1. Introduction
Software defined networking (SDN) [
1] provides fine-grained information to select the best forwarder to form global resource optimization rather than ad-hoc networks. This network technology provides the possibility of network reconfiguration through on-the-fly programming [
2]. Recently, using SDN in Wireless Sensor Networks (WSNs) has become an increasingly important trend. Due to the high dynamicity of WSNs, using SDN in WSNs can provide several benefits, including improving flexibility, boosting scalability, eliminating the complexity of the network, better configuration and management, and replacing rigidity to policy changes [
3,
4]. Dynamic reconfiguration of the network is a useful feature, especially in harsh environments, where wireless links could be highly unreliable, and thus network routing should be updated frequently [
3,
5]. Moreover, large scale WSNs will require multiple SDN controllers in order to manage their configuration.
It is worth mentioning that due to different characteristics between WSNs and traditional wired networks, applying SDN in WSNs introduces several new challenges, including [
6]:
In a WSN, most of the devices face severe limitations in terms of processing power, storage, and battery resources. Hence, it is of paramount importance to reduce unnecessary packet transmission in SDN-enabled WSNs in order to reduce packet collision and extend network lifetime. However, in a wired network, the main goal is to minimize the response time.
Unlike wired networks, the links in a WSN are highly unstable and unreliable. Therefore, WSN sensors are subject to several types of failures, namely, communication failures due to environmental obstacles and power failures due to constrained and insufficient battery resources. Thus, to overcome link unreliability, multipath solutions may be applied to increase the chance of successful data transmission that, in turn, will increase network overhead.
Accordingly, it can be concluded that the nature of WSNs is significantly more dynamic than wired networks. Hence, the controller placement in WSNs, in comparison to wired networks, is more critical and challenging and has a more profound impact on the performance, lifetime, and Quality of Service (QoS) of the network.
Since the SDN controller demands high storage and large computational power, the limited computational and storage capacity of available WSN devices hinders the implementation of the SDN controller. A promising solution to implement the SDN controller is to integrate additional node(s) within WSNs, which are supposed to be responsible for executing the SDN controller software. Although the notion behind the control plane in software-defined networks is based on a centralized fashion, the SDN controller must be physically distributed among multiple nodes to achieve higher performance, scalability, and fault tolerance [
7,
8].
If we adopt a distributed version of the SDN controller in WSNs, then the question is how to deploy the SDN controller nodes in the network. How many nodes are required, and where should they be placed? Two important QoS elements should be taken into account when it comes to the deployment of multiple controller nodes in a WSN, namely, (i) reliability and (ii) latency.
Reliability is a challenging issue in WSNs since low-power links are highly unreliable, and the link quality fluctuates a lot [
9]. Link failure can cause node inaccessibility to the network, disconnections, network performance degradation, and eventually node failure. In SDN-enabled WSNs, it is highly important to guarantee wireless connection to SDN controllers as they are acting as the brain of the network, and provide network reconfiguration. Thus, it is crucial to provide network reliability by replicating SDN controllers in order to avoid a single point of failure [
10]. Hence, in the network architecture, multiple controllers should be accommodated to achieve a higher reliability.
Latency is an important performance metric that can be considerably affected by the placement of controller nodes. A tactful placement of controller nodes can improve the network performance by reducing the distance between sensor nodes and the controller(s) covering the sensors. A shorter distance between controllers and sensors also decreases the network traffic and saves energy consumption. Thus, one of the major parameters for placing controllers in a sensing area is the distance to sensor nodes.
The physically distributed control plane in SDN-enabled WSNs could result in more reliability, fault tolerance, timeliness, and better performance. However, to make the control plane logically centralized, it is necessary to synchronize controllers and provide a consistent view of the network’s state for all of them. Thus, a physically distributed control plane can provide such benefits at the expense of synchronization costs. In [
7], the trade-off between the synchronization cost of multiple controllers and network latency was discussed. The results indicated the feasibility of multi-controller deployments in terms of network latency if the right number of controllers are deployed.
The efficient node placement in SDN-enabled WSNs has essential benefits in several application domains. For example, it can be used in industrial applications, such as smart factories, to enable environmental monitoring, enhance productivity, increase flexibility, improve energy consumption, and reduce maintenance costs. In such harsh environments, where performance and time sensitivity are of paramount importance, using a single controller to manage the whole network is not sufficient. Instead, it is more effective and also challenging to deploy multiple SDN controllers to ensure the satisfaction of requirements [
11,
12,
13,
14].
In this paper, we intend to find an optimal controller placement to maximize the network performance subject to (i) a certain upper bound for the synchronization cost that limits the maximum number of controllers, and (ii) reliability constraints. We formulate the problem as an optimization problem, which is then modeled as an Integer Linear Programming (ILP). The proposed ILP model is solved using the Cuckoo Placement of Controllers (Cuckoo-PC) algorithm and the results are compared not only with the recently proposed methods in the literature, but also with the CPLEX ILP Solver.
Contributions. Our major contributions are listed as follows:
Specifying the optimal placement of controller nodes in a WSN to optimize the network latency with respect to the inter-controller synchronization overhead.
Targeting both reliability and performance (in terms of the number of hops between controllers and sensor nodes) in the deployment phase of SDN-enabled WSNs.
Proposing the Cuckoo-PC algorithm to solve the placement optimization problem, which considerably outperforms ILP and Quantum Annealing (QA) in terms of scalability and performance, respectively.
Organization of the paper: in
Section 2, a comprehensive review of related work is presented. In
Section 3, we describe the problem and assumptions, following by formulating the problem as an optimization problem.
Section 4 presents the algorithm proposed to address the optimization problem. In
Section 5, the performance of the proposed method is investigated. Finally, in
Section 6, we conclude our paper by providing a summary along with the future directions.
3. Problem Modeling
This paper addresses an SDN-enabled sensor network, where sensor nodes collect data and forward it either directly to a sink node (if the sink node is located in the coverage area of the sensor) or towards a sink node by handing the data to the neighbor sensors. It is assumed that the placement of the sink nodes has already been accomplished using state-of-the-art methods such as [
8,
11], and our paper mainly focuses on the placement of controller nodes respecting the given location of sinks and sensors.
3.1. Problem Representation
A WSN is represented by an undirected graph, where vertices are partitioned into a set of sensors T that continuously generate data, sinks S to collect the sensors’ data, and controllers C to implement the SDN functionalities. Consequently, in the graph representing a WSN, . An edge of the graph denotes a wireless connection between a pair of nodes. The total number of sensors is N, where . A pair of nodes connected with an edge is called neighbor. Furthermore, to represent the placement problem, we define AC as a set of candidate controllers. Hence, .
To represent the problem, a binary vector
X is utilized which determines whether a candidate controller has been selected or not. Thus, the size of
X equals to the number of candidate controllers:
3.2. Reliability Constraints
A sensor is
k-controller-covered if and only if it has at least
k paths of length
to
k controllers in
C (
k is an integer number ≥ 1). A network is defined as
k-controller-covered if each sensor
is
k-controller-covered. In order to represent the
k-controller-covered constraint, we define the binary matrix
Y that determines whether the shortest distance between the
ith sensor and the
jth candidate controller is shorter than
or not:
where
is the shortest path (in terms of the number of hops) between node
and controller
, which can be calculated by the Dijkstra algorithm.
It is expected that each sensor is covered by
k controllers (
k ≥ 1) to avoid a single point of failure and to have a reliable network. Now we can formulate the
k-controller-covered constraint as follows:
where
denotes the
ith sensor.
3.3. Timing Constraints
To meet timing requirements in WSNs, the rate of routing requests coming from sensors to a particular controller should not exceed a threshold. The threshold denotes the maximum rate of routing requests that a controller can process [
31,
39] in an acceptable time. In other words, if the load of a controller exceeds the threshold, the controller is overloaded. This threshold is considered in our model and called as the load constraint. In the formulation of the load constraint, the load of sensor
i is denoted by
and defined as the rate of routing messages per second for those routing messages that do not match the sensor’s lookup table and must be sent to the controller [
31]. If a sensor covered by
n controllers (i.e., the distance between those
n controllers and the sensor is shorter than
), the load of the
ith sensor on the
jth controller covering the sensor is denoted by
wi,j, which is equal to
. In other words, we assume that the load of a sensor is uniformly distributed across the controllers covering the sensor [
11]. Let us assume that all the controllers have the same type and the same capacity, and
W shows the maximum workload that a controller can handle within an acceptable time, then the workload constraint is reflected by:
where
is the number of selected controllers covering the
ith sensor. Due to reliability requirements, we apply a more strict workload constraint; if
controllers fail, the remaining active ones should be able to handle the entire workload of all the failed controllers without any violation of the latency requirements. That is the reason to divide the right side of the inequality by
.
It is worth mentioning that besides the load constraint, the limitation of the number of hops between sensors and controllers reflected in the definition of k-controller-covered is a sort of timing constraint; otherwise, having only k controllers would be enough even for huge WSNs.
3.4. Inter-Controller Synchronization Cost
To calculate the inter-controller synchronization cost, we use a function called as
SyncCostController() which is a function of the number of selected controllers. The more the number of controllers, the higher the value of this function. To calculate the value of this function for the different number of controllers, we use the flow table synchronization overhead introduced in (Figure 10 of [
32]), where the inter-controller synchronization cost is investigated and classified into several types.
In addition, a predefined limit for the maximum inter-controller synchronization overhead with respect to the size of the network is considered, denoted by
SyncLimit(N). Indeed,
SyncLimit(N) is a function of the number of nodes in the network and is a non-descending function growing with the size of the network. In other words, for bigger networks, this limit increases. To calculate the value of this function, we use the results presented in (Figure 3b of [
32]), where controller-node synchronization overhead for different sizes of the network is investigated. Apparently, if too many controllers are selected such that the inter-controller synchronization overhead exceeds
SyncLimit(N), the synchronization overhead can hinder further improvement of the network performance.
Therefore, to respect the synchronization overhead constraint, the number of selected controllers, i.e.,
, is set to the maximum value that satisfies the following condition:
The reason to consider a maximum value for selected controllers is that a higher number of controllers can potentially improve the network performance, as long as the condition of Equation (5) holds. Therefore, the overall size of the problem space is turned to which is equal to the number of combinations to choose out of .
Obviously, when the inter-controller synchronization limit is high enough to choose all the candidate controllers (i.e., ), the problem can be simply solved by choosing all the candidate controllers. However, most often, , implying that selecting all the candidate controllers leads to violation of inter-controller synchronization constraint.
Hence, the constraint that we need to consider in our optimization model is
where
is calculated according to Equation (5).
3.5. Optimization Problem
Objective. Since the controller needs to keep in touch with sensors to manage the routing decisions dynamically, the number of hops between sensors and the controller(s) considerably affects the network performance. A long path between sensors and the controller(s) can increase not only the network traffic but also the delay of exchanging control messages. Accordingly, we would like to place the controller nodes such that the farthest controller that covers a sensor becomes as close as possible to the sensor. Accordingly, to minimize the maximum distance between sensors and controllers, we should:
where
indicates the distance between
and its furthest controller among the
k controllers covering the sensor and formulated as follows:
Accordingly, the optimization problem is formulated as follows:
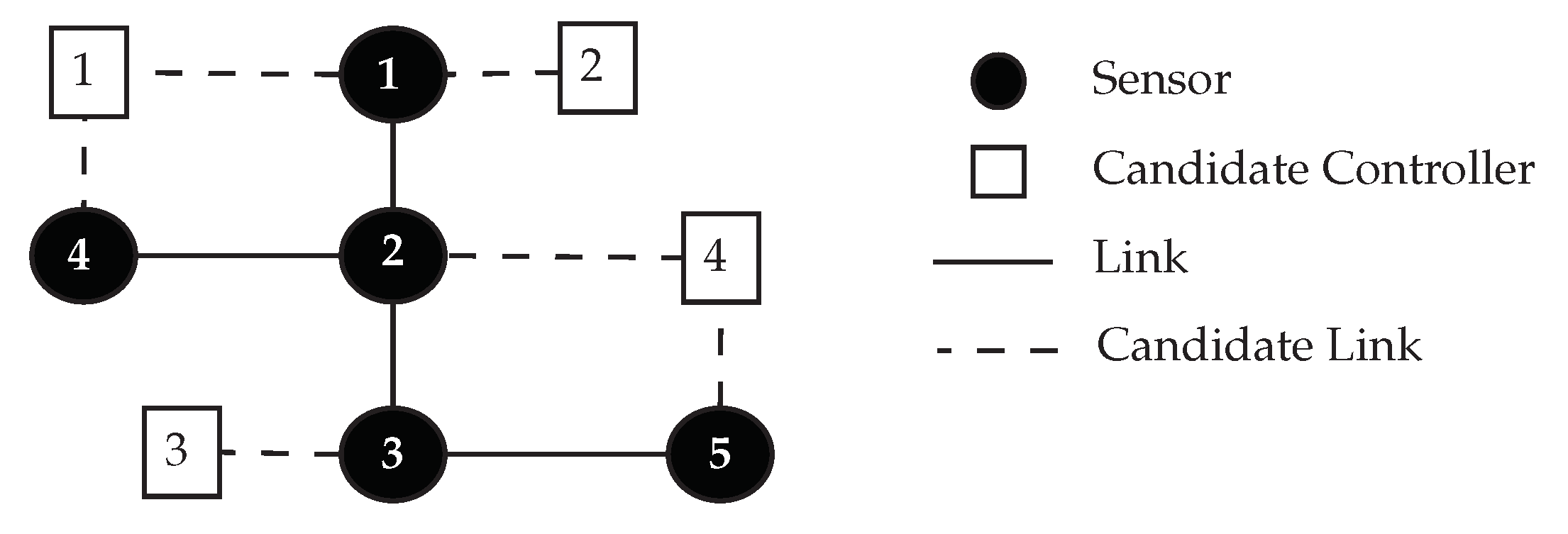
3.6. An Illustrative Example
Figure 1 illustrates a simple example to clarify our system model. In the example there are five sensors and four candidate locations to place controllers. Let us assume
,
, and
for the given network is 7 Mbps. The cost of inter-controller synchronization, i.e.,
, for using 2, 3, and 4 controllers is equal to 3 Mbps, 6 Mbps, and 9 Mbps, respectively. Apparently, in case of using only one controller, since no synchronization is needed, the
is equal to 0. Therefore, according to Equation (
5), the maximum number of controllers for which the
does not exceed the
is equal to 3. In this regard, only three controllers will be placed. Accordingly, all possible combinations for placing three controllers in four candidate locations are (1, 2, 3), (1, 2, 4), (2, 3, 4), and (1, 3, 4).
For each possible combination, the furthest controller to each sensor and the distance between them are calculated and listed in
Table 1. Considering the network shown in
Figure 1, in the first case, the distance between the sensors and their furthest controller is 3, 2, 3, 3, and 2 hops, for Sensor 1, Sensor 2, Sensor 3, Sensor 4, and Sensor 5, respectively. In the second case, it is 2, 2, 3, 3, and 1, respectively. In the third case, it is 3, 2, 3, 3, and 2, respectively. Finally, in the fourth case, it is 3, 2, 3, 3, and 2, respectively. Accordingly, the average distance between sensors and their furthest controller in each case is 2.6, 2.2, 2.6, and 2.6, respectively. Thus, in this example, the candidate locations of the second case, i.e., (1, 2, 4), are selected to place the controllers.
It is worth noting that only the controllers that cover a sensor contribute in the calculation of the furthest controller to the sensor. In other words, if there is a controller farther than from the sensor, it is not considered as the farthest controller of the sensor. For example, in the first case, i.e., (1, 2, 3), although the furthest controllers to Sensor 5 are Controller 1 and Controller 2, as their distance to Sensor 5 is 4 > , none of them is considered as the farthest controller to Sensor 5.
5. Performance Evaluation
This section starts with discussing the setups adopted for the performance evaluation. Then, it presents the details of the sensitivity analysis, which is then followed by the study of the time complexity of the Cuckoo-PC algorithm. Finally, the evaluation results are depicted and discussed.
5.1. Experimental Setups
To conduct the experiments, we considered four benchmarks, each of which is a WSN with different sizes. The first benchmark includes 100 sensors and 16 candidate locations to place controllers and is referred to as WSN1. The second benchmark consists of 150 sensors and 22 candidate locations to place controllers and is called WSN2. The third benchmark, named as WSN3, has 170 sensors and 26 candidate locations to place controllers. Finally, the last benchmark includes 200 sensors and 30 candidate locations to place controllers and is referred to as WSN4. System parameters used in our experiments are derived from related papers, including [
11,
52], which are listed in
Table 2. The value of
and
that are required to calculate the number of selected controllers for each benchmark in Equation (5) is set according to [
32].
To evaluate Cuckoo-PC, we have implemented an optimization framework in Java that includes Cuckoo-PC, quantum annealing, and simulated annealing algorithms. The proposed optimization framework is publicly available in [
53].
To run the experiments, a laptop with Mac OS, Core i5 2.9 GHz, and 8 GB memory is used. The algorithms were run 30 times to reach a 95% confidence interval.
For performance evaluation, we also define three metrics based on the optimization problem formulated in Equations (
8) and (
9), namely
,
, and
. These metrics are listed in
Table 3.
5.2. Sensitivity Analysis
Since the algorithm parameters have a substantial impact on the performance of the Cuckoo-PC algorithm, a sensitivity analysis is performed to measure the effectiveness of every parameter. In the sensitivity analysis, a reasonable range for every parameter of the algorithm is investigated to find the best values.
In this section, to determine the proper value of the algorithm parameters, we conduct a sensitivity analysis considering all the parameters of Cuckoo-PC. The reasonable range of parameters is derived from related papers, including [
46,
47,
48]. Then, multiple values within the specified ranges are checked to find the proper value of each parameter. The effects of varying algorithm parameters are represented in
Figure 2a–d. Finally, all selected values for algorithm parameters, along with the range of parameters, are listed in
Table 4.
It is worth mentioning that all the experiments reported in this section are conducted on WSN3. Additionally, in each set of experiments, excluding the parameter which is under investigation, the other parameters are set to the values listed in
Table 4. For example, when the eggs killing rate (
p) is being investigated (
Figure 2a), the mature cuckoo killing rate (
q) is set to 0.1, the number of eggs per cuckoo is randomly selected in a range from 5 to 20,
is set to 250, and
is set to 1000.
Eggs Killing Rate (p). As is shown in
Figure 2a, according to our experiments, when the eggs killing rate is set to 0.5, the best results can be achieved in terms of the summation of the average of
. Increasing the eggs killing rate higher than 0.5 does not improve the quality of the solutions (in terms of the summation of the average of
); it, however, prolongs the execution time of Cuckoo-PC unnecessarily.
Mature Cuckoo Killing Rate (q). The impact of
q on the quality of the solution in terms of summation of
is depicted in
Figure 2b. As it is shown in this figure, when
q increases, the quality of the solution is degraded significantly. Hence, the most efficient result is achieved when
q is set to 0.1.
Total Cuckoo Population (). The number of total cuckoo population implies the number of regions in the problem space which are explored. Hence, by increasing
, the chance of finding the optimal solution rises. According to our experiments, as is shown in
Figure 2c, this parameter has a more considerable impact on the efficiency of Cuckoo-PC in comparison to other parameters. Moreover, it also has a prominent effect on the convergence of the algorithm.
When goes higher, the quality of the solutions is improved at the expense of spending more execution time. The best solution is achieved when is set to 250. However, when is set to lower values (i.e., 100 and 150), although the average execution time of Cuckoo-PC is decreased, the quality of the solution is getting worse, revealing a premature convergence. Moreover, when is set to a higher value such as 300, there is no considerable improvement in the quality of the solution, whereas the execution time of Cuckoo-PC dramatically rises.
Maximum Cuckoo Population (). As is shown in
Figure 2d, when the value of
is set to 1000, the best solution is achieved. However, when
is set to a higher value such as 1500, there is no considerable improvement in the quality of the achieved solution, whereas the execution time of Cuckoo-PC severely increases.
5.3. Time Complexity
Cuckoo-PC, as presented in Algorithm 1, is composed of five main steps. A brief explanation of each step and its relevant time complexity is as follows:
Hence, the time complexity can be written as . Moreover, since increasing the network size does not result in a considerable change in , it can be concluded that has dominance over . Thus, the overall time complexity of Cuckoo-PC is: .
5.4. Results
To investigate and evaluate the performance of Cuckoo-PC against other methods introduced in the literature, we use the ILP method proposed by Mousavi et al. in 2018 [
30] as the baseline. The reason to opt for this method is that it is the state-of-the-art method for placing controllers in WSNs.
The results achieved by the four methods in terms of these parameters are illustrated in
Figure 3,
Figure 4 and
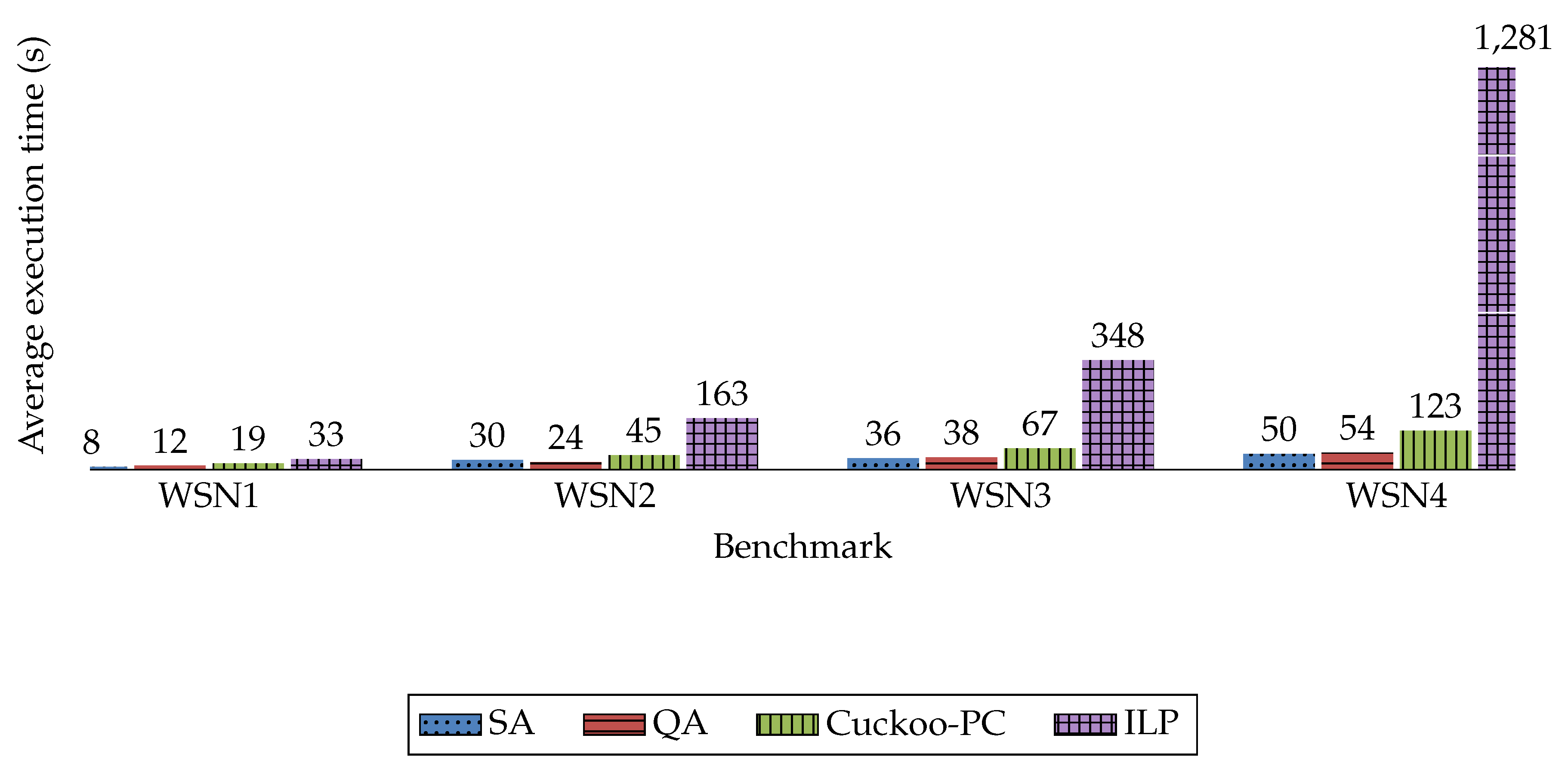
Figure 5. The comparison of the execution time of these four methods is also available in
Figure 6.
Furthermore, to clearly demonstrate the performance enhancement of Cuckoo-PC against other baselines (i.e., SA and QA),
Table 5 lists the percentage of improvement in
,
, and
, achieved by our method against SA and QA for the considered WSNs. For example, for WSN1, Cuckoo-PC outperforms SA and QA in
by 33%.
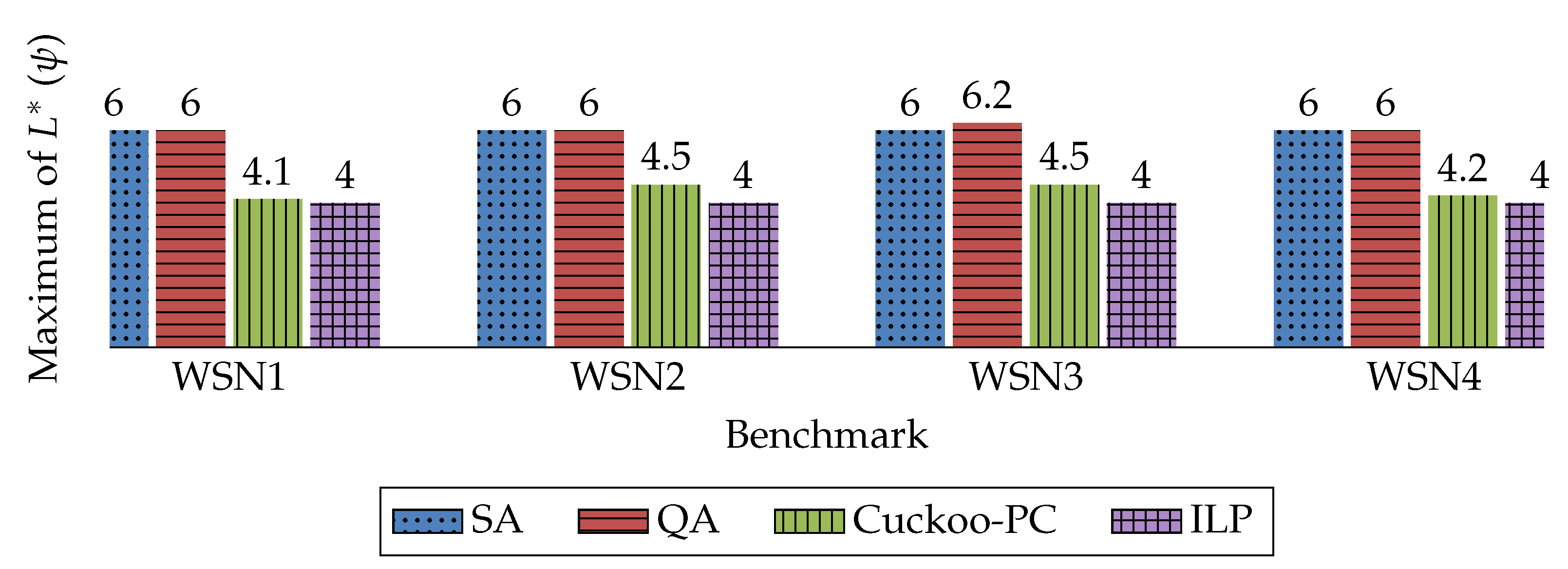
As shown in
Figure 3 and
Figure 6, and
Table 5, in terms of the maximum amount of
for all nodes, ILP achieves the best results for all benchmarks, whilst its execution time is much longer compared with other methods. On the other hand, Cuckoo-PC generates approximately the same results in a more reasonable time. Therefore, comparing Cuckoo-PC against ILP reveals that in large network sizes, for example, a WSN with 1000 sensors, ILP is infeasible due to its extremely long processing time, whilst Cuckoo-PC finds a near-optimal solution in a reasonable time. Furthermore, compared with QA and SA, Cuckoo-PC achieves the best results for all benchmarks, whilst QA and SA obtain almost identical results, which, on average, are about 33% worse than Cuckoo-PC.
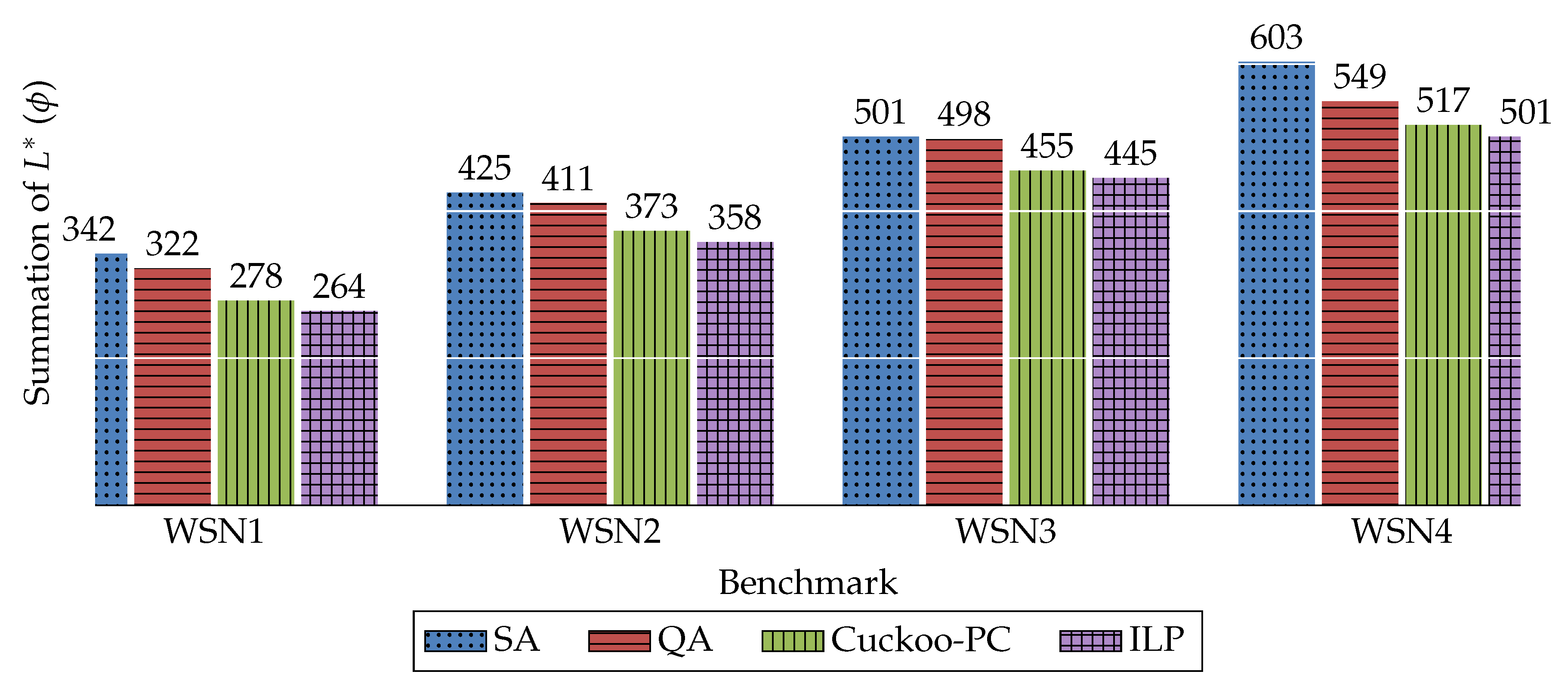
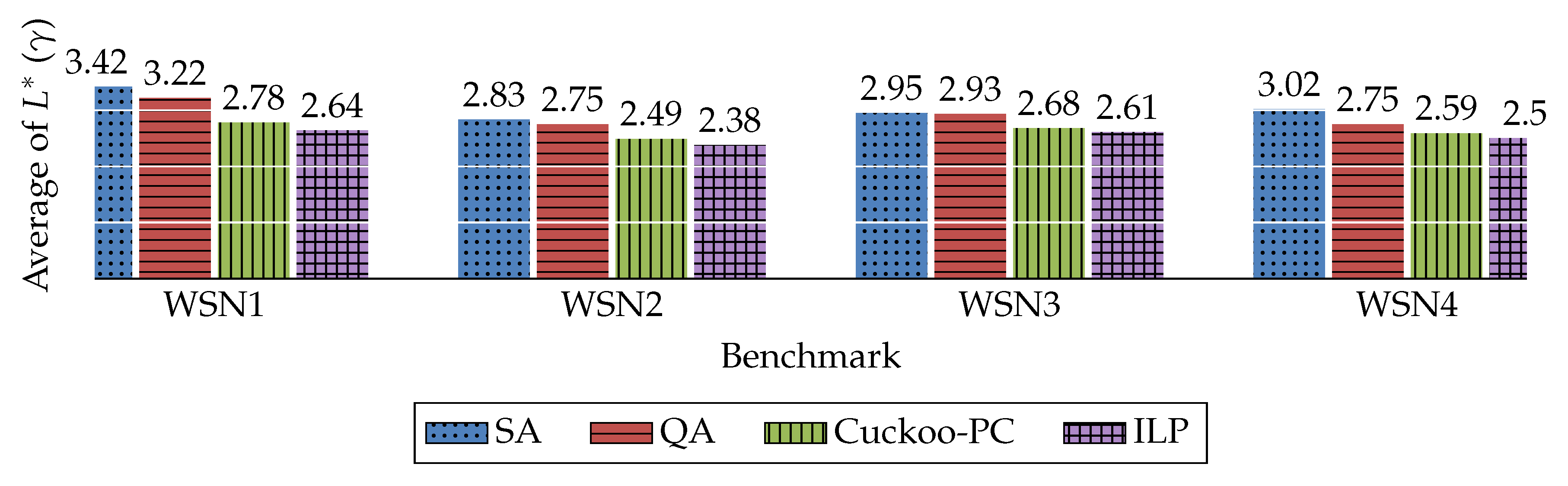
Due to the definition of
and
in
Table 3, these two parameters reflect the same aspects of the results. Thus, as shown in
Figure 4 and
Figure 5, and
Table 5, it is concluded that in terms of the summation and the average of
, Cuckoo-PC outperforms the other two algorithms in all the WSNs. The improvement percentage in terms of the summation and average of
of Cuckoo-PC in WSN4, against QA is about 6% and against SA is about 14%.
Moreover, considering
Figure 6, although Cuckoo-PC is much faster than ILP, it is a bit slower than the other SA and QA. The reason for the larger execution time of Cuckoo-PC compared to SA and QA is inherent in the nature of population-based meta-heuristic algorithms (e.g., Cuckoo, Genetic Algorithm, Ant Colony Optimization) where multiple regions of the problem space are explored simultaneously whereas in individual-based meta-heuristic algorithms (such as SA, QA, and Tabu search) only one area of the problem space is explored at each iteration of the algorithm.
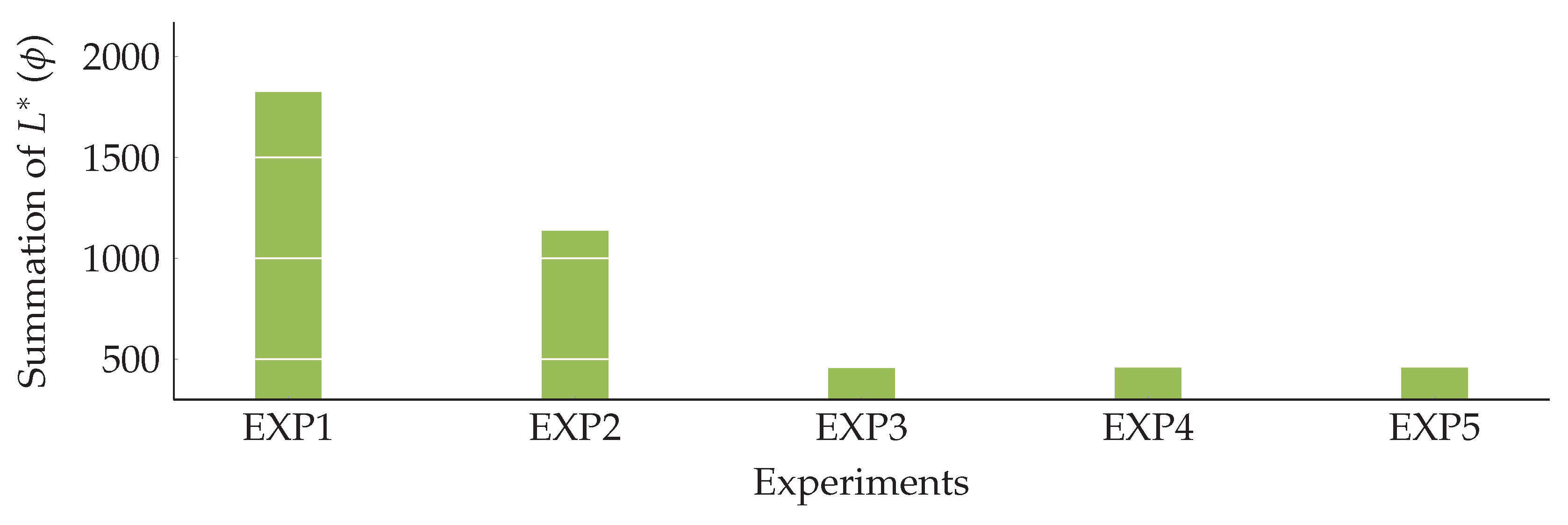
5.5. Interaction between and L*
In this section, we aim to profoundly investigate the effects of varying
on
. To do so, we have conducted five experiments, all of them are performed on WSN3. In each experiment, all of the parameters, excluding
, are set to values listed in
Table 2 and
Table 4. According to
Table 2, the legitimate value of
for WSN3 is equal to 4.675, which leads to selecting eight controllers out of 26 candidates. However, to measure the effects of varying
on
, we set the amount of
to different ratios of its legitimate value. In each experiment, the value of
is set to
,
, 1, 2, and 3 times the amount of its legitimate value, respectively. Hence, the number of selected controllers in each experiment is equal to 4, 5, 8, 16, and 24, respectively. Detailed information for each experiment is presented in
Table 6.
The results are depicted in
Figure 7. For EXP1 and EXP2, setting the amount of
to less than the legitimate value, negatively affects the performance of the network in terms of summation of
. Hence, by increasing
, there is a significant improvement in the summation of
. However, when the
goes higher than the legitimate value, in EXP4 and EXP5, there is no considerable improvement in the summation of
.
6. Conclusions
Even though deploying multiple controllers can considerably improve network performance, it increases the inter-controller synchronization overhead. Therefore, it is an important research challenge to locate SDN controllers in a WSN in order to achieve maximum performance considering the constraints coming from the inter-controller synchronization overhead. We have formulated the problem as an ILP problem by considering the network performance and reliability. We also proposed the Cuckoo-PC algorithm to find a near-optimal solution in a reasonable time. To evaluate the proposed method, we compared our results in terms of the average distance between sensors and controller with other state-of-the-art methods. We considered four different benchmarks. The average improvement percentage of Cuckoo-PC against QA in terms of the average distance between sensors and controllers, is 13%, 9%, 8%, and 6% for benchmark 1, 2, 3, and 4, respectively. In terms of the average distance between sensors and controllers, Cuckoo-PC deviates from the optimal solution, generated by the ILP solver, by 5%, 6%, 2%, and 3% for each benchmark, respectively. However, the ILP method is not feasible in large-scale networks due to its extremely long execution time. The average execution time of Cuckoo-PC in the benchmarks is about 0.57, 0.27, 0.19, and 0.09 of that of the ILP method, respectively. Accordingly, the major preference to use Cuckoo-PC rather than the ILP method is that although it achieves approximately similar results as ILP, Cuckoo-PC is noticeably more scalable, which makes it a perfect solution for large scale networks. Obviously, due to the scalability issue of the ILP method, for a large-scale use case where the network may include a few thousand sensors, the ILP solver simply fails to find a solution even within a few days. That is the reason that we do not consider the ILP method as a reliable real-world solution and Cuckoo-PC is suggested.
For future work, we plan to investigate a multi-objective controller placement problem where the objectives are (i) maximizing network performance, (ii) minimizing the inter-controller synchronization overhead, and (iii) minimizing the deployment cost of the network.

 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}