Connected Traffic Data Ontology (CTDO) for Intelligent Urban Traffic Systems Focused on Connected (Semi) Autonomous Vehicles


Abstract
1. Introduction
2. Methodology
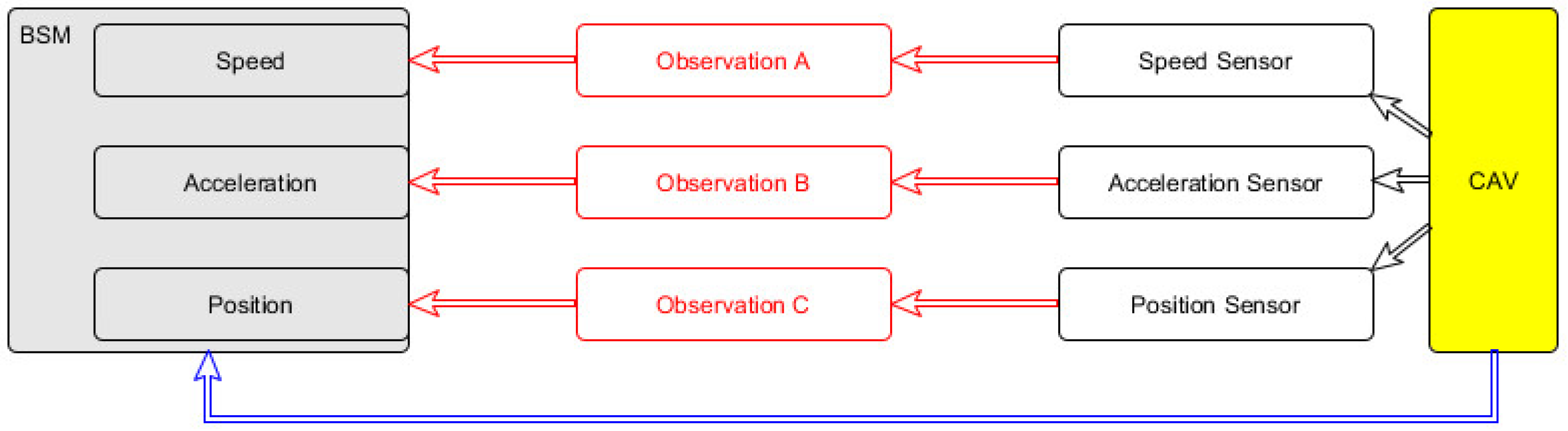
2.1. Vehicle Data Mapping to RDF
- sosa:madeBySensor EXACTLY 1
- sosa:observedProperty EXACTLY 1
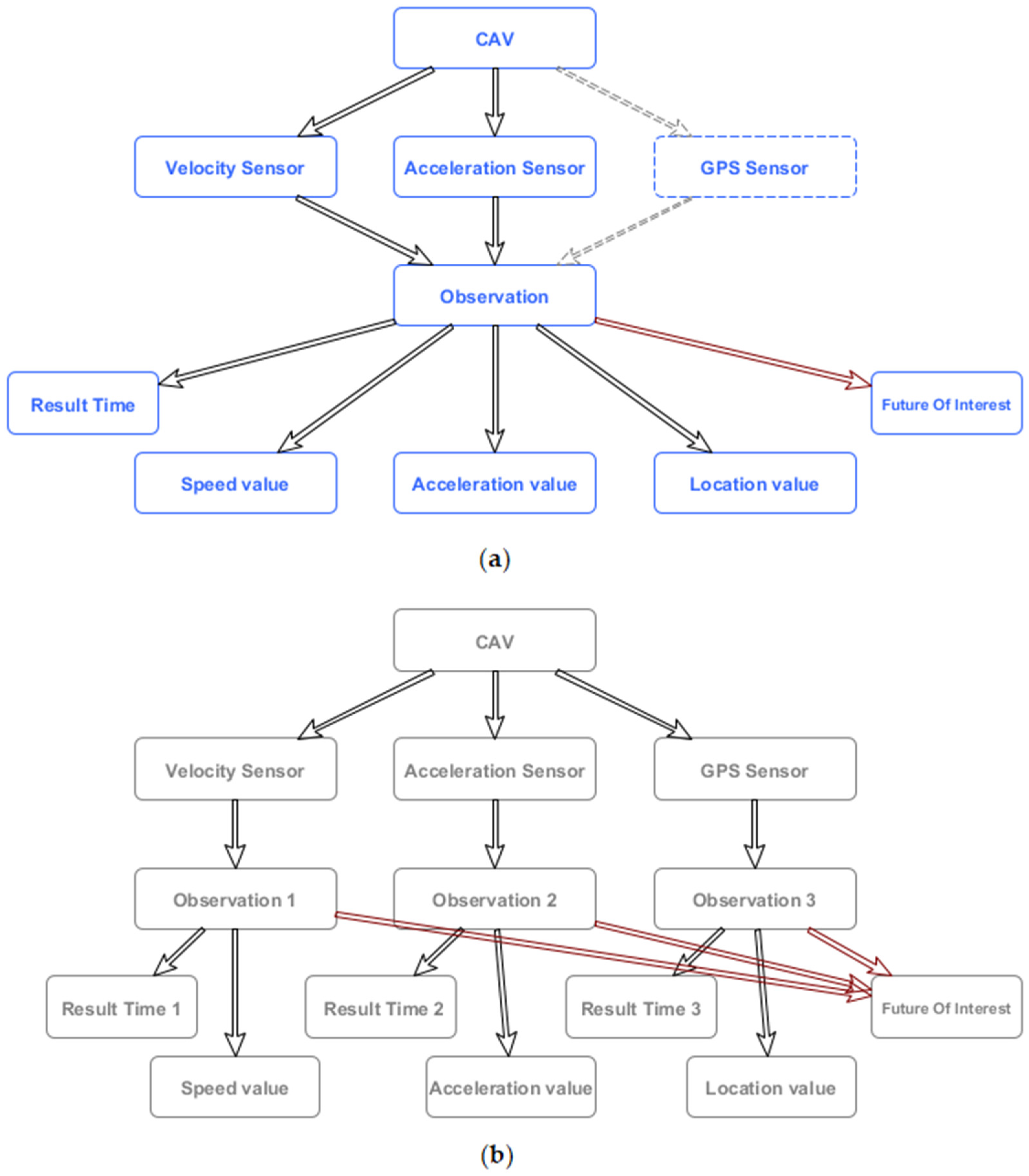
2.2. Development of the New Ontology
2.2.1. Speed
- :hasSpeed
- rdf:type owl:DatatypeProperty;
- rdfs:domain:Vehicle_Sensor_Observation;
- rdfs:range cdt:speed;
- rdfs:subPropertyOf sosa:hasSimpleResult;
- .
2.2.2. Acceleration
- :has Acceleration
- rdf:type owl:DatatypeProperty;
- rdfs:domain:Vehicle_Sensor_Observation;
- rdfs:range cdt:acceleration;
- rdfs:subPropertyOf sosa:hasSimpleResult;
- .
2.2.3. Road Section
- :RoadSection
- rdf:type rdfs:Class;
- rdf:type owl:Class;
- rdf:type sh:NodeShape;
- rdfs:label “Road section”;
- rdfs:subClassOf sosa:Sample;
- :hasRoadSection
- rdf:type owl:ObjectProperty;
- rdfs:domain sosa:FeatureOfInterest;
- rdfs:range sosa:Sample;
- rdfs:subPropertyOf sosa:hasSample;
- owl:inverseOf:isRoadSectionOf;
- .
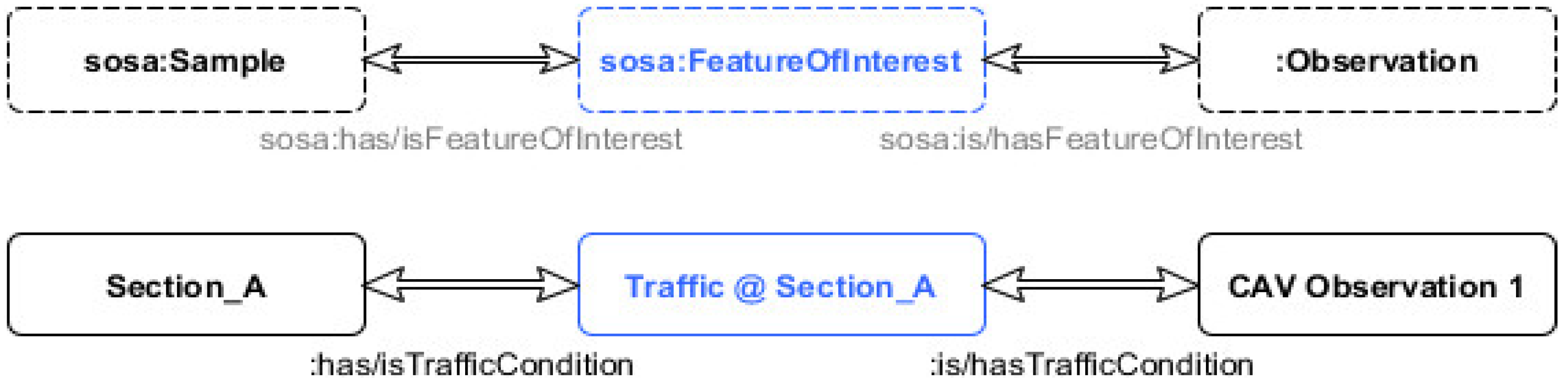
2.2.4. Traffic Conditions
- :TrafficConditions
- rdf:type rdfs:Class;
- rdf:type owl:Class;
- rdf:type sh:NodeShape;
- rdfs:comment “TrafficCondition measurements”;
- rdfs:subClassOf sosa:FeatureOfInterest;
- Represents traffic conditions/intensity at a certain road section, and corresponding property:
- :hasTrafficCondition
- rdf:type owl:ObjectProperty;
- rdfs:comment “TrafficCondition measurements”;
- rdfs:domain:Vehicle_Sensor_Observation;
- rdfs:range:TrafficConditions;
- rdfs:subPropertyOf sosa:hasFeatureOfInterest;
- .
3. Validation
3.1. Apparatus and Data
- System Model: Precision WorkStation T5500
- Processor: Intel(R) Xeon(R) CPU X5660 @ 2.80 GHz, 6 Core(s), 12 Logical Processor(s)
- Total Physical Memory: 12.0 GB
- Available Physical Memory: 7.76 GB
- Total Virtual Memory: 21.0 GB
- Available Virtual Memory: 13.0 GB
- Page File Space: 9.00 GB
- HDD Model: WDC WD3000HLFS-75G6U1
3.2. Memory Improvements
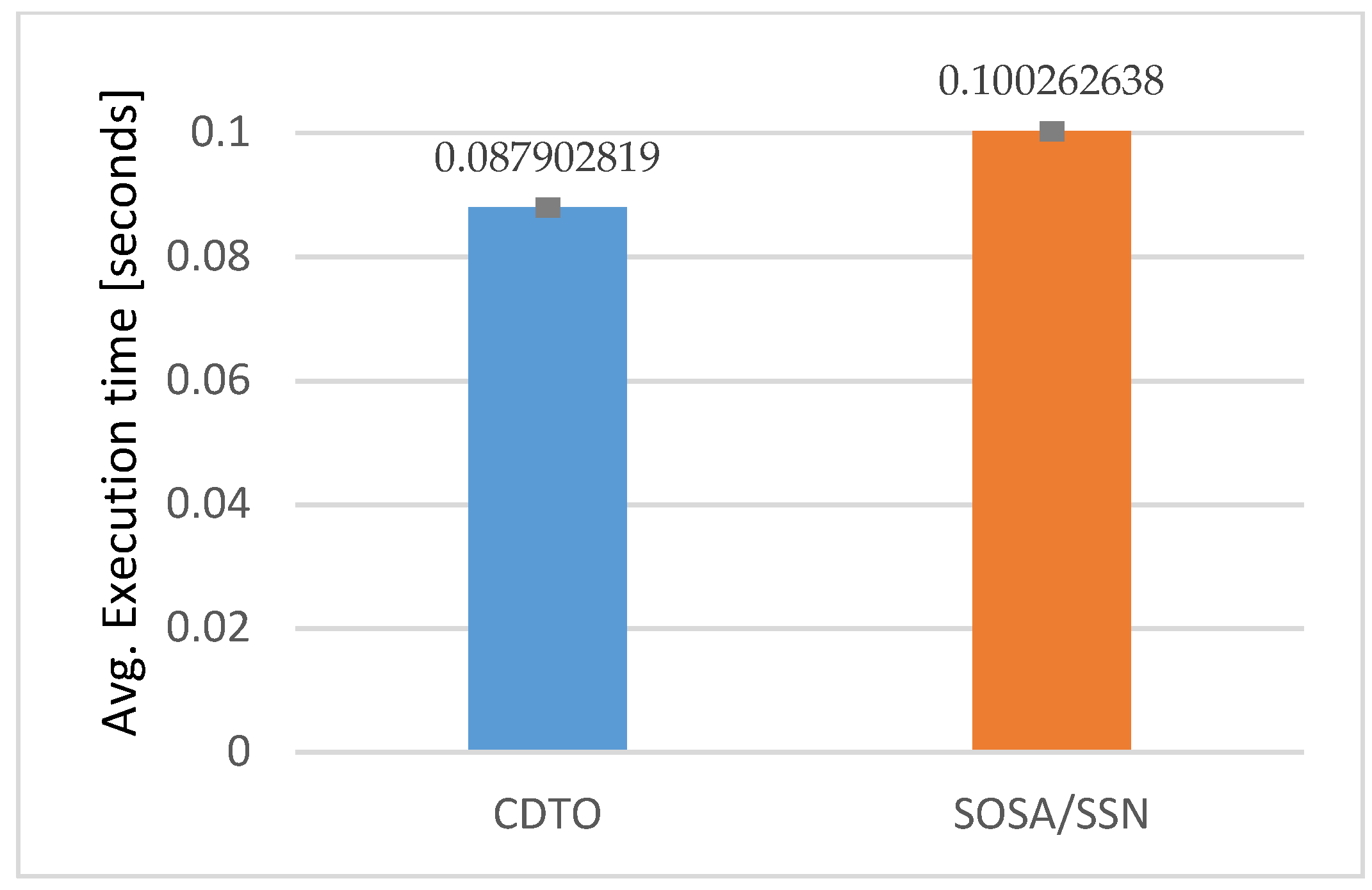
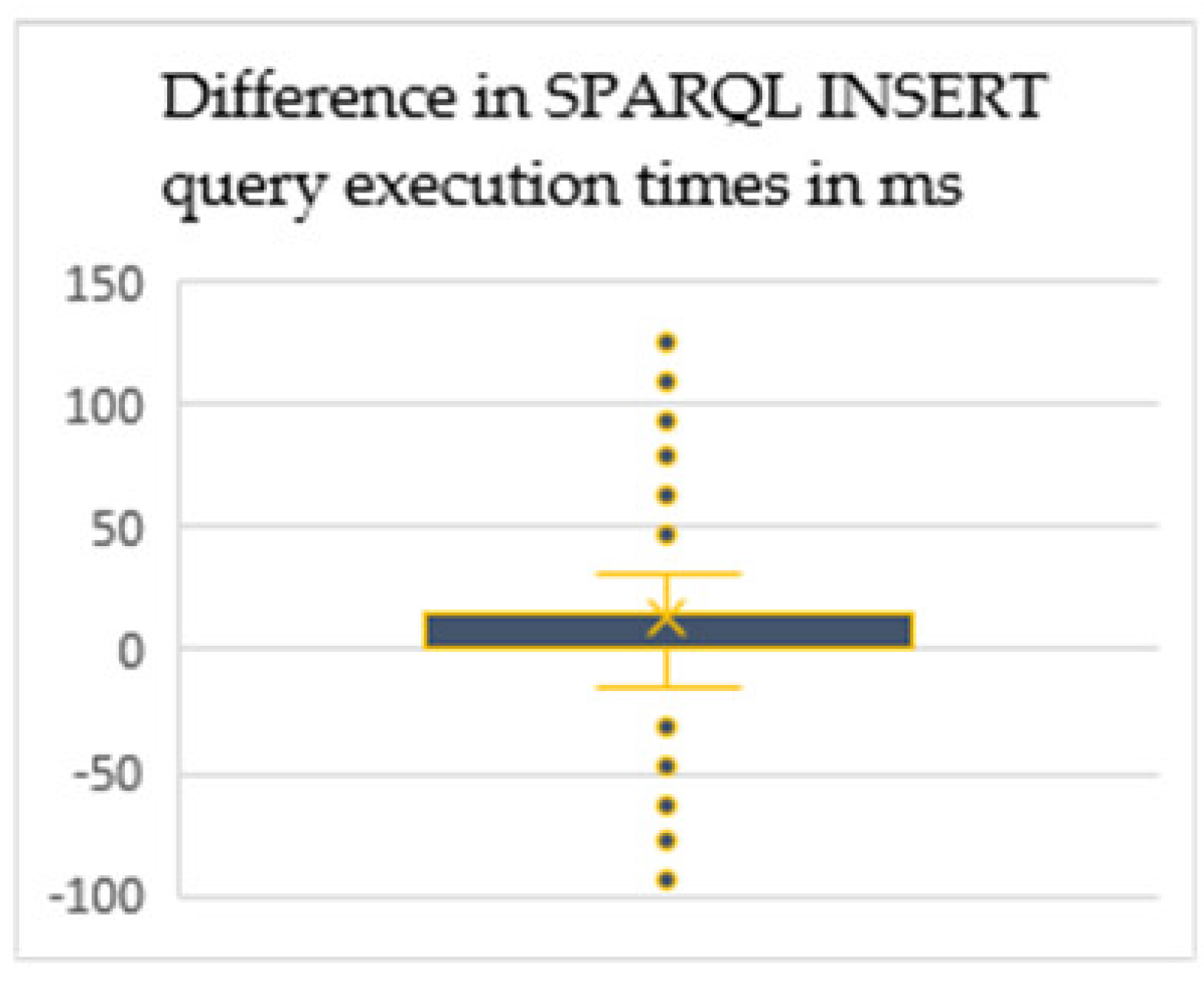
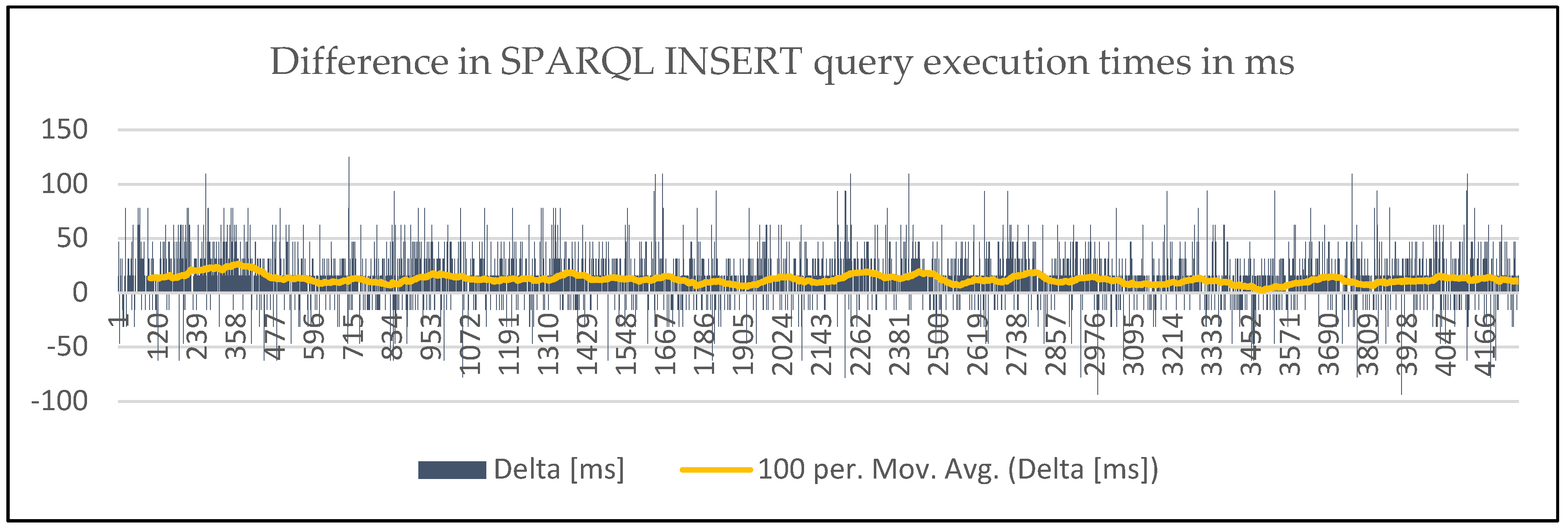
3.3. Query Execution Speed Improvements
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Automated Driving Levels of Driving Automation Are Defined in New Sae International Standard J3016. 2014. Available online: https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic (accessed on 10 May 2020).
- Litman, T.A.; Litman, T. Autonomous Vehicle Implementation Predictions Implications for Transport Planning. 2013. Available online: https://www.vtpi.org/avip.pdf (accessed on 10 May 2020).
- The Self-Driving Car Timeline—Predictions from the Top 11 Global Automakers. Available online: https://www.techemergence.com/self-driving-car-timeline-themselves-top-11-automakers/ (accessed on 10 May 2020).
- Johnson, C.; Walker, J.; Peak Car, C.J. Peak Car Ownership the Market Opportunity of Electric Automated Mobility Services Peak Car Ownership. Available online: https://rmi.org/wp-content/uploads/2017/03/Mobility_PeakCarOwnership_Report2017.pdf (accessed on 10 May 2020).
- About C-ITS. Available online: https://www.car-2-car.org/about-c-its/#c176 (accessed on 10 May 2020).
- Lu, M.; Turetken, O.; Adali, O.E.; Castells, J.; Blokpoel, R.; Grefen, P. Cooperative Intelligent Transport Systems (C-ITS) deployment in Europe: Challenges and key findings. In Proceedings of the 25th ITS World Congress, Copenhagen, Denmark, 17–21 September 2018; p. EU-TP1076. [Google Scholar]
- Roadmap: Services & Sample Use Cases; 2018. Available online: https://www.car-2-car.org/fileadmin/downloads/PDFs/roadmap/CAR2CAR_Roadmap_Nov_2018.pdf (accessed on 10 May 2020).
- Lozano Domínguez, J.M.; Mateo Sanguino, T.J. Review on V2X, I2X, and P2X Communications and Their Applications: A Comprehensive Analysis over Time. Sensors 2019, 19, 2756. [Google Scholar] [CrossRef] [PubMed]
- Krzanich, B. Data Is the New Oil in the Future of Automated Driving | Intel Newsroom. Available online: https://newsroom.intel.com/editorials/krzanich-the-future-of-automated-driving/ (accessed on 10 May 2018).
- Linked Data—W3C. Available online: https://www.w3.org/standards/semanticweb/data (accessed on 16 March 2020).
- Maier, A.; Schnurr, H.P.; Sure, Y. Ontology-based information integration in the automotive industry. Lect. Notes Comput. Sci. (Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform.) 2003, 2870, 897–912. [Google Scholar] [CrossRef]
- Iqbal, R.; Azrifah Azmi Murad, M.; Mustapha, A.; Mohd Sharef, N. An Analysis of Ontology Engineering Methodologies: A Literature Review. Res. J. Appl. Sci. Eng. Technol. 2013, 6, 2993–3000. [Google Scholar] [CrossRef]
- Ding, Y.; Foo, S. Ontology research and development. Part 1—A review of ontology mapping and evolving. J. Inf. Sci. 2002, 123–136. [Google Scholar] [CrossRef]
- Ding, Y.; Foo, S. Ontology research and development. Part 2—A review of ontology mapping and evolving. J. Inf. Sci. 2002, 28, 375–388. [Google Scholar] [CrossRef]
- Kannan, S.; Thangavelu, A.; Kalivaradhan, R. An Intelligent Driver Assistance System (I-DAS) for Vehicle Safety Modelling using Ontology Approach. Int. J. UbiComp 2010, 1, 15–29. [Google Scholar] [CrossRef]
- Armand, A.; Filliat, D.; Ibanez-Guzman, J. Ontology-based context awareness for driving assistance systems. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 227–233. [Google Scholar]
- Zhao, L.; Ichise, R.; Liu, Z.; Mita, S.; Sasaki, Y. Ontology-based driving decision making: A feasibility study at uncontrolled intersections. IEICE Trans. Inf. Syst. 2017, E100D, 1425–1439. [Google Scholar] [CrossRef]
- Stadler, C.; Lehmann, J.; Höffner, K.; Auer, S. LinkedGeoData: A core for a web of spatial open data. Semant. Web 2012, 3, 333–354. [Google Scholar] [CrossRef]
- Perry, M.; Herring, J. OGC GeoSPARQL-A geographic query language for RDF data. OGC Candidate Implement. Stand. 2012, 57. Available online: https://www.ogc.org/standards/geosparql/ (accessed on 10 May 2020).
- Xiong, Z.; Dixit, V.V.; Travis Waller, S. The development of an ontology for driving context modelling and reasoning. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 1–4 November 2016; pp. 13–18. [Google Scholar]
- Viktorović, M.; Yang, D.; de Vries, B.; Baken, N. Semantic web technologies as enablers for truly connected mobility within smart cities. Procedia Comput. Sci. 2019, 151, 31–36. [Google Scholar] [CrossRef]
- Compton, M.; Barnaghi, P.; Bermudez, L.; García-Castro, R.; Corcho, O.; Cox, S.; Graybeal, J.; Hauswirth, M.; Henson, C.; Herzog, A.; et al. The SSN ontology of the W3C semantic sensor network incubator group. J. Web Semant. 2012, 17, 25–32. [Google Scholar] [CrossRef]
- Botts, M.; Robin, A. OGC® SensorML. 2014, 192. Available online: https://repository.oceanbestpractices.org/bitstream/handle/11329/1084/12-000_OGC_SensorML_Model_and_XML_Encoding_Standard_2.0.pdf?sequence=1&isAllowed=y (accessed on 10 May 2020).
- OGC Open Geospatial. Consortium—Observations and Measurements—XML Implement—Version 2.0. OGC® Implement. 2011. [Google Scholar] [CrossRef]
- OGC 15-043r3: Timeseries Profile of Observations and Measurements. Available online: http://docs.opengeospatial.org/is/15-043r3/15-043r3.html (accessed on 10 April 2020).
- Janowicz, K.; Compton, M. The Stimulus-Sensor-Observation Ontology Design Pattern and its Integration into the Semantic Sensor Network Ontology. In Proceedings of the 3rd International Conference on Semantic Sensor Networks, Novermber 2010; Available online: https://www.geog.ucsb.edu/~jano/Semantic_Sensor_Ontology_2010.pdf (accessed on 13 April 2020).
- Janowicz, K.; Haller, A.; Cox, S.J.D.; Le Phuoc, D.; Lefrançois, M. SOSA: A lightweight ontology for sensors, observations, samples, and actuators. J. Web Semant. 2018. [Google Scholar] [CrossRef]
- Klotz, B.; Troncy, R.; Wilms, D.; Bonnet, C. VSSo: The Vehicle Signal and Attribute Ontology. 2018, p. 16. Available online: https://ssn2018.github.io/submissions/SSN2018_paper_4_submitted.pdf (accessed on 10 May 2020).
- Overview: Vehicle Signal Specification. Available online: https://genivi.github.io/vehicle_signal_specification/introduction/overview/ (accessed on 10 April 2020).
- Gerla, M.; Lee, E.-K.; Pau, G.; Lee, U. Internet of vehicles: From intelligent grid to autonomous cars and vehicular clouds. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 241–246. [Google Scholar]
- RDF 1.1 Concepts and Abstract Syntax. Available online: https://www.w3.org/TR/2014/REC-rdf11-concepts-20140225/ (accessed on 10 April 2020).
- Krauss, S.; Wagner, P.; Gawron, C. Metastable states in a microscopic model of traffic flow. Phys. Rev. E 1997, 55, 5597. [Google Scholar] [CrossRef]
- Gora, P.; Rüb, I. Traffic Models for Self-driving Connected Cars. Transp. Res. Procedia 2016, 14, 2207–2216. [Google Scholar] [CrossRef]
- Zanella, A.; Bazzi, A.; Masini, B.M.; Pasolini, G. Performance analysis of multiuser 2-hop systems with random placement of relay nodes. In Proceedings of the 2014 IEEE Global Communications Conference, GLOBECOM 2014, Austin, TX, USA, 8–12 December 2014; pp. 4174–4179. [Google Scholar]
- Ye, L.; Yamamoto, T. Modeling connected and autonomous vehicles in heterogeneous traffic flow. Phys. A Stat. Mech. Appl. 2018, 490, 269–277. [Google Scholar] [CrossRef]
- Morabito, R.; Cozzolino, V.; Ding, A.Y.; Beijar, N.; Ott, J. Consolidate IoT Edge Computing with Lightweight Virtualization. IEEE Netw. 2018, 32, 102–111. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO-Simulation of Urban MObility an Overview. In Proceedings of the Third International Conference on Advances in System Simulation (SIMUL 2011), Barcelona, Spain, 23–28 October 2011. [Google Scholar]
- TraCI—SUMO Documentation. Available online: https://sumo.dlr.de/docs/TraCI.html (accessed on 10 April 2020).
- Apache Jena. Available online: https://jena.apache.org/index.html (accessed on 10 April 2020).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SPARQL Query for Inserting Data into Proposed CTDO Model | Replacement %-Values (Ordered) |
|---|---|
|
prefix: http://milos.viktorovic.com/CAV_V1# //CTDO prefix sosa: <http://www.w3.org/ns/sosa/> prefix cdt: <http://w3id.org/lindt/custom_datatypes#> prefix geo: <http://www.opengis.net/ont/geosparql#> prefix rdfs: <http://www.w3.org/2000/01/rdf-schema#> prefix xsd: <http://www.w3.org/2001/XMLSchema#> INSERT DATA { :Vehicle_Sensor_Observation_%s a :Vehicle_Sensor_Observation; sosa:madeBySensor :Vehicle_Sensor_%s_Speed; sosa:madeBySensor :Vehicle_Sensor_%s_Acceleration; :hasAcceleration “%f m/s2”^^cdt:acceleration; :hasSpeed “%f m/s”^^cdt:speed; :resultLocation “Point(%f %f)”^^geo:wktLiteral; sosa:observedProperty :AccelerationOfVehicle; sosa:observedProperty :SpeedOfVehicle; sosa:resultTime “%s”^^xsd:dateTime; :hasTrafficCondition :TrafficConditions_section_%s; } |
|
| Avg Query Execution Time in ms | CTDO | SOSA/SSN Framework | Delta |
|---|---|---|---|
| Empty graph | 74.04 | 86.88 | 12.84 |
| Partially filled graph | 87.90 | 100.26 | 12.36 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Viktorović, M.; Yang, D.; Vries, B.d. Connected Traffic Data Ontology (CTDO) for Intelligent Urban Traffic Systems Focused on Connected (Semi) Autonomous Vehicles. Sensors 2020, 20, 2961. https://doi.org/10.3390/s20102961
Viktorović M, Yang D, Vries Bd. Connected Traffic Data Ontology (CTDO) for Intelligent Urban Traffic Systems Focused on Connected (Semi) Autonomous Vehicles. Sensors. 2020; 20(10):2961. https://doi.org/10.3390/s20102961
Chicago/Turabian StyleViktorović, Miloš, Dujuan Yang, and Bauke de Vries. 2020. "Connected Traffic Data Ontology (CTDO) for Intelligent Urban Traffic Systems Focused on Connected (Semi) Autonomous Vehicles" Sensors 20, no. 10: 2961. https://doi.org/10.3390/s20102961
APA StyleViktorović, M., Yang, D., & Vries, B. d. (2020). Connected Traffic Data Ontology (CTDO) for Intelligent Urban Traffic Systems Focused on Connected (Semi) Autonomous Vehicles. Sensors, 20(10), 2961. https://doi.org/10.3390/s20102961