Mapping of Agricultural Subsurface Drainage Systems Using a Frequency-Domain Ground Penetrating Radar and Evaluating Its Performance Using a Single-Frequency Multi-Receiver Electromagnetic Induction Instrument †

 ,
,  ,
, 


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. The 3D-GPR Instrument and Survey
2.3. The 3D-GPR Data Processing, Global and Localized Penetration Depth
2.4. The DUALEM Instrument and Survey
2.5. The DUALEM Data Processing and Inversion
3. Results
3.1. The 3D-GPR Results
3.2. The DUALEM Results
4. Discussion
4.1. Combined Interpretation and Localized 3D-GPR Penetration Depth
4.2. Recommendations and Future Work
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Koganti, T.; Van De Vijver, E.; Allred, B.J.; Greve, M.H.; Ringgaard, J.; Iversen, B.V. Evaluating the Performance of a Frequency-Domain Ground Penetrating Radar and Multi-Receiver Electromagnetic Induction Sensor to Map Subsurface Drainage in Agricultural Areas. In Proceedings of the 5th Global Workshop on Proximal Soil Sensing, Columbia, MO, USA, 28–31 May 2019; pp. 29–34. [Google Scholar]
- Skaggs, R.W.; Breve, M.A.; Gilliam, J.W. Hydrologic and Water-Quality Impacts of Agricultural Drainage. Crit. Rev. Environ. Sci. Technol. 1994, 24, 1–32. [Google Scholar] [CrossRef]
- Khand, K.; Kjaersgaard, J.; Hay, C.; Jia, X.H. Estimating Impacts of Agricultural Subsurface Drainage on Evapotranspiration Using the Landsat Imagery-Based METRIC Model. Hydrology-Basel 2017, 4, 49. [Google Scholar] [CrossRef]
- Fraser, H.; Fleming, R.; Eng, P. Environmental benefits of tile drainage; LICO–Land Improvement Contractors of Ontario, Ridgetown College, University of Guelph: Ridgetown, ON, Cananda, 2001. [Google Scholar]
- Rogers, M.B.; Cassidy, J.R.; Dragila, M.I. Ground-based magnetic surveys as a new technique to locate subsurface drainage pipes: A case study. Appl. Eng. Agric. 2005, 21, 421–426. [Google Scholar] [CrossRef]
- Jaynes, D.B.; Colvin, T.S.; Karlen, D.L.; Cambardella, C.A.; Meek, D.W. Nitrate loss in subsurface drainage as affected by nitrogen fertilizer rate. J. Environ. Qual. 2001, 30, 1305–1314. [Google Scholar] [CrossRef] [PubMed]
- Jaynes, D.B.; Ahmed, S.I.; Kung, K.J.S.; Kanwar, R.S. Temporal dynamics of preferential flow to a subsurface drain. Soil Sci. Soc. Am. J. 2001, 65, 1368–1376. [Google Scholar] [CrossRef]
- Hansen, A.L.; Storgaard, A.; He, X.; Hojberg, A.L.; Refsgaard, J.C.; Iversen, B.V.; Kjaergaard, C. Importance of geological information for assessing drain flow in a Danish till landscape. Hydrol. Process. 2019, 33, 450–462. [Google Scholar] [CrossRef]
- Naz, B.S.; Ale, S.; Bowling, L.C. Detecting subsurface drainage systems and estimating drain spacing in intensively managed agricultural landscapes. Agric. Water Manag. 2009, 96, 627–637. [Google Scholar] [CrossRef]
- Jaynes, D.B.; Isenhart, T.M. Reconnecting Tile Drainage to Riparian Buffer Hydrology for Enhanced Nitrate Removal. J. Environ. Qual. 2014, 43, 631–638. [Google Scholar] [CrossRef]
- Hua, G.H.; Salo, M.W.; Schmit, C.G.; Hay, C.H. Nitrate and phosphate removal from agricultural subsurface drainage using, laboratory woodchip bioreactors and recycled steel byproduct filters. Water Res. 2016, 102, 180–189. [Google Scholar] [CrossRef]
- Erickson, A.J.; Gulliver, J.S.; Weiss, P.T. Phosphate Removal from Agricultural Tile Drainage with Iron Enhanced Sand. Water-Sui 2017, 9, 672. [Google Scholar] [CrossRef]
- Vymazal, J. Removal of nutrients in various types of constructed wetlands. Sci. Total Environ. 2007, 380, 48–65. [Google Scholar] [CrossRef] [PubMed]
- Allred, B.J.; Fausey, N.R.; Peters, L.; Chen, C.; Daniels, J.J.; Youn, H. Detection of buried agricultural drainage pipe with geophysical methods. Appl. Eng. Agric. 2004, 20, 307–318. [Google Scholar] [CrossRef]
- Allred, B.J.; Daniels, J.J.; Fausey, N.R.; Chen, C.; Peters, L.; Youn, H. Important considerations for locating buried agricultural drainage pipe using ground penetrating radar. Appl. Eng. Agric. 2005, 21, 71–87. [Google Scholar] [CrossRef]
- Allred, B.J.; Redman, J.D. Location of Agricultural Drainage Pipes and Assessment of Agricultural Drainage Pipe Conditions Using Ground Penetrating Radar. J. Environ. Eng. Geophys. 2010, 15, 119–134. [Google Scholar] [CrossRef]
- Allred, B.; Wishart, D.; Martinez, L.; Schomberg, H.; Mirsky, S.; Meyers, G.; Elliott, J.; Charyton, C. Delineation of Agricultural Drainage Pipe Patterns Using Ground Penetrating Radar Integrated with a Real-Time Kinematic Global Navigation Satellite System. Agriculture-Basel 2018, 8, 167. [Google Scholar] [CrossRef]
- Designing a Subsurface Drainage System. Available online: https://extension.umn.edu/agricultural-drainage/designing-subsurface-drainage-system#topography-and-system-layout-1367611 (accessed on 20 April 2020).
- Schwab, G.O.; Frevert, R.K.; Edminster, T.W.; Barnes, K.K. Chapter 14—Subsurface Drainage Design. In Soil and Water Conservation Engineering, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1981; pp. 314–347. [Google Scholar]
- Allred, B.J. A GPR Agricultural Drainage Pipe Detection Case Study: Effects of Antenna Orientation Relative to Drainage Pipe Directional Trend. J. Environ. Eng. Geophys. 2013, 18, 55–69. [Google Scholar] [CrossRef]
- Francese, R.G.; Finzi, E.; Morelli, G. 3-D high-resolution multi-channel radar investigation of a Roman village in Northern Italy. J. Appl. Geophys. 2009, 67, 44–51. [Google Scholar] [CrossRef]
- Linford, N.; Linford, P.; Martin, L.; Payne, A. Stepped Frequency Ground-penetrating Radar Survey with a Multi-element Array Antenna: Results from Field Application on Archaeological Sites. Archaeol. Prospect. 2010, 17, 187–198. [Google Scholar] [CrossRef]
- Trinks, I.; Johansson, B.; Gustafsson, J.; Emilsson, J.; Friborg, J.; Gustafsson, C.; Nissen, J.; Hinterleitner, A. Efficient, Large-scale Archaeological Prospection using a True Three-dimensional Ground-penetrating Radar Array System. Archaeol. Prospect. 2010, 17, 175–186. [Google Scholar] [CrossRef]
- Goodman, D.; Novo, A.; Morelli, G.; Piro, S.; Kutrubes, D.; Lorenzo, H. Advances in GPR Imaging with Multi-Channel Radar Systems from Engineering to Archaeology. In Proceedings of the Symposium on the Application of Geophysics to Engineering and Environmental Problems, Charleston, SC, USA, 10–14 April 2011; pp. 416–422. [Google Scholar]
- Novo, A.; Dabas, M.; Morelli, G. The STREAM X Multichannel GPR System: First Test at Vieil-Evreux (France) and Comparison with Other Geophysical Data. Archaeol. Prospect. 2012, 19, 179–189. [Google Scholar] [CrossRef]
- Eide, E.S.; Hjelmstad, J.F. 3D utility mapping using electronically scanned antenna array. Proc. Soc. Photo-Opt. Ins. 2002, 4758, 192–196. [Google Scholar]
- Triantafilis, J.; Santos, F.A.M. Electromagnetic conductivity imaging (EMCI) of soil using a DUALEM-421 and inversion modelling software (EM4Soil). Geoderma 2013, 211, 28–38. [Google Scholar] [CrossRef]
- Triantafilis, J.; Ribeiro, J.; Page, D.; Santos, F.A.M. Inferring the Location of Preferential Flow Paths of a Leachate Plume by Using a DUALEM-421 and a Quasi-Three-Dimensional Inversion Model. Vadose Zone J. 2013, 12. [Google Scholar] [CrossRef]
- Koganti, T.; Narjary, B.; Zare, E.; Pathan, A.L.; Huang, J.; Triantafilis, J. Quantitative mapping of soil salinity using the DUALEM-21S instrument and EM inversion software. Land Degrad. Dev. 2018, 29, 1768–1781. [Google Scholar] [CrossRef]
- Huang, H.P. Depth of investigation for small broadband electromagnetic sensors. Geophysics 2005, 70, G135–G142. [Google Scholar] [CrossRef]
- Brosten, T.R.; Day-Lewis, F.D.; Schultz, G.M.; Curtis, G.P.; Lane, J.W. Inversion of multi-frequency electromagnetic induction data for 3D characterization of hydraulic conductivity. J. Appl. Geophys. 2011, 73, 323–335. [Google Scholar] [CrossRef]
- Tromp-van Meerveld, H.J.; McDonnell, J.J. Assessment of multi-frequency electromagnetic induction for determining soil moisture patterns at the hillslope scale. J. Hydrol. 2009, 368, 56–67. [Google Scholar] [CrossRef]
- Van De Vijver, E.; Van Meirvenne, M.; Saey, T.; Delefortrie, S.; De Smedt, P.; De Pue, J.; Seuntjens, P. Combining multi-receiver electromagnetic induction and stepped frequency ground penetrating radar for industrial site investigation. Eur. J. Soil Sci. 2015, 66, 688–698. [Google Scholar] [CrossRef]
- Van De Vijver, E.; Van Meirvenne, M.; Vandenhaute, L.; Delefortrie, S.; De Smedt, P.; Saey, T.; Seuntjens, P. Urban soil exploration through multi-receiver electromagnetic induction and stepped-frequency ground penetrating radar. Environ. Sci.-Proc. Impacts 2015, 17, 1271–1281. [Google Scholar] [CrossRef]
- Inman, D.J.; Freeland, R.S.; Yoder, R.E.; Ammons, J.T.; Leonard, L.L. Evaluating GPR and EMI for morphological studies of loessial soils. Soil Sci. 2001, 166, 622–630. [Google Scholar] [CrossRef]
- Yoder, R.E.; Freeland, R.S.; Ammons, J.T.; Leonard, L.L. Mapping agricultural fields with GPR and EMI to identify offsite movement of agrochemicals. J. Appl. Geophys. 2001, 47, 251–259. [Google Scholar] [CrossRef]
- Shamatava, I.; Shubitidze, F.; Chen, C.C.; Youn, H.S.; O’Neill, K.; Sun, K. Potential benefits of combining EMI and GPR for enhanced UXO discrimination at highly contaminated sites. In Proceedings of the Detection and Remediation Technologies for Mines and Minelike Targets IX, Orlando, FL, USA, 21 September 2004; Volume 5415, pp. 1201–1210. [Google Scholar]
- Masarik, M.P.; Burns, J.; Thelen, B.T.; Kelly, J.; Havens, T.C. Enhanced Buried UXO Detection via GPR/EMI Data Fusion. In Proceedings of the Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXI, Baltimore, MD, USA, 3 May 2016; Volume 9823, p. 98230R. [Google Scholar] [CrossRef]
- Eide, E.; Hjelmstad, J. UXO and landmine detection using 3-dimensional ground penetrating radar system in a network centric environment. In Proceedings of ISTMP. 2004. Available online: http://3d-radar.com/wp-content/uploads/2009/02/paper-istmp-2004-eide-hjelmstad1.pdf (accessed on 14 July 2020).
- Saey, T.; Van Meirvenne, M.; De Smedt, P.; Stichelbaut, B.; Delefortrie, S.; Baldwin, E.; Gaffney, V. Combining EMI and GPR for non-invasive soil sensing at the Stonehenge World Heritage Site: The reconstruction of a WW1 practice trench. Eur. J. Soil Sci. 2015, 66, 166–178. [Google Scholar] [CrossRef]
- Saey, T.; Delefortrie, S.; Verdonck, L.; De Smedt, P.; Van Meirvenne, M. Integrating EMI and GPR data to enhance the three-dimensional reconstruction of a circular ditch system. J. Appl. Geophys. 2014, 101, 42–50. [Google Scholar] [CrossRef]
- Pedrera-Parrilla, A.; Van De Vijver, E.; Van Meirvenne, M.; Espejo-Perez, A.J.; Giraldez, J.V.; Vanderlinden, K. Apparent electrical conductivity measurements in an olive orchard under wet and dry soil conditions: Significance for clay and soil water content mapping. Precis. Agric. 2016, 17, 531–545. [Google Scholar] [CrossRef]
- Doolittle, J.A.; Brevik, E.C. The use of electromagnetic induction techniques in soils studies. Geoderma 2014, 223, 33–45. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M. Application of soil electrical conductivity to precision agriculture: Theory, principles, and guidelines. Agron. J. 2003, 95, 455–471. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M. Apparent soil electrical conductivity measurements in agriculture. Comput. Electron. Agric. 2005, 46, 11–43. [Google Scholar] [CrossRef]
- Heil, K.; Schmidhalter, U. The Application of EM38: Determination of Soil Parameters, Selection of Soil Sampling Points and Use in Agriculture and Archaeology. Sensors-Basel 2017, 17, 2540. [Google Scholar] [CrossRef]
- Lesch, S.M.; Corwin, D.L.; Robinson, D.A. Apparent soil electrical conductivity mapping as an agricultural management tool in arid zone soils. Comput. Electron. Agric. 2005, 46, 351–378. [Google Scholar] [CrossRef]
- Delefortrie, S.; Hanssens, D.; Saey, T.; Van De Vijver, E.; Smetryns, M.; Bobe, C.; De Smedt, P. Validating land-based FDEM data and derived conductivity maps: Assessment of signal calibration, signal attenuation and the impact updates of heterogeneity. J. Appl. Geophys. 2019, 164, 179–190. [Google Scholar] [CrossRef]
- Rhoades, J.D.; Lesch, S.M.; LeMert, R.D.; Alves, W.J. Assessing irrigation/drainage/salinity management using spatially referenced salinity measurements. Agric. Water Manag. 1997, 35, 147–165. [Google Scholar] [CrossRef]
- Annan, A.P. Electromagnetic principles of ground penetrating radar. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands, 2009; pp. 1–37. [Google Scholar]
- De Schepper, G.; Therrien, R.; Refsgaard, J.C.; He, X.; Kjaergaard, C.; Iversen, B.V. Simulating seasonal variations of tile drainage discharge in an agricultural catchment. Water Resour. Res. 2017, 53, 3896–3920. [Google Scholar] [CrossRef]
- Lindhardt, B.; Abildtrup, C.; Vosgerau, H.; Olsen, P.; Torp, S.; Iversen, B.V.; Jørgensen, J.O.; Plauborg, F.; Rasmussen, P.; Gravesen, P. The Danish Pesticide Leaching Assessment Programme—Sites Characterization and Monitoring Design. Available online: http://pesticidvarsling.dk/wp-content/uploads/Etableringsrapport/plap1_sept-2001.pdf (accessed on 23 October 2019).
- Poulsen, J.R.; Sebok, E.; Duque, C.; Tetzlaff, D.; Engesgaard, P.K. Detecting groundwater discharge dynamics from point-to-catchment scale in a lowland stream: Combining hydraulic and tracer methods. Hydrol. Earth Syst. Sci. 2015, 19, 1871–1886. [Google Scholar] [CrossRef]
- Rasmussen, P. Monitoring shallow groundwater quality in agricultural watersheds in Denmark. Environ. Geol. 1996, 27, 309–319. [Google Scholar] [CrossRef]
- Soil Profile Information, Kalundborg. Available online: https://futurecropping.dk/intra/soil-profile-information/ (accessed on 22 January 2020).
- Rosenbom, A.E.; Karan, S.; Badawi, N.; Gudmundsson, L.; Hansen, C.H.; Kazmierczak, J.; Nielsen, C.B.; Plauborg, F.; Olsen, P. The Danish Pesticide Leaching Assessment Programme—Monitoring Results May 1999–June 2018. Available online: http://pesticidvarsling.dk/wp-content/uploads/2020/05/VAP-rapport-2019-1.pdf (accessed on 3 July 2020).
- IUSS Working Group WRB. World reference base for soil resources 2014, update 2015: International soil classification system for naming soils and creating legends for soil maps. In World Soil Resources Reports No. 106; FAO Rome: Roma, Italy, 2015. [Google Scholar]
- Madsen, H.B.; Jensen, N.H. Pedological Regional Variations in Well-drained Soils, Denmark. Geogr. Tidsskr.-Dan. J. Geogr. 1992, 92, 61–69. [Google Scholar] [CrossRef]
- Danish Meteorological Institute Weather Archive. Available online: https://www.dmi.dk/vejrarkiv/ (accessed on 20 April 2020).
- Olhoeft, G.R. Electromagnetic field and material properties in ground penetrating radar. In Proceedings of the 2nd International Workshop on Advanced Ground Penetrating Radar, Delft, The Netherlands, 14–16 May 2003; pp. 144–147. [Google Scholar]
- Everett, M.E. Ground-penetrating radar. In Near-Surface Applied Geophysics; Cambridge University Press: New York, NY, USA, 2013; pp. 239–277. [Google Scholar]
- Bradford, J.H. Frequency-dependent attenuation analysis of ground-penetrating radar data. Geophysics 2007, 72, J7–J16. [Google Scholar] [CrossRef]
- Loewer, M.; Igel, J.; Wagner, N. Frequency-dependent attenuation analysis in soils using broadband dielectric spectroscopy and TDR. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 208–213. [Google Scholar]
- The Power of Average Trace Amplitude (ATA) Plots. Available online: http://www.sensoft.ca/blog/gpr-average-trace-amplitude/ (accessed on 18 October 2019).
- Reynolds, J.M. Ground penetrating radar. In An Introduction to Applied and Environmental Geophysics; John Wiley & Sons: Chichester, UK, 1997; pp. 681–749. [Google Scholar]
- Eide, E.; Valand, P.A.; Sala, J. Ground-Coupled Antenna Array for Step-Frequency GPR. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 756–761. [Google Scholar]
- Koppenjan, S. Ground penetrating radar systems and design. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands, 2009; pp. 73–97. [Google Scholar]
- Koganti, T.; Van De Vijver, E.; Allred, B.J.; Greve, M.H.; Ringgaard, J.; Iversen, B.V. Assessment of a Stepped-Frequency GPR for Subsurface Drainage Mapping for Different Survey Configurations and Site Conditions. In Proceedings of the 10th International Workshop on Advanced Ground Penetrating Radar, The Hague, The Netherlands, 8–12 September 2019; pp. 1–6. [Google Scholar]
- Harris, F.J. On the use of windows for harmonic analysis with the discrete Fourier transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Sala, J.; Linford, N. Processing stepped frequency continuous wave GPR systems to obtain maximum value from archaeological data sets. Near Surf. Geophys. 2012, 10, 3–10. [Google Scholar] [CrossRef]
- Cassidy, N.J. Ground penetrating radar data processing, modelling and analysis. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands, 2009; pp. 141–176. [Google Scholar]
- Cassidy, N.J. Electrical and magnetic properties of rocks, soils and fluids. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands, 2009; pp. 41–72. [Google Scholar]
- Everett, M.E. Electromagnetic induction. In Near-Surface Applied Geophysics; Cambridge University Press: New York, NY, USA, 2013; pp. 200–238. [Google Scholar]
- McNeill, J.D. Electromagnetic terrain conductivity measurement at low induction numbers. In Technical Note TN-6; Geonic Ltd.: Mississauga, ON, Canada, 1980. [Google Scholar]
- Tolboll, R.J.; Christensen, N.B. Sensitivity functions of frequency-domain magnetic dipole-dipole systems. Geophysics 2007, 72, F45–F56. [Google Scholar] [CrossRef]
- Callegary, J.B.; Ferre, T.P.A.; Groom, R.W. Vertical spatial sensitivity and exploration depth of low-induction-number electromagnetic-induction instruments. Vadose Zone J. 2007, 6, 158–167. [Google Scholar] [CrossRef]
- Callegary, J.B.; Ferre, T.P.A.; Groom, R.W. Three-Dimensional Sensitivity Distribution and Sample Volume of Low-Induction-Number Electromagnetic-Induction Instruments. Soil Sci. Soc. Am. J. 2012, 76, 85–91. [Google Scholar] [CrossRef]
- Saey, T.; Simpson, D.; Vermeersch, H.; Cockx, L.; Van Meirvenne, M. Comparing the EM38DD and DUALEM-21S Sensors for Depth-to-Clay Mapping. Soil Sci. Soc. Am. J. 2009, 73, 7–12. [Google Scholar] [CrossRef]
- Christiansen, A.V.; Pedersen, J.B.; Auken, E.; Soe, N.E.; Holst, M.K.; Kristiansen, S.M. Improved Geoarchaeological Mapping with Electromagnetic Induction Instruments from Dedicated Processing and Inversion. Remote Sens.-Basel 2016, 8, 1022. [Google Scholar] [CrossRef]
- Christiansen, A.V.; Auken, E. A global measure for depth of investigation. Geophysics 2012, 77, Wb171–Wb177. [Google Scholar] [CrossRef]
- DUALEM-21S User’s Manual; Dualem Inc.: Milton, ON, Canada, 2008.
- Auken, E.; Viezzoli, A.; Christensen, A.V. A single software for processing, inversion, and presentation of AEM data of different systems: The Aarhus Workbench. In Proceedings of the International Geophysical Conference and Exhibition, Adelaide, SA, Australia, 22–25 February 2009; pp. 1–5. [Google Scholar]
- Auken, E.; Christiansen, A.V.; Kirkegaard, C.; Fiandaca, G.; Schamper, C.; Behroozmand, A.A.; Binley, A.; Nielsen, E.; Efferso, F.; Christensen, N.B.; et al. An overview of a highly versatile forward and stable inverse algorithm for airborne, ground-based and borehole electromagnetic and electric data. Explor. Geophys. 2015, 46, 223–235. [Google Scholar] [CrossRef]
- Viezzoli, A.; Christiansen, A.V.; Auken, E.; Sorensen, K. Quasi-3D modeling of airborne TEM data by spatially constrained inversion. Geophysics 2008, 73, F105–F113. [Google Scholar] [CrossRef]
- Goovaerts, P. Geostatistics for Natural Resources Evaluation; Oxford University Press: New York, NY, USA, 1997. [Google Scholar]
- Aerial Photo, Royal Air Force. Available online: https://map.krak.dk/?c=55.641416,11.108969&z=17&l=historic (accessed on 24 February 2020).
- Allred, B.; Martinez, L.; Fessehazion, M.K.; Rouse, G.; Williamson, T.N.; Wishart, D.; Koganti, T.; Freeland, R.; Eash, N.; Batschelet, A. Overall results and key findings on the use of UAV visible-color, multispectral, and thermal infrared imagery to map agricultural drainage pipes. Agric. Water Manag. 2020, 232, 106036. [Google Scholar] [CrossRef]
- Esri. “Imagery” [basemap]. Scale Not Given. “World Imagery”. Service Layer Credits: Source: Esri, DigitalGlobe, GeoEye, Earthstar Geographics, CNES/Airbus DS, USDA, USGS, AeroGRID, IGN, and the GIS User Community. Available online: http://www.arcgis.com/home/item.html?id=10df2279f9684e4a9f6a7f08febac2a9 (accessed on 22 June 2020).
- Prion, S.; Haerling, K.A. Making Sense of Methods and Measurement: Spearman-Rho Ranked-Order Correlation Coefficient. Clin. Simul. Nurs. 2014, 10, 535–536. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef]
- Koganti, T.; Ghane, E.; Martinez, L.R.; Iversen, B.V.; Allred, B.J. Mapping Subsurface Drainage in Agricultural Areas Using Unmanned Aerial Vehicle Imagery and Ground Penetrating Radar. In Proceedings of the 1st Indian Near Surface Geophysics Conference & Exhibition, New Delhi, India, 28–29 November 2019; pp. 76–80. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Site | Location Coordinates * | Soil Type | Date of the GPR Surveys and 3-Days Prior Rainfall # (mm) | Date of the EMI Surveys and 3-Days Prior Rainfall # (mm) | |
|---|---|---|---|---|---|
| Northing (m) | Easting (m) | ||||
| Fensholt upland | 6205900 | 568885 | Sandy/silty clay loam overlain on clay till | 20 September 2016 (0) | 3 September 2014 (0.3) |
| Fensholt lowland | 6204718 | 567145 | Organic soil overlain on clay till | 18 August 2015 (16.4); 21 January 2016 (0.7); 21 September 2016 (0) | 10 September 2015 (0) |
| Silstrup | 6309890 | 478431 | Sandy clay loam/sandy loam topsoil overlain on clay till | 12 November 2015 (19.2) | 16 May 2011 (5.0) |
| Estrup | 6148875 | 504378 | Sandy loam topsoil overlain on clay till | 12 November 2015 (14.0); 28 September 2017 (0.8); 14 August 2018 (34.6) | 5 September 2011 (0.2) |
| Faardrup | 6132550 | 648662 | Loam/sandy loam topsoil overlain on sandy clay till | 9 September 2015 (9.2) | 28 July 2011 (3.1) |
| Holtum | 6204566 | 520304 | Sand and silt | 22 January 2016 (3.1) | 8 October 2015 (13.6) |
| Lillebæk-1 | 6109780 | 610730 | Sand-mixed clay | 24 August 2015 (0) | 1 September 2015 (14.3) |
| Lillebæk-2 | 6110380 | 611557 | Sand-mixed clay | 24 August 2015 (0) | 1 September 2015 (14.3) |
| Lillebæk-3 | 6109685 | 611347 | Sand-mixed clay | 24 August 2015 (0) | 1 September 2015 (14.3) |
| Juelsgaard | 6256750 | 533900 | Loamy sand topsoil overlain on coarse sand, sandy loam and clay till | 21 November 2018 (1.0) | 22 September 2017 (8.3) |
| Kalundborg | 6168000 | 632470 | Sandy loam topsoil overlain on intermediate layer of organic material and sandy clay till | 15 August 2018 (43.0) | 18 August 2016 (0) |
| Lund | 6127000 | 709200 | Clayey sand topsoil overlain on clay till | 28 August 2017 (4.4) | 14 September 2016 (0) |
| Study Site | Time Zero (ns) | Estimated RDP | Success Rate (%) | Estimated Drainage Depth | 3D-GPR Global PD | ||
|---|---|---|---|---|---|---|---|
| (ns) | (m) | (ns) | (m) | ||||
| Fensholt upland | 1.2 | 12 | 10 | 10–18 | 0.4–0.8 | 13–24 | 0.5–1.0 |
| Fensholt lowland * | 1.3 | 10 | 75 | 12–18 22–33 | 0.5–0.8 1.0–1.5 | 22–33 | 1.0–1.5 |
| Silstrup | 1.3 | 10 | 0 | 15–22 | 0.7–1.0 | 22–33 | 1.0–1.5 |
| Estrup * | 1.3 | 12 | 5 | 17–29 | 0.7–1.2 | 24–36 | 1.0–1.5 |
| Faardrup | 1.5 | 10 | 99 | 14–20 | 0.6–0.9 | 23–35 | 1.0–1.5 |
| Holtum | 1.5 | 6 | High # | 10–39 | 0.5–2.3 | 34–42 | 2.0–2.5 |
| Lillebæk-1 | 1.3 | 10 | 25 | 9–16 | 0.4–0.7 | 14–27 | 0.6–1.2 |
| Lillebæk-2 | 1.5 | 10 | 15 | 10–17 | 0.4–0.7 | 14–27 | 0.6–1.2 |
| Lillebæk-3 | 1.3 | 10 | 25 | 9–16 | 0.4–0.7 | 14–27 | 0.6–1.2 |
| Juelsgaard | 1.3 | 12 | 90 | 20–29 | 0.8–1.2 | 48–59 | 2.0–2.5 |
| Kalundborg | 1.3 | 12 | 70 | 10–25 | 0.4–1.0 | 24–36 | 1.0–1.5 |
| Lund | 1.2 | 12 | 0 | 15 | 0.6 | 15–29 | 0.6–1.2 |
| Study Site | 1 m PRP | 1 m HCP | 2 m PRP | 2 m HCP | 4 m PRP | 4 m HCP | EC (0–1.5 m) |
|---|---|---|---|---|---|---|---|
| (mS m−1) | |||||||
| Fensholt upland | 10.4 | 17.7 | 16.5 | 23.7 | X | X | 22.3 |
| Fensholt lowland * | 14.2 | 22.3 | 20.6 | 26.7 | 23.8 | 22.2 | 32.2 |
| Silstrup | 7.6 | 18.2 | 15.3 | 22.7 | X | X | 22.7 |
| Estrup | 12.9 | 28.6 | 23.3 | 35.2 | X | X | 33.0 |
| Faardrup | 7.7 | 14.8 | 14.3 | 19.0 | X | X | 21.3 |
| Holtum * | 4.9 | 5.9 | 6.0 | 8.3 | 9.0 | 6.9 | 9.0 |
| Lillebæk-1 | 12.1 | 21.1 | 19.2 | 27.5 | X | X | 26.4 |
| Lillebæk-2 | 10.6 | 20.0 | 18.1 | 27.4 | X | X | 24.8 |
| Lillebæk-3 | 10.4 | 20.8 | 18.4 | 29.0 | X | X | 24.9 |
| Juelsgaard | 4.6 | 6.7 | 7.6 | 12.3 | X | X | 9.3 |
| Kalundborg | 6.0 | 11.3 | 10.4 | 17.6 | X | X | 13.2 |
| Lund | 10.0 | 16.0 | 16.1 | 21.2 | X | X | 23.0 |
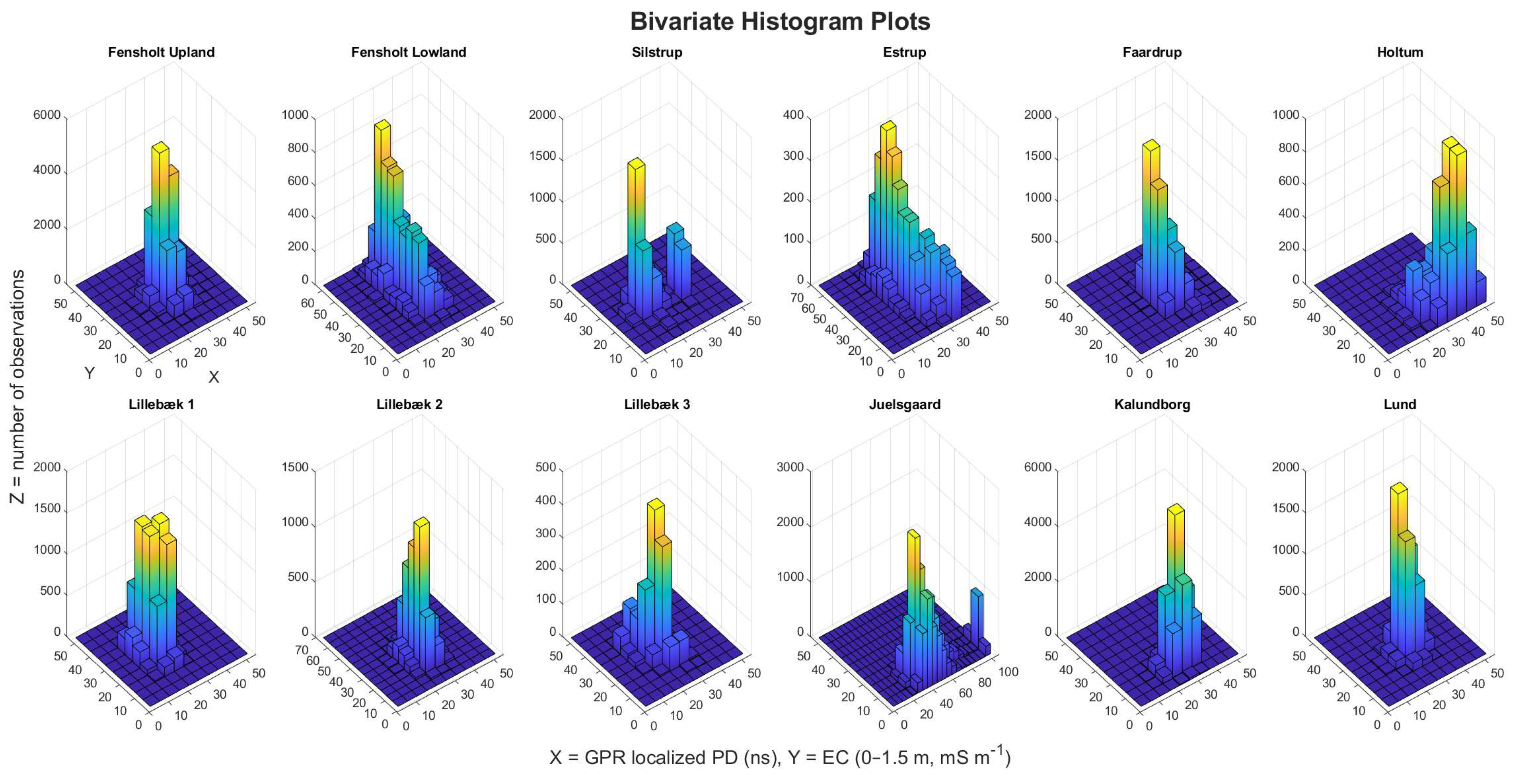
| Study Site | 3D-GPR Localized PD (ns) | EC (0–1.5 m, mS m−1) | ρ | p-Value | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Min | Max | Mean | SD | Min | Max | Mean | SD | |||
| Fensholt upland | 11 | 49 | 27.6 | 3.3 | 9 | 38 | 25.0 | 4.2 | −0.00 | 0.9516 |
| Fensholt lowland | 15 | 36 | 27.8 | 4.3 | 11 | 60 | 38.0 | 11.9 | 0.09 | <0.0001 * |
| Silstrup | 8 | 36 | 21.4 | 8.6 | 7 | 32 | 23.0 | 3.0 | −0.20 | <0.0001 * |
| Estrup | 17 | 36 | 27.5 | 4.3 | 3 | 64 | 33.9 | 14.5 | −0.41 | <0.0001 * |
| Faardrup | 15 | 50 | 28.7 | 3.8 | 7 | 41 | 21.8 | 4.8 | −0.38 | <0.0001 * |
| Holtum | 16 | 50 | 36.7 | 6.4 | 1 | 30 | 10.2 | 4.9 | −0.50 | <0.0001 * |
| Lillebæk-1 | 6 | 36 | 21.7 | 3.0 | 14 | 41 | 26.6 | 5.2 | −0.19 | <0.0001 * |
| Lillebæk-2 | 15 | 36 | 26.3 | 3.2 | 11 | 65 | 24.8 | 6.4 | −0.11 | <0.0001 * |
| Lillebæk-3 | 10 | 36 | 23.4 | 3.9 | 11 | 40 | 25.1 | 5.8 | −0.53 | <0.0001 * |
| Juelsgaard | 16 | 100 | 48.1 | 17.6 | 3 | 20 | 9.2 | 2.7 | −0.05 | <0.0001 * |
| Kalundborg | 8 | 36 | 29.5 | 3.7 | 6 | 25 | 13.5 | 2.6 | −0.00 | 0.9559 |
| Lund | 14 | 36 | 27.3 | 2.9 | 15 | 32 | 23.1 | 3.0 | 0.03 | 0.0101 * |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koganti, T.; Van De Vijver, E.; Allred, B.J.; Greve, M.H.; Ringgaard, J.; Iversen, B.V. Mapping of Agricultural Subsurface Drainage Systems Using a Frequency-Domain Ground Penetrating Radar and Evaluating Its Performance Using a Single-Frequency Multi-Receiver Electromagnetic Induction Instrument. Sensors 2020, 20, 3922. https://doi.org/10.3390/s20143922
Koganti T, Van De Vijver E, Allred BJ, Greve MH, Ringgaard J, Iversen BV. Mapping of Agricultural Subsurface Drainage Systems Using a Frequency-Domain Ground Penetrating Radar and Evaluating Its Performance Using a Single-Frequency Multi-Receiver Electromagnetic Induction Instrument. Sensors. 2020; 20(14):3922. https://doi.org/10.3390/s20143922
Chicago/Turabian StyleKoganti, Triven, Ellen Van De Vijver, Barry J. Allred, Mogens H. Greve, Jørgen Ringgaard, and Bo V. Iversen. 2020. "Mapping of Agricultural Subsurface Drainage Systems Using a Frequency-Domain Ground Penetrating Radar and Evaluating Its Performance Using a Single-Frequency Multi-Receiver Electromagnetic Induction Instrument" Sensors 20, no. 14: 3922. https://doi.org/10.3390/s20143922
APA StyleKoganti, T., Van De Vijver, E., Allred, B. J., Greve, M. H., Ringgaard, J., & Iversen, B. V. (2020). Mapping of Agricultural Subsurface Drainage Systems Using a Frequency-Domain Ground Penetrating Radar and Evaluating Its Performance Using a Single-Frequency Multi-Receiver Electromagnetic Induction Instrument. Sensors, 20(14), 3922. https://doi.org/10.3390/s20143922