1. Introduction
In the past, drones or unmanned aerial vehicles (UAVs) have been used only as expensive military aircraft or small toys for kids. After the expanded permission of the federal aviation administration for using drones for commercial and non-hobbyist purposes, drones are being applied in day to day activities. Drones replace the traditional method of business operations with less human and limited infrastructure, which helps to reduce the time and cost of commercial and business activities. As a consequence, drones are widely applicable in various domains such as in agriculture for crop and herd monitoring, environmental and natural disaster monitoring, aerial photography, border surveillance, emergency assistance, search and rescue missions, relay communications and weather monitoring [
1,
2]. The need for drones has increased linearly over the past decade. According to the Drone Market Report 2019, by the Drone Industry Insights, the sales of the commercial drones are expected to increase and India will become the third-largest commercial drone market in the year 2024 [
3]. Drone-based communication systems provide two kinds of communication—air to ground (communication with a base station) and air to air (communication with other drones) [
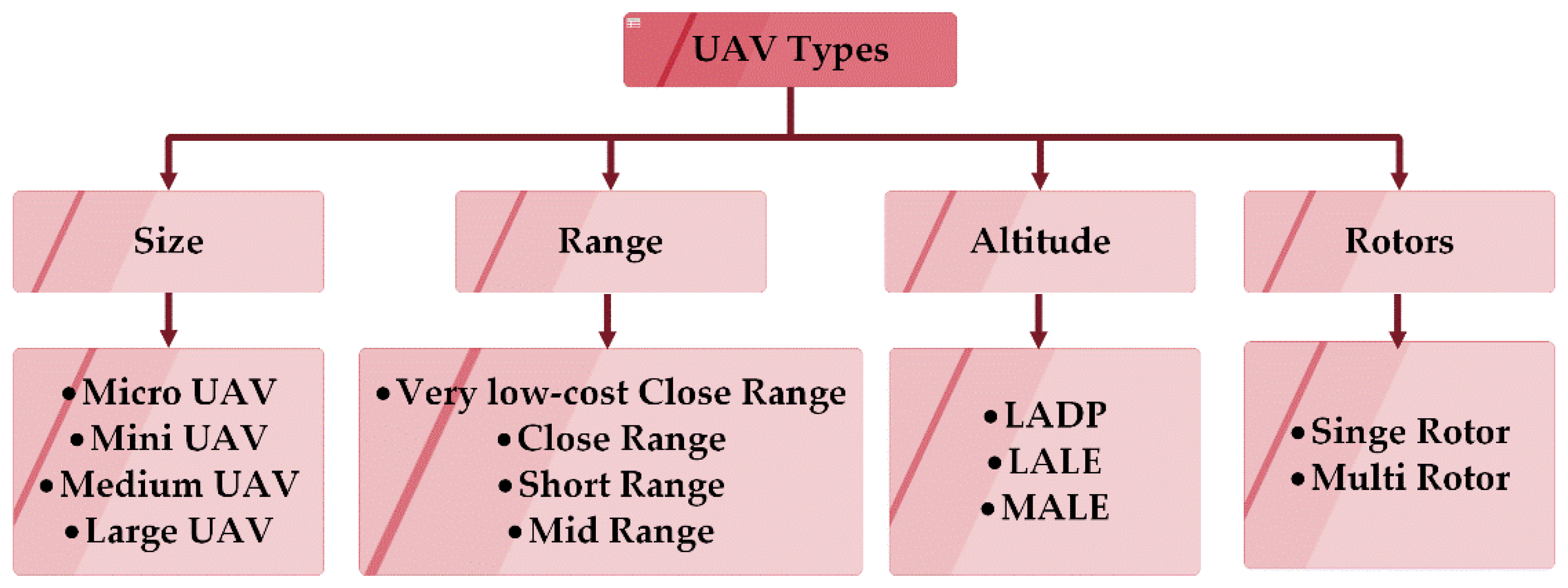
4]. The recent development in drones and its related technologies opens the market for various commercial applications. Based on the application or problem to be solved, the drones of various types can be applied. In general, drones can be classified based on their size, range, and endurance, number of rotors, and altitude, as shown in
Figure 1 [
5].
UAV network topology is highly complex due to the dynamic, three-dimensional (3D) environment with changing UAV velocities. Another difficulty is the limitation of the range between UAVs and the ground station. When the number of UAVs increases, it is essential to use clustering schemes as they ensure the necessary level of network performance, such as end-to-end delay, throughput, and energy efficiency. The UAVs are divided into multiple groups or clusters in the clustering technique, which shares the same geographic location. For such a clustered setup, only the chosen cluster head (CH) is responsible for inter-cluster and intra-cluster communication [
6,
7].
Usage of single drones for the applications mentioned above limits the efficiency of missions and could not be achieved in some cases. In such cases, multiple drones are preferred over a single drone for successful mission completion. Hence, the need for efficient communication among multiple drones arises. For the better achievement of this, a leader is elected to co-ordinate the multiple drones. However, implementing multiple drones in real-time is not as easy when compared to a single drone because, in the case of multiple drones, many critical factors come into consideration like communication between the drones and range of communication. To be more precise, controlling multiple drones in performing a single operation is a hideous process because if there is no proper communication between multiple drones, there is the chance that one drone may collide with the other [
8]. Further, to improve efficiency in battery capacity and to perform separate tasks, multiple drones are divided into clusters. Even in these clusters, leaders are elected for better communication among drones.
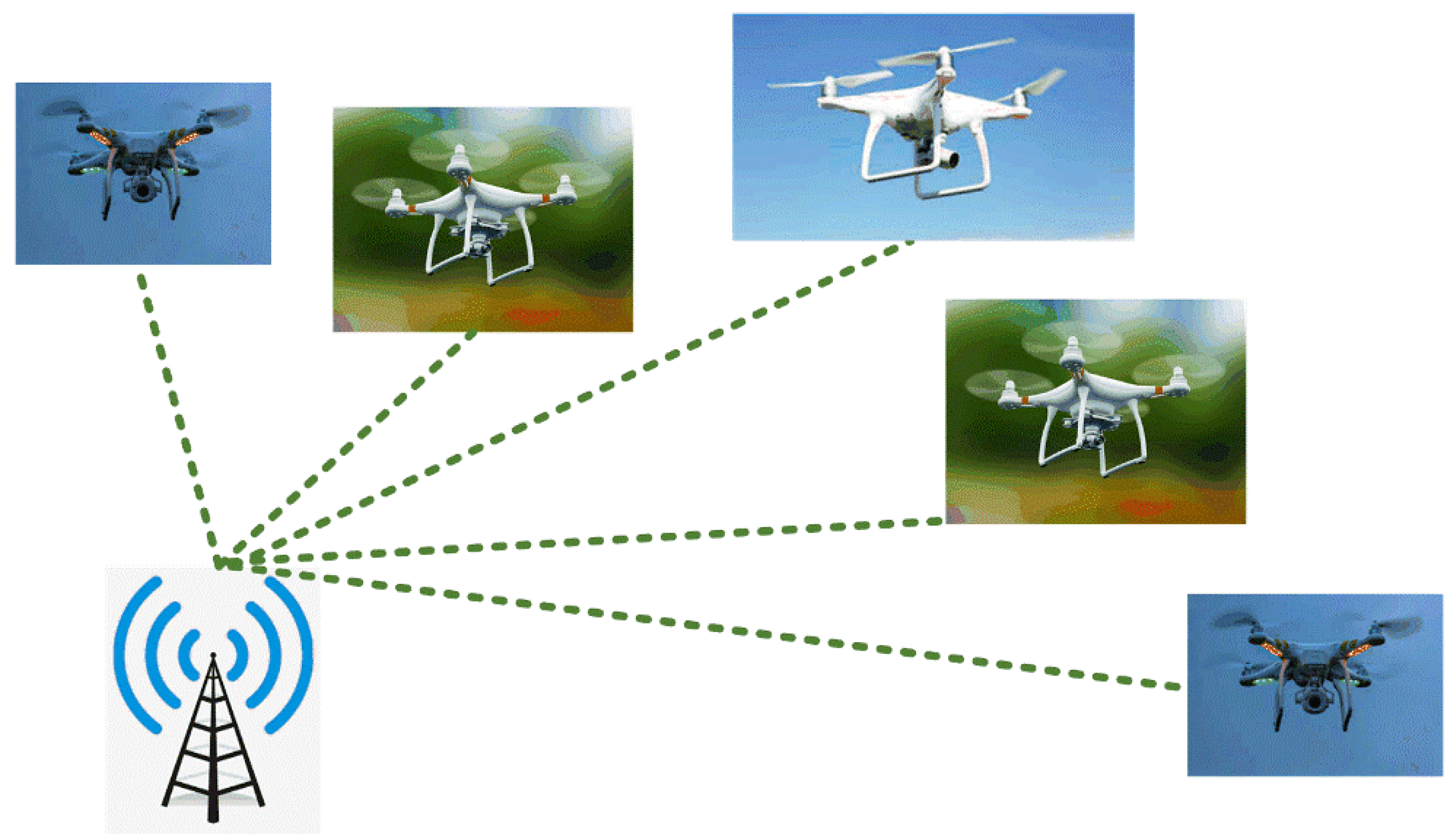
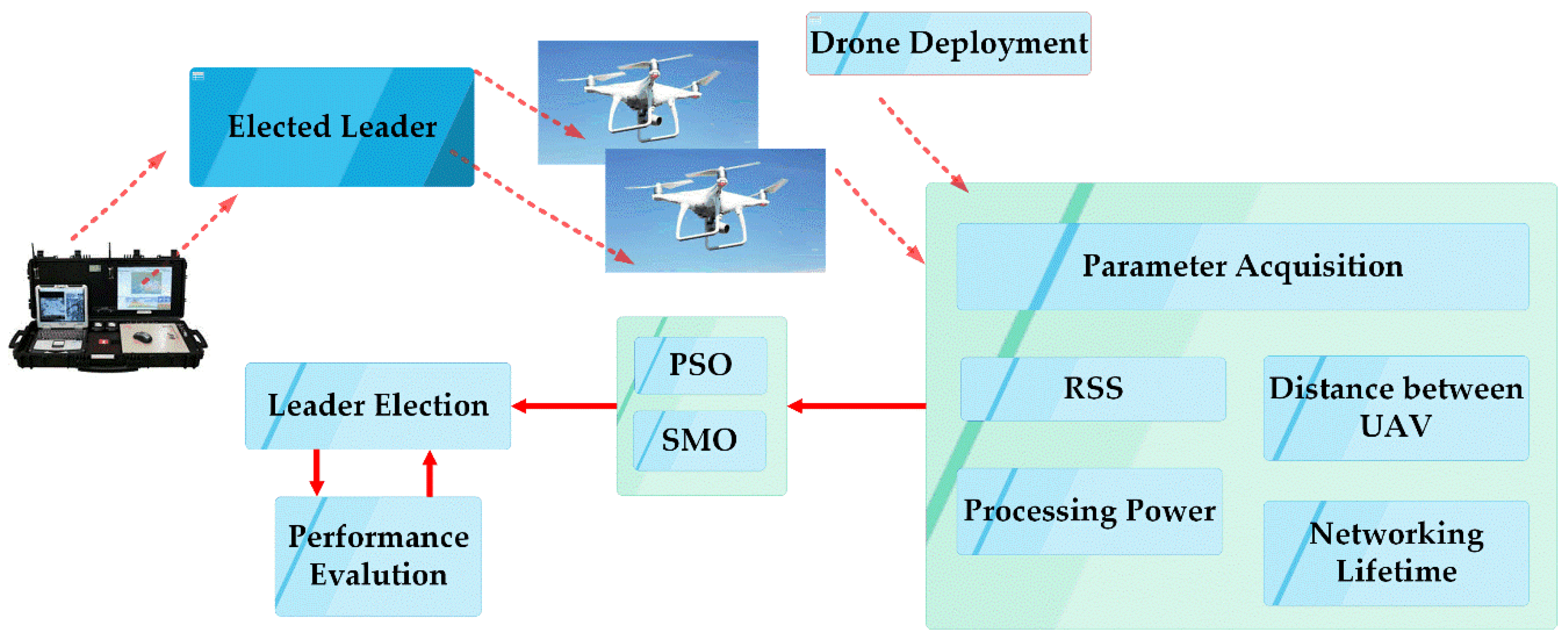
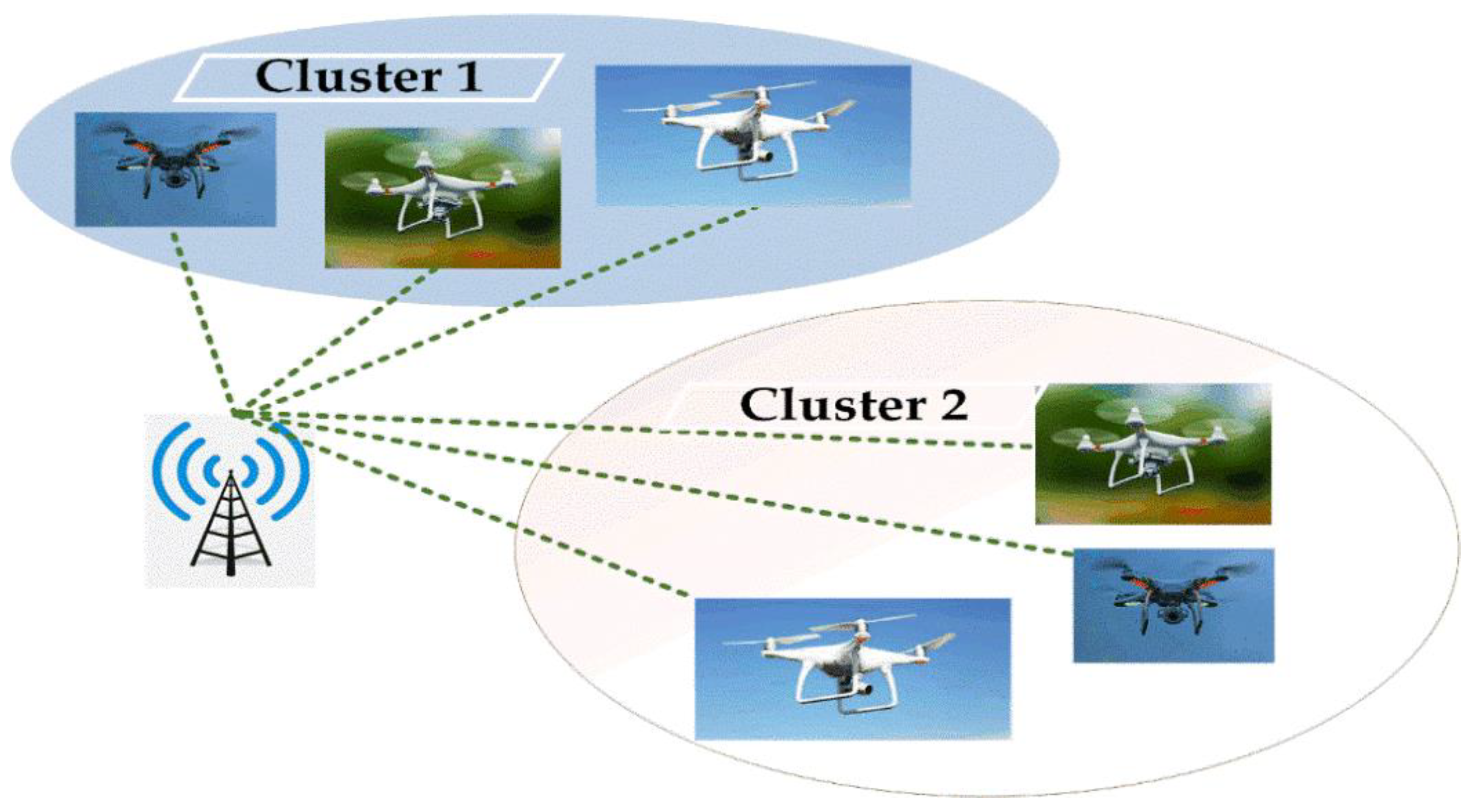
Figure 2 depicts the schematic representation of each drone communicating with the base station. Leader election and cluster formation are done based on the bio-inspired optimizations such as PSO and SMO, respectively.
Researchers have proposed many bio-inspired optimization algorithms to solve complex computational problems. They are stimulated or inspired by the biological behavior of animals or birds. The optimal solution is found by exploring and exploiting the search spaces using different methods [
1]. The widely used algorithms include Particle Swarm Optimization, Grey Wolf Optimization, Ant Colony Optimization, Artificial Bee Optimization, and so on [
9,
10,
11,
12]. Particle Swarm Optimization (PSO) proposed by Eberhart and Kennedy, which is derived from the study on flocking of birds or fish schooling ich behavior of animals and considers an example that a group of birds is searching for a single piece of food in a random area [
13]. Every bird does not know the location of the food particle, but it can be found out in repeated iterations. Thus, the practical strategy is to find the bird which is closest to the food. In the PSO, random particles (solutions) are first initialized, and an optimal solution is found in successive iterations [
13]. The Spider Monkey Optimization (SMO) technique uses the social behavior of spider monkeys for solving optimization problems. It is based on a fission-fusion methodology. Generally, they live in large groups of individuals. If there is a need, they separate (fission) from the group and reunite (fusion) later when needed. This method is widely used for clustering techniques [
14].
The effective utilization of battery energy is one of the most crucial factors for the operation of the drones. The battery power in the drones is used for wireless communications between the drones and to the base station, data processing, drone hovering, and various other purposes depending on the application of the drone. This requirement gives rise to the design and implementation of an energy-efficient algorithm for real-time processing of drone data. In the case of multiple drones, numerous communication and coordination challenges need to be solved. The high velocity of the drones ranging from 35 km/h to 70 km/h is another challenge because collisions can be avoided only when the obstacle avoidance algorithm is executed immediately [
15]. For this purpose, drones need to make formations according to their flying environment. The research gaps that need to be solved are:
- •
When multiple drones are deployed in the environment, communication among the drones and communication with the base station takes place.
- •
If each drone communicates separately with the base station, more energy will be consumed, and thus the lifetime of the network may decrease.
- •
When the communication between the drones fails, then collision may occur as the drones are not aware of their neighbor’s position.
Our contributions to overcome the problems above are:
- •
A cluster head CH is elected dynamically based on its current position (nearer to the base station and all other drones),residual energy (benergy), and velocity using a method based on Particle Swarm Optimization (PSO).This elected leader CH alone communicates with the base station and other drones, thereby decreasing the communication energy, which in turn extends the network lifetime.
- •
Clusters are formed using Spider Monkey Optimization (SMO) based on the proximity of the drones to each other, its connectivity to other nodes (using RSSI), and the residual energy of the drones. The clusters formed will have equal average residual energy for increasing the network lifetime furthermore.
- •
Simulation of the proposed algorithm, to compare and study its efficiency with the existing algorithm.
Our assumptions are as follows:
- •
The network model is initially considered to have homogenous drones with the same amount of residual energy, and their moving direction is random.
- •
The drones used are attached with a global positioning system(GPS) from which its position can be calculated at any instance and thereby calculating the distance traveled by it at the given period.
- •
Communication cost among the drones is considered to be high rather than the computation cost between the drones and the base station.
- •
The algorithm might not run continuously, but only when either the battery of the leader is less than 40% or when there is an extreme change in the network topology or connectivity.
- •
The drone d is initially elected as the leader at the ground level, and after some time, the leader election may take place among the clusters in the flying environment.
- •
The target for all the drones is considered to be the same. Sometimes, when multiple targets are considered, they are assumed to be nearby.
The rest of the paper is arranged as follows:
Section 2 draws a literature survey focusing on the present research works. In
Section 3, the proposed work is illustrated with necessary system architecture and mathematical modeling. The proposed BOLD algorithm is discussed in detail in this section, as well. The implementation of the proposed algorithm based on which the performance evaluation is drawn can be found in
Section 4. Finally, the study is concluded in
Section 5 with a conclusion.
2. Literature Survey
In earlier literature, motifs, as a basic unit for mission planning, were proposed by Liu, J. et al. [
15], which, was based on dynamic reconfiguration since UAV swarm communication with limited resources was difficult. Using the solution of motif-based swarm configuration, they used a multidimensional dynamic list scheduling algorithm to create a mission planning scheme. Dynamic topology has been used by Flying ad hoc networks (FANETs). However, UAV’s limited battery power and mobility cause unstable routing within the FANET. Khan minimized this issue [
16] with the aid of an optimal clustering method. The authors have suggested a bio-inspired clustering scheme for FANETs (BICSF), which combines both the glow-worm swarm optimization (GSO) and krill herd (KH) method. For optimizing the consumption of energy and the election of fixed group leader, a framework for unmanned aerial vehicle wireless sensor networks (UAV-WSN) using weighted k-means cluster and simulated annealing (WKMC-SA) was developed by Hui-Ru Cao et al. [
1]. The WKMC was used to group land WSN and assigned leaders of the group as fixed nodes to reduce the consumption of energy and retransmission rate. The SA algorithm was used to optimize the flight path planning. However, the group leaders were stationary re-election of a new leader in case of failures were not addressed by the author.
An algorithm that detects the formation of multiple UAVs was developed by Wang, Y. et al. [
17]. The algorithm used here is the Weighted Component Stitching (WCS) algorithm. Here the formation of a network was calculated using the inter UAV distance with the help of the Ultra-Wide Band (UWB) module. However, this became difficult when the network becomes sparse and noisy. The problem, as mentioned above, was solved by reliable grouping components of a graph into groups and thereby calculating the formation of more extensive and sparse networks with accuracy. Further, for tracking the formation over a while, the Kalman filter was integrated into the WCS algorithm. These algorithms were compared with existing ARAP (as rigid as possible), ASAP (as soon as possible), and SDP (semi definite programming) algorithms. The series of results showed that WCS converged much quicker than ARAP; however, complexities remained the same. Tracking simulation also proved that WCS and WCKF had better accuracy than that of the existing approaches. A method that is based on a distributed consensus-based algorithm which combines the sensing capabilities was proposed by Tao Feng et al. [
18]. Cluster heads communicate within the cluster or with cluster heads of other clusters using frame relay. Homogeneous UAV clusters have the same communication distances and capacities. The above-mentioned problem was simplified by assuming the capacity will not change with respect to its location and remains constant for all directions. This method gives an extensive knowledge about the state transitions of UAVs and also improves the coordinated control of UAV cluster. The feasibility of the consensus-based algorithm was performed by repeated simulations and proves that the algorithm is scalable and adaptable.
Spider Monkey Optimization (SMO) is an algorithm inspired by the social Fission-Fusion (FFS) structure of spider monkeys during their foraging activity. Due to its high efficiency, the algorithm was used to solve complex problems. [
14]. Spider monkey optimization has been applied in various fields like big data [
19], image processing [
20], cluster routing protocols for WSNs. In Reference [
21], research was carried out to understand the mechanism of SMO in WSN route optimization by implementing a mathematical model of its behavioral patterns based on SMO-C. It transmits the data from the clusters to the base station via the optimal path. Furthermore, the SMO-C is considered to be better than the conventional routing protocols in terms of less energy usage and better network service efficiency. A Hybrid Particle Swarm Optimization and Genetic Algorithm (HPSOGA), which solved the multi-UAV formation reconfiguration problem, was proposed by Duan et al. [
22]. This new approach, when combined with the Particle Swarm Optimization (PSO) and Genetic Algorithm (GA), finds the time-optimal solutions. The HPSOGA was compared with the simple PSO algorithm, and the results showed that the former is better than the later in solving both multi-UAV formation reconfiguration problems and finding time-optimal solutions under complicated environments.
PSO-C, an energy-aware cluster head election using the PSO algorithm, was proposed by Latiff et al. [
23]. This algorithm optimized the network energy consumption using intra-cluster distance and ratio of initial energy to the total energy of the network. However, in some cases, non-cluster heads were assigned as cluster heads in the clusters formed, which decreased the lifetime of the network due to insufficient energy consumption, and sink distance was not used in fitness computation. The PSO-C algorithm was compared with LEACH (Low Energy Adaptive ClusteringHierarchy) and LEACH-C (Low Energy Adaptive Clustering Hierarchy-cluster based protocol). J. Sanchez-Garcia et al. [
24] proposed a novel dynamic Particle Swarm Optimization for UAV networks (dPSO-U). This dPSO-U was for a path optimization in the rescue operations of the given disaster situation. It was compared to the optimal trajectory planning algorithm, and the results were found to be more efficient than that.
Particle Swarm Optimization is a swarm intelligence algorithm based on birds flocking behavior. Let N
P be the number of particles in PSO. A particle P
i has position
Xi and velocity
Vi. The fitness function is used to evaluate each particle for checking the quality of the solution. Initially, each particle is assigned with a random position and velocity values. Each particle computes its own best called
Pbesti and global best called
Gbest for every iteration. To reach the global best solution, it uses its personal and global best to update the velocity
Vi and position
Xi using the following Equations (1) and (2).
where
w is the inertia weight,
c1,
c2 are acceleration coefficients and
are randomly generated values.
After getting a new updated position, the particle evaluates the fitness function and updates Pbesti as well as Gbest from Equations (3) and (4).
Stochastic optimization was proposed by modeling the social behavior of spider monkeys foraging. Spider monkeys have been categorized as fission-fusion social structure based animals. The animals which follow fission-fusion social systems, initially work in a large group and based on need after some time, they divide themselves into smaller groups led by an adult female for foraging.
Initially, the SM group starts food foraging and approximates their own distance from the food. Next, based on the distance from the foods, group members update their positions and again evaluate the distance from the food sources. Furthermore, in the third step, the local leader updates its best position within the group and if the position is not updated for a specified number of times then all members of that group start searching for the food in different directions. Finally, in the fourth step, global leader, updates its best-ever position and in case of stagnation, it splits the group into smaller size subgroups. All the four steps mentioned aforesaid, are continuously executed until the desired output is achieved. The population initialization, local leader election and global leader election are given by Equations (5)–(7) respectively.
where
, is
in the
direction, range of
v between 0 to 1;
are minimum and maximum bounds.
is the new location of spm; and are the local and global leaders of the population.
From the literature, it has been observed that in recent years, the multiple drones are widely used in many applications, but still, some significant aspects like clustering, cluster head election are not considered when multiple drones are deployed for single target events in the environment [
25,
26,
27,
28]. The re-election of cluster heads in case of failures was also not considered. Network lifetime is a significant parameter in any ad-hoc and mobile networks when a substantial amount of nodes in the network dies; there is a high probability of network disconnection, which reduces network lifetime. Another challenge in the highly dynamic networks like UAV is topology control; when a node moves far away from the network coverage, it will affect the topology and the process of achieving the target. The main idea of our proposed algorithm is the election of cluster head and formation of clusters, a hierarchical topology network, which can minimize the energy consumption and maximize the network lifetime. In the hierarchical clustering approach, the nodes are grouped into clusters or again as sub-clusters, a cluster head(CH) is elected. The CH is responsible for the coordination of the cluster members(CM), intra-cluster, and inter-cluster communications. The clustering approach minimizes the communication overhead eliminates the communication between CMs and the base station(BS), which will extend the network lifetime, increase network scalability, and also reduce routing overhead. Later sections will provide a solution to these problems.
5. Conclusions
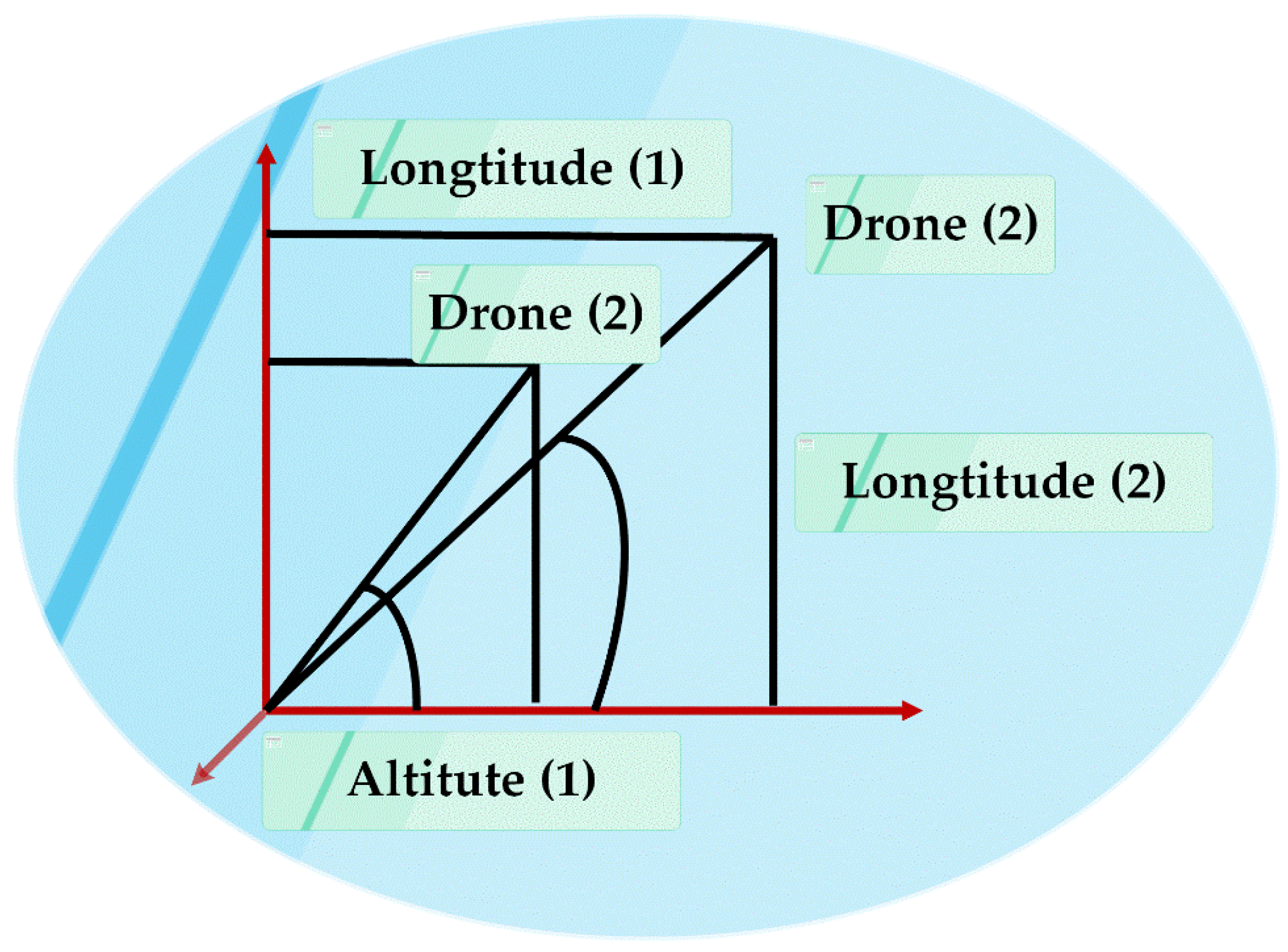
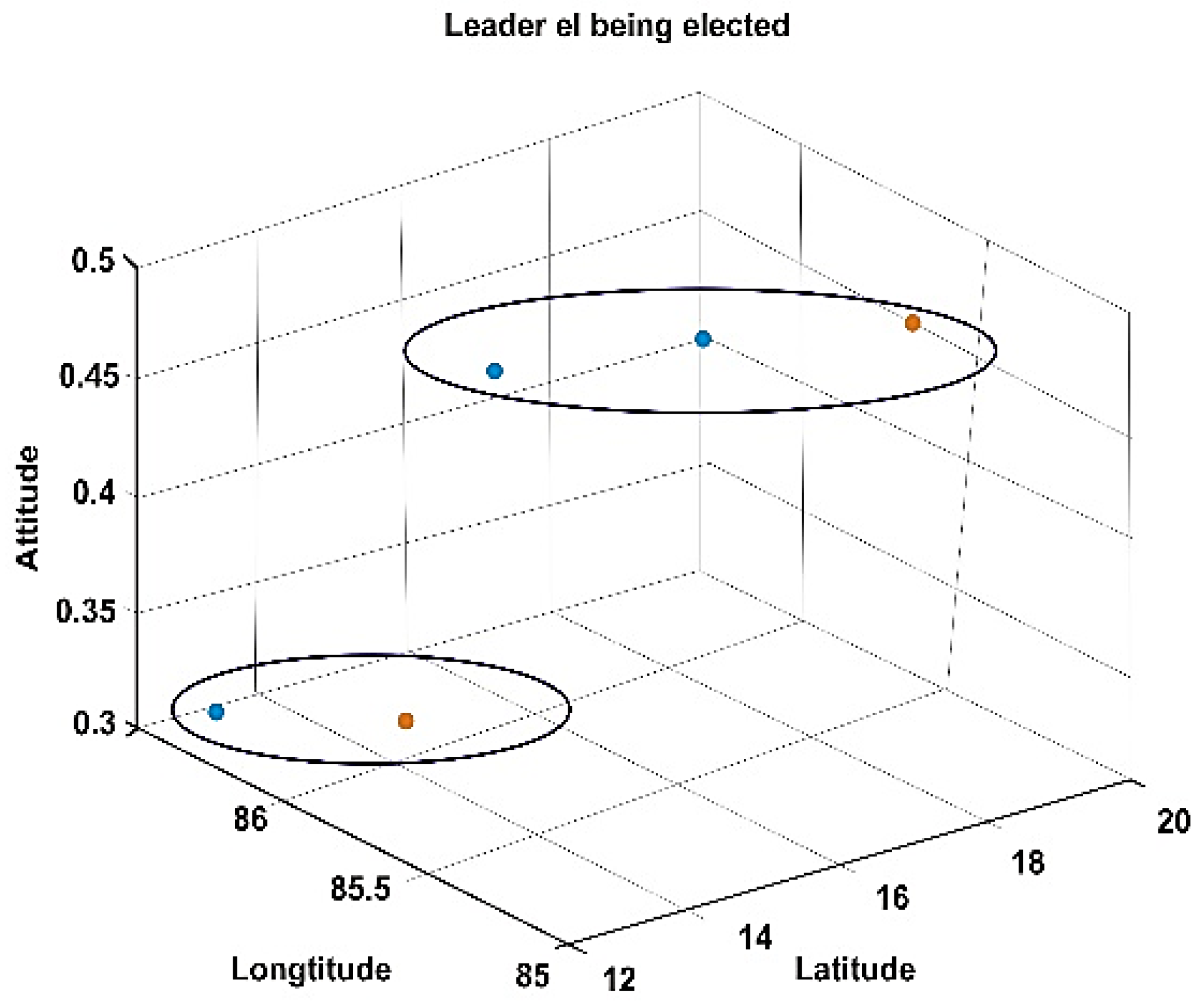
In this paper, an efficient approach has been proposed for leader election among multiple drones using bio-inspired optimization techniques. The stimulation has been performed considering the three-dimensional position (latitude, longitude, and altitude) of the drones rather than the two-dimensional structure, as proposed in earlier research. An enhanced algorithm for the election of the efficient cluster head and for the formation of clusters called the BOLD algorithm has been presented. The BOLD algorithm elects the CH among multi drones based on specific parameters such as distance and residual energy at different time periods. As per the mission requirement, the drones divide themselves into clusters based on their residual energy. The cluster is divided in such a manner that average residual energy for each cluster is equal. The leader election also takes place in these clusters.
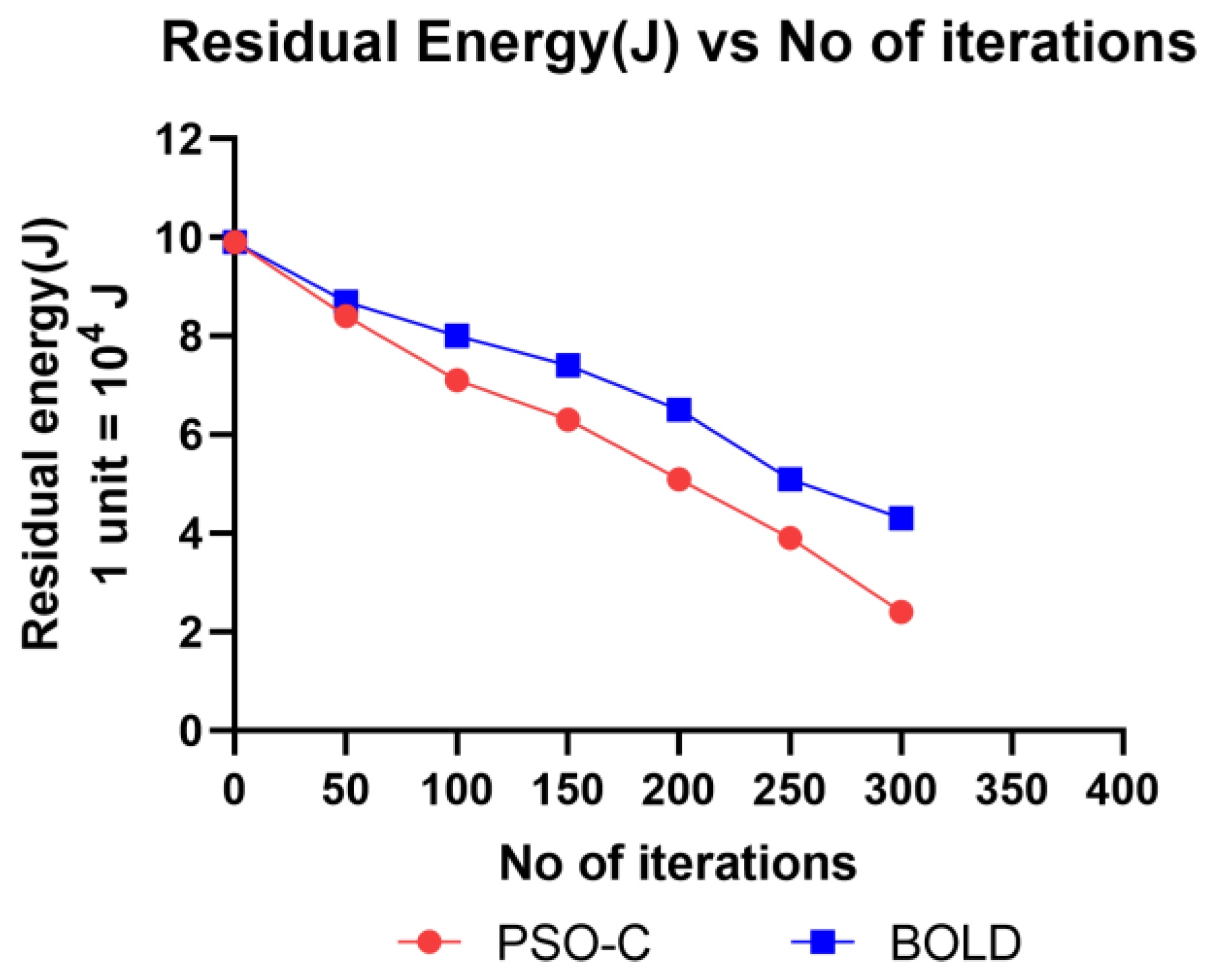
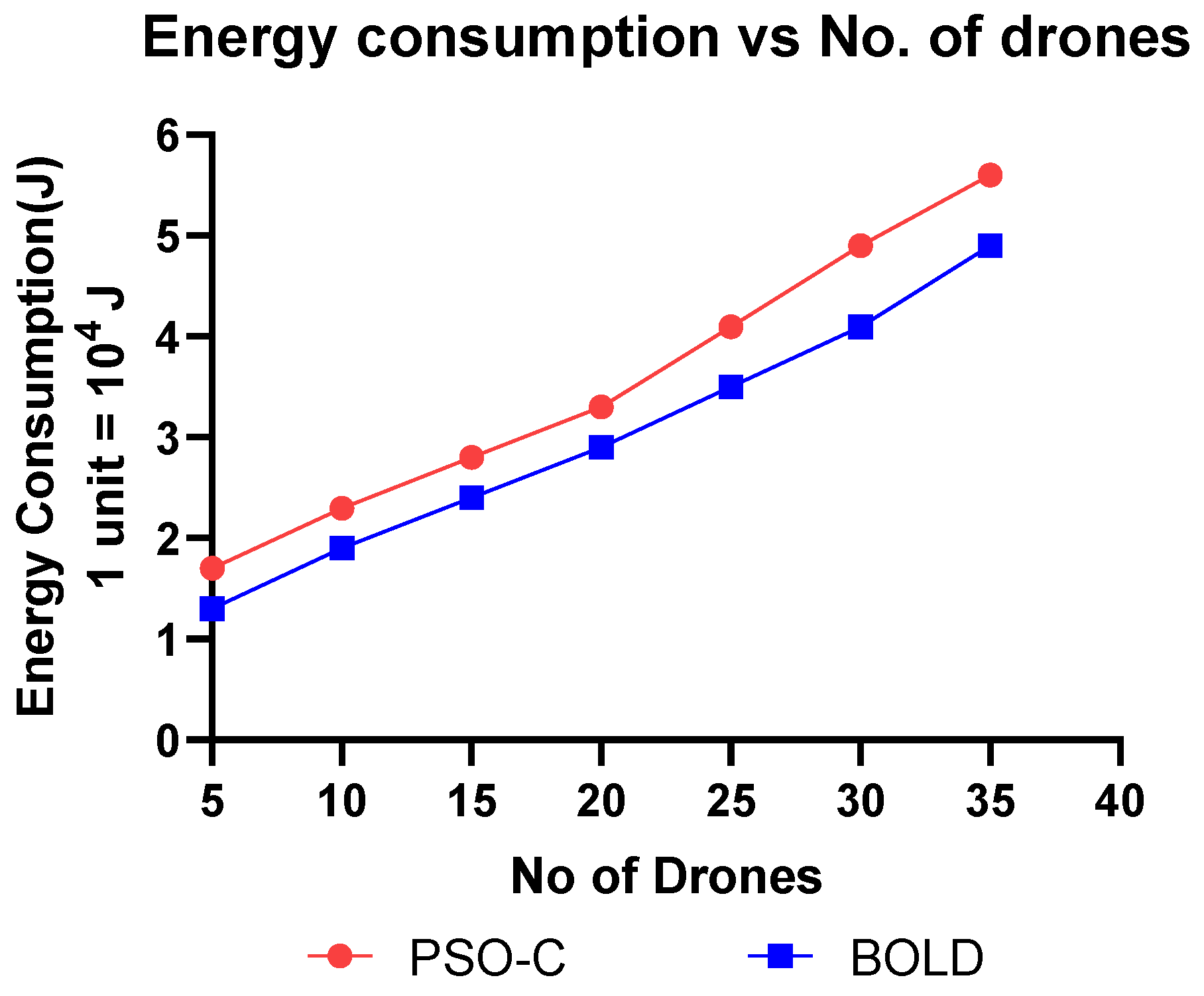
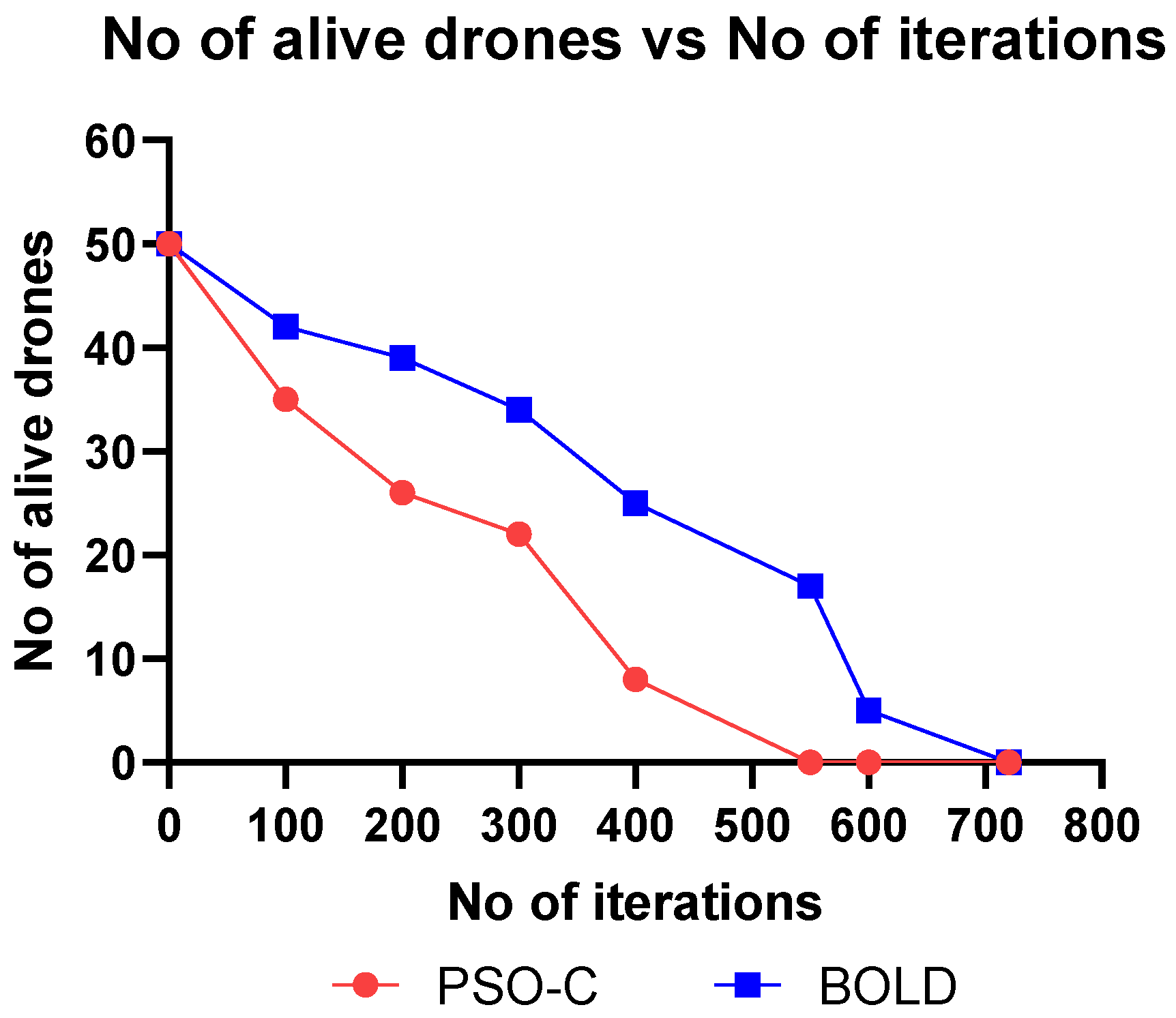
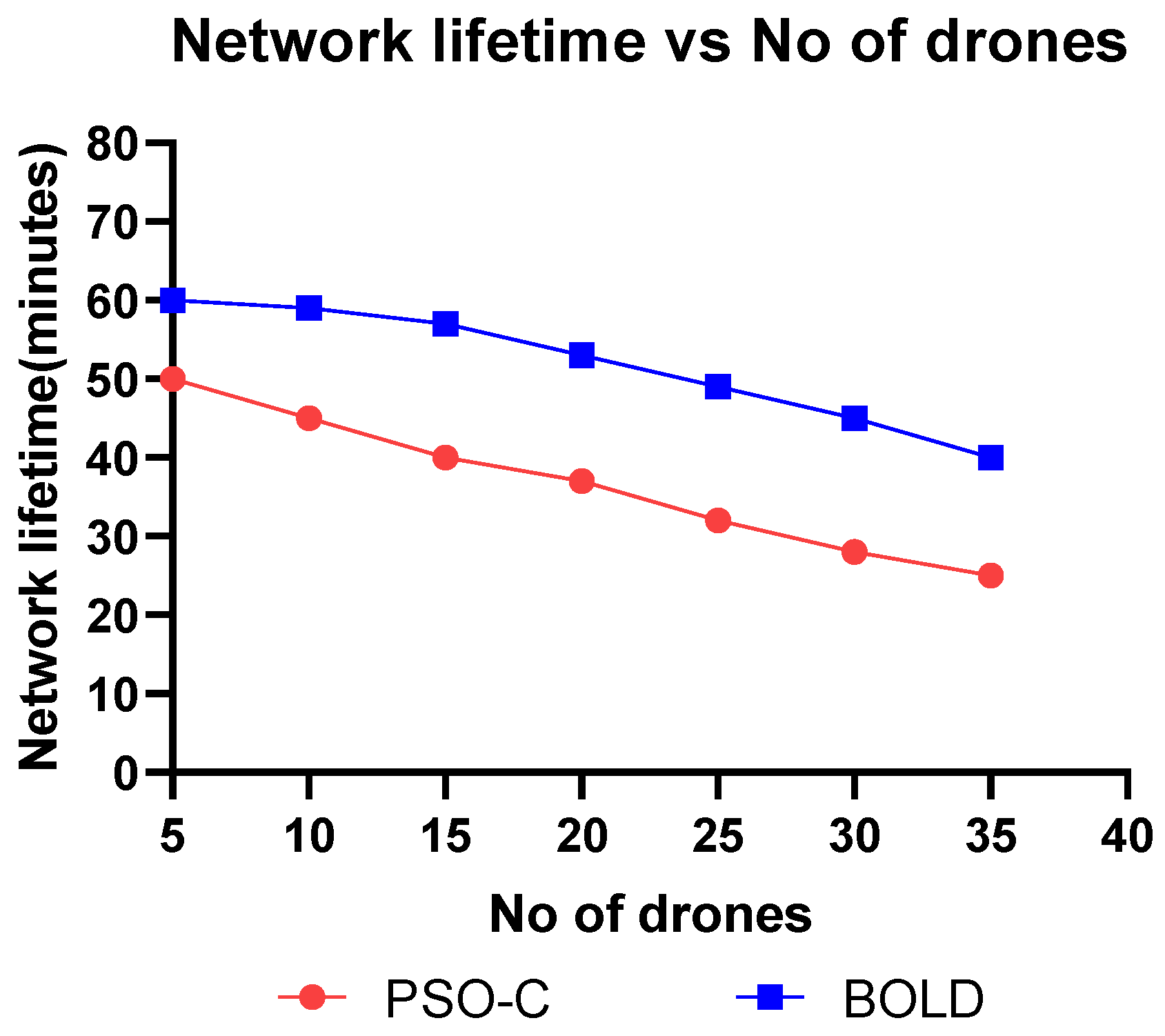
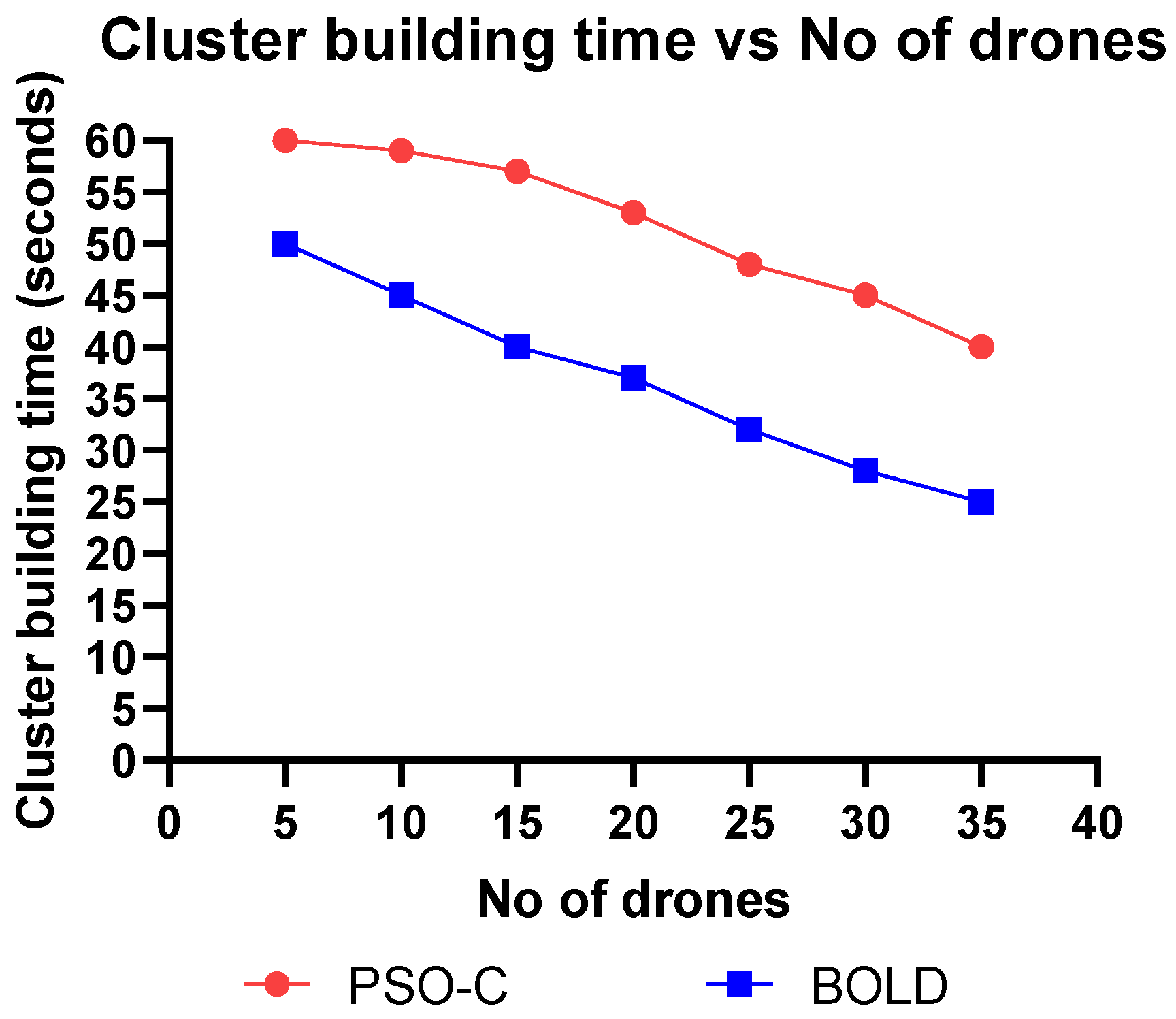
The PSO-C algorithm, where the fitness value is based only on the residual energy has been compared with the BOLD algorithm, where the fitness value has been calculated based on both the residual energy and the distance between the drones, and the results that we have found from this study depict that the proposed BOLD algorithm is more efficient than the former in terms of extending the network lifetime by reducing communication energy consumption.
In the future, the transmission range and transmission frequency should be considered when the drones are communicating with each other. It will play a vital role in the election of the leader since, if the transmission range is very less or very high, it may lead to inefficient network communication. Moreover, the algorithm can be tested in the real-world environment with the help of drone simulators like X-PLANE.



 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}