Transduction Mechanisms, Micro-Structuring Techniques, and Applications of Electronic Skin Pressure Sensors: A Review of Recent Advances





Abstract
1. Introduction
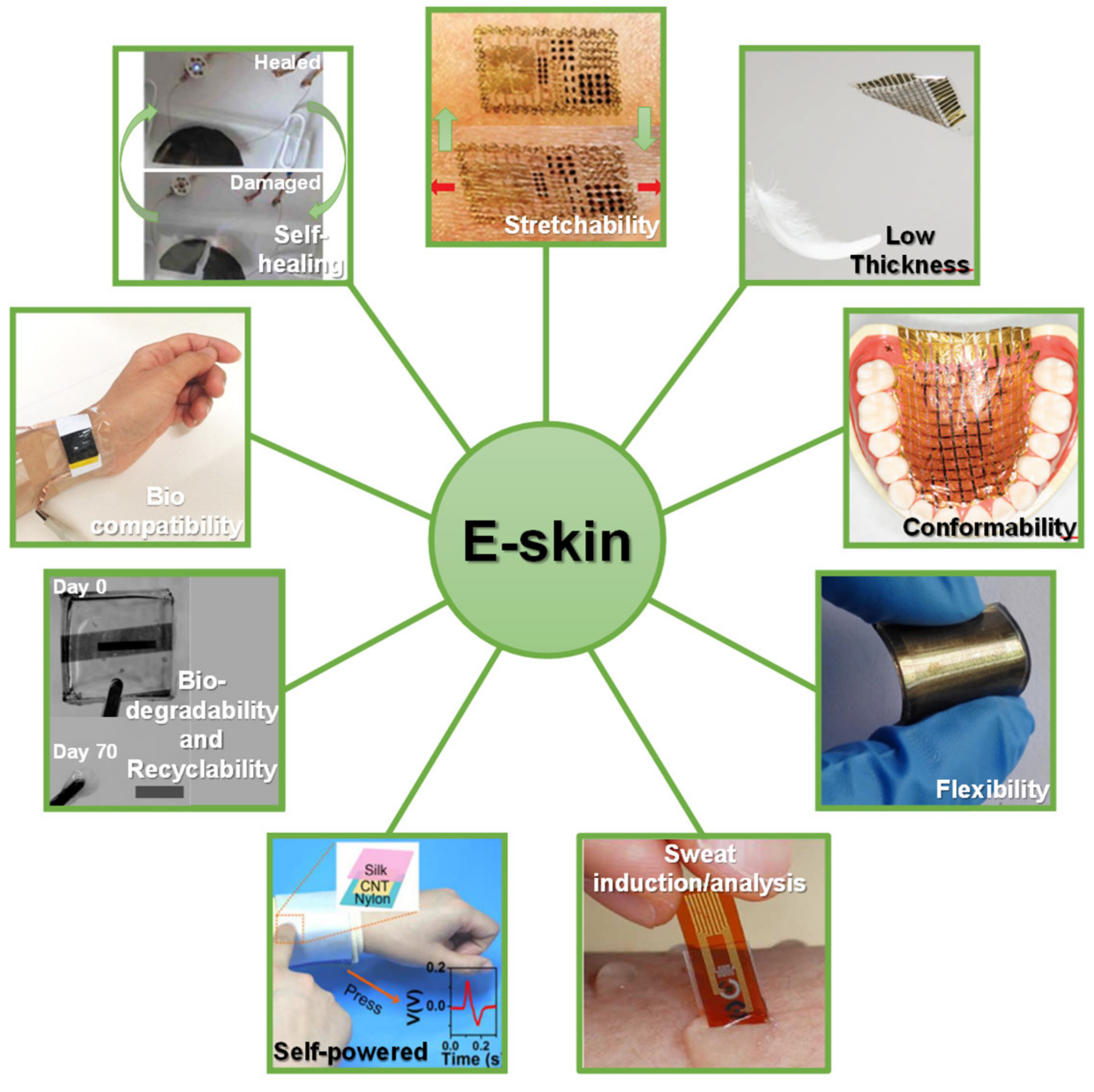
- Stretchability—also variable with age, newborns skin can be subjected to a deformation of 75% before rupture, while for the elderly this value decreases to 60% [7];
- Flexibility—skin is highly flexible, especially in some anatomical places. For example, during squat position, the knee, and consequently the skin on it, can bend about 110° [10];
- Conformability—skin covers body tissues in a conformal way, following its exact shape, which allows the perception of movement of internal structures, namely blood vessels, muscles, and tendons, at its surface;
- Sweat induction—especially when the surroundings are warmer than skin temperature, sweat is the only mechanism for the body to lose heat [1]. Furthermore, sweat is an important mirror of health condition, given its high content in several metabolites that are closely related to health disorders, physical activities, and food consumption [11,12]. Therefore, it is highly desirable and useful to achieve an e-skin able to induce sweat, analyze these chemical molecules, and monitor, in real-time, the health status of an individual [12,13,14,15].
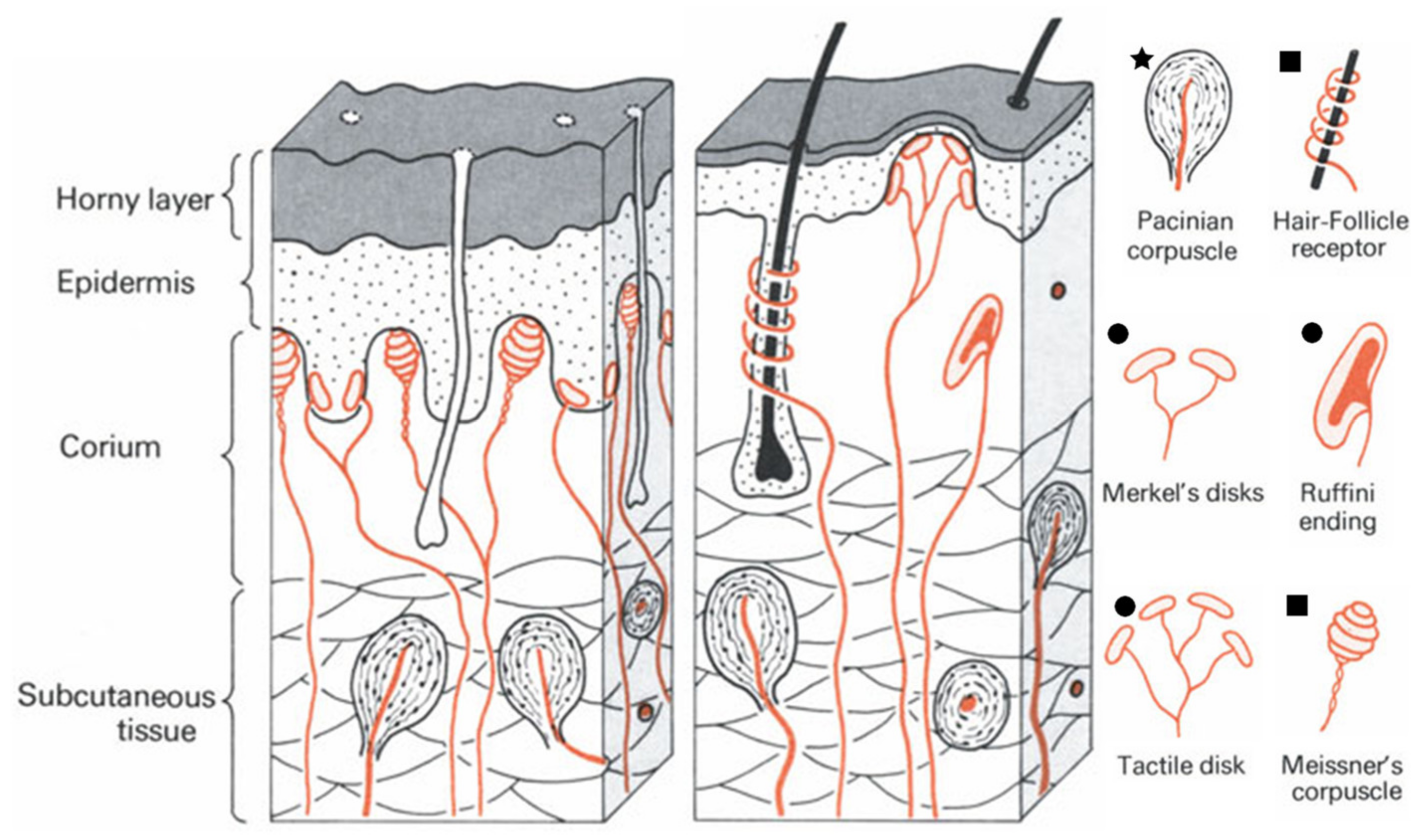
1.1. Human Skin as Inspiration
1.2. Electronic Skin
2. Pressure Sensors
2.1. Pressure Transduction Mechanisms
2.1.1. Capacitive Sensors
2.1.2. Piezoelectric Sensors
2.1.3. Piezoresistive Sensors
- (i)
- Resistivity variations—in a semiconductor, as a result of band structure changes induced by pressure [122], or in composites, as a result of interparticle distance change [42,123,124]. For these cases, the following equation may be applicable (Equation (3)):where R is the resistance, ρ is the material resistivity, l is the conductor length, and A is the transverse section area [121];
- (ii)
- Contact resistance variations—through the modification of the geometry of the sensing element [19,31,125,126,127,128,129,130], by contact area changes induced in interlocked designs [38,87,131,132,133,134,135,136], or through contact area changes in foamy or spongy materials [41,137,138]. For these cases, the contact resistance is governed by Equation (4):where RC is the contact resistance and F is the force [4]. This equation shows that sensors playing on contact resistance have a high sensitivity for low forces and a large working range [4] which can also be easily tuned through micro-structuring [87,127,132,139].
2.1.4. Triboelectric Sensors
2.2. Comparison of Transduction Mechanisms
2.3. Micro-Structuring Techniques and Materials
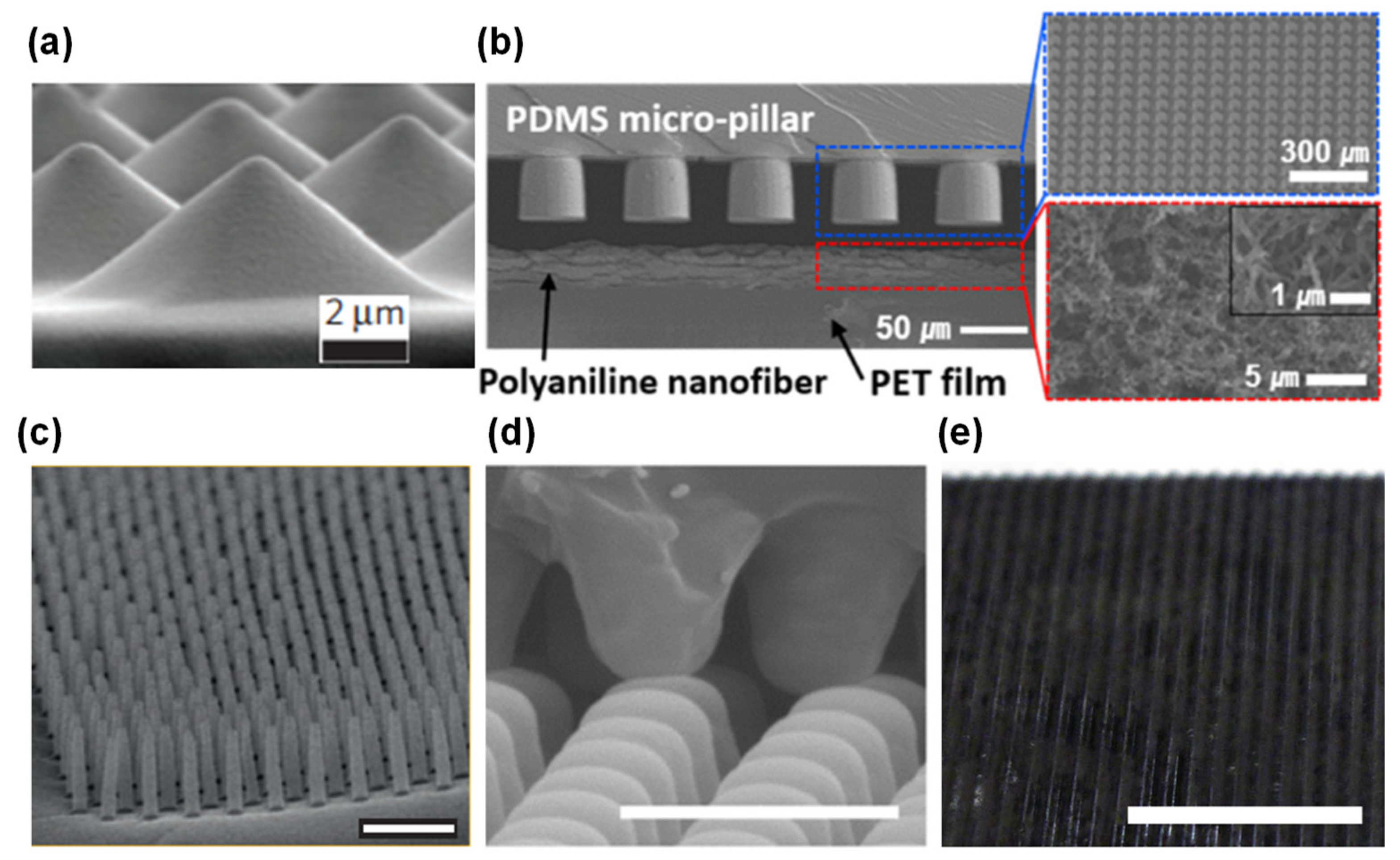
- Photolithography techniques to etch silicon wafers and produce molds. Despite being expensive, complex, and time-consuming, this micro-structuring strategy is widely used to obtain highly regular and homogeneous patterns (shown in Figure 9) based on pyramids [19,24,125,126,129,136,156,157,158,159,160,161,162,163], pillars [31,87,132,136,159,164], hairs [131,165], domes (or semi-spheres) [133,136,139], triangular lines [30,41,160], and cubes [24]. These micro-structured films are typically made of PDMS [19,24,30,31,87,125,126,129,139,156,157,158,160,161,162,164,165] or composites of PDMS with MWCNTs [132,133,136]. For the case of piezoresistive sensors, PDMS micro-structures are commonly covered by SWCNTs or MWCNTs, deposited through spray-coating either directly on the PDMS [19,129] or previously on the mold before the PDMS deposition [156,158]. Metals deposited by vapor deposition methods such as gold [31,157], platinum [87,131], and nickel [87] have also been explored. Inkjet printing directly on PDMS is a more recent strategy to cover the films with MWCNTs [162] or a composite of PEDOT:PSS, polyurethane dispersion, and silver nanoparticles [161]. For the cases where only one film is micro-structured or an additional support is needed, substrates of polyethylene terephthalate (PET) [19,31,139,160], PET with indium tin oxide (ITO) [24,30,41,126,129], polyimide [30,161], PDMS [131,164], polyethylene [156], and polyethylene naphthalene (PEN) [165] have been employed.
- Use of everyday objects as unconventional molds. This approach is much less expensive than photolithography techniques, nevertheless it does not allow for design changes in the micro-structuring due to limitations regarding the objects available to act as molds. Several objects have been used as molds, from sandpaper [130,166,167,168,169,170,171] to paper [39], leaves of several plants’ species [38,43,142,172,173,174,175,176,177], insect wings [142], animals skin [178], and fabrics [140,179,180,181,182]. PDMS is once again the most chosen material for the micro-structured films [38,39,130,140,142,167,168,169,172,173,174,175,176,177,178,179,182], as well as PDMS-based composites with graphite [166,170] or carbon nanotubes (CNTs) [181]. For some sensors, it is common to coat PDMS films with gold [38,169], silver nanowires [39,173,176], rGO [130,168], CNTs [167,172], SWCNTs [179], graphene [172,174,175,182], and PEDOT:PSS [178] through vapor deposition methods [38,169], spray-coating [39,167,175,176], dip-coating [168,179], and transfer methods [172,174,182]. Polyimide [39,43,171] and PET with ITO [166,170,177] are common substrates as well.
- Treatments of the sensing film, such as PDMS heating [183,184], PDMS stretching and UV or oxygen plasma exposure [75,141,185,186], and self-assembly or chemical reaction [86,99,135,184,187,188,189,190,191]. Regarding the latter approach, the most common materials employed to achieve a certain level of micro-structuring are ZnO in several shapes [99,135,188,190], graphene [189], and silver particles [191]. For all strategies, the resultant micro-structuring has a limited level of tailoring.
- Incorporation of sponges [192,193,194,195,196,197,198,199], foams [200,201,202,203,204,205,206,207], paper [208,209,210,211,212], and natural or synthetic fabrics (such as cotton, leather, silk, polyamide fabric, polyester fabric, polypropylene fabric, polyurethane fibers, and tissue paper) [32,123,134,213,214,215,216,217,218,219,220,221,222,223] that are afterwards chemically modified to become conductive, typically by carbonization [123,196,216] or by dip-coating with rGO [192,195,219,221], graphene [134,223], CNTs of different types [209,213,220], or silver nanowires [195,212,218,221,222].
- Production of porous films through freeze-drying [137,224,225,226,227,228,229,230] or using sacrificial templates made of sugar [138,231,232,233,234], salt [233,234,235,236,237], or polystyrene spheres [73,238,239,240]. The most explored materials in these techniques are PDMS [73,138,231,232,234,235,237,238,240], graphene oxide [224,225,226], and ecoflex [233,236]. Despite their low-cost, all these techniques also have a limited level of design tailoring.
- Fabrication of 3D printed molds [78,241,242,243,244] (majorly to micro-structure PDMS or PDMS composites) or direct printing of materials with a 3D printer [245,246], which is a low-cost approach to achieve a micro-structuring, nonetheless typically only allows the achievement of structures with a size in the order of few mm due to printer and filament constraints.
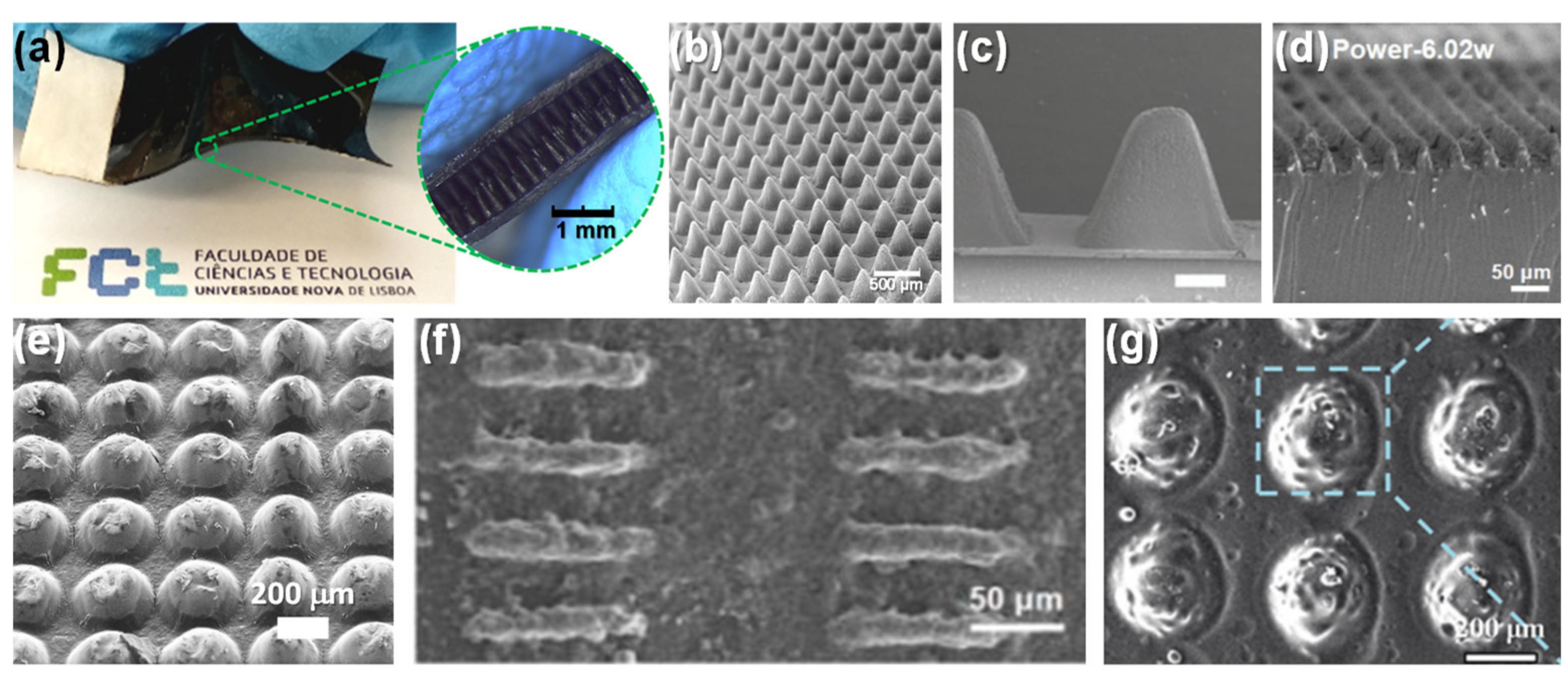
- Production of molds through laser engraving technique. This is a quite recent strategy to avoid the high costs of common photolithography processes without losing the high customization degree of the micro-structuring design as it happens with the use of unconventional molds, presenting, therefore, a high benefit/cost ratio [22,109,247,248,249]. Essentially, the laser beam transfers a high amount of energy that induces the melting or degradation of a material, creating cavities whose shape can be controlled through the design imported to the equipment, laser power and speed, as well as the material itself [22,247]. The material with the cavities pattern can be posteriorly employed as a mold for soft lithography processes, commonly for micro-structuring PDMS [22,37,40,247,248,249,250,251,252,253] or PDMS composites [109]. For piezoresistive sensors, these films have then been coated with carbon ink (by spin-coating) [22,247,248,249], CNTs (by drop-casting) [37,250], silver nanowires (by spin-coating) [252], or rGO (by spray-coating) [253] to become functional.
2.4. State-of-the-Art
3. Applications
3.1. Health Monitoring
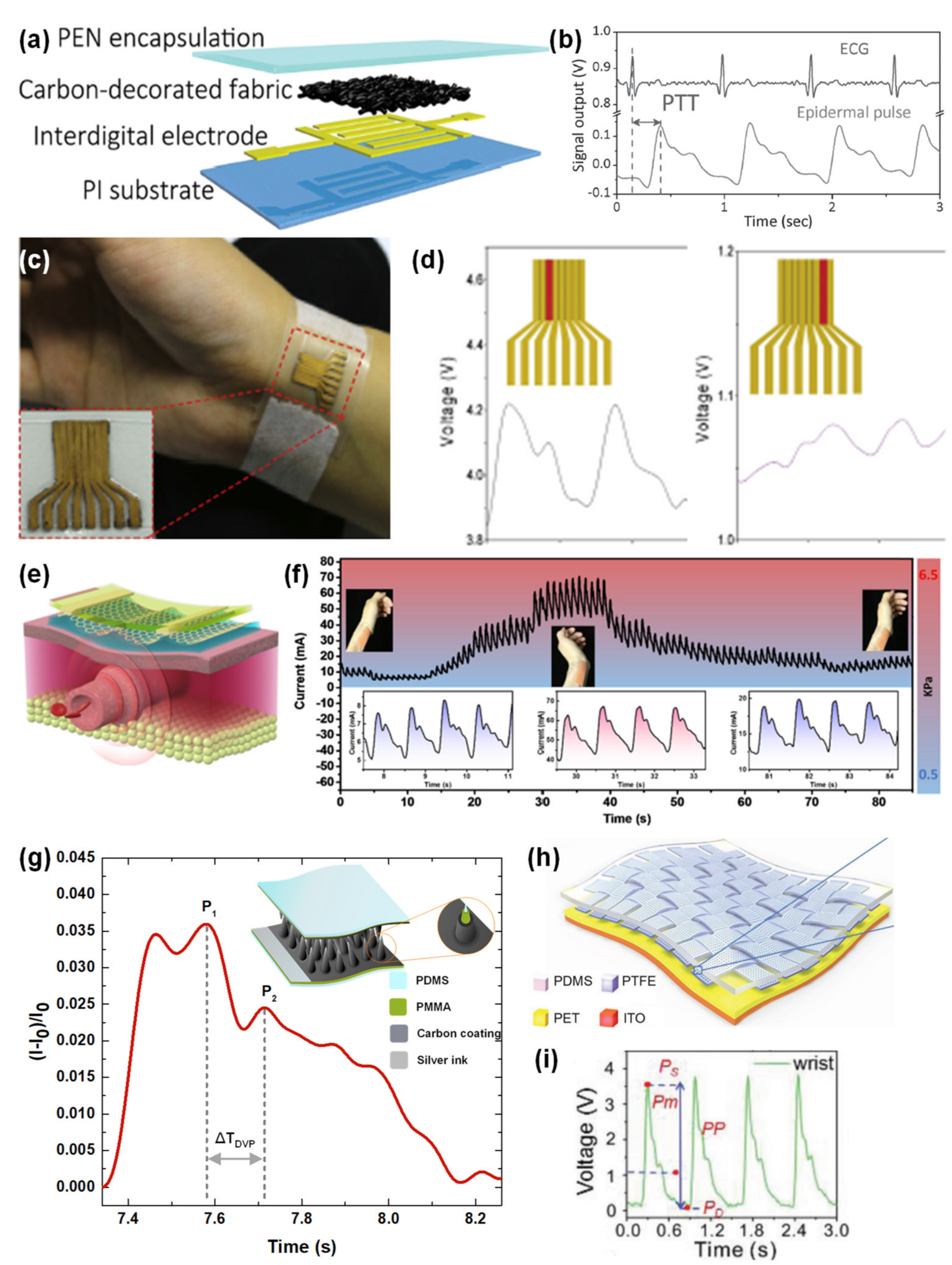
3.1.1. Blood Pressure and Blood Pressure Wave
- A suitable sensitivity—it should not be too high, to avoid noise amplification [32], yet it needs to be above a certain value to confer the sensor the ability to capture the signal and distinguish its exact shape. Therefore, it should be at least a few kPa−1;
- Fast response and relaxation times—of at least 20 ms for a sampling rate of 50 Hz [32].
3.1.2. Heartbeat
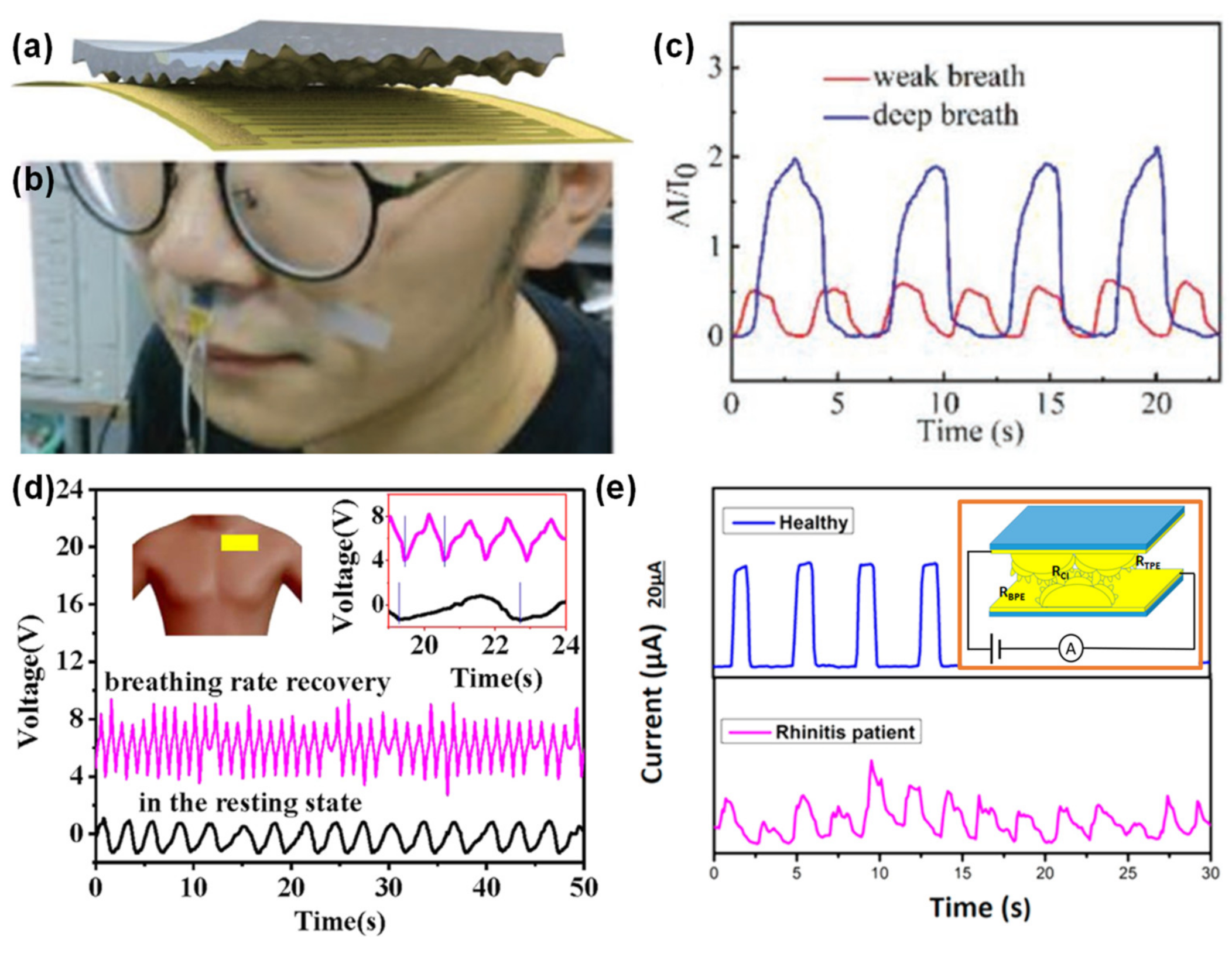
3.1.3. Respiration Rate
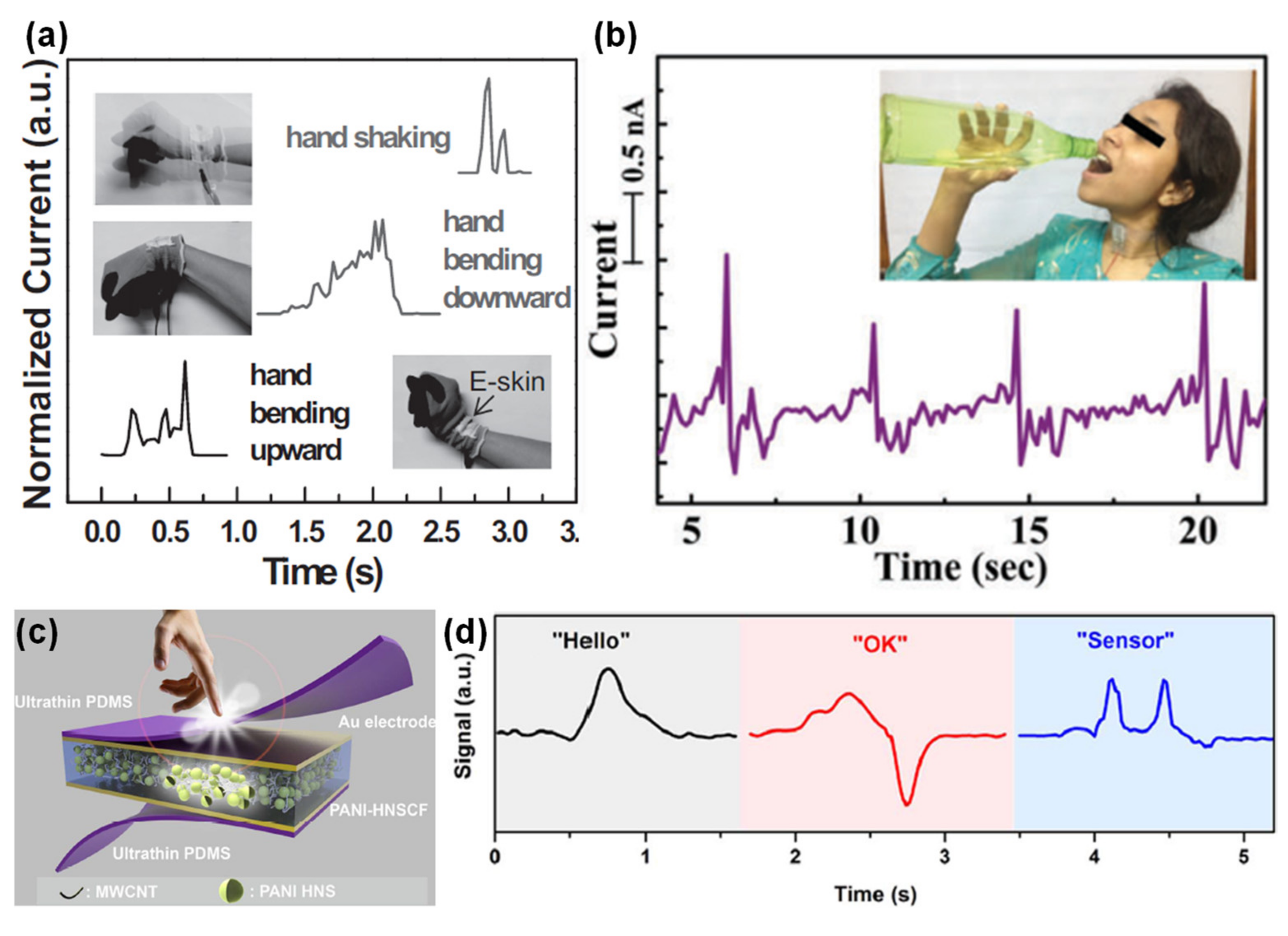
3.1.4. Muscles Movements
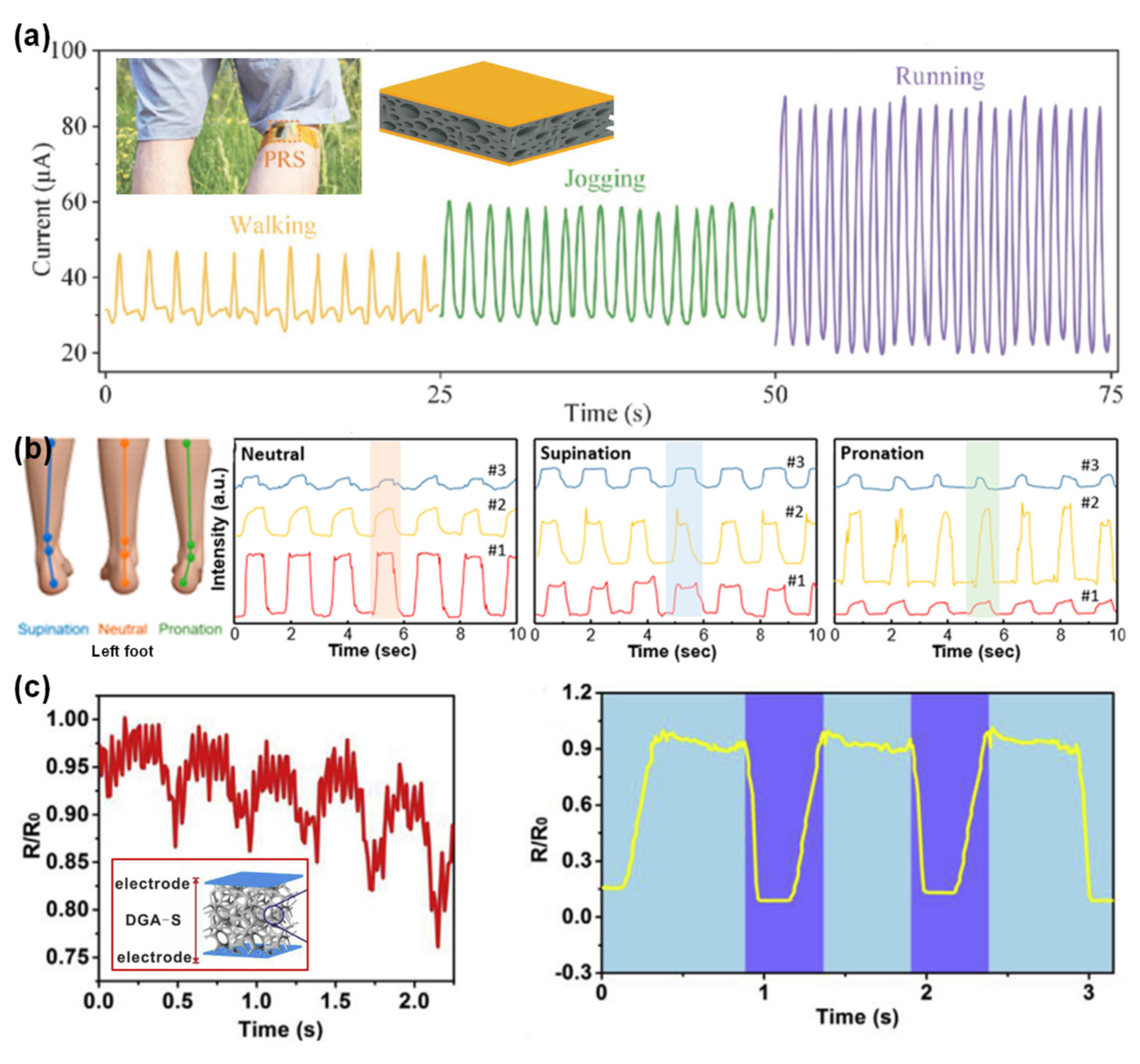
3.1.5. Walking and Running
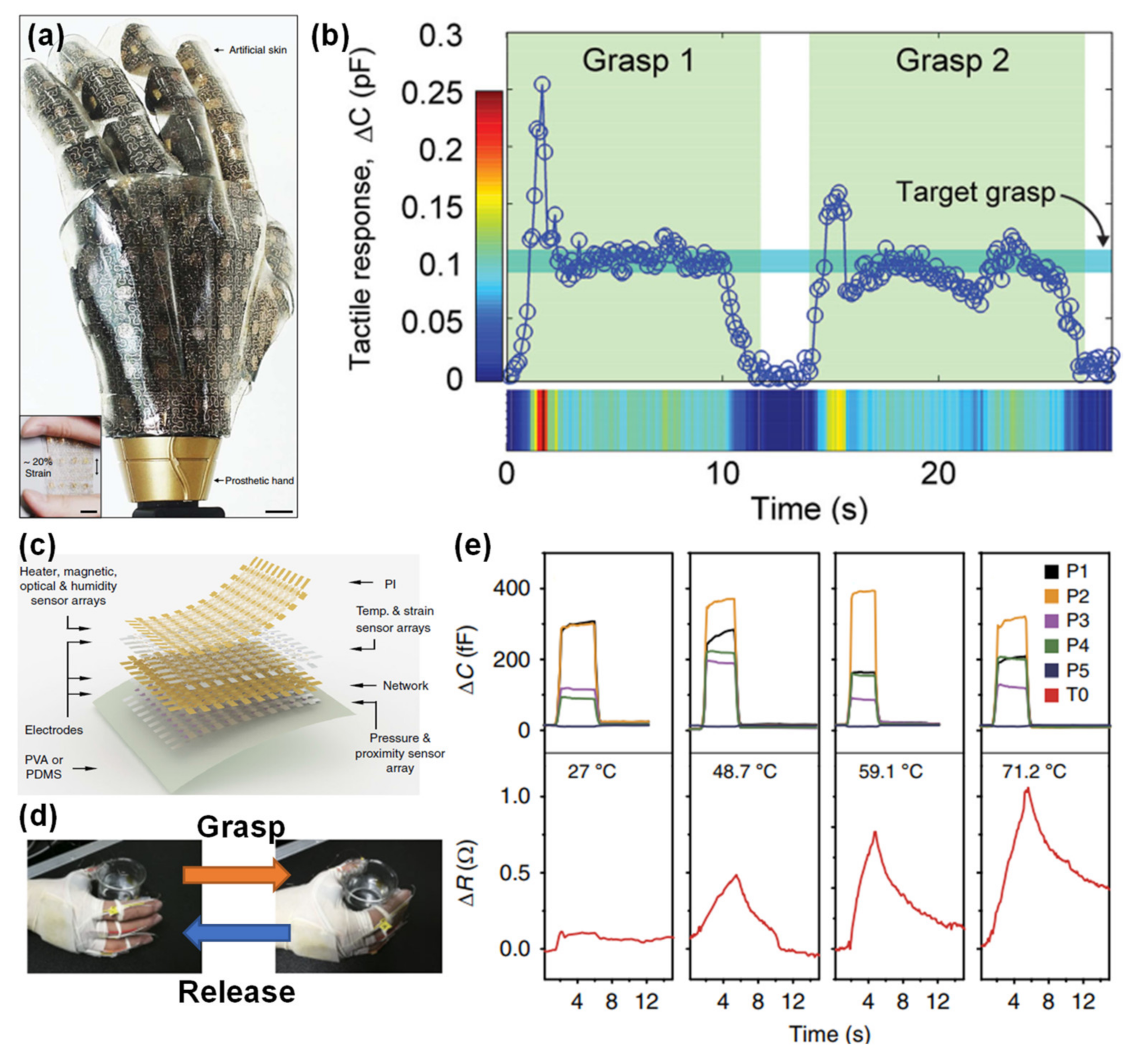
3.2. Functional Prosthesis and Robotics
3.3. Human-Machine-Interfaces
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Sensitivity | A measure of the capability of a sensor to transduce a pressure stimulus. It corresponds to the slope of a linear regression to the data plotted as relative output change versus pressure. Sensitivity can be calculated according to: where S is the sensitivity of the sensor, X is the quantitative output signal of the sensor, P is the applied pressure, and X0 is the output of the device in the absence of P. X typically corresponds to resistance (R), current (I), or capacitance (C) measurements. |
| Linearity | The degree to which the performance of a sensor is close to a linear behavior, in a specific pressure range. Given than a sensor is more accurate and reliable in its linear range, the greater the linear range of a sensor the better. |
| Limit of Detection | The smallest pressure that the sensor can distinguish from background noise. |
| Hysteresis | This phenomenon is the incapability of a sensor to return to its original state when the pressure is removed, and it is commonly associated to the viscoelasticity of the materials that compose the sensor. For a pressure sensor it is desirable to have a hysteresis as low as possible so that the performance is reproducible. |
| Response Time | The time spent by the sensor from the instant when it is subjected to a pressure until reaching 90% of a stable output for that pressure, being also negatively affected by the viscoelasticity of the materials. |
| Relaxation Time | The time spent by the sensor to recover its initial state once the stimulus is removed. |
| Endurance/Stability | Evaluated by the number of loading and unloading cycles a sensor may be subjected without significant differences in its output regarding the first solicitations. |
Appendix B
 —Breathing;
—Breathing;  —Functional Prosthesis;
—Functional Prosthesis;  —Health Monitoring;
—Health Monitoring;  —Human Machine Interfaces;
—Human Machine Interfaces;  —Muscle Movements;
—Muscle Movements;  —Pressure Mapping; ♡—Pulse wave pressure at the wrist/neck/arm/ankle/head or heart rate;
—Pressure Mapping; ♡—Pulse wave pressure at the wrist/neck/arm/ankle/head or heart rate;  —Robots;
—Robots;  —Sound monitoring;
—Sound monitoring;  —Speech;
—Speech;  —Temperature Mapping or Monitoring;
—Temperature Mapping or Monitoring;  —Vibration Monitoring; Health Monitoring;
—Vibration Monitoring; Health Monitoring;  —Walking. Abbreviations and acronyms: Ag—Silver; Al—Aluminum; AR—Aspect Ratio; Au—Gold; B—Bending; CNTs—Carbon Nanotubes; Cu—Copper; elec.—Electrode(s); Electrospin.—Electrospinning; FEP—Fluorinated Ethylene Propylene; IL—Ionic Liquid; ITO—Indium Tin Oxide; L—Loading; LOD—Limit of Detection; MOSFET—Silicon Metal Oxide Semiconductor Field Effect Transistor; MWCNTs—Multi-walled Carbon Nanotubes; Ni—Nickel; NPs—Nanoparticles; NRs—Nanorods; NWs—Nanowires; OFET—Organic Field-Effect Transistor; OTFT—Organic Thin Film Transistor; P(VDF-HFP)—Poly(vinylidene fluorideco-hexafluoropropene); P(VDF-TrFE)—Poly(vinylidenefluoride-co-trifluoroethylene); PANI—Polyaniline; PDMS—Polydimethylsiloxane; PEDOT:PSS—Poly(3,4-ethylenedioxythiophene)–Poly(styrenesulfonate); PEN—Polyethylene Naphthalene; PET—Polyethylene terephthalate; Photolit.—Photolithography; PI—Polyimide; PLLA—Poly(L-lactide); PMMA—Poly(methyl methacrylate); PPy—Polypyrrole; PS—Polystyrene; Pt—Platinum; PTFE—Polytetrafluoroethylene; PU—Polyurethane; PUD—Polyurethane Dispersion; PVA—Polyvinyl Alcohol; PVDF—Poly(vinylidene fluoride); PVP—Poly(4-vinylphenol); PZT—Lead Zirconate Titanate; Rel.—Relaxation; Res.—Response; rGO—reduced Graphene Oxide; S—Stretching; SWCNTs—Single-walled Carbon Nanotubes; Ti—Titanium; TPU—Thermoplastic Urethane Polymer; ZnO—Zinc Oxide.
—Breathing; —Functional Prosthesis; —Health Monitoring; —Human Machine Interfaces; —Muscle Movements; —Pressure Mapping; ♡—Pulse wave pressure at the wrist/neck/arm/ankle/head or heart rate; —Robots; —Sound monitoring; —Speech; —Temperature Mapping or Monitoring; —Vibration Monitoring; Health Monitoring; —Walking. Abbreviations and acronyms: Ag—Silver; Al—Aluminum; AR—Aspect Ratio; Au—Gold; B—Bending; CNTs—Carbon Nanotubes; Cu—Copper; elec.—Electrode(s); Electrospin.—Electrospinning; FEP—Fluorinated Ethylene Propylene; IL—Ionic Liquid; ITO—Indium Tin Oxide; L—Loading; LOD—Limit of Detection; MOSFET—Silicon Metal Oxide Semiconductor Field Effect Transistor; MWCNTs—Multi-walled Carbon Nanotubes; Ni—Nickel; NPs—Nanoparticles; NRs—Nanorods; NWs—Nanowires; OFET—Organic Field-Effect Transistor; OTFT—Organic Thin Film Transistor; P(VDF-HFP)—Poly(vinylidene fluorideco-hexafluoropropene); P(VDF-TrFE)—Poly(vinylidenefluoride-co-trifluoroethylene); PANI—Polyaniline; PDMS—Polydimethylsiloxane; PEDOT:PSS—Poly(3,4-ethylenedioxythiophene)–Poly(styrenesulfonate); PEN—Polyethylene Naphthalene; PET—Polyethylene terephthalate; Photolit.—Photolithography; PI—Polyimide; PLLA—Poly(L-lactide); PMMA—Poly(methyl methacrylate); PPy—Polypyrrole; PS—Polystyrene; Pt—Platinum; PTFE—Polytetrafluoroethylene; PU—Polyurethane; PUD—Polyurethane Dispersion; PVA—Polyvinyl Alcohol; PVDF—Poly(vinylidene fluoride); PVP—Poly(4-vinylphenol); PZT—Lead Zirconate Titanate; Rel.—Relaxation; Res.—Response; rGO—reduced Graphene Oxide; S—Stretching; SWCNTs—Single-walled Carbon Nanotubes; Ti—Titanium; TPU—Thermoplastic Urethane Polymer; ZnO—Zinc Oxide.
—Walking. Abbreviations and acronyms: Ag—Silver; Al—Aluminum; AR—Aspect Ratio; Au—Gold; B—Bending; CNTs—Carbon Nanotubes; Cu—Copper; elec.—Electrode(s); Electrospin.—Electrospinning; FEP—Fluorinated Ethylene Propylene; IL—Ionic Liquid; ITO—Indium Tin Oxide; L—Loading; LOD—Limit of Detection; MOSFET—Silicon Metal Oxide Semiconductor Field Effect Transistor; MWCNTs—Multi-walled Carbon Nanotubes; Ni—Nickel; NPs—Nanoparticles; NRs—Nanorods; NWs—Nanowires; OFET—Organic Field-Effect Transistor; OTFT—Organic Thin Film Transistor; P(VDF-HFP)—Poly(vinylidene fluorideco-hexafluoropropene); P(VDF-TrFE)—Poly(vinylidenefluoride-co-trifluoroethylene); PANI—Polyaniline; PDMS—Polydimethylsiloxane; PEDOT:PSS—Poly(3,4-ethylenedioxythiophene)–Poly(styrenesulfonate); PEN—Polyethylene Naphthalene; PET—Polyethylene terephthalate; Photolit.—Photolithography; PI—Polyimide; PLLA—Poly(L-lactide); PMMA—Poly(methyl methacrylate); PPy—Polypyrrole; PS—Polystyrene; Pt—Platinum; PTFE—Polytetrafluoroethylene; PU—Polyurethane; PUD—Polyurethane Dispersion; PVA—Polyvinyl Alcohol; PVDF—Poly(vinylidene fluoride); PVP—Poly(4-vinylphenol); PZT—Lead Zirconate Titanate; Rel.—Relaxation; Res.—Response; rGO—reduced Graphene Oxide; S—Stretching; SWCNTs—Single-walled Carbon Nanotubes; Ti—Titanium; TPU—Thermoplastic Urethane Polymer; ZnO—Zinc Oxide.
—Breathing; —Functional Prosthesis; —Health Monitoring; —Human Machine Interfaces; —Muscle Movements; —Pressure Mapping; ♡—Pulse wave pressure at the wrist/neck/arm/ankle/head or heart rate; —Robots; —Sound monitoring; —Speech; —Temperature Mapping or Monitoring; —Vibration Monitoring; Health Monitoring; —Walking. Abbreviations and acronyms: Ag—Silver; Al—Aluminum; AR—Aspect Ratio; Au—Gold; B—Bending; CNTs—Carbon Nanotubes; Cu—Copper; elec.—Electrode(s); Electrospin.—Electrospinning; FEP—Fluorinated Ethylene Propylene; IL—Ionic Liquid; ITO—Indium Tin Oxide; L—Loading; LOD—Limit of Detection; MOSFET—Silicon Metal Oxide Semiconductor Field Effect Transistor; MWCNTs—Multi-walled Carbon Nanotubes; Ni—Nickel; NPs—Nanoparticles; NRs—Nanorods; NWs—Nanowires; OFET—Organic Field-Effect Transistor; OTFT—Organic Thin Film Transistor; P(VDF-HFP)—Poly(vinylidene fluorideco-hexafluoropropene); P(VDF-TrFE)—Poly(vinylidenefluoride-co-trifluoroethylene); PANI—Polyaniline; PDMS—Polydimethylsiloxane; PEDOT:PSS—Poly(3,4-ethylenedioxythiophene)–Poly(styrenesulfonate); PEN—Polyethylene Naphthalene; PET—Polyethylene terephthalate; Photolit.—Photolithography; PI—Polyimide; PLLA—Poly(L-lactide); PMMA—Poly(methyl methacrylate); PPy—Polypyrrole; PS—Polystyrene; Pt—Platinum; PTFE—Polytetrafluoroethylene; PU—Polyurethane; PUD—Polyurethane Dispersion; PVA—Polyvinyl Alcohol; PVDF—Poly(vinylidene fluoride); PVP—Poly(4-vinylphenol); PZT—Lead Zirconate Titanate; Rel.—Relaxation; Res.—Response; rGO—reduced Graphene Oxide; S—Stretching; SWCNTs—Single-walled Carbon Nanotubes; Ti—Titanium; TPU—Thermoplastic Urethane Polymer; ZnO—Zinc Oxide.| Type of Sensor | Group, Year | Description | Micro-Structuring Technique | Sensitivity (kPa−1), Range of Pressures (kPa) | LOD/Maximum Pressure Tested | Res./Rel. Times (ms) | Stability | Operating Voltage/Energy Consumption | Application |
|---|---|---|---|---|---|---|---|---|---|
| C | Z. Bao [24] 2010 | OFET, whose dielectric layer is PDMS with micro-pyramids (6 µm of width). | Photolit. | 0.55 (0–2) | 3 Pa/ 40 kPa | <300/ <500 | 104 (L) 15,000 (B) | - 20 V/- | |
| C | Z. Bao [84] 2011 | Ecoflex, and elec. of SWCNTs on PDMS. | - | 2.23 × 10−4 (50–1000) | 50 kPa/ 1 MPa | <125/ <125 | 4 (L) 4 (S) | -/- | |
| C | Z. Bao [30] 2013 | OTFT, whose dielectric layer is PDMS with triangular lines (7 µm of width, 7 µm of height). | Photolit. | 8.2 (0–8) 0.38 (8–50) | ~ 200 Pa/ 56 kPa | <1/<10 | 15,000 (L) | - 100 V/1 mW | (♡) |
| C | D. Zhu [276] 2015 | Flexible suspended gate OTFT. | - | 192 (0.1–5) | 0.3 Pa/ 5 kPa | <10/<10 | 105 (L) | - 60 V/<1 mW | (♡) |
| C | Y. Hong [75] 2015 | PMMA or PVP, and elec. of PDMS micro-structures (6 µm of height) coated with Ag NWs, and Ag on arylite. | UV/O3 treatment | 3.8 (0.045–0.5) 0.8 (0.5–2.5) 0.35 (2.5–4.5) | 45 Pa/ 10 kPa | <150/ <150 | 1500 (L) 5000 (B) | 0.1 V/- | |
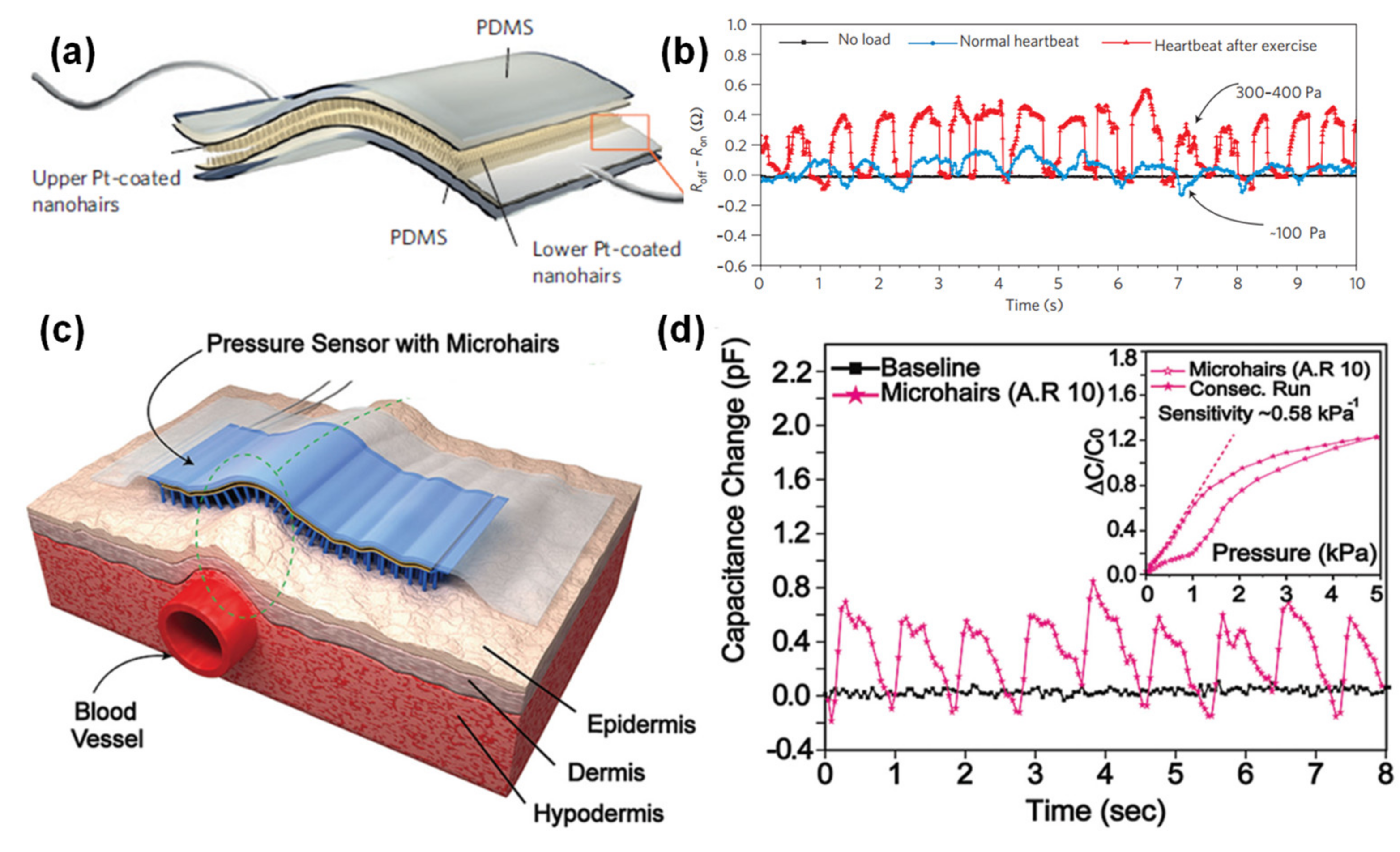
| C | Z. Bao [165] 2015 | PDMS pyramids (6 µm of width, 3 µm of height), PDMS microhairs (30 µm of diameter, AR of 3, 6, and 10), and elec. of PEN and Au. | Photolit. | 0.55–0.58 (0–1) | ~ 100 Pa/ 10 kPa | -/<30 | 3000 (L) | 1 V/- | (♡) |
| C | S. P. Lacour [36] 2015 | Porous silicone foam with Au elec. | Foam | 1 × 10−2–1 × 10−3 (5–405) | 2 kPa/ 405 kPa | 7/14 | 250,000 (L) | -/- | |
| C | S.-D. Lee [72] 2016 | Porous PDMS between glass or PET, and ITO elec. | Water mixing and heat | 1.18 (0–0.02) | 20 Pa/ 5 kPa | 150/150 | - | -/- | |
| C | P. Zhu [82] 2017 | PVDF dielectric layer, PDMS waves (2.6 µm of width, 800 nm of height), with Ag NWs as elec. | Stretching and plasma treatment | 2.94 ± 0.25 (0–2) 0.75 ± 0.06 (2–6.7) | 3 Pa/ 6.7 kPa | <50/<50 | 103 (L) 103 (B) | -/- | () |
| C | C. F. Guo [43] 2018 | Ionic gel [P(VDF-HFP) and IL] micro-cones (25 µm of height), with elec. of Ag NWs on PI. | Leaf as mold | 54.31 (0–0.5) 30.11 (0.5–10) 8.42 (10–40) 1.03 (40–115) | 0.1 Pa/ 115 kPa | 29/37 | 5400 (L) | -/- | () |
| C | C. F. Guo [173] 2018 | PDMS micro-towers (6.5 µm of diameter, 14 µm of height) covered with Ag NWs, and Ag NWs on PI. | Lotus leave as mold | 1.194 (0–2) 0.077 (2–13) | 0.8 Pa/ 13 kPa | 36/58 | 105 (L) | -/- | () |
| C | Z. L. Wang [273] 2018 | Ecoflex, and Ag elec. | - | 0.0224 (0–16) 1.25 × 10−3 (16–360) | 7.3 Pa/ 360 kPa | -/- | - | -/- | |
| C | C. F. Guo [277] 2018 | Rose petal or leaf, or Acacia Mill leaf, with elec. of Ag NWs on PI. | Rose petals and plants leaves | 1.54 (0–1) 0.068 (1–40) 0.014 (40–115) | 0.6 Pa/ 115 kPa | -/- | 5000 (L) 5000 (B) | -/- | () |
| C | V. Palaniappan [251] 2019 | PDMS micro-pyramids, with elec. of Ag on PET, in interlocked design. | Laser engraved mold | 2.2 × 10−3 (0.075–0.17) | 75 Pa/ 170 Pa | -/- | - | -/- | (♡) |
| C | G. Xing [199] 2019 | Polyurethane sponge covered with a composite of silicone rubber, MWCNTs, and graphene nanoplates. | Sponge | 0.062 (0–0.3) 0.033 (0.3–4.5) | 3 Pa/ 4.5 kPa | 45/83 | 2000 (L) | -/- | (♡ ) |
| C | J. Y. Park [33] 2019 | Ionic gel [P(VDF-HFP) and IL] micro-structures (26 µm of size), with elec. of Ag NWs on PDMS. | Sandpaper as mold | 131.5 (0–1.5) 11.73 (5–28) | 1.12 Pa/ 32 kPa | 43/71 | 7000 (L) | 0.5 V/- | (♡) |
| C | R.-W. Li [86] 2020 | Micro-needles (diameter between 166 µm and 422 µm, height between 275 µm and 856 µm) of PDMS and Ni-coated magnetic particles of Ag. | Self-assembly | 0.159 (0–1) 0.019 (1.5–11) 4.1 × 10−3 (12–145) | 1.9 Pa/ 145 kPa | 49/51 | 9200 (L) | -/- | () |
| C | C. F. Guo [171] 2020 | Iontronic protrusions, and elec. of Au on PI. | Sandpaper as mold | 3302.9 (0–10) 671.7 (10–100) 229.9 (100–360) | 0.08 Pa/ 360 kPa | 9/18 | 5000 (L) 2000 (B) | -/- | (♡) |
| C | M. Zhang [278] 2020 | Parylene with elec. of Au-coated PDMS micro-pyramids (35 µm of width, 24.7 µm of height) and ITO on PET. | Photolit. | 70.6 (0–0.05) 3.3 (0.05–0.325) | 1 Pa/ 325 Pa | -/- | 10,200 (L) | -/- | (♡) |
| C | T. Lee [177] 2020 | PDMS hierarchical interlocked micro-structures, with elec. of ITO on PET. | Rose petals as mold | 0.055 (2–10) | -/10 kPa | 300/250 | - | 1 V/- | (♡) |
| C or PR | S. Park [85] 2019 | Porous PDMS micro-pyramids (50 µm of width), with elec. of ITO on PET (for C sensor), or covered with PPy, with patterned elec. (for PR sensor). | Photolit. | 44.5 (0–0.1) (C) 449 (0–0.01) (PR) | 0.14 Pa/ 35 kPa (C) or 600 Pa (PR) | 50/100 (C) 9/30 (PR) | 5000 (L) (C) | 1 V/- (C, PR) | (♡) |
| PE | J. A. Rogers [104] 2013 | Aligned fiber of P(VDF-TrFE). | Electrospin. | 0.79 V kPa−1 (0–0.012) 1.1 V kPa−1 (0.4–2) | 0.1 Pa/ 2 kPa | -/- | 103 (B) | -/- | |
| PE | J. A. Rogers [90] 2014 | Array of PZT squares connected to the gate elec. of a MOSFET. | - | 2 µA Pa−1 (0.002–0.01) | 0.005 Pa/ 10 Pa | 0.1/- | 103 (L) | -/- | (♡) |
| PE | N.-E. Lee [106] 2015 | OFET array with P(VDF-TrFE) micro-pyramids (4 µm of width, 2.5 µm of height) as gate dielectric. | Photolit. | 1.016 (0.02–0.08) 0.028 (10–100) | 20 Pa/ 20 kPa | 20/- | 104 (B) | -/10 µW | (♡) |
| PE | K. J. Lee [89] 2017 | PZT thin film on PET, with elec. of Au. | - | 0.018 (1–30) | 1 kPa/ 60 kPa | 60/- | 5 000 (L) | -/- | (♡) |
| PE | Q.-L. Zhao [91] 2017 | PZT NWs on planar interdigitated Pt/Ti elec. | - | 0.14 V kPa−1 (15–70) | 15 kPa/ 70 kPa | -/- | 105 (L) | -/- | - |
| PE | D. Mandal [279] 2017 | Fish gelatin nanofibers. | Electrospin. | 0.8 V kPa−1 (0.3–10) | 2 Pa/ 25 kPa | 16/- | 108,000 (L) | -/- | (♡) |
| PE | D. Mandal [272] 2017 | Electrospun PLLA nanofibers. | Electrospin. | 3 V kPa−1 | 18 Pa/ 300 kPa | -/- | 375,000 (L) | -/- | (♡) |
| PR | K.-Y. Suh [131] 2012 | Interlocked array of PU nanohairs (50 nm of diameter, 1 µm of height) coated with Pt. | Photolit. | - | 5 Pa/ 1.5 kPa | 50/- | 8000 (L) | -/- | (♡) |
| PR | J.-J. Park [125] 2014 | PDMS micro-pyramids (8 µm of width, 4 µm of height) covered with PEDOT:PSS/PUD. | Photolit. | 4.88 (0.37–5.9) | 23 Pa/ 8 kPa | 200/200 | 800 (S) | 0.2 V/- | (♡) |
| PR | X. Chen [126] 2014 | PDMS micro-pyramids (4.5 µm of width) covered with rGO and elec. of ITO on PET. | Photolit. | −5.5 (0–0.1) −0.01 (0.1–1.5) | 1.5 Pa/ 1.5 kPa | 0.2/- | 5000 (L) | 1 V/- | - |
| PR | W. Cheng [38] 2014 | PDMS microdomains (18 µm of diameter, 16 µm of height) covered with Au. | Mimosa leaves as mold | 50.17 (0–0.07) 1.38 (0.2–1.5) 0.04 (2–10) | 10.4 Pa/ 10 kPa | 20/- | 104 (L) 5000 (B) | 0.1 V/- | |
| PR | W. Cheng [217] 2014 | Interdigitated elec. on PDMS sheet with Au NWs coated tissue paper. | Fabric | 1.14 (0–5) | 13 Pa/ 5 kPa | -/17 | 50,000 (L) 5000 (B) | 1.5 V/30 µW | (♡) |
| PR | X. Chen [127] 2014 | Silicon micropillars (20 µm of diameter, 17 µm of height) covered with Au, and a PPy film on PDMS. | Photolit. | −1.8 (0–0.35) | 2 Pa/ 10 kPa | <100/ <100 | - | -/- | - |
| PR | D.-H. Kim [42] 2014 | Porous MWCNTs@PDMS with elec. of conductive carbon fabric. | Reverse micelles | - | 250 Pa/ 260 kPa | -/- | 16 (L) | 0.1 V/1 W | |
| PR | Z. Bao [41] 2014 | ITO on PET and Cu foil as elec. and interconnected hollow-sphere structures of PPy hydrogel micro-structured into triangular lines (0.5 mm in height, 1 mm of width). | Photolit. | 56–133.1 (0–0.030) | 0.8 Pa/ 10 kPa | 50/50 | 8000 (L) | -/- | |
| PR | D.-H. Kim [35] 2014 | Single crystalline silicon nanoribbon with linear or serpentine shapes. | - | 4.1 × 10−3 (0–200) | -/200 kPa | -/- | - | -/- | |
| PR | H. Ko [133] 2014 | Interlocked array of MWCNTs@PDMS microdomes (4 µm of diameter, 3 µm of height). | Photolit. | −15.1 (0–0.5) | 0.23 Pa/ 59 kPa | 40/40 | 103 (L) | 10 V/- | () |
| PR | H. Ko [132] 2014 | Interlocked array of MWCNTs@PDMS micropillars (5 µm of diameter, 6 µm of height) with Cu elec. | Photolit. | −22.8 (0–0.05) | 10 Pa/ 17 kPa | 110/130 | - | 10 V/- | |
| PR | T. Zhang [179] 2014 | PDMS with micro-structures (11 µm of width, 3.2 µm of height) covered with SWCNTs. | Silk as mold | 1.8 (0–0.3) | 0.6 Pa/ 1 kPa | 10/- | 67,500 (L) | 2 V/- | (♡) |
| PR | T.-L. Ren [280] 2015 | Carbon black@rubber micro-structures (17 µm of height) with Cu elec. | Abrasive grains as mold | 13.8 (0–14.5) | <1 kPa/ 14 kPa | 23/- | 400 (L) | -/- | - |
| PR | J. S. Ha [31] 2015 | PDMS micropillars (50 µm of diameter, 48 µm of height) covered with Au, and PANI fibers on PET. | Photolit. | 2 (0–0.22) 0.87 (0.22–1) | 15 Pa/ 9 kPa | 50/- | 104 (L) | 1 V/- | (♡) |
| PR | T.-L. Ren [274] 2015 | Two interlocked films of graphene micro-structures (20 µm of width, 11 µm of height). | DVD laser-scribing | 0.96 (0–50) 5 × 10−3 (50–113) | -/113 kPa | 72/0.4 | 102 (L) | -/- | |
| PR | R. Jelinek [193] 2015 | Au-coated amine-functionalized PU sponge with Cu elec. | Sponge | −0.31 (0–2) −0.02 (2–10) | 10 Pa/ 10 kPa | 8/- | 103 (L) | -/- | (♡) |
| PR | K. Cho [139] 2016 | PDMS hierarchical micro-domes (59 µm of diameter) with interdigitated graphene elec. | Photolit. | 8.5 (0–12) | 1 Pa/ 12 kPa | 40/30 | 104 (L) | 1 V/- | (♡) |
| PR | N. Zhao [32] 2016 | Nonwoven wood pulp/polyester textile with carbon black particles, and elec. of Au on PI. | Fabric | 0.585 (0–35) | -/35 kPa | 4/4 | 5800 (L) | 1 mV/3 nW | (♡) |
| PR | T. Liu [275] 2016 | Graphitic structures in PI. | Direct laser writing | - | -/- | -/- | 104 (L) | -/- | (♡) |
| PR | Y.-F. Chen [271] 2016 | Ag NWs@PDMS, and conductive threads as bottom elec. in a cloth substrate. | - | 1.04 × 104–9.3 × 105 (0–0.1) 2.72 × 106–6.57 × 106 (0.38–3) | 0.6 Pa/ 5 kPa | 4/16 | 5000 (L) | 0.1 V/- | () |
| PR | H. Zhang [232] 2017 | PDMS sponge covered with CNTs, with elec. of ITO on PET. | Cube sugar as template | 0.03 (0–15) 4.8 × 10−3 (25–50) | 26 Pa/ 150 kPa | 300/100 | 2000 (L) | 2 V/- | (♡) |
| PR | B. Yu [19] 2017 | PDMS micro-pyramids (10 µm of width, height) covered with MWCNTs, and elec. of Au/Ni on PET. | Photolit. | −9.95 (0–0.1) −1.5 × 10−2 (0.175–0.6) | 20 Pa/ 600 Pa | <200/- | 20 (L) | 1 V/- | - |
| PR | Y. Lin [129] 2017 | PDMS micro-pyramids (11 µm of width, 7.4 µm of height) covered with SWCNTs, and elec. of ITO on PET. | Photolit. | 2760 (0–0.4) 8656 (0.4–0.9) 1875 (0.9–1.2) | 7.3 Pa/ 1.2 kPa | <4/- | 104 (L) | 30 V/26.4 nW | (♡) |
| PR | N.-J. Cho [140] 2017 | MWCNTs@PDMS@Sunflower pollen microcapsules, film of PDMS with micro-cubes (150 µm of width), and Cu elec. | Nylon mesh as mold | 56.36 (0–1) 2.51 (2–10) | 1.6 Pa/ 10 kPa | 500/300 | 25,000 (L) | -/- | (♡) |
| PR | S. Jeon [161] 2017 | PDMS micro-pyramids (20 µm of width) covered with PEDOT:PSS/PUD + Ag NPs. | Photolit. | 2.5 (0–0.25) | 3 Pa/5 kPa | 20/20 | 105 (L) | 0.5 mV/- | (♡) |
| PR | M. Khine [183] 2017 | Interlocked design of PDMS films covered with wrinkled CNT film. | Heat and shrinking | 278.5 (0–0.002) 13.2 (0.002–0.025) | 0.5 Pa/ 12 kPa | <20/- | 500 (L) | 1 V/- | (♡) |
| PR | Z. Tang [189] 2017 | Wrinkled graphene films separated by a layer of porous anodic Al oxide. | Chemical synthesis | 6.92 (0.3–1.5) 0.14 (1.5–4.5) | 300 Pa/ 8 kPa | -/- | 105 (L) | 1 V/- | - |
| PR | G. Shen [239] 2017 | Film of PANI hollow nanospheres (≈ 414 µm of diameter), MWCNTs, and PVDF, sandwiched between elec. of Au on PDMS. | PS spheres as template | 31.6 (0–0.25) 10.61 (1–7) | 0.6 Pa/ 50 kPa | 100/150 | 15,000 (L) | 1 V/- | (♡) |
| PR | N. Zhao [281] 2017 | Fibers of nylon covered with Cu and doped with carbon black particles and PVDF, with interdigitated elec. of Au on PI. | Nylon fibers | ≈ 1 (0–70) | -/60 kPa | 2/2 | 22,000 (L) | 1 V/- | (♡) |
| PR | J. Sun [270] 2017 | PDMS mountain (220 µm of width, 30 µm of height) with secondary (35 µm of width, 12 µm of height) and tertiary ridges, and Ag elec. | Banana leave as mold | 10 (0–0.4) 3.3 (0.4–1) 0.33 (1–7) | 1 Pa/7 kPa | 36/30 | 104 (L) | -/- | (♡) |
| PR | R. Igreja [22] 2018 | PDMS micro-cones (221 µm to 367 µm of diameter, 299 µm to 552 µm of height) covered with carbon coating. | Laser engraving | −2.52 (0–0.16) −0.2 (0.2–1.2) −0.01 (1.6–9) | 15 Pa/ 9 kPa | 20/- | - | 1 V/- | (♡) |
| PR | T. Zhang [156] 2018 | Micro-pyramids (≈ 20 µm of width) of PDMS covered with SWCNTs with a substrate of PEN. | Photolit. | −3.26 (0–0.3) −0.025 (0.6–2.5) | -/2.5 kPa | 200/100 | 5000 (L) | 10 V/- | (♡) |
| PR | H. Ko [136] 2018 | MWCNTs@PDMS interlocked micro-domes, micro-pyramids, or micro-pillars (10 µm of diameter/width, 6 µm of height), with Cu elec. | Photolit. | 47 × 103 (0–1) 90 × 103 (1–10) 30 × 103 (10–26) (Micro-domes) | 0.09 Pa/ 26 kPa | 12/12 | 103 (L) | 0.1 V/- | (♡) |
| PR | W. Yang [39] 2018 | Two micro-structured PDMS films covered with Ag NWs in an interlocked design. | Emery paper as mold | 9.8 × 104 (0–0.2) 3.5 × 103 (0.2–20) | 5 Pa/ 20 kPa | <62.5/ <62.5 | 103 (L) | 0.1 V/1.5 nW | () |
| PR | J. Yao [190] 2018 | ZnO NWs sea-urchin like aggregates, between elec. of ITO on PET. | Chemical synthesis | 75–121 (0–0.2) >15 (0.2–10) | 0.015 Pa/ 10 kPa | 7/9 | 2000 (L) | 5 V/- | (♡) |
| PR | Y. Gao [205] 2018 | Carbonized melamine foam. | Foam | 100.29 (0.003–2) 21.22 (2–10) | 3 Pa/ 10 kPa | -/- | 11,000 (L) | 0.1 V/ - | (♡) |
| PR | S. J. Oh [191] 2018 | Conductive Ag nanocrystals on a PDMS film with triangular lines (1 mm of width, 0.5 mm of height), with spacers of insulating Ag nanocrystals. | Self-assembly | 2.72 × 104 (0–5) 4.70 × 103 (5–20) 1.09 × 102 (20–100) | 10 Pa/ 100 kPa | 200/50 | 200 (L) | 0.001 V/ <100 nW | (♡) |
| PR | X. Peng [229] 2018 | Carbon aerogel with cellulose nanocrystals with elec. of Ni on PET. | Freeze-drying | 103.5 (0–0.01) 27.5 (0.01–18) | 1 Pa/ 18 kPa | -/- | 50,000 (L) | 1 V/- | (♡) |
| PR | Y. Fan [282] 2018 | Carbonized lignin@PDMS. | - | 57 (0–2) | 500 Pa/ 130 kPa | 60/40 | 105 (L) | 1 V/- | (♡) |
| PR | S. Shiratori [143] 2018 | Two PDMS films micro-structured into fish-scales (0.62 µm of height), covered with PEDOT:PSS and graphene nanosheets, facing each other. | Surface tension | −70.86 (0–1) −1.15 (2–5) | 100 Pa/ 5 kPa | 82.6/- | - | -/- | (♡) |
| PR | Y.-J. Yang [181] 2018 | MWCNTs@PDMS interlocked micro-domes (3 µm of diameter), with Au elec. | Nylon membrane filter as mold | −6.08 (0–0.15) | -/8.5 kPa | -/- | 104 (L) | -/- | (♡) |
| PR | F. Xuan [37] 2018 | Triangular lines of PDMS (10 µm to 14 µm of width, 28 µm to 39 µm of height) covered with CNTs as bottom elec., and smooth PDMS covered with CNTs as top elec. | Laser engraving | −0.11 (0.005–2) −1.28 × 10−3 (10–50) | 5 Pa/ 50 kPa | 200/150 | 104 (L) | 1 V/- | (♡) |
| PR | L. Li [283] 2018 | Pyramid-like structures (4 µm of height) of MWCNTs@PDMS, with an elec. of Au and other of ITO on PET. | Silicon as mold | 474 (0–0.4) 14.7 (0.4–1.4) 8.4 (5–110) | 0.6 Pa/ 110 kPa | 0.002/ 0.074 | 103 (L) | 1 V–5 V/- | (♡) |
| PR | N. Liu [284] 2018 | NWs of PVA sandwiched between interdigitated elec. of Ag/Ni and a wrinkled rGO film. | - | 4.52 (0–3) 28.34 (3–10) | 2.24 Pa/ 14 kPa | 87–155/- | 6000 (L) | 0.1 V/- | (♡) |
| PR | L. Li [285] 2018 | Micro-pyramids of PDMS covered with PPy, with co-planar Au elec. | Photolit. | 1907.2 (0–0.1) 461.5 (0.1–1) 230.1 (1–1.9) | 0.08 Pa/ 1.9 kPa | 0.05/6.2 | 15,000 (L) | 1 V/- | (♡) |
| PR | J. Li [195] 2018 | Sea sponges with polydopamine, rGO, and Ag NWs. | Sponge | 0.016 (0–40) | 0.28 Pa/ 40 kPa | -/54 | 7000 (L) | -/- | () |
| PR | T.-L. Ren [168] 2018 | Micro-structures of PDMS coated with rGO, in interlocked geometry. | Sandpaper as mold | 25.1 (0–2.6) 0.45 (10–40) | 16 Pa/ 40 kPa | 120/80 | 3000 (L) | -/- | (♡) |
| PR | R. Igreja [247] 2019 | PDMS semi-spheres (320 µm to 340 µm of diameter, 105 µm to 155 µm of height) coated with carbon coating. | Laser engraving | −0.18 (0–0.4) −6.4 × 10−3 (1.2–100) | 79 Pa/ 100 kPa | -/28 | 27,500 (L) | 5 V–10 V/- | |
| PR | W. Lu [182] 2019 | Micro-structured PDMS covered with graphene, with interdigitated elec. of Ni/Au. | Silk as mold | 1875.5 (0–20) 853.2 (20–40) | 1.8 Pa/ 40 kPa | 2/3 | 15,000 (L) | 1 V/- | (♡) |
| PR | X. Wang [286] 2019 | PDMS with graphene protrusions. | Laser scribing | 480 (0–0.1) 34 (0.1–0.4) 0.9 (0.4–1) | 28 Pa/ 1 kPa | 0.002/ 0.002 | 4000 (L) | 5 V/160 µW | (♡) |
| PR | D. Zeng [130] 2019 | PDMS micro-structures (250 µm, 60 µm, or 15 µm as average height) covered with rGO, with elec. of Au on PI. | Sandpaper as mold | 2.5 (0–1) 12 (1–50) 1051 (50–200)470 (200–400) | 10 Pa/ 400 kPa | 150/40 | 104 (L) | 1 V/- | (♡) |
| PR | V. Roy [170] 2019 | Micro-structured foam (top and bottom sides) of PDMS and graphite, with elec. of ITO on PET. | Sandpaper as mold | 245 (0–120) 90 (120–150) | 5 Pa/ 150 kPa | 8/4 | 25,000 (L) | -/- | (♡) |
| PR | Z. Peng [144] 2019 | Porous matrix of TPU@NaCl@carbon black particles, with elec. of TPU@Ag particles. | 3D printed mold | 5.54 (0–10) 0.123 (10–100) 4.8 × 10−3 (100–800) | 10 Pa/ 800 kPa | 20/30 | 104 (L) | 0.3 V/- | (♡) |
| PR | C. Yang [287] 2019 | Au-coated PDMS conical frustum-like structures, with interdigitated elec. of SnSe2 nanoplates covered with Au. | Photolit. | 433.22 (0–2.4) 2.91 (5–40) | 0.82 Pa/ 40 kPa | 0.07/0.09 | 4000 (L) | -/- | (♡) |
| PR | F. Xuan [250] 2019 | PDMS long or short micro-ridges (19.1 µm of width, 20.2 µm of height, 1 mm or 100.5 µm of length), or micro-domes (22.8 µm of diameter, 19.5 µm of height) covered with CNTs. | Laser engraving | −1.82 (0–2) −9.1 × 10−4 (10–80) | 1 Pa/ 80 kPa | 36/52 | 6000 (L) | -/- | (♡) |
| PR | W. Huang [212] 2019 | Ag interdigitated elec. on cellulose paper, and porous tissue paper coated with Ag NWs. | Tissue paper | 1.5 (0.03–30) | 30 Pa/ 30 kPa | 90/90 | - | 0.1 V/10 nW | (♡) |
| PR | Y. Tian [288] 2019 | PDMS micro-pillars (500 µm of diameter, 200 µm of height) covered with Ag NWs in interlocked array. | Photolit. | 20.08 (0.05–0.8) 3.81 (0.8–2.1) | 20 Pa/ 8 kPa | -/- | 104 (L) | 1 V/- | () |
| PR | C. Pang [164] 2019 | PDMS film with micro-pillars on top (30 µm of diameter, 15 µm or 30 µm of height) and hexagonal structures on bottom (200 µm of width, AR of 1.5), and elec. of graphene on PDMS. | Photolit. | 0.015 (0–8) 2 × 10−4 (8–20) | 20 Pa/ 370 kPa | 11/5 | 103 (L) | -/- | - |
| PR | B. Zhou [252] 2019 | PDMS micro-domes (1000 µm of diameter) with hierarchical pillars (50 µm of diameter), covered with Ag NWs, in interlocked geometry. | Laser cutting and Photolit. | 374.5 (0–0.3) 3.86 (0.3–20) 0.63 (20–80) | 2.5 Pa/ 80 kPa | -/- | 104 (L) | 1 V/- | (♡) |
| PR | P. Liu [244] 2020 | NaOH modified tissue paper with silicon rubber, carbon black, and graphene nanoplates as active layer, silicon rubber micro-domes, and interdigitated elec. of Au on PI. | 3D printed mold and tissue paper | 37.5 (0–2) 2.75 (2–10) | 5 Pa/ 10 kPa | 50/30 | 3000 (L) | -/- | (♡) |
| PR | T. Zhang [253] 2020 | PDMS semi-spheres (280 µm of diameter, 200 µm of height) with micro-structures covered with rGO, with interdigitated elec. of Ag NWs. | Laser engraving | 15.4 (0–200) | 16 Pa/ 300 kPa | 15/20 | 7500 (L) | 1 V/- | (♡) |
| PR & PE | H. Ko [87] 2015 | Interlocked array of PDMS micropillars (10 µm of diameter, 10 µm of height) covered with ZnO NWs (coated with Pt or Ni). | Photolit. | −6.8 (0–0.3) −1 × 10−2 (0.3–4.6) −6.78 × 10−5 (4.6–13.1) | 0.6 Pa/ 13 kPa | 5/- | 103 (L) | 10 V/- | |
| PR & PE | H. Ko [88] 2015 | Interlocked array of rGO@PVDF microdomes (10 µm of diameter, 4 µm of height). | Photolit. | - | 0.6 Pa/ 49.5 kPa | -/- | 5000 (L) | -/- | (♡) |
| PR & PE | J. Jang [99] 2016 | ZnO NRs covered with PVDF, and elec. of rGO. | Chemical synthesis | - | 4 Pa/20 Pa | 120/- | 103 (L) | -/- | (♡) |
| TE | Z. L. Wang [150] 2013 | PDMS film with micro-pyramids (10 µm of width), with an elec. of Au and another elec. of Al with Ag NWs and NPs. | Photolit. | 0.31 (0–3) 0.01 (3–12) | 2.1 Pa/ 12 kPa | <5/<5 | 30,000 (L) | -/- | |
| TE | Z. L. Wang [153] 2016 | PET film, a micro-structured PDMS film, and Ag elec. | Dry etching | 0.06 (1–80) | 1 kPa/ 200 kPa | 70/- | 104 (L) | -/- | |
| TE | L. Wang [269] 2016 | Rough PET (40 µm of dimension, 0.8 µm of depth) coated with Al, and elec. of Al on PTFE. | Chemical etching | - | - | 1/- | - | -/- | (♡) |
| TE | Z. L. Wang [154] 2017 | PDMS film with micro-pyramids (80 µm of width), Ag elec., and SiO2 as insulator. | Photolit. | 6 × 10−3 (0–40) | 600 Pa/ 200 kPa | 50/- | - | -/- | |
| TE | S.-W. Kim [289] 2017 | Transistor with an ion-gel gate dielectric. | - | 0.02 (0–10) | <1 kPa/ 57 kPa | 30/- | 1700 (L) | 0.5 V/180 µW | |
| TE | Y. Zhang [290] 2017 | PDMS film with elec. of carbon fiber. | - | 0.055 nA kPa−1 (28.2–41.6) | 800 Pa/ 41.6 kPa | 68/- | 104 (L) | -/- | |
| TE | Z. L. Wang [291] 2017 | PDMS or VHB, and hydrogel of polyacrylamide with LiCl as elec. | - | 0.013 (1.3–70) | 1.3 kPa/ 100 kPa | -/- | 20,000 (L) 103 (S) | -/- | |
| TE | Z. L. Wang [20] 2018 | Silk, nylon, and an elec. of CNTs. | Fabric | 0.0479 (0–125) 0.0186 (125–350) 0.0033 (350–650) | -/650 kPa | -/- | 104 (L) | -/- | |
| TE | H. Ko [147] 2018 | P(VDF-TrFE) and PDMS films with interlocked semi-spheres (100 µm of diameter, 120 µm of height). | Photolit. | 0.55 V kPa−1 (0–19.8) 0.2 V kPa−1 (19.8–98) | -/98 kPa | -/- | 104 (L) | -/- | (♡) |
| TE | Z. L. Wang [40] 2018 | Ecoflex with triangular microprisms (1.24 mm of width, 1.64 mm of height), with an elec. of Ag flakes on ecoflex. | Laser grinding machine | 0.29 (0–5) 0.005 (5–25) | 63 Pa/ 320 kPa | -/- | 103 (L) | -/- | (♡) |
| TE | Z. L. Wang [265] 2018 | PTFE strips with NWs (110 nm of diameter, 0.8 µm of height), with interlaced woven structure on PET, and ITO elec. | Plasma dry etching | 45.7 V kPa−1 (0–0.71) 10.6 V kPa−1 (0.71–1.25) | 2.5 Pa/ 1.25 kPa | 5/- | 40,000 (L) | -/- | (♡) |
| TE | J. Zhou [292] 2018 | EVA/Ag film with hollow micro-spheres (750 µm of diameter, 300 µm of height) in both surfaces, with an outer sheet of FEP/Ag. | Hot pressing | 18.98 V kPa−1 (0.5–1) 0.77 V kPa−1 (1.6–10) 0.25 V kPa−1 (10–40) | 500 Pa/ 40 kPa | -/- | - | -/- | (♡) |
| TE | Z. L. Wang [176] 2019 | Two PDMS films with micro-cones (25.4 µm of diameter, 25.7 µm of height) in interlocked geometry, one covered with Ag NWs and the other covered with PTFE bumps, and a back elec. | Leaf as mold | 127.22 V kPa−1 (5–50) | 5 kPa/ 50 kPa | -/- | 5000 (L) | -/- | |
| TE | X. Chou [293] 2020 | PDMS micro-frustum film (14 µm of width, 5 µm of height) covered with Cu with another PDMS micro-frustum film covered with P(VDF-TrFE) in interlocked geometry, and a spacer. | Photolit. | 56.7 mV kPa−1 (0–600) 15.6 mV kPa−1 (700–1000) | -/1 MPa | 60/- | 80,000 (L) | -/- | (♡) |
References
- Guyton, A.C.; Hall, J.E. Textbook of Medical Physiology, 11th ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2006; ISBN 0-7216-0240-1. [Google Scholar]
- Schmidt, R.F. Fundamentals of Sensory Physiology, 2nd ed.; Springer: New York, NY, USA, 1981; ISBN 9783540103493. [Google Scholar]
- Takei, K.; Honda, W.; Harada, S.; Arie, T.; Akita, S. Toward Flexible and Wearable Human-Interactive Health-Monitoring Devices. Adv. Healthc. Mater. 2015, 4, 487–500. [Google Scholar] [CrossRef]
- Hammock, M.L.; Chortos, A.; Tee, B.C.-K.; Tok, J.B.-H.; Bao, Z. 25th Anniversary Article: The Evolution of Electronic Skin (E-Skin): A Brief History, Design Considerations, and Recent Progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef]
- Wang, X.; Dong, L.; Zhang, H.; Yu, R.; Pan, C.; Wang, Z.L. Recent Progress in Electronic Skin. Adv. Sci. 2015, 2, 1500169. [Google Scholar] [CrossRef]
- Branchet, M.C.; Boisnic, S.; Frances, C.; Robert, A.M. Skin Thickness Changes in Normal Aging Skin. Gerontology 1990, 36, 28–35. [Google Scholar] [CrossRef] [PubMed]
- Pawlaczyk, M.; Lelonkiewicz, M.; Wieczorowski, M. Age-dependent biomechanical properties of the skin. Adv. Dermatology Allergol. 2013, 5, 302–306. [Google Scholar] [CrossRef] [PubMed]
- Oltulu, P.; Ince, B.; Kokbudak, N.; Findik, S.; Kilinc, F. Measurement of epidermis, dermis, and total skin thicknesses from six different body regions with a new ethical histometric technique. Turkish J. Plast. Surg. 2018, 26, 56. [Google Scholar] [CrossRef]
- Chopra, K.; Calva, D.; Sosin, M.; Tadisina, K.K.; Banda, A.; De La Cruz, C.; Chaudhry, M.R.; Legesse, T.; Drachenberg, C.B.; Manson, P.N.; et al. A Comprehensive Examination of Topographic Thickness of Skin in the Human Face. Aesthetic Surg. J. 2015, 35, 1007–1013. [Google Scholar] [CrossRef] [PubMed]
- Panero, E.; Muscolo, G.G.; Pastorelli, S.; Gastaldi, L. Model Based Analysis of Trunk Exoskeleton for Human Efforts Reduction. In Advances in Service and Industrial Robotics; Berns, K., Görges, D., Eds.; Springer: Cham, Switzerland, 2020; pp. 410–418. ISBN 978-3-030-19648-6. [Google Scholar]
- Mitsubayashi, K.; Suzuki, M.; Tamiya, E.; Karube, I. Analysis of metabolites in sweat as a measure of physical condition. Anal. Chim. Acta 1994, 289, 27–34. [Google Scholar] [CrossRef]
- Bandodkar, A.J.; Wang, J. Non-invasive wearable electrochemical sensors: A review. Trends Biotechnol. 2014, 32, 363–371. [Google Scholar] [CrossRef]
- Emaminejad, S.; Gao, W.; Wu, E.; Davies, Z.A.; Yin Yin Nyein, H.; Challa, S.; Ryan, S.P.; Fahad, H.M.; Chen, K.; Shahpar, Z.; et al. Autonomous sweat extraction and analysis applied to cystic fibrosis and glucose monitoring using a fully integrated wearable platform. Proc. Natl. Acad. Sci. USA 2017, 114, 4625–4630. [Google Scholar] [CrossRef]
- Lee, H.; Song, C.; Hong, Y.S.; Kim, M.S.; Cho, H.R.; Kang, T.; Shin, K.; Choi, S.H.; Hyeon, T.; Kim, D.-H. Wearable/disposable sweat-based glucose monitoring device with multistage transdermal drug delivery module. Sci. Adv. 2017, 3, e1601314. [Google Scholar] [CrossRef] [PubMed]
- Piro, B.; Mattana, G.; Noël, V. Recent Advances in Skin Chemical Sensors. Sensors 2019, 19, 4376. [Google Scholar] [CrossRef] [PubMed]
- Hou, C.; Huang, T.; Wang, H.; Yu, H.; Zhang, Q.; Li, Y. A strong and stretchable self-healing film with self-activated pressure sensitivity for potential artificial skin applications. Sci. Rep. 2013, 3. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.-H.; Lu, N.; Ma, R.; Kim, Y.-S.; Kim, R.-H.; Wang, S.; Wu, J.; Won, S.M.; Tao, H.; Islam, A.; et al. Epidermal Electronics. Science 2011, 333, 838–843. [Google Scholar] [CrossRef] [PubMed]
- Kaltenbrunner, M.; Sekitani, T.; Reeder, J.; Yokota, T.; Kuribara, K.; Tokuhara, T.; Drack, M.; Schwödiauer, R.; Graz, I.; Bauer-Gogonea, S.; et al. An ultra-lightweight design for imperceptible plastic electronics. Nature 2013, 499, 458–463. [Google Scholar] [CrossRef]
- Li, X.; Huang, W.; Yao, G.; Gao, M.; Wei, X.; Liu, Z.; Zhang, H.; Gong, T.; Yu, B. Highly sensitive flexible tactile sensors based on microstructured multiwall carbon nanotube arrays. Scr. Mater. 2017, 129, 61–64. [Google Scholar] [CrossRef]
- Cao, R.; Pu, X.; Du, X.; Yang, W.; Wang, J.; Guo, H.; Zhao, S.; Yuan, Z.; Zhang, C.; Li, C.; et al. Screen-Printed Washable Electronic Textiles as Self-Powered Touch/Gesture Tribo-Sensors for Intelligent Human–Machine Interaction. ACS Nano 2018, 12, 5190–5196. [Google Scholar] [CrossRef]
- Bettinger, C.J.; Bao, Z. Organic thin-film transistors fabricated on resorbable biomaterial substrates. Adv. Mater. 2010, 22, 651–655. [Google Scholar] [CrossRef]
- dos Santos, A.; Pinela, N.; Alves, P.; Santos, R.; Fortunato, E.; Martins, R.; Águas, H.; Igreja, R. Piezoresistive E-Skin Sensors Produced with Laser Engraved Molds. Adv. Electron. Mater. 2018, 4, 1800182–1800192. [Google Scholar] [CrossRef]
- Carlson, B.M. (Ed.) Skin. In The Human Body; Elsevier: Amsterdam, The Netherlands, 2019; pp. 65–85. ISBN 9780128042540. [Google Scholar]
- Mannsfeld, S.C.B.; Tee, B.C.-K.; Stoltenberg, R.M.; Chen, C.V.H.-H.; Barman, S.; Muir, B.V.O.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Gerling, G.J.; Thomas, G.W. The effect of fingertip microstructures on tactile edge perception. First Jt. Eurohaptics Conf. Symp. Haptic Interfaces Virtual Environ. Teleoperator Syst. 2005, 63–72. [Google Scholar]
- Lacour, S.P.; Wagner, S.; Huang, Z.; Suo, Z. Stretchable gold conductors on elastomeric substrates. Appl. Phys. Lett. 2003, 82, 2404–2406. [Google Scholar] [CrossRef]
- Wagner, S.; Lacour, S.P.; Jones, J.; Hsu, P.I.; Sturm, J.C.; Li, T.; Suo, Z. Electronic skin: Architecture and components. Phys. E Low-dimensional Syst. Nanostructures 2004, 25, 326–334. [Google Scholar] [CrossRef]
- Someya, T.; Sekitani, T.; Iba, S.; Kato, Y.; Kawaguchi, H.; Sakurai, T. A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications. Proc. Natl. Acad. Sci. USA 2004, 101, 9966–9970. [Google Scholar] [CrossRef]
- Someya, T.; Kato, Y.; Sekitani, T.; Iba, S.; Noguchi, Y.; Murase, Y.; Kawaguchi, H.; Sakurai, T. Conformable, flexible, large-area networks of pressure and thermal sensors with organic transistor active matrixes. Proc. Natl. Acad. Sci. USA 2005, 102, 12321–12325. [Google Scholar] [CrossRef]
- Schwartz, G.; Tee, B.C.-K.; Mei, J.; Appleton, A.L.; Kim, D.H.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859–1867. [Google Scholar] [CrossRef]
- Park, H.; Jeong, Y.R.; Yun, J.; Hong, S.Y.; Jin, S.; Lee, S.-J.; Zi, G.; Ha, J.S. Stretchable Array of Highly Sensitive Pressure Sensors Consisting of Polyaniline Nanofibers and Au-Coated Polydimethylsiloxane Micropillars. ACS Nano 2015, 9, 9974. [Google Scholar] [CrossRef]
- Luo, N.; Dai, W.; Li, C.; Zhou, Z.; Lu, L.; Poon, C.C.Y.; Chen, S.-C.; Zhang, Y.; Zhao, N. Flexible Piezoresistive Sensor Patch Enabling Ultralow Power Cuffless Blood Pressure Measurement. Adv. Funct. Mater. 2016, 26, 1178–1187. [Google Scholar] [CrossRef]
- Chhetry, A.; Kim, J.; Yoon, H.; Park, J.Y. Ultrasensitive Interfacial Capacitive Pressure Sensor Based on a Randomly Distributed Microstructured Iontronic Film for Wearable Applications. ACS Appl. Mater. Interfaces 2019, 11, 3438–3449. [Google Scholar] [CrossRef]
- Carvalho, A.F.; Fernandes, A.J.S.; Leitão, C.; Deuermeier, J.; Marques, A.C.; Martins, R.; Fortunato, E.; Costa, F.M. Laser-Induced Graphene Strain Sensors Produced by Ultraviolet Irradiation of Polyimide. Adv. Funct. Mater. 2018, 28, 1805271. [Google Scholar] [CrossRef]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable silicon nanoribbon electronics for skin prosthesis. Nat. Commun. 2014, 5, 5747–5758. [Google Scholar] [CrossRef] [PubMed]
- Gerratt, A.P.; Michaud, H.O.; Lacour, S.P. Elastomeric Electronic Skin for Prosthetic Tactile Sensation. Adv. Funct. Mater. 2015, 25, 2287–2295. [Google Scholar] [CrossRef]
- Lu, C.; Gao, Y.; Yu, G.; Xu, M.; Tan, J.; Xuan, F. Laser-microengineered flexible electrodes with enhanced sensitivity for wearable pressure sensors. Sens. Actuators A Phys. 2018, 281, 124–129. [Google Scholar] [CrossRef]
- Su, B.; Gong, S.; Ma, Z.; Yap, L.W.; Cheng, W. Mimosa-inspired design of a flexible pressure sensor with touch sensitivity. Small 2015, 11, 1886–1891. [Google Scholar] [CrossRef]
- Pu, J.-H.; Zha, X.-J.; Tang, L.-S.; Bai, L.; Bao, R.-Y.; Liu, Z.-Y.; Yang, M.-B.; Yang, W. Human Skin-Inspired Electronic Sensor Skin with Electromagnetic Interference Shielding for the Sensation and Protection of Wearable Electronics. ACS Appl. Mater. Interfaces 2018, 10, 40880–40889. [Google Scholar] [CrossRef]
- Lai, Y.-C.; Deng, J.; Liu, R.; Hsiao, Y.-C.; Zhang, S.L.; Peng, W.; Wu, H.-M.; Wang, X.; Wang, Z.L. Actively Perceiving and Responsive Soft Robots Enabled by Self-Powered, Highly Extensible, and Highly Sensitive Triboelectric Proximity- and Pressure-Sensing Skins. Adv. Mater. 2018, 30, 1801114. [Google Scholar] [CrossRef]
- Pan, L.; Chortos, A.; Yu, G.; Wang, Y.; Isaacson, S.; Allen, R.; Shi, Y.; Dauskardt, R.; Bao, Z. An ultra-sensitive resistive pressure sensor based on hollow-sphere microstructure induced elasticity in conducting polymer film. Nat. Commun. 2014, 5, 3002–3010. [Google Scholar] [CrossRef]
- Jung, S.; Kim, J.H.; Kim, J.; Choi, S.; Lee, J.; Park, I.; Hyeon, T.; Kim, D.-H. Reverse-Micelle-Induced Porous Pressure-Sensitive Rubber for Wearable Human-Machine Interfaces. Adv. Mater. 2014, 26, 4825–4830. [Google Scholar] [CrossRef]
- Qiu, Z.; Wan, Y.; Zhou, W.; Yang, J.; Yang, J.; Huang, J.; Zhang, J.; Liu, Q.; Huang, S.; Bai, N.; et al. Ionic Skin with Biomimetic Dielectric Layer Templated from Calathea Zebrine Leaf. Adv. Funct. Mater. 2018, 28, 1802343. [Google Scholar] [CrossRef]
- Kumar, R.; Mutreja, S. Electronic Skin Market by Application (Personal Healthcare Monitoring, Wearable Technology, and Others)—Global Opportunities Analysis and Industry Forecast 2020–2025; Premium Market Insights: Maharashtra, India, 2018. [Google Scholar]
- Zang, Y.; Zhang, F.; Di, C.; Zhu, D. Advances of flexible pressure sensors toward artificial intelligence and health care applications. Mater. Horizons 2015, 2, 140–156. [Google Scholar] [CrossRef]
- Chortos, A.; Liu, J.; Bao, Z. Pursuing prosthetic electronic skin. Nat. Mater. 2016, 15, 937–951. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Lee, Y.; Ha, M.; Cho, S.; Ko, H. Micro/Nanostructured Surfaces for Self-powered and Multifunctional Electronic Skins. J. Mater. Chem. B 2016. [Google Scholar] [CrossRef] [PubMed]
- Trung, T.Q.; Lee, N.-E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoringand Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef]
- Lou, Z.; Wang, L.; Shen, G. Recent Advances in Smart Wearable Sensing Systems. Adv. Mater. Technol. 2018, 3, 1800444. [Google Scholar] [CrossRef]
- Xu, F.; Li, X.; Shi, Y.; Li, L.; Wang, W.; He, L.; Liu, R. Recent Developments for Flexible Pressure Sensors: A Review. Micromachines 2018, 9, 580. [Google Scholar] [CrossRef]
- Almansoori, M.T.; Li, X.; Zheng, L. A Brief Review on E-skin and its Multifunctional Sensing Applications. Curr. Smart Mater. 2019, 4, 3–14. [Google Scholar] [CrossRef]
- Costa, J.C.; Spina, F.; Lugoda, P.; Garcia-Garcia, L.; Roggen, D.; Münzenrieder, N. Flexible Sensors—From Materials to Applications. Technologies 2019, 7, 35. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, T.; Chen, H.; Wang, F.; Pu, Y.; Gao, C.; Li, S. Mini Review on Flexible and Wearable Electronics for Monitoring Human Health Information. Nanoscale Res. Lett. 2019, 14, 263. [Google Scholar] [CrossRef]
- Huang, Y.; Fan, X.; Chen, S.-C.; Zhao, N. Emerging Technologies of Flexible Pressure Sensors: Materials, Modeling, Devices, and Manufacturing. Adv. Funct. Mater. 2019, 29, 1808509. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Y.; Wang, Y.; Xia, K.; Yin, Z.; Wang, H.; Zhang, M.; Liang, X.; Lu, H.; Zhu, M.; et al. Physical sensors for skin-inspired electronics. InfoMat 2020, 2, 184–211. [Google Scholar] [CrossRef]
- Ma, Z.; Li, S.; Wang, H.; Cheng, W.; Li, Y.; Pan, L.; Shi, Y. Advanced electronic skin devices for healthcare applications. J. Mater. Chem. B 2019, 7, 173–197. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.C.; Mun, J.; Kwon, S.Y.; Park, S.; Bao, Z.; Park, S. Electronic Skin: Recent Progress and Future Prospects for Skin-Attachable Devices for Health Monitoring, Robotics, and Prosthetics. Adv. Mater. 2019, 31, 1904765. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Yan, X. Progress in achieving high-performance piezoresistive and capacitive flexible pressure sensors: A review. J. Mater. Sci. Technol. 2020, 43, 175–188. [Google Scholar] [CrossRef]
- Zhang, S.; Li, S.; Xia, Z.; Cai, K. A review of electronic skin: Soft electronics and sensors for human health. J. Mater. Chem. B 2020, 8, 852–862. [Google Scholar] [CrossRef]
- He, J.; Zhang, Y.; Zhou, R.; Meng, L.; Chen, T.; Mai, W.; Pan, C. Recent advances of wearable and flexible piezoresistivity pressure sensor devices and its future prospects. J. Mater. 2020, 6, 86–101. [Google Scholar] [CrossRef]
- Lee, Y.; Park, J.; Choe, A.; Cho, S.; Kim, J.; Ko, H. Mimicking Human and Biological Skins for Multifunctional Skin Electronics. Adv. Funct. Mater. 2020, 30, 1904523. [Google Scholar] [CrossRef]
- Cardoso, A.R.; Marques, A.C.; Santos, L.; Carvalho, A.F.; Costa, F.M.; Martins, R.; Sales, M.G.F.; Fortunato, E. Molecularly-imprinted chloramphenicol sensor with laser-induced graphene electrodes. Biosens. Bioelectron. 2019, 124–125, 167–175. [Google Scholar] [CrossRef]
- Ferreira, G.; Goswami, S.; Nandy, S.; Pereira, L.; Martins, R.; Fortunato, E. Touch-Interactive Flexible Sustainable Energy Harvester and Self-Powered Smart Card. Adv. Funct. Mater. 2020, 30, 1908994. [Google Scholar] [CrossRef]
- Marques, A.; Veigas, B.; Araújo, A.; Pagará, B.; Baptista, P.V.; Águas, H.; Martins, R.; Fortunato, E. Paper-Based SERS Platform for One-Step Screening of Tetracycline in Milk. Sci. Rep. 2019, 9, 17922. [Google Scholar] [CrossRef]
- Nunes, D.; Freire, T.; Barranger, A.; Vieira, J.; Matias, M.; Pereira, S.; Pimentel, A.; Cordeiro, N.J.A.; Fortunato, E.; Martins, R. TiO2 Nanostructured Films for Electrochromic Paper Based-Devices. Appl. Sci. 2020, 10, 1200. [Google Scholar] [CrossRef]
- Marques, A.C.; Cardoso, A.R.; Martins, R.; Sales, M.G.F.; Fortunato, E. Laser-Induced Graphene-Based Platforms for Dual Biorecognition of Molecules. ACS Appl. Nano Mater. 2020, 3, 2795–2803. [Google Scholar] [CrossRef]
- Barras, R.; Cunha, I.; Gaspar, D.; Fortunato, E.; Martins, R.; Pereira, L. Printable cellulose-based electroconductive composites for sensing elements in paper electronics. Flex. Print. Electron. 2017, 2, 014006. [Google Scholar] [CrossRef]
- Samouco, A.; Marques, A.C.; Pimentel, A.; Martins, R.; Fortunato, E. Laser-induced electrodes towards low-cost flexible UV ZnO sensors. Flex. Print. Electron. 2018, 3, 044002. [Google Scholar] [CrossRef]
- Martins, G.V.; Marques, A.C.; Fortunato, E.; Sales, M.G.F. Wax-printed paper-based device for direct electrochemical detection of 3-nitrotyrosine. Electrochim. Acta 2018, 284, 60–68. [Google Scholar] [CrossRef]
- Nunes, D.; Pimentel, A.; Araujo, A.; Calmeiro, T.R.; Panigrahi, S.; Pinto, J.V.; Barquinha, P.; Gama, M.; Fortunato, E.; Martins, R. Enhanced UV Flexible Photodetectors and Photocatalysts Based on TiO2 Nanoplatforms. Top. Catal. 2018, 61, 1591–1606. [Google Scholar] [CrossRef]
- Matias, M.L.; Nunes, D.; Pimentel, A.; Ferreira, S.H.; Borda d’Agua, R.; Duarte, M.P.; Fortunato, E.; Martins, R. Paper-Based Nanoplatforms for Multifunctional Applications. J. Nanomater. 2019, 2019, 1–16. [Google Scholar] [CrossRef]
- Lee, B.-Y.; Kim, J.; Kim, H.; Kim, C.; Lee, S.-D. Low-cost flexible pressure sensor based on dielectric elastomer film with micro-pores. Sens. Actuators A Phys. 2016, 240, 103–109. [Google Scholar] [CrossRef]
- Kang, S.; Lee, J.; Lee, S.; Kim, S.; Kim, J.-K.; Algadi, H.; Al-Sayari, S.; Kim, D.-E.; Kim, D.; Lee, T. Highly Sensitive Pressure Sensor Based on Bioinspired Porous Structure for Real-Time Tactile Sensing. Adv. Electron. Mater. 2016, 2, 1600356. [Google Scholar] [CrossRef]
- Park, S.; Kim, H.; Vosgueritchian, M.; Cheon, S.; Kim, H.; Koo, J.H.; Kim, T.R.; Lee, S.; Schwartz, G.; Chang, H.; et al. Stretchable Energy-Harvesting Tactile Electronic Skin Capable of Differentiating Multiple Mechanical Stimuli Modes. Adv. Mater. 2014, 26, 7324–7332. [Google Scholar] [CrossRef]
- Joo, Y.; Byun, J.; Seong, N.; Ha, J.; Kim, H.; Kim, S.; Kim, T.; Im, H.; Kim, D.; Hong, Y. Silver nanowire-embedded PDMS with a multiscale structure for a highly sensitive and robust flexible pressure sensor. Nanoscale 2015, 7, 6208–6215. [Google Scholar] [CrossRef] [PubMed]
- Boutry, C.M.; Nguyen, A.; Lawal, Q.O.; Chortos, A.; Rondeau-Gagné, S.; Bao, Z. A Sensitive and Biodegradable Pressure Sensor Array for Cardiovascular Monitoring. Adv. Mater. 2015, 27, 6954–6961. [Google Scholar] [CrossRef] [PubMed]
- Chhetry, A.; Yoon, H.; Park, J.Y. A flexible and highly sensitive capacitive pressure sensor based on conductive fibers with a microporous dielectric for wearable electronics. J. Mater. Chem. C 2017, 5, 10068–10076. [Google Scholar] [CrossRef]
- Chen, S.; Li, S.; Peng, S.; Huang, Y.; Zhao, J.; Tang, W.; Guo, X. Silver nanowire/polymer composite soft conductive film fabricated by large-area compatible coating for flexible pressure sensor array. J. Semicond. 2018, 39, 013001. [Google Scholar] [CrossRef]
- He, Z.; Chen, W.; Liang, B.; Liu, C.; Yang, L.; Lu, D.; Mo, Z.; Zhu, H.; Tang, Z.; Gui, X. Capacitive Pressure Sensor with High Sensitivity and Fast Response to Dynamic Interaction Based on Graphene and Porous Nylon Networks. ACS Appl. Mater. Interfaces 2018, 10, 12816–12823. [Google Scholar] [CrossRef]
- Woo, S.-J.; Kong, J.-H.; Kim, D.-G.; Kim, J.-M. A thin all-elastomeric capacitive pressure sensor array based on micro-contact printed elastic conductors. J. Mater. Chem. C 2014, 2, 4415–4422. [Google Scholar] [CrossRef]
- Kim, S.Y.; Park, S.; Park, H.W.; Park, D.H.; Jeong, Y.; Kim, D.H. Highly Sensitive and Multimodal All-Carbon Skin Sensors Capable of Simultaneously Detecting Tactile and Biological Stimuli. Adv. Mater. 2015, 27, 4178–4185. [Google Scholar] [CrossRef]
- Shuai, X.; Zhu, P.; Zeng, W.; Hu, Y.; Liang, X.; Zhang, Y.; Sun, R.; Wong, C. Highly Sensitive Flexible Pressure Sensor Based on Silver Nanowires-Embedded Polydimethylsiloxane Electrode with Microarray Structure. ACS Appl. Mater. Interfaces 2017, 9, 26314. [Google Scholar] [CrossRef]
- Yang, W.; Li, N.-W.; Zhao, S.; Yuan, Z.; Wang, J.; Du, X.; Wang, B.; Cao, R.; Li, X.; Xu, W.; et al. A Breathable and Screen-Printed Pressure Sensor Based on Nanofiber Membranes for Electronic Skins. Adv. Mater. Technol. 2018, 3, 1700241. [Google Scholar] [CrossRef]
- Lipomi, D.J.; Vosgueritchian, M.; Tee, B.C.-K.; Hellstrom, S.L.; Lee, J.A.; Fox, C.H.; Bao, Z. Skin-like pressure and strain sensors based on transparent elastic films of carbon nanotubes. Nat. Nanotechnol. 2011, 6, 788–792. [Google Scholar]
- Yang, J.C.; Kim, J.-O.; Oh, J.; Kwon, S.Y.; Sim, J.Y.; Kim, D.W.; Choi, H.B.; Park, S. Microstructured Porous Pyramid-Based Ultrahigh Sensitive Pressure Sensor Insensitive to Strain and Temperature. ACS Appl. Mater. Interfaces 2019, 11, 19472–19480. [Google Scholar] [CrossRef] [PubMed]
- Asghar, W.; Li, F.; Zhou, Y.; Wu, Y.; Yu, Z.; Li, S.; Tang, D.; Han, X.; Shang, J.; Liu, Y.; et al. Piezocapacitive Flexible E-Skin Pressure Sensors Having Magnetically Grown Microstructures. Adv. Mater. Technol. 2020, 5, 1900934. [Google Scholar] [CrossRef]
- Ha, M.; Lim, S.; Park, J.; Um, D.-S.; Lee, Y.; Ko, H. Bioinspired Interlocked and Hierarchical Design of ZnO Nanowire Arrays for Static and Dynamic Pressure-Sensitive Electronic Skins. Adv. Funct. Mater. 2015, 25, 2841–2849. [Google Scholar] [CrossRef]
- Park, J.; Kim, M.; Lee, Y.; Lee, H.S.; Ko, H. Fingertip skin-inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv. 2015, 1, e1500661. [Google Scholar] [CrossRef] [PubMed]
- Park, D.Y.; Joe, D.J.; Kim, D.H.; Park, H.; Han, J.H.; Jeong, C.K.; Park, H.; Park, J.G.; Joung, B.; Lee, K.J. Self-Powered Real-Time Arterial Pulse Monitoring Using Ultrathin Epidermal Piezoelectric Sensors. Adv. Mater. 2017, 29, 1702308–1702317. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Su, Y.; Joe, P.; Yona, R.; Liu, Y.; Kim, Y.-S.; Huang, Y.; Damadoran, A.R.; Xia, J.; Martin, L.W.; et al. Conformable amplified lead zirconate titanate sensors with enhanced piezoelectric response for cutaneous pressure monitoring. Nat. Commun. 2014, 5. [Google Scholar] [CrossRef]
- Zhao, Q.-L.; He, G.-P.; Di, J.-J.; Song, W.-L.; Hou, Z.-L.; Tan, P.-P.; Wang, D.-W.; Cao, M.-S. Flexible Semitransparent Energy Harvester with High Pressure Sensitivity and Power Density Based on Laterally Aligned PZT Single-Crystal Nanowires. ACS Appl. Mater. Interfaces 2017, 9, 24696–24703. [Google Scholar] [CrossRef]
- Pimentel, A.; Samouco, A.; Nunes, D.; Araújo, A.; Martins, R.; Fortunato, E. Ultra-Fast Microwave Synthesis of ZnO Nanorods on Cellulose Substrates for UV Sensor Applications. Materials (Basel) 2017, 10, 1308. [Google Scholar] [CrossRef]
- Figueira, J.; Gaspar, C.; Carvalho, J.T.; Loureiro, J.; Fortunato, E.; Martins, R.; Pereira, L. Sustainable Fully Printed UV Sensors on Cork Using Zinc Oxide/Ethylcellulose Inks. Micromachines 2019, 10, 601. [Google Scholar] [CrossRef]
- Bender, M.; Gagaoudakis, E.; Douloufakis, E.; Natsakou, E.; Katsarakis, N.; Cimalla, V.; Kiriakidis, G.; Fortunato, E.; Nunes, P.; Marques, A.; et al. Production and characterization of zinc oxide thin films for room temperature ozone sensing. Thin Solid Films 2002, 418, 45–50. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, J.; Song, J.; Liu, J.; Xu, N.; Wang, Z.L. Piezoelectric Field Effect Transistor and Nanoforce Sensor Based on a Single ZnO Nanowire. Nano Lett. 2006, 6, 2768–2772. [Google Scholar] [CrossRef] [PubMed]
- Pimentel, A.C.; Gonçalves, A.; Marques, A.; Martins, R.; Fortunato, E. Zinc Oxide Thin Films used as an Ozone Sensor at Room Temperature. MRS Proc. 2006, 915, 0915-R07-04. [Google Scholar] [CrossRef]
- Zhu, G.; Yang, R.; Wang, S.; Wang, Z.L. Flexible High-Output Nanogenerator Based on Lateral ZnO Nanowire Array. Nano Lett. 2010, 10, 3151–3155. [Google Scholar] [CrossRef] [PubMed]
- Pimentel, A.; Nunes, D.; Duarte, P.; Rodrigues, J.; Costa, F.M.; Monteiro, T.; Martins, R.; Fortunato, E. Synthesis of Long ZnO Nanorods under Microwave Irradiation or Conventional Heating. J. Phys. Chem. C 2014, 118, 14629–14639. [Google Scholar] [CrossRef]
- Shin, K.-Y.; Lee, J.S.; Jang, J. Highly sensitive, wearable and wireless pressure sensor using free-standing ZnO nanoneedle/PVDF hybrid thin film for heart rate monitoring. Nano Energy 2016, 22, 95–104. [Google Scholar] [CrossRef]
- Yang, X.; Daoud, W.A. Triboelectric and Piezoelectric Effects in a Combined Tribo-Piezoelectric Nanogenerator Based on an Interfacial ZnO Nanostructure. Adv. Funct. Mater. 2016, 26, 8194–8201. [Google Scholar] [CrossRef]
- Pimentel, A.; Ferreira, S.; Nunes, D.; Calmeiro, T.; Martins, R.; Fortunato, E. Microwave Synthesized ZnO Nanorod Arrays for UV Sensors: A Seed Layer Annealing Temperature Study. Materials (Basel). 2016, 9, 299. [Google Scholar] [CrossRef]
- Shin, S.-H.; Kim, Y.-H.; Lee, M.H.; Jung, J.-Y.; Nah, J. Hemispherically Aggregated BaTiO 3 Nanoparticle Composite Thin Film for High-Performance Flexible Piezoelectric Nanogenerator. ACS Nano 2014, 8, 2766–2773. [Google Scholar] [CrossRef]
- Lapčinskis, L.; Ma̅lnieks, K.; Linarts, A.; Blu̅ms, J.; Šmits, K.; Järvekülg, M.; Knite, M.; Šutka, A. Hybrid Tribo-Piezo-Electric Nanogenerator with Unprecedented Performance Based on Ferroelectric Composite Contacting Layers. ACS Appl. Energy Mater. 2019, 2, 4027–4032. [Google Scholar] [CrossRef]
- Persano, L.; Dagdeviren, C.; Su, Y.; Zhang, Y.; Girardo, S.; Pisignano, D.; Huang, Y.; Rogers, J.A. High performance piezoelectric devices based on aligned arrays of nanofibers of poly(vinylidenefluoride-co-trifluoroethylene). Nat. Commun. 2013, 4, 1633–1643. [Google Scholar] [CrossRef]
- Mao, Y.; Zhao, P.; McConohy, G.; Yang, H.; Tong, Y.; Wang, X. Sponge-Like Piezoelectric Polymer Films for Scalable and Integratable Nanogenerators and Self-Powered Electronic Systems. Adv. Energy Mater. 2014, 4, 1301624. [Google Scholar] [CrossRef]
- Kim, D.-I.; Quang Trung, T.; Hwang, B.-U.; Kim, J.-S.; Jeon, S.; Bae, J.; Park, J.-J.; Lee, N.-E. A Sensor Array Using Multi-functional Field-effect Transistors with Ultrahigh Sensitivity and Precision for Bio-monitoring. Sci. Rep. 2015, 5, 12705. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.-H.; Yoon, H.-J.; Kim, T.Y.; Gupta, M.K.; Lee, J.H.; Seung, W.; Ryu, H.; Kim, S.-W. Micropatterned P(VDF-TrFE) Film-Based Piezoelectric Nanogenerators for Highly Sensitive Self-Powered Pressure Sensors. Adv. Funct. Mater. 2015, 25, 3203–3209. [Google Scholar] [CrossRef]
- Ye, S.; Cheng, C.; Chen, X.; Chen, X.; Shao, J.; Zhang, J.; Hu, H.; Tian, H.; Li, X.; Ma, L.; et al. High-performance piezoelectric nanogenerator based on microstructured P(VDF-TrFE)/BNNTs composite for energy harvesting and radiation protection in space. Nano Energy 2019, 60, 701–714. [Google Scholar] [CrossRef]
- Rovisco, A.; dos Santos, A.; Cramer, T.; Martins, J.; Branquinho, R.; Águas, H.; Fraboni, B.; Fortunato, E.; Martins, R.; Igreja, R.; et al. Piezoelectricity Enhancement of Nanogenerators Based on PDMS and ZnSnO 3 Nanowires through Microstructuration. ACS Appl. Mater. Interfaces 2020, 12, 18421–18430. [Google Scholar] [CrossRef]
- Tang, H.; Zhou, Z.; Sodano, H.A. Large-scale synthesis of Ba x Sr 1−x TiO 3 nanowires with controlled stoichiometry. Appl. Phys. Lett. 2014, 104, 142905. [Google Scholar] [CrossRef]
- Ramadan, K.S.; Sameoto, D.; Evoy, S. A review of piezoelectric polymers as functional materials for electromechanical transducers. Smart Mater. Struct. 2014, 23, 033001. [Google Scholar] [CrossRef]
- Kholkin, A.L.; Pertsev, N.A.; Goltsev, A.V. Piezoelectricity and Crystal Symmetry. In Piezoelectric and Acoustic Materials for Transducer Applications; Safari, A., Akdogan, E.K., Eds.; Springer: Boston, MA, USA, 2008; pp. 17–39. ISBN 978-0-387-76538-9. [Google Scholar]
- Fan, H.J.; Lee, W.; Hauschild, R.; Alexe, M.; Le Rhun, G.; Scholz, R.; Dadgar, A.; Nielsch, K.; Kalt, H.; Krost, A.; et al. Template-Assisted Large-Scale Ordered Arrays of ZnO Pillars for Optical and Piezoelectric Applications. Small 2006, 2, 561–568. [Google Scholar] [CrossRef]
- Wang, Z.L.; Song, J. Piezoelectric Nanogenerators Based on Zinc Oxide Nanowire Arrays. Science 2006, 312, 242–246. [Google Scholar] [CrossRef]
- Lu, M.-P.; Song, J.; Lu, M.-Y.; Chen, M.-T.; Gao, Y.; Chen, L.-J.; Wang, Z.L. Piezoelectric Nanogenerator Using p-Type ZnO Nanowire Arrays. Nano Lett. 2009, 9, 1223–1227. [Google Scholar] [CrossRef]
- Choi, M.-Y.; Choi, D.; Jin, M.-J.; Kim, I.; Kim, S.-H.; Choi, J.-Y.; Lee, S.Y.; Kim, J.M.; Kim, S.-W. Mechanically Powered Transparent Flexible Charge-Generating Nanodevices with Piezoelectric ZnO Nanorods. Adv. Mater. 2009, 21, 2185–2189. [Google Scholar] [CrossRef]
- Kim, K.-H.; Lee, K.Y.; Seo, J.-S.; Kumar, B.; Kim, S.-W. Paper-Based Piezoelectric Nanogenerators with High Thermal Stability. Small 2011, 7, 2577–2580. [Google Scholar] [CrossRef] [PubMed]
- Lee, M.; Chen, C.-Y.; Wang, S.; Cha, S.N.; Park, Y.J.; Kim, J.M.; Chou, L.-J.; Wang, Z.L. A Hybrid Piezoelectric Structure for Wearable Nanogenerators. Adv. Mater. 2012, 24, 1759–1764. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Bae, S.-H.; Lin, L.; Yang, Y.; Park, C.; Kim, S.-W.; Cha, S.N.; Kim, H.; Park, Y.J.; Wang, Z.L. Super-Flexible Nanogenerator for Energy Harvesting from Gentle Wind and as an Active Deformation Sensor. Adv. Funct. Mater. 2013, 23, 2445–2449. [Google Scholar] [CrossRef]
- Ko, Y.H.; Nagaraju, G.; Lee, S.H.; Yu, J.S. PDMS-based Triboelectric and Transparent Nanogenerators with ZnO Nanorod Arrays. ACS Appl. Mater. Interfaces 2014, 6, 6631–6637. [Google Scholar] [CrossRef] [PubMed]
- Fiorillo, A.S.; Critello, C.D.; Pullano, A.S. Theory, technology and applications of piezoresistive sensors: A review. Sens. Actuators A Phys. 2018, 281, 156–175. [Google Scholar] [CrossRef]
- Park, Y.J.; Sharma, B.K.; Shinde, S.M.; Kim, M.-S.; Jang, B.; Kim, J.-H.; Ahn, J.-H. All MoS 2 -Based Large Area, Skin-Attachable Active-Matrix Tactile Sensor. ACS Nano 2019, 13, 3023–3030. [Google Scholar] [CrossRef]
- Li, Y.; Samad, Y.A.; Liao, K. From cotton to wearable pressure sensor. J. Mater. Chem. A 2015, 3, 2181–2187. [Google Scholar] [CrossRef]
- Lin, X.; Gao, S.; Fei, T.; Liu, S.; Zhao, H.; Zhang, T. Study on a paper-based piezoresistive sensor applied to monitoring human physiological signals. Sens. Actuators A Phys. 2019, 292, 66–70. [Google Scholar] [CrossRef]
- Choong, C.-L.; Shim, M.-B.; Lee, B.-S.; Jeon, S.; Ko, D.-S.; Kang, T.-H.; Bae, J.; Lee, S.H.; Byun, K.-E.; Im, J.; et al. Highly Stretchable Resistive Pressure Sensors Using a Conductive Elastomeric Composite on a Micropyramid Array. Adv. Mater. 2014, 26, 3451–3458. [Google Scholar] [CrossRef]
- Zhu, B.; Niu, Z.; Wang, H.; Leow, W.R.; Wang, H.; Li, Y.; Zheng, L.; Wei, J.; Huo, F.; Chen, X. Microstructured Graphene Arrays for Highly Sensitive Flexible Tactile Sensors. Small 2014, 10, 3625–3631. [Google Scholar] [CrossRef] [PubMed]
- Shao, Q.; Niu, Z.; Hirtz, M.; Jiang, L.; Liu, Y.; Wang, Z.; Chen, X. High-Performance and Tailorable Pressure Sensor Based on Ultrathin Conductive Polymer Film. Small 2014, 10, 1466–1472. [Google Scholar] [CrossRef] [PubMed]
- Tai, Y.-L.; Yang, Z.-G. Flexible pressure sensing film based on ultra-sensitive SWCNT/PDMS spheres for monitoring human pulse signals. J. Mater. Chem. B 2015, 3, 5436–5441. [Google Scholar] [CrossRef] [PubMed]
- Huang, Z.; Gao, M.; Yan, Z.; Pan, T.; Khan, S.A.; Zhang, Y.; Zhang, H.; Lin, Y. Pyramid microstructure with single walled carbon nanotubes for flexible and transparent micro-pressure sensor with ultra-high sensitivity. Sens. Actuators A Phys. 2017, 266, 345–351. [Google Scholar] [CrossRef]
- Tang, X.; Wu, C.; Gan, L.; Zhang, T.; Zhou, T.; Huang, J.; Wang, H.; Xie, C.; Zeng, D. Multilevel Microstructured Flexible Pressure Sensors with Ultrahigh Sensitivity and Ultrawide Pressure Range for Versatile Electronic Skins. Small 2019, 15, 1804559. [Google Scholar] [CrossRef]
- Pang, C.; Lee, G.-Y.; Kim, T.; Kim, S.M.; Kim, H.N.; Ahn, S.-H.; Suh, K.-Y. A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibres. Nat. Mater. 2012, 11, 795–801. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Lim, S.; Lee, Y.; Jung, Y.; Lim, H.; Ko, H. Ultrasensitive Piezoresistive Pressure Sensors Based on Interlocked Micropillar Arrays. BioNanoSci 2014, 4, 349–355. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Ha, M.; Jung, Y.D.; Lim, H.; Kim, S.Y.; Ko, H. Giant Tunneling Piezoresistance of Composite Elastomers with Interlocked Microdome Arrays for Ultrasensitive and Multimodal Electronic Skins. ACS Nano 2014, 8, 4689–4697. [Google Scholar] [CrossRef]
- Yin, F.; Yang, J.; Peng, H.; Yuan, W. Flexible and highly sensitive artificial electronic skin based on graphene/polyamide interlocking fabric. J. Mater. Chem. C 2018, 6, 6840–6846. [Google Scholar] [CrossRef]
- Suen, M.-S.; Lin, Y.-C.; Chen, R. A flexible multifunctional tactile sensor using interlocked zinc oxide nanorod arrays for artificial electronic skin. Sens. Actuators A Phys. 2018, 269, 574–584. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.; Hong, J.; Lee, H.; Lee, Y.; Cho, S.; Kim, S.-W.; Kim, J.J.; Kim, S.Y.; Ko, H. Tailoring force sensitivity and selectivity by microstructure engineering of multidirectional electronic skins. NPG Asia Mater. 2018, 10, 163–176. [Google Scholar] [CrossRef]
- Xu, X.; Wang, R.; Nie, P.; Cheng, Y.; Lu, X.; Shi, L.; Sun, J. Copper Nanowire-Based Aerogel with Tunable Pore Structure and Its Application as Flexible Pressure Sensor. ACS Appl. Mater. Interfaces 2017, 9, 14273–14280. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Xu, W.; Yi, W.; Peng, Y. A flexible and highly pressure-sensitive PDMS sponge based on silver nanoparticles decorated reduced graphene oxide composite. Sens. Actuators A Phys. 2019, 291, 23–31. [Google Scholar] [CrossRef]
- Bae, G.Y.; Pak, S.W.; Kim, D.; Lee, G.; Kim, D.H.; Chung, Y.; Cho, K. Linearly and Highly Pressure-Sensitive Electronic Skin Based on a Bioinspired Hierarchical Structural Array. Adv. Mater. 2016, 28, 5300–5306. [Google Scholar] [CrossRef]
- Wang, L.; Jackman, J.A.; Tan, E.-L.; Park, J.H.; Potroz, M.G.; Hwang, E.T.; Cho, N.-J. High-performance, flexible electronic skin sensor incorporating natural microcapsule actuators. Nano Energy 2017, 36, 38–45. [Google Scholar] [CrossRef]
- Yu, G.; Hu, J.; Tan, J.; Gao, Y.; Lu, Y.; Xuan, F. A wearable pressure sensor based on ultra-violet/ozone microstructured carbon nanotube/polydimethylsiloxane arrays for electronic skins. Nanotechnology 2018, 29, 115502–115513. [Google Scholar] [CrossRef]
- Seol, M.-L.; Woo, J.-H.; Lee, D.-I.; Im, H.; Hur, J.; Choi, Y.-K. Nature-Replicated Nano-in-Micro Structures for Triboelectric Energy Harvesting. Small 2014, 10, 3887–3894. [Google Scholar] [CrossRef]
- Wang, J.; Tenjimbayashi, M.; Tokura, Y.; Park, J.-Y.; Kawase, K.; Li, J.; Shiratori, S. Bionic Fish-Scale Surface Structures Fabricated via Air/Water Interface for Flexible and Ultrasensitive Pressure Sensors. ACS Appl. Mater. Interfaces 2018, 10, 30689–30697. [Google Scholar] [CrossRef]
- Wang, Z.; Guan, X.; Huang, H.; Wang, H.; Lin, W.; Peng, Z. Full 3D Printing of Stretchable Piezoresistive Sensor with Hierarchical Porosity and Multimodulus Architecture. Adv. Funct. Mater. 2019, 29, 1807569. [Google Scholar] [CrossRef]
- Sripadmanabhan Indira, S.; Aravind Vaithilingam, C.; Oruganti, K.S.P.; Mohd, F.; Rahman, S. Nanogenerators as a Sustainable Power Source: State of Art, Applications, and Challenges. Nanomaterials 2019, 9, 773. [Google Scholar] [CrossRef]
- Wang, Z.L.; Lin, L.; Chen, J.; Niu, S.; Zi, Y. Triboelectric Nanogenerators; Springer International Publishing: Berlin, Germany, 2016; ISBN 978-3-319-40038-9. [Google Scholar]
- Ha, M.; Lim, S.; Cho, S.; Lee, Y.; Na, S.; Baig, C.; Ko, H. Skin-Inspired Hierarchical Polymer Architectures with Gradient Stiffness for Spacer-Free, Ultrathin, and Highly Sensitive Triboelectric Sensors. ACS Nano 2018, 12, 3964–3974. [Google Scholar] [CrossRef] [PubMed]
- Zhao, G.; Zhang, Y.; Shi, N.; Liu, Z.; Zhang, X.; Wu, M.; Pan, C.; Liu, H.; Li, L.; Wang, Z.L. Transparent and stretchable triboelectric nanogenerator for self-powered tactile sensing. Nano Energy 2019, 59, 302–310. [Google Scholar] [CrossRef]
- Fan, F.-R.; Lin, L.; Zhu, G.; Wu, W.; Zhang, R.; Wang, Z.L. Transparent Triboelectric Nanogenerators and Self-Powered Pressure Sensors Based on Micropatterned Plastic Films. Nano Lett. 2012, 12, 3109–3114. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Xie, Y.; Wang, S.; Wu, W.; Niu, S.; Wen, X.; Wang, Z.L. Triboelectric Active Sensor Array for Self-Powered Static and Dynamic Pressure Detection and Tactile Imaging. ACS Nano 2013, 7, 8266–8274. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhang, H.; Lin, Z.-H.; Zhou, Y.S.; Jing, Q.; Su, Y.; Yang, J.; Chen, J.; Hu, C.; Wang, Z.L. Human Skin Based Triboelectric Nanogenerators for Harvesting Biomechanical Energy and as Self-Powered Active Tactile Sensor System. ACS Nano 2013, 7, 9213–9222. [Google Scholar] [CrossRef]
- Zhu, G.; Yang, W.Q.; Zhang, T.; Jing, Q.; Chen, J.; Zhou, Y.S.; Bai, P.; Wang, Z.L. Self-Powered, Ultrasensitive, Flexible Tactile Sensors Based on Contact Electrification. Nano Lett. 2014, 14, 3208–3213. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Dong, L.; Han, X.; Du, W.; Zhai, J.; Pan, C.; Wang, Z.L. Self-Powered High-Resolution and Pressure-Sensitive Triboelectric Sensor Matrix for Real-Time Tactile Mapping. Adv. Mater. 2016, 28, 2896–2903. [Google Scholar] [CrossRef]
- Wang, X.; Que, M.; Chen, M.; Han, X.; Li, X.; Pan, C.; Wang, Z.L. Full Dynamic-Range Pressure Sensor Matrix Based on Optical and Electrical Dual-Mode Sensing. Adv. Mater. 2017, 29, 1605817. [Google Scholar] [CrossRef]
- Potkay, J.A. Long term, implantable blood pressure monitoring systems. Biomed. Microdevices 2008, 10, 379–392. [Google Scholar] [CrossRef]
- Cao, Y.; Li, T.; Gu, Y.; Luo, H.; Wang, S.; Zhang, T. Fingerprint-Inspired Flexible Tactile Sensor for Accurately Discerning Surface Texture. Small 2018, 14, 1703902. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, S.; Li, H.; Wang, B.; Sun, Y.; Xu, Z.; Chen, X.; Wu, K.; Zhang, X.; Xing, F.; et al. The Semiconductor/Conductor Interface Piezoresistive Effect in an Organic Transistor for Highly Sensitive Pressure Sensors. Adv. Mater. 2018, 31, 1805630. [Google Scholar] [CrossRef]
- Khalili, N.; Shen, X.; Naguib, H.E. An interlocked flexible piezoresistive sensor with 3D micropyramidal structures for electronic skin applications. Soft Matter 2018, 14, 6912–6920. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, P.E.G. Fabrication of Skin-Like Sensors in Thin Polymeric Membranes. Universidade Nova de Lisboa: Lisbon, Portugal, 2019. [Google Scholar]
- Ji, Z.; Zhu, H.; Liu, H.; Liu, N.; Chen, T.; Yang, Z.; Sun, L. The Design and Characterization of a Flexible Tactile Sensing Array for Robot Skin. Sensors 2016, 16, 2001. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.; Jung, M.; Kim, B.; Kim, J.; Shin, K.; Kwon, O.-S.; Jeon, S. Low-voltage, high-sensitivity and high-reliability bimodal sensor array with fully inkjet-printed flexible conducting electrode for low power consumption electronic skin. Nano Energy 2017, 41, 301–307. [Google Scholar] [CrossRef]
- Jung, M.; Kim, K.; Kim, B.; Cheong, H.; Shin, K.; Kwon, O.-S.; Park, J.-J.; Jeon, S. Paper-Based Bimodal Sensor for Electronic Skin Applications. ACS Appl. Mater. Interfaces 2017, 9, 26974–26982. [Google Scholar] [CrossRef] [PubMed]
- Jung, M.; Kim, K.; Kim, B.; Lee, K.-J.; Kang, J.-W.; Jeon, S. Vertically stacked nanocellulose tactile sensor. Nanoscale 2017, 9, 17212–17219. [Google Scholar] [CrossRef]
- Chun, S.; Kim, D.W.; Kim, J.; Pang, C. A transparent, glue-free, skin-attachable graphene pressure sensor with micropillars for skin-elasticity measurement. Nanotechnology 2019, 30, 335501. [Google Scholar] [CrossRef]
- Pang, C.; Koo, J.H.; Nguyen, A.; Caves, J.M.; Kim, M.G.; Chortos, A.; Kim, K.; Wang, P.J.; Tok, J.B.H.; Bao, Z. Highly skin-conformal microhairy sensor for pulse signal amplification. Adv. Mater. 2015, 27, 634–640. [Google Scholar] [CrossRef]
- Sun, Q.-J.; Zhuang, J.; Venkatesh, S.; Zhou, Y.; Han, S.-T.; Wu, W.; Kong, K.-W.; Li, W.-J.; Chen, X.; Li, R.K.Y.; et al. Highly Sensitive and Ultrastable Skin Sensors for Biopressure and Bioforce Measurements Based on Hierarchical Microstructures. ACS Appl. Mater. Interfaces 2018, 10, 4086–4094. [Google Scholar] [CrossRef]
- Gao, Y.; Yu, G.; Tan, J.; Xuan, F. Sandpaper-molded wearable pressure sensor for electronic skins. Sens. Actuators A Phys. 2018, 280, 205–209. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.; Yang, Z.; Jiang, S.; Ju, Z.; Li, Y.; Wang, X.; Wang, D.; Jian, M.; Zhang, Y.; et al. Epidermis Microstructure Inspired Graphene Pressure Sensor with Random Distributed Spinosum for High Sensitivity and Large Linearity. ACS Nano 2018, 12, 2346–2354. [Google Scholar] [CrossRef] [PubMed]
- Chhetry, A.; Das, P.S.; Yoon, H.; Park, J.Y. A sandpaper-inspired flexible and stretchable resistive sensor for pressure and strain measurement. Org. Electron. 2018, 62, 581–590. [Google Scholar] [CrossRef]
- Sun, Q.; Zhao, X.; Zhou, Y.; Yeung, C.; Wu, W.; Venkatesh, S.; Xu, Z.; Wylie, J.J.; Li, W.; Roy, V.A.L. Fingertip-Skin-Inspired Highly Sensitive and Multifunctional Sensor with Hierarchically Structured Conductive Graphite/Polydimethylsiloxane Foams. Adv. Funct. Mater. 2019, 29, 1808829. [Google Scholar] [CrossRef]
- Bai, N.; Wang, L.; Wang, Q.; Deng, J.; Wang, Y.; Lu, P.; Huang, J.; Li, G.; Zhang, Y.; Yang, J.; et al. Graded intrafillable architecture-based iontronic pressure sensor with ultra-broad-range high sensitivity. Nat. Commun. 2020, 11, 209. [Google Scholar] [CrossRef]
- Jian, M.; Xia, K.; Wang, Q.; Yin, Z.; Wang, H.; Wang, C.; Xie, H.; Zhang, M.; Zhang, Y. Flexible and Highly Sensitive Pressure Sensors Based on Bionic Hierarchical Structures. Adv. Funct. Mater. 2017, 27, 1606066. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Hong, Y.; Wang, Y.; Zhang, J.; Liu, Q.; Wu, Z.; Guo, C.F. A Highly Sensitive Flexible Capacitive Tactile Sensor with Sparse and High-Aspect-Ratio Microstructures. Adv. Electron. Mater. 2018, 4, 1700586. [Google Scholar] [CrossRef]
- Xia, K.; Wang, C.; Jian, M.; Wang, Q.; Zhang, Y. CVD growth of fingerprint-like patterned 3D graphene film for an ultrasensitive pressure sensor. Nano Res. 2018, 11, 1124–1134. [Google Scholar] [CrossRef]
- Shi, J.; Wang, L.; Dai, Z.; Zhao, L.; Du, M.; Li, H.; Fang, Y. Multiscale Hierarchical Design of a Flexible Piezoresistive Pressure Sensor with High Sensitivity and Wide Linearity Range. Small 2018, 14, 1800819. [Google Scholar] [CrossRef]
- Yao, G.; Xu, L.; Cheng, X.; Li, Y.; Huang, X.; Guo, W.; Liu, S.; Wang, Z.L.; Wu, H. Bioinspired Triboelectric Nanogenerators as Self-Powered Electronic Skin for Robotic Tactile Sensing. Adv. Funct. Mater. 2020, 30, 1907312. [Google Scholar] [CrossRef]
- Mahata, C.; Algadi, H.; Lee, J.; Kim, S.; Lee, T. Biomimetic-inspired micro-nano hierarchical structures for capacitive pressure sensor applications. Measurement 2020, 151, 107095. [Google Scholar] [CrossRef]
- Jang, H.-H.; Park, J.-S.; Choi, B. Flexible piezoresistive pulse sensor using biomimetic PDMS mold replicated negatively from shark skin and PEDOT:PSS thin film. Sens. Actuators A Phys. 2019, 286, 107–114. [Google Scholar] [CrossRef]
- Wang, X.; Gu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals. Adv. Mater. 2014, 26, 1336–1342. [Google Scholar] [CrossRef] [PubMed]
- Zhong, W.; Liu, C.; Liu, Q.; Piao, L.; Jiang, H.; Wang, W.; Liu, K.; Li, M.; Sun, G.; Wang, D. Ultrasensitive Wearable Pressure Sensors Assembled by Surface-Patterned Polyolefin Elastomer Nanofiber Membrane Interpenetrated with Silver Nanowires. ACS Appl. Mater. Interfaces 2018, 10, 42706–42714. [Google Scholar] [CrossRef] [PubMed]
- Huang, K.-H.; Chang, C.-M.; Lee, F.-W.; Wang, T.-D.; Yang, Y.-J. Highly-sensitive linear tactile array for continuously monitoring blood pulse waves. Sens. Actuators A Phys. 2018, 280, 261–270. [Google Scholar] [CrossRef]
- He, J.; Xiao, P.; Lu, W.; Shi, J.; Zhang, L.; Liang, Y.; Pan, C.; Kuo, S.-W.; Chen, T. A Universal high accuracy wearable pulse monitoring system via high sensitivity and large linearity graphene pressure sensor. Nano Energy 2019, 59, 422–433. [Google Scholar] [CrossRef]
- Park, S.-J.; Kim, J.; Chu, M.; Khine, M. Flexible Piezoresistive Pressure Sensor Using Wrinkled Carbon Nanotube Thin Films for Human Physiological Signals. Adv. Mater. Technol. 2017, 3, 1700158. [Google Scholar] [CrossRef]
- Yang, C.; Li, L.; Zhao, J.; Wang, J.; Xie, J.; Cao, Y.; Xue, M.; Lu, C. Highly Sensitive Wearable Pressure Sensors Based on Three-Scale Nested Wrinkling Microstructures of Polypyrrole Films. ACS Appl. Mater. Interfaces 2018, 10, 25811. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, B.; Duan, J.; Guo, H.; Tang, J. Flexible Pressure Sensor with Ag Wrinkled Electrodes Based on PDMS Substrate. Sensors 2016, 16, 2131. [Google Scholar] [CrossRef]
- Zeng, X.; Wang, Z.; Zhang, H.; Yang, W.; Xiang, L.; Zhao, Z.; Peng, L.-M.; Hu, Y. Tunable, Ultrasensitive, and Flexible Pressure Sensors Based on Wrinkled Microstructures for Electronic Skins. ACS Appl. Mater. Interfaces 2019, 11, 21218–21226. [Google Scholar] [CrossRef]
- Segev-Bar, M.; Landman, A.; Nir-Shapira, M.; Shuster, G.; Haick, H. A Tunable Touch Sensor and Combined Sensing Platform: Toward Nanoparticle-based Electronic Skin. ACS Appl. Mater. Interfaces 2013, 5, 5531–5541. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.S.; Shin, K.-Y.; Cheong, O.J.; Kim, J.H.; Jang, J. Highly Sensitive and Multifunctional Tactile Sensor Using Free-standing ZnO/PVDF Thin Film with Graphene Electrodes for Pressure and Temperature Monitoring. Sci. Rep. 2015, 5, 7887. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Gui, X.; Liang, B.; Yang, R.; Zheng, Y.; Zhao, C.; Li, X.; Zhu, H.; Tang, Z. Structural Engineering for High Sensitivity, Ultrathin Pressure Sensors Based on Wrinkled Graphene and Anodic Aluminum Oxide Membrane. ACS Appl. Mater. Interfaces 2017, 9, 24111–24117. [Google Scholar] [CrossRef] [PubMed]
- Yin, B.; Liu, X.; Gao, H.; Fu, T.; Yao, J. Bioinspired and bristled microparticles for ultrasensitive pressure and strain sensors. Nat. Commun. 2018, 9. [Google Scholar] [CrossRef]
- Kim, H.; Lee, S.-W.; Joh, H.; Seong, M.; Lee, W.S.; Kang, M.S.; Pyo, J.B.; Oh, S.J. Chemically Designed Metallic/Insulating Hybrid Nanostructures with Silver Nanocrystals for Highly Sensitive Wearable Pressure Sensors. ACS Appl. Mater. Interfaces 2018, 10, 1389–1398. [Google Scholar] [CrossRef]
- Yao, H.B.; Ge, J.; Wang, C.F.; Wang, X.; Hu, W.; Zheng, Z.J.; Ni, Y.; Yu, S.H. A flexible and highly pressure-sensitive graphene-polyurethane sponge based on fractured microstructure design. Adv. Mater. 2013, 25, 6692–6698. [Google Scholar] [CrossRef]
- Yin, X.; Vinod, T.P.; Jelinek, R. A flexible high-sensitivity piezoresistive sensor comprising a Au nanoribbon-coated polymer sponge. J. Mater. Chem. C 2015, 3, 9247–9252. [Google Scholar] [CrossRef]
- Huang, Y.; He, X.; Gao, L.; Wang, Y.; Liu, C.; Liu, P. Pressure-sensitive carbon black/graphene nanoplatelets-silicone rubber hybrid conductive composites based on a three-dimensional polydopamine-modified polyurethane sponge. J. Mater. Sci. Mater. Electron. 2017, 28, 9495–9504. [Google Scholar] [CrossRef]
- Dong, X.; Wei, Y.; Chen, S.; Lin, Y.; Liu, L.; Li, J. A linear and large-range pressure sensor based on a graphene/silver nanowires nanobiocomposites network and a hierarchical structural sponge. Compos. Sci. Technol. 2018, 155, 108–116. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Y.; Fan, X.; Luo, N.; Zhou, S.; Chen, S.-C.; Zhao, N.; Wong, C.P. Wood Derived Composites for High Sensitivity and Wide Linear-Range Pressure Sensing. Small 2018, 14, 1801520. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, J.; Pu, J.; Guo, X.; Qiu, J.; Ma, Y.; Zhang, Y.; Yang, X. Resistive pressure sensor for high-sensitivity e-skin based on porous sponge dip-coated CB/MWCNTs/SR conductive composites. Mater. Res. Express 2018, 5, 065701. [Google Scholar] [CrossRef]
- Li, X.-P.; Li, Y.; Li, X.; Song, D.; Min, P.; Hu, C.; Zhang, H.-B.; Koratkar, N.; Yu, Z.-Z. Highly sensitive, reliable and flexible piezoresistive pressure sensors featuring polyurethane sponge coated with MXene sheets. J. Colloid Interface Sci. 2019, 542, 54–62. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Guo, X.; Chu, R.; Wang, S.; Zeng, W.; Qu, L.; Zhao, Y.; Yan, F.; Xing, G. Rapid-Response, Low Detection Limit, and High-Sensitivity Capacitive Flexible Tactile Sensor Based on Three-Dimensional Porous Dielectric Layer for Wearable Electronic Skin. ACS Appl. Mater. Interfaces 2019, 11, 40716–40725. [Google Scholar] [CrossRef] [PubMed]
- Samad, Y.A.; Li, Y.; Alhassan, S.M.; Liao, K. Novel Graphene Foam Composite with Adjustable Sensitivity for Sensor Applications. ACS Appl. Mater. Interfaces 2015, 7, 9195–9202. [Google Scholar] [CrossRef] [PubMed]
- Zhang, F.; Zang, Y.; Huang, D.; Di, C.; Zhu, D. Flexible and self-powered temperature-pressure dual-parameter sensors using microstructure-frame-supported organic thermoelectric materials. Nat. Commun. 2015, 6, 8356. [Google Scholar] [CrossRef]
- Hong, S.Y.; Oh, J.H.; Park, H.; Yun, J.Y.; Jin, S.W.; Sun, L.; Zi, G.; Ha, J.S. Polyurethane foam coated with a multi-walled carbon nanotube/polyaniline nanocomposite for a skin-like stretchable array of multi-functional sensors. NPG Asia Mater. 2017, 9, e448. [Google Scholar] [CrossRef]
- Tewari, A.; Gandla, S.; Bohm, S.; McNeill, C.R.; Gupta, D. Highly Exfoliated MWNT–rGO Ink-Wrapped Polyurethane Foam for Piezoresistive Pressure Sensor Applications. ACS Appl. Mater. Interfaces 2018, 10, 5185–5195. [Google Scholar] [CrossRef]
- Kim, S.J.; Mondal, S.; Min, B.K.; Choi, C.-G. Highly Sensitive and Flexible Strain–Pressure Sensors with Cracked Paddy-Shaped MoS 2 /Graphene Foam/Ecoflex Hybrid Nanostructures. ACS Appl. Mater. Interfaces 2018, 10, 36377–36384. [Google Scholar] [CrossRef]
- Liu, W.; Liu, N.; Yue, Y.; Rao, J.; Luo, C.; Zhang, H.; Yang, C.; Su, J.; Liu, Z.; Gao, Y. A flexible and highly sensitive pressure sensor based on elastic carbon foam. J. Mater. Chem. C 2018, 6, 1451–1459. [Google Scholar] [CrossRef]
- Zheng, S.; Wu, X.; Huang, Y.; Xu, Z.; Yang, W.; Liu, Z.; Huang, S.; Xie, B.; Yang, M. Highly sensitive and multifunctional piezoresistive sensor based on polyaniline foam for wearable Human-Activity monitoring. Compos. Part A Appl. Sci. Manuf. 2019, 121, 510–516. [Google Scholar] [CrossRef]
- Zhao, L.; Qiang, F.; Dai, S.-W.; Shen, S.-C.; Huang, Y.-Z.; Huang, N.-J.; Zhang, G.-D.; Guan, L.-Z.; Gao, J.-F.; Song, Y.; et al. Construction of Sandwich-like Porous Structure of Graphene-Coated Foam Composites for Ultrasensitive and Flexible Pressure Sensor. Nanoscale 2019, 11, 10229. [Google Scholar] [CrossRef] [PubMed]
- Tao, L.-Q.; Zhang, K.-N.; Tian, H.; Liu, Y.; Wang, D.-Y.; Chen, Y.-Q.; Yang, Y.; Ren, T.-L. Graphene-Paper Pressure Sensor for Detecting Human Motions. ACS Nano 2017, 11, 8790–8795. [Google Scholar] [CrossRef] [PubMed]
- Zhan, Z.; Lin, R.; Tran, V.-T.; An, J.; Wei, Y.; Du, H.; Tran, T.; Lu, W. Paper/Carbon Nanotube-Based Wearable Pressure Sensor for Physiological Signal Acquisition and Soft Robotic Skin. ACS Appl. Mater. Interfaces 2017, 9, 37921–37928. [Google Scholar] [CrossRef] [PubMed]
- Tsai, Y.-J.; Wang, C.-M.; Chang, T.-S.; Sutradhar, S.; Chang, C.-W.; Chen, C.-Y.; Hsieh, C.-H.; Liao, W.-S. Multilayered Ag NP–PEDOT–Paper Composite Device for Human–Machine Interfacing. ACS Appl. Mater. Interfaces 2019, 11, 10380–10388. [Google Scholar] [CrossRef]
- Guo, Y.; Zhong, M.; Fang, Z.; Wan, P.; Yu, G. A Wearable Transient Pressure Sensor Made with MXene Nanosheets for Sensitive Broad-Range Human–Machine Interfacing. Nano Lett. 2019, 19, 1143–1150. [Google Scholar] [CrossRef]
- Gao, L.; Zhu, C.; Li, L.; Zhang, C.; Liu, J.; Yu, H.-D.; Huang, W. All Paper-Based Flexible and Wearable Piezoresistive Pressure Sensor. ACS Appl. Mater. Interfaces 2019, 11, 25034–25042. [Google Scholar] [CrossRef]
- Song, Y.; Huang, W.; Mu, C.; Chen, X.; Zhang, Q.; Ran, A.; Peng, Z.; Sun, R.; Xie, W. Carbon Nanotube-Modified Fabric for Wearable Smart Electronic-skin with Exclusive Normal-Tangential Force Sensing Ability. Adv. Mater. Technol. 2019, 4, 1800680. [Google Scholar] [CrossRef]
- Zou, B.; Chen, Y.; Liu, Y.; Xie, R.; Du, Q.; Zhang, T.; Shen, Y.; Zheng, B.; Li, S.; Wu, J.; et al. Repurposed Leather with Sensing Capabilities for Multifunctional Electronic Skin. Adv. Sci. 2019, 6, 1801283. [Google Scholar] [CrossRef]
- Kim, K.; Jung, M.; Jeon, S.; Bae, J. Robust and scalable three-dimensional spacer textile pressure sensor for human motion detection. Smart Mater. Struct. 2019, 28, 065019. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Lai, X.; Gao, T.; Liao, X.; Chen, W.; Zeng, X. Carbonized cotton fabric-based multilayer piezoresistive pressure sensors. Cellulose 2019, 26, 5001–5014. [Google Scholar] [CrossRef]
- Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef] [PubMed]
- Wei, Y.; Chen, S.; Lin, Y.; Yuan, X.; Liu, L. Silver nanowires coated on cotton for flexible pressure sensors. J. Mater. Chem. C 2016, 4, 935. [Google Scholar] [CrossRef]
- Liu, Y.; Tao, L.-Q.; Wang, D.-Y.; Zhang, T.-Y.; Yang, Y.; Ren, T.-L. Flexible, highly sensitive pressure sensor with a wide range based on graphene-silk network structure. Appl. Phys. Lett. 2017, 110, 123508. [Google Scholar] [CrossRef]
- Liu, M.; Pu, X.; Jiang, C.; Liu, T.; Huang, X.; Chen, L.; Du, C.; Sun, J.; Hu, W.; Wang, Z.L. Large-Area All-Textile Pressure Sensors for Monitoring Human Motion and Physiological Signals. Adv. Mater. 2017, 29, 1703700. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, S.; Dong, X.; Lin, Y.; Liu, L. Flexible piezoresistive sensors based on “dynamic bridging effect” of silver nanowires toward graphene. Carbon N. Y. 2017, 113, 395. [Google Scholar] [CrossRef]
- Chen, S.; Liu, S.; Wang, P.; Liu, H.; Liu, L. Highly stretchable fiber-shaped e-textiles for strain/pressure sensing, full-range human motions detection, health monitoring, and 2D force mapping. J. Mater. Sci. 2018, 53, 2995–3005. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Lai, X.; Gao, T.; Yang, J.; Zeng, X. Thiolated Graphene@Polyester Fabric-Based Multilayer Piezoresistive Pressure Sensors for Detecting Human Motion. ACS Appl. Mater. Interfaces 2018, 10, 41784–41792. [Google Scholar] [CrossRef]
- Qiu, L.; Bulut Coskun, M.; Tang, Y.; Liu, J.Z.; Alan, T.; Ding, J.; Truong, V.T.; Li, D. Ultrafast Dynamic Piezoresistive Response of Graphene-Based Cellular Elastomers. Adv. Mater. 2016, 28, 194–200. [Google Scholar] [CrossRef]
- Wan, S.; Bi, H.; Zhou, Y.; Xie, X.; Su, S.; Yin, K.; Sun, L. Graphene oxide as high-performance dielectric materials for capacitive pressure sensors. Carbon N. Y. 2017, 114, 209–216. [Google Scholar] [CrossRef]
- Lv, L.; Zhang, P.; Xu, T.; Qu, L. Ultrasensitive Pressure Sensor Based on an Ultralight Sparkling Graphene Block. ACS Appl. Mater. Interfaces 2017, 9, 22885–22892. [Google Scholar] [CrossRef]
- Peng, X.; Wu, K.; Hu, Y.; Zhuo, H.; Chen, Z.; Jing, S.; Liu, Q.; Liu, C.; Zhong, L. A mechanically strong and sensitive CNT/rGO–CNF carbon aerogel for piezoresistive sensors. J. Mater. Chem. A 2018, 6, 23550–23559. [Google Scholar] [CrossRef]
- Ma, Y.; Yue, Y.; Zhang, H.; Cheng, F.; Zhao, W.; Rao, J.; Luo, S.; Wang, J.; Jiang, X.; Liu, Z.; et al. 3D Synergistical MXene/Reduced Graphene Oxide Aerogel for a Piezoresistive Sensor. ACS Nano 2018, 12, 3209–3216. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Zhuo, H.; Chen, Z.; Wu, K.; Luo, Q.; Liu, Q.; Jing, S.; Liu, C.; Zhong, L.; Sun, R.; et al. Superelastic Carbon Aerogel with Ultrahigh and Wide-Range Linear Sensitivity. ACS Appl. Mater. Interfaces 2018, 10, 40641–40650. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Li, H.; Lai, X.; Chen, Z.; Zeng, X. Conductive and superhydrophobic F-rGO@CNTs/chitosan aerogel for piezoresistive pressure sensor. Chem. Eng. J. 2020, 386, 123998. [Google Scholar] [CrossRef]
- Yoon, J.I.; Choi, K.S.; Chang, S.P. A novel means of fabricating microporous structures for the dielectric layers of capacitive pressure sensor. Microelectron. Eng. 2017, 179, 60–66. [Google Scholar] [CrossRef]
- Song, Y.; Chen, H.; Su, Z.; Chen, X.; Miao, L.; Zhang, J.; Cheng, X.; Zhang, H. Highly Compressible Integrated Supercapacitor-Piezoresistance-Sensor System with CNT-PDMS Sponge for Health Monitoring. Small 2017, 13, 1702091. [Google Scholar] [CrossRef]
- Atalay, O.; Atalay, A.; Gafford, J.; Walsh, C. A Highly Sensitive Capacitive-Based Soft Pressure Sensor Based on a Conductive Fabric and a Microporous Dielectric Layer. Adv. Mater. Technol. 2018, 3, 1700237. [Google Scholar] [CrossRef]
- Wang, J.; Suzuki, R.; Shao, M.; Gillot, F.; Shiratori, S. Capacitive Pressure Sensor with Wide-Range, Bendable, and High Sensitivity Based on the Bionic Komochi Konbu Structure and Cu/Ni Nanofiber Network. ACS Appl. Mater. Interfaces 2019, 11, 11928–11935. [Google Scholar] [CrossRef]
- Mu, C.; Li, J.; Song, Y.; Huang, W.; Ran, A.; Deng, K.; Huang, J.; Xie, W.; Sun, R.; Zhang, H. Enhanced Piezocapacitive Effect in CaCu 3 Ti 4 O 12 –Polydimethylsiloxane Composited Sponge for Ultrasensitive Flexible Capacitive Sensor. ACS Appl. Nano Mater. 2018, 1, 274–283. [Google Scholar] [CrossRef]
- Wen, Z.; Yang, J.; Ding, H.; Zhang, W.; Wu, D.; Xu, J.; Shi, Z.; Xu, T.; Tian, Y.; Li, X. Ultra-highly sensitive, low hysteretic and flexible pressure sensor based on porous MWCNTs/Ecoflex elastomer composites. J. Mater. Sci. Mater. Electron. 2018, 29, 20978–20983. [Google Scholar] [CrossRef]
- Wei, P.; Guo, X.; Qiu, X.; Yu, D. Flexible capacitive pressure sensor with sensitivity and linear measuring range enhanced based on porous composite of carbon conductive paste and polydimethylsiloxane. Nanotechnology 2019, 30, 455501. [Google Scholar] [CrossRef] [PubMed]
- Miller, S.; Bao, Z. Fabrication of flexible pressure sensors with microstructured polydimethylsiloxane dielectrics using the breath figures method. J. Mater. Res. 2015, 30, 3584–3594. [Google Scholar] [CrossRef]
- Lou, Z.; Chen, S.; Wang, L.; Shi, R.; Li, L.; Jiang, K.; Chen, D.; Shen, G. Ultrasensitive and ultraflexible e-skins with dual functionalities for wearable electronics. Nano Energy 2017, 38, 28–35. [Google Scholar] [CrossRef]
- Zhang, Y.; Hu, Y.; Zhu, P.; Han, F.; Zhu, Y.; Sun, R.; Wong, C.-P. Flexible and Highly Sensitive Pressure Sensor Based on Microdome-Patterned PDMS Forming with Assistance of Colloid Self-Assembly and Replica Technique for Wearable Electronics. ACS Appl. Mater. Interfaces 2017, 9, 35968–35976. [Google Scholar] [CrossRef] [PubMed]
- Zhuo, B.; Chen, S.; Zhao, M.; Guo, X. High Sensitivity Flexible Capacitive Pressure Sensor Using Polydimethylsiloxane Elastomer Dielectric Layer Micro-Structured by 3-D Printed Mold. IEEE J. Electron Devices Soc. 2017, 5, 219–223. [Google Scholar] [CrossRef]
- Chen, H.; Song, Y.; Guo, H.; Miao, L.; Chen, X.; Su, Z.; Zhang, H. Hybrid porous micro structured finger skin inspired self-powered electronic skin system for pressure sensing and sliding detection. Nano Energy 2018, 51, 496–503. [Google Scholar] [CrossRef]
- Peng, S.; Blanloeuil, P.; Wu, S.; Wang, C.H. Rational Design of Ultrasensitive Pressure Sensors by Tailoring Microscopic Features. Adv. Mater. Interfaces 2018, 5, 1800403. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, Z.; Zhou, H.; Guo, X.; Zhang, Y.; Wang, Y.; Liu, P.; Liu, C.; Ma, Y.; Zhang, Y. Highly sensitive pressure sensor based on structurally modified tissue paper for human physiological activity monitoring. J. Appl. Polym. Sci. 2020, 48973, 48973. [Google Scholar] [CrossRef]
- Yeo, S.Y.; Park, S.; Yi, Y.J.; Kim, D.H.; Lim, J.A. Highly Sensitive Flexible Pressure Sensors Based on Printed Organic Transistors with Centro-Apically Self-Organized Organic Semiconductor Microstructures. ACS Appl. Mater. Interfaces 2017, 9, 42996–43003. [Google Scholar] [CrossRef]
- Yin, X.-Y.; Zhang, Y.; Cai, X.; Guo, Q.; Yang, J.; Wang, Z.L. 3D printing of ionic conductors for high-sensitivity wearable sensors. Mater. Horizons 2019, 6, 767–780. [Google Scholar] [CrossRef]
- Dos Santos, A.; Pinela, N.; Alves, P.; Santos, R.; Farinha, R.; Fortunato, E.; Martins, R.; Águas, H.; Igreja, R. E-Skin Bimodal Sensors for Robotics and Prosthesis Using PDMS Molds Engraved by Laser. Sensors 2019, 19, 899. [Google Scholar] [CrossRef] [PubMed]
- Pinela, N.M.G. Piezoresistive pressure sensor for application in e-skin devices, Universidade Nova de Lisboa. 2017. [Google Scholar]
- dos Santos, A.; Pinela, N.; Alves, P.; Santos, R.; Fortunato, E.; Martins, R.; Águas, H.; Igreja, R.; dos Santos, A.; Pinela, N.; et al. E-Skin Pressure Sensors Made by Laser Engraved PDMS Molds. Proceedings 2018, 2, 1039. [Google Scholar] [CrossRef]
- Gao, Y.; Lu, C.; Guohui, Y.; Sha, J.; Tan, J.; Xuan, F. Laser micro-structured pressure sensor with modulated sensitivity for electronic skins. Nanotechnology 2019, 30, 325502. [Google Scholar] [CrossRef] [PubMed]
- Palaniappan, V.; Masihi, S.; Panahi, M.; Maddipatla, D.; Bose, A.K.; Zhang, X.; Narakathu, B.B.; Bazuin, B.J.; Atashbar, M.Z. Laser-Assisted Fabrication of Flexible Micro-Structured Pressure Sensor for Low Pressure Applications. In Proceedings of the 2019 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Glasgow, UK, 7–10 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–3. [Google Scholar]
- Ji, B.; Mao, Y.; Zhou, Q.; Zhou, J.; Chen, G.; Gao, Y.; Tian, Y.; Wen, W.; Zhou, B. Facile Preparation of Hybrid Structure Based on Mesodome and Micropillar Arrays as Flexible Electronic Skin with Tunable Sensitivity and Detection Range. ACS Appl. Mater. Interfaces 2019, 11, 28060–28071. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, B.; Li, K.; Zhang, T.; Yang, X. A wide linearity range and high sensitivity flexible pressure sensor with hierarchical microstructures via laser marking. J. Mater. Chem. C 2020, 8, 3088–3096. [Google Scholar] [CrossRef]
- Pickering, T.G.; Hall, J.E.; Appel, L.J.; Falkner, B.E.; Graves, J.; Hill, M.N.; Jones, D.W.; Kurtz, T.; Sheps, S.G.; Roccella, E.J. Recommendations for Blood Pressure Measurement in Humans and Experimental Animals: Part 1: Blood Pressure Measurement in Humans: A Statement for Professionals From the Subcommittee of Professional and Public Education of the American Heart Association Cou. Circulation 2005, 111, 697–716. [Google Scholar] [CrossRef]
- Forouzanfar, M.H.; Liu, P.; Roth, G.A.; Ng, M.; Biryukov, S.; Marczak, L.; Alexander, L.; Estep, K.; Abate, K.H.; Akinyemiju, T.F.; et al. Global Burden of Hypertension and Systolic Blood Pressure of at Least 110 to 115 mm Hg, 1990-2015. JAMA 2017, 317, 165–182. [Google Scholar] [CrossRef]
- Lim, S.S.; Vos, T.; Flaxman, A.D.; Danaei, G.; Shibuya, K.; Adair-Rohani, H.; Amann, M.; Anderson, H.R.; Andrews, K.G.; Aryee, M.; et al. A comparative risk assessment of burden of disease and injury attributable to 67 risk factors and risk factor clusters in 21 regions, 1990-2010: A systematic analysis for the Global Burden of Disease Study 2010. Lancet 2012, 380, 2224–2260. [Google Scholar] [CrossRef]
- Kearney, P.M.; Whelton, M.; Reynolds, K.; Muntner, P.; Whelton, P.K.; He, J. Global burden of hypertension: Analysis of worldwide data. Lancet 2005, 365, 217–223. [Google Scholar] [CrossRef]
- O’Brien, E.; Fitzgerald, D. The history of blood pressure measurement. J. Hum. Hypertens. 1994, 8, 73–84. [Google Scholar] [PubMed]
- Geddes, L.A. Handbook of Blood Pressure Measuremen, 1st ed.; Springer: Berlin, Germany, 1991; ISBN 9781468471724. [Google Scholar]
- Papaioannou, T.G.; Protogerou, A.D.; Stamatelopoulos, K.S.; Vavuranakis, M.; Stefanadis, C. Non-Invasive Methods and Techniques for Central Blood Pressure Estimation: Procedures, Validation, Reproducibility and Limitations. Curr. Pharm. Des. 2009, 15, 245–253. [Google Scholar] [CrossRef] [PubMed]
- Avolio, A.P.; Butlin, M.; Walsh, A. Arterial blood pressure measurement and pulse wave analysis-–their role in enhancing cardiovascular assessment. Physiol. Meas. 2010, 31, R1–R47. [Google Scholar] [CrossRef] [PubMed]
- Loh, K.J.; Azhari, F. Recent Advances in Skin-Inspired Sensors Enabled by Nanotechnology. JOM 2012, 64, 793–801. [Google Scholar] [CrossRef]
- Choi, S.; Lee, H.; Ghaffari, R.; Hyeon, T.; Kim, D.-H. Recent Advances in Flexible and Stretchable Bio-Electronic Devices Integrated with Nanomaterials. Adv. Mater. 2016, 28, 4203–4218. [Google Scholar] [CrossRef]
- Nichols, W.W. Clinical measurement of arterial stiffness obtained from noninvasive pressure waveforms. Am. J. Hypertens. 2005, 18, 3–10. [Google Scholar] [CrossRef]
- Meng, K.; Chen, J.; Li, X.; Wu, Y.; Fan, W.; Zhou, Z.; He, Q.; Wang, X.; Fan, X.; Zhang, Y.; et al. Flexible Weaving Constructed Self-Powered Pressure Sensor Enabling Continuous Diagnosis of Cardiovascular Disease and Measurement of Cuffless Blood Pressure. Adv. Funct. Mater. 2018, 29, 1806388. [Google Scholar] [CrossRef]
- Palatini, P.; Julius, S. Heart rate and the cardiovascular risk. J. Hypertens. 1997, 15, 3–17. [Google Scholar] [CrossRef]
- Fleming, S.; Thompson, M.; Stevens, R.; Heneghan, C.; Plüddemann, A.; Maconochie, I.; Tarassenko, L.; Mant, D. Normal ranges of heart rate and respiratory rate in children from birth to 18 years of age: A systematic review of observational studies. Lancet 2011, 377, 1011–1018. [Google Scholar] [CrossRef]
- Gandevia, S.C.; McKenzie, D.K. Respiratory rate: The neglected vital sign. Med. J. Aust. 2008, 189, 531–532. [Google Scholar] [CrossRef]
- Cai, F.; Yi, C.; Liu, S.; Wang, Y.; Liu, L.; Liu, X.; Xu, X.; Wang, L. Ultrasensitive, passive and wearable sensors for monitoring human muscle motion and physiological signals. Biosens. Bioelectron. 2016, 77, 907–913. [Google Scholar] [CrossRef] [PubMed]
- Nie, P.; Wang, R.; Xu, X.; Cheng, Y.; Wang, X.; Shi, L.; Sun, J. High-Performance Piezoresistive Electronic Skin with Bionic Hierarchical Microstructure and Microcracks. ACS Appl. Mater. Interfaces 2017, 9, 14911–14919. [Google Scholar] [CrossRef] [PubMed]
- Lai, Y.-C.; Ye, B.-W.; Lu, C.-F.; Chen, C.-T.; Jao, M.-H.; Su, W.-F.; Hung, W.-Y.; Lin, T.-Y.; Chen, Y.-F. Extraordinarily Sensitive and Low-Voltage Operational Cloth-Based Electronic Skin for Wearable Sensing and Multifunctional Integration Uses: A Tactile-Induced Insulating-to-Conducting Transition. Adv. Funct. Mater. 2016, 26, 1286. [Google Scholar] [CrossRef]
- Sultana, A.; Ghosh, S.K.; Sencadas, V.; Zheng, T.; Higgins, M.J.; Middya, T.R.; Mandal, D. Human skin interactive self-powered wearable piezoelectric bio-e-skin by electrospun poly-L-lactic acid nanofibers for non-invasive physiological signal monitoring. J. Mater. Chem. B 2017, 5, 7352–7359. [Google Scholar] [CrossRef] [PubMed]
- Hua, Q.; Sun, J.; Liu, H.; Bao, R.; Yu, R.; Zhai, J.; Pan, C.; Wang, Z.L. Skin-inspired highly stretchable and conformable matrix networks for multifunctional sensing. Nat. Commun. 2018, 9. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Shu, Y.; Wang, X.-F.; Mohammad, M.A.; Bie, Z.; Xie, Q.-Y.; Li, C.; Mi, W.-T.; Yang, Y.; Ren, T.-L. A Graphene-Based Resistive Pressure Sensor with Record-High Sensitivity in a Wide Pressure Range. Sci. Rep. 2015, 5, 8603. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Hoang, P.T.; Liu, T. Direct laser writing for creating porous graphitic structures and their use for flexible and highly sensitive sensor and sensor arrays. Carbon N. Y. 2016, 96, 522–531. [Google Scholar] [CrossRef]
- Zang, Y.; Zhang, F.; Huang, D.; Gao, X.; Di, C.; Zhu, D. Flexible suspended gate organic thin-film transistors for ultra-sensitive pressure detection. Nat. Commun. 2015, 6, 6269–6278. [Google Scholar] [CrossRef]
- Wan, Y.; Qiu, Z.; Huang, J.; Yang, J.; Wang, Q.; Lu, P.; Yang, J.; Zhang, J.; Huang, S.; Wu, Z.; et al. Natural Plant Materials as Dielectric Layer for Highly Sensitive Flexible Electronic Skin. Small 2018, 14, 1801657. [Google Scholar] [CrossRef]
- Li, M.; Liang, J.; Wang, X.; Zhang, M. Ultra-Sensitive Flexible Pressure Sensor Based on Microstructured Electrode. Sensors 2020, 20, 371. [Google Scholar] [CrossRef]
- Ghosh, S.K.; Adhikary, P.; Jana, S.; Biswas, A.; Sencadas, V.; Gupta, S.D.; Tudu, B.; Mandal, D. Electrospun gelatin nanofiber based self-powered bio-e-skin for health care monitoring. Nano Energy 2017, 36, 166–175. [Google Scholar] [CrossRef]
- Shu, Y.; Tian, H.; Yang, Y.; Li, C.; Cui, Y.; Mi, W.; Li, Y.; Wang, Z.; Deng, N.; Peng, B.; et al. Surface-modified piezoresistive nanocomposite flexible pressure sensors with high sensitivity and wide linearity. Nanoscale 2015, 7, 8636–8644. [Google Scholar] [CrossRef] [PubMed]
- Luo, N.; Zhang, J.; Ding, X.; Zhou, Z.; Zhang, Q.; Zhang, Y.; Chen, S.; Hu, J.; Zhao, N. Textile-Enabled Highly Reproducible Flexible Pressure Sensors for Cardiovascular Monitoring. Adv. Mater. Technol. 2018, 3, 1700222. [Google Scholar] [CrossRef]
- Wang, B.; Shi, T.; Zhang, Y.; Chen, C.; Li, Q.; Fan, Y. Lignin-based highly sensitive flexible pressure sensor for wearable electronics. J. Mater. Chem. C 2018, 6, 6423–6428. [Google Scholar] [CrossRef]
- Meng, Y.; Li, H.; Wu, K.; Zhang, S.; Li, L. High-Performance Pressure Sensor for Monitoring Mechanical Vibration and Air Pressure. Polymers (Basel) 2018, 10, 587. [Google Scholar] [CrossRef]
- Liu, W.; Liu, N.; Yue, Y.; Rao, J.; Cheng, F.; Su, J.; Liu, Z.; Gao, Y. Piezoresistive Pressure Sensor Based on Synergistical Innerconnect Polyvinyl Alcohol Nanowires/Wrinkled Graphene Film. Small 2018, 14, 1704149. [Google Scholar] [CrossRef]
- Li, H.; Wu, K.; Xu, Z.; Wang, Z.; Meng, Y.; Li, L. Ultrahigh-Sensitivity Piezoresistive Pressure Sensors for Detection of Tiny Pressure. ACS Appl. Mater. Interfaces 2018, 10, 20826–20834. [Google Scholar] [CrossRef]
- Zhu, Y.; Cai, H.; Ding, H.; Pan, N.; Wang, X. Fabrication of Low-Cost and Highly Sensitive Graphene-Based Pressure Sensor by Direct Laser Scribing Polydimethylsiloxane. ACS Appl. Mater. Interfaces 2019, 11, 6195. [Google Scholar] [CrossRef]
- Li, W.; He, K.; Zhang, D.; Li, N.; Hou, Y.; Cheng, G.; Li, W.; Sui, F.; Dai, Y.; Luo, H.; et al. Flexible and High Performance Piezoresistive Pressure Sensors Based on Hierarchical Flower-Shaped SnSe 2 Nanoplates. ACS Appl. Energy Mater. 2019, 2, 2803–2809. [Google Scholar] [CrossRef]
- Mao, Y.; Ji, B.; Chen, G.; Hao, C.; Zhou, B.; Tian, Y. Robust and Wearable Pressure Sensor Assembled from AgNW-Coated PDMS Micropillar Sheets with High Sensitivity and Wide Detection Range. ACS Appl. Nano Mater. 2019, 2, 3196–3205. [Google Scholar] [CrossRef]
- Khan, U.; Kim, T.-H.; Ryu, H.; Seung, W.; Kim, S.-W. Graphene Tribotronics for Electronic Skin and Touch Screen Applications. Adv. Mater. 2017, 29, 1603544. [Google Scholar] [CrossRef] [PubMed]
- Ma, M.; Zhang, Z.; Liao, Q.; Yi, F.; Han, L.; Zhang, G.; Liu, S.; Liao, X.; Zhang, Y. Self-powered artificial electronic skin for high-resolution pressure sensing. Nano Energy 2017, 32, 389–396. [Google Scholar] [CrossRef]
- Pu, X.; Liu, M.; Chen, X.; Sun, J.; Du, C.; Zhang, Y.; Zhai, J.; Hu, W.; Wang, Z.L. Ultrastretchable, transparent triboelectric nanogenerator as electronic skin for biomechanical energy harvesting and tactile sensing. Sci. Adv. 2017, 3, e1700015. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Wu, N.; Ma, L.; Lin, S.; Yuan, F.; Xu, Z.; Li, W.; Wang, B.; Zhou, J. Noncontact Heartbeat and Respiration Monitoring Based on a Hollow Microstructured Self-Powered Pressure Sensor. ACS Appl. Mater. Interfaces 2018, 10, 3660–3667. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Hou, X.; He, J.; Cui, M.; Wang, C.; Geng, W.; Mu, J.; Han, B.; Chou, X. Ultra-flexible and high-sensitive triboelectric nanogenerator as electronic skin for self-powered human physiological signal monitoring. Nano Energy 2020, 69, 104437. [Google Scholar] [CrossRef]



















| Material | BaTiO3 | PVDF | P(VDF-TrFE) | PZT | ZnO |
|---|---|---|---|---|---|
| d33 (pC N−1) | 31.1 * [110] | 13–28 [111] | 24–38 [111] | 593 [112]; 67 * [91] | 7.5 * [113] |
| Transduction Mechanism | Advantages | Disadvantages |
| Capacitance | Simple governing equation Simple design and analysis | Power supply required (yet no static power consumption) Limited miniaturization Prone to hysteresis and high response times More complex readout electronics |
| Piezoelectricity | Self-powered Fast response time High sensitivity | Unable to detect static pressure Prone to noise from vibrations or high frequency stimuli Drift in sensor’s response over time Temperature interference Their signal conditioning circuits require power supply |
| Piezoresistivity | Simple structure Simple readout mechanism | Power supply required (with static power consumption) Requires micro-structuring for performance improvement |
| Triboelectricity | Self-powered | Unable to detect static pressure Output affected by frequency of stimulus |
| Approach | Photolithography | Unconventional Molds | Laser Engraving |
| Precision | High | Dependent on the mound | Medium |
| Design’s Tailoring | Possible | Not possible/Highly limited | Possible |
| Complexity | Medium/High | Low | Low |
| Time involved | High | Low | Low |
| Costs | High | Low | Low |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
dos Santos, A.; Fortunato, E.; Martins, R.; Águas, H.; Igreja, R. Transduction Mechanisms, Micro-Structuring Techniques, and Applications of Electronic Skin Pressure Sensors: A Review of Recent Advances. Sensors 2020, 20, 4407. https://doi.org/10.3390/s20164407
dos Santos A, Fortunato E, Martins R, Águas H, Igreja R. Transduction Mechanisms, Micro-Structuring Techniques, and Applications of Electronic Skin Pressure Sensors: A Review of Recent Advances. Sensors. 2020; 20(16):4407. https://doi.org/10.3390/s20164407
Chicago/Turabian Styledos Santos, Andreia, Elvira Fortunato, Rodrigo Martins, Hugo Águas, and Rui Igreja. 2020. "Transduction Mechanisms, Micro-Structuring Techniques, and Applications of Electronic Skin Pressure Sensors: A Review of Recent Advances" Sensors 20, no. 16: 4407. https://doi.org/10.3390/s20164407
APA Styledos Santos, A., Fortunato, E., Martins, R., Águas, H., & Igreja, R. (2020). Transduction Mechanisms, Micro-Structuring Techniques, and Applications of Electronic Skin Pressure Sensors: A Review of Recent Advances. Sensors, 20(16), 4407. https://doi.org/10.3390/s20164407