Industry 4.0 Lean Shopfloor Management Characterization Using EEG Sensors and Deep Learning

 ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Background
- the need to sustainably empower the workforce (Learning Factory) (LF) as indicated by Narkhede et al. [10],
- the need to develop an autonomous and intelligent process management (PM) (Smart Factory) (SF) as presented by Lee et al. [11],
- the need to cope with increasing complexity of value-stream networks (VSN) as researched by Schuh et al. [12],
- the necessary paradigm shift towards strategic alignment as pointed out by Covey [13].
3. Literature Review
- Focus on pre-defined goals
- Continuous improvement by giving directions
- Balanced Scorecard is a SM system first described by Kaplan et al. [44] in 1992. The prime goal is to enable a balanced view on the driving measures of a business. This works by showing a handful of measurements that allow managers to interpret the complex interactions. Every measurement receives a specific target to motivate the employees to achieve this state. This is in contrast to more traditional approaches. A focus was only set on a few financial performance numbers. These only give a very short-sighted glance on the actual competitiveness of a company.One example of a balanced scorecard implementation is visible in Figure 2a showing the measures of Safety, Quality, Delivery and Value (SQDV). There are many variants in circulation such as Safety, Quality, Delivery and Customer (SQDC) or Quality, Delivery, Inventory, and Productivity (QDIP) that can also show the priorities of a company by including or excluding specific categories such as Environment or Safety.Neely describes the standard way of using BSC [46] through the following steps:
- I
- Check the current performance. See how the development is progressing.
- II
- Communicate performance. Bring everyone to the same understanding of the current state.
- III
- Confirm priorities. Align the actions needed to improve the performance.
- IV
- Compel progress. Systematically achieve better performances.
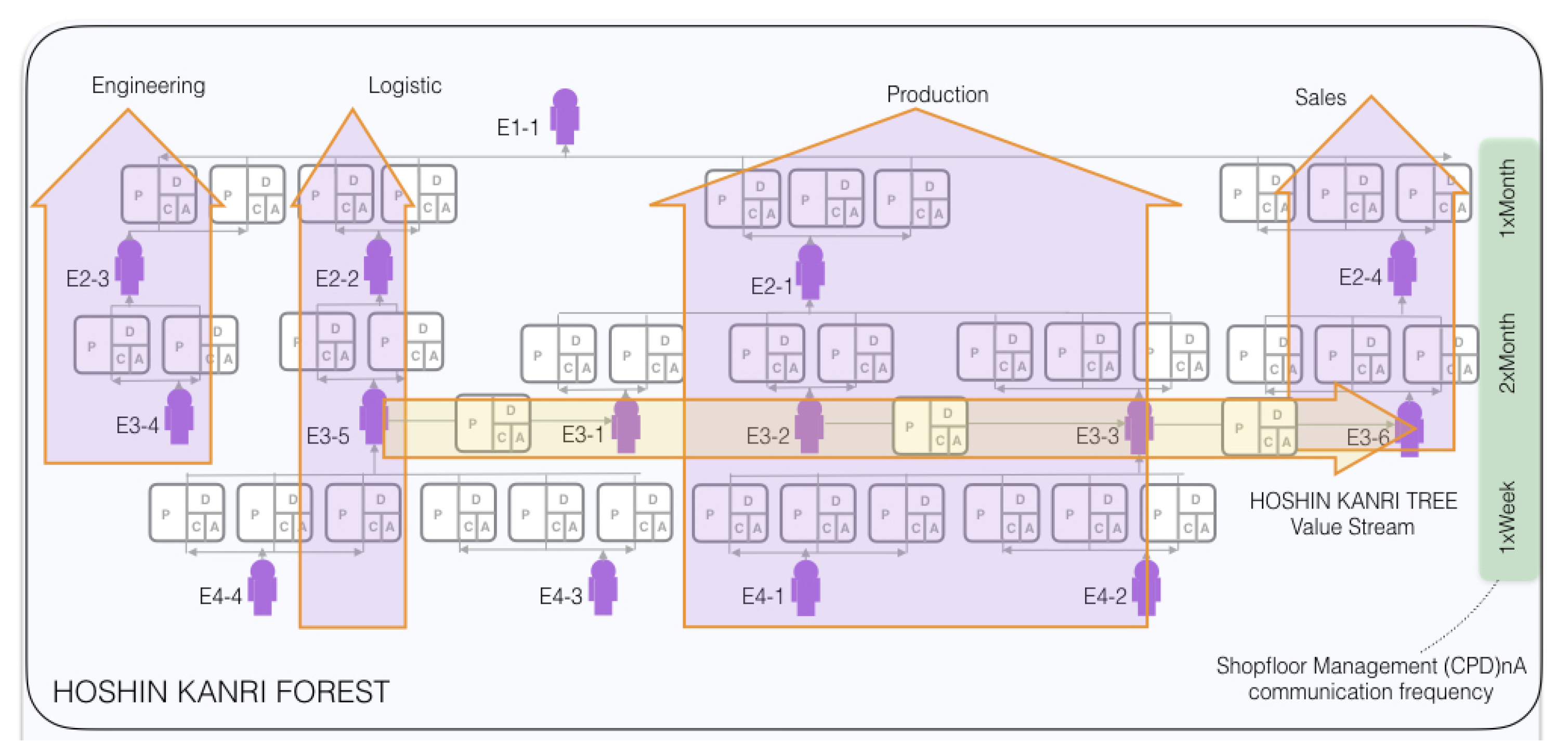
- HKT [45] in contrast is an example of a SM system that focuses on continuous improvement without pre-defined goals. A key feature is the standardization of communication between POs in organizations using the (CPD)nA framework. Based on this, a feedback empowerment loop is implemented which makes it possible to build a sustainable process development.An implementation of the HKT can be seen in Figure 2b. The standard procedure encompasses the following steps as described by Villalba-Diez [49]:
- I
- Evaluating progress. Every PO checks if an improvement has been made to his or her KPI and places either a red or green magnet on his (CPD)nA.
- II
- Reporting progress. Only when the KPI receives a red magnet, does the progress need to be announced. The others can choose.
- III
- (CPD)nA. Every reporting PO ought to follow the (CPD)nA behavioral pattern.
- IV
- Shopfloor visit. One of the (CPD)nAs improvement is checked on site by the complete team.
- Correlation FunctionThe correlation function has found many use cases. It makes it feasible to classify EEG data [54], identify risk levels for developing schizophrenia [55], detect epileptic stages [56] or to classify EEG Motor imagery [57].With it, it is possible to determine the similarities between two signals and many application fields use it. In image processing it is for example used for template matching [58] or local image registration [59]. In geology for the location of earthquakes [60].The cross-correlation function works by sliding one signal along the other, calculating the product between the signals and finding the best fit [61]. Therefore, it is possible to work with time-shifted signals with the cross-correlation function.
- Deep LearningIn the last years DL has become a popular technique for analyzing EEG data and has been used to recognize emotions [62,63], detect Parkinson’s [64] and Alzheimer’s [65] disease, epileptic seizure prediction [66], the detection and diagnosis of seizures [67] or to decode and visualize the EEG data [68].An enormous advantage is that it can handle the complex EEG data with no prior domain knowledge, which allows a wider audience to work with this data. The neural network does this by learning the parameters to detect features from examples [69]. This has made it a popular choice for many other fields such as computer vision [70], audio processing [71] or bioinformatics [72]. The key challenge often hindering the further progress with neural networks is the limited data available. This is a prerequisite to represent a high range of input and parameters.
4. Materials and Methods
4.1. Scope Establishment
4.2. Specifications of Population and Sampling
4.3. Data Collection
- Sampling method: Sequential sampling. Single ADC.
- Sampling rate: 128 samples per second (2048 Hz internal).
- Resolution: 14 bits 1 least significant beat = 0.51 V (16 bit ADC, 2 bits instrumental noise floor discarded), or 16 bits.
- Bandwidth: 0.2–43 Hz, digital notch filters at 50 Hz.
- Filtering: Built in digital 5th order Sinc filter.
- Dynamic range (input referred): 8400 V.
- Coupling mode: AC coupled.
4.4. Data Pre-Processing
4.5. Standardization Procedure
4.6. Data Analysis
4.6.1. Experimental Setup
- CPU (Central Processing Unit): Intel(R) Xeon(R) Gold 6154 CPU @ 3.00 GHz
- GPU (Graphics Processing Unit): NVIDIA Quadro P4000
- RAM (Random-access Memory): 192GB DDR4
4.6.2. Correlation Function
4.6.3. Deep Learning
- Data SegmentationAt first the pre-processed time-dependent EEG data is split into 0.5 s long segments. It is possible to work with shorter or longer segments such as 1 s [27,78], but 0.5 s was chosen because shorter lengths would decrease the amount of information of a data point and longer lengths would decrease the amount of data points that can be used for training.
- Image generationThrough the MNE library [79,80], these time segments are transformed into topographic maps, as shown in Figure 6. The topographic map displays the activity in the brain, using distinct color tones for the different strengths. To show the brain activity for the complete brain and not just the measured points, the points in between the sensors are interpolated, creating a topographic map for the complete brain. Using more sensors would increase the accuracy of the interpolated area.In the example Figure 6 four topographic maps are visible. These show the average brain activity in the first 0.5 s for the four different categories.The values of the 0.5 s segments stretch to the smallest and largest value, displaying the relative differences on the brain using the jet color map as shown in Figure 6e. This was chosen as the full range of colors is used and the color range does not need to be optimized for the human perception as this color range is not intuitive for a human [81]. The lowest values are shown as a dark blue, which turn to a green and then to a dark red with the highest value.The images have a size of 360 × 360 × 3 pixel. A different size could have been chosen. Smaller images could decrease the accuracy and larger images would increase the training time.
- Deep Learning ArchitectureWith these generated images, a neural network can be trained. In this paper a convolutional neural network [82] is used. It has shown astonishing results within the realm of image classification [83,84,85] and is by far the most adopted neural network for physiological signal data processing while also showing excellent results [86]. By using it, a manual feature engineering is unnecessary. In the training phase, the neural network finds the most important features. These become more complex in each convolutional layer.Still, some specifications are set manually. These form the architecture. The coarse architecture of the used neural network can be seen in Figure 7, the exact composition and the code in the Open Access Repository. Parameters that are set include among others the number and the type of layers and the optimizer for the training of the neural network. Here we have chosen the Adam optimizer for the training of the network which stands for adaptive moment estimation [87]. The network architecture comprises four repeated layer groups consisting of a convolution, followed by a rectified linear unit (ReLU) activation and a max pooling layer. After this, the network is flattened and a regular, deeply connected neural network layer follows. To reduce the chance of over-fitting a dropout layer with a ratio of 0.2 is added. The network ends with four outputs that go through the Softmax function to display the probability of the four examined categories.While statistical ways exist to help select some parameters [88,89] and few have become unofficial standards, no clear-cut way to know the best beforehand exist yet. Thus, it is an iterative process of finding the ideal specifications for the architecture by starting with a simple design and seeing which changes improve the results. The final optimal layout therefore depends on multiple factors. More complex features that have to be found in general increase the number of layers needed [90]. But these can also be limited because the training data wouldn’t be sufficient for the increasing number of weights or a limit is reached solely because the hardware requirements can’t be met.
5. Results and Discussion
5.1. Results and Discussion of the Correlation Function
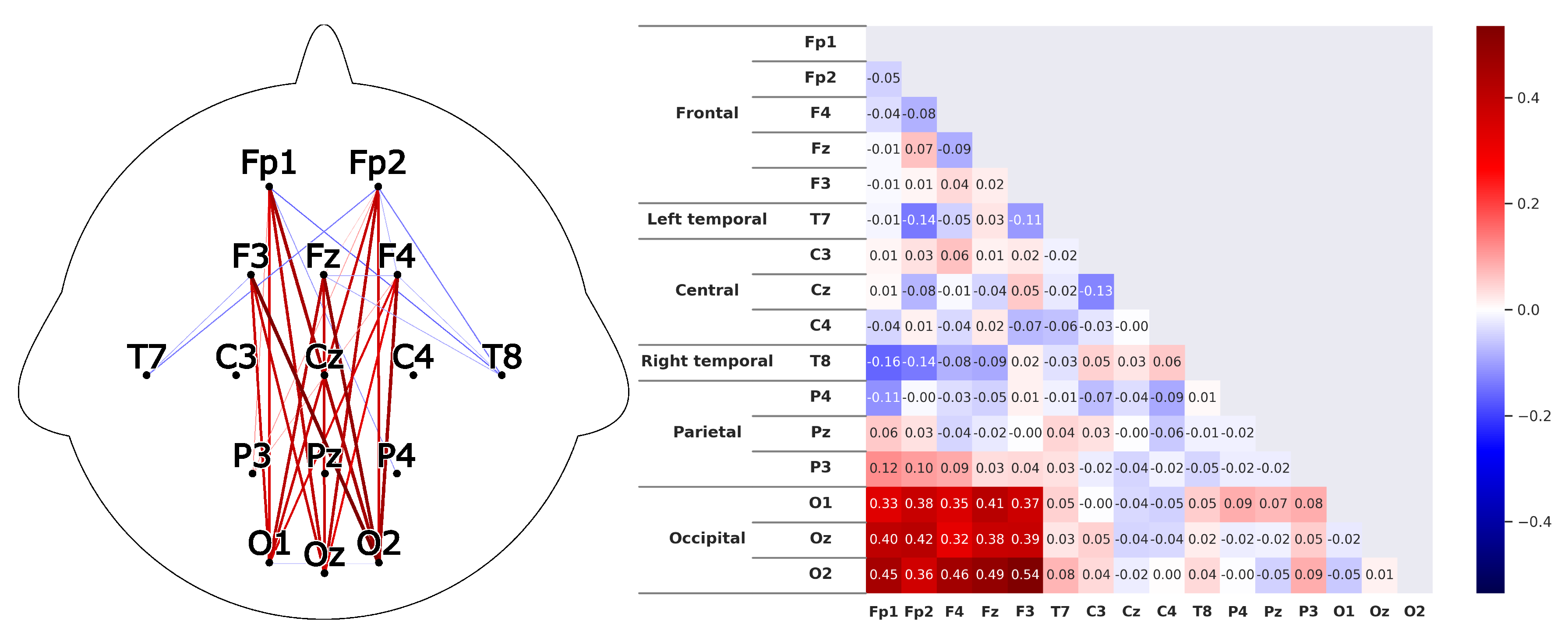
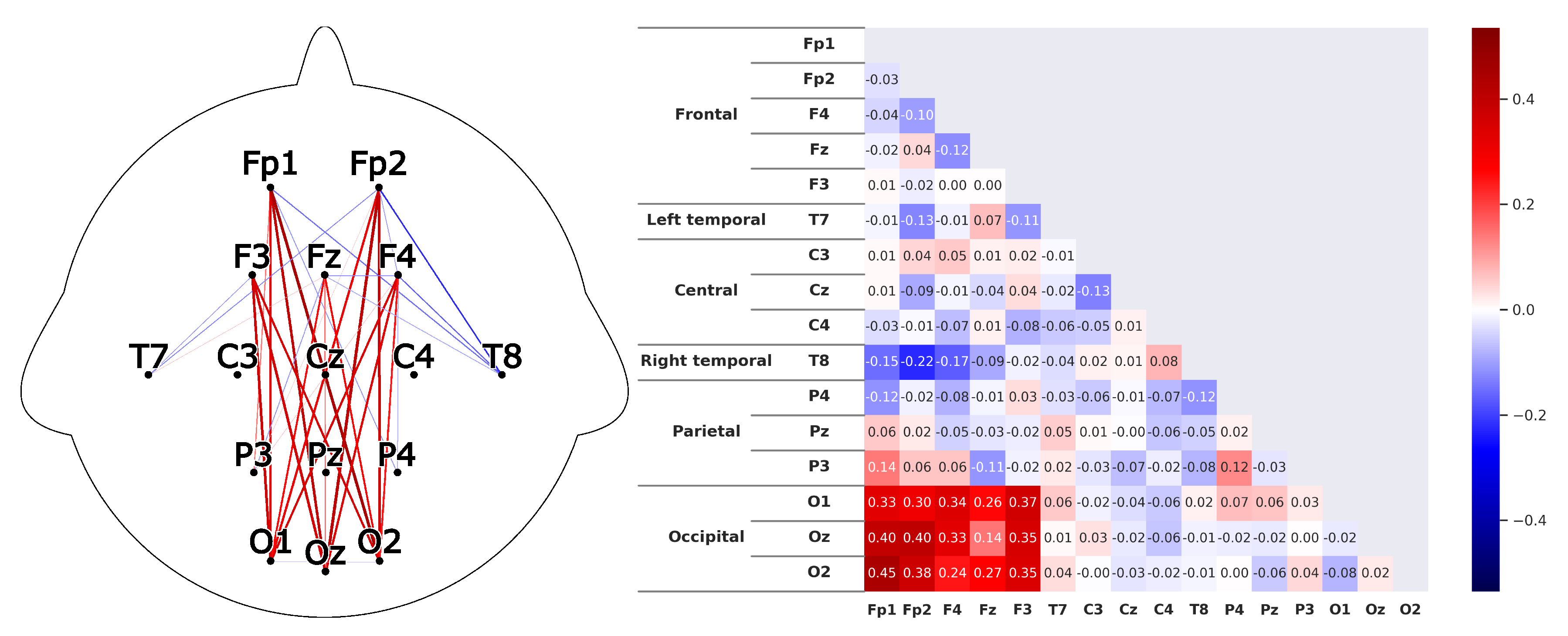
- Corresponding to H1A subject that is listening shows strong correlations between the prefrontal-cortex and the occipital cortex. For the recordings this would mean that a high correlation between the sensors Fp1-F3-Fp2-F4-Fz and O1-Oz-O2 can be found.
- Corresponding to H2A subject that is listening shows significant correlations within the prefrontal-cortex and the occipital cortex. This would be seen in the recordings through high correlations within the sensor groups Fp1-F3-Fp2-F4-Fz and O1-Oz-O2.This is confirmed in Figure 10 and Figure 11. Both HKT and BSC process owner show high correlations within the sensor groups but not between the sensor groups. The values for the frontal sensor group are in the range from 0.6 to 0.74 for the HKT process owner and 0.62 to 0.76 for the BSC process owner. For the occipital group, the values range between 0.55 and 0.72 for the HKT process owner and 0.58 to 0.73 for the BSC process owner. The values between the frontal and occipital sensor groups only reach up to 0.23 for both HKT PO and BSC PO.
- Corresponding to H3To confirm an executive behavioural pattern in the neurological activity, a strong correlation in the PFC should be found. For the recordings this would mean that a high correlation between the sensors Fp1-F3-Fp2-F4-Fz should be expected in all four examined categories.
- Corresponding to H4To conclude hypothesis 4, it is anticipated that strong correlations can be found between the PFC and the TPJ for HKT practitioners.In the EEG recordings this would be confirmed, if strong correlations between the sensors Fp1-F3-Fp2-F4-Fz and T7-T8, as well as P3-P4 can be found.
- Corresponding to H5To conclude hypothesis 5, it is anticipated that only weak correlations can be found between the prefrontal-cortex and the TPJ for BSC practitioners.In the EEG recordings this would be confirmed, if weak correlations between the sensors Fp1-F3-Fp2-F4-Fz and T7-T8 as well as P3-P4 can be found.The results for this hypothesis aren’t as clear-cut as the previous. Although clearly lower correlations such as 0.28 for the correlation Fp1_P3 of the BSC PO can be found, Fp1_T8 for the same category also shows a correlation of 0.65 in Figure 11. What can clearly be seen in the comparison of the BSC PO and the HKT PO in Figure 14, is that a handful of the expected correlations of the BSC PO show a significantly lower value compared to the HKT PO. These are the correlations Fp1_P3, Fp2_T8, F4_T8, Fz_P3, and F3_P3, that on average show a correlation with 0.2 less. This could mean that the right TPJ is less active for the BSC PO. Which in turn would signify that the BSC PO shows weaker activity in the brain region responsible for empathy or more general for the ability to switch between perspectives.The difference between the HKT leader and BSC leader in Figure 15 shows similar results as between HKT PO and BSC PO. This means that the right TPJ is also more active for the HKT leader than for the BSC leader, which would again mean that also the leader of the BSC shows less activity in the brain region linked to the ability to switch between perspectives.
5.2. Results and Discussion of Deep Learning Soft Sensor
- True HKT PO stands for the EEG data of POs practicing the HKT system, that has correctly been classified as a PO practicing HKT.
- False HKT PO stands for all other EEG data, that has falsely been classified as a HKT PO.
- True HKT Leader stands for the EEG data of Leaders practicing the HKT system, that has correctly been classified as a leader practicing HKT.
- False HKT Leader stands for all other EEG data, that has falsely been classified as a HKT Leader.
- True BSC PO stands for the EEG data of POs practicing the BSC system, that has correctly been classified as a PO practicing BSC.
- False BSC PO stands for all other EEG data, that has falsely been classified as a BSC PO.
- True BSC Leader stands for the EEG data of Leaders practicing the BSC system, that has correctly been classified as a leader practicing BSC.
- False BSC Leader stands for all other EEG data, that has falsely been classified as a BSC Leader.
6. Management Conclusions and Future Steps
- The studied SM systems both cause large correlations within the PFC for the PO and the leader. This indicates that both systems and both PO and leader show brain activity that can be considered goal-oriented, which is the core requirement for any kind of improvement.
- Both BSC and HKT show a solid correlation between the PFC and the left TPJ. The left TPJ amongst other functions plays an important role in the strategic planning concerning other people. The difference between BSC and HKT is negligible, but the difference between PO and leader show interesting patterns. Both correlations T7_Fp2 and T7_F3 show noticeable stronger results for the PO. This arises from the different focuses of PO and leader.
- The HKT PO shows substantial correlations of the PFC to the right TPJ. This is especially noticeable in comparison to the results of the BSC participants. The direction-focused approach seems to enable a wider view, allowing diverse positions to be taken into perspective. This is a crucial characteristic for an Industry 4.0 setting where conflicting information needs to be taken into consideration to find optimal improvements that not only shift the focus but ensure sustainable improvements [94]. The HKT leader shows significantly weaker results in this aspect.
- The SM system BSC on the contrary demonstrates weak correlations for the right TPJ to the PFC for both PO and leader, while the leader also shows significantly weaker correlations. The reduced correlations of the PFC to the right TPJ indicate that the contemplated perspectives are restricted and the focus on pre-defined goals limits the aspects that are taken into consideration to receive a goal.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BSC | Balanced Scorecard |
| (CPD)nA | Check-Plan-Do-…-Act |
| dBA | Decibel A-weighting |
| DL | Deep Learning |
| DNN | Deep Neural Network |
| EEG | Electroencephalography |
| HK | HOSHIN KANRI |
| HKT | HOSHIN KANRI TREE |
| KPI | Key Performance Indicator |
| LM | Lean Management |
| PDCA | Plan-Do-Check-Act |
| PFC | Prefrontal Cortex |
| PO | Process Owner |
| SM | Shopfloor Management |
| TPJ | Temporoparietal junction |
| VS | Value Stream |
References
- Lasi, H.; Fettke, P.; Kemper, H.G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242. [Google Scholar] [CrossRef]
- Rüßmann, M.; Lorenz, M.; Gerbert, P.; Waldner, M.; Justus, J.; Engel, P.; Harnisch, M. Industry 4.0: The future of productivity and growth in manufacturing industries. Boston Consult. Group 2015, 9, 54–89. [Google Scholar]
- Gilchrist, A. Industry 4.0: The Industrial Internet of Things; Apress: New York, NY, USA, 2016. [Google Scholar]
- Imran, F.; Kantola, J. Review of industry 4.0 in the light of sociotechnical system theory and competence-based view: A future research agenda for the evolute approach. In Proceedings of the International Conference on Applied Human Factors and Ergonomics; Springer: Berlin/Heidelberg, Germany, 2018; pp. 118–128. [Google Scholar]
- Kopp, R.; Howaldt, J.; Schultze, J. Why Industry 4.0 needs Workplace Innovation: A critical look at the German debate on advanced manufacturing. Eur. J. Workplace Innov. 2016, 2. [Google Scholar] [CrossRef]
- Vaidya, S.; Ambad, P.; Bhosle, S. Industry 4.0—A glimpse. Procedia Manuf. 2018, 20, 233–238. [Google Scholar] [CrossRef]
- Baxter, G.; Sommerville, I. Socio-technical systems: From design methods to systems engineering. Interact. Comput. 2011, 23, 4–17. [Google Scholar] [CrossRef]
- Kagermann, H. Change through digitization—Value creation in the age of Industry 4.0. In Management of Permanent Change; Springer: Berlin/Heidelberg, Germany, 2015; pp. 23–45. [Google Scholar]
- Diez, J.V.; Ordieres-Mere, J.; Nuber, G. The hoshin kanri tree. Cross-plant lean shopfloor management. Procedia CIRP 2015, 32, 150–155. [Google Scholar] [CrossRef][Green Version]
- Narkhede, B.; Nehete, R.; Mahajan, S. Exploring Linkages between Manufacturing Functions, Operations Priorities and Plant Performance in Manufacturing Smes in Mumbai. Int. J. Qual. Res. 2012, 6, 9–22. [Google Scholar]
- Lee, J.; Bagheri, B.; Kao, H.A. Recent advances and trends of cyber-physical systems and big data analytics in industrial informatics. In Proceedings of the International Conference on Industrial Informatics (INDIN), Porto Alegre, Brazil, 27–30 July 2014; pp. 1–6. [Google Scholar]
- Schuh, G.; Potente, T.; Varandani, R.M.; Schmitz, T. Methodology for the assessment of structural complexity in global production networks. Procedia CIRP 2013, 7, 67–72. [Google Scholar] [CrossRef][Green Version]
- Covey, S.R. The 8th Habit: From Effectiveness to Greatness; Simon and Schuster: New York, NY, USA, 2013. [Google Scholar]
- Coleman, P.T. Implicit Theories of Organizational Power and Priming Effects on Managerial Power-Sharing Decisions: An Experimental Study 1. J. Appl. Soc. Psychol. 2004, 34, 297–321. [Google Scholar] [CrossRef]
- Shah, R.; Ward, P.T. Defining and developing measures of lean production. J. Oper. Manag. 2007, 25, 785–805. [Google Scholar] [CrossRef]
- Frow, N.; Marginson, D.; Ogden, S. “Continuous” budgeting: Reconciling budget flexibility with budgetary control. Account. Organ. Soc. 2010, 35, 444–461. [Google Scholar] [CrossRef]
- Jolayemi, J.K. Hoshin kanri and hoshin process: A review and literature survey. Total. Qual. Manag. 2008, 19, 295–320. [Google Scholar] [CrossRef]
- De Leeuw, S.; van den Berg, J.P. Improving operational performance by influencing shopfloor behavior via performance management practices. J. Oper. Manag. 2011, 29, 224–235. [Google Scholar] [CrossRef]
- Suzaki, K. New Shop Floor Management: Empowering People for Continuous Improvement; Simon and Schuster: New York, NY, USA, 1993. [Google Scholar]
- Womack, J.P.; Jones, D.T. Lean Thinking: Banish Waste and Create Wealth in Your Corporation, 2nd ed.; Simon & Schuster: New York, NY, USA, 2003. [Google Scholar]
- Hertle, C.; Siedelhofer, C.; Metternich, J.; Abele, E. The next generation shop floor management—How to continuously develop competencies in manufacturing environments. In Proceedings of the 23rd International Conference on Production Research, Manila, Philippines, 1–4 August 2015. [Google Scholar]
- Davis, S.; Albright, T. An investigation of the effect of balanced scorecard implementation on financial performance. Manag. Account. Res. 2004, 15, 135–153. [Google Scholar] [CrossRef]
- Speckbacher, G.; Bischof, J.; Pfeiffer, T. A descriptive analysis on the implementation of balanced scorecards in German-speaking countries. Manag. Account. Res. 2003, 14, 361–388. [Google Scholar] [CrossRef]
- Doran, M.S.; Haddad, K.; Chow, C.W. Maximizing the success of balanced scorecard implementation in the hospitality industry. Int. J. Hosp. Tour. Adm. 2002, 3, 33–58. [Google Scholar] [CrossRef]
- Schuster, B.; Herrmann, F. Analyse, Beurteilung und Entwicklung eines Umsetzungskonzeptes zur Optimierung des Warengruppenmanagements im Einkauf der Krones AG. AKWI 2017, 5, 14. [Google Scholar]
- Mooraj, S.; Oyon, D.; Hostettler, D. The balanced scorecard: A necessary good or an unnecessary evil? Eur. Manag. J. 1999, 17, 481–491. [Google Scholar] [CrossRef]
- Villalba-Diez, J.; Zheng, X.; Schmidt, D.; Molina, M. Characterization of Industry 4.0 Lean Management Problem-Solving Behavioral Patterns Using EEG Sensors and Deep Learning. Sensors 2019, 19, 2841. [Google Scholar] [CrossRef]
- Kudernatsch, D. Eine Lean-Kultur im Unternehmen verankern. wissensmanagement 2013, 3, 48–49. [Google Scholar]
- Fox, M.D.; Snyder, A.Z.; Vincent, J.L.; Corbetta, M.; Van Essen, D.C.; Raichle, M.E. The human brain is intrinsically organized into dynamic, anticorrelated functional networks. Proc. Natl. Acad. Sci. USA 2005, 102, 9673–9678. [Google Scholar] [CrossRef] [PubMed]
- Buckner, R.L.; Andrews-Hanna, J.R.; Schacter, D.L. The brain’s default network: Anatomy, function, and relevance to disease. In Annals of the New York Academy of Sciences: Volume 1124. The Year in Cognitive Neuroscience 2008; Blackwell Publishing: Hoboken, NJ, USA, 2008. [Google Scholar]
- Gabčanová, I. The employees—The most important asset in the organizations. HUm. Resour. Manag. Ergon. 2011, 5, 30–33. [Google Scholar]
- Miller, E.K.; Cohen, J.D. An integrative theory of prefrontal cortex function. Annu. Rev. Neurosci. 2001, 24, 167–202. [Google Scholar] [CrossRef] [PubMed]
- Samson, D.; Apperly, I.A.; Chiavarino, C.; Humphreys, G.W. Left temporoparietal junction is necessary for representing someone else’s belief. Nat. Neurosci. 2004, 7, 499–500. [Google Scholar] [CrossRef]
- Saxe, R.; Wexler, A. Making sense of another mind: The role of the right temporo-parietal junction. Neuropsychologia 2005, 43, 1391–1399. [Google Scholar] [CrossRef]
- Ogawa, A.; Kameda, T. Dissociable roles of left and right temporoparietal junction in strategic competitive interaction. Soc. Cogn. Affect. Neurosci. 2019, 14, 1037–1048. [Google Scholar] [CrossRef]
- Krall, S.C.; Rottschy, C.; Oberwelland, E.; Bzdok, D.; Fox, P.T.; Eickhoff, S.B.; Fink, G.R.; Konrad, K. The role of the right temporoparietal junction in attention and social interaction as revealed by ALE meta-analysis. Brain Struct. Funct. 2015, 220, 587–604. [Google Scholar] [CrossRef]
- Kaplan, R.S.; Norton, D.P. Linking the balanced scorecard to strategy. Calif. Manag. Rev. 1996, 39, 53–79. [Google Scholar] [CrossRef]
- Figge, F.; Hahn, T.; Schaltegger, S.; Wagner, M. The sustainability balanced scorecard–linking sustainability management to business strategy. Bus. Strategy Environ. 2002, 11, 269–284. [Google Scholar] [CrossRef]
- Kaplan, R.S.; Norton, D.P. Transforming the balanced scorecard from performance measurement to strategic management: Part II. Account. Horizons 2001, 15, 147–160. [Google Scholar] [CrossRef]
- Villalba-Diez, J.; Ordieres-Mere, J. Improving manufacturing operational performance by standardizing process management. Trans. Eng. Manag. 2015, 62, 351–360. [Google Scholar] [CrossRef]
- Imai, M. Gemba Kaizen: A Commonsense Approach to a Continuous Improvement Strategy, 2nd ed.; McGraw-Hill Professional: New York, NY, USA, 2012. [Google Scholar]
- Baba, F. Study on stable facility conservation activities based on PDCA cycle. Yokohama Int. Soc. Sci. Res. 2012, 17, 2–10. [Google Scholar]
- Center, J.M.A.M. PDCA Starting from C Works Faster! Japan Management Association Management Center: Tokyo, Japan, 2013. [Google Scholar]
- Kaplan, R.S.; Norton, D.P. The Balanced Scorecard: Measures that Drive Performance. Harv. Bus. Rev. 1992, 70, 71–79. [Google Scholar]
- Villalba-Diez, J. The Hoshin Kanri Forest: Lean Strategic Organizational Design, 1st ed.; Productivity Press: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Neely, A.D. Measuring Business Performance; Profile Books: London, UK, 1998. [Google Scholar]
- Hines, T. Supply Chain Strategies: Customer Driven and Customer Focused; Taylor & Francis: Abingdon, UK, 2004. [Google Scholar]
- Niven, P.R. Balanced Scorecard: Step-by-Step for Government and Nonprofit Agencies; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Díez, J.V. Hoshin Kanri Forest: Lean Strategic Organizational Design. Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2016. [Google Scholar]
- Krumholz, A.; Wiebe, S.; Gronseth, G.; Shinnar, S.; Levisohn, P.; Ting, T.; Hopp, J.; Shafer, P.; Morris, H.; Seiden, L.; et al. Practice Parameter: Evaluating an apparent unprovoked first seizure in adults (an evidence-based review):[RETIRED]: Report of the Quality Standards Subcommittee of the American Academy of Neurology and the American Epilepsy Society. Neurology 2007, 69, 1996–2007. [Google Scholar] [CrossRef] [PubMed]
- Nuwer, M.R. Quantitative EEG: II. Frequency analysis and topographic mapping in clinical settings. J. Clin. Neurophysiol. 1988, 5, 45–85. [Google Scholar] [CrossRef] [PubMed]
- Neufeld, M.; Blumen, S.; Aitkin, I.; Parmet, Y.; Korczyn, A. EEG frequency analysis in demented and nondemented parkinsonian patients. Dement. Geriatr. Cogn. Disord. 1994, 5, 23–28. [Google Scholar] [CrossRef]
- Coben, L.A.; Danziger, W.L.; Berg, L. Frequency analysis of the resting awake EEG in mild senile dementia of Alzheimer type. Electroencephalogr. Clin. Neurophysiol. 1983, 55, 372–380. [Google Scholar] [CrossRef]
- Chandaka, S.; Chatterjee, A.; Munshi, S. Cross-correlation aided support vector machine classifier for classification of EEG signals. Expert Syst. Appl. 2009, 36, 1329–1336. [Google Scholar] [CrossRef]
- Panischev, O.Y.; Demin, S.; Kaplan, A.Y.; Varaksina, N.Y. Use of cross-correlation analysis of EEG signals for detecting risk level for development of schizophrenia. Biomed. Eng. 2013, 47, 153–156. [Google Scholar] [CrossRef]
- Poulos, M.; Georgiacodis, F.; Chrissikopoulos, V.; Evagelou, A. Diagnostic test for the discrimination between interictal epileptic and non-epileptic pathological EEG events using auto–cross-correlation methods. Am. J. Electroneurodiagn. Technol. 2003, 43, 228–240. [Google Scholar] [CrossRef]
- Krishna, D.H.; Pasha, I.; Savithri, T.S. Classification of EEG motor imagery multi class signals based on cross correlation. Procedia Comput. Sci. 2016, 85, 490–495. [Google Scholar] [CrossRef][Green Version]
- Briechle, K.; Hanebeck, U.D. Template matching using fast normalized cross correlation. In Proceedings of the Optical Pattern Recognition XII. International Society for Optics and Photonics, Orlando, FL, USA, 16–20 April 2001; Volume 4387, pp. 95–102. [Google Scholar]
- Avants, B.B.; Epstein, C.L.; Grossman, M.; Gee, J.C. Symmetric diffeomorphic image registration with cross-correlation: Evaluating automated labeling of elderly and neurodegenerative brain. Med Image Anal. 2008, 12, 26–41. [Google Scholar] [CrossRef] [PubMed]
- Shearer, P.M. Improving local earthquake locations using the L1 norm and waveform cross correlation: Application to the Whittier Narrows, California, aftershock sequence. J. Geophys. Res. Solid Earth 1997, 102, 8269–8283. [Google Scholar] [CrossRef]
- Bracewell, R. Fourier Analysis and Imaging; Springer: Boston, MA, USA, 2012. [Google Scholar]
- Jirayucharoensak, S.; Pan-Ngum, S.; Israsena, P. EEG-based emotion recognition using deep learning network with principal component based covariate shift adaptation. Sci. World J. 2014, 2014. [Google Scholar] [CrossRef] [PubMed]
- Zheng, W.L.; Zhu, J.Y.; Peng, Y.; Lu, B.L. EEG-based emotion classification using deep belief networks. In Proceedings of the 2014 IEEE International Conference on Multimedia and Expo (ICME), Chengdu, China, 14–18 July 2014; pp. 1–6. [Google Scholar]
- Oh, S.L.; Hagiwara, Y.; Raghavendra, U.; Yuvaraj, R.; Arunkumar, N.; Murugappan, M.; Acharya, U.R. A deep learning approach for Parkinson’s disease diagnosis from EEG signals. Neural Comput. Appl. 2018, 1–7. [Google Scholar] [CrossRef]
- Ortiz, A.; Munilla, J.; Gorriz, J.M.; Ramirez, J. Ensembles of deep learning architectures for the early diagnosis of the Alzheimer’s disease. Int. J. Neural Syst. 2016, 26, 1650025. [Google Scholar] [CrossRef]
- Hosseini, M.P.; Soltanian-Zadeh, H.; Elisevich, K.; Pompili, D. Cloud-based deep learning of big eeg data for epileptic seizure prediction. In Proceedings of the 2016 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Washington, DC, USA, 7–9 December 2016; pp. 1151–1155. [Google Scholar]
- Acharya, U.R.; Oh, S.L.; Hagiwara, Y.; Tan, J.H.; Adeli, H. Deep convolutional neural network for the automated detection and diagnosis of seizure using EEG signals. Comput. Biol. Med. 2018, 100, 270–278. [Google Scholar] [CrossRef]
- Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep learning with convolutional neural networks for EEG decoding and visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef]
- Francois, C. Deep Learning with Python; Manning Publications: Shelter Island, NY, USA, 2017. [Google Scholar]
- Voulodimos, A.; Doulamis, N.; Doulamis, A.; Protopapadakis, E. Deep learning for computer vision: A brief review. Comput. Intell. Neurosci. 2018, 2018, 7068349. [Google Scholar] [CrossRef]
- Lee, H.; Pham, P.; Largman, Y.; Ng, A.Y. Unsupervised feature learning for audio classification using convolutional deep belief networks. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 7–10 December 2009; pp. 1096–1104. [Google Scholar]
- Min, S.; Lee, B.; Yoon, S. Deep learning in bioinformatics. Brief. Bioinform. 2017, 18, 851–869. [Google Scholar] [CrossRef]
- Villalba-Diez, J. The Lean Brain Theory. Complex Networked Lean Strategic Organizational Design; CRC Press, Taylor and Francis Group LLC: Boca Raton, FL, USA, 2017. [Google Scholar]
- American Electroencephalographic Society Guidelines in Electroencephalography, Evoked Potentials, and Polysomnography. J. Clin. Neurophysiol. 1994, 11, 1–147.
- Oostenveld, R.; Fries, P.; Maris, E.; Schoffelen, J.M. FieldTrip: Open Source Software for Advanced Analysis of MEG, EEG, and Invasive Electrophysiological Data. Comput. Intell. Neurosci. 2011, 2011, 9. [Google Scholar] [CrossRef] [PubMed]
- Henry, J.C. Electroencephalography: Basic principles, clinical applications, and related fields. Neurology 2006, 67, 2092. [Google Scholar] [CrossRef]
- Adler, J.; Parmryd, I. Quantifying colocalization by correlation: The Pearson correlation coefficient is superior to the Mander’s overlap coefficient. Cytom. Part A 2010, 77, 733–742. [Google Scholar] [CrossRef] [PubMed]
- Längkvist, M.; Karlsson, L.; Loutfi, A. Sleep stage classification using unsupervised feature learning. Adv. Artif. Neural Syst. 2012, 2012, 5. [Google Scholar] [CrossRef]
- Gramfort, A.; Luessi, M.; Larson, E.; Engemann, D.A.; Strohmeier, D.; Brodbeck, C.; Goj, R.; Jas, M.; Brooks, T.; Parkkonen, L.; et al. MEG and EEG data analysis with MNE-Python. Front. Neurosci. 2013, 7, 267. [Google Scholar] [CrossRef]
- Gramfort, A.; Luessi, M.; Larson, E.; Engemann, D.A.; Strohmeier, D.; Brodbeck, C.; Parkkonen, L.; Hämäläinen, M.S. MNE software for processing MEG and EEG data. Neuroimage 2014, 86, 446–460. [Google Scholar] [CrossRef]
- Nuñez, J.R.; Anderton, C.R.; Renslow, R.S. Optimizing colormaps with consideration for color vision deficiency to enable accurate interpretation of scientific data. PLoS ONE 2018, 13, e0199239. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2014; pp. 818–833. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Rim, B.; Sung, N.J.; Min, S.; Hong, M. Deep Learning in Physiological Signal Data: A Survey. Sensors 2020, 20, 969. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Ripley, B.D. Statistical ideas for selecting network architectures. In Neural Networks: Artificial Intelligence and Industrial Applications; Springer: Berlin/Heidelberg, Germany, 1995; pp. 183–190. [Google Scholar]
- Tishby, N.; Zaslavsky, N. Deep learning and the information bottleneck principle. In Proceedings of the 2015 IEEE Information Theory Workshop (ITW), Jerusalem, Israel, 26 April–1 May 2015; pp. 1–5. [Google Scholar]
- Güçlü, U.; van Gerven, M.A. Deep neural networks reveal a gradient in the complexity of neural representations across the ventral stream. J. Neurosci. 2015, 35, 10005–10014. [Google Scholar] [CrossRef] [PubMed]
- Ng, A. Train/Dev/Test sets. 2019. Available online: https://www.coursera.org/lecture/deep-neural-network/train-dev-test-sets-cxG1s (accessed on 8 November 2019).
- Alpaydin, E. Introduction to Machine Learning; Adaptive Computation and Machine Learning; MIT Press: Cambridge, MA, USA, 2004. [Google Scholar]
- Stober, S.; Sternin, A.; Owen, A.M.; Grahn, J.A. Deep feature learning for EEG recordings. arXiv 2015, arXiv:1511.04306. [Google Scholar]
- Villalba-Diez, J.; Ordieres-Meré, J.; Chudzick, H.; López-Rojo, P. NEMAWASHI: Attaining value stream alignment within complex organizational networks. Procedia CIRP 2015, 37, 134–139. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Hypothesis | Interpretation |
|---|---|---|
| H1 | The brain patterns of the leaders are expected to show strong correlations between the prefrontal-cortex and the occipital-cortex. This causes high correlations between the sensors Fp1-Fp2-F3-Fz-F4 and O1-Oz-O2. | This result can be expected, as the leaders are listening for the majority of the time. |
| H2 | In contrast to H1, the brain patterns of the process owners are expected to show significant correlations within the prefrontal-cortex and the occipital-cortex. This could be seen in strong correlations within the sensor groups Fp1-Fp2-F3-Fz-F4 and O1-Oz-O2. | This result can be expected, as the process owner speaks for the majority of the time. |
| H3 | Besides H2, all subjects are expected to show a high correlation of the prefrontal-cortex. This causes high correlations for the sensors Fp1-Fp2-F3-Fz-F4. | This could be understood in that way, that the conducted tasks are all executive behavioural patterns. |
| H4 | The brain patterns of HKT practitioners are expected to show a strong correlation between the prefrontal-cortex and the TPJ. This could be seen by high correlations between the sensors Fp1-Fp2-F3-Fz-F4 and T7-T8 as well as P3-P4. | The interpretation is that HKT is a goal-oriented, context-independent SM problem-solving behavioral pattern. |
| H5 | Compared to HKT, the brain patterns of BSC practitioners are expected to show a weak correlation between the prefrontal-cortex and the TPJ. This could be seen by low correlations between the sensors Fp1-Fp2-F3-Fz-F4 and T7-T8 and P3-P4. | This could be understood in that way, that BSC is a goal-oriented, context-dependent SM problem-solving behavioral pattern. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmidt, D.; Villalba Diez, J.; Ordieres-Meré, J.; Gevers, R.; Schwiep, J.; Molina, M. Industry 4.0 Lean Shopfloor Management Characterization Using EEG Sensors and Deep Learning. Sensors 2020, 20, 2860. https://doi.org/10.3390/s20102860
Schmidt D, Villalba Diez J, Ordieres-Meré J, Gevers R, Schwiep J, Molina M. Industry 4.0 Lean Shopfloor Management Characterization Using EEG Sensors and Deep Learning. Sensors. 2020; 20(10):2860. https://doi.org/10.3390/s20102860
Chicago/Turabian StyleSchmidt, Daniel, Javier Villalba Diez, Joaquín Ordieres-Meré, Roman Gevers, Joerg Schwiep, and Martin Molina. 2020. "Industry 4.0 Lean Shopfloor Management Characterization Using EEG Sensors and Deep Learning" Sensors 20, no. 10: 2860. https://doi.org/10.3390/s20102860
APA StyleSchmidt, D., Villalba Diez, J., Ordieres-Meré, J., Gevers, R., Schwiep, J., & Molina, M. (2020). Industry 4.0 Lean Shopfloor Management Characterization Using EEG Sensors and Deep Learning. Sensors, 20(10), 2860. https://doi.org/10.3390/s20102860