Development of Synchronized High-Sensitivity Wireless Accelerometer for Structural Health Monitoring

 ,
, 
 ,
,
Abstract
1. Introduction
2. Synchronized Sensing Framework for High-Sensitivity Accelerometer
2.1. Xnode
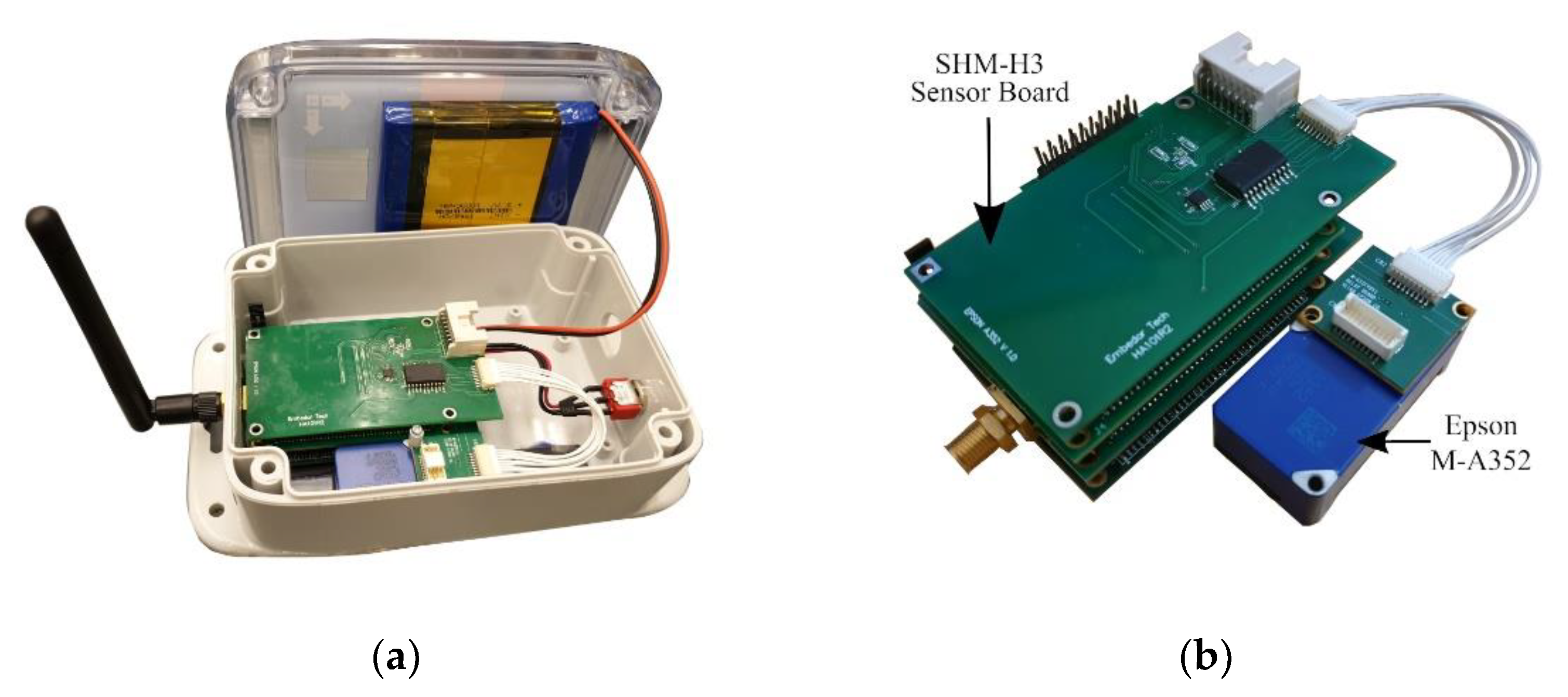
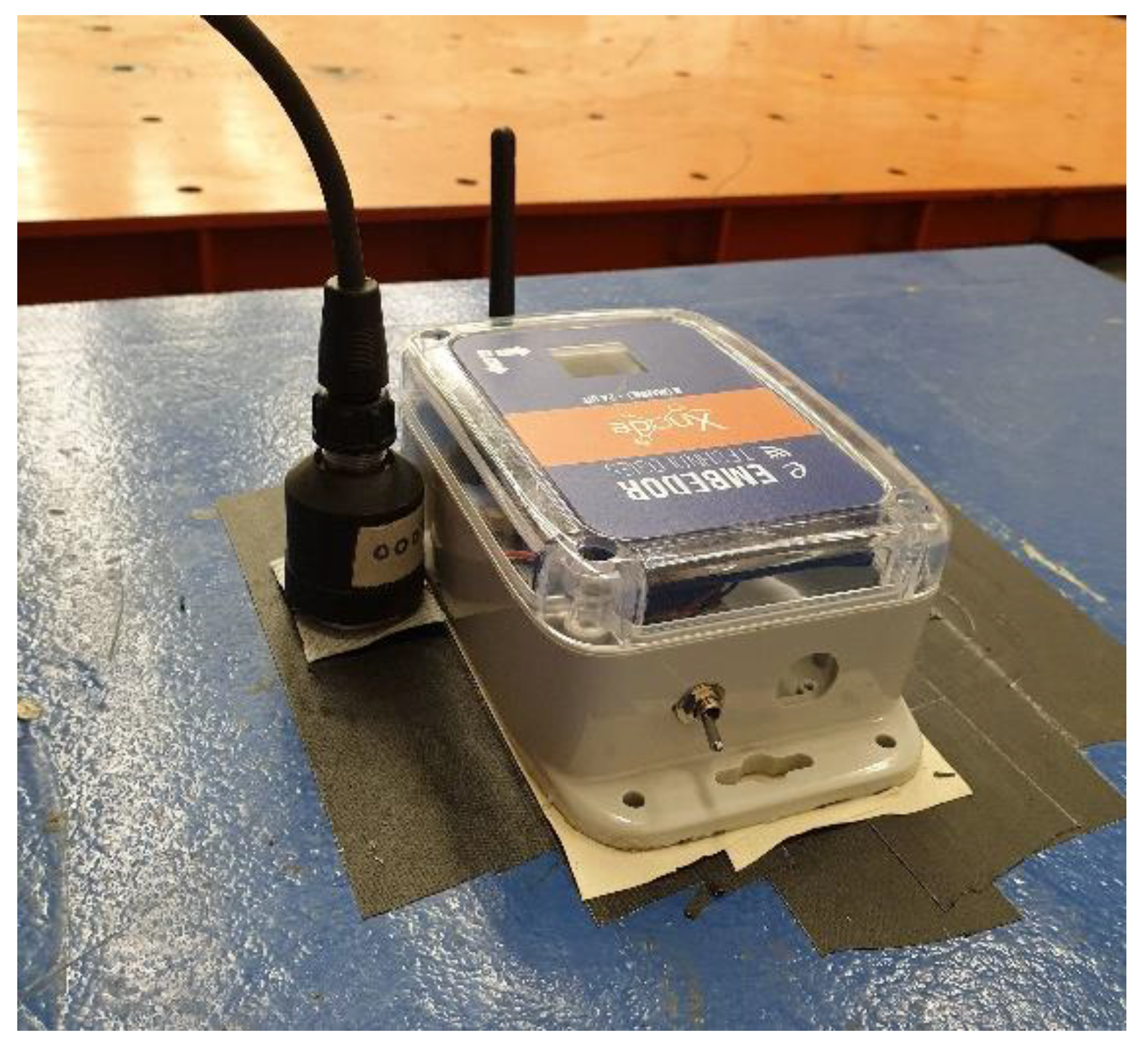
2.2. Integration of Digital Accelerometer and Xnode
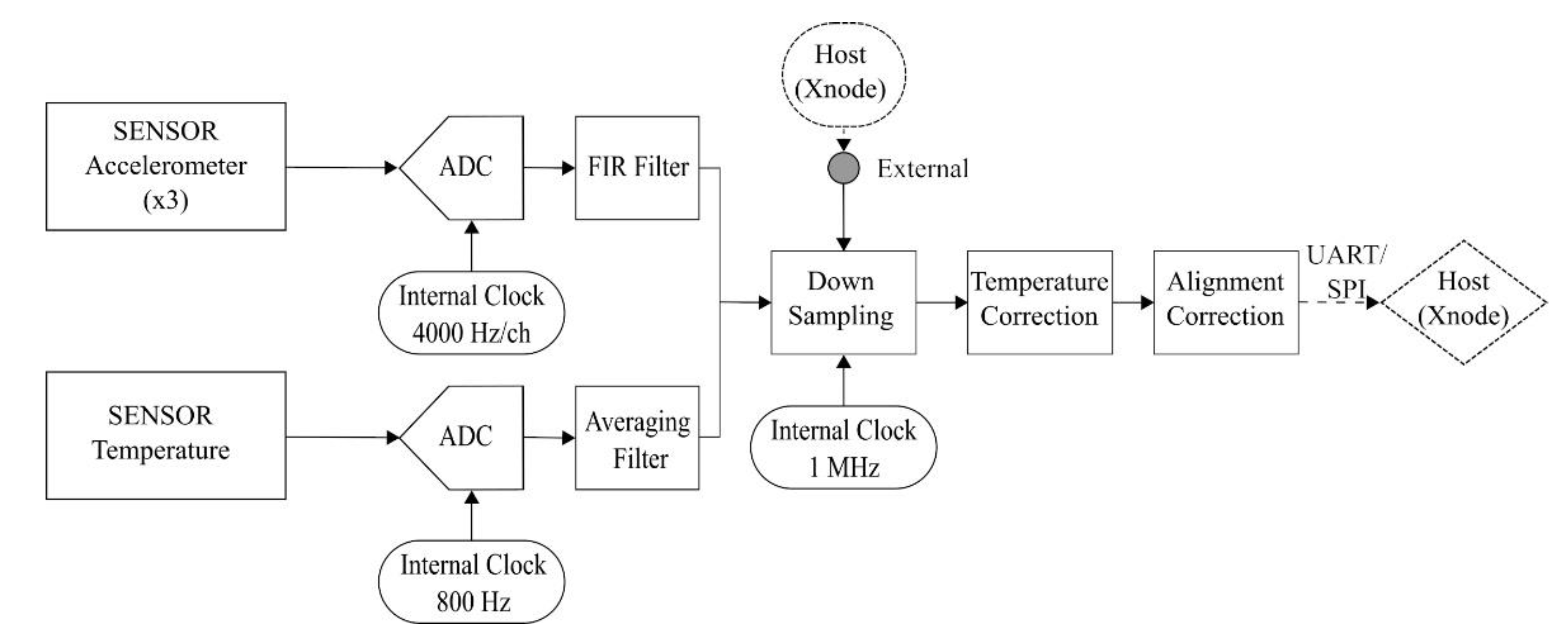
2.2.1. Hardware Support
2.2.2. Driver Support
3. Time Synchronization with Digital Accelerometers
3.1. Challenges with Digital Accelerometers
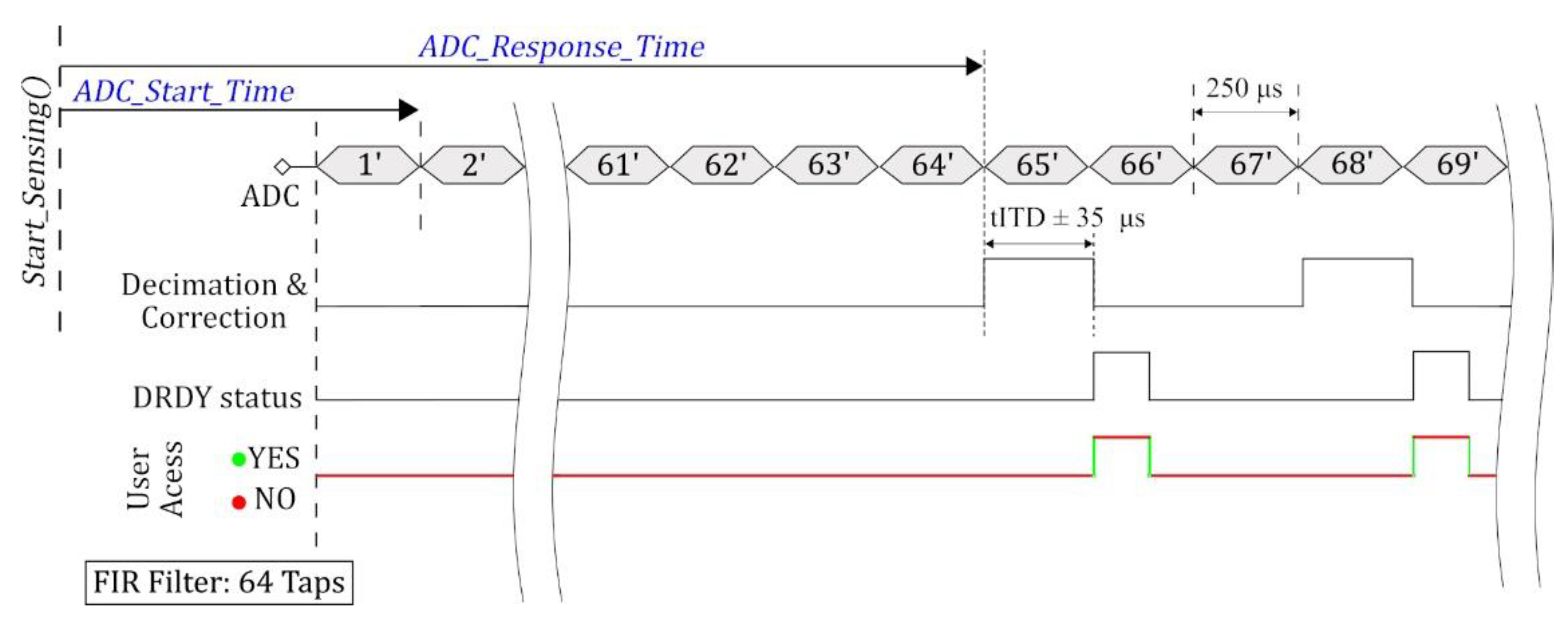
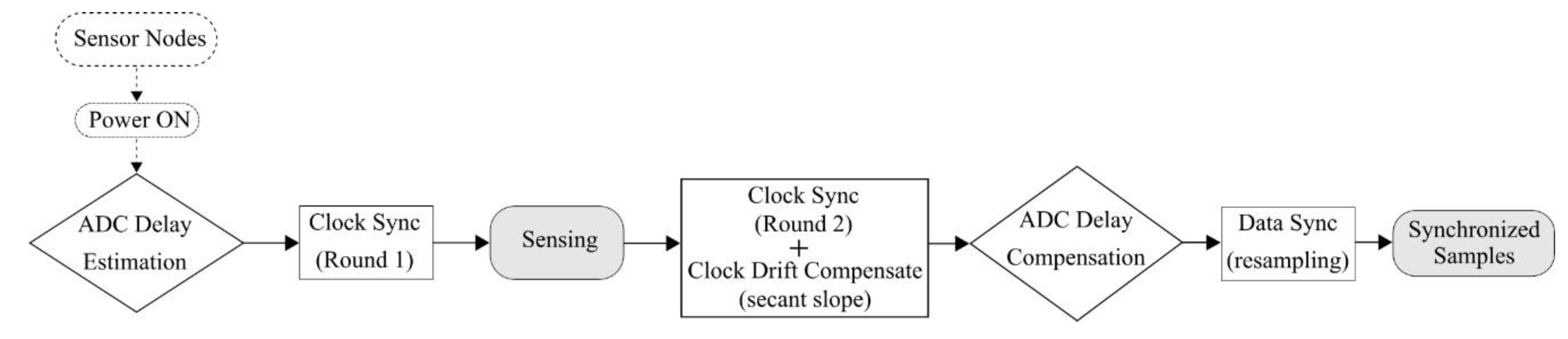
3.2. Adaptive Algorithm for ADC Startup Delay Estimation in WSSs
3.3. Synchronized Sensing Strategy Implementation
4. Experimental Validation
4.1. Ambient Vibration Tests
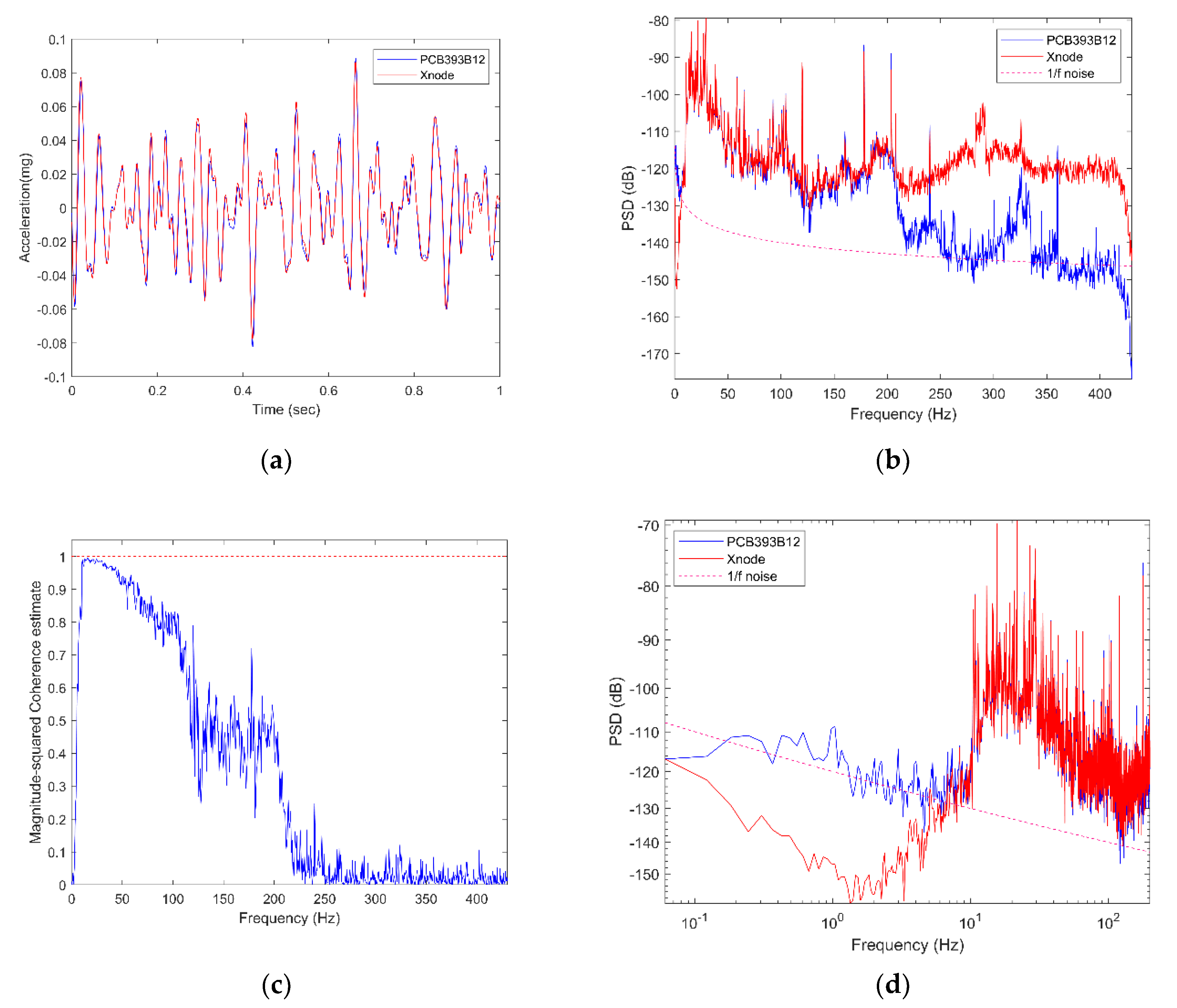
4.1.1. Low Amplitude Vibration Laboratory Test
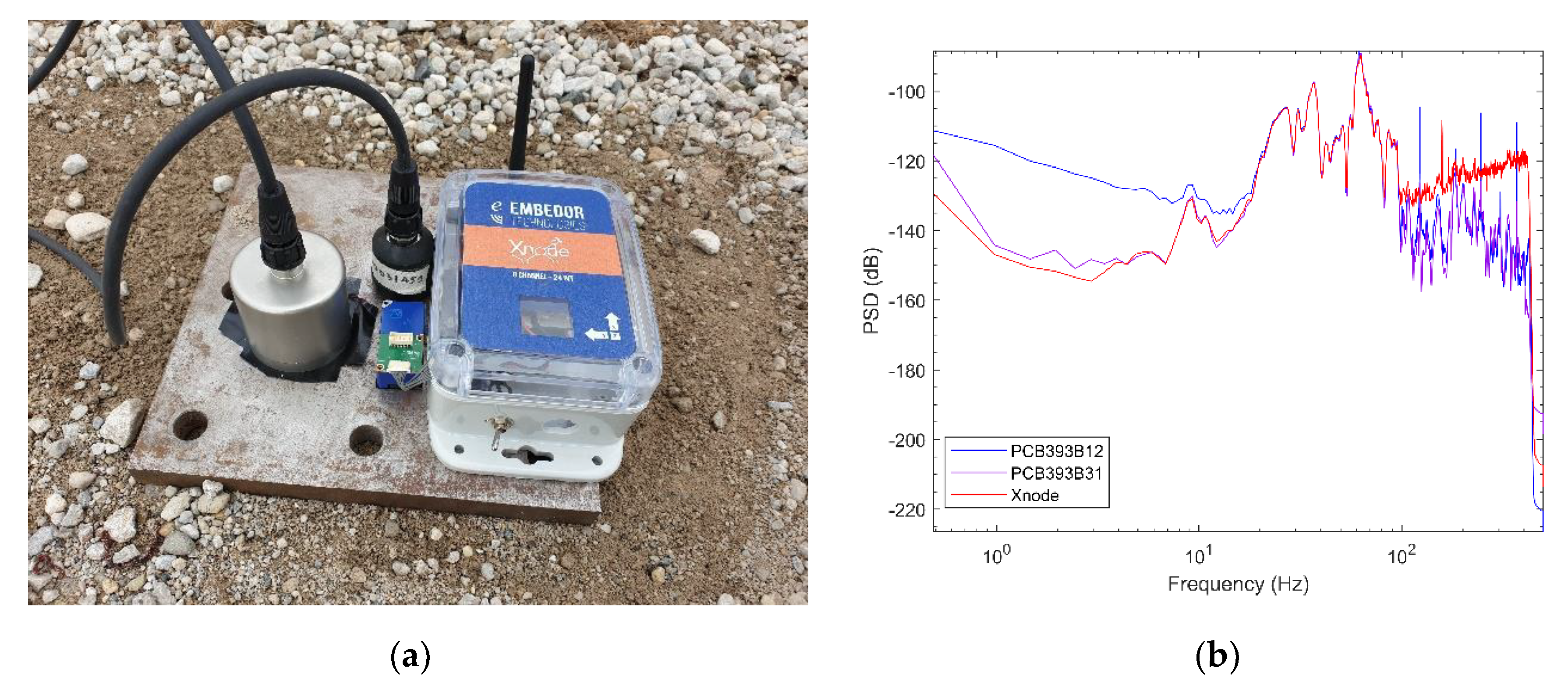
4.1.2. Ultra-Low Amplitude Vibration Field Test
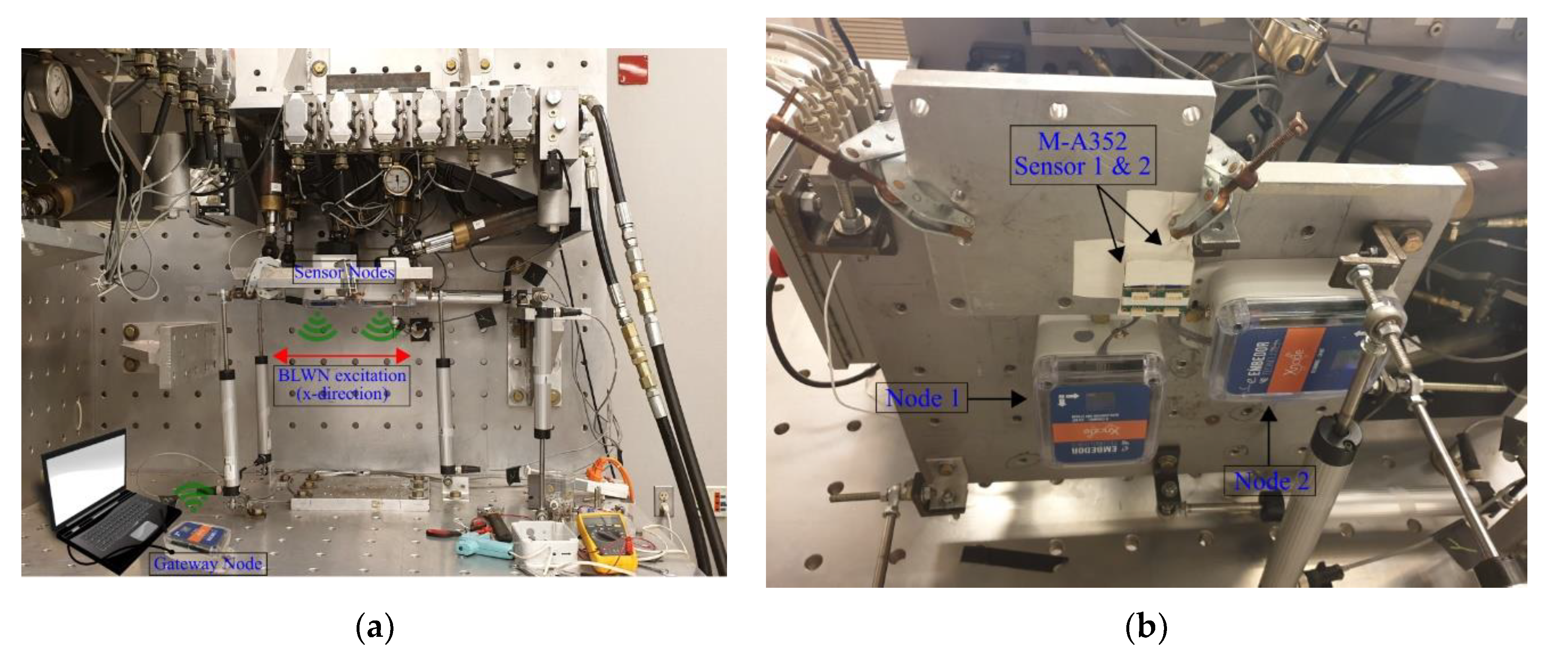
4.2. Synchronization Tests
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Collapse of Xinjia Express Hotel. Available online: https://en.wikipedia.org/wiki/Collapse_of_Xinjia_Express_Hotel (accessed on 30 May 2020).
- Florida International University Pedestrian Bridge Collapse. Available online: https://en.wikipedia.org/wiki/Florida_International_University_pedestrian_bridge_collapse (accessed on 30 May 2020).
- Çelebi, M. Real-time seismic monitoring of the New Cape Girardeau Bridge and preliminary analyses of recorded data: An overview. Earthq. Spectra 2006, 22, 609–630. [Google Scholar] [CrossRef]
- Zhu, L.; Fu, Y.; Chow, R.; Spencer, B.F.; Park, J.W.; Mechitov, K. Development of a high-sensitivity wireless accelerometer for structural health monitoring. Sensors 2018, 18, 262. [Google Scholar] [CrossRef] [PubMed]
- Ragam, P.; Sahebraoji, N.D. Application of MEMS-based accelerometer wireless sensor systems for monitoring of blast-induced ground vibration and structural health: A review. IET Wirel. Sens. Syst. 2019, 9, 103–109. [Google Scholar] [CrossRef]
- Wondra, B.; Malek, S.; Botz, M.; Glaser, S.D.; Grosse, C.U. Wireless High-Resolution Acceleration Measurements for Structural Health Monitoring of Wind Turbine Towers. Data-Enabled Discov. Appl. 2019, 3, 4. [Google Scholar] [CrossRef]
- Darbre, G.R.; Proulx, J. Continuous ambient-vibration monitoring of the arch dam of Mauvoisin. Earthq. Eng. Struct. Dyn. 2002, 31, 475–480. [Google Scholar] [CrossRef]
- Muttillo, M.; Battista, L.D.; de Rubeis, T.; Nardi, I. Structural health continuous monitoring of buildings—A modal parameters identification system. In Proceedings of the 2019 4th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 18–21 June 2019; pp. 1–4. [Google Scholar]
- Valenti, S.; Conti, M.; Pierleoni, P.; Zappelli, L.; Belli, A.; Gara, F.; Carbonari, S.; Regni, M. A low cost wireless sensor node for building monitoring. In Proceedings of the 2018 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Salerno, Italy, 21–22 June 2018; pp. 1–6. [Google Scholar]
- Li, J.; Mechitov, K.A.; Kim, R.E.; Spencer, B.F., Jr. Efficient time synchronization for structural health monitoring using wireless smart sensor networks. Struct. Control Health Monit. 2016, 23, 470–486. [Google Scholar] [CrossRef]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The flooding time synchronization protocol. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems; Association for Computing Machinery: Baltimore, MD, USA, 2004; pp. 39–49. [Google Scholar]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Nagayama, T.; Spencer, B.F., Jr. Structural Health Monitoring Using Smart Sensors; Newmark Structural Engineering Laboratory, University of Illinois at Urbana: Urbana, IL, USA, 2007. [Google Scholar]
- Rice, J.A.; Spencer, B.F., Jr. Structural health monitoring sensor development for the Imote2 platform. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2008; International Society for Optics and Photonics: San Diego, CA, USA, 2008; Volume 6932, p. 693234. [Google Scholar]
- Rice, J.A.; Spencer, B.F., Jr. Flexible Smart Sensor Framework for Autonomous Full-Scale Structural Health Monitoring; Newmark Structural Engineering Laboratory, University of Illinois at Urbana: Urbana, IL, USA, 2009. [Google Scholar]
- Shi, F.; Tuo, X.; Yang, S.X.; Li, H.; Shi, R. Multiple Two-Way Time Message Exchange (TTME) Time Synchronization for Bridge Monitoring Wireless Sensor Networks. Sensors 2017, 17, 1027. [Google Scholar] [CrossRef] [PubMed]
- Pakzad, S.N.; Fenves, G.L.; Kim, S.; Culler, D.E. Design and implementation of scalable wireless sensor network for structural monitoring. J. Infrastruct. Syst. 2008, 14, 89–101. [Google Scholar] [CrossRef]
- Jang, S.; Jo, H.; Cho, S.; Mechitov, K.; Rice, J.A.; Sim, S.-H.; Jung, H.-J.; Yun, C.-B.; Spencer, B.F., Jr.; Agha, G. Structural health monitoring of a cable-stayed bridge using smart sensor technology: Deployment and evaluation. Smart Struct. Syst. 2010, 6, 439–459. [Google Scholar] [CrossRef]
- Abdulkarem, M.; Samsudin, K.; Rokhani, F.Z.; A Rasid, M.F. Wireless sensor network for structural health monitoring: A contemporary review of technologies, challenges, and future direction. Struct. Health Monit. 2020, 19, 693–735. [Google Scholar] [CrossRef]
- Kane, M.; Zhu, D.; Hirose, M.; Dong, X.; Winter, B.; Häckell, M.; Lynch, J.P.; Wang, Y.; Swartz, A. Development of an extensible dual-core wireless sensing node for cyber-physical systems. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2014; International Society for Optics and Photonics: San Diego, CA, USA, 2014; Volume 9061, p. 90611U. [Google Scholar]
- Nagayama, T.; Sim, S.-H.; Miyamori, Y.; Spencer, B.F., Jr. Issues in structural health monitoring employing smart sensors. Smart Struct. Syst. 2007, 3, 299–320. [Google Scholar] [CrossRef]
- Fu, Y. Sudden-Event Monitoring of Civil Infrastructure Using Wireless Smart Sensors. Ph.D. Thesis, University of Illinois at Urbana-Champaign, Urbana, IL, USA, 2019. [Google Scholar]
- Nagayama, T.; Abe, M.; Fujino, Y.; Ikeda, K. Structural Identification of a Nonproportionally Damped System and Its Application to a Full-Scale Suspension Bridge. J. Struct. Eng. 2005, 131, 1536–1545. [Google Scholar] [CrossRef]
- Krishnamurthy, V.; Fowler, K.; Sazonov, E. The effect of time synchronization of wireless sensors on the modal analysis of structures. Smart Mater. Struct. 2008, 17, 055018. [Google Scholar] [CrossRef]
- Narayanan, S. Synchronization of Wireless Accelerometer Sensors for Industrial Application. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Devices, A. Low Noise Low Drift Low Power 3-Axis MEMS Accelerometers ADXL354/ADXL355. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adxl354_355.pdf (accessed on 30 May 2020).
- Bocca, M.; Eriksson, L.M.; Mahmood, A.; Jäntti, R.; Kullaa, J. A Synchronized Wireless Sensor Network for Experimental Modal Analysis in Structural Health Monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2011, 26, 483–499. [Google Scholar] [CrossRef]
- Navabian, N.; Beskhyroun, S. An Automated Wireless-Based System for Real-Time Health Monitoring of Civil Infrastructures. In Proceedings of the 2020 New Zealand Society for Earthquake Engineering Annual Technical Conference, Wellington, New Zealand, 22–24 April 2020. [Google Scholar]
- Fu, Y.; Mechitov, K.; Hoang, T.; Kim, J.R.; Lee, D.H.; Spencer, B.F., Jr. Development and full-scale validation of high-fidelity data acquisition on a next-generation wireless smart sensor platform. Adv. Struct. Eng. 2019, 22, 3512–3533. [Google Scholar] [CrossRef]
- Fu, Y.; Zhu, L.; Hoang, T.; Mechitov, K.; Spencer, B.F., Jr. Demand-based wireless smart sensors for earthquake monitoring of civil infrastructure. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2018; International Society for Optics and Photonics: Denver, CO, USA, 2018; Volume 10598, p. 105980Z. [Google Scholar]
- Fu, Y.; Hoang, T.; Mechitov, K.; Kim, J.R.; Zhang, D.; Spencer, B.F. Sudden Event Monitoring of Civil Infrastructure Using Demand-Based Wireless Smart Sensors. Sensors 2018, 18, 4480. [Google Scholar] [CrossRef] [PubMed]
- Rice, J.A.; Mechitov, K.; Sim, S.-H.; Nagayama, T.; Jang, S.; Kim, R.; Spencer, B.F., Jr.; Agha, G.; Fujino, Y. Flexible smart sensor framework for autonomous structural health monitoring. Smart Struct. Syst. 2010, 6, 423–438. [Google Scholar] [CrossRef]
- Moreu, F.; Kim, R.E.; Spencer, B.F., Jr. Railroad bridge monitoring using wireless smart sensors. Struct. Control Health Monit. 2017, 24, e1863. [Google Scholar] [CrossRef]
- Giant Observation Wheel under Construction in Dubai. Available online: http://www.tesolution.com/structural-health-monitoring.html (accessed on 28 May 2020).
- Engineering Secrets of the World’s Tallest Observation Wheel Ain Dubai Revealed in New Documentary. Available online: https://www.thenational.ae/arts-culture/television/engineering-secrets-of-the-world-s-tallest-observation-wheel-ain-dubai-revealed-in-new-documentary-1.967435 (accessed on 28 May 2020).
- Fu, Y.G.; Mechitov, K.A.; Hoskere, V.; Spencer, B.F. Development of RTOS-based wireless SHM system: Benefits in applications. In Proceedings of the International Conference on Smart Infrastructure and Construction 2016; ICE Publishing: London, UK, 2016; pp. 149–154. [Google Scholar]
- M-A352AD10 ES Data Sheet Rev.20190531; Seiko Epson Corporation: San Jose, CA, USA, 2019.
- M-A351S/M-A351AU Data Sheet Rev1.0.; Seiko Epson Corporation: San Jose, CA, USA, 2016.
- Barsocchi, P.; Bartoli, G.; Betti, M.; Girardi, M.; Mammolito, S.; Pellegrini, D.; Zini, G. Wireless sensor networks for continuous structural health monitoring of historic masonry towers. Int. J. Archit. Herit. 2020, 00, 1–23. [Google Scholar] [CrossRef]
- Beavers, I. Demystifying Deterministic Latency within JESD204B Converters; Analog Devices Inc. MS-2626: Norwood, MA, USA, 2013. [Google Scholar]
- Reeder, R. Compare Aperture Delay between ADCs; Analog Devices Inc.: Norwood, MA, USA, 2002. [Google Scholar]
- MEMS Digital Output Motion Sensor: Ultra-Low-Power High-Performance 3-axis “femto” Accelerometer; STMicroelectronics: Geneva, Switzerland, 2017.
- Pachchigar, M. Increase Dynamic Range of SAR ADCs Using Oversampling; Analog Devices Inc.: Norwood, MA, USA, 2015. [Google Scholar]
- Contadini, F. Oversampling with averaging to increase ADC resolution. Available online: https://www.embedded.com/oversampling-with-averaging-to-increase-adc-resolution/.php (accessed on 31 May 2020).
- Adler, R.; Flanigan, M.; Huang, J.; Kling, R.; Kushalnagar, N.; Nachman, L.; Wan, C.-Y.; Yarvis, M. Intel mote 2: An advanced platform for demanding sensor network applications. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA, 2–4 November 2005; p. 298. [Google Scholar]
- Łuczak, S.; Zams, M.; Bagiński, K. Selected Aging Effects in Triaxial MEMS Accelerometers. Available online: https://www.hindawi.com/journals/js/2019/5184907/ (accessed on 15 June 2020).
- Steve Smith An Interesting Fourier Transform–1/f Noise. Available online: https://www.dsprelated.com/showarticle/40.php (accessed on 31 May 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Year | Error | |
|---|---|---|---|
| Clock Synchronization 1 | Data Synchronization | ||
| Bocca et al. [27] | 2011 | ~10 µs | - |
| Valenti et al. [9] | 2018 | - | ~6 ms |
| Narayanan [25] | 2019 | - | ~50 µs 2 |
| Navabian and Beskhyroun [28] | 2020 | - | 2 ms |
| Feature | M-A351 | M-A352 |
|---|---|---|
| Custom Programmable FIR filters | No | Yes |
| Sleep mode (1.1 mA usage) | No | Yes |
| Max sampling rate | 500 Hz | 1000 Hz |
| Frequency bandwidth | 100 Hz | 400 Hz |
| Shock resistance | 300 g | 1200 g |
| Power-on to Start-up time | 2 s | 900 ms |
| Output dynamic range | ± 5 g | ± 15 g |
| Supply current (Avg.) | 20 mA | 13.2 mA |
| Noise (Avg.) | 0.5 | 0.2 |
| FIR Filter Taps | ADC_Start_Time (µs) | Error (µs) |
|---|---|---|
| 64 | 2937.35 | 2.35 |
| 128 | 3202.33 | 1.33 |
| 512 | 4787.31 | 4.31 |
| Sensing Duration | Synchronization Error (µs) | ||||
|---|---|---|---|---|---|
| Trial 1 | Trial 2 | Trial 3 | Average | Average without Compensation 1 | |
| 1 min | 6.12 | 9.76 | 7.98 | 7.95 | 80.44 |
| 15 min | 12.47 | 13.47 | 11.52 | 12.49 | 111.3 |
| 30 min | 17.26 | 11.23 | 14.32 | 14.27 | 135.87 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Veluthedath Shajihan, S.A.; Chow, R.; Mechitov, K.; Fu, Y.; Hoang, T.; Spencer, B.F. Development of Synchronized High-Sensitivity Wireless Accelerometer for Structural Health Monitoring. Sensors 2020, 20, 4169. https://doi.org/10.3390/s20154169
Veluthedath Shajihan SA, Chow R, Mechitov K, Fu Y, Hoang T, Spencer BF. Development of Synchronized High-Sensitivity Wireless Accelerometer for Structural Health Monitoring. Sensors. 2020; 20(15):4169. https://doi.org/10.3390/s20154169
Chicago/Turabian StyleVeluthedath Shajihan, Shaik Althaf, Raymond Chow, Kirill Mechitov, Yuguang Fu, Tu Hoang, and Billie F. Spencer. 2020. "Development of Synchronized High-Sensitivity Wireless Accelerometer for Structural Health Monitoring" Sensors 20, no. 15: 4169. https://doi.org/10.3390/s20154169
APA StyleVeluthedath Shajihan, S. A., Chow, R., Mechitov, K., Fu, Y., Hoang, T., & Spencer, B. F. (2020). Development of Synchronized High-Sensitivity Wireless Accelerometer for Structural Health Monitoring. Sensors, 20(15), 4169. https://doi.org/10.3390/s20154169