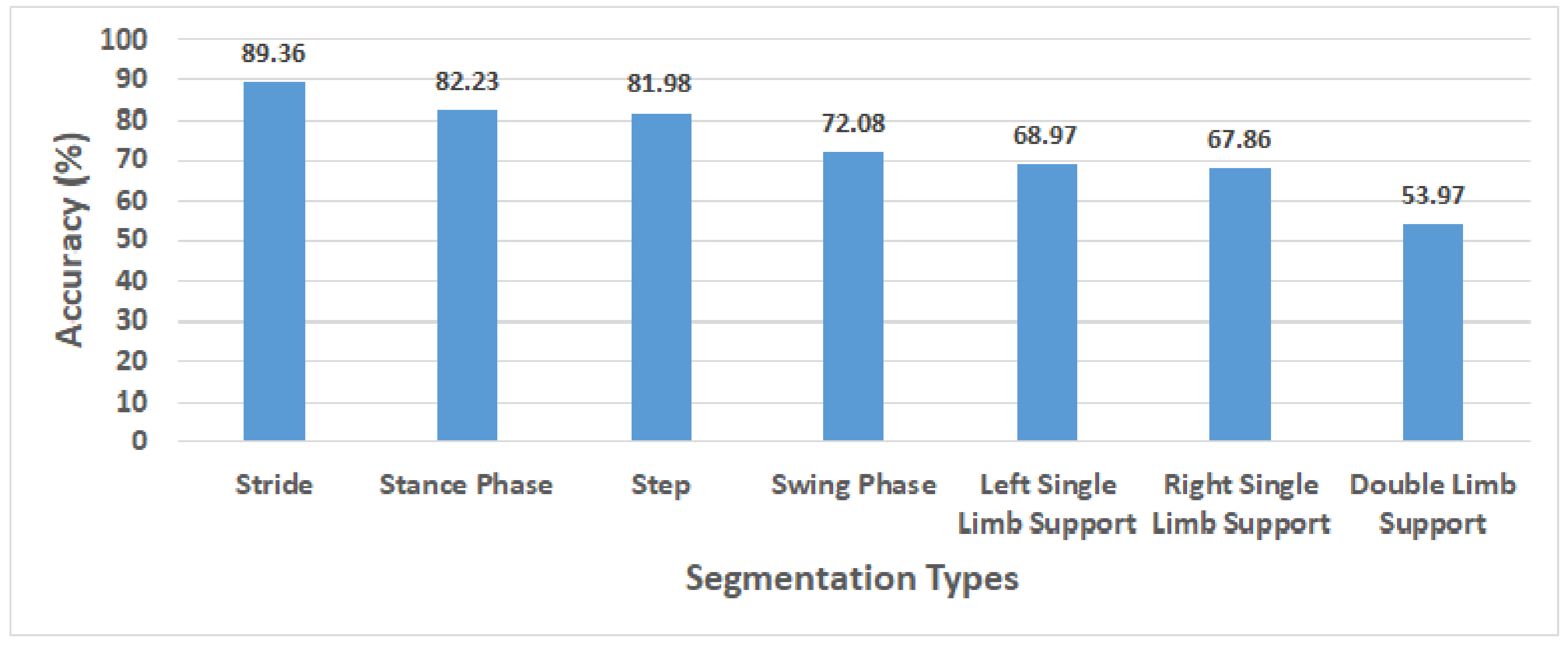
The selection of gait segmentation types has an important role to reach the best performance classification. In
Figure 6, we sort the segmentation types based on the length of step during the participants walking from the longest to the shortest ones. The longer the step is, the more information it has. The results show the performance of gait classification using the stride reached the highest score (89.36%) followed by the stance phase (82.23%), step (81.98%), swing phase (72.08%), left single limb support (68.97%), right single limb support (67.86%) and double limb support (53.97%). The stance phase, slightly different from the step in the length of segmentation, shows the next highest performance and slightly higher performance than that of the step. Meanwhile, the swing phase, the left single limb support and the right single limb support reached performances lower than that of the step. The double limb support with the shortest segmentation length obtained the worst performance due to the least information.
Figure A1,
Figure A2,
Figure A3,
Figure A4,
Figure A5,
Figure A6 and
Figure A7 in the
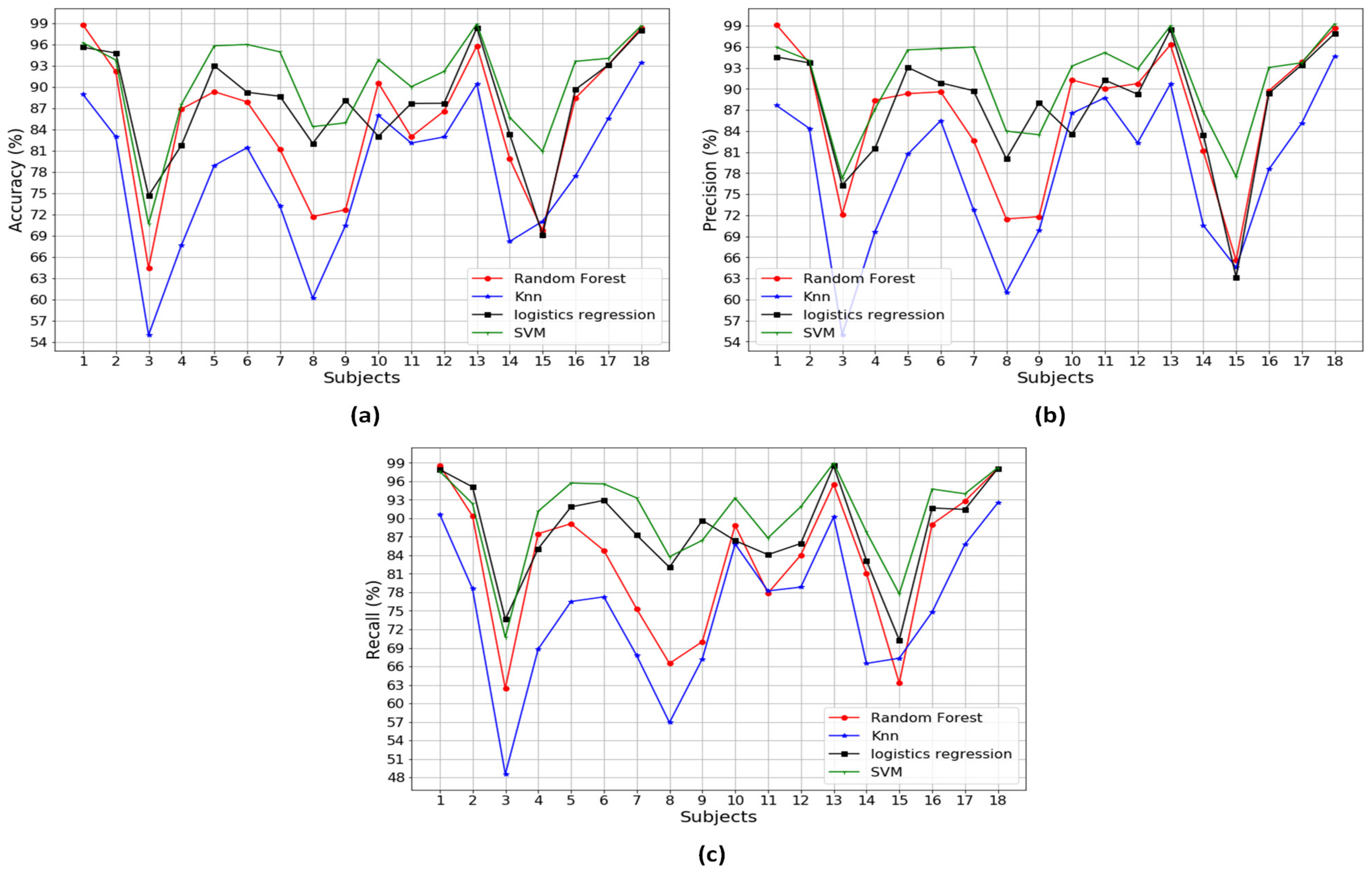
Appendix A illustrate the classification performances of the algorithms over 18 participants.
Figure A1 describes the classification performances when using a combination of three different types of the sensors. It is noted that SVM outperformed the other methods, with the highest performance, 99.15% accuracy, 99.34% precision and 99.08% recall.
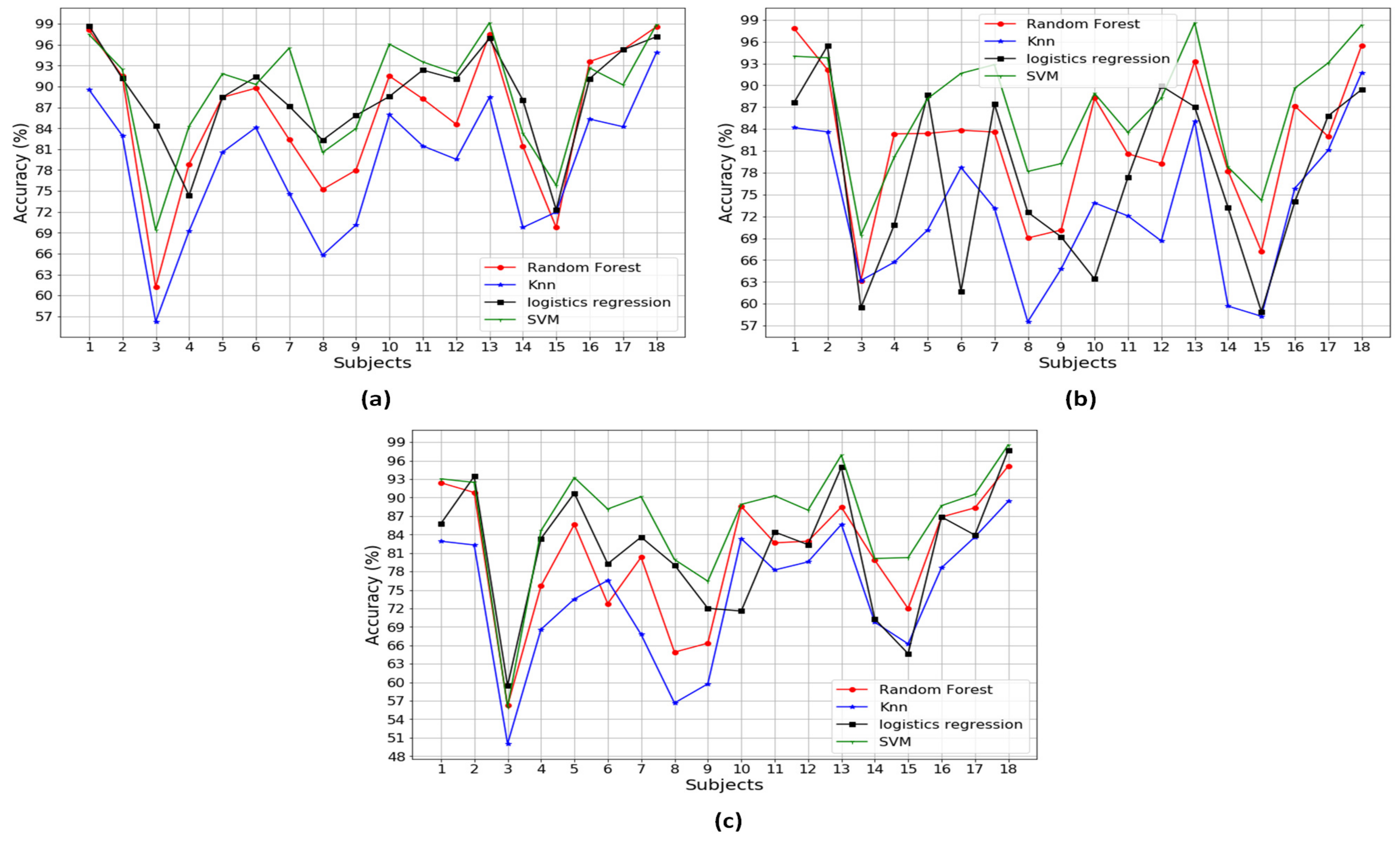
Figure A2,
Figure A3 and
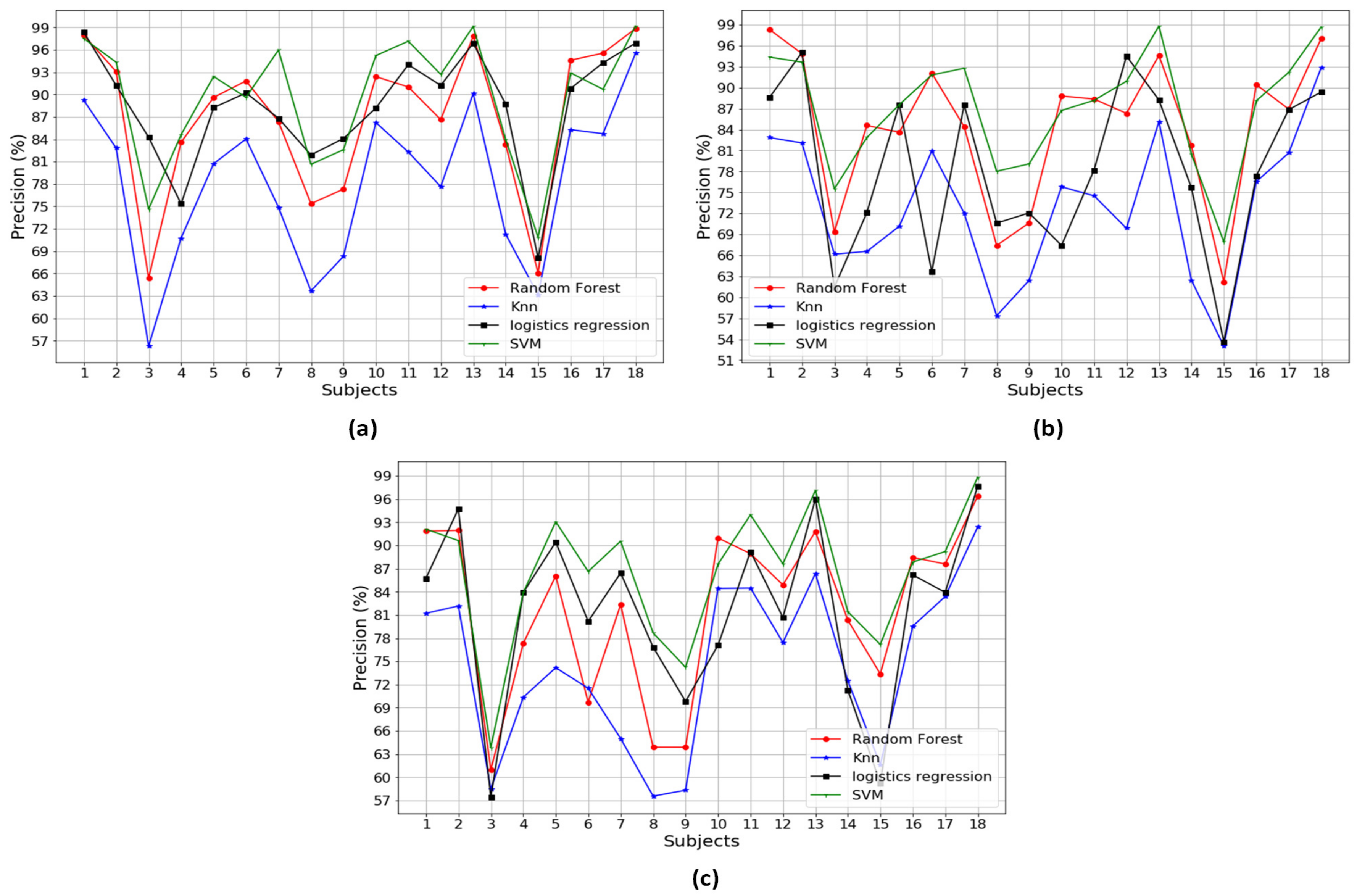
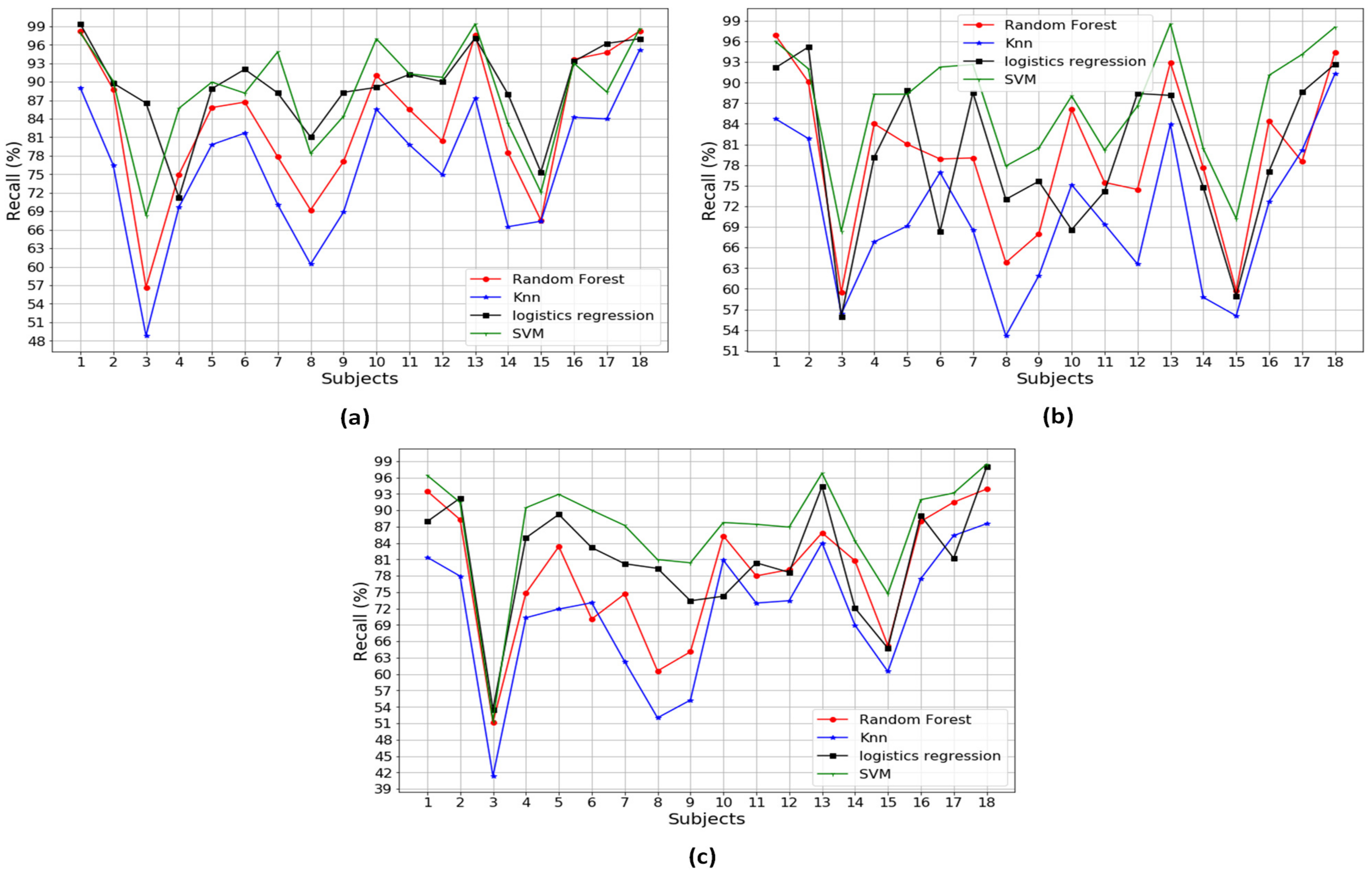
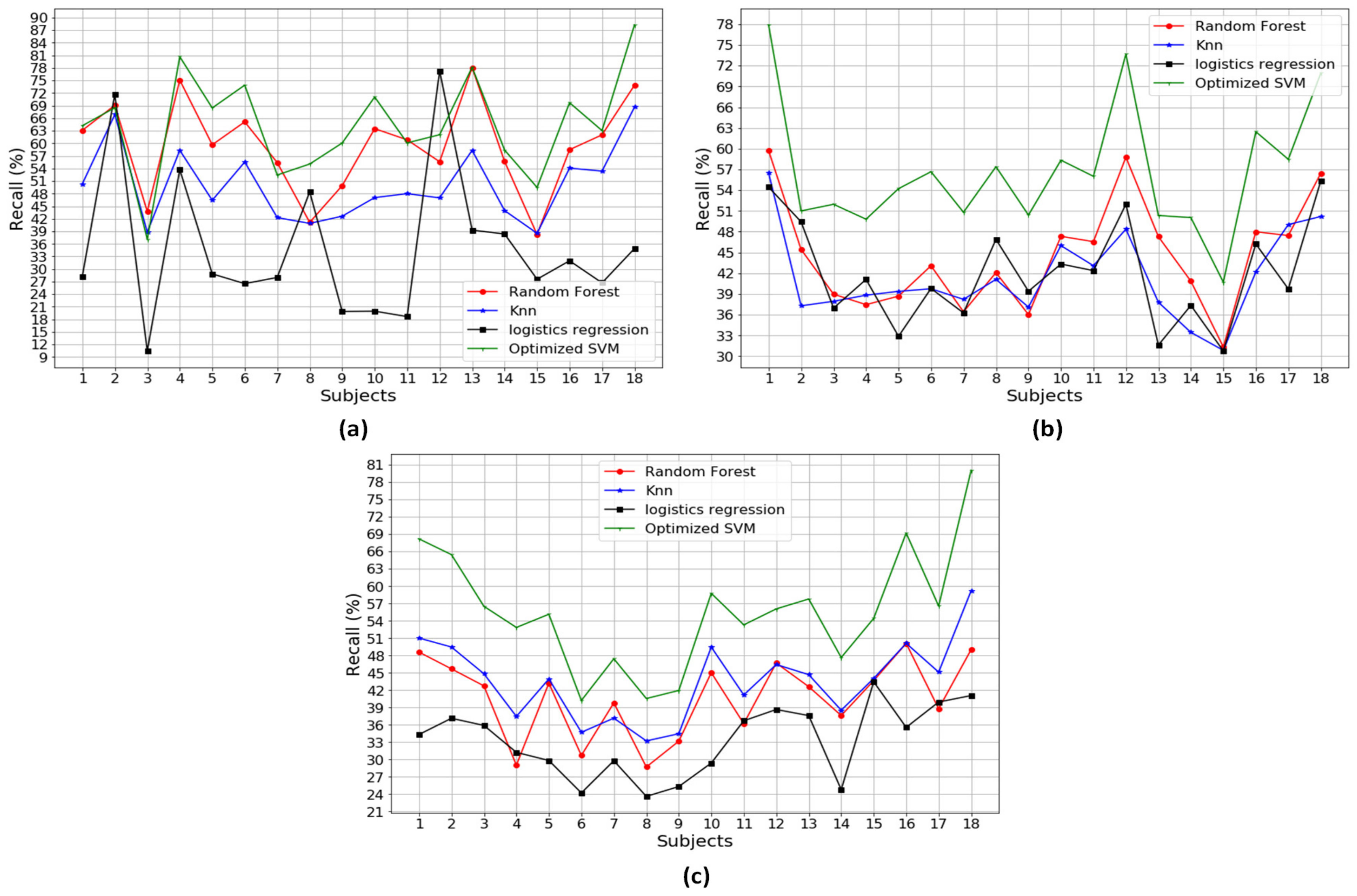
Figure A4 show the classification performances when using a combination of two different types of the sensors, that is a combination of Pre+Acc, Pre+Gyro, and Acc+Gyro, respectively. Based on the analysis in
Table 3, the combination of Acc+Gyro using SVM is the best with the averaged accuracy of 89.36%, precision of 89.76% and recall of 88.44%.
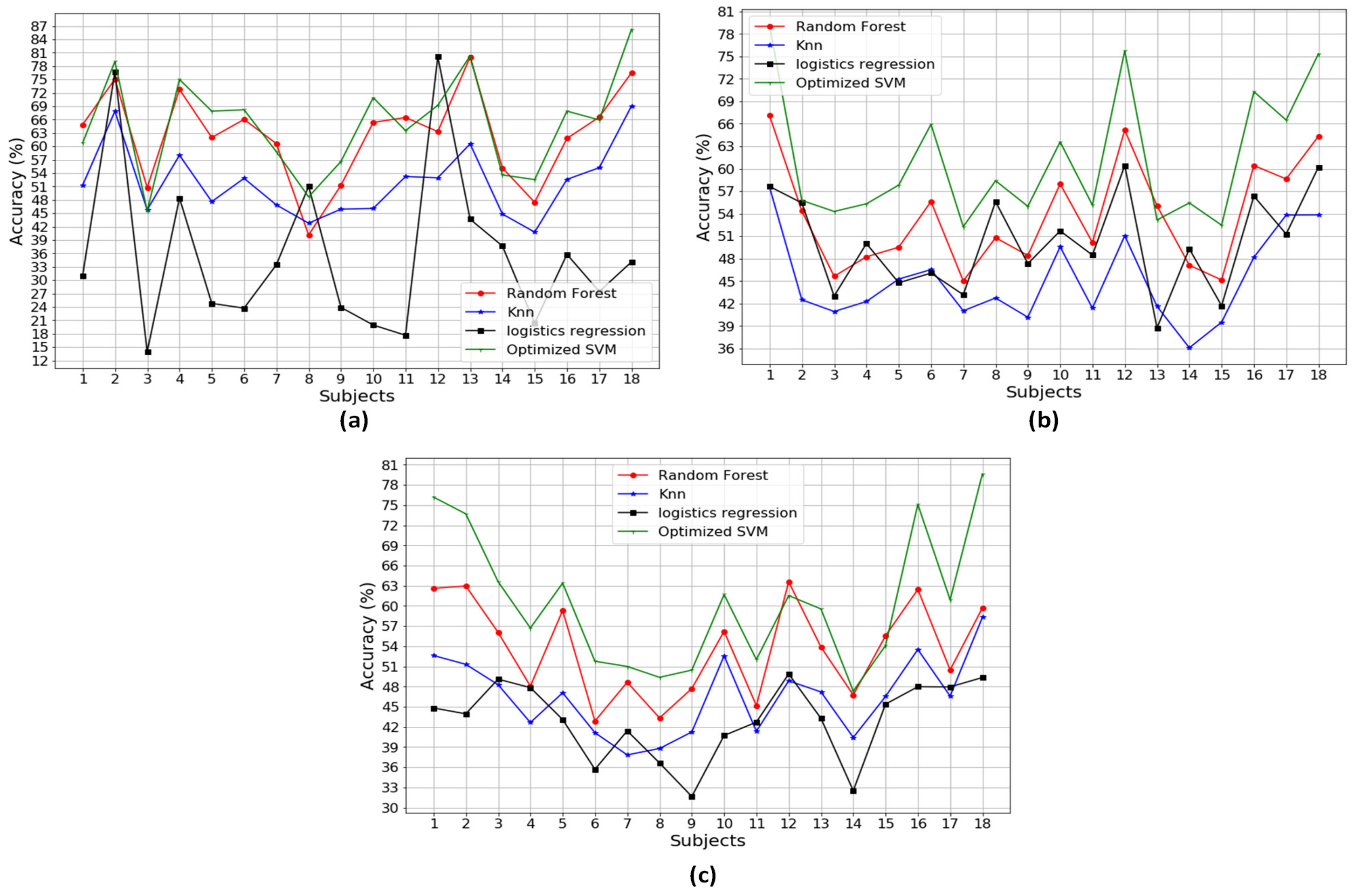
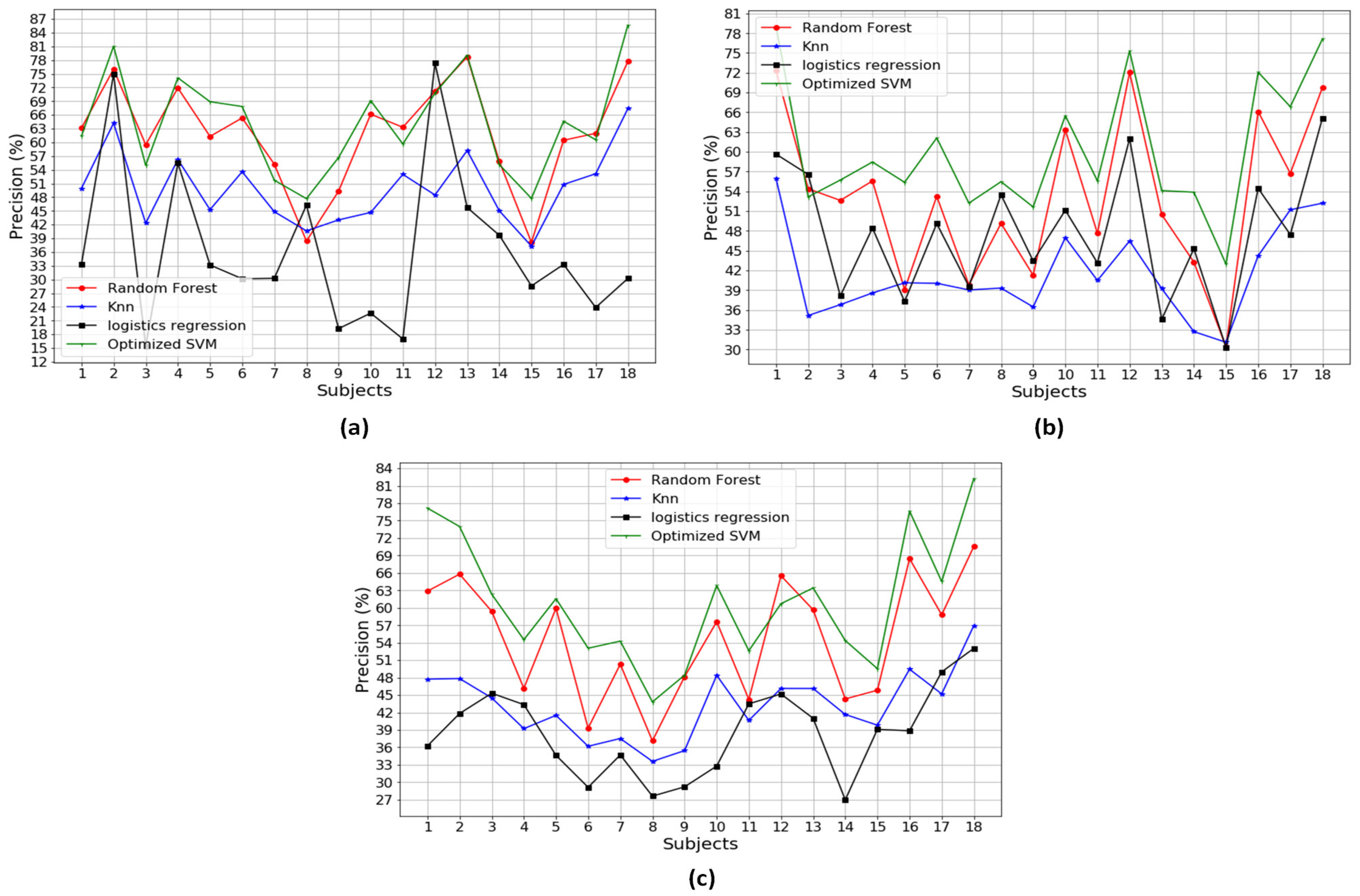
Figure A5,
Figure A6 and
Figure A7 describe the classification performances when using the individual sensor. Compared with the performances of the combinations using two or three types of sensors, those using the individual sensor were worse. This would be because the methods using an individual sensor obtain insufficient information and thus produce poor performances.
By analyzing the confusion matrix in
Table 9, the error rate from those three participants (3, 8, and 15) are relatively high (25.4%, 19.0% and 32.3%). We compared them with the other participants who yielded higher performance (Participants 5, 13 and 18), but had relatively lower error rates (7.6%, 0.9% and 0.8%). There are two reasons for these: First, even if they are healthy participants, the walking ratio (stance/swing) could be unbalanced [
47]. Most of the errors can be inferred as they are distributed in unstable left/right compared to normal gait. Second, it might not be easy for those normal participants to mimic the abnormal gait even though he was trained. We have included these interpretations about the limitations of the experiments. Based on the results, the total number of each gait type might be different due to the segmentation process. We used a threshold to decide the start and the stop of one segment. Based on the experiment, it was empirically found that 40 is the best threshold.
Table 10 shows the performance of methods used in related studies. Dominguez et al. proposed neural network (NN) model to identify gait types [
48]. Even though the model obtained an accuracy of 90%, this study only classified two gait types, namely supination and pronation with total participants six people. Jiang et al. [
49] identified two activities, walking and jogging, using a convolutional neural network (CNN) on eight different people and obtained 92.5% accuracy. Hayashi et al. [
50] used the SVM algorithm to classified healthy–unhealthy patients. Using the same method, Begg et al. [
43] conducted gait analysis and differentiated into young and old classes. Asymptomatic and osteoarthritis was differentiated from gait pattern using polynomial representation and wavelet by Mezghani et al. [
51]. In the study, they utilized a 3D ground reaction force to acquire the signal from the participants. Zeng et al. [
52] identified healthy and anterior cruciate ligament patients using RBF-NN and reached 93.47% of accuracy.
Zhang et al. [
53] proposed the combination methods to recognize old and young people from gait patterns. Using Counter+HMM, Silhouette+HMM, Counter+Naive Bayes and Silhouette+Naive Bayes accuracy performances of 83.33%, 76.24%, 65.85%, and 63.28%, respectively, were obtained. In our study, we classified gait types into five classes with an accuracy of 89.36%. Our method is comparable to other related studies due to the higher number of classes but still showing good performance.
The practical application of this study could be implemented as wearable smart shoes in daily activities as early detection of foot abnormality. This technology has the possibility to be part of the development of the Internet of things in the future [
54]; by wearing smart shoes, the gait signals from the patients could be captured for further analysis. The future study of smart shoes could be conducted to identify an abnormality or particular disease in our body, by putting on the sensors on the specific area of the foot that has a relation with the specific organs [
55,
56].
In this study, the participants were not experiencing any gait disorder. All participants were healthy graduate and undergraduate students without musculoskeletal disorders. All participants spent their time sitting and studying in the classroom. They did not use their own vehicle when going out, but more often went on foot. They just mimicked four abnormal gait types under the supervision of the experts. Before capturing their gait signals, the participants were trained to mimic each gait type. The gait data were captured within 3 min, hence the selection of segmentation types should be considered for further study.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}