Closed-Loop Elastic Demand Control under Dynamic Pricing Program in Smart Microgrid Using Super Twisting Sliding Mode Controller



 ,
,  ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
2. Related Work
3. Existing Work and Proposed System Model
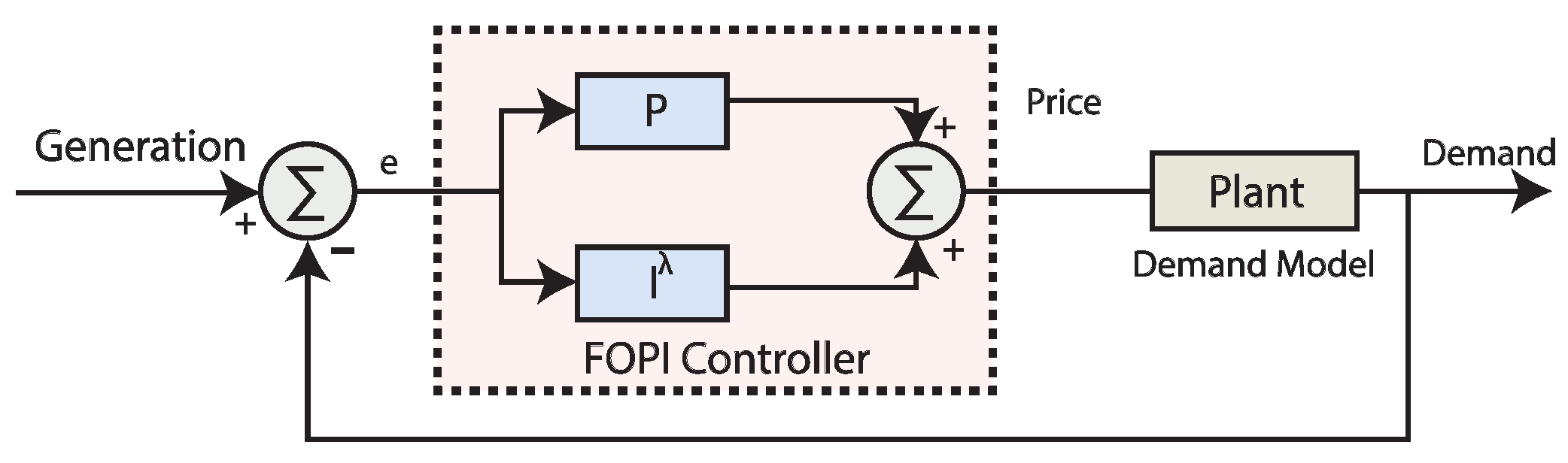
3.1. Overview of Fractional Order Proportional Integral (FOPI) Controller
3.2. Overview of Proportional Integral Derivative (PID) Controller
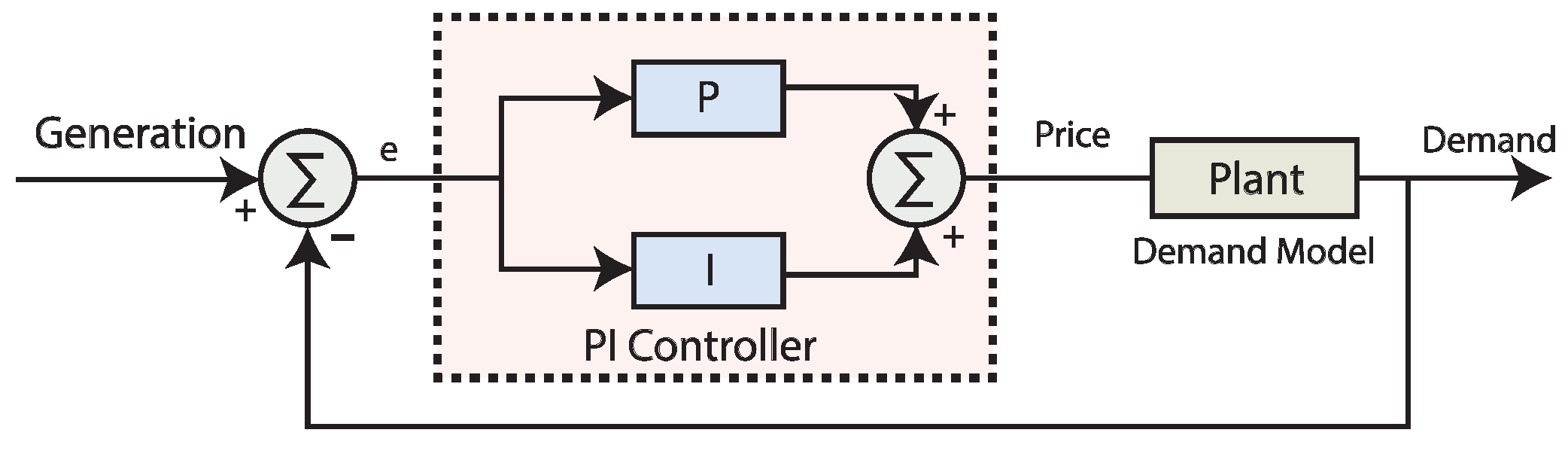
3.3. Overview of Proportional Integral (PI) Controller
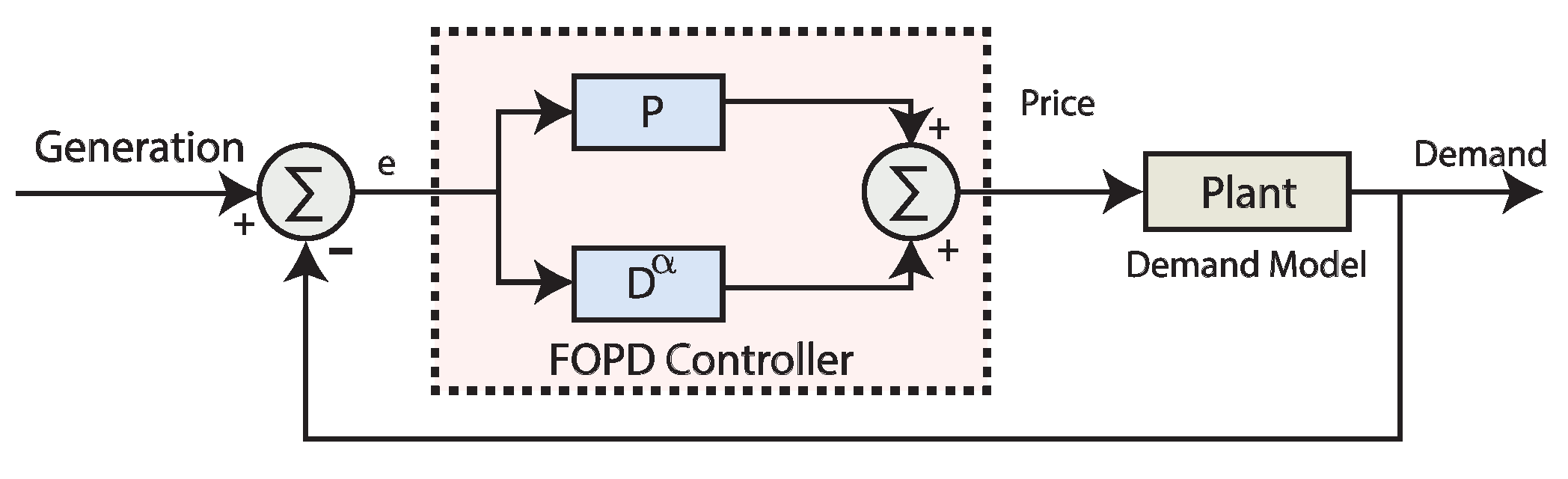
3.4. Overview of Fractional Order Proportional Derivative (FOPD) Controller
3.5. Super Twisting Sliding Mode Controller Proposed for Closed-Loop Elastic Demand Control
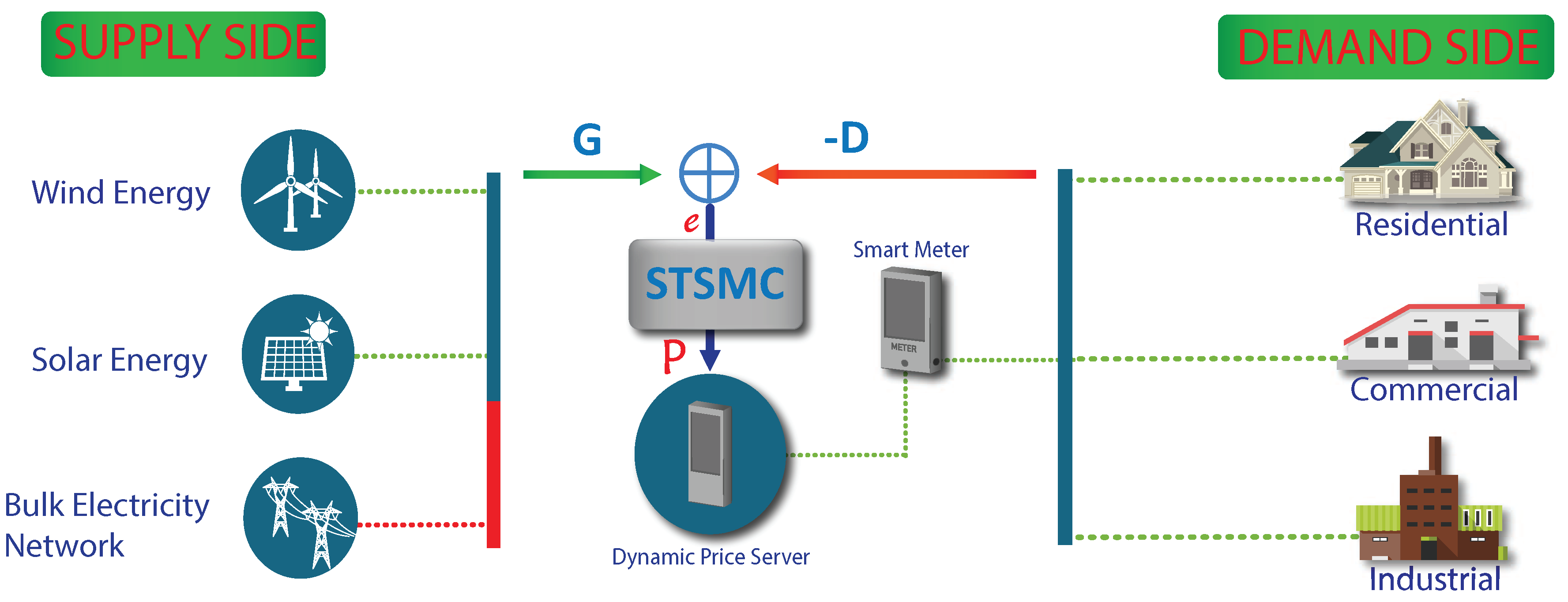
4. Proposed System Model
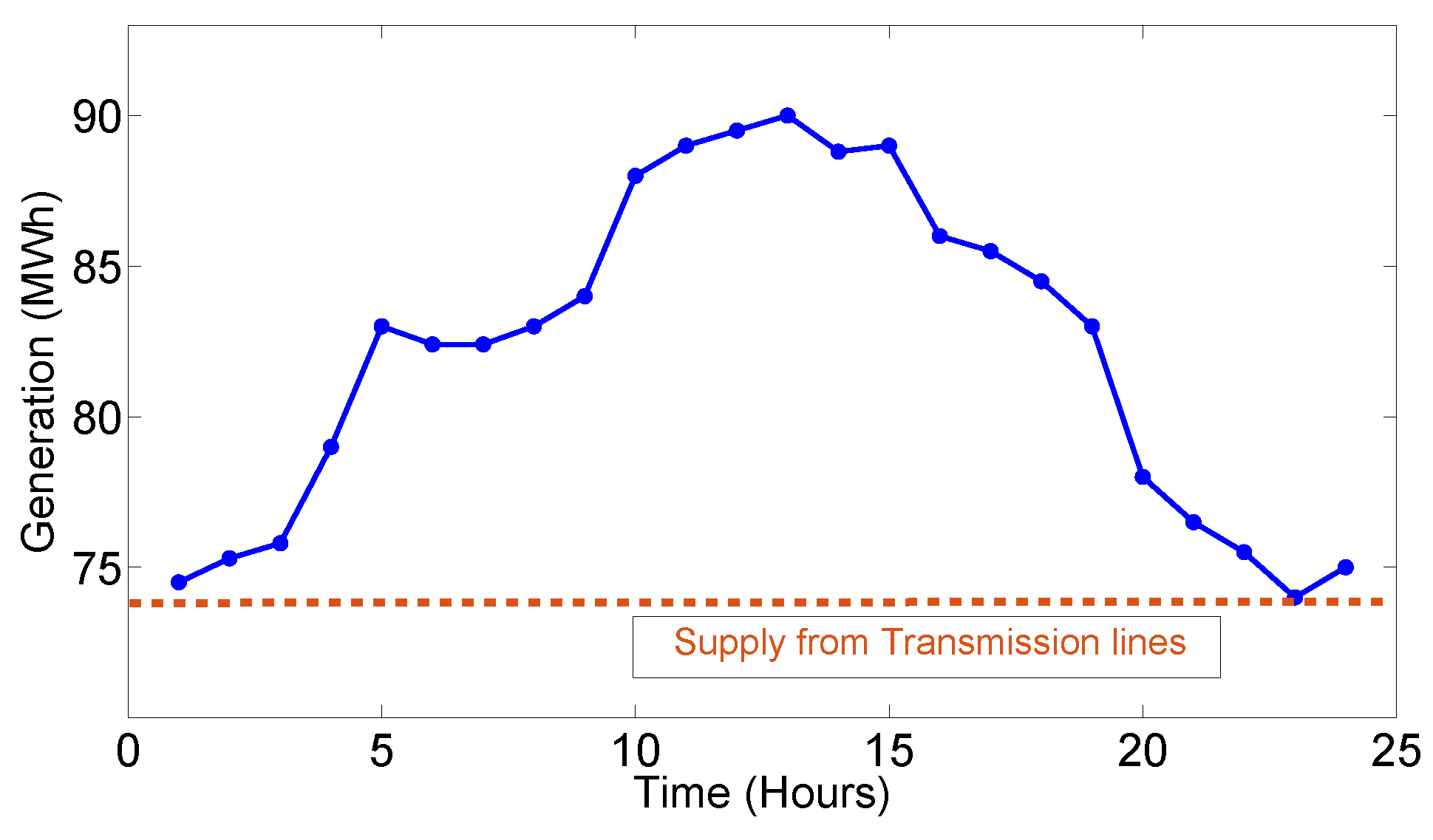
- A power system that consists of generation, transmission lines and distribution system.
- A communication system between the supply side and the demand side. This communication is done through power lines, modems, routers, wireless technologies, etc.
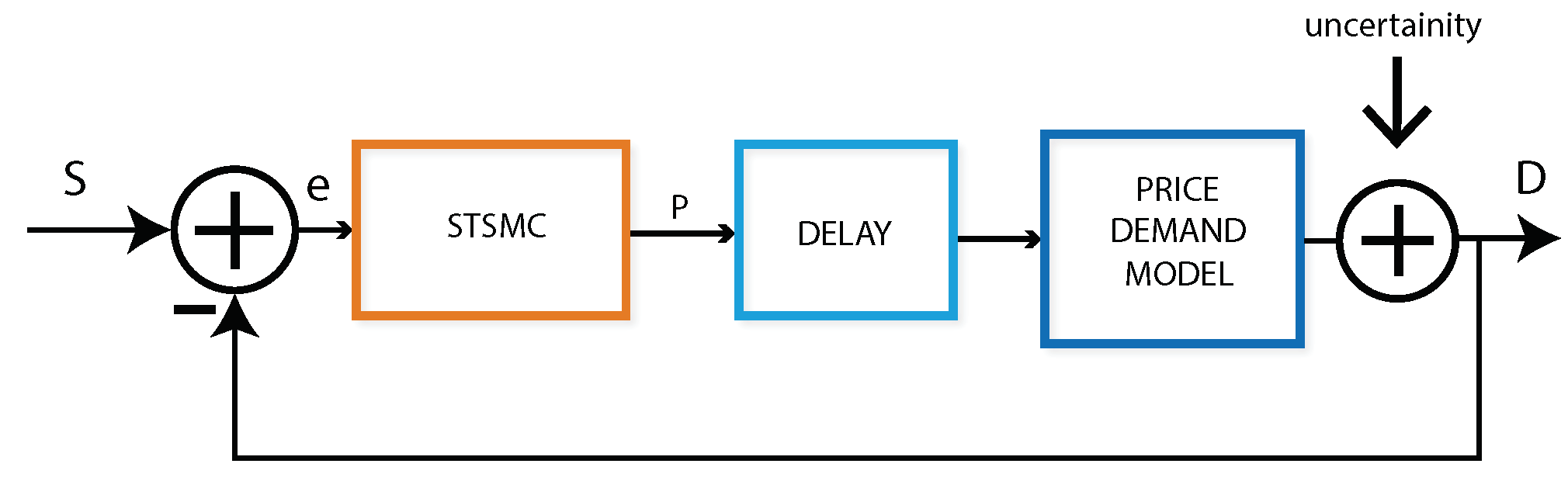
- An STSMC which originates a price signal based on the mismatch between the instant demand and generation.
- 1.
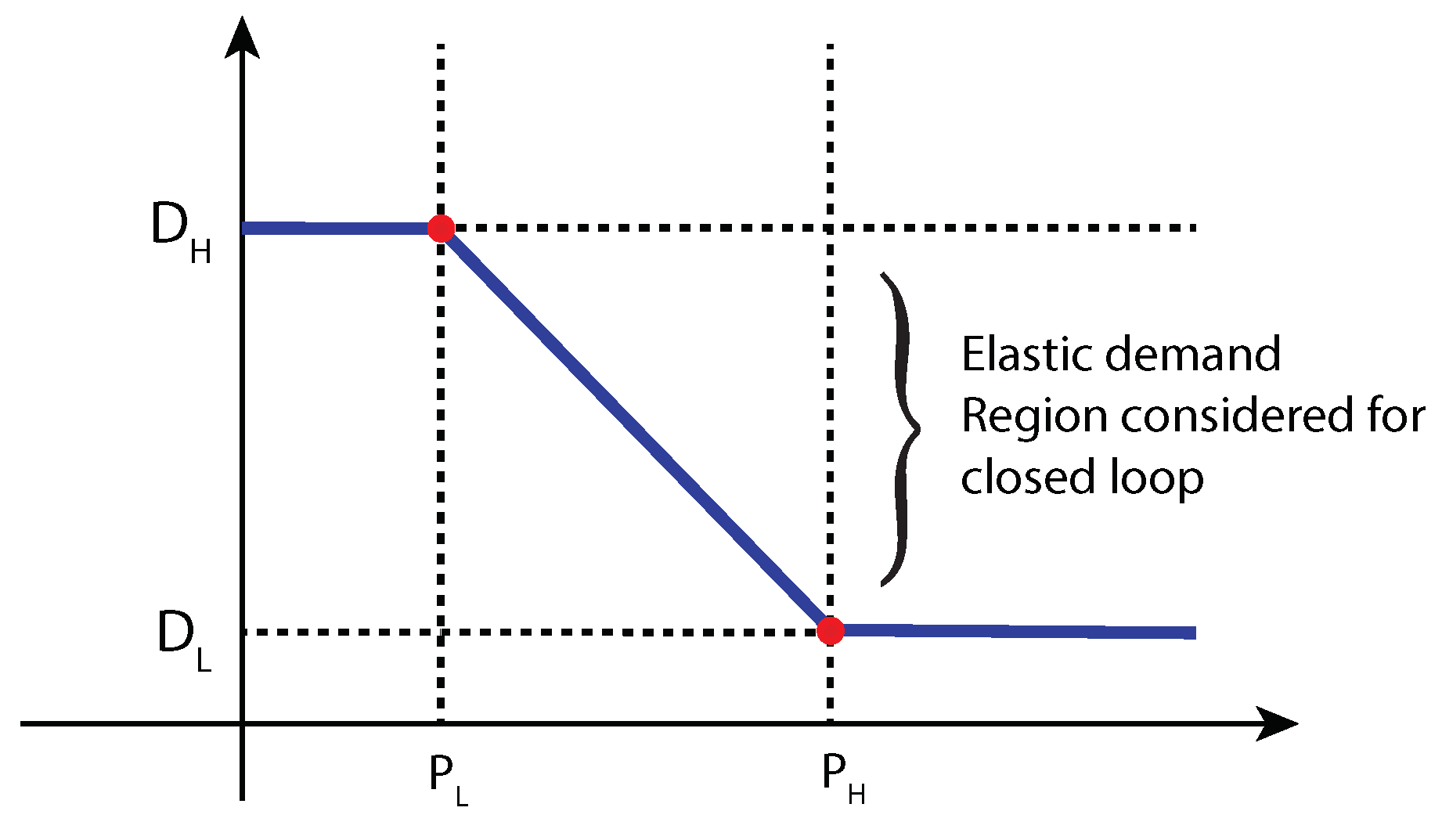
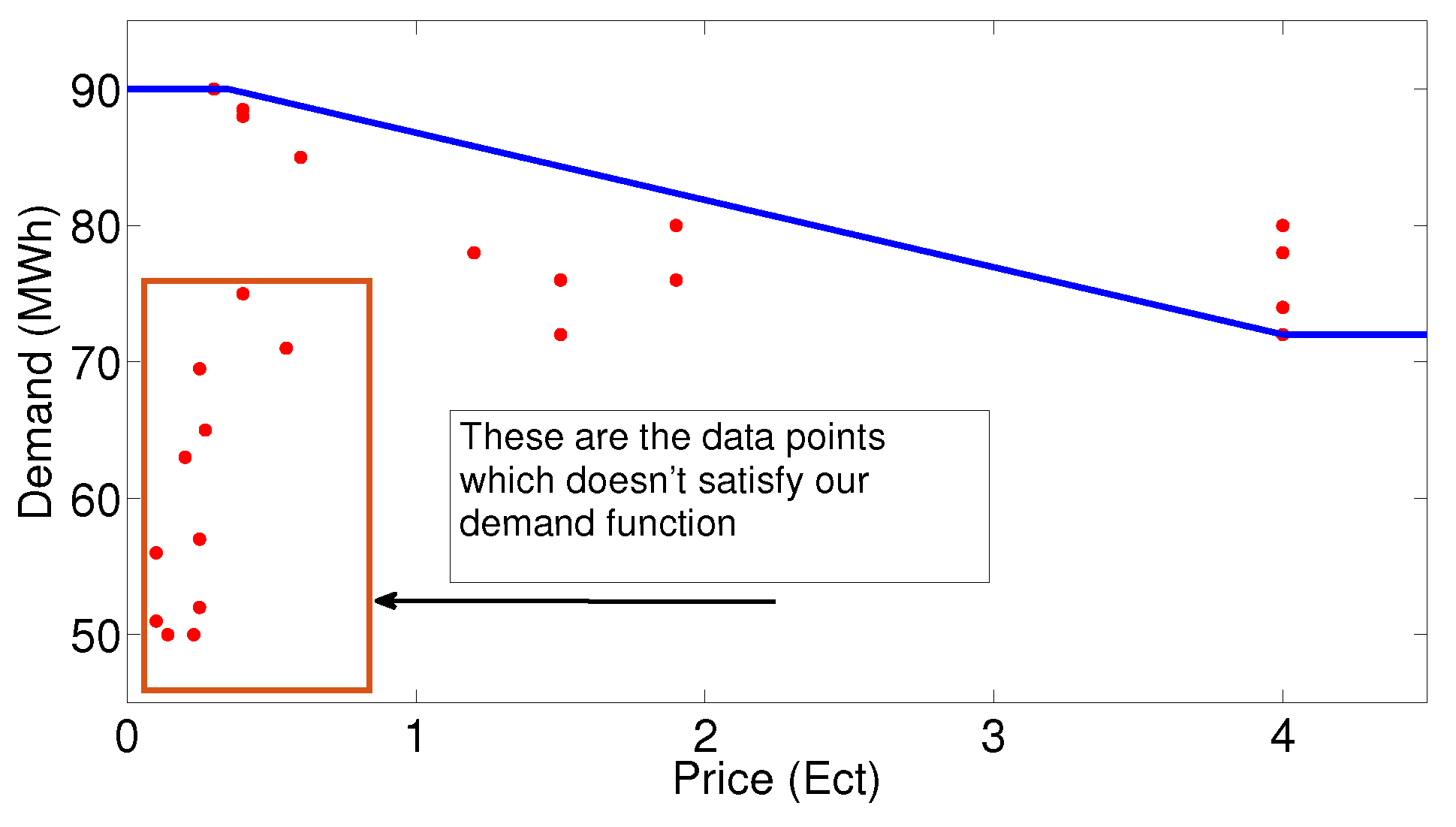
- There are always limited consumers to which the electricity has to be supplied. We assume that for a low price of electricity there must be of the consumer. Therefore, DSLM shifts all the load of consumers to that point where electricity price is low. At (, ) the demand elasticity deteriorates as defined in Figure 7.
- 2.
- As there are critical loads, electricity must be supplied to them even at a high price . Therefore, the demand of consumers will be low at this point (, ) and demand elasticity also deteriorates at this point.
- 3.
- In the range between and , demand condition is elastic. When the pricing signal is between these two points, the demand of consumers will depend upon the pricing signal. The elasticity of demand in this region is determined as shown in Equation (10);
5. Simulations and Discussion
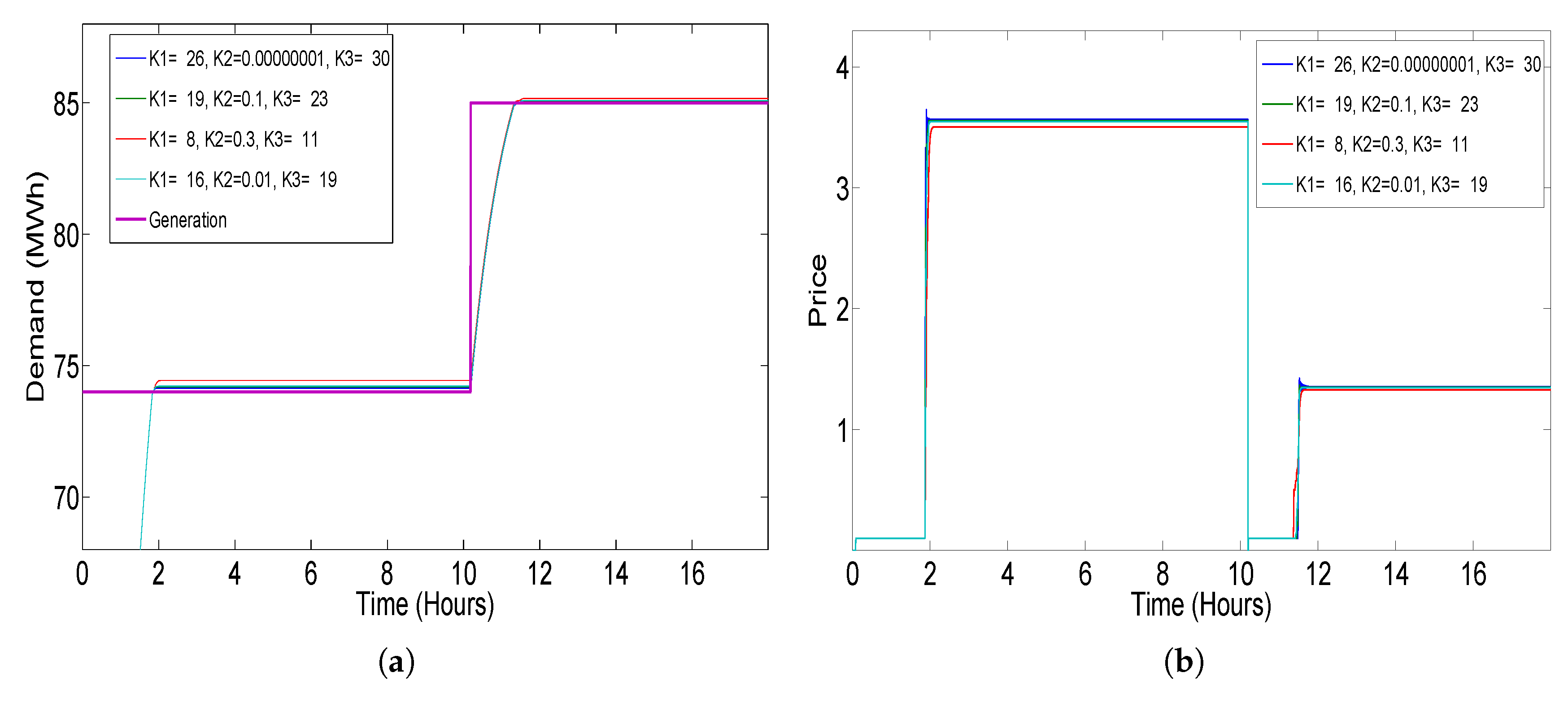
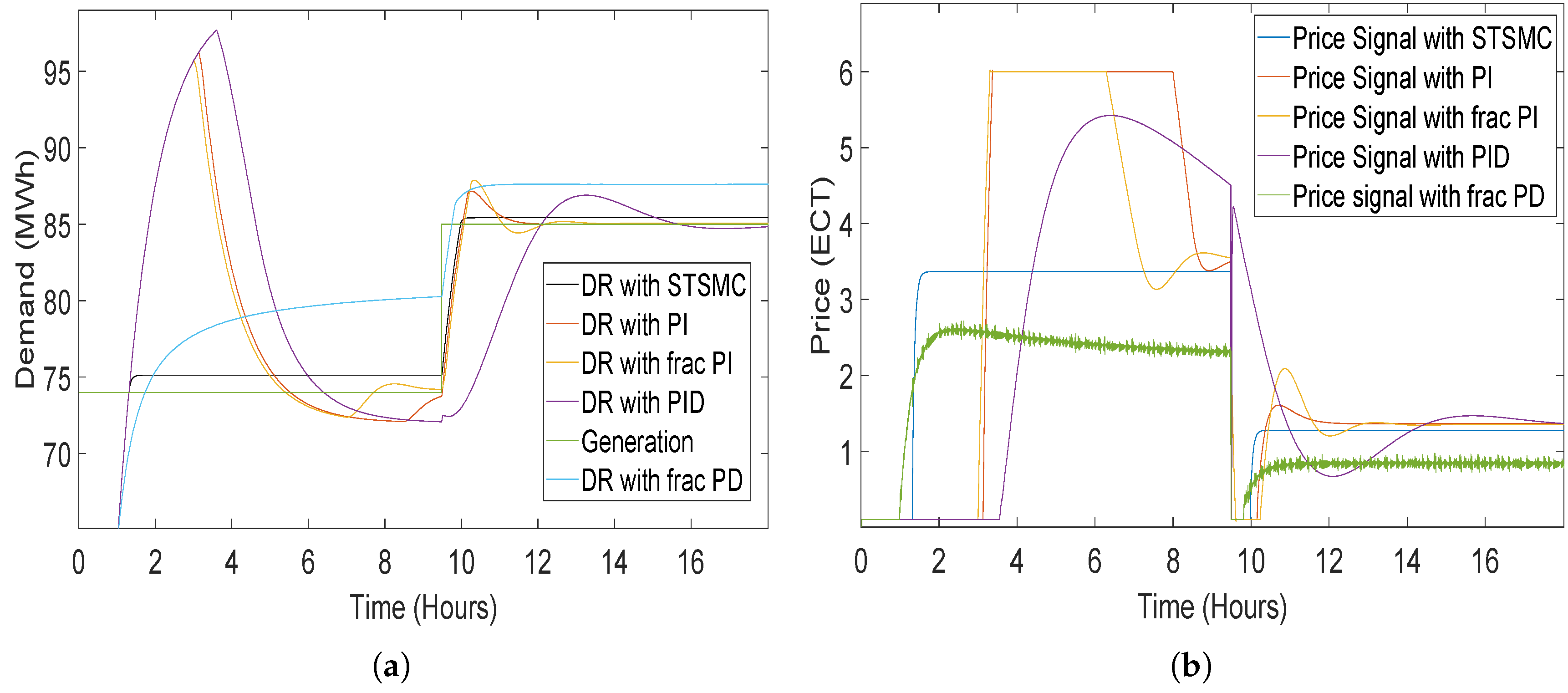
5.1. Step Response Analysis
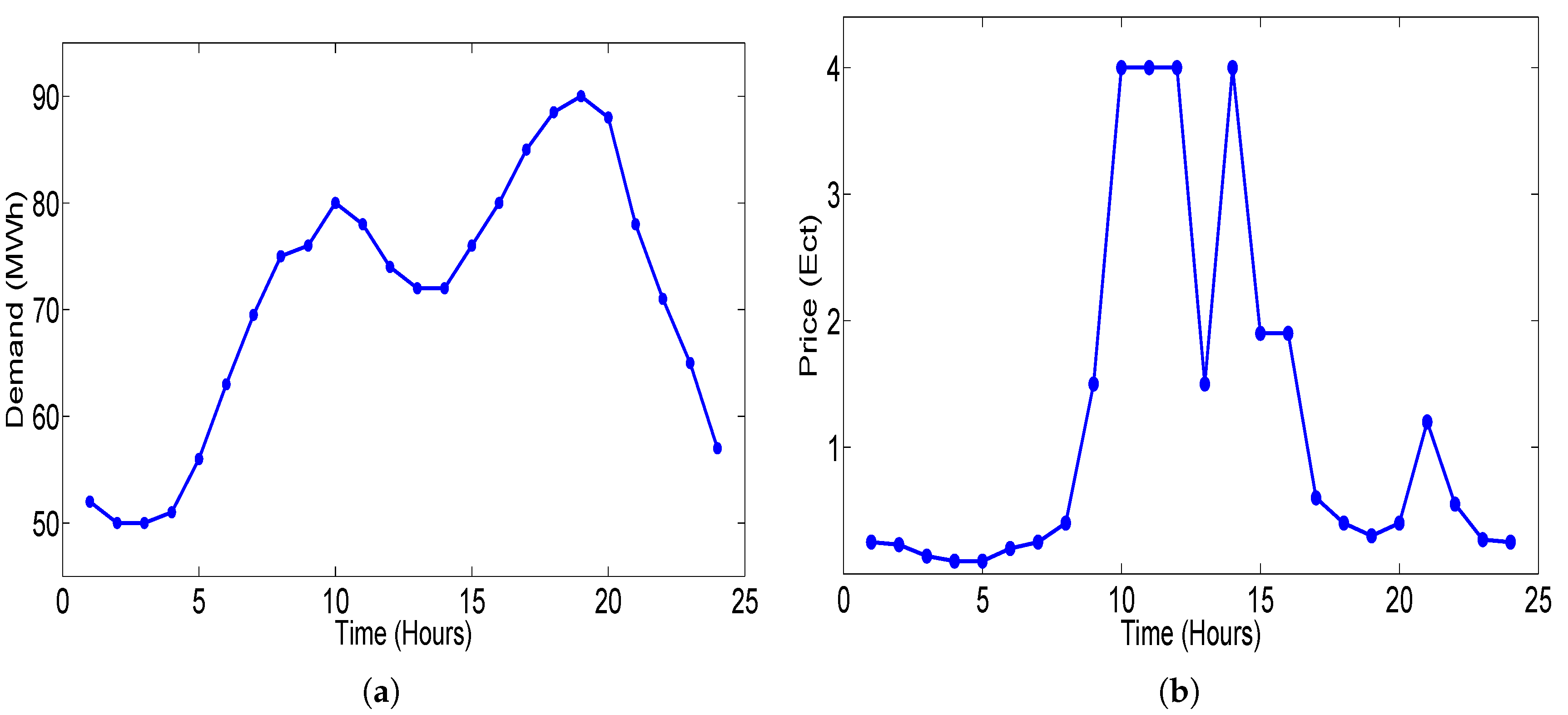
5.2. Scenario: Demand and Price Response of the System
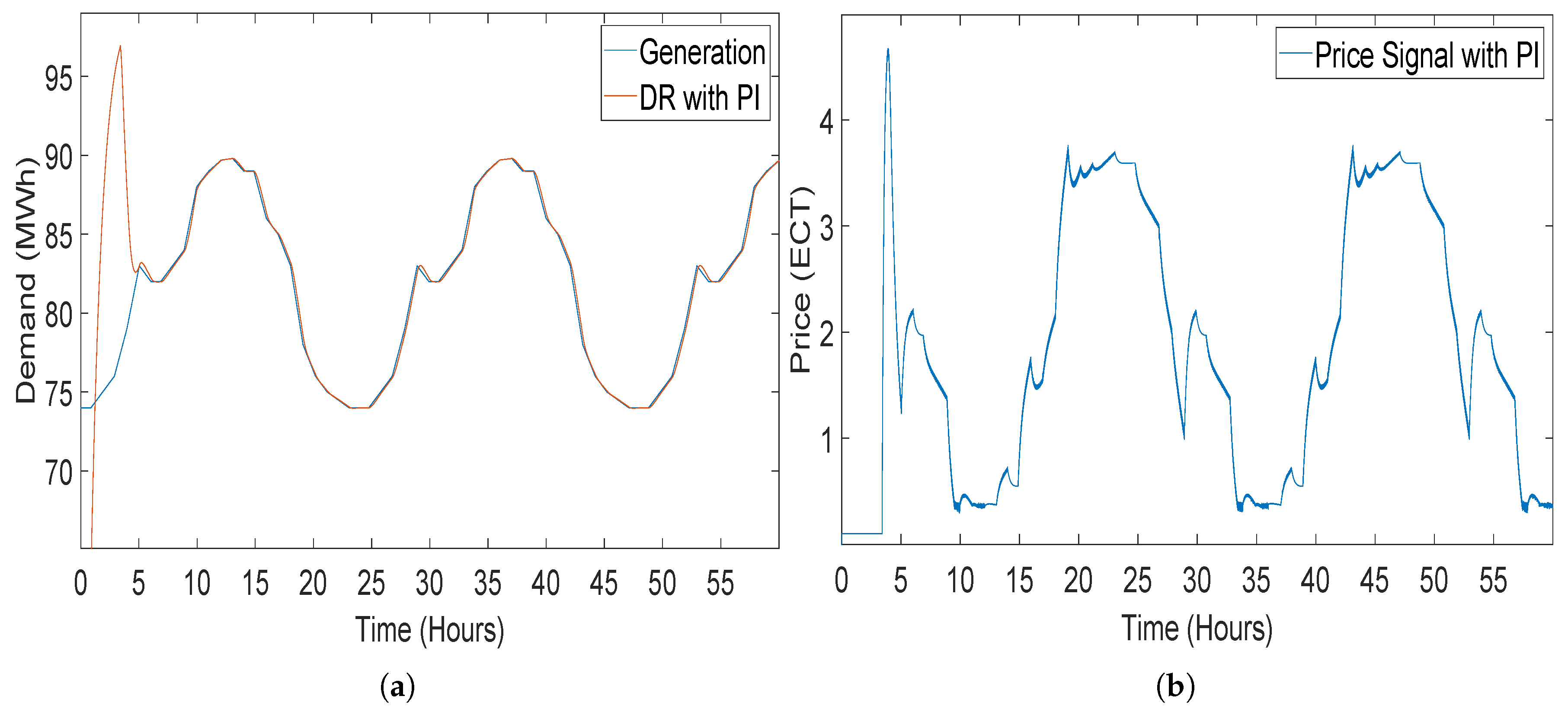
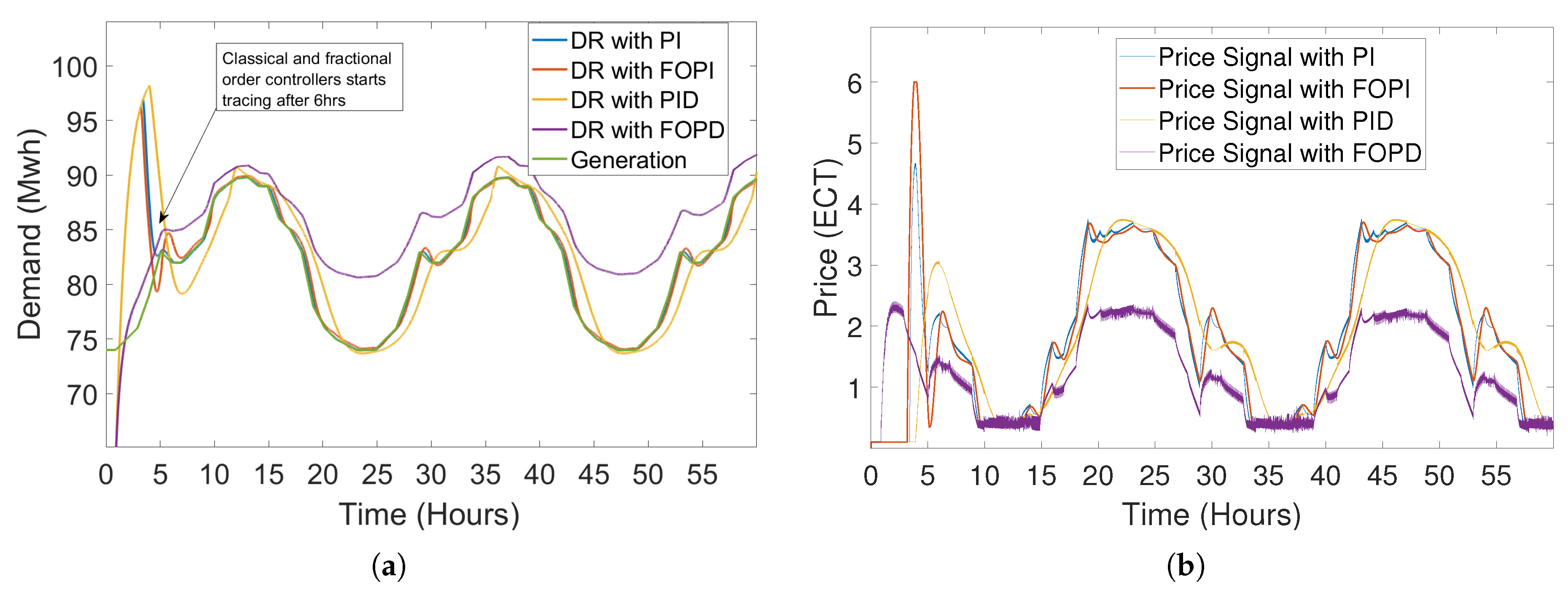
5.2.1. Closed-Loop Elastic Demand Control Using PI Controller
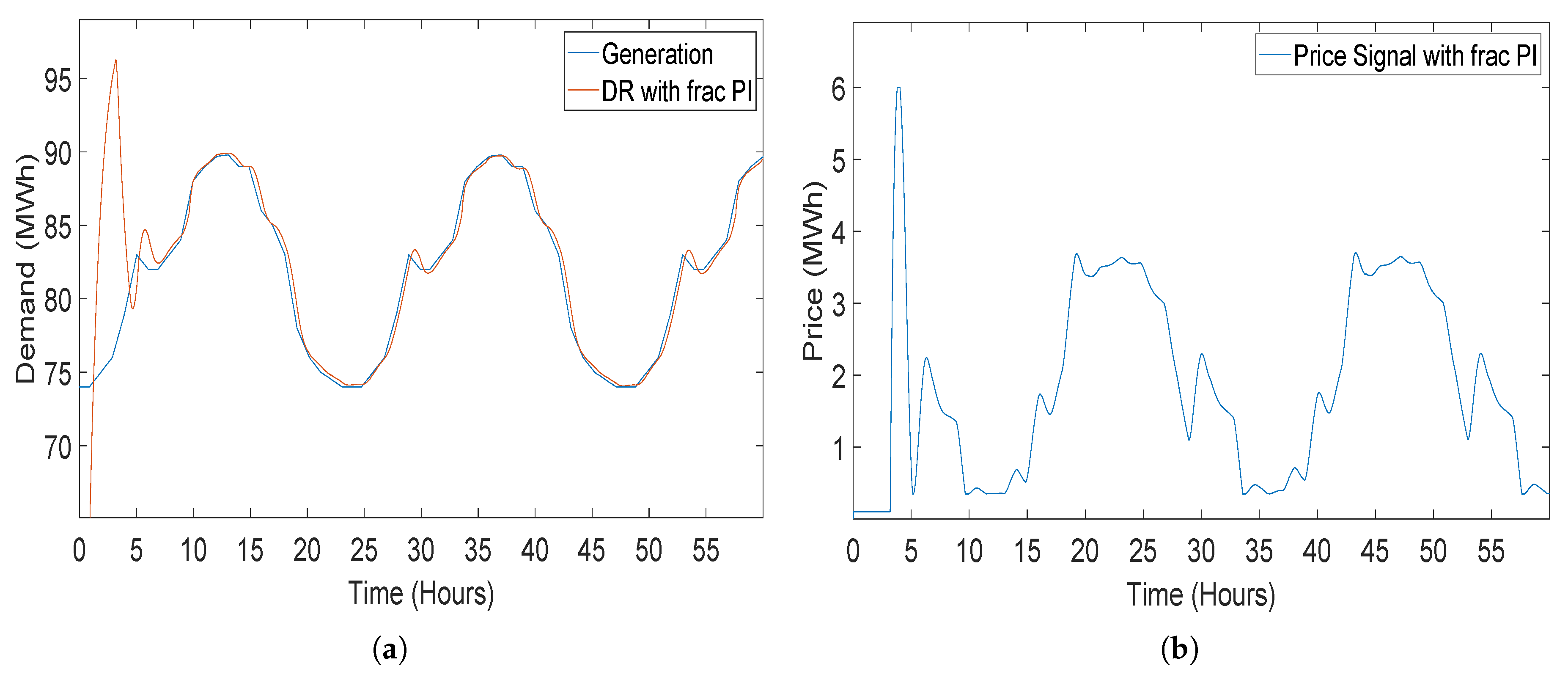
5.2.2. Closed-Loop Elastic Demand Control Using Fractional Order PI (FOPI) Controller
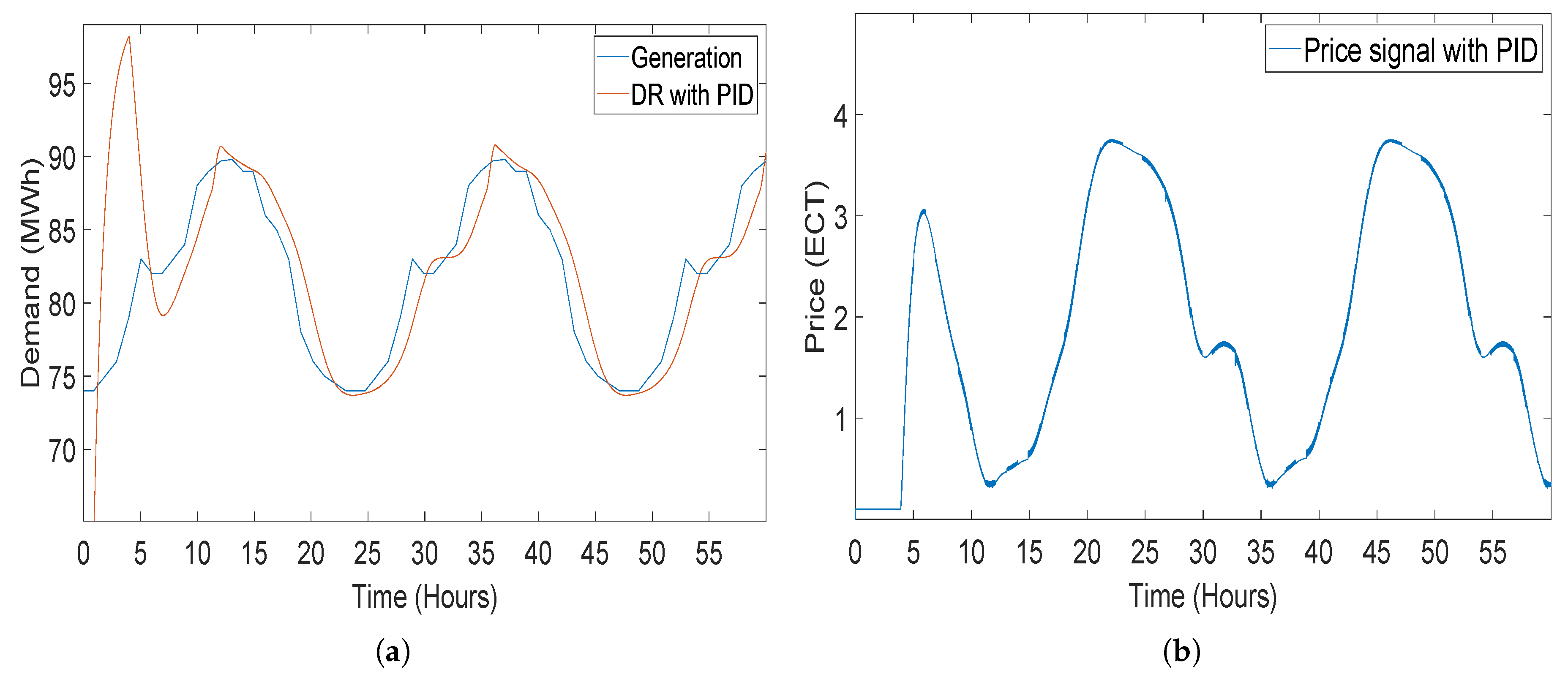
5.2.3. Closed-Loop Elastic Demand Control Using PID Controller
5.2.4. Closed-Loop Elastic Demand Control Using FOPD Controller
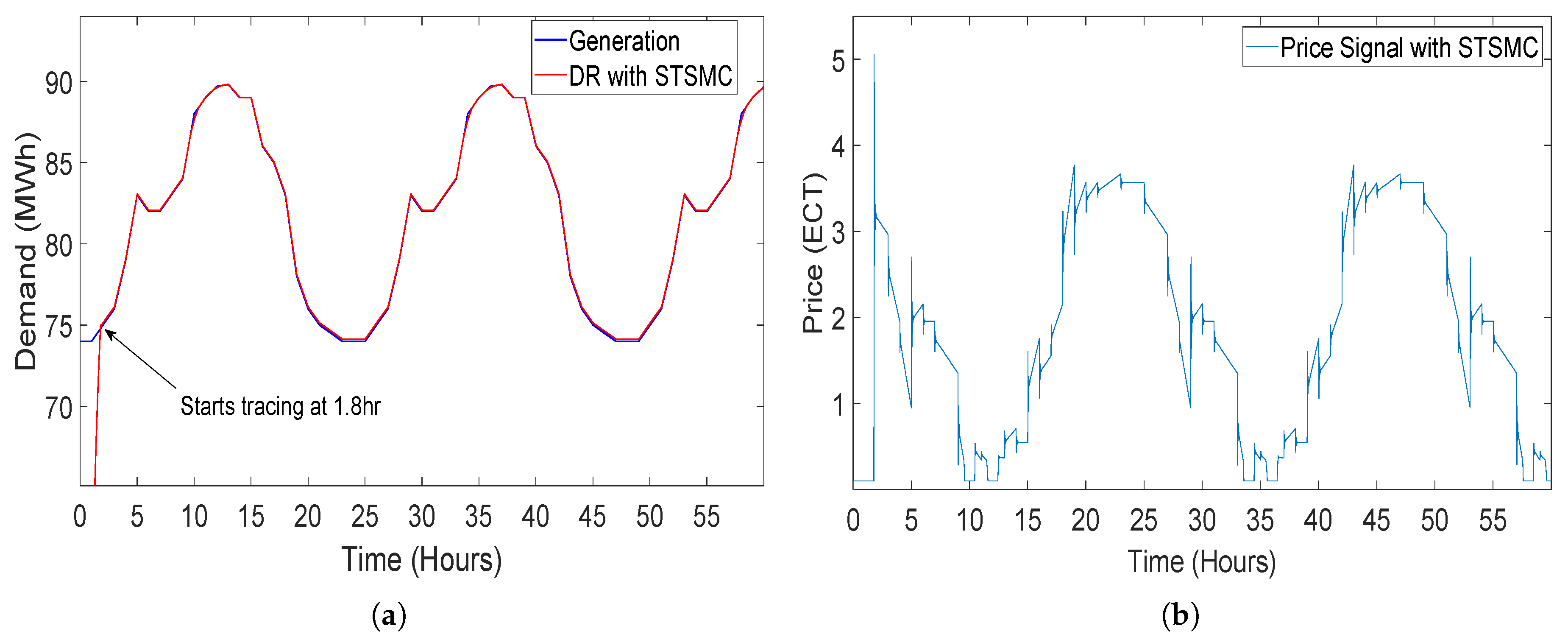
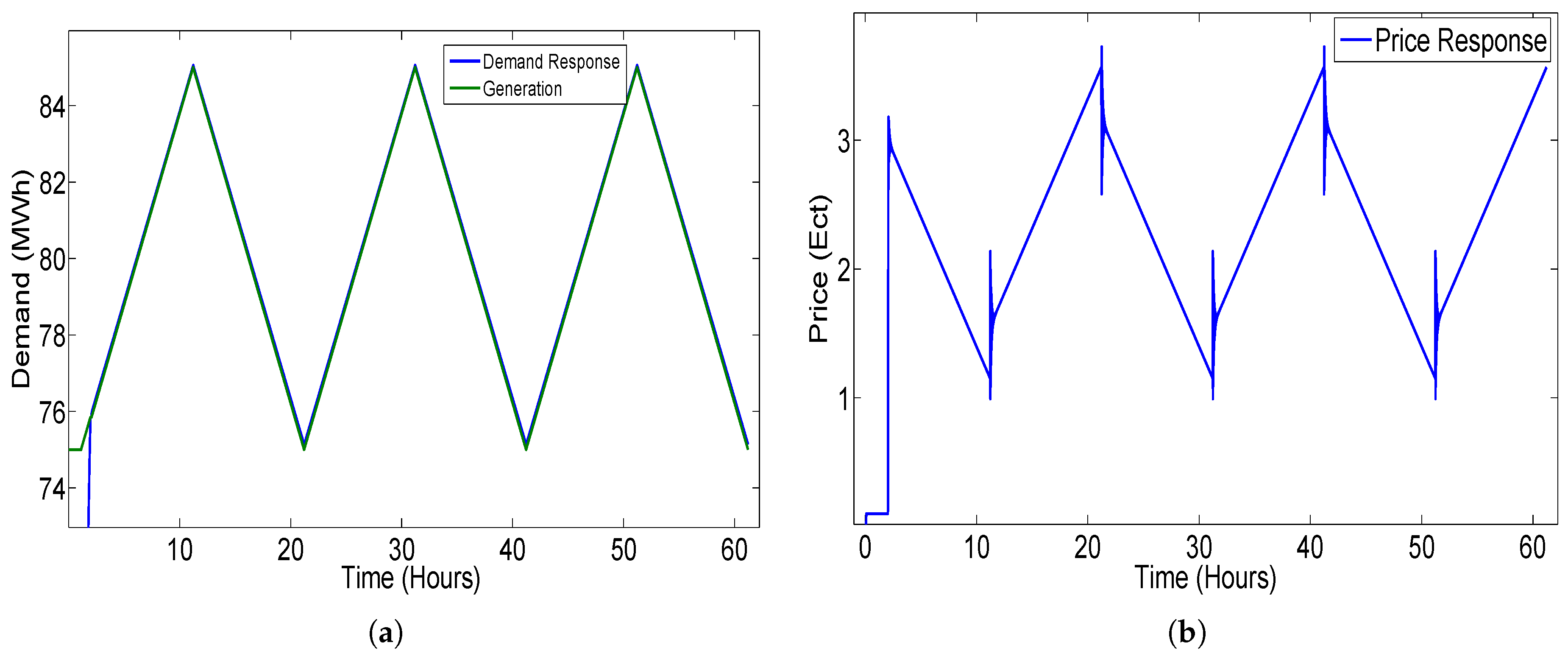
5.2.5. Closed-Loop Elastic Demand Control Using STSMC Controller
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Symbols | Abbreviations |
| Time constant (h) | |
| Fractional operator in FOPI controller | |
| Fractional operator in FOPD controller | |
| C(t) | Controller function |
| Do | Local demand (MWh) |
| Local minimum demand (MWh) | |
| Local maximum demand (MWh) | |
| Do(t) | Instant demand (MWh) |
| D(p) | Piece-wise-price demand function |
| Low demand (MWh) | |
| High demand (MWh) | |
| DSLM | Demand side load management |
| DR | Demand response |
| e | Error (Mismatch between generation and demand |
| FOPI | Fraction order proportional integral controller |
| FOPD | Fractional order proportional derivative controller |
| G(t) | Overall instant generation (MWh) |
| Proportional coefficient | |
| Integral coefficient | |
| Derivative coefficient | |
| Integral coefficient | |
| Delay (sec) | |
| p | Pricing signal (ECT) |
| PI | Proportional integral |
| PID | Proportional integral derivative |
| Low price (ECT) | |
| High price (ECT) | |
| STSMC | Super twisting sliding mode controller |
| SMC | Sliding mode controller |
| Transmission from local renewable energy system (MWh) | |
| Transmission from bulk utility supply (MWh) |
References
- Nadeem, J.; Hafeez, G.; Iqbal, S.; Alrajeh, N.; Alabed, M.S.; Guizani, M. Energy efficient integration of renewable energy sources in the smart grid for demand side management. IEEE Access 2018, 6, 77077–77096. [Google Scholar]
- Ghulam, H.; Wadud, Z.; Khan, I.U.; Khan, I.; Shafiq, Z.; Usman, M.; Khan, M.U.A. Efficient Energy Management of IoT-Enabled Smart Homes Under Price-Based Demand Response Program in Smart Grid. Sensors 2020, 20, 3155. [Google Scholar]
- Ghulam, H.; Javaid, N.; Iqbal, S.; Khan, F.A. Optimal Residential Load Scheduling under Utility and Rooftop Photovoltaic Units. Energies 2018, 11, 611. [Google Scholar]
- Ghulam, H.; Alimgeer, K.S.; Khan, I. Electric Load Forecasting based on Deep Learning and Optimized by Heuristic Algorithm in Smart Grid. Appl. Energy 2020, 306, 114915. [Google Scholar] [CrossRef]
- Ghulam, H.; Islam, N.; Ali, A.; Ahmad, S.; Usman, M.; Alimgeer, K.S. A Modular Framework for Optimal Load Scheduling under Price-Based Demand Response Scheme in Smart Grid. Processes 2019, 7, 499. [Google Scholar]
- Ghulam, H.; Alimgeer, K.S.; Wadud, Z.; Khan, I.; Shafiq, Z.; Khan, M.U.A.; Khan, F.A.; Derhab, A. A Novel Accurate and Fast Converging Deep Learning-Based Model for Electrical Energy Consumption Forecasting in a Smart Grid. Energies 2020, 13, 2244. [Google Scholar]
- Ghulam, H.; Alimgeer, K.S.; Qazi, A.B.; Khan, I.; Usman, M.; Khan, F.A.; Wadud, Z. A Hybrid Approach for Energy Consumption Forecasting with a New Feature Engineering and Optimization Framework in Smart Grid. IEEE Access 2020. [Google Scholar] [CrossRef]
- Preeti, D.; Dogra, S.; Sharma, V.; Pulluri, H.; Gouthamkumar, N.; Rao, U.M. Performance Analysis of Classical Controllers Tuned Using Heuristic Approaches for Frequency Regulation. In Applications of Computing, Automation and Wireless Systems in Electrical Engineering; Springer: Singapore, 2019; pp. 457–465. [Google Scholar]
- Preeti, D.; Sharma, V.; Naresh, R. Automatic generation control using disrupted oppositional based gravitational search algorithm optimised sliding mode controller under deregulated environment. IET Gener. Trans. Distrib. 2016, 10, 3995–4005. [Google Scholar]
- Weng, Y.P.; Gao, X.W. Data-driven sliding mode control of unknown MIMO nonlinear discrete-time systems with moving PID sliding surface. J. Frankl. Inst. 2017, 354, 6463–6502. [Google Scholar] [CrossRef]
- Preeti, D.; Sharma, V.; Naresh, R. Hybridized gravitational search algorithm tuned sliding mode controller design for load frequency control system with doubly fed induction generator wind turbine. Opt. Control. Appl. Methods 2017, 38, 993–1003. [Google Scholar]
- Prabhat, K.; Kothari, D.P. Recent philosophies of automatic generation control strategies in power systems. IEEE Trans. Power Syst. 2005, 20, 346–357. [Google Scholar]
- Alessandro, P.; Pisano, A.; Usai, E. Parameter tuning and chattering adjustment of super-twisting sliding mode control system for linear plants. In Proceedings of the 2012 12th International Workshop on Variable Structure Systems, Mumbai, India, 12–14 January 2020; pp. 479–484. [Google Scholar]
- Asim, K. Closed loop elastic demand control by dynamic energy pricing in smart grids. Energy 2019, 176, 596–603. [Google Scholar]
- Duan, Q. A price-based demand response scheduling model in day-ahead electricity market. In Proceedings of the 2016 IEEE Power and Energy Society General Meeting (PESGM), Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Liang, D.; Bo, Z.; Yan, Q.; Xu, Y.-J. Optimal control model of electric vehicle demand response based on real—time electricity price. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 1815–1818. [Google Scholar]
- Ghazvini, F.; Ali, M.; Soares, J.; Morais, H.; Castro, R.; Vale, Z. Dynamic pricing for demand response considering market price uncertainty. Energies 2017, 10, 1245. [Google Scholar] [CrossRef] [Green Version]
- Hu, F.; Chen, W. One type of smart meter with demand control Local demand response with smart meter. In Proceedings of the 2014 9th IEEE Conference on Industrial Electronics and Applications, Hangzhou, China, 9–11 June 2014; pp. 546–549. [Google Scholar]
- Yang, B.; Kun, S.; Li, D.; Xin, Y.; Bin, L.; Li, Y. Research on Power Flexible Load Regulation Technology Based on Demand Response. In Proceedings of the 2018 8th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 15–17 June 2018; pp. 150–153. [Google Scholar]
- Sankar, V.; Jishnu, C.; Hareesh, V.; Nair, M.G. Integration of demand response with prioritized load optimization for multiple homes. In Proceedings of the 2017 International Conference on Technological Advancements in Power and Energy (TAP Energy), Kollam, India, 21–23 December 2017; pp. 1–6. [Google Scholar]
- Ahmed Maytham, S.; Mohamed, A.; Khatib, T.; Shareef, H.; Homod, R.Z.; Ali, J.A. Real time optimal schedule controller for home energy management system using new binary backtracking search algorithm. Energy Build. 2017, 138, 215–227. [Google Scholar] [CrossRef]
- Irfan, M.M.; Siddiq, A.; Tariq, M.O.; Ali, A.; Zahra, A. Economically Effective and Intelligently Responsive Home Energy Management System. Mehran Univ. Res. J. Eng. Technol. 2019, 38, 599–608. [Google Scholar]
- Zhou, W.; Tazvinga, H.; Xia, X. Demand side management of photovoltaic-battery hybrid system. Appl. Energy 2015, 148, 294–304. [Google Scholar]
- Fuad, U.H.; Hamid, S.; Khan, W.A.; Ali, M.; Rehman, S. Smart Grid Intelligent Energy Management System with Cost Optimization in Power System. In Proceedings of the 2019 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, UAE, 26 March–10 April 2019; pp. 1–6. [Google Scholar]
- Paddy, F.; Fitzpatrick, C. Demand side management of industrial electricity consumption: Promoting the use of renewable energy through real-time pricing. Appl. Energy 2014, 113, 11–21. [Google Scholar]
- Bruno, C.; Soares, J.; Vale, Z.; Corchado, J.M. Optimal distribution grid operation using DLMP-based pricing for electric vehicle charging infrastructure in a smart city. Energies 2019, 12, 686. [Google Scholar]
- Veni, C.C.; Basu, M.; Sunderland, K. Demand Response and Consumer Inconvenience. In Proceedings of the 2019 International Conference on Smart Energy Systems and Technologies (SEST), Porto, Portugal, 9–11 September 2019; pp. 1–6. [Google Scholar]
- Pavithra, N.; Priya Esther, B. Priya Esther. Residential demand response using genetic algorithm. In Proceedings of the 2017 Innovations in Power and Advanced Computing Technologies (i-PACT), Vellore, India, 21–22 April 2017; pp. 1–4.
- Arabul Keskin, F.; Arabul, A.Y.; Kumru, C.F.; Boynuegri, A.R. Providing energy management of a fuel cell–battery–wind turbine–solar panel hybrid off grid smart home system. Int. J. Hydrogen Energy 2017, 42, 26906–26913. [Google Scholar] [CrossRef]
- Calvin, T.; Kumar, A.; Flores-Cerrillo, J.; Baldea, M. Optimal demand response scheduling of an industrial air separation unit using data-driven dynamic models. Comput. Chem. Eng. 2019, 126, 22–34. [Google Scholar]
- Vedullapalli Divya, T.; Hadidi, R.; Schroeder, B. Optimal Demand Response in a building by Battery and HVAC scheduling using Model Predictive Control. In Proceedings of the 2019 IEEE/IAS 55th Industrial and Commercial Power Systems Technical Conference (I & CPS), Calgary, AB, Canada, 5–8 May 2019; pp. 1–6. [Google Scholar]
- Xue, X.; Wang, S.; Yan, C.; Cui, B. A fast chiller power demand response control strategy for buildings connected to smart grid. Appl. Energy 2015, 137, 77–87. [Google Scholar] [CrossRef]
- Ogunjuyigbe, A.S.O.; Monyei, C.G.; Ayodele, T.R. Price based demand side management: A persuasive smart energy management system for low/medium income earners. Sustain. Cities Soc. 2015, 7, 80–94. [Google Scholar] [CrossRef]
- Xing, Y.; Wright, D.; Kumar, S.; Lee, G.; Ozturk, Y. Real-time residential time-of-use pricing: A closed-loop consumers feedback approach. In Proceedings of the 2015 Seventh Annual IEEE Green Technologies Conference, New Orleans, LA, USA, 15–17 April 2015; pp. 132–138. [Google Scholar]
- Xing, Y.; Wright, D.; Kumar, S.; Lee, G.; Ozturk, Y. Enabling consumer behavior modification through real time energy pricing. In Proceedings of the 2015 IEEE International Conference on Pervasive Computing and Communication Workshops (PerCom Workshops), St. Louis, MO, USA, 23–27 March 2015; pp. 311–316. [Google Scholar]
- Alagoz, B.B.; Kaygusuz, A.; Akcin, M.; Alagoz, S. A closed-loop energy price controlling method for real-time energy balancing in a smart grid energy market. Energy 2013, 59, 95–104. [Google Scholar] [CrossRef]
- Mohammad, R.; Fotuhi-Firuzabad, M.; Zareipour, H. Home energy management incorporating operational priority of appliances. Int. J. Electr. Power Energy Syst. 2016, 74, 286–292. [Google Scholar]
- Kai, M.; Yao, T.; Yang, J.; Guan, X. Residential power scheduling for demand response in smart grid. Int. J. Electr. Power Energy Syst. 2016, 78, 320–325. [Google Scholar]
- Man, T.K.; Chan, S. Demand response optimization for smart home scheduling under real-time pricing. IEEE Trans. Smart Grid 2012, 3, 1812–1821. [Google Scholar]
- Paterakis Nikolaos, G.; Erdinc, O.; Bakirtzis, A.G.; Catalão, J.P.S. Optimal household appliances scheduling under day-ahead pricing and load-shaping demand response strategies. IEEE Trans. Ind. Inform. 2015, 11, 1509–1519. [Google Scholar] [CrossRef]
- Huang, Y.; Mao, S.; Nelms, R.M. Adaptive electricity scheduling in microgrids. IEEE Trans. Smart Grid 2014, 5, 270–281. [Google Scholar] [CrossRef] [Green Version]
- Pedrasa Michael Angelo, A.; Spooner, T.D.; MacGill, I.F. Coordinated scheduling of residential distributed energy resources to optimize smart home energy services. IEEE Trans. Smart Grid 2010, 1, 134–143. [Google Scholar] [CrossRef]
- Alagoz Baykant, B.; Kaygusuz, A. Dynamic energy pricing by closed-loop fractional-order PI control system and energy balancing in smart grid energy markets. Trans. Inst. Meas. Control. 2016, 38, 565–578. [Google Scholar] [CrossRef]
- Levant, A. Sliding order and sliding accuracy in sliding mode control. Int. J. Control. 1993, 58, 1247–1263. [Google Scholar] [CrossRef]
- Santiesteban, R.; Fridman, L.; Moreno, J. Finite-time convergence analysis for “twisting” controller via a strict lyapunov function. In Proceedings of the 11th Workshop on Variable Structure Systems, Mexico City, Mexico, 26–28 June 2010; pp. 1–6. [Google Scholar]
- Polyakov, A.; Poznyak, A. Lyapunov function design for fifinitetime convergence analysis: “Twisting” controller for second-order sliding mode realization. Automatica 2009, 45, 444–448. [Google Scholar] [CrossRef]
- Oza, H.B.; Orlov, Y.V.; Spurgeon, S.K. Settling time estimate for a second order sliding mode controller: A homogeneity approach. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August–2 September 2011. [Google Scholar]
- Moreno, J.; Osorio, M. A Lyapunov approach to second-order sliding mode controllers and observers. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 2856–2861. [Google Scholar]
- Polyakov, A.; Poznyak, A. Reaching time estimation for “supertwisting” second order sliding mode controller via lyapunov function designing. Autom. Control. IEEE Trans. 2009, 54, 1951–1955. [Google Scholar] [CrossRef]
- Orlov, Y.; Aoustin, Y.; Chevallereau, C. Finite time stabilization of a perturbed double integrator—Part I: Continuous sliding mode-based output feedback synthesis. IEEE Trans. Autom. Control. 2010, 56, 3. [Google Scholar] [CrossRef]
- Lebastard, V.; Austin, Y.; Plestan, F. Step-by-step sliding mode observer for control of a walking biped robot by using only actuated variables measurement. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AT, Canada, 2–6 August 2005; pp. 559–564. [Google Scholar]
- Shtessel, Y.B.; Shkolnikov, I.A.; Levant, A. Smooth second-order sliding modes: Missile guidance application. Automatica 2007, 43, 1470–1476. [Google Scholar] [CrossRef]
- Niknam, T.; Golestaneh, F.; Malekpour, A. Probabilistic energy and operation management of a microgrid containing wind/photovoltaic/fuel cell generation and energy storage devices based on point estimate method and self-adaptive gravitational search algorithm. Energy 2012, 43, 427–437. [Google Scholar] [CrossRef]
- Akcin Murat, B.; Alagoz, B.; Kaygusuz, A. Demand Elasticity Estimation Based on Piecewise Linear Demand Response Modeling of Smart Grid Energy Market. In Proceedings of the ENTECH’15 III, Istanbul, Turkey, 21–22 December 2015. [Google Scholar]
- Ahmad Khan, T.; Kalimullah; Hafeez, G.; Khan, I.; Ullah, S.; Waseem, A.; Ullah, Z. Energy Demand Control Under Dynamic Price-based Demand Response Program in Smart Grid. In Proceedings of the 2020 2nd International Conference on Electrical Communication and Computer Engineering (ICECCE-2020), Istanbul, Turkey, 14–15 April 2020; pp. 31–36. [Google Scholar]
- Mary, G.; Carter, J.; Alexander, R.; Charnock, G. Getting the most from community generation-an economic and technical model to control small scale renewable community generation and create a local energy economy. In Proceedings of the CIRED 2009-The 20th International Conference and Exhibition on Electricity Distribution, Prague, Czech Republic, 8–11 June 2009; pp. 1–15. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Techniques | Models | Objectives | Results | Limitations |
|---|---|---|---|---|---|
| [19] | MILP | Flexible DR load model | Flexible load control based on DR | Efficiency, power system adjustment capability and safety of power grid operation enhanced | Only flexible loads are considered |
| [20] | Master controller | Advanced metering infrastructure with HEMS | To better manage the energy at the consumer side | Based on the categorisation of DR programs proper load management is accomplished | User discomfort |
| [21] | BBSA and BPSO | HEMS | To reduce energy cost, electricity bill and peak load | BBSA gives better results than BPSO | PAR is not considered |
| [22] | MOPSO and BILP | Intelligently responsive HEMS | To reduce cost and carbon emission | Electricity cost is reduced by 10.25% and also carbon emission is reduced | Carbon emission is reduced and operating cost is increased |
| [23] | MPC | Hybrid system under TOU with power selling | A battery storage system with solar panels to reduce cost in peak hours | Batteries provide power in peak hours and reduce the monthly cost | PAR consumer comfort is not considered |
| [24] | LSHS | Intelligent energy management system (IEMS) | Load scheduling at consumer end with increasing efficiency | The system is optimised | System complexity and user discomfort increased |
| [27] | MILP | HEMS | To reduce consumer inconvenience caused by DR programs | Increased energy efficiency within domestic environment | Did not considered uncertainty in DR |
| [28] | GA | DSLM using load-shifting concept | To reduce overall peak load demand and operational cost | Reduction in power demand and cost of the utilities | Cost reduced but ignored consumers’ comfort |
| [29] | EMA and Fuzzy logic controller | HEMS | Electricity and fuel cost reduction with increasing efficiency and lifetime of fuel cell | Energy efficiency of solar, wind and fuel cell increased | Did not considered carbon emission reduction |
| [30] | MPC | Dynamic optimisation- based DR scheduling framework and low-order Hammerstein Wiener model | Energy management and electricity cost reduction | Electricity cost reduced | Considered price forecast but didn’t considered DR uncertainty |
| [31] | MPC | BESS and HVAC Scheduling | To optimally use battery storage | Electricity cost reduced | PAR and carbon emission not considered |
| [33,34,35] | MMIGA, CBI | Persuasive smart energy management system (PSEMS) | Prediction of consumers’ demand in SG | With closed-loop DR programs, demand becomes more deterministic and predictable | Uncertainty in demand is not considered |
| [36] | PID controller | Dynamic demand responsive generation management | To decrease the electricity bills of consumers and operational cost | Operational and electricity bill reduced | Electricity cost reduced and user discomfort increased |
| [37] | MILP | Price-based HEMS | Optimise the energy consumption by scheduling of appliances in smart home | Electricity cost reduced | System complexity Increased |
| PI | FOPI | PID | FOPD | STSMC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| −1 | −2 | −0.1 | −1.2 | 0.8 | −0.01 | −0.2 | −0.01 | −0.2 | −0.3 | 0.3 | −26 | 0.001 | −30 |
| DR of Closed-Loop Elastic Demand Control by Different Controllers. | |||||||
|---|---|---|---|---|---|---|---|
| Time (hours) | Generation (MW) | DR (PI) | DR (FOPI) | DR (PID) | DR (FOPD) | DR (STSMC) | |
| 2 | 75.11 | 87.91 | 87.91 | 74.96 | 76.08 | 76.10 | |
| 4 | 79.12 | 87.47 | 84.56 | 98.20 | 81.59 | 79.71 | |
| 6 | 82.04 | 82.29 | 84.39 | 81.64 | 84.92 | 82.08 | |
| 8 | 83.11 | 82.98 | 83.44 | 80.24 | 85.71 | 83.05 | |
| 10 | 88.03 | 87.82 | 88.01 | 84.52 | 89.30 | 87.50 | |
| 12 | 89.64 | 89.63 | 89.77 | 90.66 | 90.72 | 89.61 | |
| 14 | 89.08 | 89.11 | 89.37 | 89.47 | 90.35 | 89.22 | |
| 16 | 85.96 | 86.25 | 86.88 | 88.36 | 88.39 | 86.06 | |
| 18 | 83.06 | 83.29 | 83.79 | 85.15 | 86.43 | 83.08 | |
| 20 | 76.34 | 76.43 | 76.50 | 79.86 | 82.10 | 76.13 | |
| 22 | 74.57 | 74.59 | 74.84 | 74.64 | 80.93 | 74.63 | |
| 24 | 74.01 | 73.98 | 74.14 | 73.70 | 80.68 | 74.13 | |
| 26 | 75.23 | 75.11 | 75.11 | 74.25 | 81.43 | 75.11 | |
| 28 | 79.56 | 79.12 | 78.77 | 76.37 | 84.06 | 79.04 | |
| 30 | 82.11 | 82.13 | 82.49 | 81.59 | 86.23 | 82.09 | |
| 32 | 83.24 | 83.12 | 83.05 | 83.09 | 86.75 | 83.04 | |
| 34 | 88.15 | 88.02 | 87.90 | 84.51 | 90.36 | 87.55 | |
| 36 | 89.70 | 89.69 | 89.59 | 90.40 | 91.64 | 89.60 | |
| 38 | 89.01 | 89.08 | 89.16 | 89.52 | 90.97 | 89.03 | |
| 40 | 85.99 | 86.36 | 86.90 | 88.36 | 88.94 | 86.09 | |
| 42 | 83.14 | 83.36 | 83.76 | 85.20 | 86.87 | 83.10 | |
| 44 | 76.40 | 76.49 | 76.47 | 79.99 | 82.49 | 76.15 | |
| 46 | 74.59 | 74.61 | 74.79 | 74.69 | 81.24 | 74.64 | |
| 48 | 74.01 | 73.98 | 74.08 | 73.70 | 80.95 | 74.13 | |
| 50 | 75.19 | 75.06 | 75.02 | 74.23 | 81.65 | 75.10 | |
| 52 | 79.44 | 78.99 | 78.60 | 76.30 | 84.19 | 79.01 | |
| 54 | 82.01 | 82.18 | 82.56 | 81.48 | 86.45 | 82.10 | |
| 56 | 83.21 | 83.08 | 82.98 | 83.09 | 86.91 | 83.03 | |
| 58 | 88.12 | 87.96 | 87.81 | 84.45 | 90.56 | 87.53 | |
| 60 | 89.67 | 89.66 | 89.53 | 90.27 | 91.86 | 89.60 | |
| Time (hours) | Generation (MW) | PI | FOPI | PID | FOPD | STSMC |
|---|---|---|---|---|---|---|
| 2 | 75.11 | −12.8000 | −12.8000 | 0.1500 | −0.9700 | −0.9900 |
| 4 | 79.12 | −8.3500 | −5.4400 | −19.0800 | −2.4700 | −0.5900 |
| 6 | 82.04 | −0.2500 | −2.3500 | 0.4000 | −2.8800 | −0.0400 |
| 8 | 83.11 | 0.1300 | −0.3300 | 2.8700 | −2.6000 | 0.0600 |
| 10 | 88.03 | 0.2100 | 0.0200 | 3.5100 | −1.2700 | 0.5300 |
| 12 | 89.64 | 0.0100 | −0.1300 | −1.0200 | −1.0800 | 0.0300 |
| 14 | 89.08 | −0.0300 | −0.2900 | −0.3900 | −1.2700 | −0.1400 |
| 16 | 85.96 | −0.2900 | −0.9200 | −2.4000 | −2.4300 | −0.1000 |
| 18 | 83.06 | −0.2300 | −0.7300 | −2.0900 | −3.3700 | −0.0200 |
| 20 | 76.34 | −0.0900 | −0.1600 | −3.5200 | −5.7600 | 0.2100 |
| 22 | 74.57 | −0.0200 | −0.2700 | −0.0700 | −6.3600 | −0.0600 |
| 24 | 74.01 | 0.0300 | −0.1300 | 0.3100 | −6.6700 | −0.1200 |
| 26 | 75.23 | 0.1200 | 0.1200 | 0.9800 | −6.2000 | 0.1200 |
| 28 | 79.56 | 0.4400 | 0.7900 | 3.1900 | −4.5000 | 0.5200 |
| 30 | 82.11 | −0.0200 | −0.3800 | 0.5200 | −4.1200 | 0.0200 |
| 32 | 83.24 | 0.1200 | 0.1900 | 0.1500 | −3.5100 | 0.2000 |
| 34 | 88.15 | 0.1300 | 0.2500 | 3.6400 | −2.2100 | 0.6000 |
| 36 | 89.70 | 0.0100 | 0.1100 | −0.7000 | −1.9400 | 0.1000 |
| 38 | 89.01 | −0.0700 | −0.1500 | −0.5100 | −1.9600 | −0.0200 |
| 40 | 85.99 | −0.3700 | −0.9100 | −2.3700 | −2.9500 | −0.1000 |
| 42 | 83.14 | −0.2200 | −0.6200 | −2.0600 | −3.7300 | 0.0400 |
| 44 | 76.40 | −0.0900 | −0.0700 | −3.5900 | −6.0900 | 0.2500 |
| 46 | 74.59 | −0.0200 | −0.2000 | −0.1000 | −6.6500 | −0.0500 |
| 48 | 74.01 | 0.0300 | −0.0700 | 0.0600 | −6.9400 | −0.1200 |
| 50 | 75.19 | 0.1300 | 0.1700 | 0.9600 | −6.4600 | 0.0900 |
| 52 | 79.44 | 0.4500 | 0.8400 | 3.1400 | −4.7500 | 0.4300 |
| 54 | 82.01 | −0.1700 | −0.5500 | 0.5300 | −4.4400 | −0.0900 |
| 56 | 83.21 | 0.1300 | 0.2300 | 0.1200 | −3.7000 | 0.1800 |
| 58 | 88.12 | 0.1600 | 0.3100 | 3.6700 | −2.4400 | 0.5900 |
| 60 | 89.67 | 0.0100 | 0.1400 | −0.6000 | −2.1900 | 0.0700 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, T.A.; Ullah, K.; Hafeez, G.; Khan, I.; Khalid, A.; Shafiq, Z.; Usman, M.; Qazi, A.B. Closed-Loop Elastic Demand Control under Dynamic Pricing Program in Smart Microgrid Using Super Twisting Sliding Mode Controller. Sensors 2020, 20, 4376. https://doi.org/10.3390/s20164376
Khan TA, Ullah K, Hafeez G, Khan I, Khalid A, Shafiq Z, Usman M, Qazi AB. Closed-Loop Elastic Demand Control under Dynamic Pricing Program in Smart Microgrid Using Super Twisting Sliding Mode Controller. Sensors. 2020; 20(16):4376. https://doi.org/10.3390/s20164376
Chicago/Turabian StyleKhan, Taimoor Ahmad, Kalim Ullah, Ghulam Hafeez, Imran Khan, Azfar Khalid, Zeeshan Shafiq, Muhammad Usman, and Abdul Baseer Qazi. 2020. "Closed-Loop Elastic Demand Control under Dynamic Pricing Program in Smart Microgrid Using Super Twisting Sliding Mode Controller" Sensors 20, no. 16: 4376. https://doi.org/10.3390/s20164376
APA StyleKhan, T. A., Ullah, K., Hafeez, G., Khan, I., Khalid, A., Shafiq, Z., Usman, M., & Qazi, A. B. (2020). Closed-Loop Elastic Demand Control under Dynamic Pricing Program in Smart Microgrid Using Super Twisting Sliding Mode Controller. Sensors, 20(16), 4376. https://doi.org/10.3390/s20164376