Smart Sensing Using Electromagnetic Waves for Inspection of Defects in Rock Bolts


Abstract
1. Introduction
2. Theoretical Background
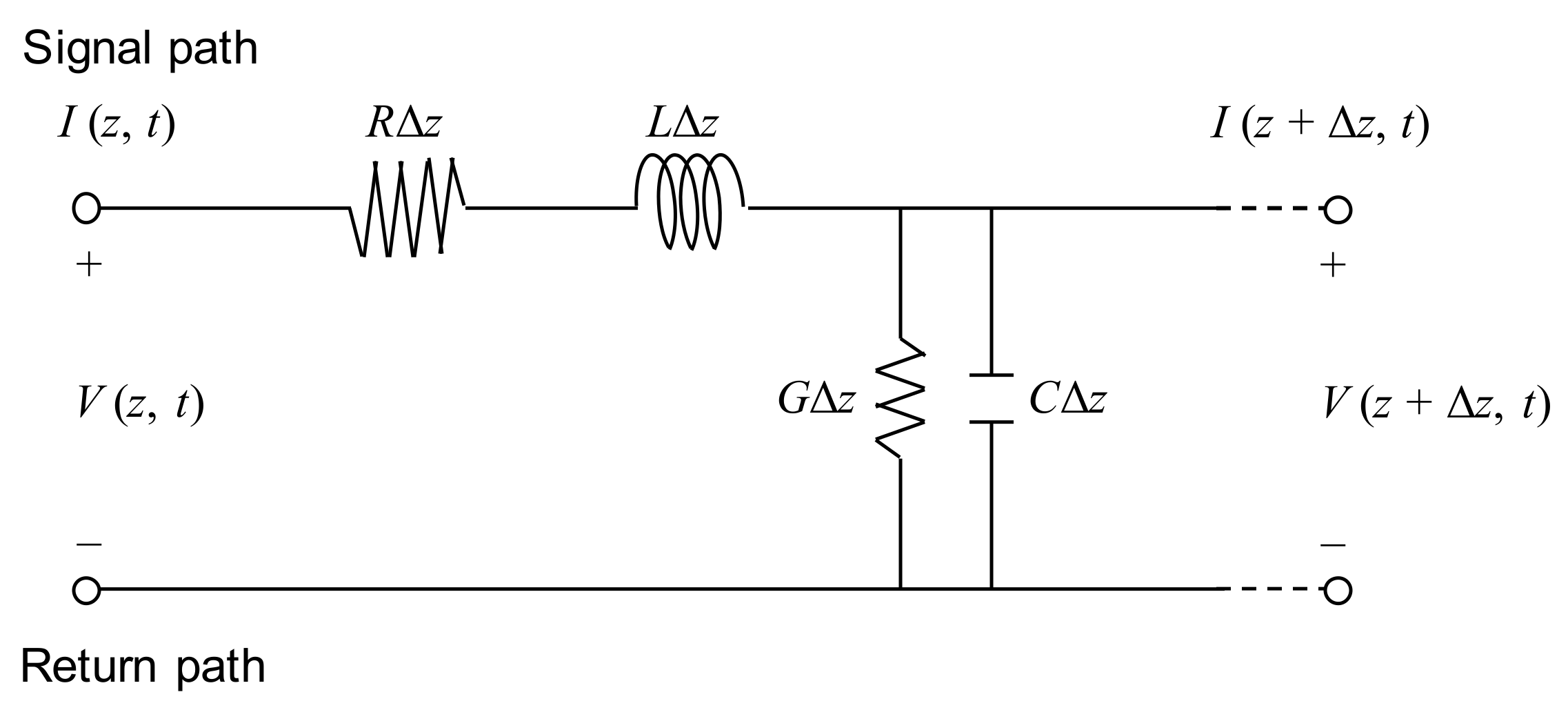
2.1. Transmission Line
2.2. Electromagnetic Waves in Transmission Line
3. Smart Sensing System
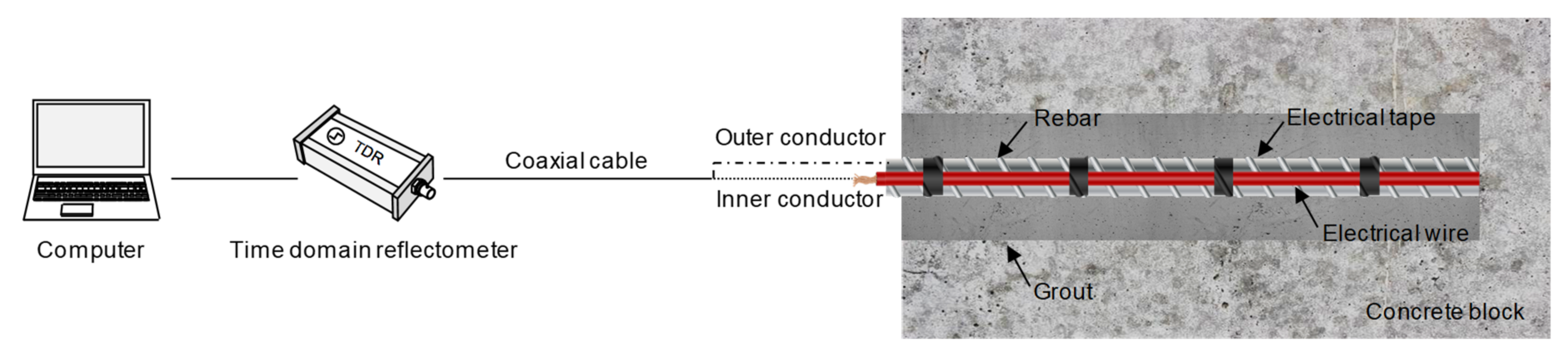
3.1. Configuration of Transmission Line
3.2. Generation and Detection of Electromagnetic Waves
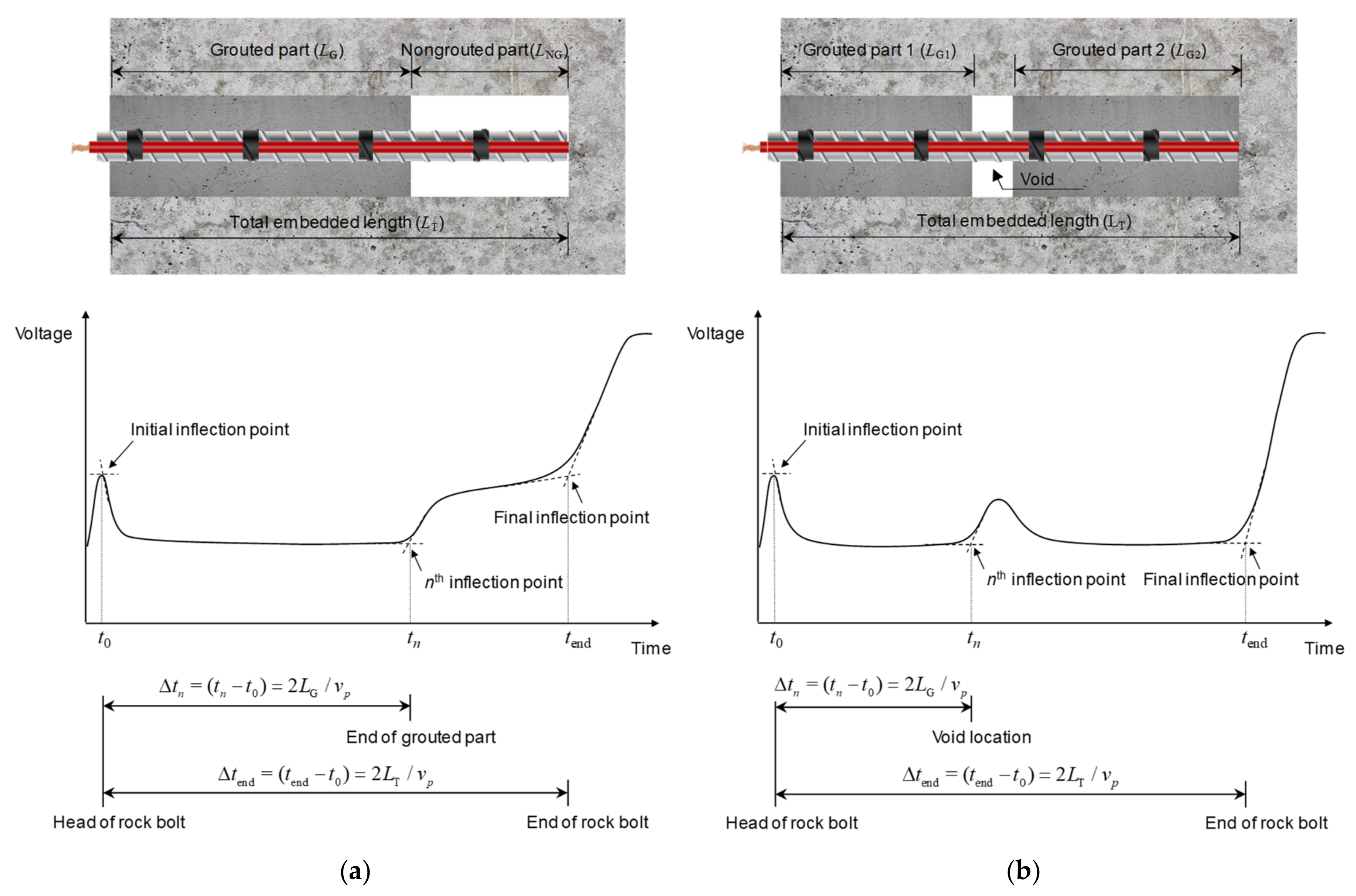
4. Waveform Interpretation
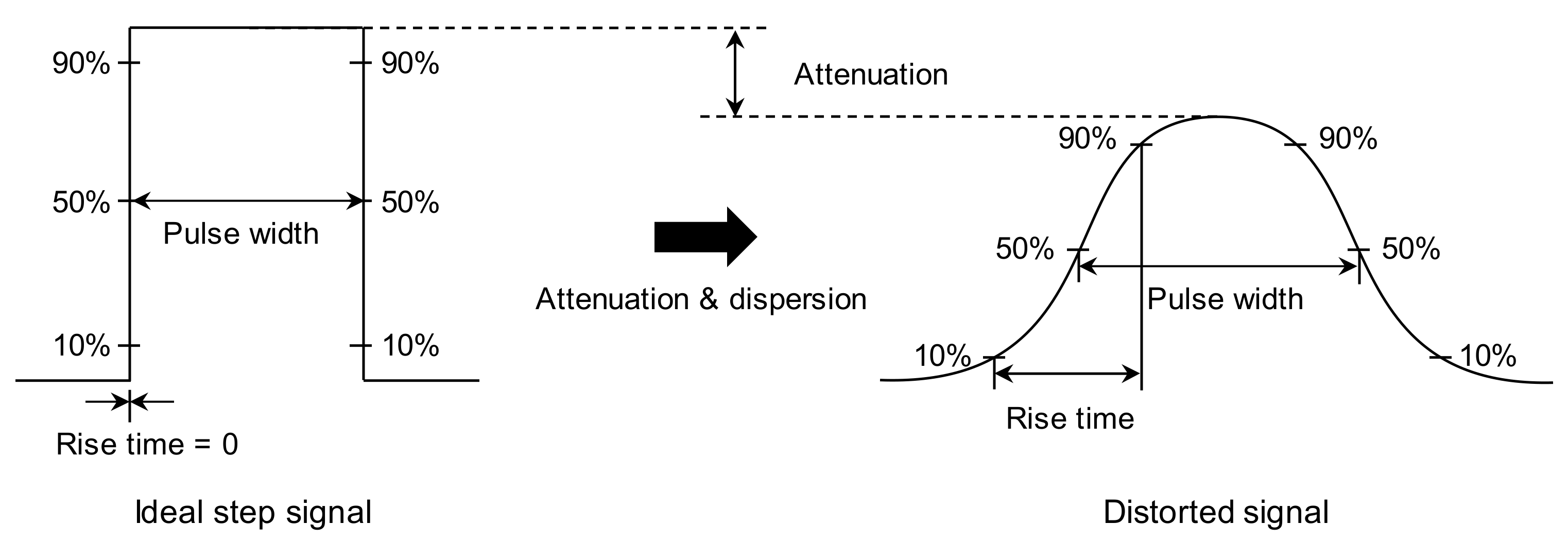
4.1. Signal Distortion
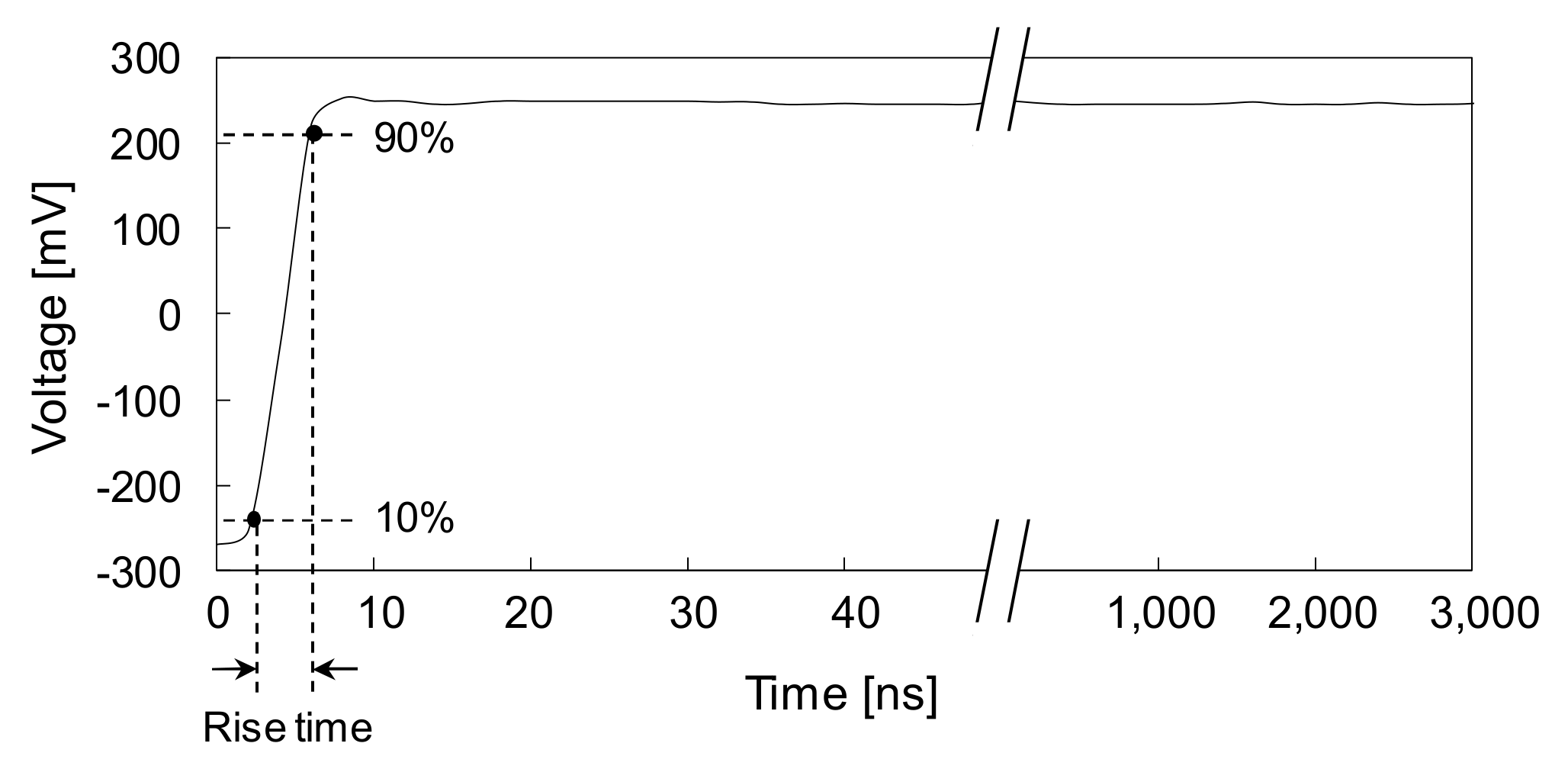
4.2. Determination of Travel Time
5. Experimental Program
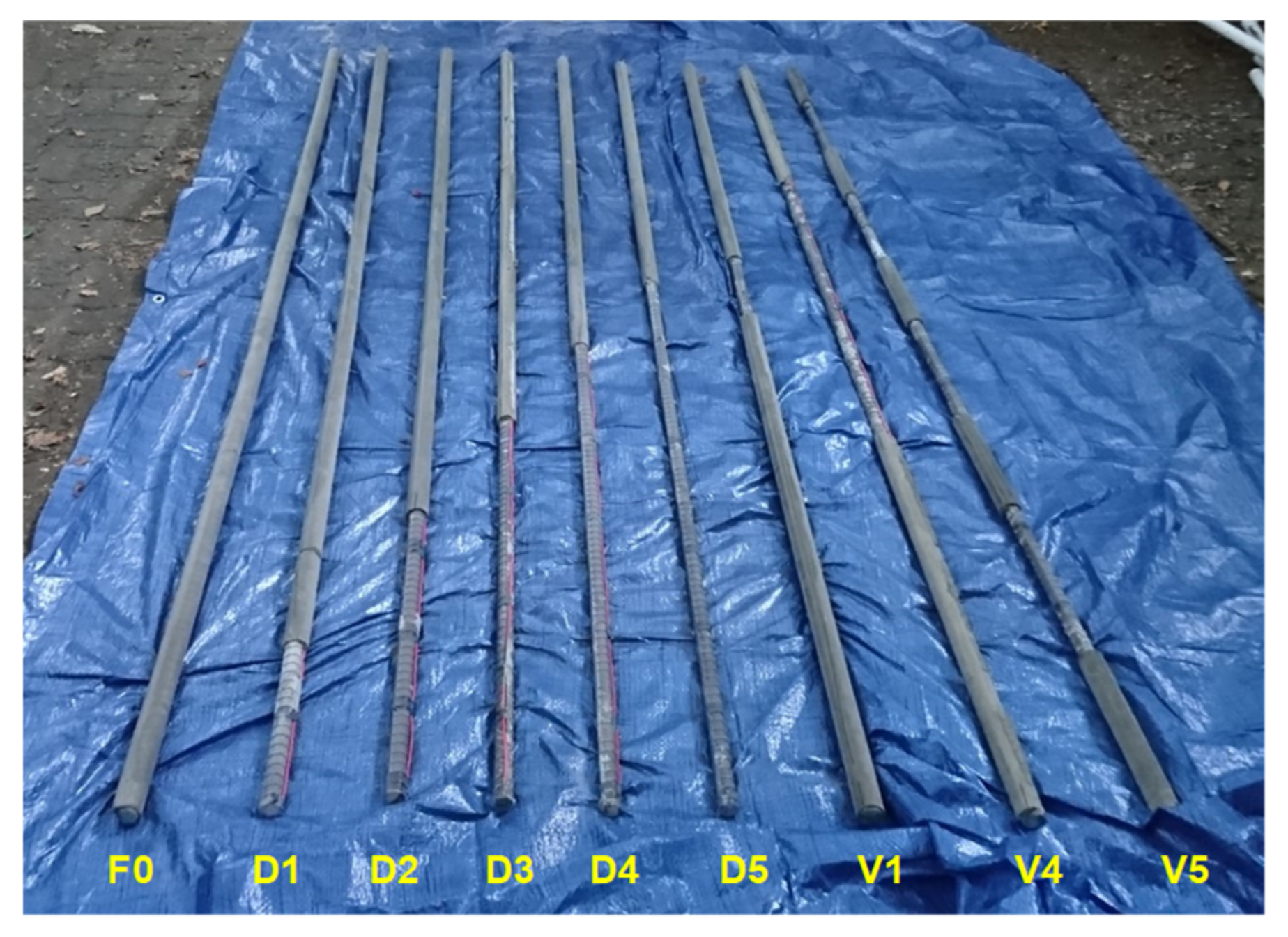
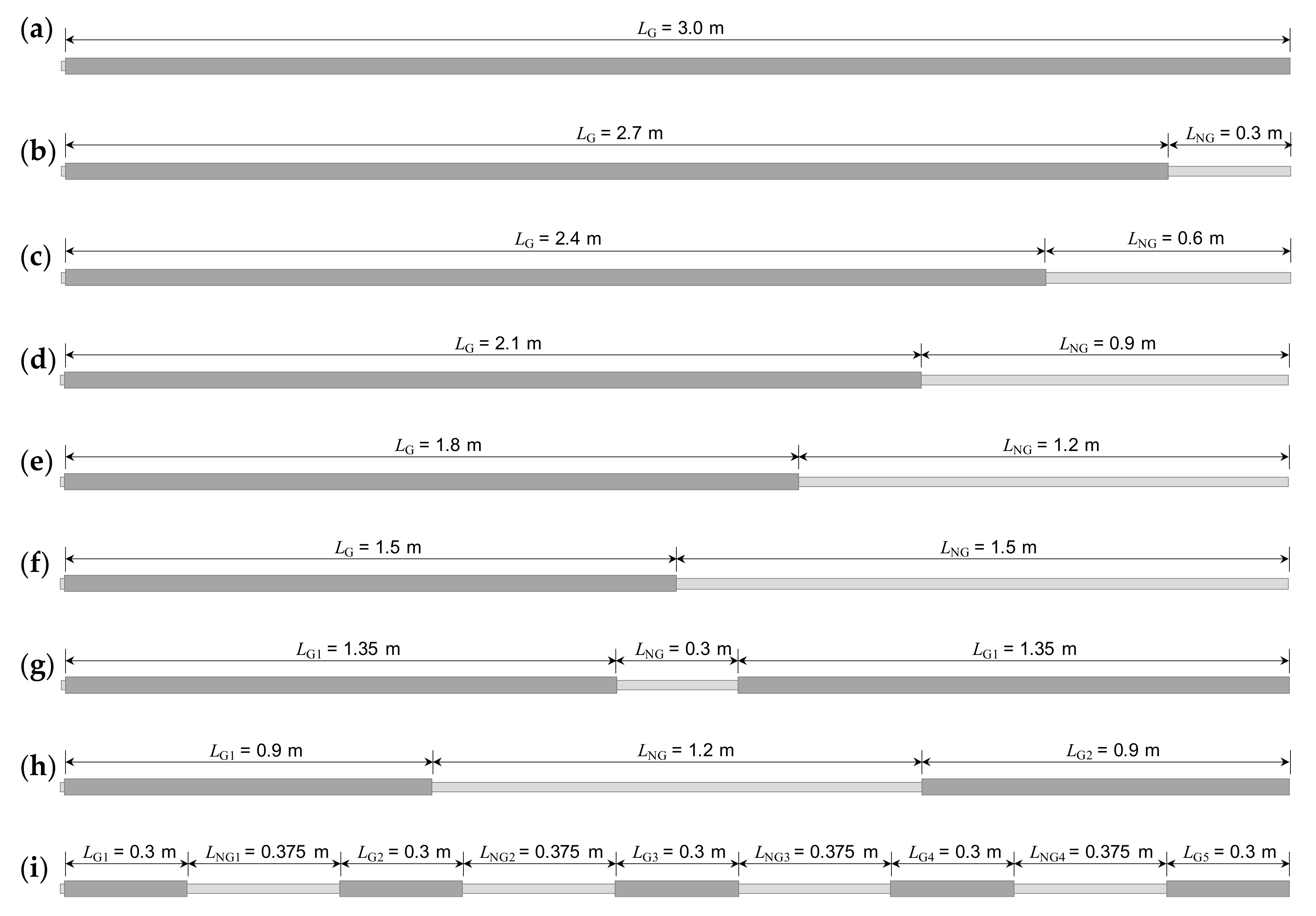
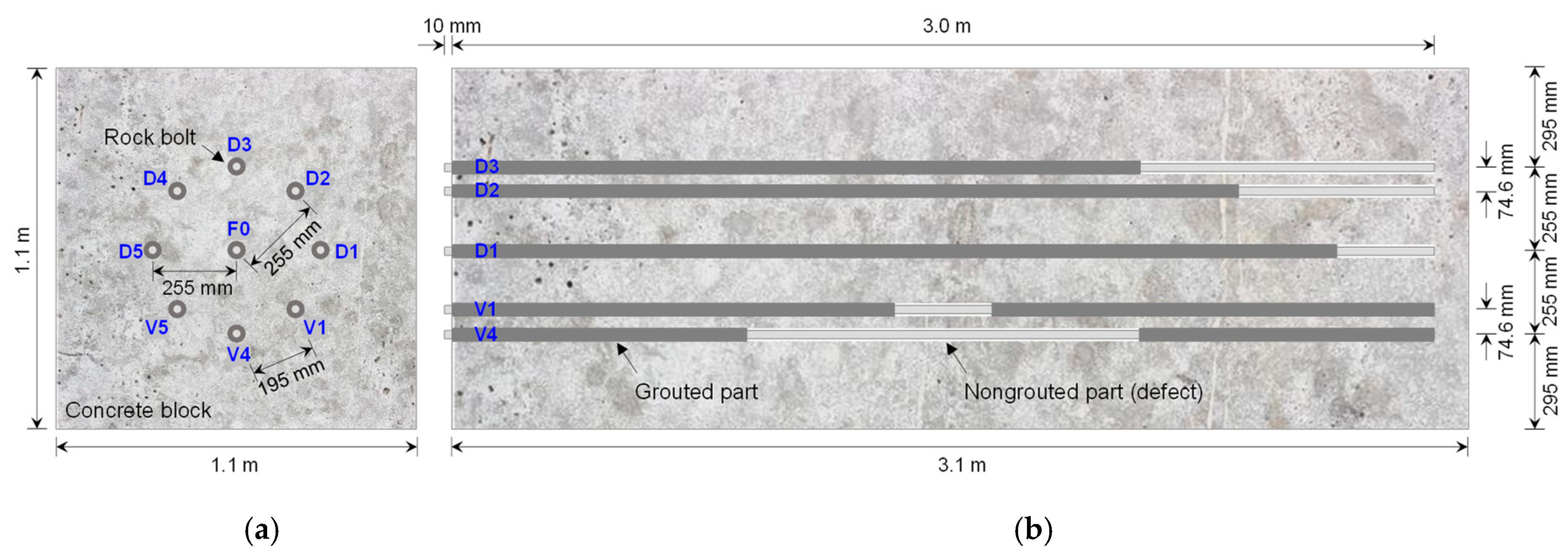
5.1. Construction of Rock Bolt Specimens
5.2. Experimental Results
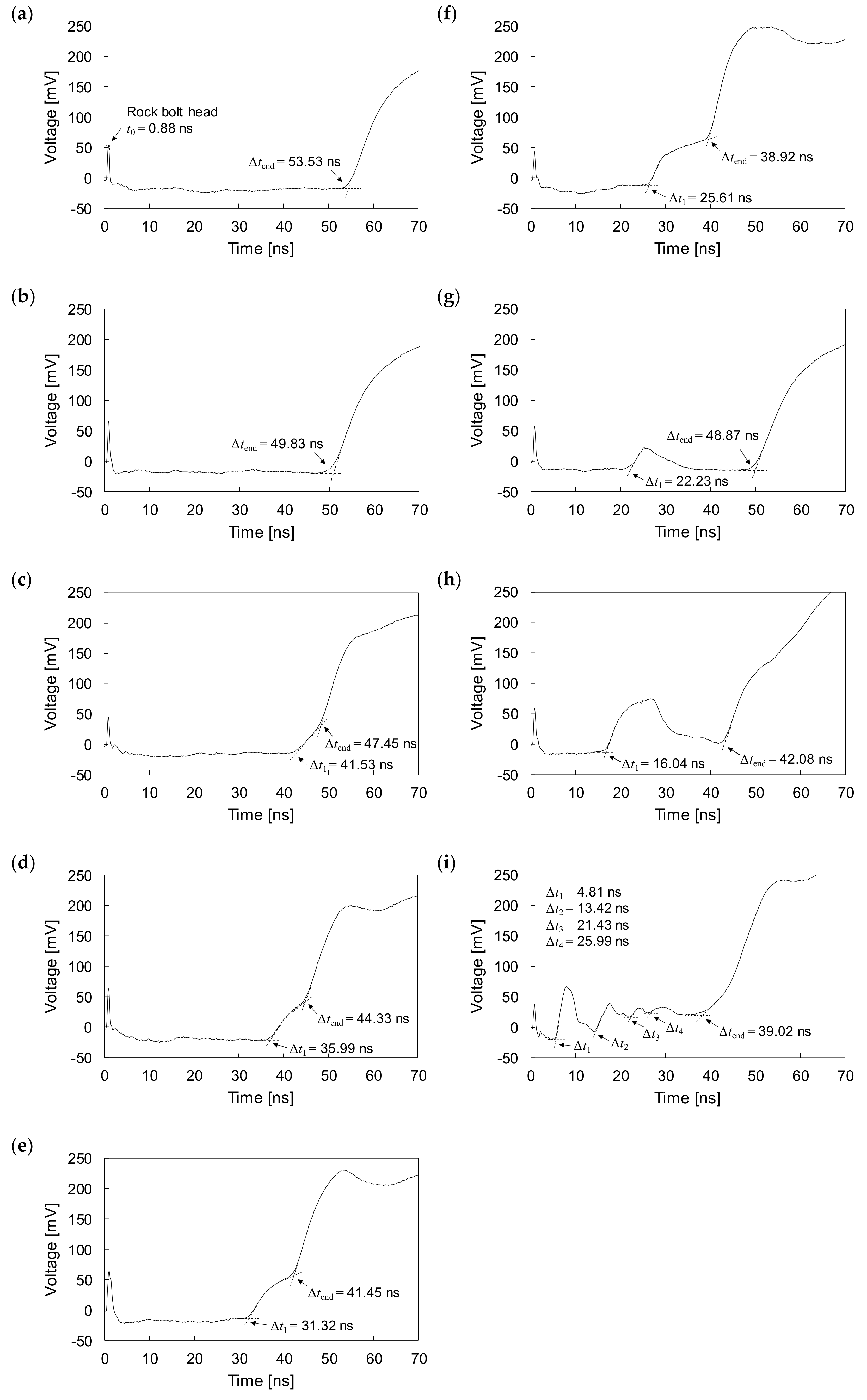
5.2.1. Non-embedded Rock Bolts
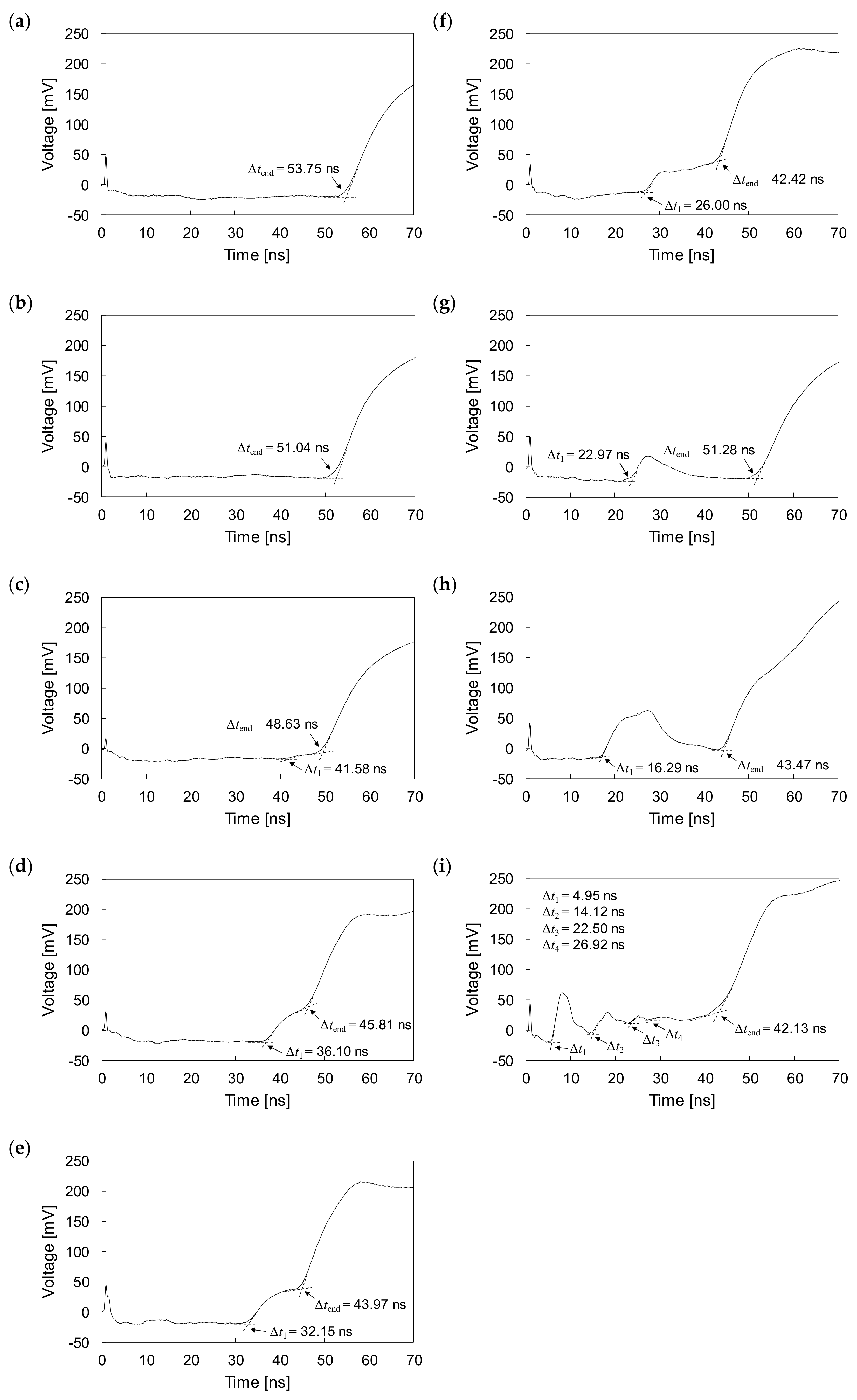
5.2.2. Rock Bolts Embedded in Concrete Block
6. Discussion and Analyses
6.1. Waveform of Measured Signals
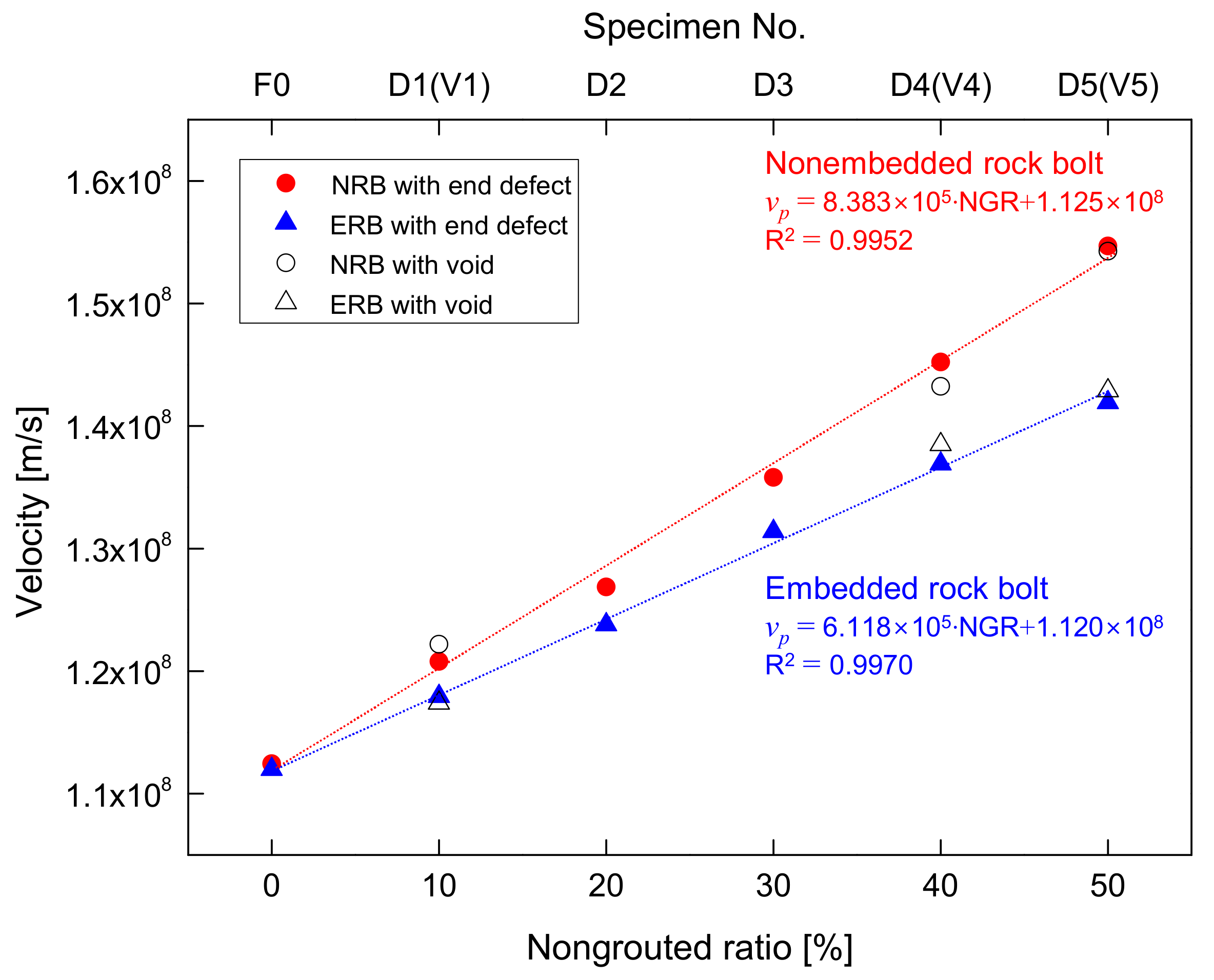
6.2. Velocity of Electromagnetic Waves
6.2.1. Non-embedded Rock Bolts
6.2.2. Rock Bolts Embedded in Concrete Block
6.3. Estimation of Defect Locations
6.3.1. Non-Embedded Rock Bolts
6.3.2. Rock Bolts Embedded in Concrete Block
7. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kılıç, A.; Yaşar, E.; Celik, A. Effect of grout properties on the pull-out load capacity of fully grouted rock bolt. Tunn. Undergr. Space Technol. 2002, 17, 355–362. [Google Scholar] [CrossRef]
- Cao, C.; Jan, N.; Ren, T.; Naj, A. A study of rock bolting failure modes. Int. J. Min. Sci. Technol. 2013, 23, 79–88. [Google Scholar] [CrossRef]
- Chan, R.K.S. Guide to Soil Nail Design and Construction; Geotechnical Engineering Office, Civil Engineering and Development Dept., Government of the Hong Kong Special Administrative Region: Hong Kong, China, 2008.
- Jayawickrama, P.W.; Turner, J.B. Influence of Grout Rheology and Placement Technique on Integrity of Soil Nails. Geo-Congress 2013 2013, 1774–1783. [Google Scholar] [CrossRef]
- Yu, J.-D.; Kim, N.-Y.; Lee, J.-S. Nondestructive Integrity Evaluation of Soil Nails Using Longitudinal Waves. J. Geotech. Geoenviron. Eng. 2018, 144, 04018080. [Google Scholar] [CrossRef]
- Tokarz, S.; Raines, G.; Moral, J. Corrosion-the scourge of steel rock reinforcement. In Proceedings of the 2014 North American Tunneling Conference, Los Angeles, CA, USA, 22–25 June 2014; pp. 86–92. [Google Scholar]
- Sazid, M. Analysis of rockfall hazards along NH-15: A case study of Al-Hada road. Int. J. Geo Eng. 2019, 10, 1. [Google Scholar] [CrossRef]
- Lee, Y.-J.; Rhee, S.K.; Kim, N.-S.; Lee, C. Assessment of expressway construction using Quality Performance Index (QPI). KSCE J. Civ. Eng. 2013, 17, 377–385. [Google Scholar] [CrossRef]
- Mishra, A. Measuring, Understanding, and Improving the Performance of Fully Grouted Resin Bolts in Underground Coal Mines; Southern Illinois University: Carbondale, IL, USA, 2015. [Google Scholar]
- Barry, A.J.; Panek, L.A.; McCormick, J.A. Use of Torque Wrench to Determine Load in Roof Bolts: Slotted-type Bolts; US Department of the Interior, Bureau of Mines: Washington, DC, USA, 1953.
- Zhang, C.; Zou, D.; Madenga, V. Numerical simulation of wave propagation in grouted rock bolts and the effects of mesh density and wave frequency. Int. J. Rock Mech. Min. Sci. 2006, 43, 634–639. [Google Scholar] [CrossRef]
- Zou, D.S.; Cui, Y.; Madenga, V.; Zhang, C. Effects of frequency and grouted length on the behavior of guided ultrasonic waves in rock bolts. Int. J. Rock Mech. Min. Sci. 2007, 44, 813–819. [Google Scholar] [CrossRef]
- Buys, B.J.; Heyns, P.S.; Loveday, P.W. Rock bolt condition monitoring using ultrasonic guided waves. J. S. Afr. Inst. Min. Metall. 2009, 109, 95–105. [Google Scholar]
- Song, G.; Li, W.; Wang, B.; Ho, S.C.M. A Review of Rock Bolt Monitoring Using Smart Sensors. Sensors 2017, 17, 776. [Google Scholar] [CrossRef]
- Beard, M.D.; Lowe, M.J.S.; Cawley, P. Development of a guided wave inspection technique for rock bolts. AIP Conf. Proc. 2002, 615, 1318–1325. [Google Scholar] [CrossRef]
- Madenga, V.; Zou, D.S.; Zhang, C. Effects of curing time and frequency on ultrasonic wave velocity in grouted rock bolts. J. Appl. Geophys. 2006, 59, 79–87. [Google Scholar] [CrossRef]
- Suits, L.D.; Sheahan, T.C.; Han, S.-I.; Lee, I.-M.; Lee, Y.-J.; Lee, J.-S. Evaluation of Rock Bolt Integrity using Guided Ultrasonic Waves. Geotech. Test. J. 2009, 32, 101311. [Google Scholar] [CrossRef]
- Lee, I.-M.; Han, S.-I.; Kim, H.-J.; Yu, J.-D.; Min, B.-K.; Lee, J.-S. Evaluation of rock bolt integrity using Fourier and wavelet transforms. Tunn. Undergr. Space Technol. 2012, 28, 304–314. [Google Scholar] [CrossRef]
- Yu, J.-D.; Bae, M.-H.; Lee, I.-M.; Lee, J.-S. Nongrouted Ratio Evaluation of Rock Bolts by Reflection of Guided Ultrasonic Waves. J. Geotech. Geoenviron. Eng. 2013, 139, 298–307. [Google Scholar] [CrossRef]
- Stepinski, T.; Matsson, K.-J. Rock Bolt Inspection by Means of RBT Instrument. In Proceedings of the 19th World Conference on Non-Destructive Testing, Munich, Germany, 13–17 June 2016; pp. 1–7. [Google Scholar]
- Rucka, M.; Zima, B. Elastic Wave Propagation for Condition Assessment of Steel Bar Embedded in Mortar. Int. J. Appl. Mech. Eng. 2015, 20, 159–170. [Google Scholar] [CrossRef]
- Yu, J.-D.; Byun, Y.-H.; Lee, J.-S. Experimental and numerical studies on group velocity of ultrasonic guided waves in rock bolts with different grouted ratios. Comput. Geotech. 2019, 114, 103130. [Google Scholar] [CrossRef]
- Bačić, M.; Kovačević, M.S.; Kaćunić, D.J. Non-Destructive Evaluation of Rock Bolt Grouting Quality by Analysis of Its Natural Frequencies. Materials 2020, 13, 282. [Google Scholar] [CrossRef]
- Beard, M.D.; Lowe, M.J.S.; Cawley, P. Inspection of rockbolts using guided ultrasonic waves. AIP Conf. Proc. 2001, 557, 1156–1163. [Google Scholar]
- Yu, J.-D.; Kim, K.; Lee, J.-S. Nondestructive health monitoring of soil nails using electromagnetic waves. Can. Geotech. J. 2018, 55, 79–89. [Google Scholar] [CrossRef]
- Lee, J.-S.; Yu, J.-D. Non-destructive Method for Evaluating Grouted Ratio of Soil Nail Using Electromagnetic Wave. J. Nondestruct. Evaluation 2019, 38, 41. [Google Scholar] [CrossRef]
- Marindra, A.M.J.; Tian, G. Chipless RFID Sensor Tag for Metal Crack Detection and Characterization. IEEE Trans. Microw. Theory Tech. 2018, 66, 2452–2462. [Google Scholar] [CrossRef]
- Lee, J.-S.; Song, J.U.; Hong, W.-T.; Yu, J.-D. Application of time domain reflectometer for detecting necking defects in bored piles. NDT E Int. 2018, 100, 132–141. [Google Scholar] [CrossRef]
- Cheng, D.K. Field and Wave Electromagnetics; Addison-Wesley, Reading: Boston, MA, USA, 1989; ISBN 0201528207. [Google Scholar]
- Sadiku, M.N.O. Elements of Electromagnetics 3E; The Oxford Series in Electrical and Computer Engineering; Oxford University Press: Oxford, UK, 2001; ISBN 9780195134773. [Google Scholar]
- Maxwell, J.C. A Treatise on Electricity and Magnetism; Clarendon Press: Oxford, UK, 1881; Volume 1. [Google Scholar]
- Brown, R.G. Lines, Waves, and Antennas: The Transmission of Electric Energy; Ronald Press Co.: New York, NY, USA, 1961. [Google Scholar]
- Bogatin, E. Signal and Power Integrity--Simplified; Pearson Education: Boston, MA, USA, 2010; ISBN 0132349795. [Google Scholar]
- Hernandez-Mejia, J.C.; Perkel, J. Partial Discharge (PD) HV and EHV Power Cable Systems. In Cable Diagnostic Focused Initiative (CDFI); Georgia Tech Research Corporation: Atlanta, GA, USA, 2016; pp. 1–88. [Google Scholar]
- Hernandez-Mejia, J.C. Time Domain Reflectometry. In Cable Diagnostic Focused Initiative (CDFI); Georgia Tech Research Corporation: Atlanta, GA, USA, 2016; pp. 1–45. [Google Scholar]
- Moret-Fernández, D.; López, M.V.; Arrúe, J.L. TDR application for automated water level measurement from Mariotte reservoirs in tension disc infiltrometers. J. Hydrol. 2004, 297, 229–235. [Google Scholar] [CrossRef]
- Robinson, D.A.; Schaap, M.G.; Or, D.; Jones, S.B. On the effective measurement frequency of time domain reflectometry in dispersive and nonconductive dielectric materials. Water Resour. Res. 2005, 41, 1–9. [Google Scholar] [CrossRef]
- Wang, Z.; Kojima, Y.; Lu, S.; Chen, Y.; Horton, R.; Schwartz, R.C. Time Domain Reflectometry Waveform Analysis with Second-Order Bounded Mean Oscillation. Soil Sci. Soc. Am. J. 2014, 78, 1146–1152. [Google Scholar] [CrossRef]
- Jiang, Y.J.; Tayabji, S.D. Analysis of Time Domain Reflectometry Data from LTPP Seasonal Monitoring Program Test Sections; US Department of Transportation, Federal Highway Administration: Washington DC, USA, 1999.
- Klemunes, J. Determining Soil Volumetric Moisture Content Using Time Domain Reflectometry; Federal Highway Administration: Washington, DC, USA, 1998.
- Evett, S.R. The tacq computer program for automatic time domain reflectometry measurements: Ii. waveform interpretation methods. Trans. ASAE 2000, 43, 1947–1956. [Google Scholar] [CrossRef]
- Or, D.; Jones, S.B.; Van Shaar, J.R.; Humphries, S.; Koberstein, L. WinTDR, Users Guide, Version 6.1; Soil Physics Group, Utah State University: Logan, UT, USA, 2004. [Google Scholar]
- Shen, Y.; Cherney, E.A.; Jayaram, S.H. Electric stress grading of composite bushings using high dielectric constant silicone compositions. In Proceedings of the Conference Record of the 2004 IEEE International Symposium on Electrical Insulation ELINSL-04, Toulouse, France, 19–22 September 2005; pp. 320–323. [Google Scholar]
- El-Enein, S.; Kotkata, M.; Hanna, G.; Saad, M.; El Razek, M. Electrical conductivity of concrete containing silica fume. Cem. Concr. Res. 1995, 25, 1615–1620. [Google Scholar] [CrossRef]
- Pawar, S.D.; Murugavel, P.; Lal, D.M. Effect of relative humidity and sea level pressure on electrical conductivity of air over Indian Ocean. J. Geophys. Res. Space Phys. 2009, 114, 1–8. [Google Scholar] [CrossRef]
- Rajabipour, F.; Weiss, J.; Weiss, W.J. Electrical conductivity of drying cement paste. Mater. Struct. 2006, 40, 1143–1160. [Google Scholar] [CrossRef]
- Antonovici, D. Advances in Time Domain Reflectometry characterisation for high speed interconnects. In Proceedings of the 2015 IEEE 21st International Symposium for Design and Technology in Electronic Packaging (SIITME), Braşov, Romania, 22–25 October 2015; pp. 37–40. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimen No | NGR (%) | LT (m) | LNG (m) | Non-Embedded | Embedded | Remarks | ||
|---|---|---|---|---|---|---|---|---|
| Δtend (ns) | vp (108 m/s) | Δtend (ns) | vp (108 m/s) | |||||
| F0 | 0 | 3.0 | 0 | 53.53 | 1.125 | 53.75 | 1.120 | Fully grouted rock bolt |
| D1 | 10 | 3.0 | 0.3 | 49.83 | 1.208 | 51.04 | 1.179 | Defect at the end |
| D2 | 20 | 3.0 | 0.6 | 47.45 | 1.269 | 48.63 | 1.238 | |
| D3 | 30 | 3.0 | 0.9 | 44.33 | 1.358 | 45.81 | 1.314 | |
| D4 | 40 | 3.0 | 1.2 | 41.45 | 1.452 | 43.97 | 1.369 | |
| D5 | 50 | 3.0 | 1.5 | 38.92 | 1.547 | 42.42 | 1.419 | |
| V1 | 10 | 3.0 | 0.3 | 49.26 | 1.222 | 51.28 | 1.174 | One void at the middle |
| V4 | 40 | 3.0 | 1.2 | 42.08 | 1.432 | 43.47 | 1.385 | |
| V5 | 50 | 3.0 | 1.5 | 39.02 | 1.543 | 42.13 | 1.429 | Four voids at intervals of 0.3 m |
| Specimen No | NGR (%) | Δtn (ns) | Defect Location (m) | Error (%) | Remarks | |
|---|---|---|---|---|---|---|
| Estimated | Actual | |||||
| D1 | 10 | - | - | 2.710 | - | Defect at the end |
| D2 | 20 | 41.53 | 2.342 | 2.410 | 2.84 | |
| D3 | 30 | 35.99 | 2.031 | 2.110 | 3.76 | |
| D4 | 40 | 31.32 | 1.769 | 1.810 | 2.29 | |
| D5 | 50 | 25.61 | 1.448 | 1.510 | 4.13 | |
| V1 | 10 | 22.23 | 1.258 | 1.360 | 7.50 | One void at the middle |
| V4 | 40 | 16.04 | 0.910 | 0.910 | 0.03 | |
| V5 | 50 | 4.81 | 0.280 | 0.310 | 9.75 | Four voids at intervals of 0.3 m |
| 13.42 | 0.980 | 0.985 | 0.54 | |||
| 21.43 | 1.645 | 1.660 | 0.89 | |||
| 25.99 | 2.118 | 2.335 | 9.31 | |||
| Specimen No | NGR (%) | Δtn (ns) | Defect Location (m) | Error (%) | Remarks | |
|---|---|---|---|---|---|---|
| Estimated | Actual | |||||
| D1 | 10 | - | - | 2.710 | - | Defect at the end |
| D2 | 20 | 41.58 | 2.334 | 2.410 | 3.16 | |
| D3 | 30 | 36.10 | 2.028 | 2.110 | 3.89 | |
| D4 | 40 | 32.15 | 1.807 | 1.810 | 0.16 | |
| D5 | 50 | 26.00 | 1.463 | 1.510 | 3.10 | |
| V1 | 10 | 22.97 | 1.294 | 1.360 | 4.86 | One void at the middle |
| V4 | 40 | 16.29 | 0.921 | 0.910 | 1.16 | |
| V5 | 50 | 4.95 | 0.286 | 0.310 | 7.59 | Four voids at intervals of 0.3 m |
| 14.12 | 1.011 | 0.985 | 2.64 | |||
| 22.50 | 1.691 | 1.660 | 1.89 | |||
| 26.92 | 2.150 | 2.335 | 7.90 | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, J.-D.; Lee, J.-S. Smart Sensing Using Electromagnetic Waves for Inspection of Defects in Rock Bolts. Sensors 2020, 20, 2821. https://doi.org/10.3390/s20102821
Yu J-D, Lee J-S. Smart Sensing Using Electromagnetic Waves for Inspection of Defects in Rock Bolts. Sensors. 2020; 20(10):2821. https://doi.org/10.3390/s20102821
Chicago/Turabian StyleYu, Jung-Doung, and Jong-Sub Lee. 2020. "Smart Sensing Using Electromagnetic Waves for Inspection of Defects in Rock Bolts" Sensors 20, no. 10: 2821. https://doi.org/10.3390/s20102821
APA StyleYu, J.-D., & Lee, J.-S. (2020). Smart Sensing Using Electromagnetic Waves for Inspection of Defects in Rock Bolts. Sensors, 20(10), 2821. https://doi.org/10.3390/s20102821