An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas



Abstract
1. Introduction
2. Online SBAS Service Concept for Safe Integration of Drones in Urban Airspace
2.1. SBAS for PBN Operation
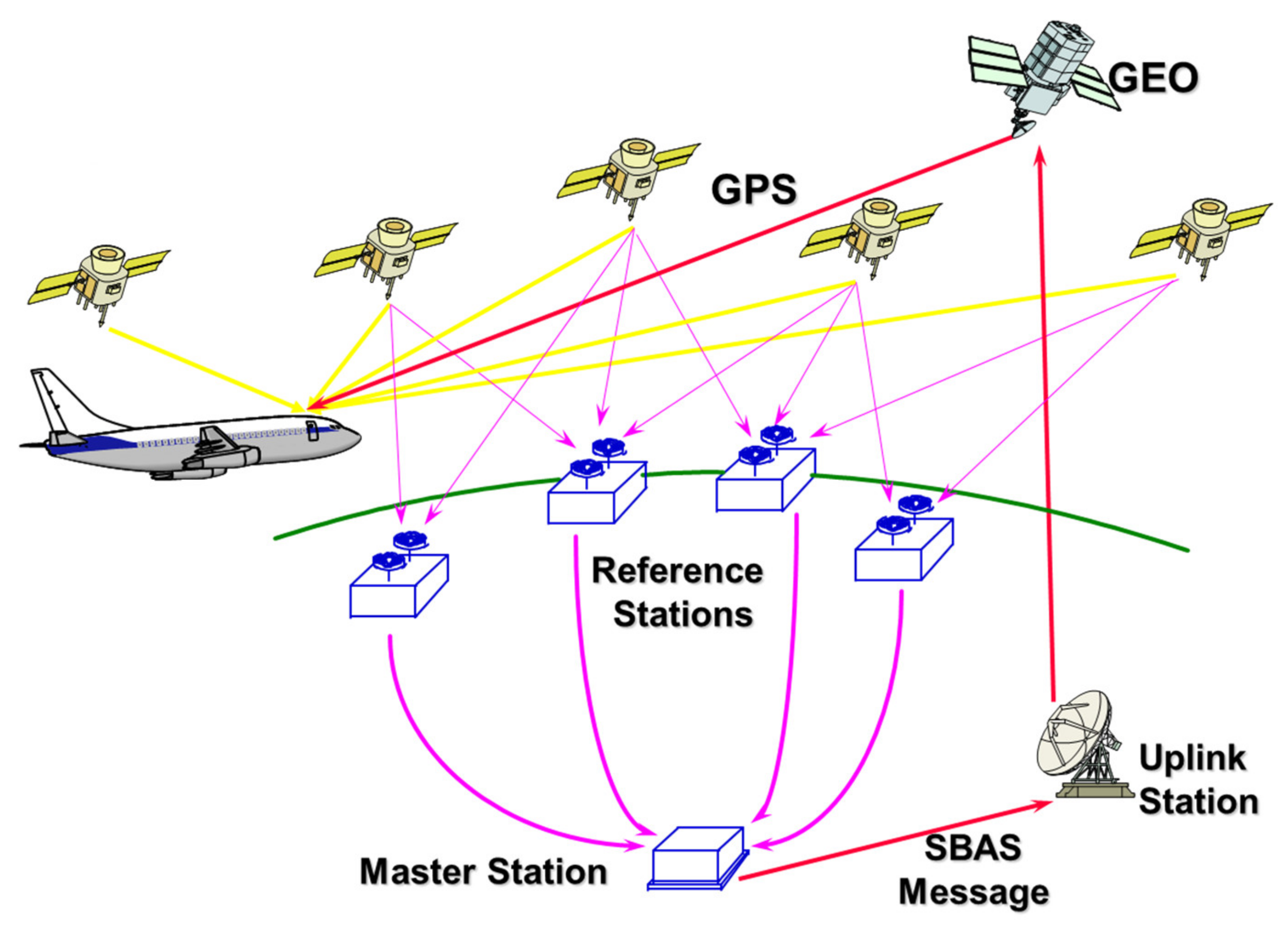
2.1.1. SBAS Architecture and Segments
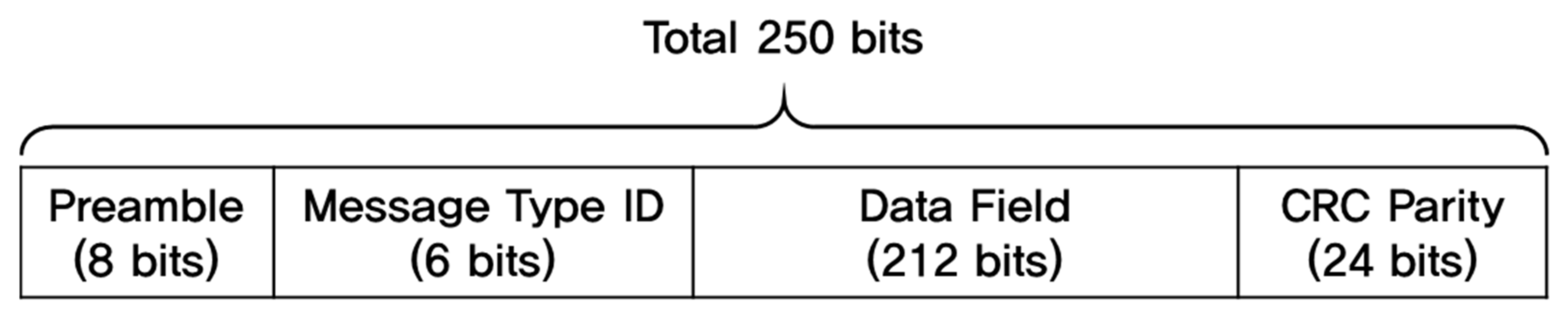
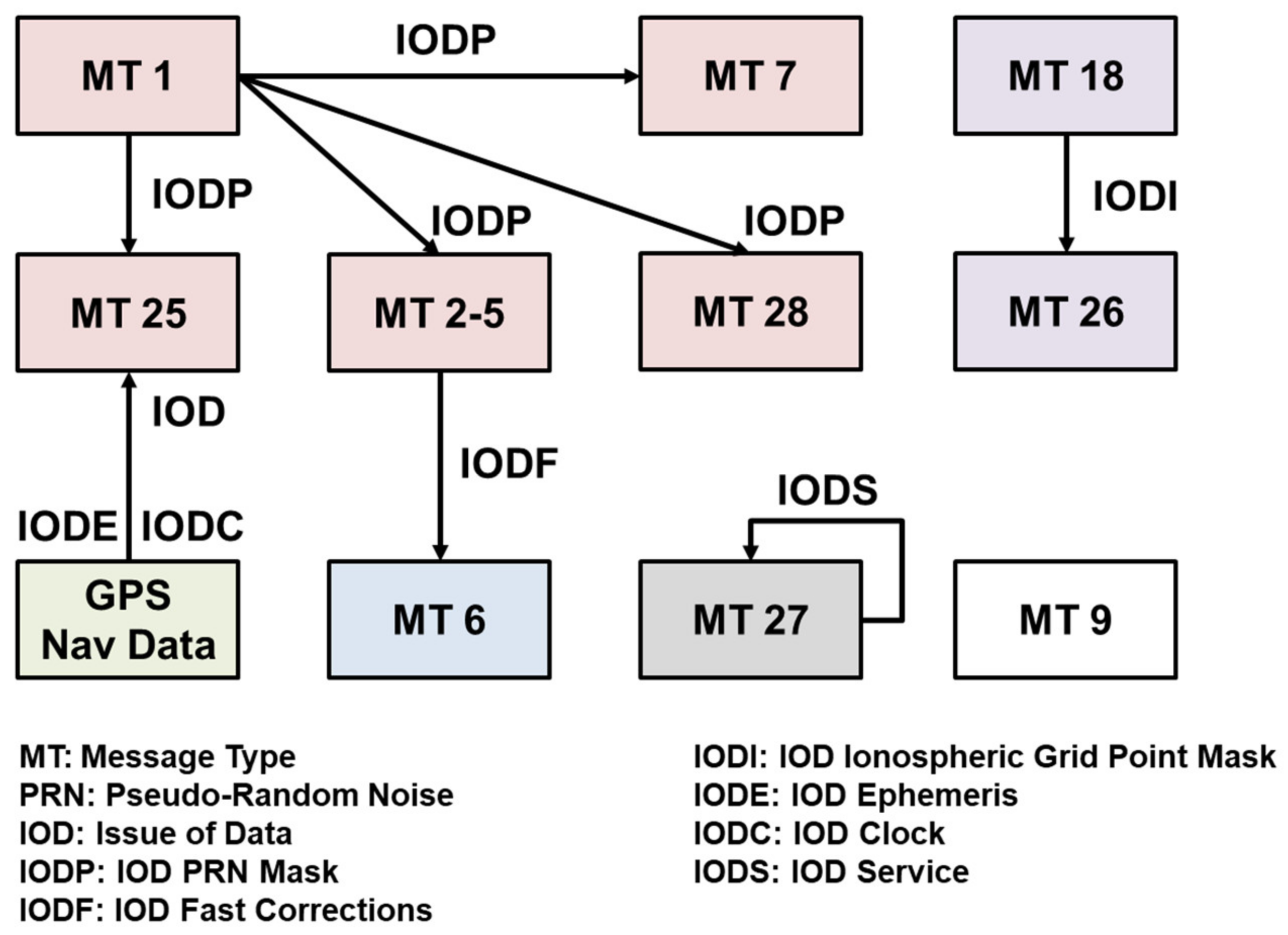
2.1.2. SBAS Message Format
2.1.3. SBAS Benefits in Drone Operations
2.1.4. SBAS Drawbacks in Drone Operations
2.2. Necessity of Online SBAS to Integrate Drones into Airspace
3. Strategy to Enable Online SBAS Service for Drone Operation
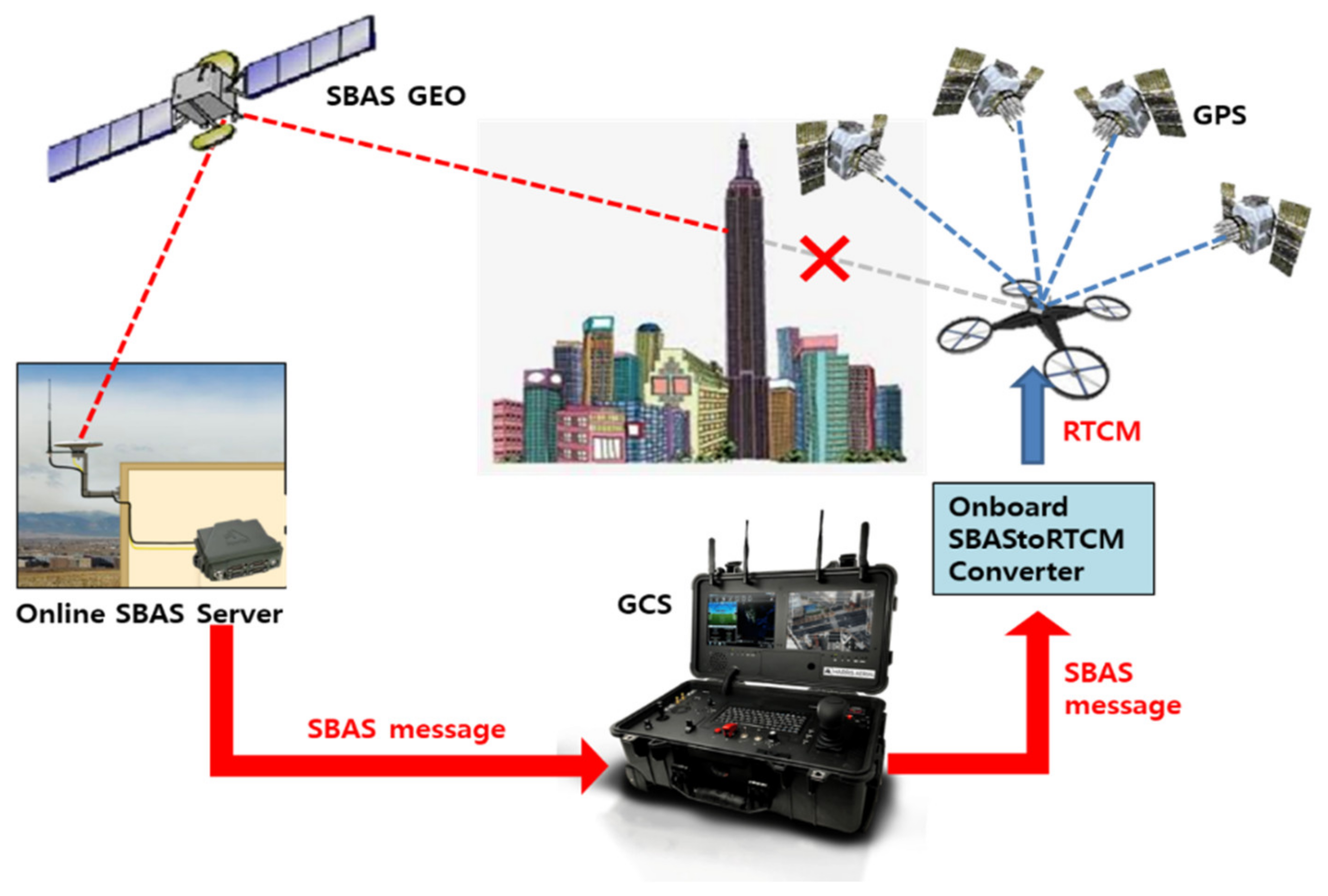
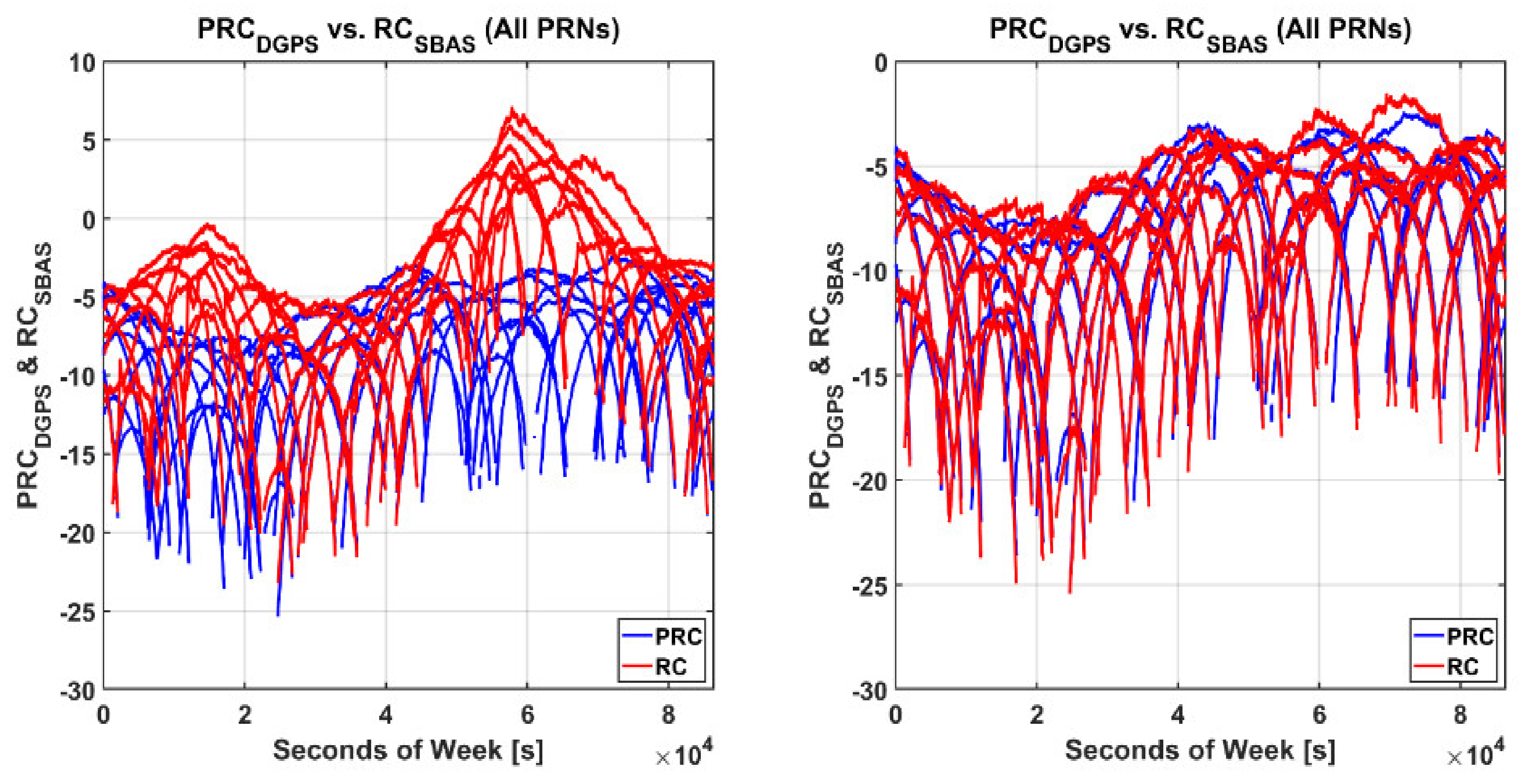
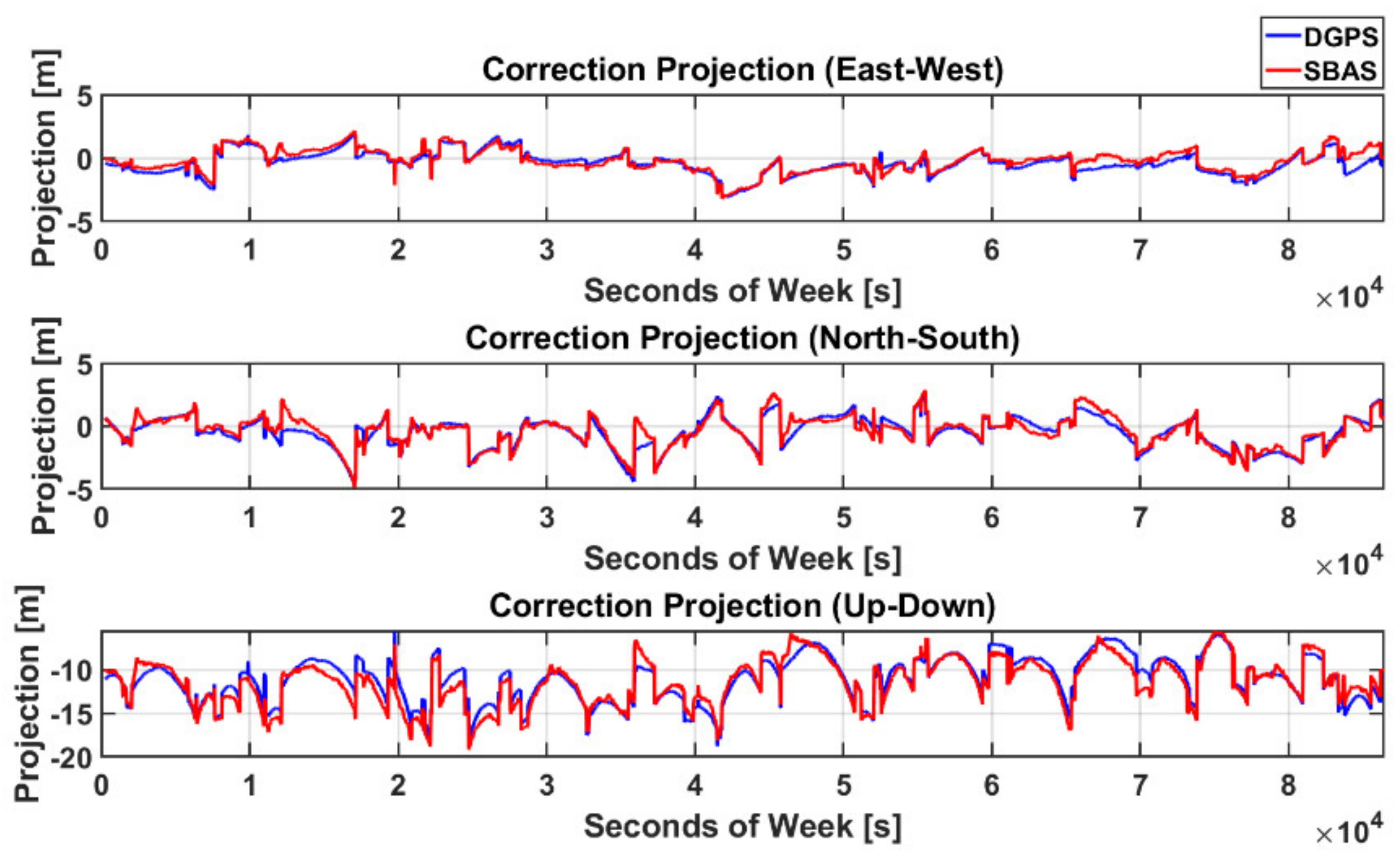
3.1. Converting the SBAS for Radio Technical Commission for Maritime Services (RTCM) Correction
3.2. Calculating and Providing Protection Levels of Drones
3.3. Modifications of the Ground Facility to Shorten SBAS Initialization Time
4. Field Test Results
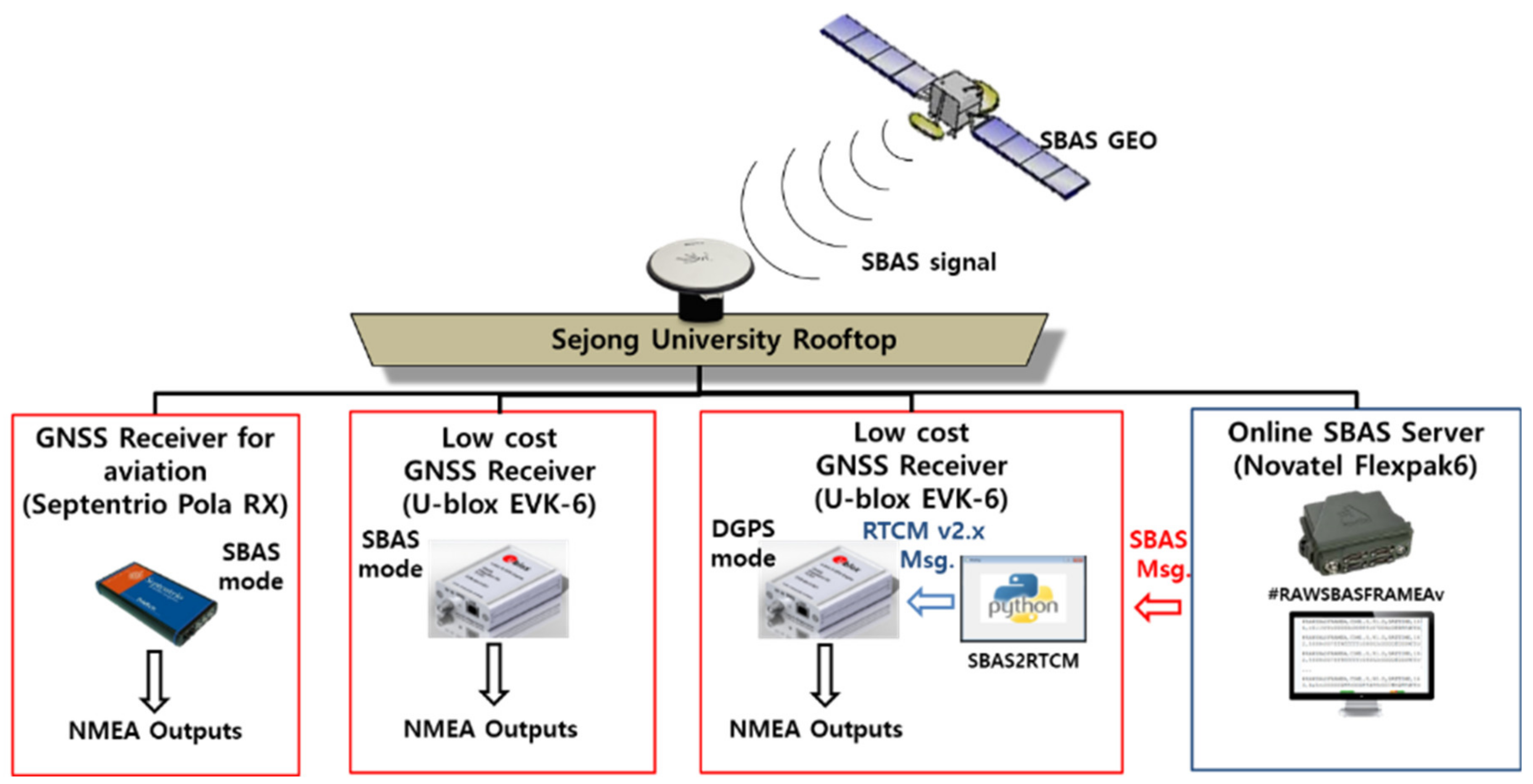
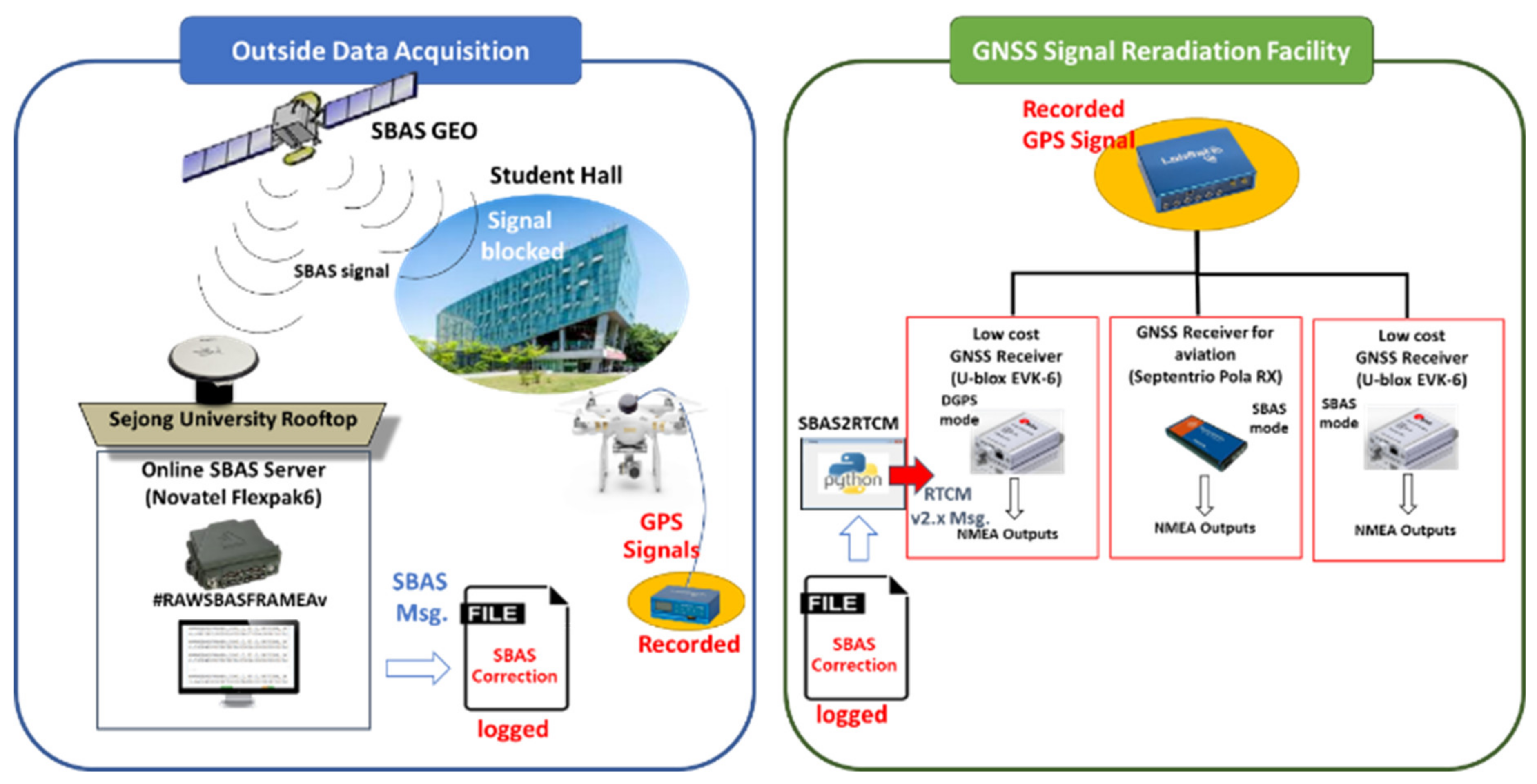
4.1. System Configuration
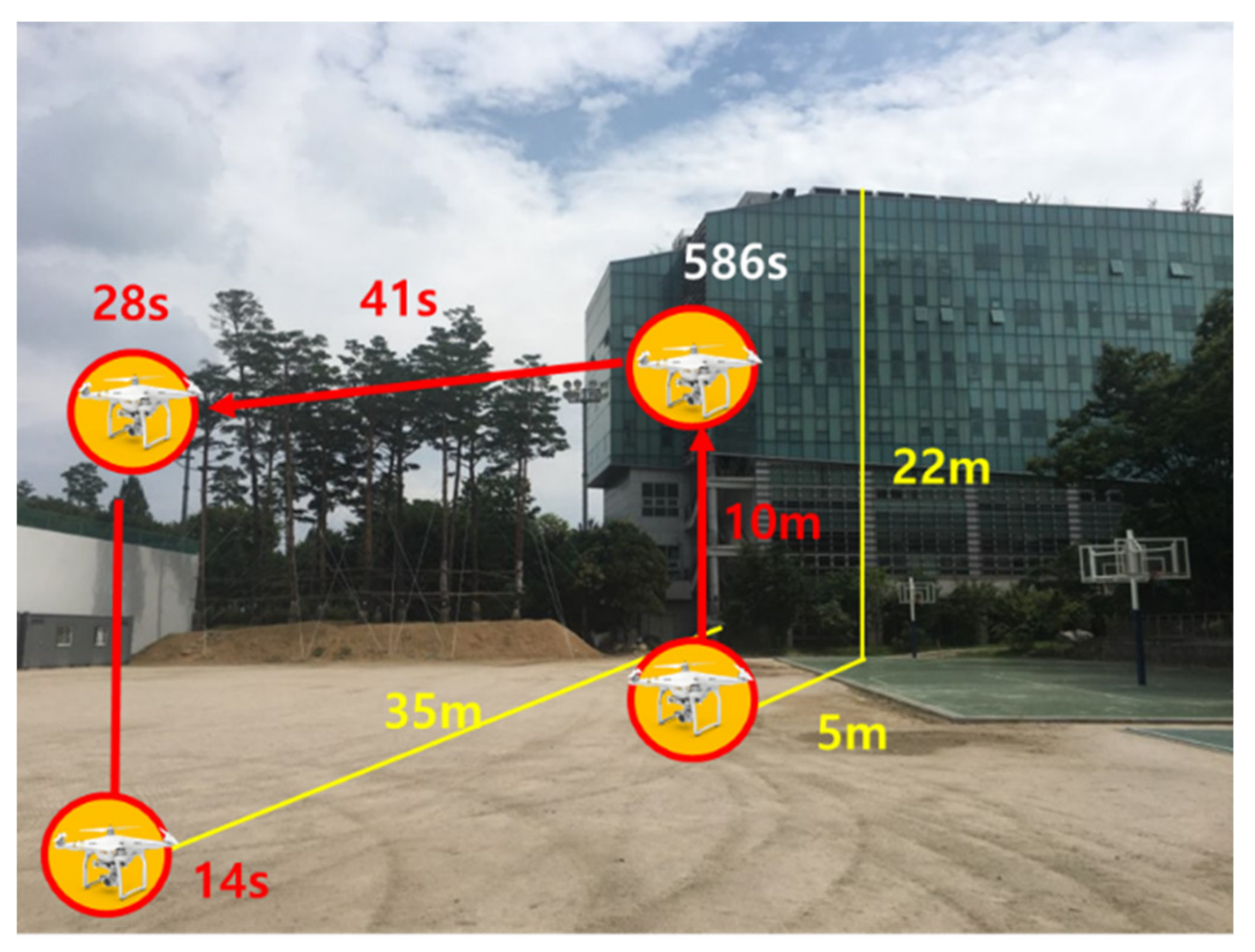
4.2. Dynamic Test Scenario
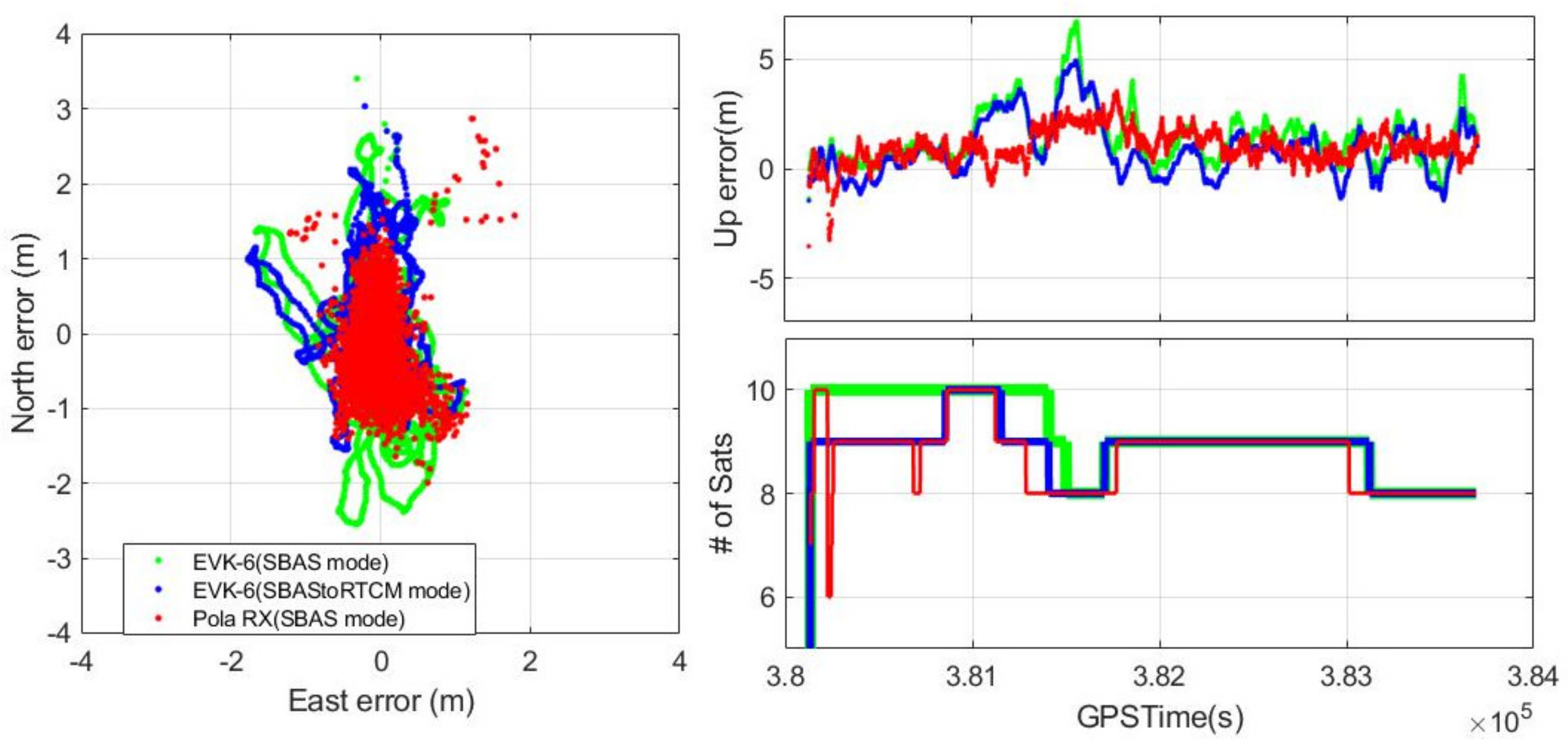
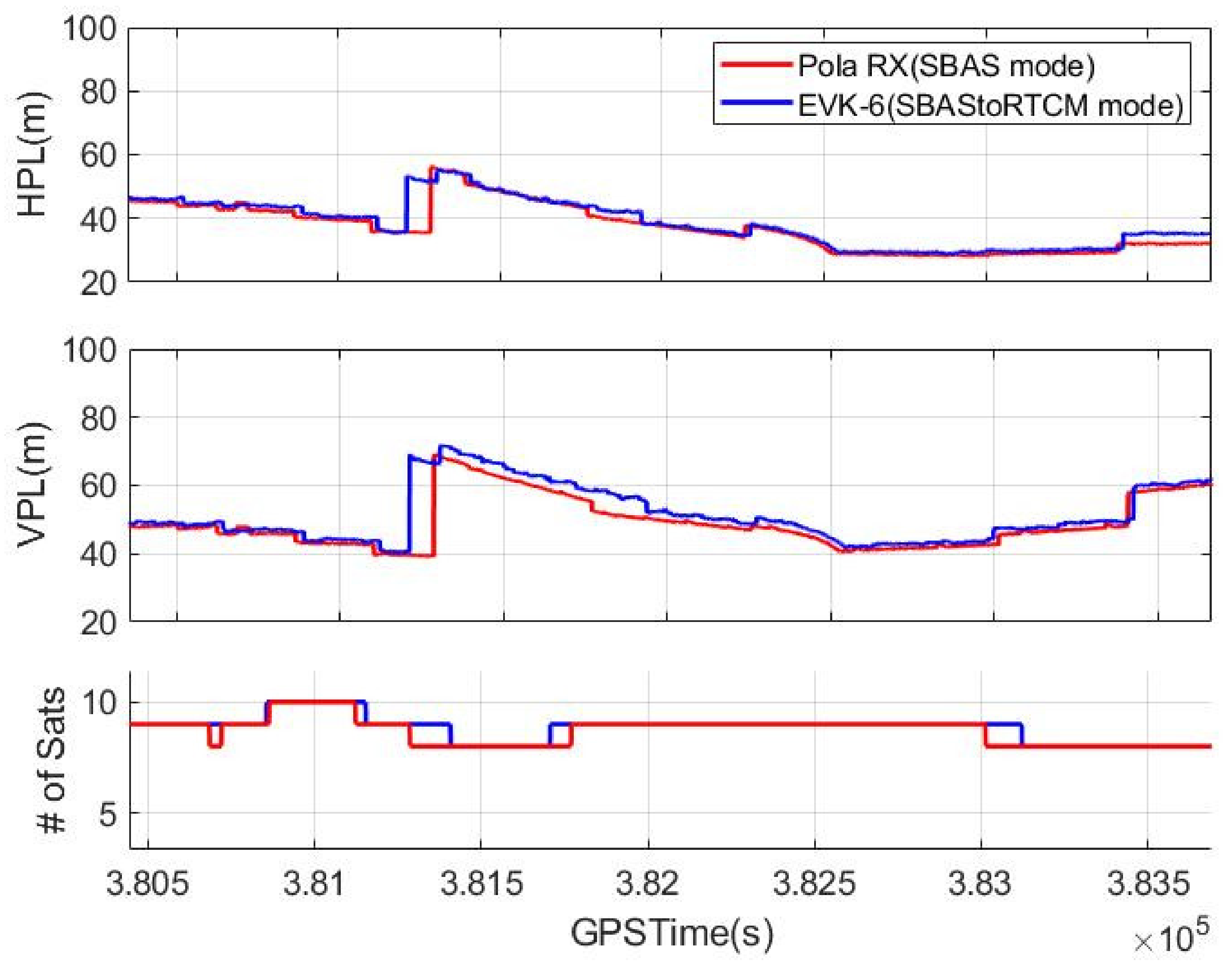
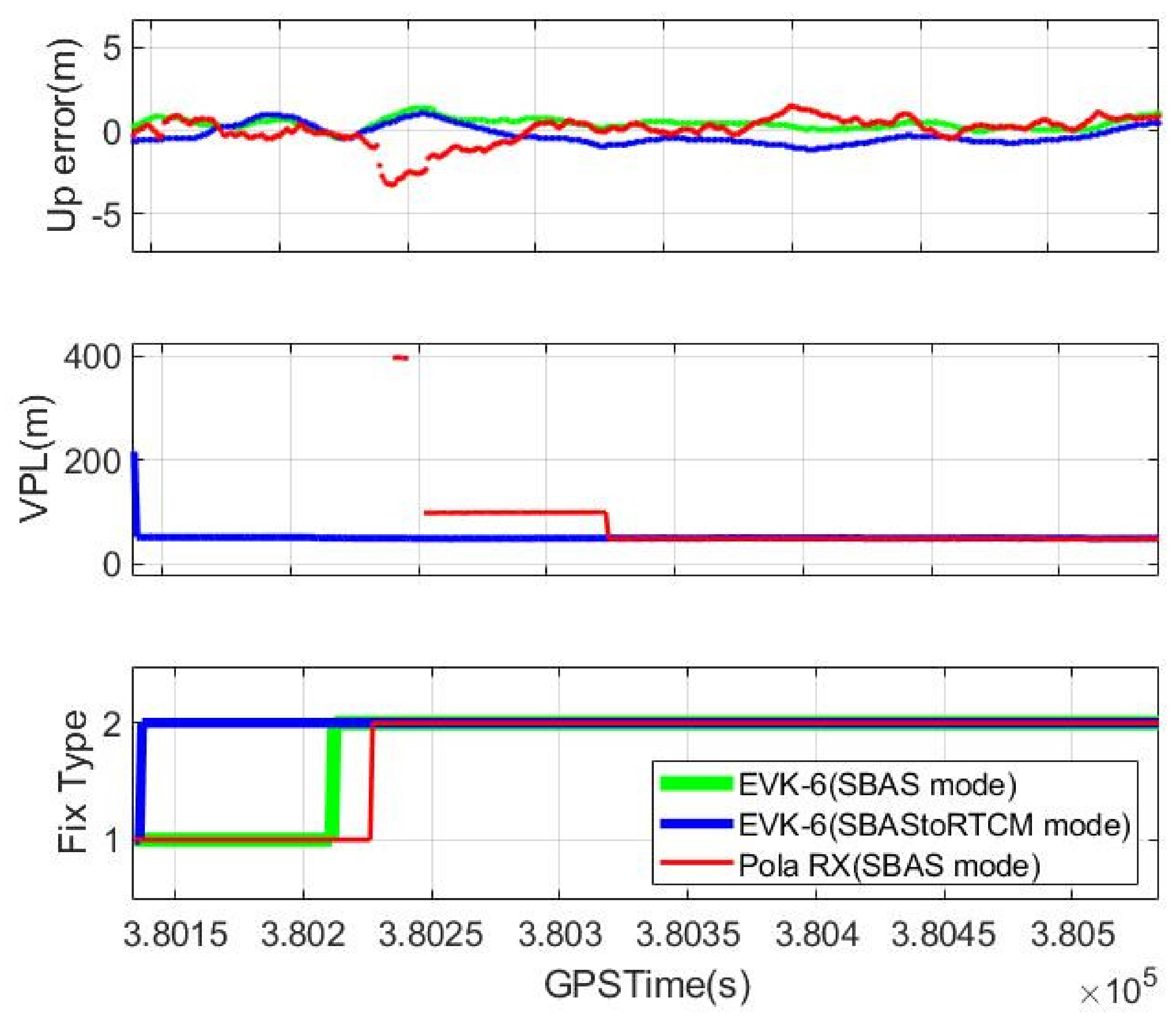
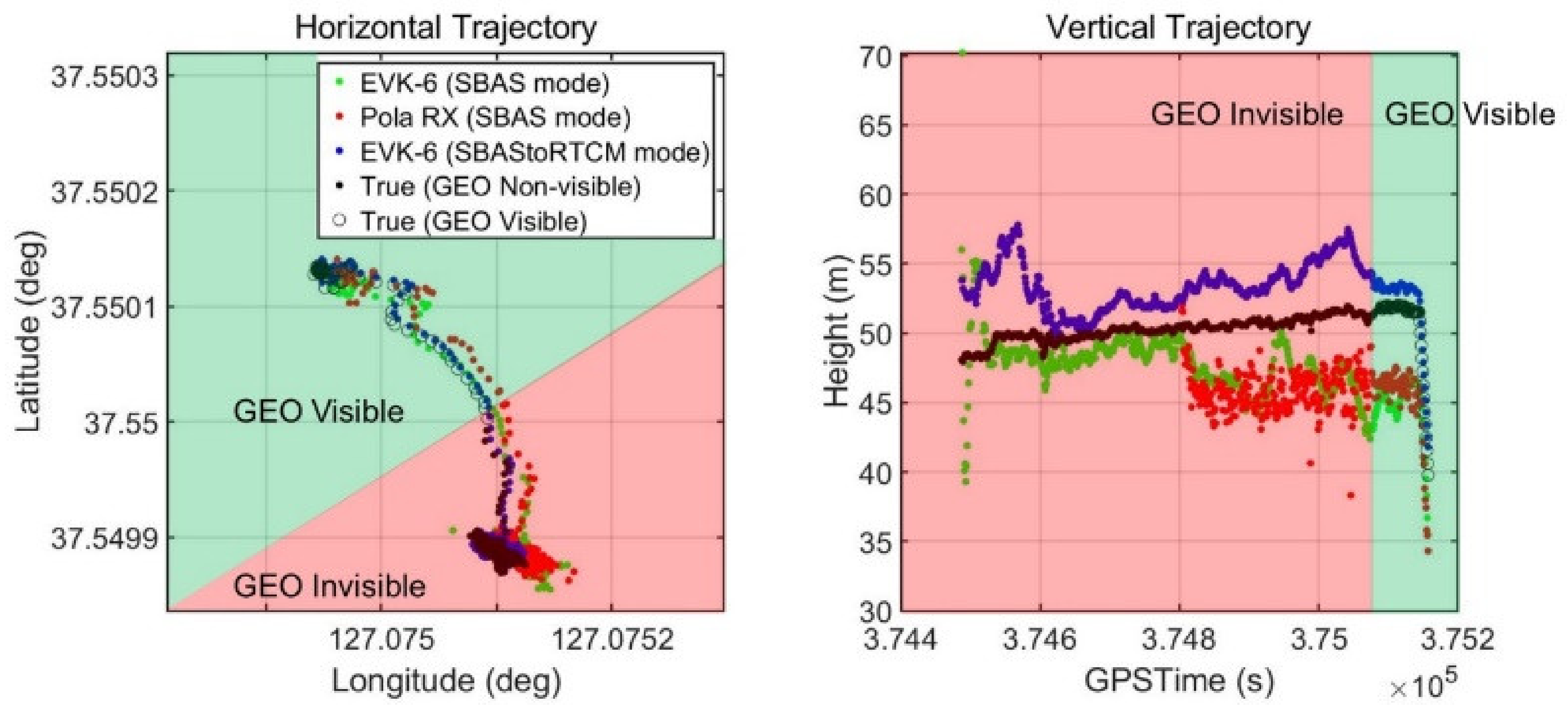
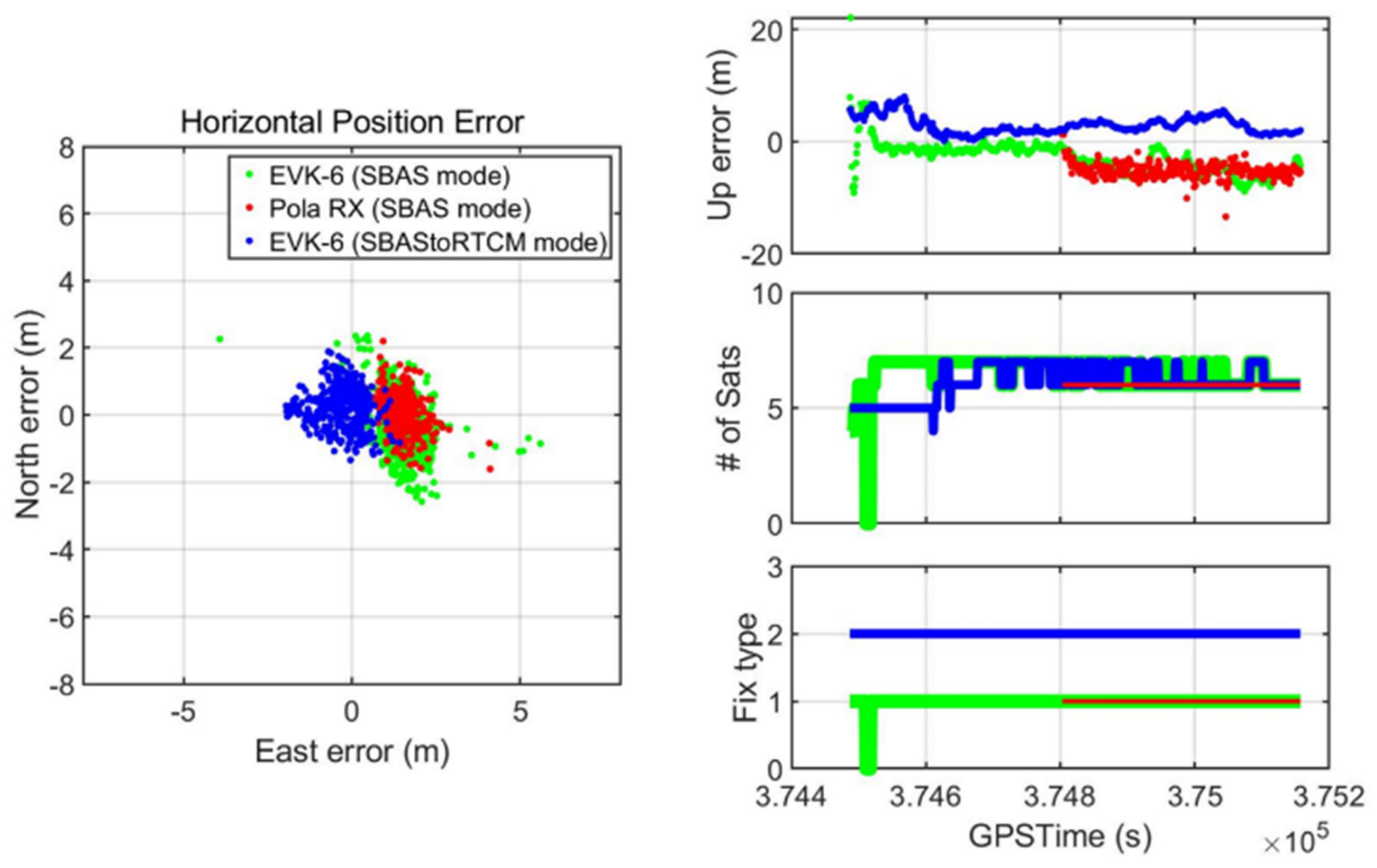
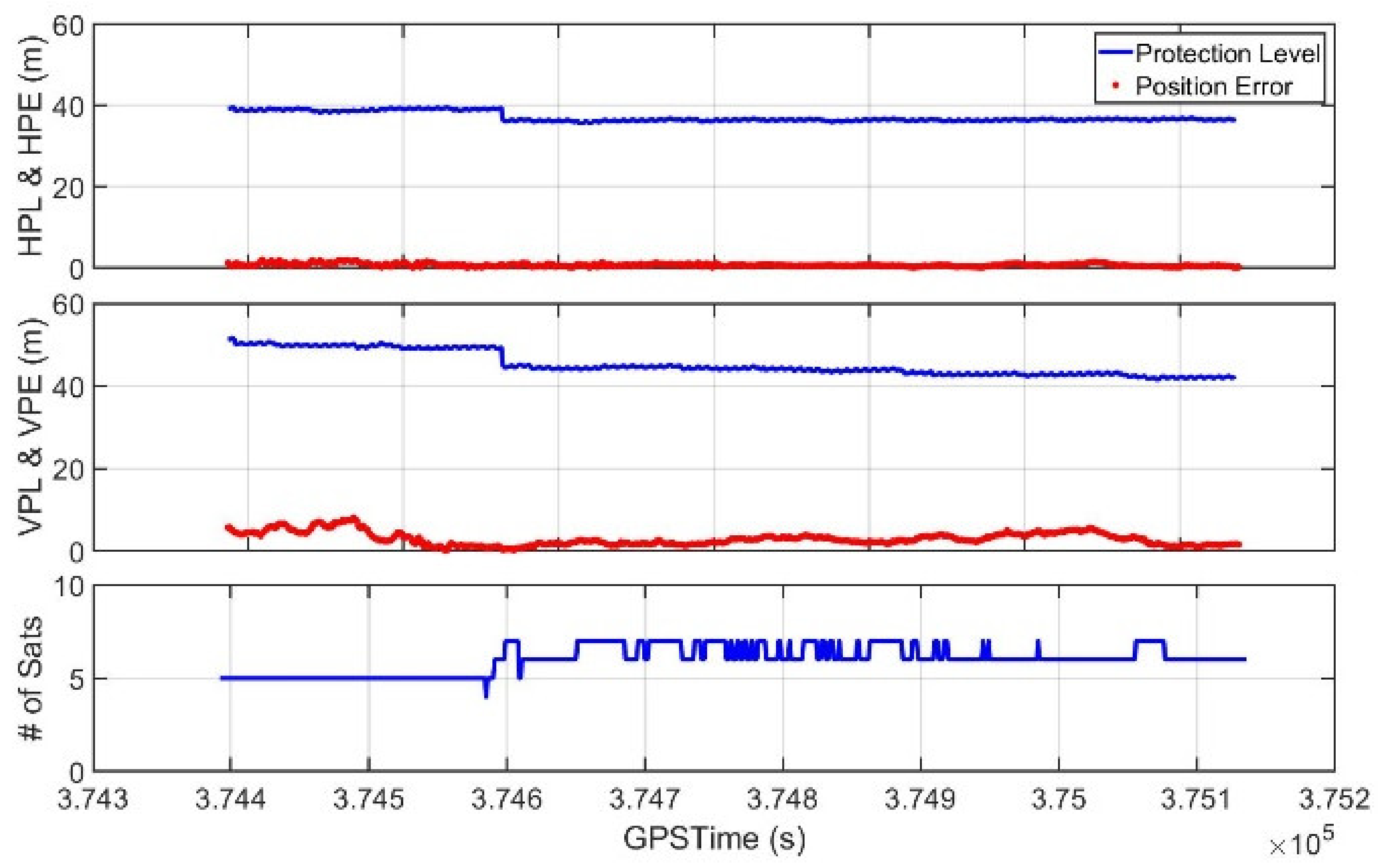
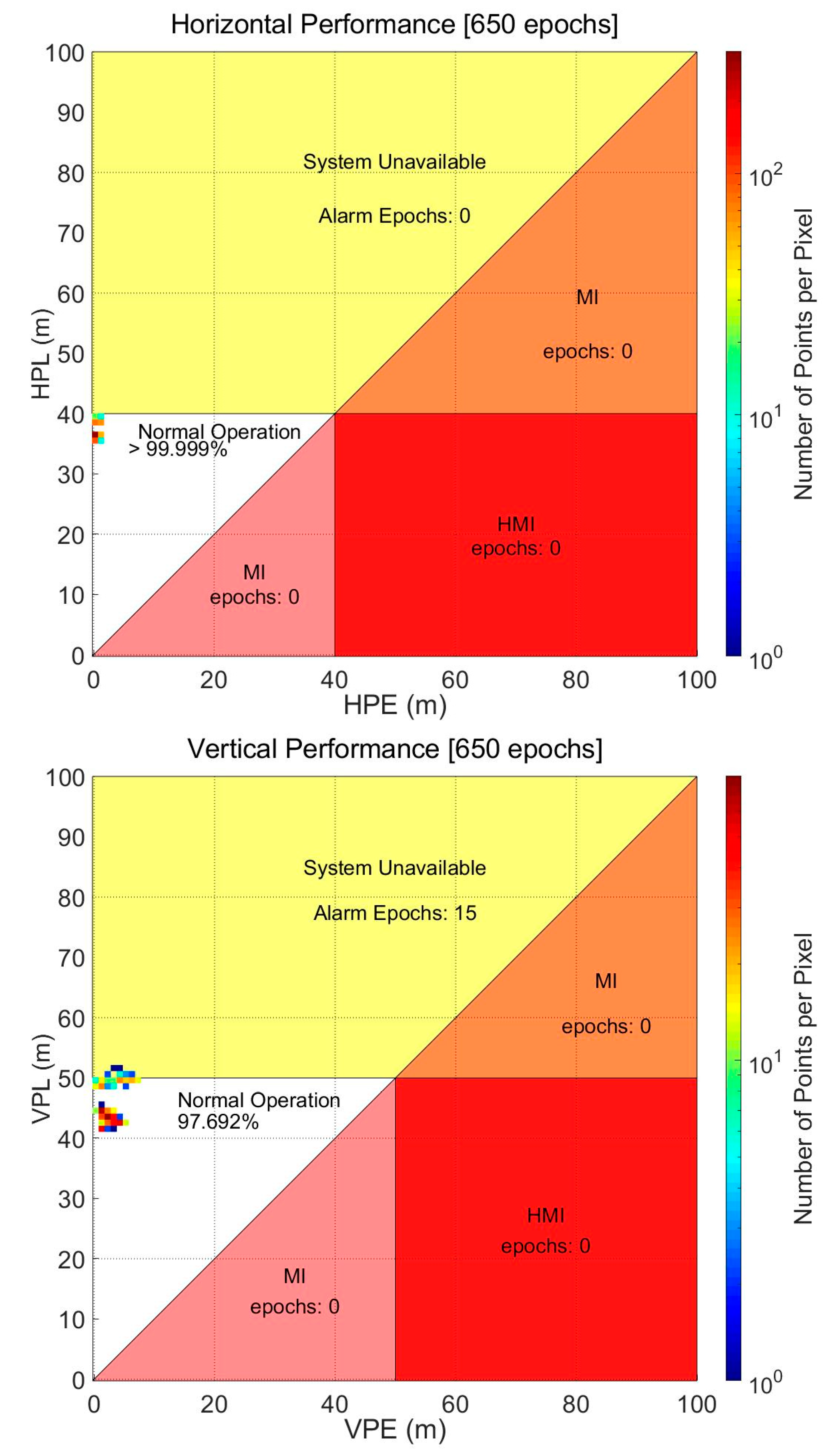
4.3. Dynamic Test Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Integration of Civil Unmanned Aircraft Systems (UAS) into the National Airspace System (NAS) Roadmap, 2nd ed.; Federal Aviation Administration, U.S. Dept. of Transportation: Washington, DC, USA, July 2018. Available online: https://www.faa.gov/uas/resources/policy_library/media/Second_Edition_Integration_of_Civil_UAS_NAS_Roadmap_July%202018.pdf (accessed on 26 May 2020).
- Shin, Y.H.; Lee, S.; Seo, J. Autonomous safe landing-area determination for rotorcraft UAVs using multiple IR-UWB radars. Aerosp. Sci. Technol. 2017, 69, 617–624. [Google Scholar] [CrossRef]
- MITRE. Issues Concerning Integration of Unmanned Aerial Vehicles in Civil Airspace. MITRE product. 2004. Available online: https://www.mitre.org/sites/default/files/pdf/04_1232.pdf (accessed on 26 May 2020).
- International Civil Aviation Organization. Unmanned Aircraft Systems (UAS). 2011. Available online: https://www.icao.int/Meetings/UAS/Documents/Circular%20328_en.pdf (accessed on 26 May 2020).
- Rhee, J.H.; Seo, J. Low-cost curb detection and localization system using multiple ultrasonic sensors. Sensors 2019, 19, 1389. [Google Scholar] [CrossRef] [PubMed]
- Bijjahalli, S.; Sabatini, R.; Gardi, A. GNSS Performance modelling and augmentation for urban air mobility. Sensors 2019, 19, 4209. [Google Scholar] [CrossRef] [PubMed]
- Perrottet, J. Enabling unrestricted UAS airspace access: Performance based navigation. In Proceedings of the 2017 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 18–20 April 2017; pp. 6D1-1–6D1-5. [Google Scholar]
- GAUSS to Analysis Galileo, EGNOS Benefits in Drone Operations, Air Traffic Management. Available online: https://airtrafficmanagement.keypublishing.com/2019/01/11/gauss-to-analyse-galileo-egnos-benefits-in-drone-operations/ (accessed on 11 January 2019).
- Geister, R.; Limmer, L.; Rippl, M.; Dautermann, T. Total system error performance of drones for an unmanned PBN concept. In Proceedings of the 2018 Integrated Communications, Navigation, Surveillance Conference (ICNS), Herndon, VA, USA, 10–12 April 2018; pp. 2D4-1–2D4-9. [Google Scholar]
- Ponchak, D.; Templin, F.; Sheffield, G.; Taboso, P.; Jain, R. An Implementation Analysis of Communications, Navigation, and Surveillance (CNS) Technologies for Unmanned Air Systems (UAS). In Proceedings of the 2018 IEEE/AIAA 37th Digital Avionics Systems Conference (DASC), London, UK, 23–27 September 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Enge, P.; Walter, T.; Pullen, S.; Kee, C.; Chao, Y.-C.; Tsai, Y.-J. Wide Area Augmentation of the Global Positioning System. Proc. IEEE. 1996, 84, 1063–1088. [Google Scholar] [CrossRef]
- Roturier, B.; Chatre, E.; Ventura-Traveset, J. The SBAS integrity concept standardized by ICAO. Application to EGNOS. Navigation Paris 2001, 49, 65–77. [Google Scholar]
- Introduction to the KASS Program Office. Available online: http://kass-eng.re.kr/ (accessed on 25 March 2019).
- GNSS Development Status and Future Work. Available online: https://www.icao.int/Meetings/AMC/MA/Eleventh%20Air%20Navigation%20Conference%20(ANConf11)/agendaitem6-1.ppt (accessed on 27 May 2020).
- RTCA. Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment; RTCA DO-229: Washington, DC, USA, 2006. [Google Scholar]
- Lo, S.C. Broadcasting GPS Integrity Information Using Loran-C. Ph.D. Thesis, Stanford University, San Francisco, CA, USA, July 2002. [Google Scholar]
- Discontinuance of the Nationwide Differential Global Positioning System (NDGPS). Available online: https://www.federalregister.gov/documents/2018/03/21/2018-05684/discontinuance-of-the-nationwide-differential-global-positioning-system-ndgps (accessed on 24 April 2020).
- European GNSS Agency. GNSS Market Report. Available online: https://www.gsa.europa.eu/system/files/reports/market_report_issue_6_v2.pdf (accessed on 26 May 2020).
- Sheridan, I. Drones and global navigation satellite systems: Current evidence from polar scientists. R. Soc. Open Sci. 2020, 7, 191494. [Google Scholar] [CrossRef] [PubMed]
- European GNSS Agency. European Global Navigation Satellite Systems (EGNSS) for Drones Operations. Available online: https://op.europa.eu/en/publication-detail/-/publication/03e63719-5784-11ea-8b81-01aa75ed71a1 (accessed on 26 May 2020).
- Hyde, G.; Bargellini, P.L. Satellite and Space Communications, Reference Data for Engineers, 9th ed.; Newnes: Boston, MA, USA, 2002; pp. 27-1–27-43. ISBN 9780750672917. [Google Scholar] [CrossRef]
- Seok, H.; Park, B. Prediction of the available time for the SBAS navigation of a drone in urban canyon with various flight heights. J. Cadaster Land Inf. 2016, 46, 133–148. [Google Scholar] [CrossRef]
- Classification of the Unmanned Aerial Systems. Available online: https://www.e-education.psu.edu/geog892/node/5 (accessed on 24 April 2020).
- Tromp Van Diggelen, F.S. A-GPS: Assisted GPS, GNSS, and SBAS; Artech House: Norwood, MA, USA, 2009. [Google Scholar]
- Elmezayen, A.; El-Rabbany, A. Precise Point Positioning Using World’s First Dual-Frequency GPS/GALILEO Smartphone. Sensors 2019, 19, 2593. [Google Scholar] [CrossRef] [PubMed]
- Kunitsyn, V.; Kurbatov, G.; Yasyukevich, Y.; Padokhin, A. Investigation of SBAS L1/L5 Signals and Their Application to the Ionospheric TEC Studies. IEEE Geosci. Remote. Sens. Lett. 2014, 12, 547–551. [Google Scholar] [CrossRef]
- U-blox 6 Receiver Description, GPS.G6-SW-10018-F ed., u-blox. April 2013. Available online: https://www.u-blox.com/sites/default/files/products/documents/u-blox6_ReceiverDescrProtSpec_%28GPS.G6-SW-10018%29_Public.pdf?utm_source=en%2Fimages%2Fdownloads%2FProduct_Docs%2Fu-blox6_ReceiverDescriptionProtocolSpec_%28GPS.G6-SW-10018%29.pdf (accessed on 26 May 2020).
- Yoon, D.; Kee, C.; Seo, J.; Park, B. Position accuracy improvement by implementing the DGNSS-CP algorithm in smartphones. Sensors 2016, 16, 910. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.; Seo, J.; Lee, J. A Comprehensive Method for GNSS Data Quality Determination to Improve Ionospheric Data Analysis. Sensors 2014, 14, 14971–14993. [Google Scholar] [CrossRef] [PubMed]
- Walter, T.; Enge, P.; Hansen, A. A Proposed Integrity Equation for WAAS MOPS. In Proceedings of the 10th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1997), Kansas City, MO, USA, 16–19 September 1997; pp. 475–484. [Google Scholar]
- DeCleene, B. Defining Pseudorange Integrity-Overbounding. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1916–1924. [Google Scholar]
- Lee, J.; Pullen, S.; Enge, P. Sigma Overbounding using a Position Domain Method for the Local Area Augmentaion of GPS. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1262–1274. [Google Scholar] [CrossRef]
- McGraw, G.; Murphy, T.; Brenner, M.; Pullen, S. Development of the LAAS Accuracy Models. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1212–1223. [Google Scholar]
- Lim, C.; Yoon, H.; Cho, A.; Yoo, C.-S.; Park, B. Dynamic performance evaluation of various GNSS receivers and positioning modes with only one flight test. Electronics 2019, 8, 1518. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Correction Type | Message Type (s) | Messages per Update Interval | Update Interval (sec) | Percent of Full Bandwidth |
|---|---|---|---|---|
| Satellite Mask | 1 | 1 | 60 | 1.7% |
| Fast Corrections | 2–4 | 2 | 6 | 33.3% |
| Fast Corrections (others) | 5 | 0 | 60 | 0.0% |
| UDRE (User Differential Range Error) Update | 6 | 0 | 6 | 0.0% |
| Fast Degradation | 7 | 1 | 120 | 0.8% |
| Geo Navigation | 9 | 1 | 120 | 0.8% |
| UDRE Degradation | 10 | 1 | 120 | 0.8% |
| UTC/WAAS | 12 | 1 | 300 | 0.3% |
| Geo Almanac | 17 | 1 | 300 | 0.3% |
| Ionosphere Grid Mask | 18 | 4 | 300 | 1.3% |
| Mixed Corrections | 24 | 1 | 6 | 16.7% |
| Long-term Corrections | 25 | 0 | 120 | 0.0% |
| Ionosphere Corrections | 26 | 25 | 300 | 8.3% |
| WAAS Service | 27 | 0 | 300 | 0.0% |
| UDRE modification | 28 | ~10 | 120 | 8.3% |
| Total | 71.2% |
| Pola RX (SBAS) | EVK-6 (SBAS) | EVK-6 (SBAS to RTCM) | ||||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | Horizontal | Vertical | |
| RMS error | 0.6808 m | 1.2759 m | 0.8494 m | 1.9137 m | 1.1072 m | 1.5516 m |
| 1.4494 m | 2.0906 m | 1.9007 m | ||||
| Mean error | 0.5934 m | 1.0232 m | 0.7043 m | 1.4234 m | 0.9599 m | 0.8588 m |
| Maximum error | 3.1261 m | 3.5479 m | 2.2237 m | 6.7379 m | 2.6533 m | 4.9379 m |
| Pola RX (SBAS) | EVK-6 (SBAS) | EVK-6 (SBAStoRTCM) | ||||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | Horizontal | Vertical | |
| RMS error | 1.7007 m | 5.2982 m | 1.8617 m | 4.9505 m | 0.6836 m | 3.1570 m |
| 5.5645 m | 5.2890 m | 3.2302 m | ||||
| Mean error | 1.5330 m | −5.1056 m | 1.6567 m | −4.6357 m | 0.5652 m | 2.9423 m |
| Maximum error | 4.4139 m | 13.3900 m | 3.4869 m | 8.8930 m | 1.5703 m | 5.5960 m |
| Position available | Stand-alone: 52.7% | Stand-alone: 96.0% | Stand-alone: 100% | |||
| DGPS: 0% | DGPS: 0% | DGPS: 100% | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, H.; Seok, H.; Lim, C.; Park, B. An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas. Sensors 2020, 20, 3047. https://doi.org/10.3390/s20113047
Yoon H, Seok H, Lim C, Park B. An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas. Sensors. 2020; 20(11):3047. https://doi.org/10.3390/s20113047
Chicago/Turabian StyleYoon, Hyojung, Hyojeong Seok, Cheolsoon Lim, and Byungwoon Park. 2020. "An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas" Sensors 20, no. 11: 3047. https://doi.org/10.3390/s20113047
APA StyleYoon, H., Seok, H., Lim, C., & Park, B. (2020). An Online SBAS Service to Improve Drone Navigation Performance in High-Elevation Masked Areas. Sensors, 20(11), 3047. https://doi.org/10.3390/s20113047