A Portable Fuzzy Driver Drowsiness Estimation System



Abstract
1. Introduction
2. Materials and Methods
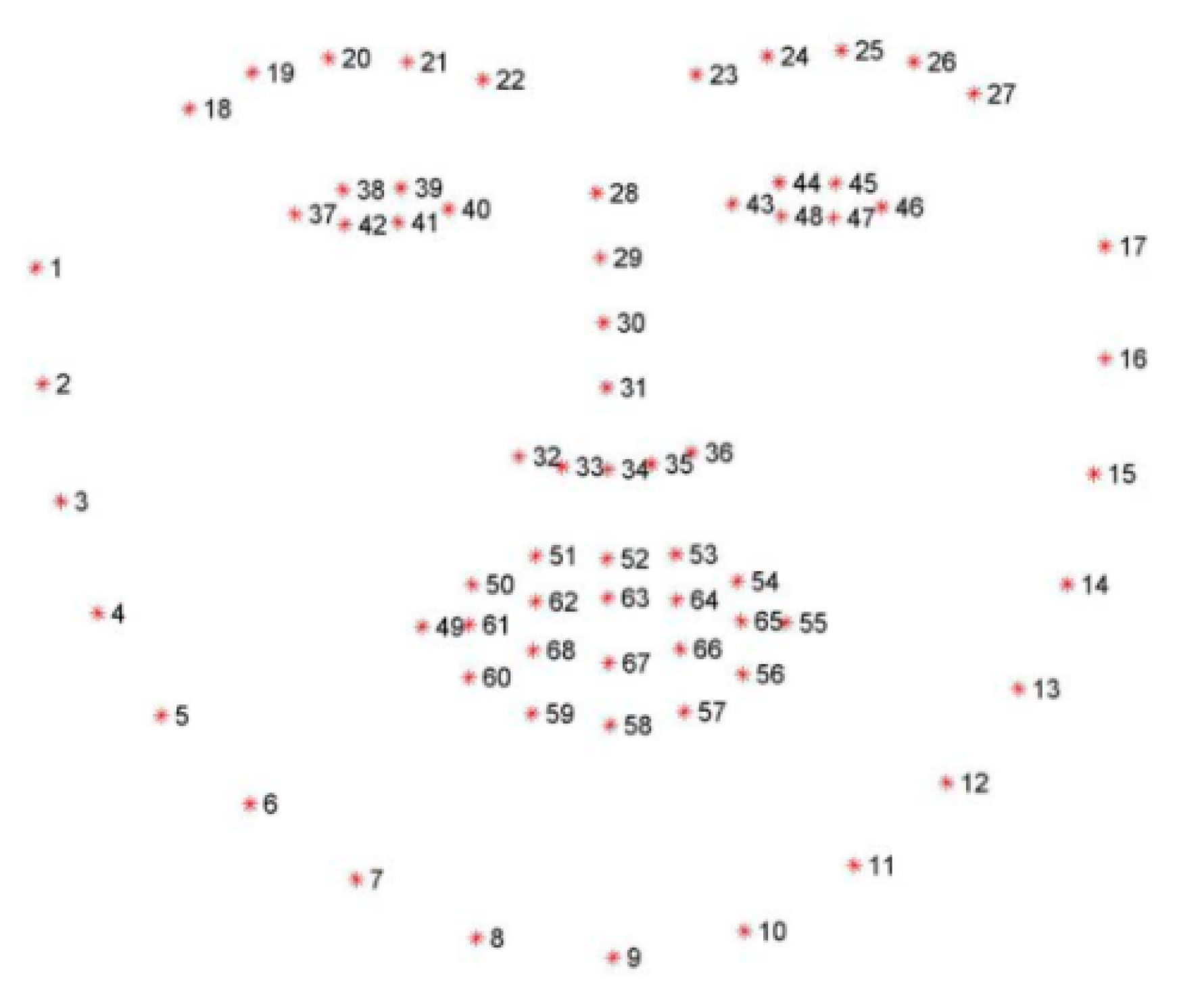
2.1. Face Detection
2.2. Facial Features State Determination
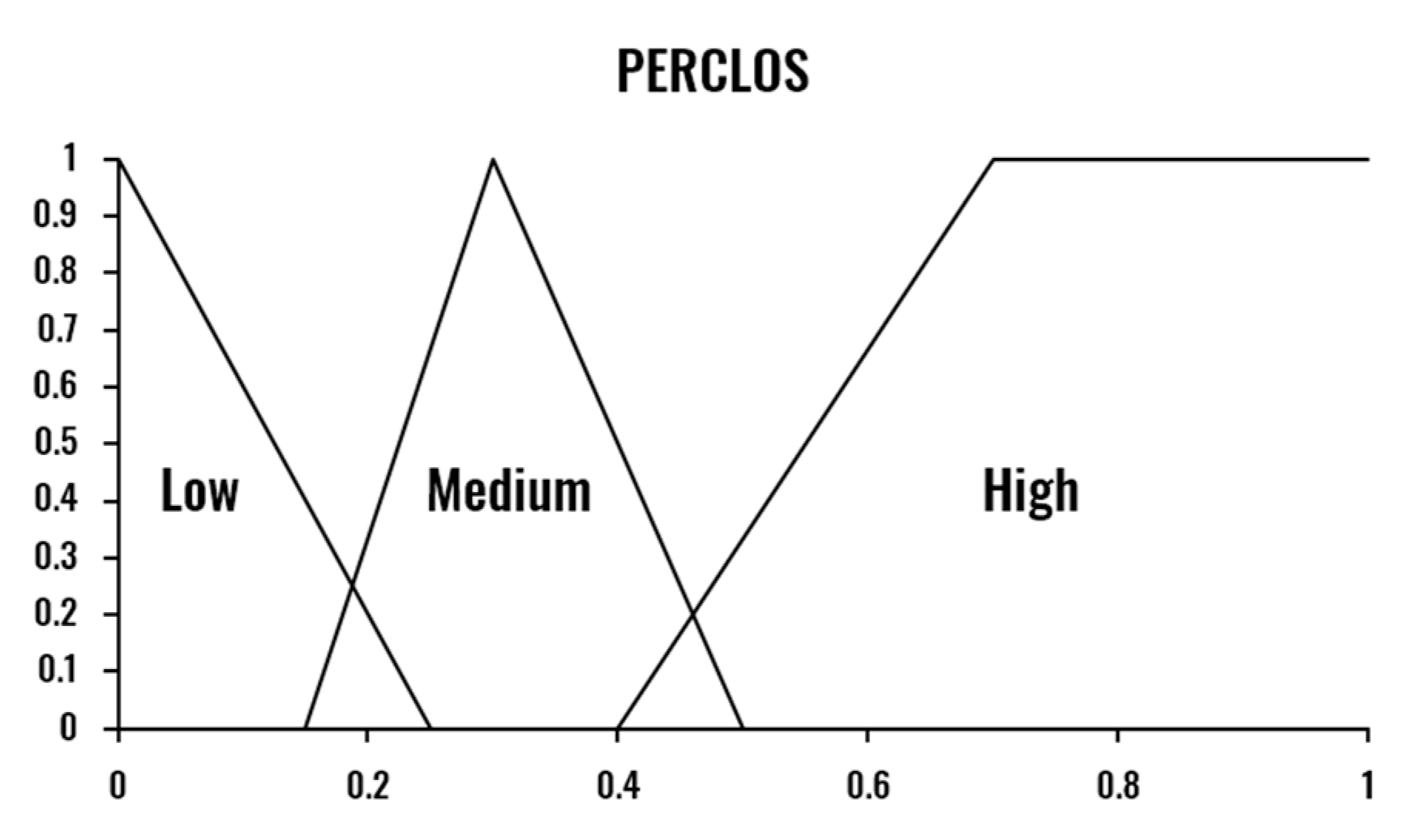
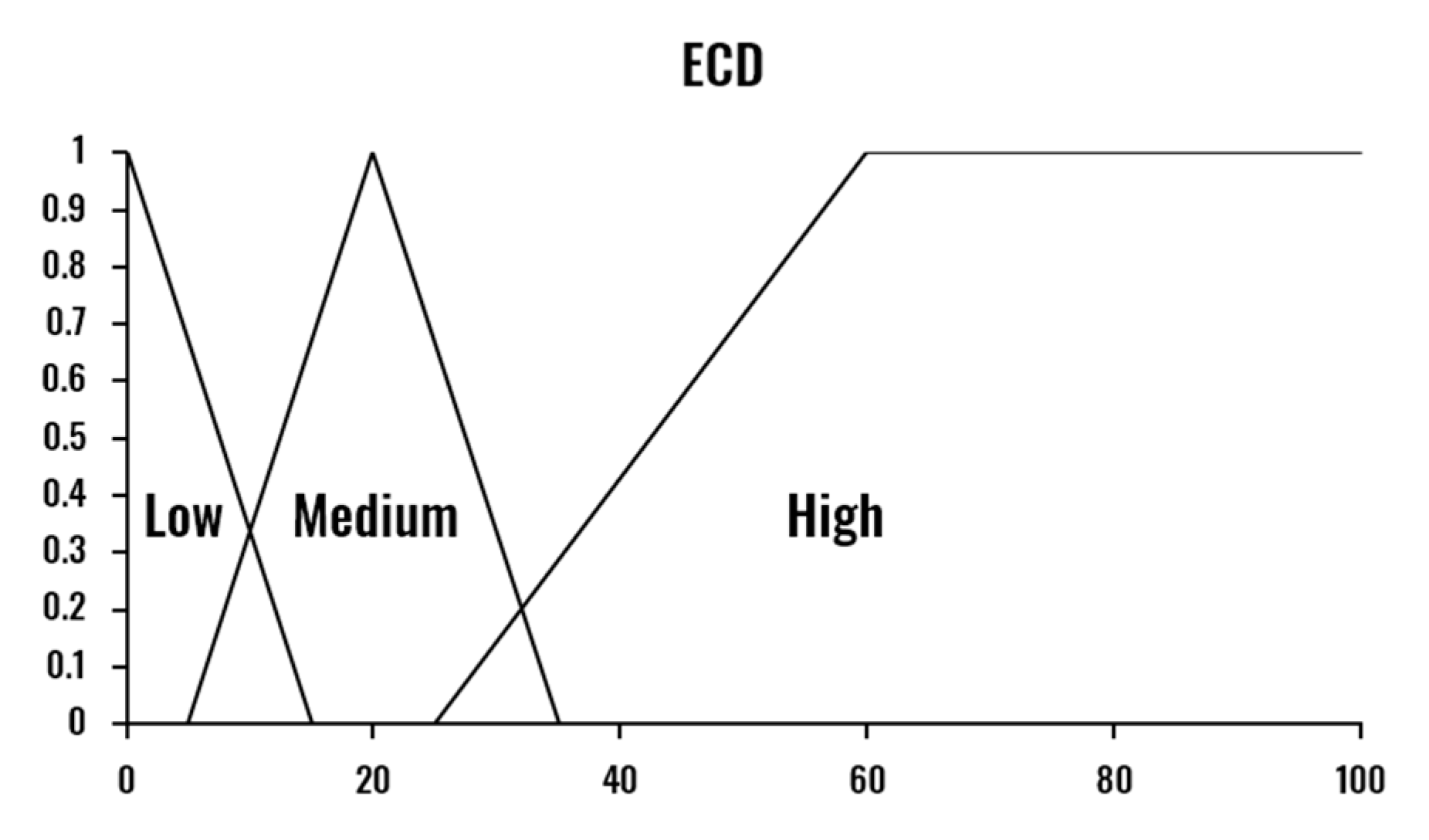
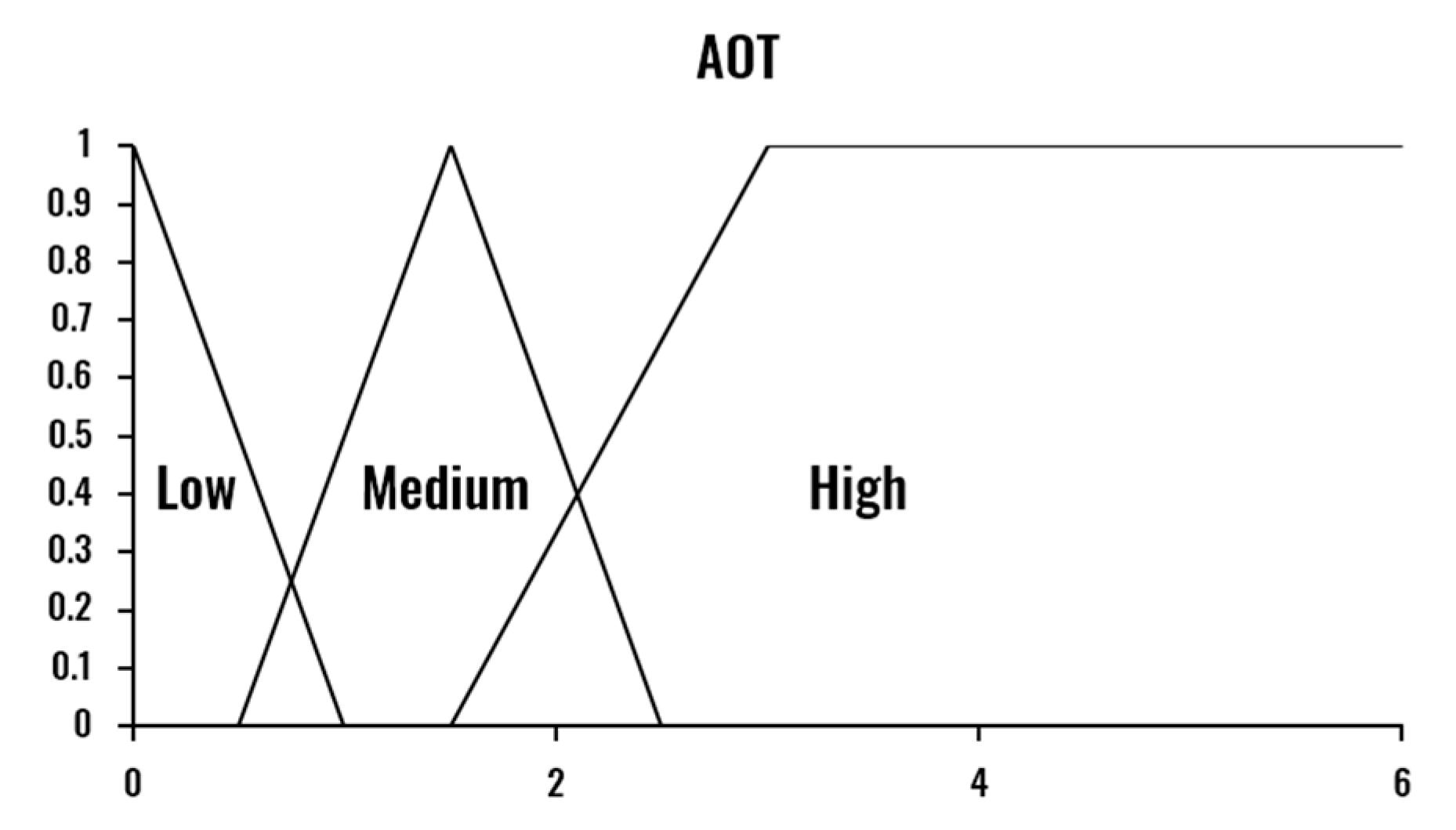
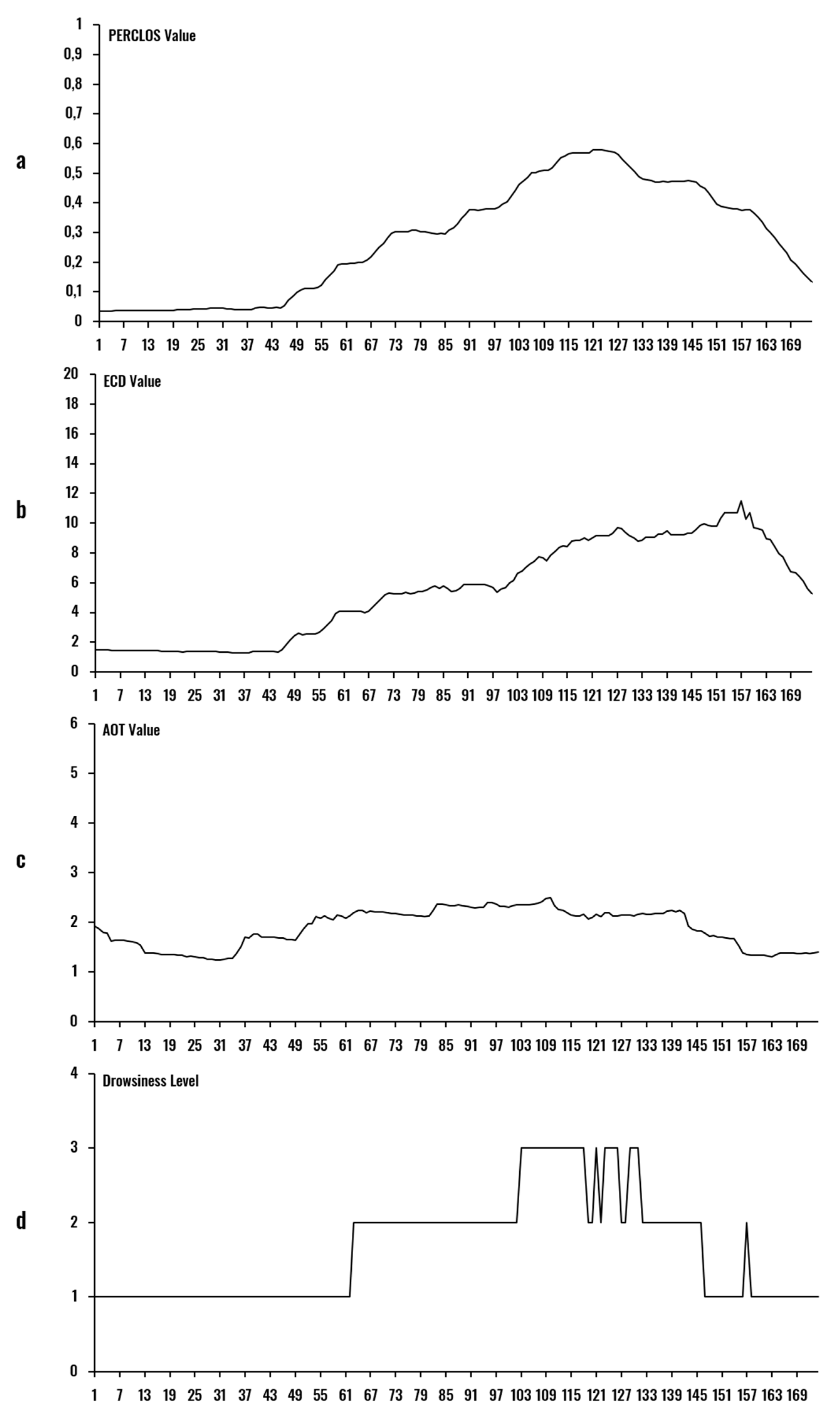
2.3. Driver Drowsiness Indicators
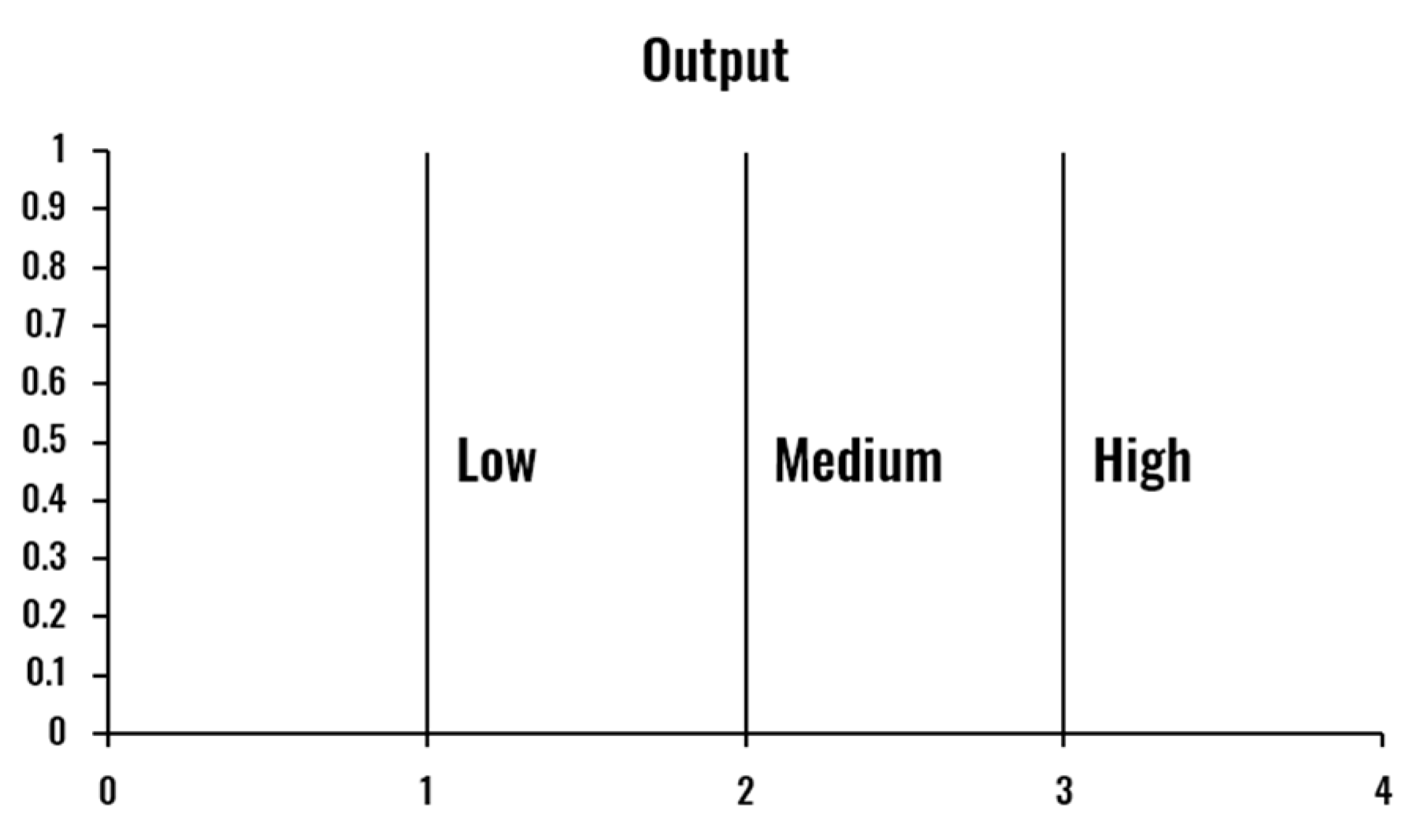
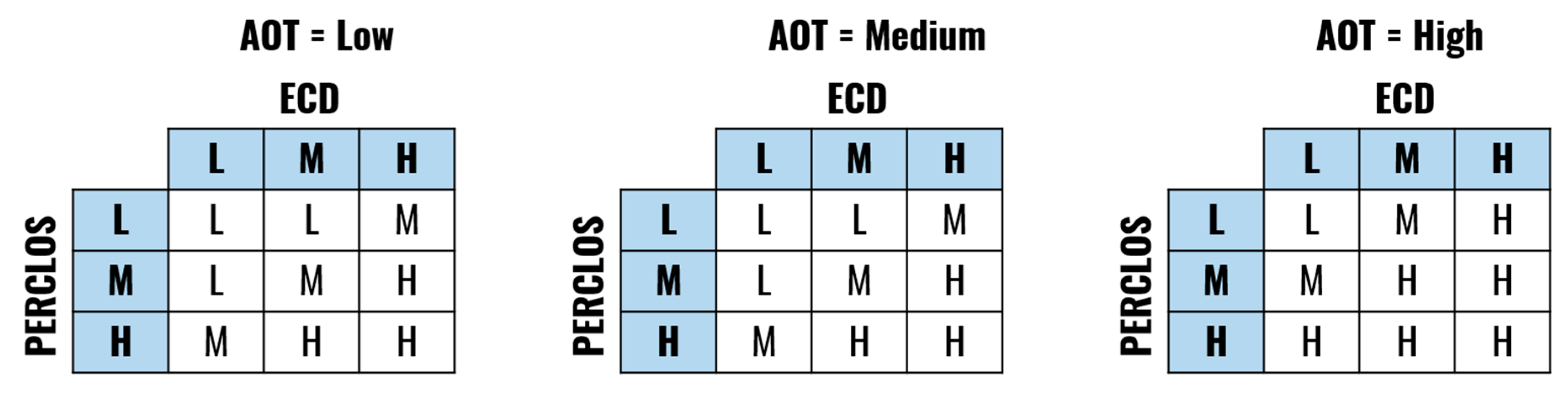
2.4. Fuzzy Inference System Applied to Drowsiness Level Estimation
2.5. Hardware
3. Results and Discussion
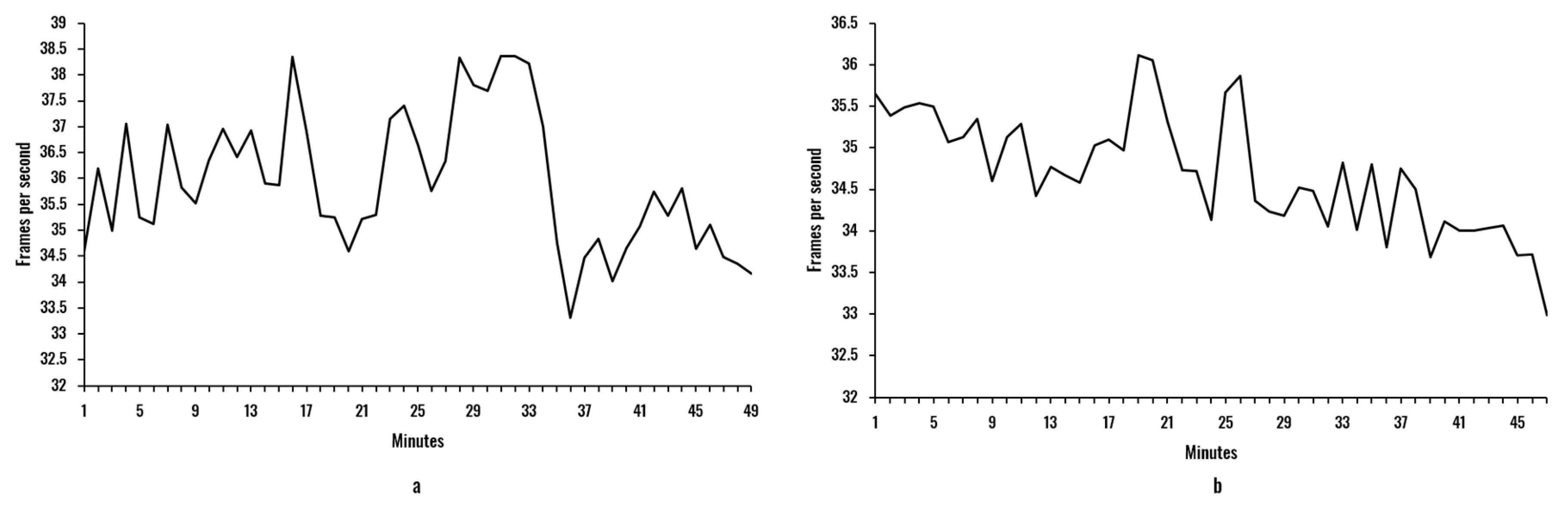
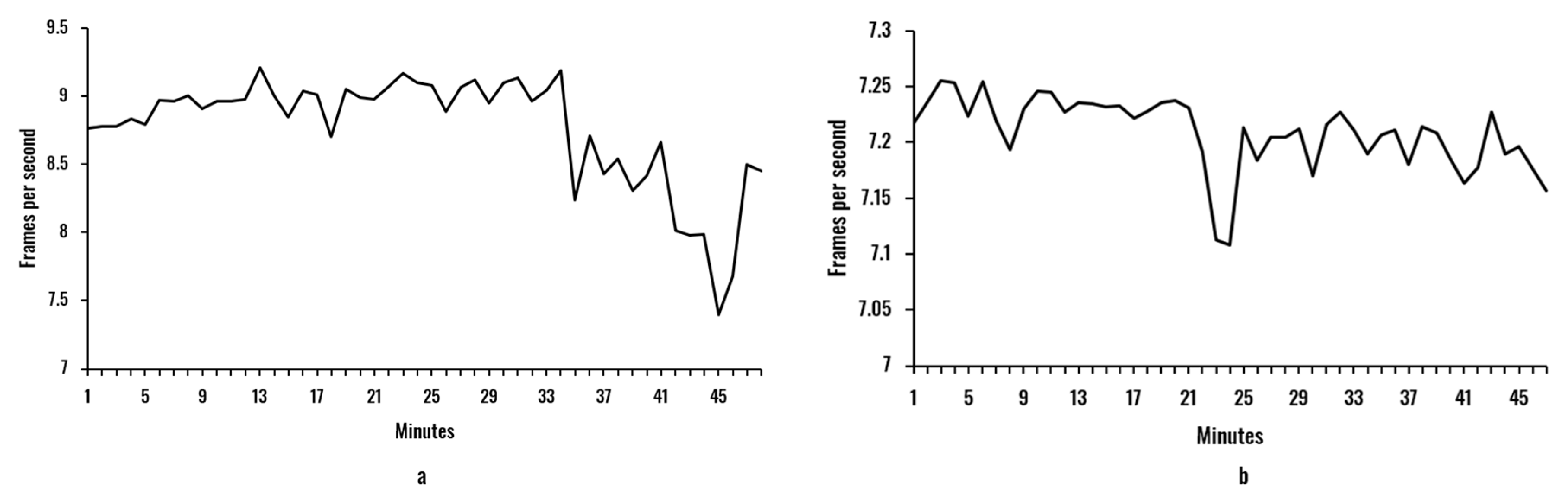
3.1. Computational Performance of the Model in Real-Time
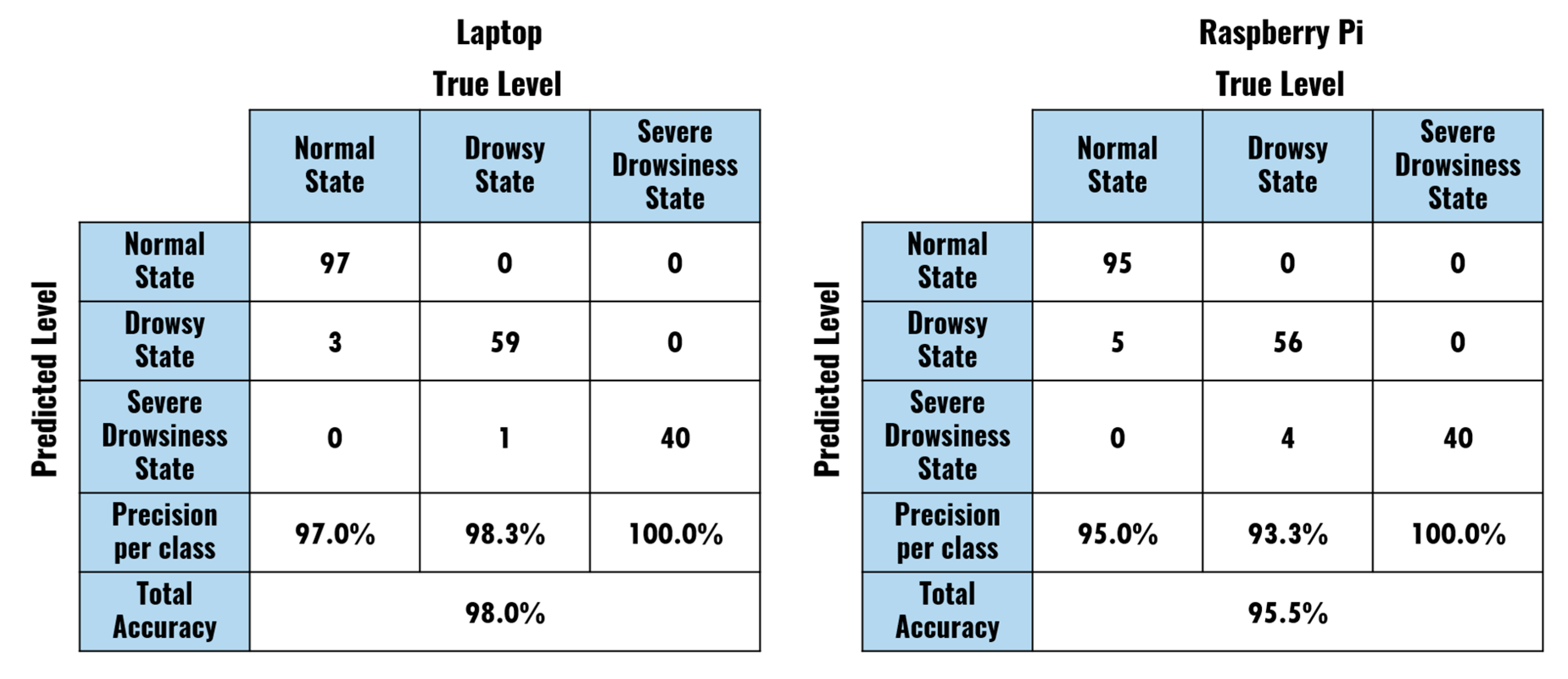
3.2. Accuracy of the Drowsiness Recognition System
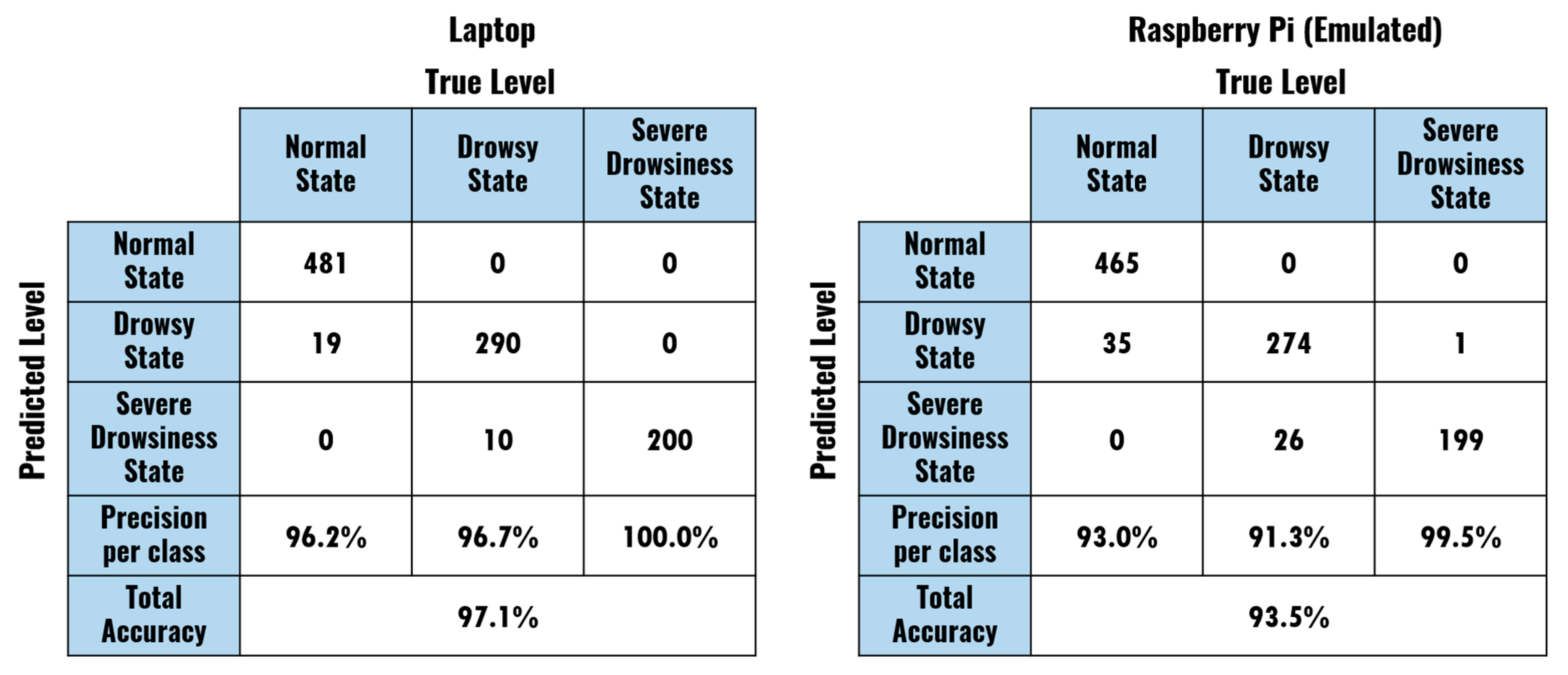
Extended Performance Validation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Owens, J.M.; Dingus, T.A.; Guo, F.; Fang, Y.; Perez, M.; McClafferty, J.; Tefft, B. Prevalence of Drowsy-Driving Crashes: Estimates from a Large-Scale Naturalistic Driving Study; AAA Foundation for Traffic Safety: Washington, DC, USA, 2018. [Google Scholar]
- Veruska Narciso, F.I.; Túlio de Mello, M.I.; Túlio de Mello, M. Segurança e saúde dos motoristas profissionais que trafegam nas rodovias do Brasil. Rev. Saude Publica 2017, 51, 26. [Google Scholar] [CrossRef]
- Higgins, J.S.; Michael, J.; Austin, R.; Åkerstedt, T.; Van Dongen, H.P.; Watson, N.; Czeisler, C.; Pack, A.I.; Rosekind, M.R. Asleep at the wheel-the road to addressing drowsy driving. Sleep 2017, 40, zsx001. [Google Scholar] [CrossRef] [PubMed]
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Detecting driver drowsiness based on sensors: A review. Sensors 2012, 12, 16937–16953. [Google Scholar] [CrossRef] [PubMed]
- Kaplan, S.; Guvensan, M.A.; Yavuz, A.G.; Karalurt, Y. Driver behavior analysis for safe driving: A survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3017–3032. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, J.; Ren, M.; Zheng, Y. Driver fatigue detection: A survey. Proc. World Congr. Intell. Control Autom. 2006, 2, 8587–8591. [Google Scholar] [CrossRef]
- Ramos, A.C.; Vellasco, M. Quantum-inspired evolutionary algorithm for feature selection in motor imagery EEG classification. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation, CEC 2018, Rio de Janeiro, Brazil, 8–13 July 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018. [Google Scholar]
- Jo, J.; Lee, S.J.; Park, K.R.; Kim, I.J.; Kim, J. Detecting driver drowsiness using feature-level fusion and user-specific classification. Expert Syst. Appl. 2014, 41, 1139–1152. [Google Scholar] [CrossRef]
- Zheng, R.; Tian, C.; Li, H.; Li, M.; Wei, W. Fatigue detection based on fast facial feature analysis. In Proceedings of the Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: New York, NY, USA, 2015; Volume 9315, pp. 477–487. [Google Scholar]
- Zhu, W.; Yang, H.; Jin, Y.; Liu, B. A method for recognizing fatigue driving based on dempster-shafer theory and fuzzy neural network. Math. Probl. Eng. 2017, 10. [Google Scholar] [CrossRef]
- Lin, L.; Huang, C.; Ni, X.; Wang, J.; Zhang, H.; Li, X.; Qian, Z. Driver fatigue detection based on eye state. Technol. Heal. Care 2015, 23, S453–S463. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Wei, L.; Zheng, P. Research on driving fatigue detection based on PERCLOS. In Proceedings of the 4th International Conference on Vehicle, Mechanical and Electrical Engineering, ICVMEE 2017, Taiyuan, China, 24–25 July 2017; DEStech Publications: Lancaster, PA, USA, 2017; pp. 207–211. [Google Scholar] [CrossRef]
- Abulkhair, M.; Alsahli, A.H.; Taleb, K.M.; Bahran, A.M.; Alzahrani, F.M.; Alzahrani, H.A.; Ibrahim, L.F. Mobile platform detect and alerts system for driver fatigue. Procedia Comput. Sci. 2015, 62, 555–564. [Google Scholar] [CrossRef][Green Version]
- Kong, W.; Zhou, L.; Wang, Y.; Zhang, J.; Liu, J.; Gao, S. A system of driving fatigue detection based on machine vision and its application on smart device. J. Sens. 2015, 11. [Google Scholar] [CrossRef]
- Manoharan, R.; Chandrakala, S. Android OpenCV based effective driver fatigue and distraction monitoring system. In Proceedings of the International Conference on Computing and Communications Technologies, ICCCT 2015, Chennai, India, 26–27 February 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015; pp. 262–266. [Google Scholar]
- Jabbar, R.; Al-Khalifa, K.; Kharbeche, M.; Alhajyaseen, W.; Jafari, M.; Jiang, S. Real-time driver drowsiness detection for android application using deep neural networks techniques. In Proceedings of the 9th International Conference on Ambient Systems, Networks and Technologies, Porto, Portugal, 8–11 May 2018; pp. 400–407. [Google Scholar]
- Galarza, E.E.; Egas, F.D.; Silva, F.M.; Velasco, P.M.; Galarza, E.D. Real time driver drowsiness detection based on driver’s face image behavior using a system of human computer interaction implemented in a smartphone. In Proceedings of the International Conference on Information Technology & Systems, La Libertad, Ecuador, 10–12 January 2018; pp. 563–572. [Google Scholar]
- Wijnands, J.S.; Thompson, J.; Nice, K.A.; Aschwanden, G.D.P.A.; Stevenson, M. Real-time monitoring of driver drowsiness on mobile platforms using 3D neural networks. Neural Comput. Appl. 2019, 1–13. [Google Scholar] [CrossRef]
- Fei, W.; Huabiao, Q. A FPGA based driver drowsiness detecting system. In Proceedings of the 2005 IEEE International Conference on Vehicular Electronics and Safety, ICVES 2005, Shaan’xi, China, 14–16 October 2005; pp. 358–363. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, F.; Sun, G.; Zhao, D.; Zheng, K. Driver fatigue detection system based on DSP platform. In Proceedings of the 22nd International Conference on Multimedia Modeling, Miami, FL, USA, 4–6 January 2016; pp. 47–53. [Google Scholar]
- Selvakumar, K.; Jerome, J.; Rajamani, K.; Shankar, N. Real-time vision based driver drowsiness detection using partial least squares analysis. J. Signal Process. Syst. 2016, 85, 263–274. [Google Scholar] [CrossRef]
- Teach, Learn, and Make with Raspberry Pi–Raspberry Pi. Available online: https://www.raspberrypi.org/ (accessed on 10 December 2019).
- The Power of Modern AI to Millions of Devices | NVIDIA Jetson Nano. Available online: https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-nano/ (accessed on 10 December 2019).
- Tinker Board | Single Board Computer | ASUS Global. Available online: https://www.asus.com/Single-Board-Computer/Tinker-Board/ (accessed on 10 December 2019).
- ROCK64 | PINE64. Available online: https://www.pine64.org/devices/single-board-computers/rock64/ (accessed on 10 December 2019).
- Mavely, A.G.; Judith, J.E.; Sahal, P.A.; Kuruvilla, S.A. Eye gaze tracking based driver monitoring system. In Proceedings of the IEEE International Conference on Circuits and Systems, Thiruvananthapuram, India, 20–21 December 2017; pp. 364–367. [Google Scholar]
- Mena, D.M.L.; Rosero, A.F.C. Portable artificial vision system to determine fatigue in a person using a raspberry PI3 card. In Proceedings of the 2017 International Conference on Information Systems and Computer Science, Quito, Ecuador, 23–25 November 2017; pp. 87–91. [Google Scholar]
- Hossain, M.Y.; George, F.P. IOT based real-time drowsy driving detection system for the prevention of road accidents. In Proceedings of the 2018 International Conference on Intelligent Informatics and Biomedical Sciences, Bangkok, Thailand, 21–24 October 2018; pp. 190–195. [Google Scholar]
- Ghazal, M.; Abu Haeyeh, Y.; Abed, A.; Ghazal, S. Embedded fatigue detection using convolutional neural networks with mobile integration. In Proceedings of the IEEE 6th International Conference on Future Internet of Things and Cloud Workshops, Barcelona, Spain, 6–8 August 2018; pp. 129–133. [Google Scholar]
- Kim, W.; Jung, W.-S.; Choi, H.K. Lightweight driver monitoring system based on multi-task mobilenets. Sensors 2019, 19, 3200. [Google Scholar] [CrossRef] [PubMed]
- Wierwille, W.W.; Wreggit, S.S.; Kirn, C.L.; Ellsworth, L.A.; Fairbanks, R.J. Research on Vehicle-Based Driver Status/Performance Monitoring; Development, Validation, and Refinement of Algorithms for Detection of Driver Drowsiness; U.S. Department of Transportation: Virginia, VA, USA, 1994.
- Sigari, M.H.; Fathy, M.; Soryani, M. A driver face monitoring system for fatigue and distraction detection. Int. J. Veh. Technol. 2013, 11. [Google Scholar] [CrossRef]
- Rigane, O.; Abbes, K.; Abdelmoula, C.; Masmoudi, M. A fuzzy based method for driver drowsiness detection. In Proceedings of the IEEE/ACS 14th International Conference on Computer Systems and Applications, AICCSA, Hammamet, Tunisia, 30 October–3 November 2017; pp. 143–147. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2005, San Diego, CA, USA, 20–26 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Schapire, R.E. Explaining adaboost. In Empirical Inference: Festschrift in Honor of Vladimir, N. Vapnik; Schoelkopf, B., Luo, Z., Vovk, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–52. [Google Scholar]
- Kazemi, V.; Sullivan, J. One millisecond face alignment with an ensemble of regression trees. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 18–20 June 1996; IEEE Computer Society: Washington, DC, USA, 2014; pp. 1867–1874. [Google Scholar]
- Sagonas, C.; Tzimiropoulos, G.; Zafeiriou, S.; Pantic, M. 300 faces in-the-wild challenge: The first facial landmark Localization Challenge. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 2–8 December 2013; pp. 397–403. [Google Scholar]
- Lin, L.; Huang, C.; Ni, X.; Wang, J.; Zhang, H.; Li, X.; Qian, Z. Driver fatigue detection based on eye state. In Proceedings of the 3rd International Conference on Biomedical Engineering and Technology, Beijing, China, 25–28 September 2014; pp. 453–463. [Google Scholar]
- Mamdani, E.H.; Assilian, S. An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man. Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Flores, M.J.; Armingol, M.J.M.; de la Escalera, A. Sistema avanzado de asistencia a la conducción para la detección de la somnolencia. Rev. Iberoam. Autom. Inform. Ind. RIAI 2011, 8, 216–228. [Google Scholar] [CrossRef]
- Jo, J. Vision-based method for detecting driver drowsiness and distraction in driver monitoring system. Opt. Eng. 2011, 50, 127202. [Google Scholar] [CrossRef]
- Buy a Raspberry Pi 3 Model B–Raspberry Pi. Available online: https://www.raspberrypi.org/products/raspberry-pi-3-model-b/ (accessed on 31 December 2019).
- Front Page-Raspbian. Available online: https://www.raspbian.org/ (accessed on 31 December 2019).
- Shoja Ghiass, R.; Arandjelović, O.; Bendada, A.; Maldague, X. Infrared face recognition: A comprehensive review of methodologies and databases. Pattern Recognit. 2014, 47, 2807–2824. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drowsiness Threshold | Window Size | FPS | Reference |
|---|---|---|---|
| 0.02 | 1, 2 min | 25 | [32] |
| 0.3, 0.25 | 4–5 | [41] | |
| 0.2 | 25 | [42] | |
| 0.2 | 8, 10 s | 25 | [8] |
| 0.4 | 24–25 s | 25 | [12] |
| 0.15, 0.18 | 30 s | 7 | [9] |
| Model | Haar | HOG | ||
|---|---|---|---|---|
| Hardware Setup | Mean fps | Standard Deviation | Mean fps | Standard Deviation |
| Laptop | 35.93 | 1.31 | 34.70 | 0.70 |
| Raspberry Pi | 8.75 | 0.59 | 7.21 | 0.07 |
| Model | Haar | HOG | ||
|---|---|---|---|---|
| Reduction Factor | Mean fps | Standard Deviation | Mean fps | Standard Deviation |
| Original | 8.75 | 0.59 | 7.21 | 0.07 |
| 0.7 | 10.58 | 0.52 | 9.6 | 0.11 |
| 0.6 | 12.14 | 0.7 | 11.17 | 0.16 |
| 0.5 | 15.94 | 0.66 | 14.77 | 0.29 |
| Drowsiness Level | Segments of Approximately 1 min Duration |
|---|---|
| Normal State | 100 |
| Drowsy State | 60 |
| Severe Drowsiness State | 40 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Celecia, A.; Figueiredo, K.; Vellasco, M.; González, R. A Portable Fuzzy Driver Drowsiness Estimation System. Sensors 2020, 20, 4093. https://doi.org/10.3390/s20154093
Celecia A, Figueiredo K, Vellasco M, González R. A Portable Fuzzy Driver Drowsiness Estimation System. Sensors. 2020; 20(15):4093. https://doi.org/10.3390/s20154093
Chicago/Turabian StyleCelecia, Alimed, Karla Figueiredo, Marley Vellasco, and René González. 2020. "A Portable Fuzzy Driver Drowsiness Estimation System" Sensors 20, no. 15: 4093. https://doi.org/10.3390/s20154093
APA StyleCelecia, A., Figueiredo, K., Vellasco, M., & González, R. (2020). A Portable Fuzzy Driver Drowsiness Estimation System. Sensors, 20(15), 4093. https://doi.org/10.3390/s20154093