A Canopy Information Measurement Method for Modern Standardized Apple Orchards Based on UAV Multimodal Information



Abstract
1. Introduction
2. Materials and Methods
2.1. UAV Measurement System for Canopy Information of Orchards
2.2. UAV Measurement Tests for Gathering Orchard Canopy Information
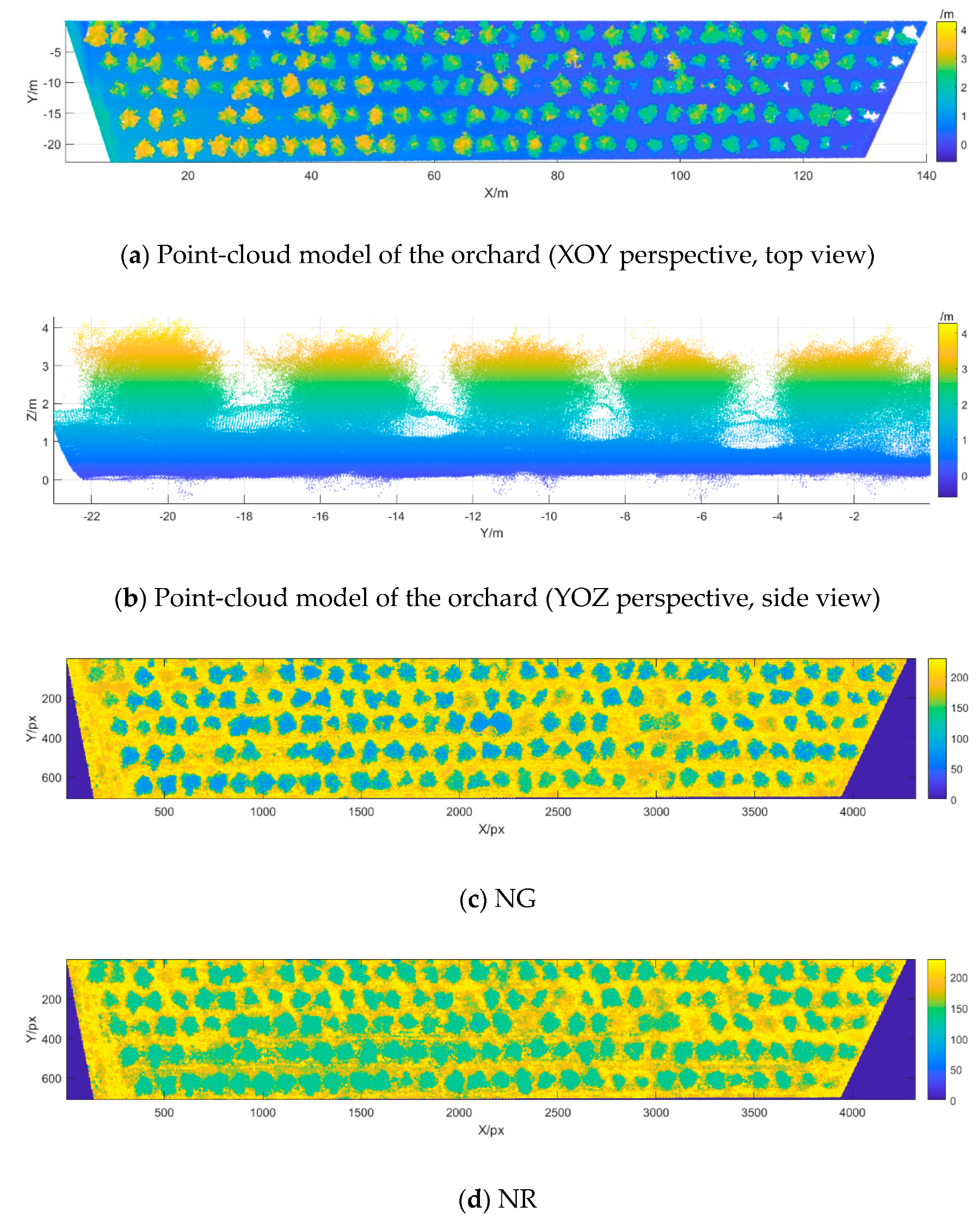
2.2.1. Measurement of Multimodal Information about the Orchard Canopy
2.2.2. Preprocessing of Multimodal Information of Orchard Canopy
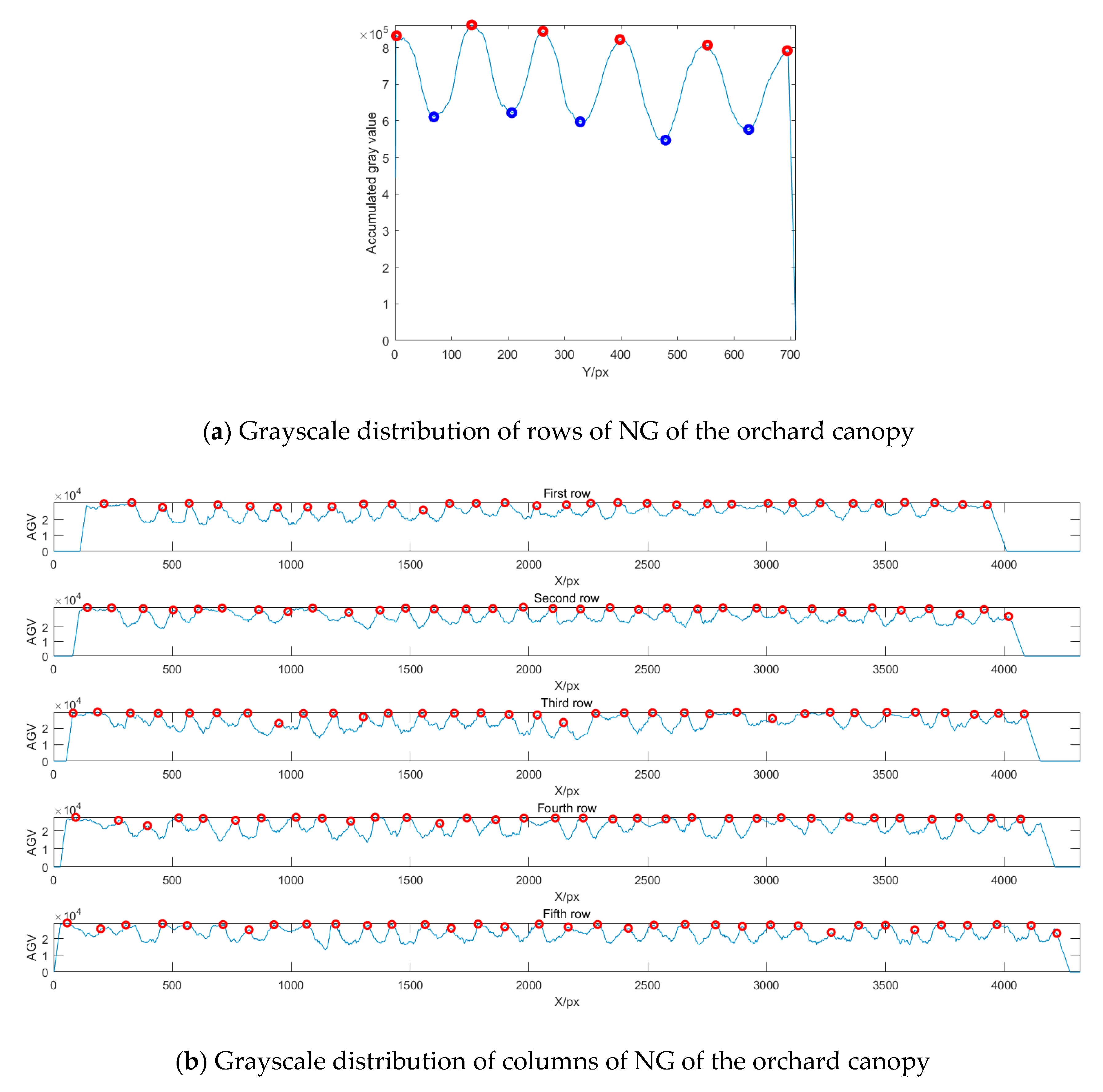
2.3. Row and Column Detection Methods of the Orchard Canopy
2.4. Methods for Characteristic Value Extraction for Multimodal Data of the Orchard Canopy
2.4.1. Calculation Method for Morphological Characteristic Values of Fruit Trees
2.4.2. Calculation Method for the Color Characteristic Values of Fruit Trees
2.4.3. Calculation Method for the Textural Characteristic Values of Fruit Trees
2.5. Measurement Models and Data Analysis Methods for Orchard Canopy Information
2.5.1. Results and Analysis Methods for Row and Column Detection in the Orchard Canopy
2.5.2. Results and Analysis Methods for the Measurement of Orchard Morphological Characteristic Values
2.5.3. Results and Analysis Methods for Orchard Yield Measurement
3. Results and Discussion
3.1. Characteristic Extraction from Multimodal Data of the Orchard Canopy
3.2. Calculation and Error Analysis of Orchard Canopy Morphological Information
3.3. Orchard Yield Prediction and Error Analysis
4. Conclusions
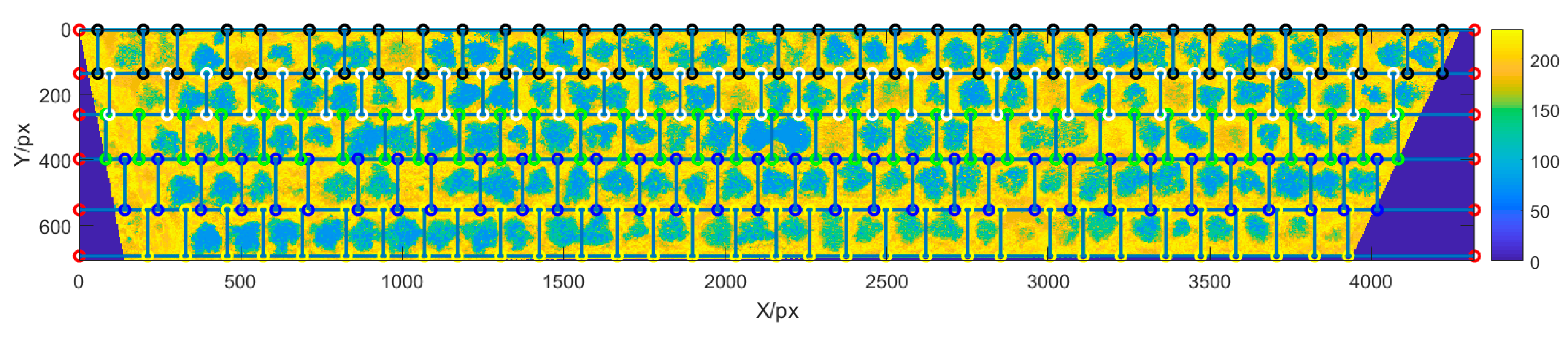
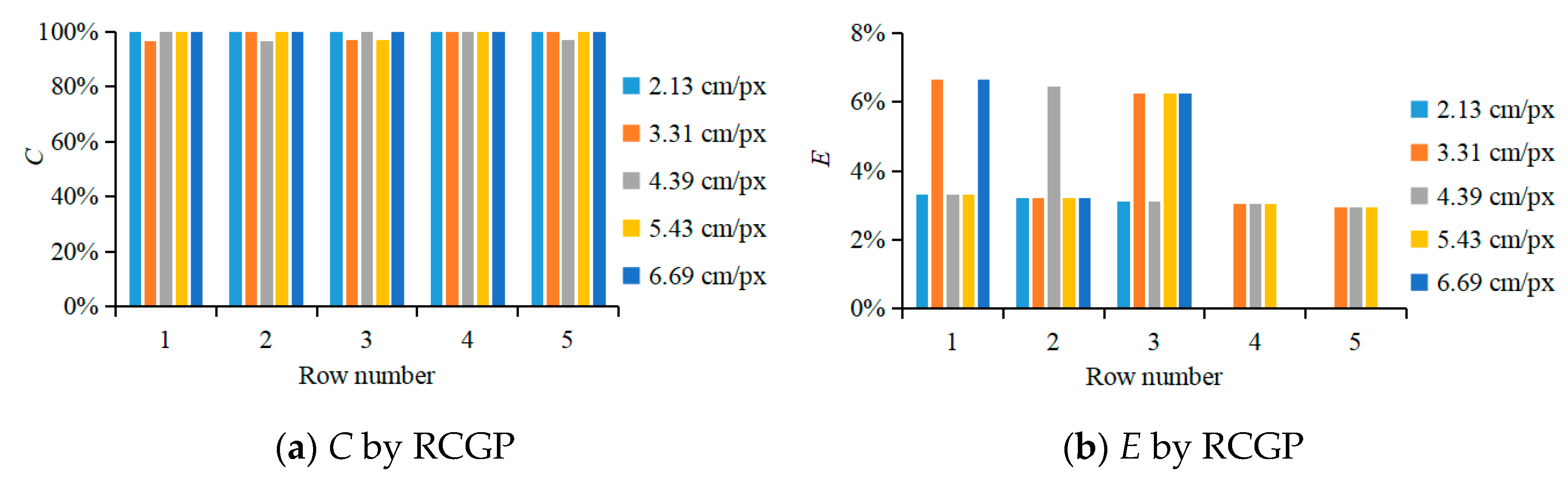
- In this study, a row and column detection method based on grayscale projection in orchard index images, RCGP, is proposed. It allows row and column segmentation using multimodal information of fruit tree canopies in modern standardized apple orchards. The results showed that using the RCGP method, the correction/accuracy rate of row detection in the orchard was 100.00%. Using the RCGP method, when GSD was 2.13, 3.31, 4.39, 5.43, and 6.69 cm/px, the average correction/accuracy rates of column detection based on the grayscale images of NG index were, respectively, 100.00%, 98.71%, 98.77%, 99.38%, and 100.00%, and the average misrecognition rates were 1.94%, 4.42%, 3.78%, 3.76%, and 3.23%. The RCGP detection method can detect dead trees with few leaves, so the column detection performance using this method was accurate and stable.
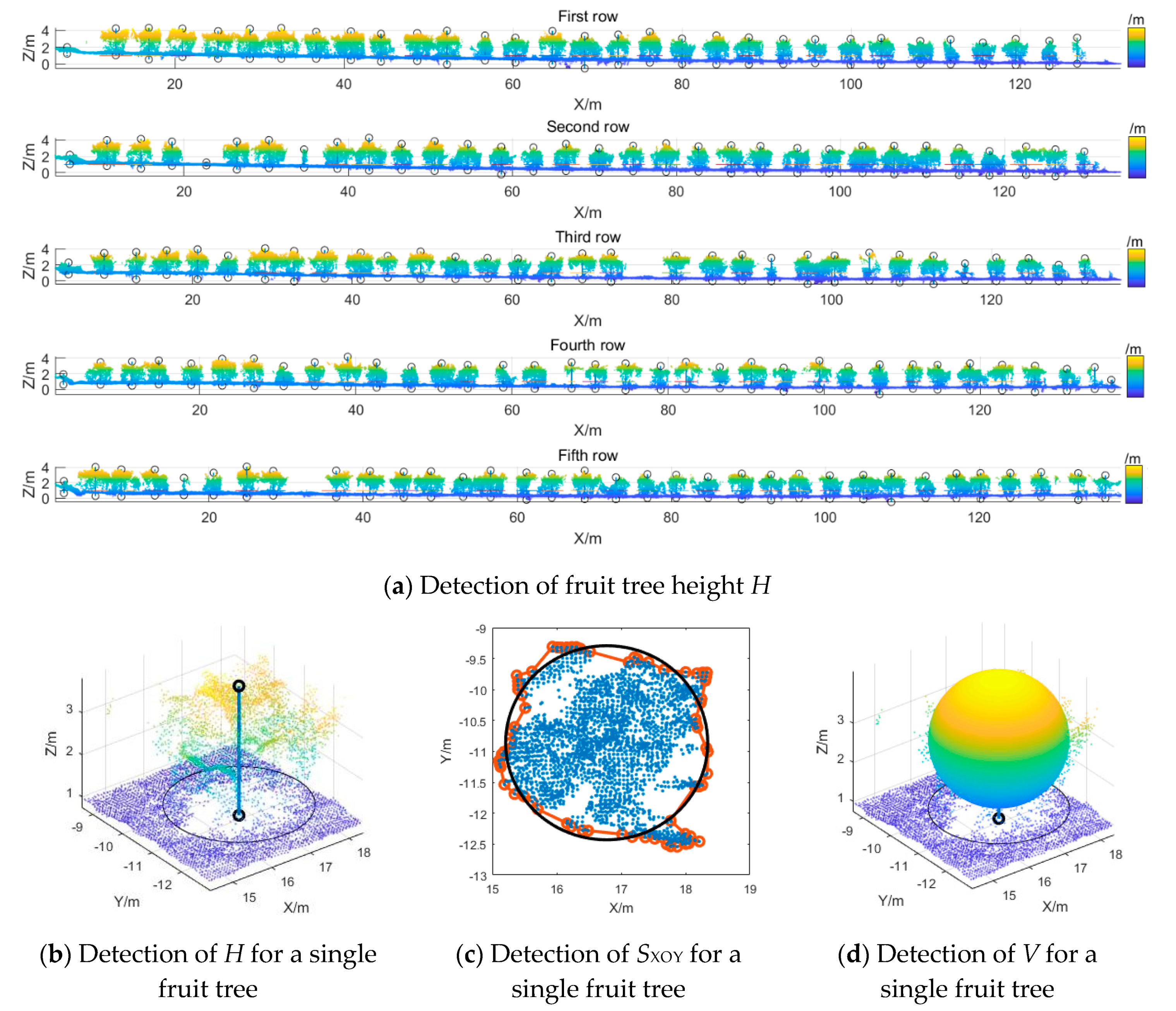
- A method for measuring canopy morphological information of fruit trees based on the 3D point-cloud model of orchards is established. The results show that when GSD was 2.13, 3.31, 4.39, 5.43, and 6.69 cm/px, comparing the hand-measured values of fruit tree canopy height H and the UAV-measured values yielded an R2 of 0.85–0.94, a RMSE of 0.08–0.14 m, and a RADavg of 1.72–3.42%; comparing the hand-measured values of fruit tree canopy SXOY and the UAV-measured values yielded an R2 of 0.79–0.94, a RMSE of 0.72–1.39 m2, and a RADavg of 4.33–9.87%; comparing the hand-measured values of fruit tree canopy V and the UAV-measured values yielded an R2 of 0.80–0.91, a RMSE of 1.41–2.21 m3, and a RADavg of 7.90–13.69%.
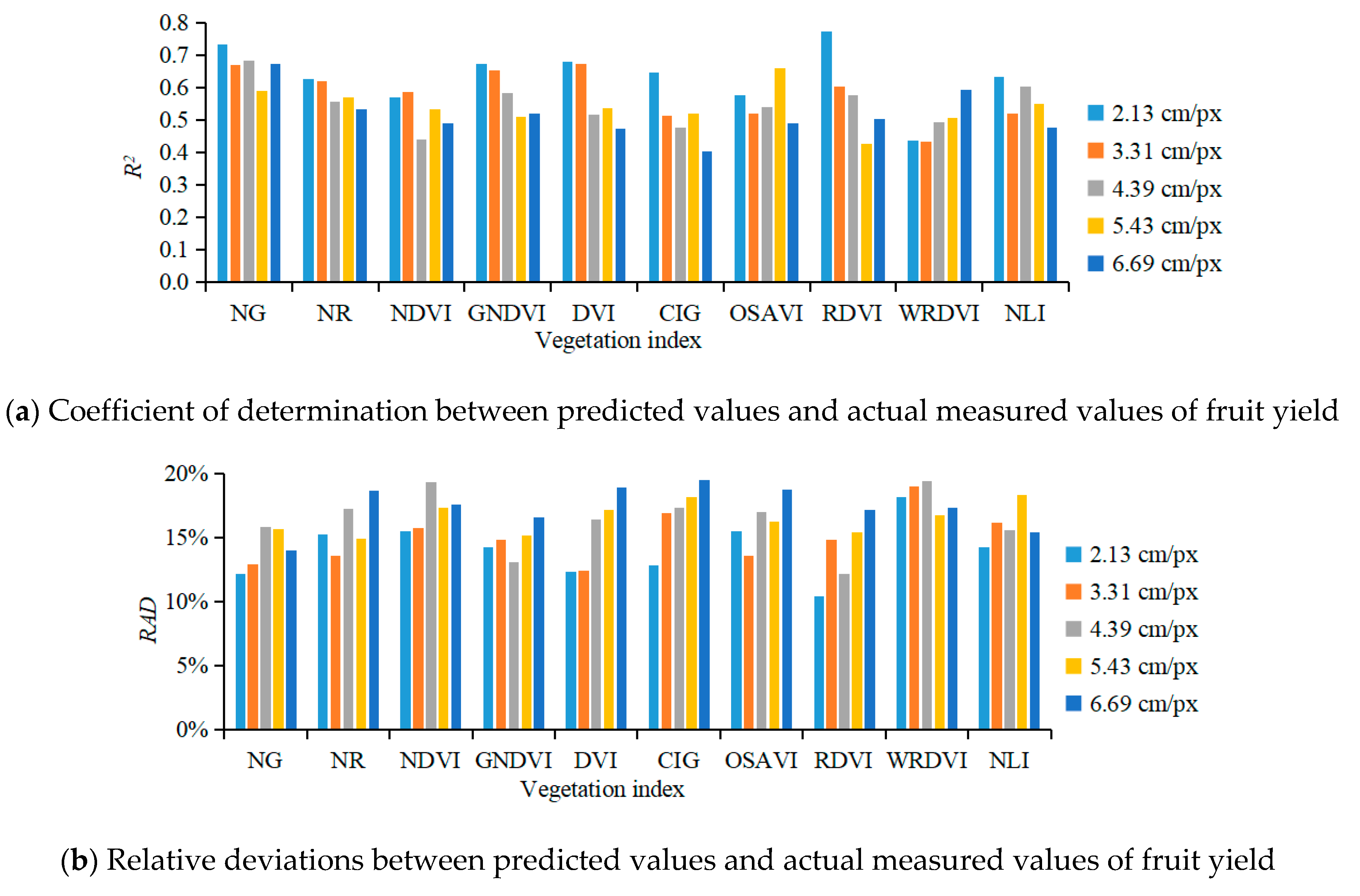
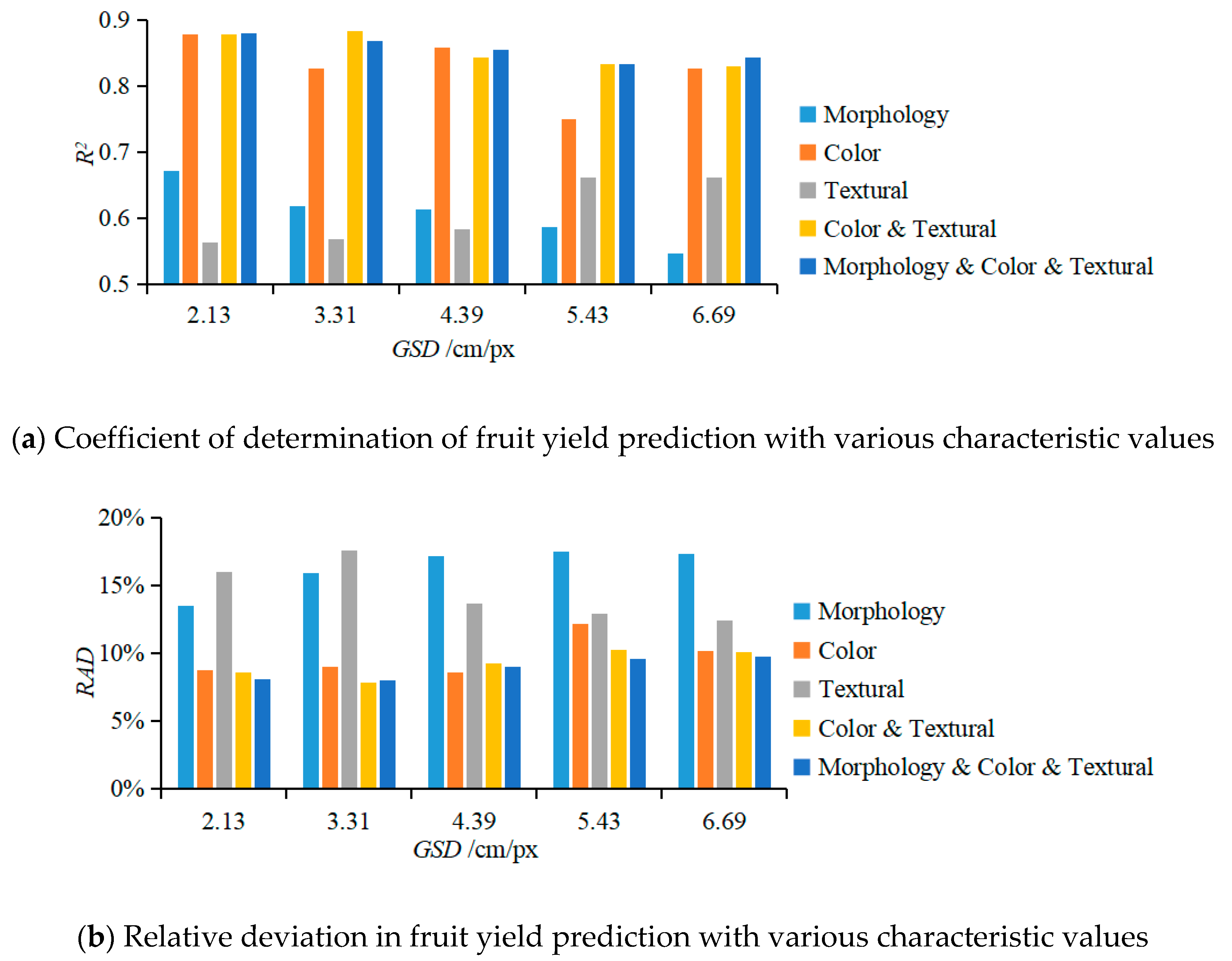
- The BPANN prediction models for measuring orchard yield are established, when the color moment characteristic values and textural moment characteristic values of all 10 vegetation indices and the morphological characteristic values of the 3D point-cloud model were input to predict fruit yield, the results show that when GSD was 2.13, 3.31, 4.39, 5.43, and 6.69 cm/px, the R2 of the BPANN prediction model was, respectively, 0.88, 0.87, 0.86, 0.83, and 0.84, RAD was 8.10%, 8.05%, 9.03%, 9.56%, and 9.76% and RMSE was 6.90 kg, 7.03 kg, 7.25 kg, 7.96 kg, and 7.93 kg. The model correlation was significant, which can be applied to fruit yield prediction.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; De Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [PubMed]
- Johansen, K.; Raharjo, T.; McCabe, M.F. Using multi-spectral UAV imagery to extract tree crop structural properties and assess pruning effects. Remote Sens. 2018, 10, 854. [Google Scholar] [CrossRef]
- Pforte, F.; Selbeck, J.; Hensel, O. Comparison of two different measurement techniques for automated determination of plum tree canopy cover. Biosyst. Eng. 2012, 113, 325–333. [Google Scholar] [CrossRef]
- Cheng, Z.; Qi, L.; Cheng, Y.; Wu, Y.; Zhang, H. Interlacing orchard canopy separation and assessment using UAV images. Remote Sens. 2020, 12, 767. [Google Scholar] [CrossRef]
- Wang, Z.; Underwood, J.; Walsh, K.B. Machine vision assessment of mango orchard flowering. Comput. Electron. Agric. 2018, 151, 501–511. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef]
- Guo, C.; Zong, Z.; Zhang, X.; Liu, G. Apple tree canopy geometric parameters acquirement based on 3D point clouds. Trans. Chin. Soc. Agric. Eng. 2017, 33, 175–181. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Kim, J.Y.; Glenn, D.M. Multi-modal sensor system for plant water stress assessment. Comput. Electron. Agric. 2017, 141, 27–34. [Google Scholar] [CrossRef]
- Koc-San, D.; Selim, S.; Aslan, N.; San, B.T. Automatic citrus tree extraction from UAV images and digital surface models using circular Hough transform. Comput. Electron. Agric. 2018, 150, 289–301. [Google Scholar] [CrossRef]
- Jichen, C.; Wang, X.; Jian, S.; Songlin, W.; Shuo, Y.; Chunjiang, Z. Development of real-time laser-scanning system to detect tree canopy characteristics for variable-rate pesticide application. Int. J. Agric. Biol. Eng. 2017, 10, 155–163. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vandevoorde, K.; Wouters, N.; Kayacan, E.; De Baerdemaeker, J.G.; Saeys, W. Detection of red and bicoloured apples on tree with an RGB-D camera. Biosyst. Eng. 2016, 146, 33–44. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Garcia-Ruiz, F.; Sankaran, S.; Maja, J.M.; Lee, W.S.; Rasmussen, J.; Ehsani, R. Comparison of two aerial imaging platforms for identification of Huanglongbing-infected citrus trees. Comput. Electron. Agric. 2013, 91, 106–115. [Google Scholar] [CrossRef]
- Suárez, L.; Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J.; Sagardoy, R.; Morales, F.; Fereres, E. Detecting water stress effects on fruit quality in orchards with time-series PRI airborne imagery. Remote Sens. Environ. 2010, 114, 286–298. [Google Scholar] [CrossRef]
- Ishida, T.; Kurihara, J.; Viray, F.A.; Namuco, S.B.; Paringit, E.C.; Perez, G.J.; Takahashi, Y.; Marciano, J.J. A novel approach for vegetation classification using UAV-based hyperspectral imaging. Comput. Electron. Agric. 2018, 144, 80–85. [Google Scholar] [CrossRef]
- Yeom, J.; Jung, J.; Chang, A.; Maeda, M.; Landivar, J. Automated open cotton boll detection for yield estimation using unmanned aircraft vehicle (UAV) Data. Remote Sens. 2018, 10, 1895. [Google Scholar] [CrossRef]
- Gong, Y.; Duan, B.; Fang, S.; Zhu, R.; Wu, X.; Ma, Y.; Peng, Y. Remote estimation of rapeseed yield with unmanned aerial vehicle (UAV) imaging and spectral mixture analysis. Plant Methods 2018, 14, 70. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Aimonino, D.R.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hernández-Montes, E.; O’Connell, M. Adaptive estimation of crop water stress in nectarine and peach orchards using high-resolution imagery from an unmanned aerial vehicle (UAV). Remote Sens. 2017, 9, 828. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R.; et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Khan, Z.; Chopin, J.; Cai, J.; Eichi, V.R.; Haefele, S.; Miklavcic, S.J. Quantitative estimation of wheat phenotyping traits using ground and aerial imagery. Remote Sens. 2018, 10, 950. [Google Scholar] [CrossRef]
- Pugh, N.A.; Horne, D.W.; Murray, S.C.; Carvalho, G., Jr.; Malambo, L.; Jung, J.; Chang, A.; Maeda, M.; Popescu, S.; Chu, T.; et al. Temporal estimates of crop growth in sorghum and maize breeding enabled by unmanned aerial systems. Plant Phenome J. 2018, 1, 170006. [Google Scholar] [CrossRef]
- Vega, F.A.; Ramírez, F.C.; Saiz, M.P.; Rosúa, F.O. Multi-temporal imaging using an unmanned aerial vehicle for monitoring a sunflower crop. Biosyst. Eng. 2015, 132, 19–27. [Google Scholar] [CrossRef]
- De Castro, A.; Torres-Sánchez, J.; Peña-Barragán, J.M.; Jiménez-Brenes, F.; Csillik, O.; López-Granados, F. An automatic random Forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef]
- Yang, H.; Wang, X.; Sun, G. Three-dimensional morphological measurement method for a fruit tree canopy based on kinect sensor self-calibration. Agronomy 2019, 9, 741. [Google Scholar] [CrossRef]
- Han, X.; Thomasson, J.A.; Bagnall, G.C.; Pugh, N.A.; Horne, D.W.; Rooney, W.L.; Jung, J.; Chang, A.; Malambo, L.; Popescu, S.C.; et al. Measurement and calibration of plant-height from fixed-wing UAV images. Sensors 2018, 18, E4092. [Google Scholar] [CrossRef]
- Stricker, M.; Orengo, M. Similarity of color images. Proc. SPIE Int. Soc. Opt. Eng. 1970, 2420, 381–392. [Google Scholar]
- Haralick, R.M.; Shanmugan, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pix4Dcapture | Values |
|---|---|
| Flight altitude | 22 m, 32 m, 43 m, 53 m, 64 m |
| Flight speed | Normal: 22 m (2.6 m/s), 32 m (3.7 m/s), 43 m (4.9 m/s), 53 m (6.1 m/s), 64 m (7.3 m/s) |
| Image overlap | Front overlap: 80%; side overlap: 80% |
| Camera | Parrot Sequoia, 16 million pixels, image format: JPG |
| Ground control | Pix4Dcapture: flight planning, Parrot Skycontroller 2 |
| Weather | Clear, little wind |
| Pix4Dmapper | Parameters |
|---|---|
| Coordinate Systems | Image coordinate system: WGS 84 (EGM 96 Geoid); unit: m Output coordinate system: WGS 84/UTM zone 51N (EGM 96 Geoid) |
| Initial Processing | Keypoint image scale: Full Calibration Method: Standard Internal Parameters Optimization: All External Parameters Optimization: All Rematch: Auto, yes |
| Point cloud densification | Image scale: 1/2 of original image size Point density: Optimal Minimum number of matches: 3 Export format: PLY |
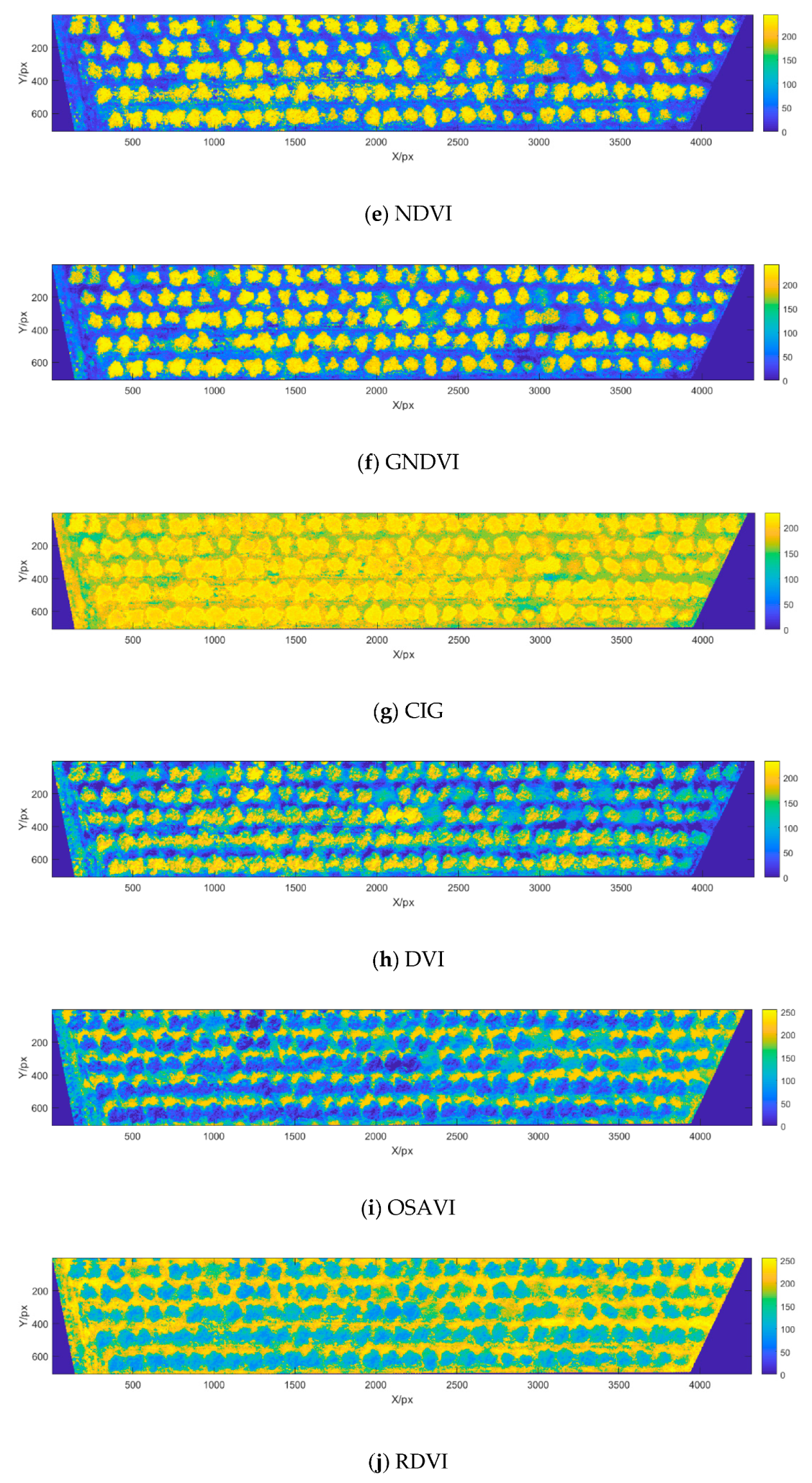
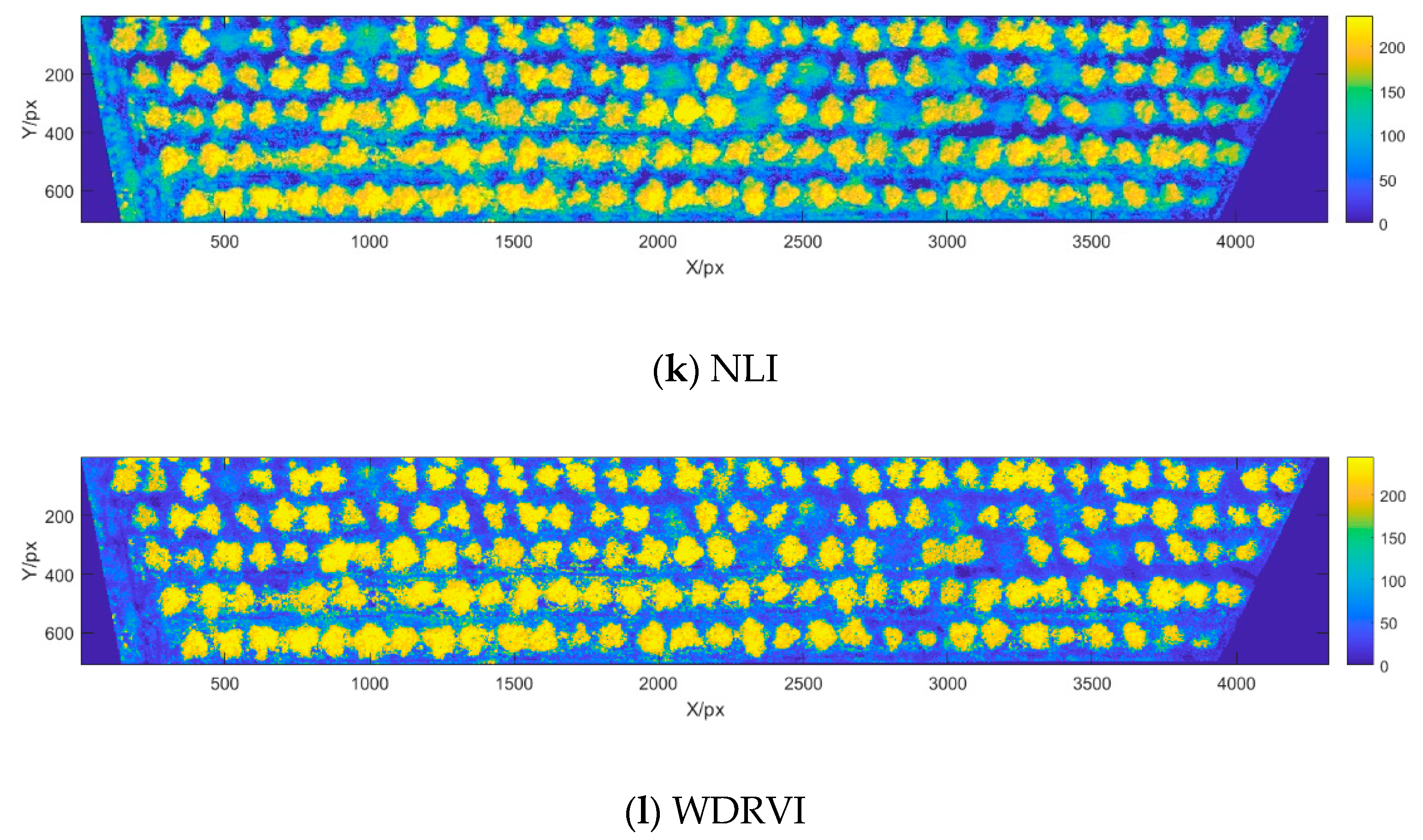
| DSM, orthographic image, and indices | Indices: NG, NR, NDVI, GNDVI, DVI, CIG, OSAVI, RDVI, WDRVI, NLI |
| Vegetation Index | Formula | Vegetation Index | Formula |
|---|---|---|---|
| NG | GRE/(NIR + RED + GRE) | NR | RED/(NIR + RED + GRE) |
| NDVI | (NIR − RED)/(NIR + RED) | GNDVI | (NIR − GRE)/(NIR + GRE) |
| DVI | NIR − RED | CIG | NIR/GRE − 1 |
| OSAVI | 1.16 (NIR − RED)/(NIR + RED + 0.16) | RDVI | (NIR − RED)/(NIR + RED) 1/2 |
| NLI | (NIR2 − RED)/(NIR2 + RED) | WDRVI | (0.2NIR − RED)/(0.2NIR + RED) |
| Morphological Parameter | GSD | R2 | RMSE | RADmax | RADmin | RADavg |
|---|---|---|---|---|---|---|
| H | 2.13 cm/px | 0.94 | 0.08 m | 8.04% | 0.03% | 1.72% |
| 3.31 cm/px | 0.92 | 0.10 m | 9.74% | 0.00% | 1.77% | |
| 4.39 cm/px | 0.91 | 0.09 m | 9.51% | 0.00% | 1.78% | |
| 5.43 cm/px | 0.88 | 0.10 m | 8.04% | 0.04% | 2.67% | |
| 6.69 cm/px | 0.85 | 0.14 m | 10.93% | 0.01% | 3.42% | |
| SXOY | 2.13 cm/px | 0.94 | 0.72 m2 | 19.48% | 0.09% | 4.33% |
| 3.31 cm/px | 0.91 | 0.94 m2 | 24.72% | 0.00% | 5.98% | |
| 4.39 cm/px | 0.86 | 1.10 m2 | 38.87% | 0.03% | 7.19% | |
| 5.43 cm/px | 0.86 | 1.13 m2 | 40.54% | 0.02% | 7.75% | |
| 6.69 cm/px | 0.79 | 1.39 m2 | 35.78% | 0.05% | 9.87% | |
| V | 2.13 cm/px | 0.91 | 1.41 m3 | 37.36% | 0.36% | 7.90% |
| 3.31 cm/px | 0.86 | 1.63 m3 | 35.91% | 0.38% | 8.28% | |
| 4.39 cm/px | 0.85 | 1.64 m3 | 35.78% | 0.14% | 11.90% | |
| 5.43 cm/px | 0.83 | 1.91 m3 | 49.79% | 0.16% | 12.61% | |
| 6.69 cm/px | 0.80 | 2.21 m3 | 55.99% | 0.35% | 13.69% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.; Wang, X.; Yang, H.; Zhang, X. A Canopy Information Measurement Method for Modern Standardized Apple Orchards Based on UAV Multimodal Information. Sensors 2020, 20, 2985. https://doi.org/10.3390/s20102985
Sun G, Wang X, Yang H, Zhang X. A Canopy Information Measurement Method for Modern Standardized Apple Orchards Based on UAV Multimodal Information. Sensors. 2020; 20(10):2985. https://doi.org/10.3390/s20102985
Chicago/Turabian StyleSun, Guoxiang, Xiaochan Wang, Haihui Yang, and Xianjie Zhang. 2020. "A Canopy Information Measurement Method for Modern Standardized Apple Orchards Based on UAV Multimodal Information" Sensors 20, no. 10: 2985. https://doi.org/10.3390/s20102985
APA StyleSun, G., Wang, X., Yang, H., & Zhang, X. (2020). A Canopy Information Measurement Method for Modern Standardized Apple Orchards Based on UAV Multimodal Information. Sensors, 20(10), 2985. https://doi.org/10.3390/s20102985