Investigation on Stray-Capacitance Influences of Coaxial Cables in Capacitive Transducers for a Space Inertial Sensor

 ,
,
Abstract
1. Introduction
2. Connecting Method of Coaxial Cables and Its Stray-Capacitance Analysis
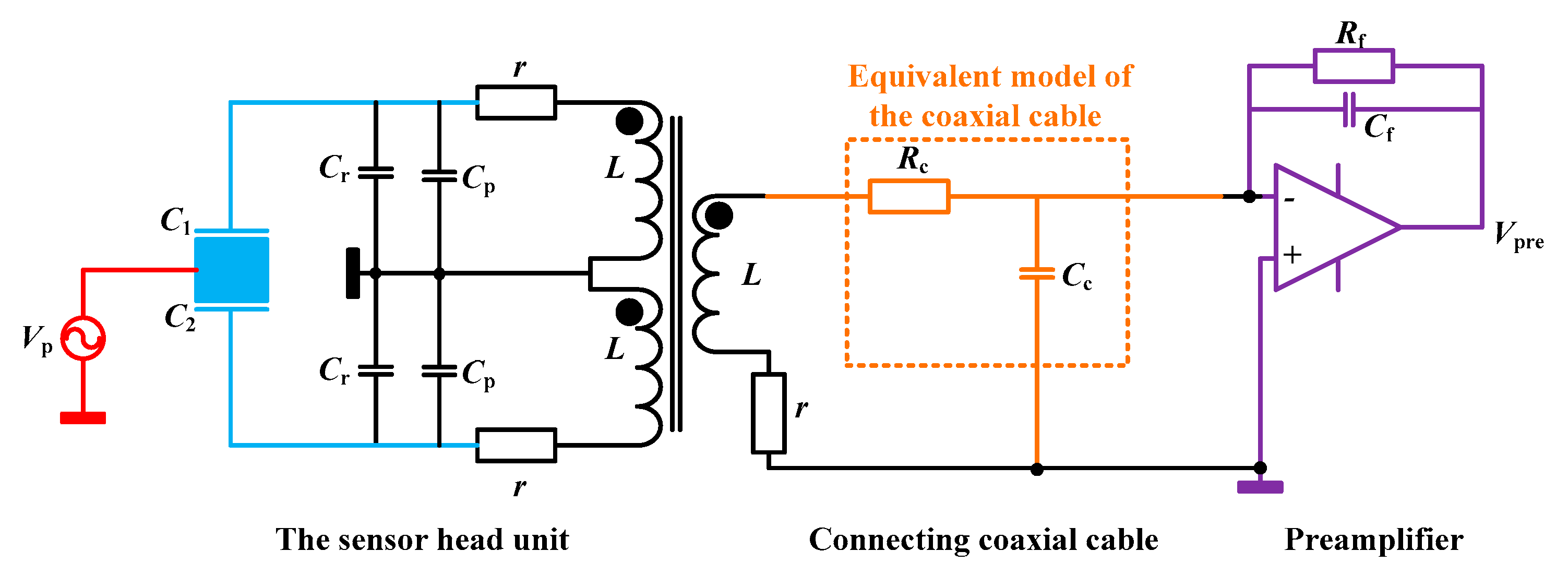
2.1. The Principle of the Capacitive Transducer Focusing on the Cable’s Connecting Method
2.2. The Noise Analysis on the Influences of Stray-Capacitance of the Cables
2.3. The Parameters and Potential Ability of the Prototype Circuit
3. Experimental Investigation on Stray-Capacitance Estimation, Capacitive Transducer Calibration, and Noise Level Comparison
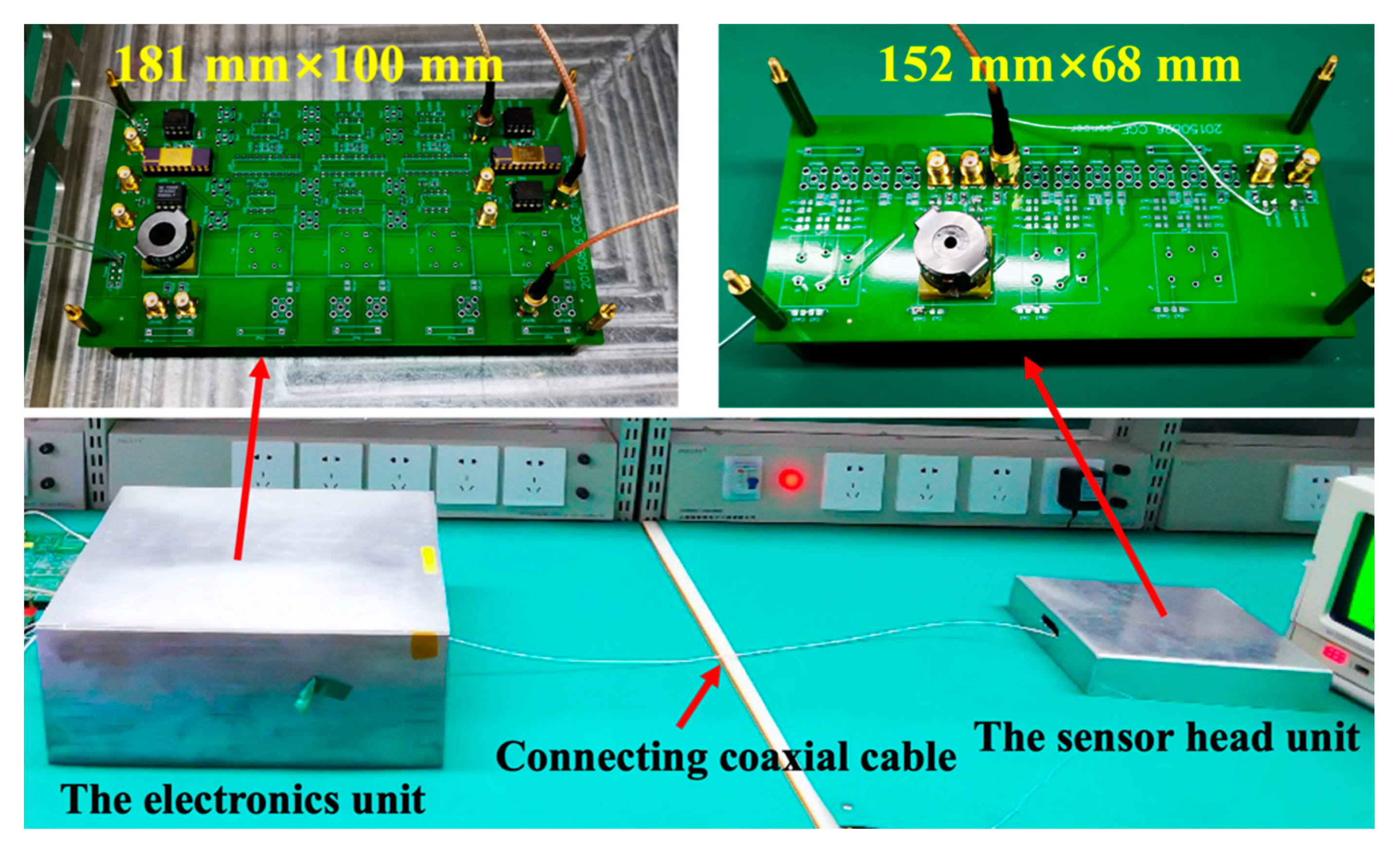
3.1. Experimental System Set up
3.2. Stray-Capacitance Estimation
3.3. Calibration of the Whole Capacitive Transducer
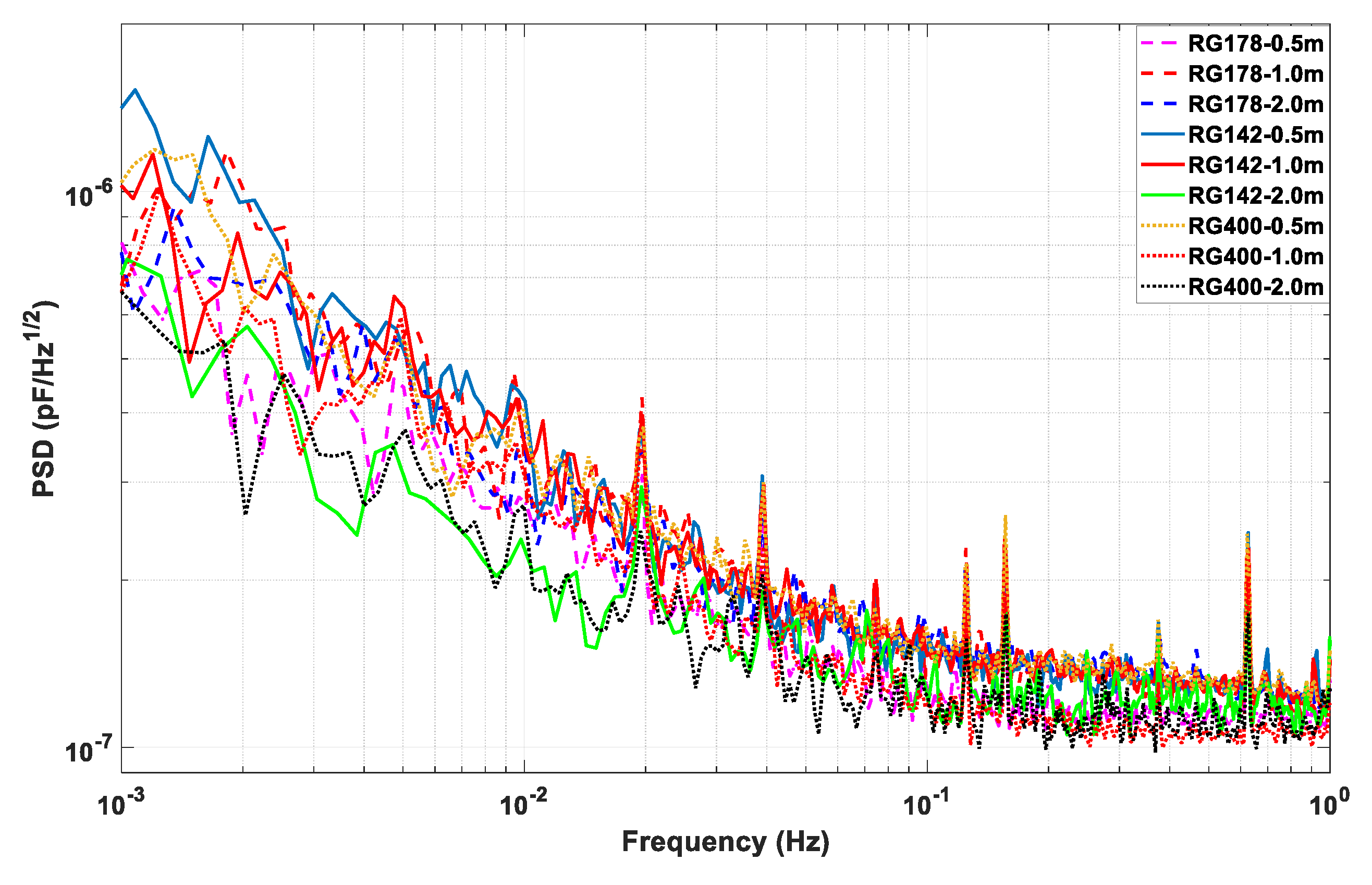
3.4. Noise Level Comparison of the Whole Capacitive Transducer
4. Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Touboul, P.; Foulon, B.; Christophe, B.; Marque, J.P. CHAMP, GRACE, GOCE instruments and beyond. In Geodesy for Planet Earth; Steve Kenyon, S., Pacino, M.C., Marti, U., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 215–221. [Google Scholar]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Castelli, E.; Cavalleri, A.; Cesarini, A.; Cruise, A.M.; et al. Beyond the Required LISA Free-Fall Performance: New LISA Pathfinder Results down to 20 μHz. Phys. Rev. Lett. 2018, 120, 061101. [Google Scholar] [CrossRef] [PubMed]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.T.; Bassan, M.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Caleno, M.; et al. Sub-Femto-g Free Fall for Space-Based Gravitational Wave Observatories: LISA Pathfinder Results. Phys. Rev. Lett. 2016, 116, 231101. [Google Scholar] [CrossRef] [PubMed]
- Touboul, P.; Métris, G.; Rodrigues, M.; André, Y.; Baghi, Q.; Bergé, J.; Boulanger, D.; Bremer, S.; Carle, P.; Chhun, R.; et al. MICROSCOPE Mission: First Results of a Space Test of the Equivalence Principle. Phys. Rev. Lett. 2017, 119, 231101. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.; Duan, H.; Gong, Y.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A Space-Borne Gravitational Wave Detector. Classical Quant. Grav. 2016, 33, 035010. [Google Scholar] [CrossRef]
- Josselin, V.; Touboul, P.; Kielbasa, R. Capacitive Detection Scheme for Space Accelerometers Applications. Sens. Actuators A Phys. 1999, 78, 92–98. [Google Scholar] [CrossRef]
- Mance, D. Development of Electronic System for Sensing and Actuation of Test Mass of the Inertial Sensor LISA. Ph.D. Thesis, University of Split and Swiss Federal Institute of Technology, Zurich, Switzerland, 2012. [Google Scholar]
- Cavalleri, A.; Dolesi, R.; Fontana, G.; Hueller, M.; Turneaure, J.; Vitale, S.; Weber, W. Progress in the Development of a Position Sensor for LISA Drag-Free Control. Classical Quant. Grav. 2001, 18, 4133–4144. [Google Scholar] [CrossRef]
- Gan, L.; Mance, D.; Zweifel, P. Actuation to Sensing Crosstalk Investigation in the Inertial Sensor Front-End Electronics of the Laser Interferometer Space Antenna Pathfinder Satellite. Sens. Actuators A Phys. 2011, 167, 574–580. [Google Scholar] [CrossRef]
- Gan, L.; Mance, D.; Zweifel, P. LTP is FEE Sensing Channel: Front-End Modeling and Symmetry Adjustment Method. IEEE Sens. J. 2012, 12, 1071–1077. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.; Bassan, M.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Caleno, M.; et al. Capacitive Sensing of Test Mass Motion with Nanometer Precision Over Millimeter-Wide Sensing Gaps for Space-Borne Gravitational Reference Sensors. Phys. Rev. D 2017, 96, 062004. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Born, M.; Bortoluzzi, D.; Cardines, N.; Castelli, E.; Cavalleri, A.; Cesarini, A.; Cruise, A.M.; et al. Analysis of the Accuracy of Actuation Electronics in the Laser Interferometer Space Antenna Pathfinder. Rev. Sci. Instrum. 2020, 91, 045003. [Google Scholar] [CrossRef]
- Bai, Y.; Zhou, Z.; Tu, H.; Wu, S.; Cai, L.; Liu, L.; Luo, J. Capacitive Position Measurement for High-Precision Space Inertial Sensor. Frontiers of Physics in China 2009, 4, 205–208. [Google Scholar] [CrossRef]
- Hu, M.; Bai, Y.Z.; Zhou, Z.B.; Li, Z.X.; Luo, J. Resonant Frequency Detection and Adjustment Method for a Capacitive Transducer with Differential Transformer Bridge. Rev. Sci. Instrum. 2014, 85, 055001. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Fan, J.; Zhao, C.; Yan, S.; Hu, C.; Tu, L. Modeling and Analysis of the Noise Performance of the Capacitive Sensing Circuit with a Differential Transformer. Micromachines 2019, 10, 325. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Zhang, X.; Zou, S.; Huang, X.; Xue, C.; Liu, J.; Liu, Q.; Yang, S.; Tu, L. Design of a Carrier Wave for Capacitive Transducer with Large Dynamic Range. Sensors 2020, 20, 992. [Google Scholar] [CrossRef] [PubMed]
- Siemes, C.; Rexer, M.; Schlicht, A.; Haagmans, R. GOCE Gradiometer Data Calibration. J. Geod. 2019, 93, 1603–1630. [Google Scholar] [CrossRef]
- Floberghagen, R.; Fehringer, M.; Lamarre, D.; Muzi, D.; Frommknecht, B.; Steiger, C.; Piñeiro, J.; Da Costa, A. Mission Design, Operation and Exploitation of the Gravity Field and Steady-State Ocean Circulation Explorer Mission. J. Geod. 2011, 85, 749–758. [Google Scholar] [CrossRef]
- Lotters, J.C.; Olthuis, W.; Veltink, P.H.; Bergveld, P. A Sensitive Differential Capacitance to Voltage Converter for Sensor Applications. IEEE T. Instrum. Meas. 1999, 48, 89–96. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhao, J.; Wang, X.; Xia, G.M.; Qiu, A.P.; Su, Y.; Xu, Y.P. A Sub-Μg Bias-Instability MEMS Oscillating Accelerometer with an Ultra-Low-Noise Read-Out Circuit in CMOS. IEEE J. Solid-St. Circ. 2015, 50, 2113–2126. [Google Scholar] [CrossRef]
- Gilavdary, I.; Mekid, S.; Riznookaya, N.; Abdul Sater, A. Transient Responses and Stability in the Differential Electrostatic Sensor of Inertial and Gravitational Moments with Asymmetry. Measurement 2018, 116, 318–325. [Google Scholar] [CrossRef]
- Verma, V.K.; Yadava, R.D.S. Stochastic Resonance in MEMS Capacitive Sensors. Sens. Actuators B Chem. 2016, 235, 583–602. [Google Scholar] [CrossRef]
- Yin, Y.; Sun, B.; Han, F. Self-Locking Avoidance and Stiffness Compensation of a Three-Axis Micromachined Electrostatically Suspended Accelerometer. Sensors 2016, 16, 711. [Google Scholar] [CrossRef] [PubMed]
- Gettings, C.; Speake, C.C. A Method for Reducing the Adverse Effects of Stray-Capacitance on Capacitive Sensor Circuits. Rev. Sci. Instrum. 2019, 90, 025004. [Google Scholar] [CrossRef] [PubMed]
- Sunderland, A.; Veryaskin, A.V.; Golden, H.; Mcrae, W.; Ju, L.; Blair, D.G. Differential Readout for a Magnetic Gradiometer. Sens. Actuators A Phys. 2009, 153, 5–12. [Google Scholar] [CrossRef]
- Baikie, I.D.; Venderbosch, E.; Meyer, J.A.; Estrup, P.J.Z. Analysis of Stray Capacitance in the Kelvin Method. Rev. Sci. Instrum. 1991, 62, 725–735. [Google Scholar] [CrossRef]
- Nagatomo, T.; Miki, N. Reduction of Parasitic Capacitance of a PDMS Capacitive Force Sensor. Micromachines 2018, 9, 570. [Google Scholar] [CrossRef]
- Kim, H.; Lee, B.; Mun, Y.; Kim, J.; Han, K.; Roh, Y.; Song, D.; Huh, S.; Ko, H. Reconfigurable Sensor Analog Front-End Using Low-Noise Chopper-Stabilized Delta-Sigma Capacitance-to-Digital Converter. Micromachines 2018, 9, 347. [Google Scholar] [CrossRef]
- Xu, H.; Qiao, J.; Zhang, J.; Han, H.; Li, J.; Liu, L.; Wang, B. A High-Resolution Leaky Coaxial Cable Sensor Using a Wideband Chaotic Signal. Sensors 2018, 18, 4154. [Google Scholar] [CrossRef]
- De Marcellis, A.; Reig, C.; Cubells-Beltrán, M. A Capacitance-to-Time Converter-Based Electronic Interface for Differential Capacitive Sensors. Electronics 2019, 8, 80. [Google Scholar] [CrossRef]
- SRS Data Sheets. Available online: https://thinksrs.com/downloads/pdfs/catalog/SR785c.pdf (accessed on 5 June 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electronic Parameters | Value |
|---|---|
| Transformer inductance L | 6.3 mH |
| Transformer quality factor Qt | ~90 |
| Equivalent coaxial quality factor Qc | ~3.4 × 104 |
| Feedback capacitance Cf | 5.0 pF |
| Input noise voltage density en | 15.0 nV/Hz1/2 |
| Input noise current density in | 10.0 fA/Hz1/2 |
| AC pumping amplitude Vp | 5.0 V |
| AC pumping frequency ωp | 2π × 90 kHz |
| Coaxial cables | In Table 2 |
| Types | Conductor Stranding | Conductor Diameter | Cable Outer Diameter | Stray Capacitance |
|---|---|---|---|---|
| M17/60-RG142 | 1 | 0.91 mm | 4.95 mm | 96.5 pF/m |
| M17/93-RG178 | 7 | 0.30 mm | 1.80 mm | 96.5 pF/m |
| M17/128-RG400 | 19 | 0.98 mm | 4.95 mm | 96.5 pF/m |
| Cables | Length | The Tuning Capacitance Cr | PCB Stray-Capacitance Cp | Cable’s Stray-Capacitance Cc |
|---|---|---|---|---|
| RG142/RG178/RG400 | 0.5 m | 204.2 ± 0.5 pF | 24.9 ± 0.8 pF | 45.4 ± 0.7 pF |
| 1.0 m | 182.4 ± 0.5 pF | 90.7 ± 1.3 pF | ||
| 2.0 m | 136.3 ± 0.5 pF | 181.4 ± 2.6 pF |
| Cables | Calibrated Sensitivity Coefficient (V/pF) | ||
|---|---|---|---|
| 0.5 m | 1.0 m | 2.0 m | |
| RG142 | 31.37 ± 0.26 | 32.33 ± 0.21 | 32.16 ± 0.21 |
| RG178 | 31.53 ± 0.21 | 32.46 ± 0.21 | 32.53 ± 0.22 |
| RG400 | 31.68 ± 0.20 | 32.52 ± 0.21 | 32.49 ± 0.21 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.; Wang, C.; Wang, Y.; Bai, Y.; Hu, M.; Li, K.; Li, Z.; Qu, S.; Wu, S.; Zhou, Z. Investigation on Stray-Capacitance Influences of Coaxial Cables in Capacitive Transducers for a Space Inertial Sensor. Sensors 2020, 20, 3233. https://doi.org/10.3390/s20113233
Yu J, Wang C, Wang Y, Bai Y, Hu M, Li K, Li Z, Qu S, Wu S, Zhou Z. Investigation on Stray-Capacitance Influences of Coaxial Cables in Capacitive Transducers for a Space Inertial Sensor. Sensors. 2020; 20(11):3233. https://doi.org/10.3390/s20113233
Chicago/Turabian StyleYu, Jianbo, Chengrui Wang, Ying Wang, Yanzheng Bai, Ming Hu, Ke Li, Zhuxi Li, Shaobo Qu, Shuchao Wu, and Zebing Zhou. 2020. "Investigation on Stray-Capacitance Influences of Coaxial Cables in Capacitive Transducers for a Space Inertial Sensor" Sensors 20, no. 11: 3233. https://doi.org/10.3390/s20113233
APA StyleYu, J., Wang, C., Wang, Y., Bai, Y., Hu, M., Li, K., Li, Z., Qu, S., Wu, S., & Zhou, Z. (2020). Investigation on Stray-Capacitance Influences of Coaxial Cables in Capacitive Transducers for a Space Inertial Sensor. Sensors, 20(11), 3233. https://doi.org/10.3390/s20113233