The evaluation approach of the GNSS module ZED-F9P includes two aspects, namely, the positional quality and investigation of its potential for displacement detection. Firstly, static observations are carried out to analyze the reliability of GNSS data and to assess the quality of multi-frequency, low-cost instrument positioning. Secondly, controlled movements of the low-cost antenna are imposed to analyze the minimum level of displacement that may be detected with low-cost GNSS instruments.
2.4.1. Positional Quality
To evaluate the positional quality of ZED-F9P, static observations were carried out at 1 Hz for 28 h from the 31st to 34th day of the year 2020 (from 31st January until 3rd February), where data from three different navigation systems, namely, GPS, GLONASS, and Galileo, were obtained. GNSS data were processed with open-source software RTKLIB (demo5_b33b) in hourly sessions. The processing parameters used in RTKLIB are shown in
Table 1. The number of satellites was at least 15 in every session for both baselines. We initially used also Leica Infinity for processing of the GNSS data, but since it processed data from L1 frequency only and somehow ignored all L2 observations, we did not use it in further analysis.
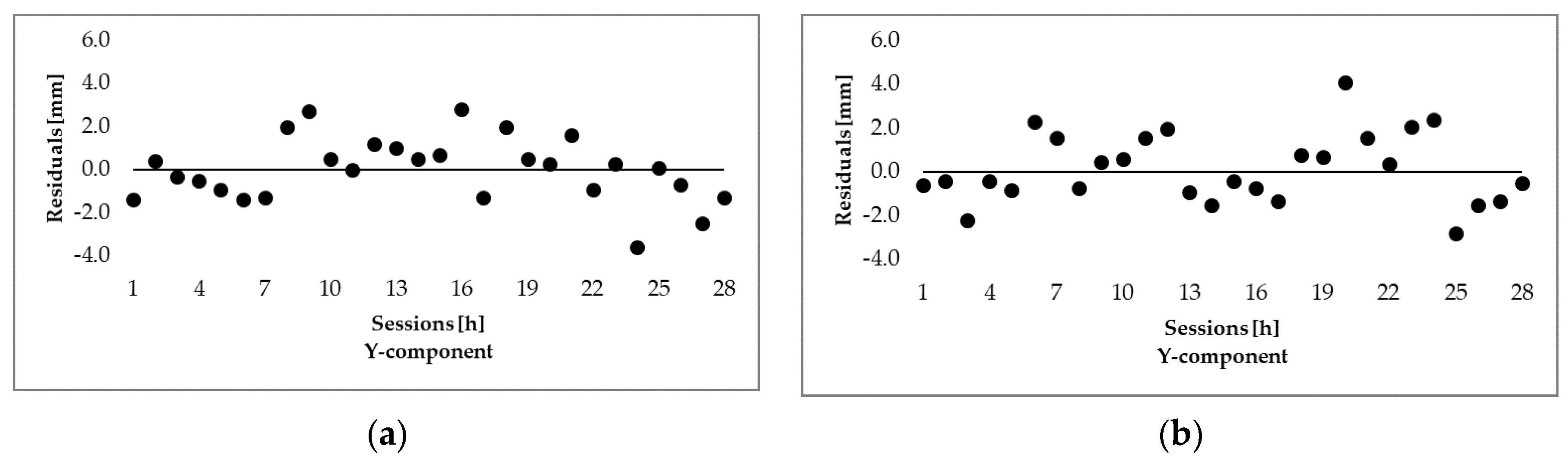
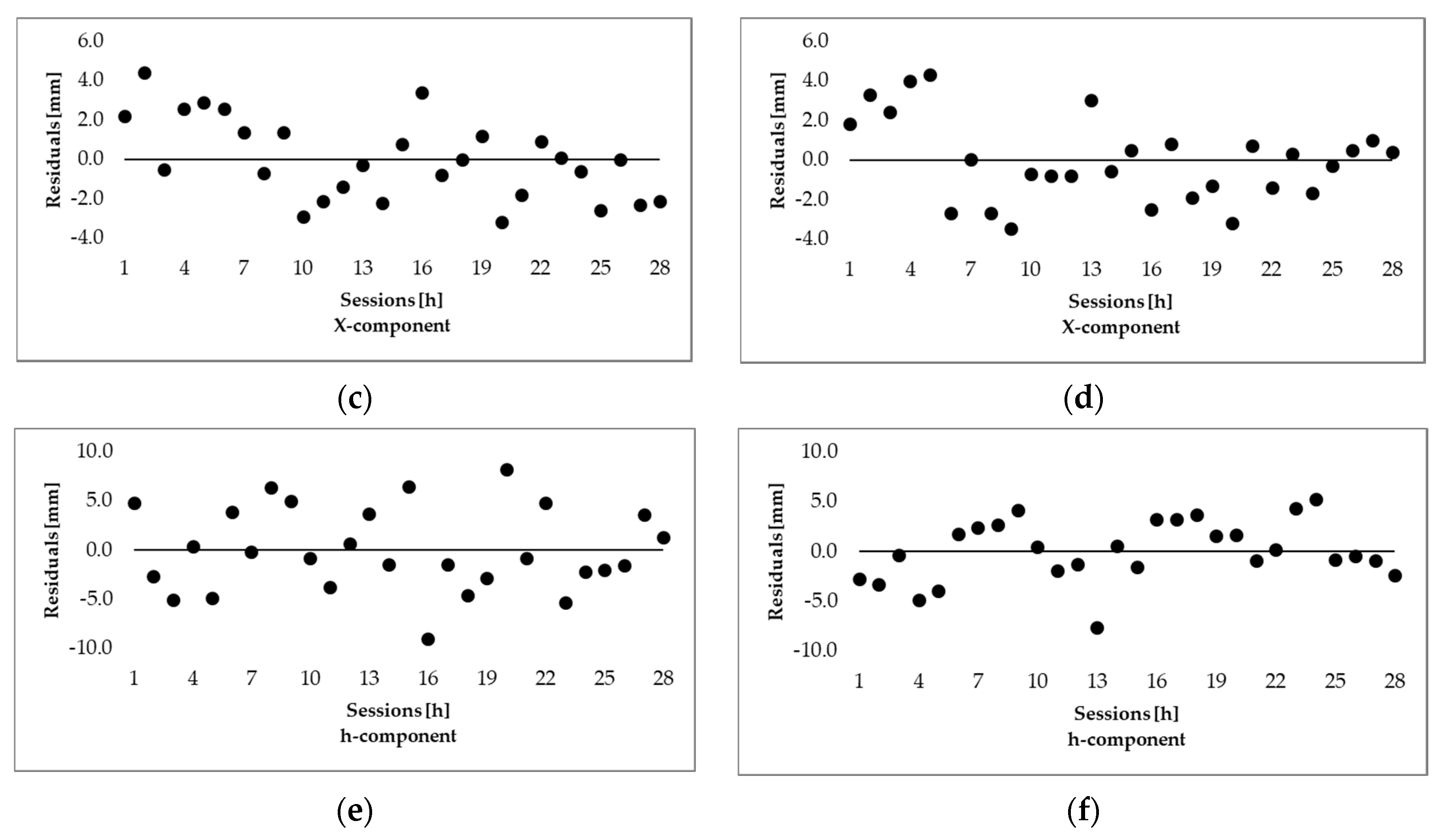
The results of GNSS data processing were estimated coordinates of the FGG1 point; for each hourly session the mean value of obtained coordinates was calculated, for both baselines, the G-baseline and the L-baseline. Baseline residuals were used to obtain some elementary statistics, such as minimum and maximum value, and Root–Mean–Square–Error (RMSE). No outliers were detected in GNSS data; all residuals were in the interval less than 3σ, where the verification was done by τ-test and Tukey’s Method [
28,
29]. Residuals were, in most cases, less than 4 mm for all coordinate components (Y—east, X—north, and h—ellipsoidal height). To better express their differences, we followed a classification adopted from Biagi et al. [
12], where five groups were defined. The first group represents all residuals in a range from 0 to 2 mm, the second from 2 to 4 mm, the third from 4 to 6 mm, the fourth from 6 to 8 mm, and the last one from 8 to 10 mm.
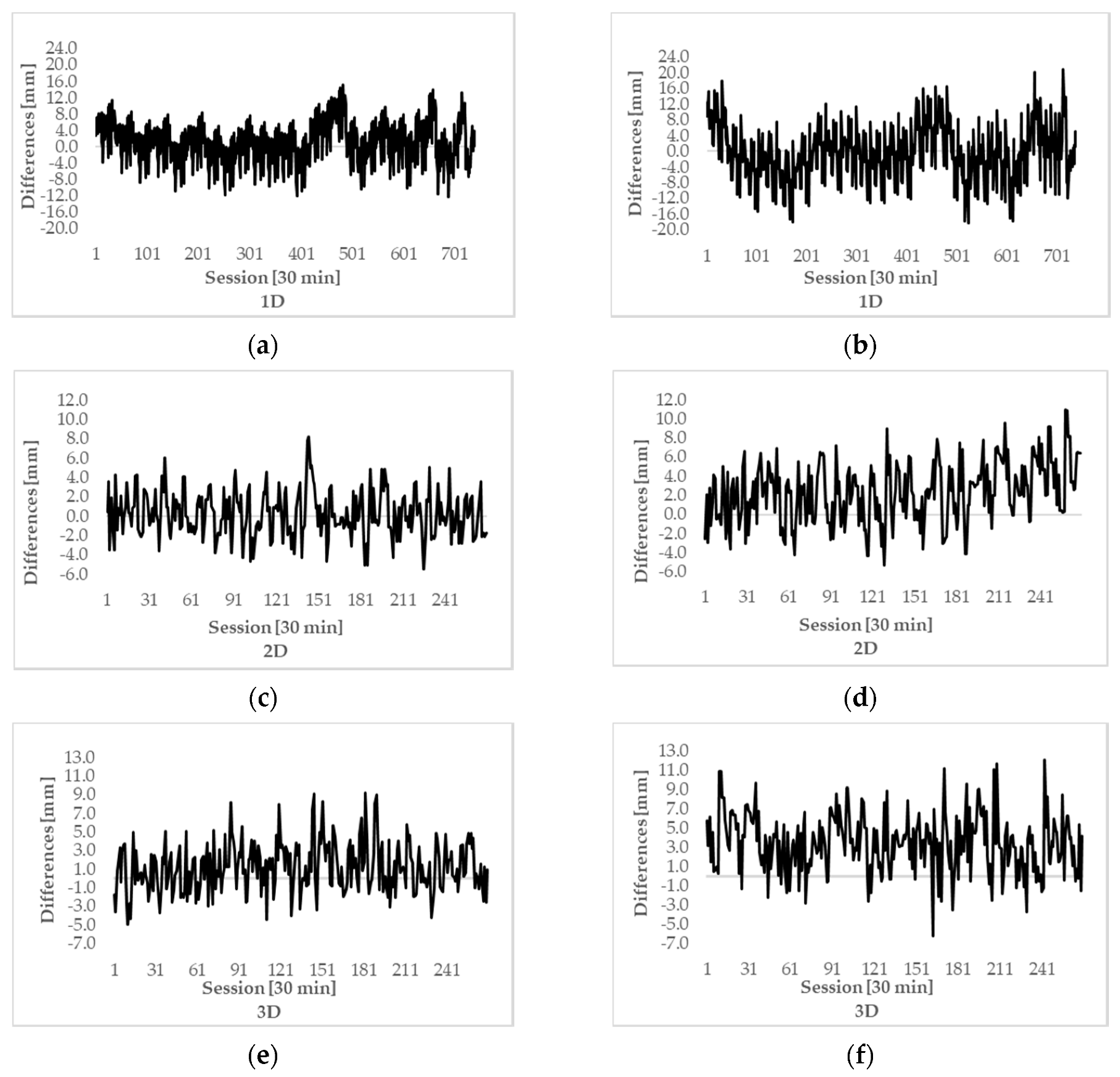
Because GNSS data from two baselines were processed, two triplets of FGG1 coordinates were obtained for each session. One set of coordinates belongs to the G-baseline, denoted as
YG,
XG, and
hG, and the other one to the L-baseline, denoted as
YL,
XL, and
hL. The differences of estimated 1D, 2D and, 3D positions from both (L- and G-) baselines are determined as
The differences in estimated coordinates from Equations (1)–(3) are mainly due to different GNSS instruments at both base stations, the geodetic GNSS receiver/antenna at FGG2 and low-cost GNSS receiver/antenna at FGG4 [
12]. To compare the performance of different GNSS instruments at both base stations, the analysis of variance (ANOVA) is applied separately for each coordinate component (
Y,
X, and
h). ANOVA is used to identify if there is a significant difference between the means of two groups, i.e., means of FGG1 coordinates obtained from both baselines [
30]. The comparison of coordinate means is done by defining the following hypotheses:
H0: The use of different types of GNSS instruments doesn’t affect coordinates;
Ha: The use of different types of GNSS instruments affects coordinates.
Results of the positional analysis are presented in the first part of
Section 3, namely, in
Section 3.1.
2.4.2. Displacement Detection
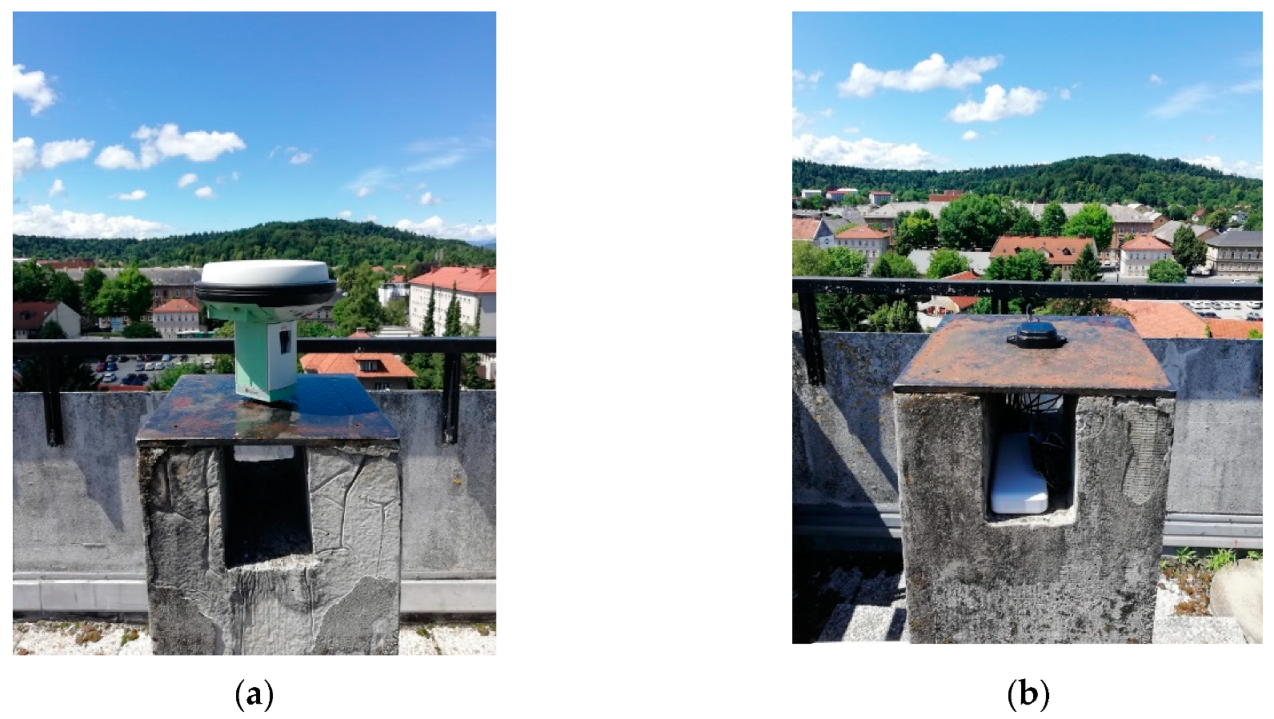
To analyze the possibility of displacement detection, a mechanical device (
Figure 4) that can impose controlled movements with sub-millimeter accuracy in the horizontal plane was used. The rover antenna was placed on a specially designed iron ground plane with a 15-cm diameter mounted on the device (
Figure 4), which has already been proved to improve the results of the survey with low-cost antennae [
20].
Measurements were performed from 52nd until 55th day of the year 2020 (from 21st February until 24th February), with sampling rate set to 1 Hz. The survey consisted of a series of 30-min sessions, where the rover was moved by 5 mm in-between two consecutive sessions. All movements were imposed in horizontal plane only. According to Günter et al. [
31], 30-min sessions can be considered as suitable for detecting displacements. The same survey was then repeated for all the following days and, as a result, 270 displacements, classified into 10 groups, were obtained. The first group represents a displacement of 5 mm, the second a displacement of 10 mm, the third of 15 mm, and so on. The last, 10th, group is represented with a displacement of 50 mm. Consecutive groups are therefore mutually different for 5 mm, from 5 up to 50 mm. This classification is done to analyze the minimum value of displacements which can be detected by using only low-cost instruments or low-cost instruments in combination with geodetic receivers on base station.
In order to determine if the displacements of the rover are significant, statistical tests are applied [
28,
32,
33,
34]. To test point stability between two different sessions, the following hypotheses are used:
H0: ; Point remained stable between two sessions;
Ha: ; Point did not remain stable between two sessions—the displacement is detected.
The test statistic that is used to verify the rejection of the null hypothesis is defined as follows [
34]
The verification of the null hypothesis is done by comparing calculated test values with the critical values. The test is dependent on the displacement dimension, i.e., for 1D, 2D, or 3D (see Equations (1)–(3)), however, the significance level of 5% (α = 0.05) was set for all cases [
34]. The displacement between two sessions, session
and session
(
), for all three dimensions (1D, 2D, and 3D) is as follows
where:
—FGG1 coordinates from the th session;
—FGG1 coordinates from the th session.
Based on the error propagation law, the variance of the considered displacements was estimated as follows [
35]
Jacobi matrices
, design matrices in case of error propagation law, are defined for 1D, 2D, and 3D displacements, respectively [
33]
Variance–covariance matrices
for all three dimensions have the following form [
33]
According to 1D test statistic from Equations (1), (9) and (12), the statistic is distributed with the standardized normal distribution. On the other hand, the 2D test statistic (Equations (2), (10) and (13)) and 3D test statistic (Equations (3), (11) and (14)) are distributed with χ
2 distribution with 2 and 3 degrees of freedom [
34].
Since the imposed displacements of the rover antenna were in the horizontal plane only, we expect the test statistic for all 1D displacement to be smaller than its critical value. To test if the ellipsoidal height has changed between two sessions, the following hypotheses are set:
H0: ; Point didn’t move vertically between two sessions;
Ha: ; Point moved vertically between two sessions—the vertical displacement is detected.
Rejection of the null hypothesis is verified based on the test statistic and critical value (
tcritical = 1.96) determined from standardized normal distribution [
34]. The null hypothesis was tested 720 times in total, for all possible pairs of sessions. The number of tests is much higher for 1D compared to both of the following cases (2D and 3D tests) because observations from positional quality assessment surveys (data from
Section 2.4.1) were also used.
The horizontal coordinates of point FGG1 were also tested in order to detect horizontal displacement. During the survey, 270 possible displacements were imposed, which ranged from 5 to 50 mm. Differences between sessions of two identical positions were not tested. In this case, we are testing only differences that correspond to truly imposed displacements and may, therefore, determine the minimum level of the displacement for low-cost GNSS instruments. The following hypothesis are set:
H0: ; Point didn’t move horizontally between two sessions;
Ha: ; Point moved horizontally between session—the horizontal displacement is detected.
Verification of rejection of the null hypothesis is done by comparing test statistics with the critical value (tcritical = 2.45), determined from χ2 distribution with two degrees of freedom. The final critical value is determined as a square root of theoretical χ2 critical value.
In reality, the displacements of points are expected to be spatial (in 3D) in any direction. In this case, for 3D displacements, the following hypotheses are set:
H0: ; Point did not move spatially between two sessions;
Ha: 0; Point moved spatially between two sessions—the spatial displacement is detected.
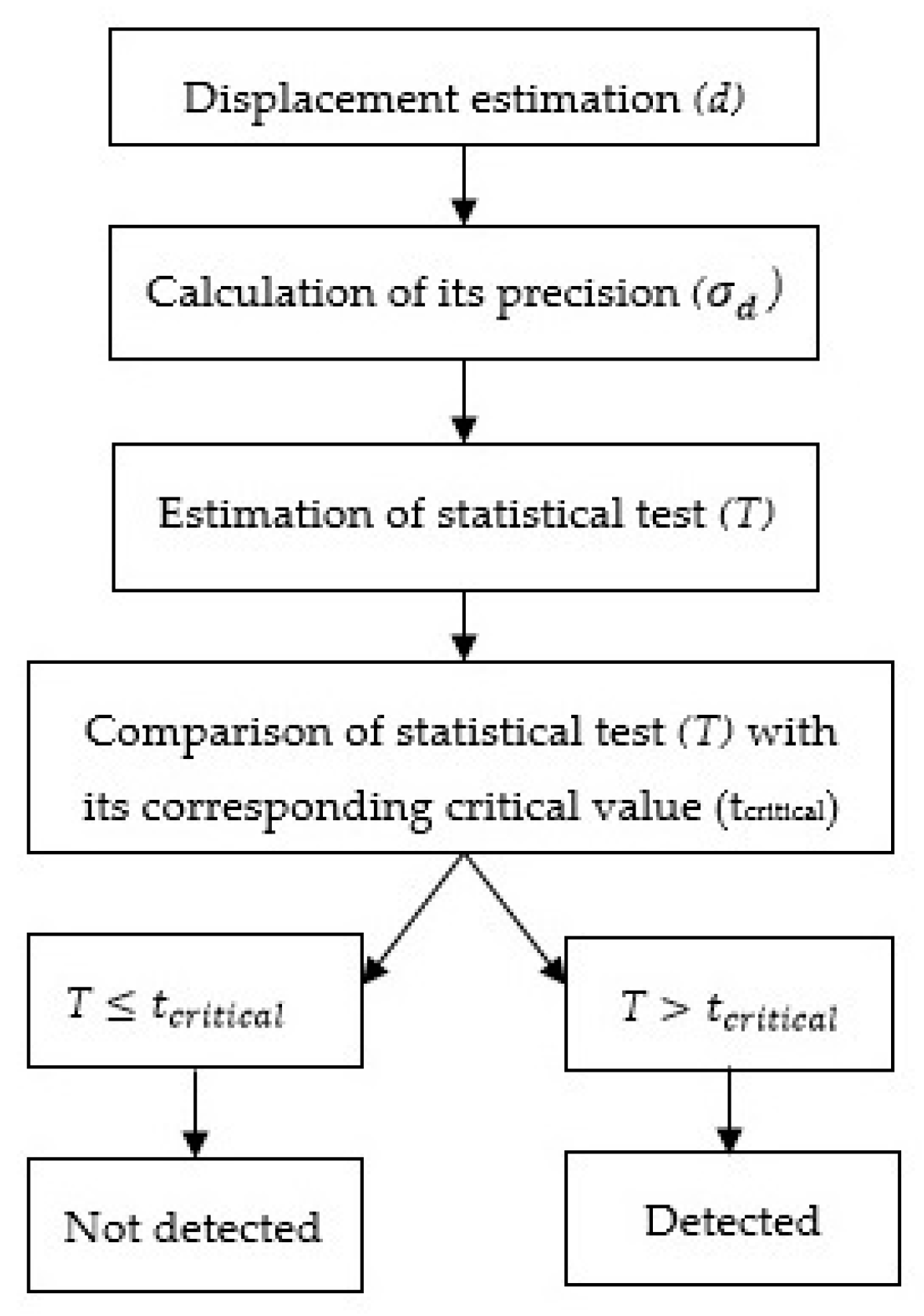
As in the case of 2D, 270 movements were imposed in total, where the defined critical value (
tcritical = 2.80) is used to verify the rejection of tested hypotheses. This was again obtained from χ
2 distribution with three degrees of freedom (and again a square root value). The procedure of displacements’ detection is shown graphically in
Figure 5.
A mechanical device that imposes displacements provides them with sub-millimeter accuracy, and therefore true values of all displacements are known. In the horizontal plane, the displacements are in steps of 5 mm, from 0 to 50 mm, whereas in vertical directions there are truly no displacements, all their values are equal to 0 mm. For all estimated displacements (1D, 2D, and 3D), we also estimated Mean Absolute Error (MAE). In this way, important information will be acquired, namely, the level of accuracy of estimated displacements with respect to their true values that may be achieved with low-cost GNSS receivers. The MAE values will be determined for both baselines, for the G-baseline as well as for the L-baseline. The results are presented in the second part of the following
Section 3.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}