Routing Schemes in FANETs: A Survey



Abstract
1. Introduction
- Movement in the three-dimensional space (against movement that is confined to roads and highways in VANETs [6]).
- Low node density (against high node density in urban areas in VANETs). In addition, the flying nodes, which are generally equipped with batteries that provide limited energy, have high energy consumption [10].
1.1. Our Contribution
- Motivation for the need of FANETs and an explanation of their unique characteristics;
- Comparison with other ad hoc networks, such as MANETs and VANETs;
- Requirements, such as the bandwidth and energy requirements of the flying nodes;
- Mobility models of the flying nodes, such as random waypoint and Manhattan;
- Taxonomy that covers various FANET attributes;
- Objectives, such as achieving the awareness of energy consumption and cost;
- Challenges, such as high energy consumption and number of retransmissions;
- Routing metrics, such as the residual energy level and the distance between flying nodes;
- Characteristics, such as the transmission range of flying nodes and the number of nodes in a network;
- Performance measures, such as the number of clusters in a network and cost;
- Open issues, such as enhancing QoS and addressing the dynamicity of network topology.
1.2. Significance of Our Work
1.3. Organization of This Paper
- Section 2 presents background and the motivation for the need to investigate routing schemes in FANETs.
- Section 3 presents the taxonomy and framework of routing schemes in FANETs.
- Section 4 presents the framework of routing schemes in FANETs.
- Section 5 presents a discussion of various routing schemes in FANETs based on the taxonomy.
- Section 6 presents open issues.
- Section 7 concludes the paper.
2. Background and Motivating the Need for FANETs
2.1. How Do FANETs Differ from Other Kinds of Ad Hoc Networks?
2.1.1. How Do FANETs Differ from MANETs and VANETs in Terms of the Types of Links?
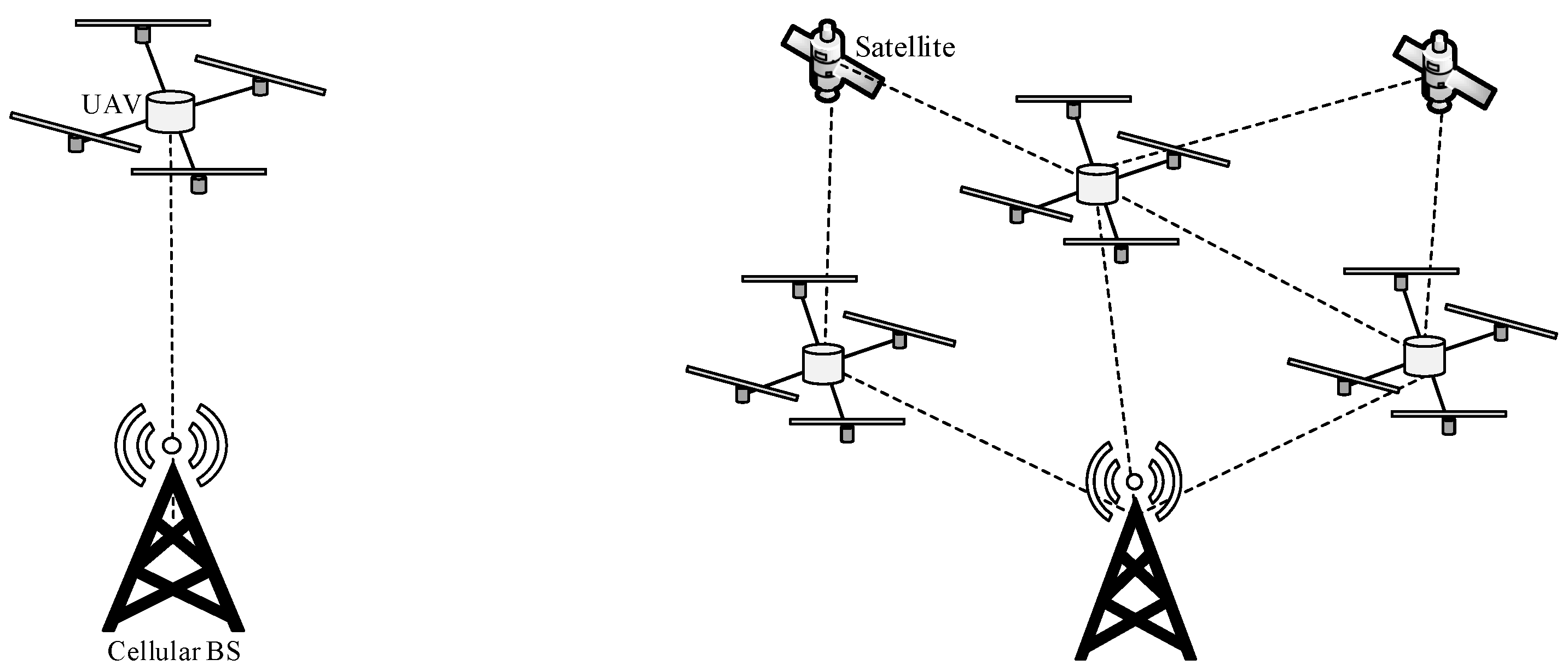
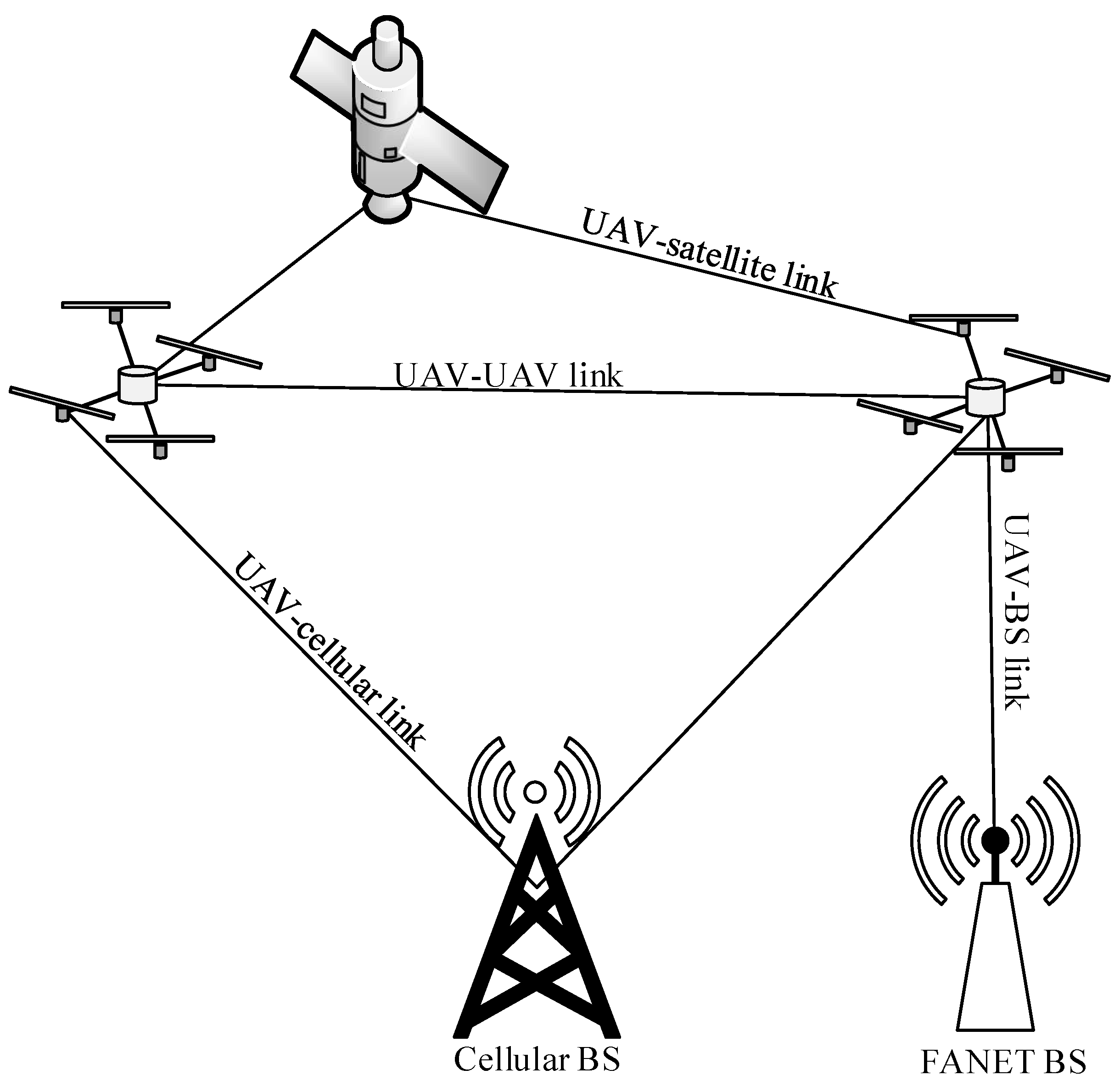
- a UAV–UAV link between a UAV and another UAV that supports ad hoc communication. This link is part of a route so that intermediate UAVs can forward packets towards a radio access infrastructure.
- a UAV–BS link (or a direct link) between a UAV and a FANET BS.
- a UAV–cellular link between a UAV and a cellular BS.
- a UAV–satellite link, which is a long-range terrestrial link, between a UAV and a satellite. The UAVs can form a star topology with the satellite. This link is necessary in the absence of other radio access infrastructure (i.e., FANET BS and cellular BS).
2.1.2. How Do FANETs Differ from MANETs and VANETs in Terms of Characteristics?
- Mobility degree (or the dynamicity of network topology) of FANETs is high (i.e., 30–460 km/h [20]) compared to MANETs (i.e., 5–50 km/h [50]) and VANETs (i.e., 10–120 km/h [8,9]). Hence, in FANET, the highly dynamic network topology causes frequent link disconnections and network partitions, resulting in low link quality [51,52].
- Mobility models of FANETs is different in terms of the capabilities of devices (e.g., UAVs move in the three-dimensional space, while nodes and vehicles in MANETs and VANETs move in a two-dimensional space) and the operating environment (e.g., FANETs operate in the sky, while MANETs operate in the terrain most of the time using random waypoint as it also considered harmful [53] but other model in random trip model [54] and VANETs operate in the highways using prediction based model). Examples of mobility models for FANETs are semi-random circular movement (SRCM) model [55,56], realistic model, and random waypoint model [57]. More details about the mobility models are presented in Section 2.4.
- Energy constraint in FANETs is moderate [7] compared to MANETs (i.e., has the highest energy constraint) and VANETs (i.e., has the lowest energy constraint). The availability of energy affects route lifetime, and so, small UAVs must conserve energy to support long flight time. In VANETs, vehicles are generally powered by vehicular battery with less energy constraint.
- Availability of line of sight (LOS) between UAVs is commonplace in FANETs contributing to higher robustness of a link, while there may be non-LOS (NLOS) in MANETs and VANETs as a result of obstacles in a link.
- Localization method in FANETs, such as inertia measurement unit, provides accurate coordinates of a UAV and neighboring UAVs in a real-time manner [58]. In contrast, MANETs use GPS to find the coordinates of nodes with an accuracy of 10–15 m [59], while VANETs use assisted-GPS or differential-GPS with an accuracy of 10 cm to reduce collisions and find routes [60].
- Node density (or the number of nodes in a unit area) of FANETs is low compared to MANETs and VANETs. This means that UAVs are spaced far apart in the sky and that the distance between the UAVs is comparatively long. Lower node density can increase the effects of the dynamicity of network topology. Nevertheless, node density can be high for multi-UAV swarm whereby a large swarm of UAVs is deployed.
2.2. What Are the Roles of FANETs?
2.3. What Are the Requirements of Routing in FANETs?
- High adaptability since UAVs must adapt to the highly dynamic network topology with low node density and cater to link disconnections and network partitions [7]. Hence, route discovery (i.e., establishing routes for data dissemination) and maintenance (i.e., reestablishing routes) must be sufficiently adaptive to improve route reliability (or robustness) in FANETs. This means that the routing table, which maintains the routes and their route costs, must be constantly updated and that reliable routes must be identified.
- High scalability since UAVs must cater to large-scale applications that require multiple UAVs [82] with high or low node density. Hence, route discovery and maintenance must be supported by collaboration and coordination among UAVs to improve network scalability.
- High residual energy since UAVs, which are powered by battery, must establish routes with sufficiently high residual energy to reduce link disconnections and network partitions as a result of node failures [83] in order to prolong route lifetime.
- High bandwidth since UAVs must gather data or sensing outcomes from a single or multiple locations and send them to radio access infrastructure for processing and decision making. Hence, route discovery and maintenance must establish routes with high (or sufficiently high) bandwidth.
2.4. What Are the Mobility Models in FANETs?
2.4.1. Pure Randomized Mobility Models
- A.1
- Random walk, which is based on the Brownian movement, allows a node to move in any directions
- A.2
- Random waypoint [87,88] allows a node to move in different directions (i.e., either straight, left, or right, rather than backward) towards a destination [89,90]. When the node arrives at its destination inside a fixed space, it stops for a short period of time, which helps to prevent a drastic change in order to provide smooth movement, and then, it starts to move towards another randomly chosen destination.
- A.3
- Random direction (or random mobility) shares the similar way in which the direction of a node’s movement is determined with random waypoint (A.2). The main difference is that a node must stop at the edge of a fixed space [91]. This means that a destination must be located at the edge of a fixed space rather than inside the space.
- A.4
- Manhattan grid allows a node to move in straight x-axis and y-axis directions in a grid road layout in urban areas. Specifically, the node moves in different directions (i.e., either straight, left, or right, rather than backward) to proceed or to turn to the left or right road at an intersection [92].
2.4.2. Path-Planned Mobility Models
- A.5
- Semi-random circular movement (SRCM) allows a node to form a circular (or curve) route [55]. When the node arrives at its destination following the route, it stops for a short period of time, and then, it starts to move towards another randomly chosen destination using a newly predefined route. The circular routes have been shown to reduce collisions between UAVs. This model is suitable for multi-UAV scenario.
2.4.3. Time-Dependent Mobility Models
- A.6
- Smooth turn (or realistic model) allows a node to choose a point and to form a circle around it, and then, it moves along the circle [55]. When the node moves towards another randomly chosen destination, it chooses a new point and moves along another circle around the newly chosen point. Nevertheless, there is lack of collision avoidance [94], which explain the need for better collaboration among nodes. This model is suitable for multi-UAV scenario.
2.5. What Are the Roles of Artificial Intelligence in FANETs?
3. Taxonomy
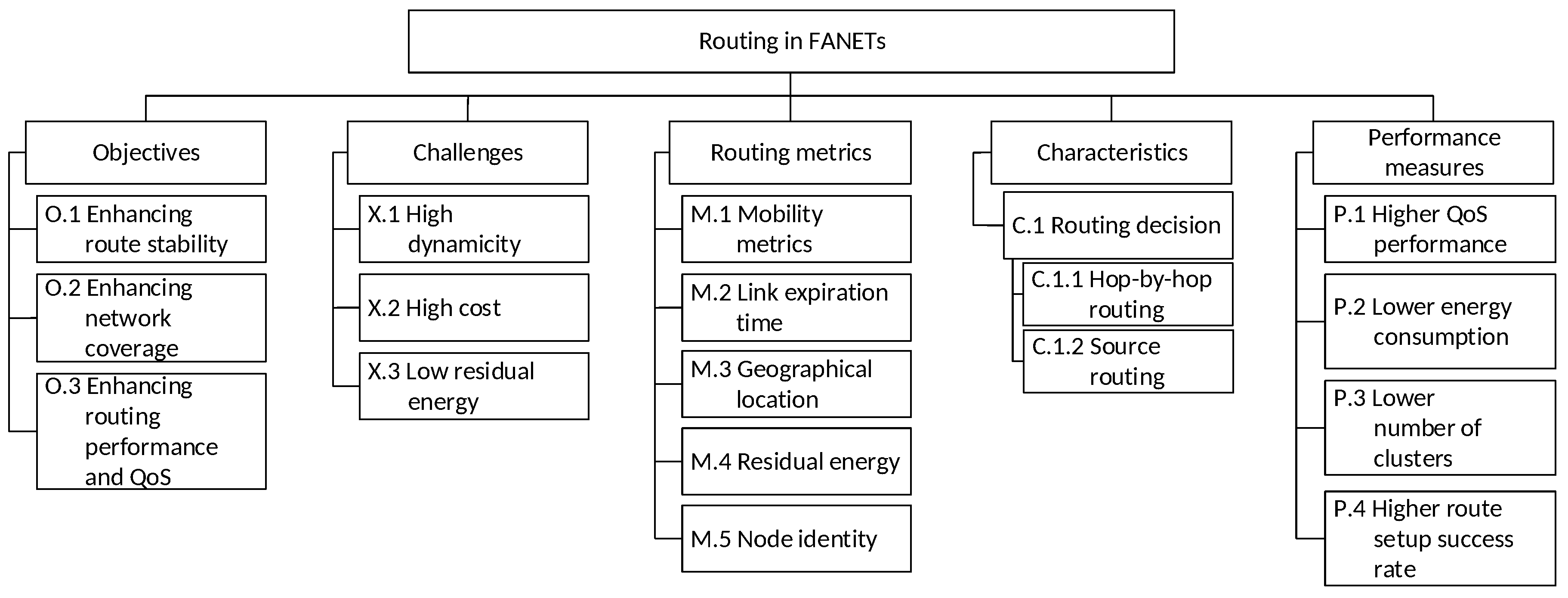
3.1. Objectives
- O.1
- Enhancing route stability. In FANETs, route stability and route lifetime are lower because a) the network topology is highly dynamic due to high mobility degree and b) the distance between nodes in FANETs is comparatively long. Hence, frequent route discovery and maintenance are needed to reestablish routes. In addition, route stability increases with node density and residual energy.
- O.2
- Enhancing network coverage. In FANETs, node density is lower, so a large transmission range and network coverage is needed to reduce the effects of link disconnections and network partitions in order to improve network connectivity. In addition, network coverage increases with node density in multi-UAV scenario.
- O.3
- Enhancing routing performance and QoS. Since route stability is lower in FANETs, the routing performance reduces due to increased route discovery and maintenance. Hence, suitable routes (e.g., routes that provide high route stability and route lifetime, and routes with lesser number of hops that reduce the latency of data dissemination in an ad hoc manner) are identified and selected. In addition, QoS increases with node density and transmission range, which increases network connectivity.
- higher QoS (e.g., higher throughput, as well as lower latency and packet loss);
- lower routing cost;
- longer route lifetime;
- lower latency of data dissemination in an ad hoc manner.
3.2. Challenges
- X.1
- High dynamicity. In FANETs, the highly dynamic network topology, as a result of high mobility, causes low link quality. Consequently, there are frequent link disconnections and network partitions, which increase route discovery and maintenance, resulting in lower routing performance. Various mobility models (see Section 2.4) of UAVs has been designed to investigate routing [104].
- X.2
- High cost. In FANETs, frequent route updates, route discovery (or to reestablish routes), route maintenance (as well as packet retransmission) due to route failure, can incur three main types of costs: (a) routing overhead (or inefficient resource utilization); (b) energy consumption; and (c) computational cost due to the time incurred for route discovery and maintenance. Multi-UAVs can be deployed to increase connectivity among UAV [7].
- X.3
- Low residual energy. In FANETs, UAVs, which are powered by battery, have limited energy (a) to perform routing (i.e., route updates, discovery, and maintenance); (b) to retransmit packets due to route failure; and (c) to support long transmission range due to the comparatively long distance between UAVs. Meanwhile, UAVs with higher payloads increase energy consumption [7].
3.3. Routing Metrics
- M.1
- Mobility metrics, such as speed, distance, and angle of arrival. This metric helps to achieve two main objectives in FANETs, namely enhancing route stability (O.1) and enhancing routing performance and QoS (O.3) because nodes with similar speed or angle of arrival are selected as part of a route to prolong the route lifetime.
- M.2
- Link expiration time, which depends on the distance between two UAVs. Longer link expiration time increases the link lifetime and, hence, the route lifetime. This metric helps to achieve two main objectives in FANETs, namely enhancing route stability (O.1) and enhancing routing performance and QoS (O.3) because (a) nodes with a higher number of neighbor nodes, which tend to have higher link expiration time, are selected as part of a route to increase route stability and (b) a new route can be reestablished before a link expires based on the link expiration time to ensure smooth network operation.
- M.3
- Geographical location can be obtained from GPS. In general, nodes are spaced far apart, and so, physically closer neighbor nodes are selected as part of a route; however, this may increase the number of hops of a route. This metric helps to achieve two main objectives in FANETs, namely enhancing route stability (O.1) and enhancing routing performance and QoS (O.3) because physically closer neighbor nodes can increase route lifetime and reduce route updates, discovery, and maintenance.
- M.4
- Residual energy can be used to reduce routing overhead incurred in route discovery and maintenance caused by link disconnections and network partitions, contributing to lower energy consumption. This metric helps to achieve three main objectives, namely enhancing route stability (O.1), enhancing network coverage (O.2), and enhancing routing performance and QoS (O.3) (e.g., higher throughput with reduced route discovery and maintenance) because neighbor nodes with higher residual energy are selected as part of a route to improve network connectivity among UAVs.
- M.5
- Node identity, such as node ID, can be used to select intermediate nodes, which receives packets and forwards them towards the destination, as part of a route in a random manner. This metric can be used along with the aforementioned routing metrics to achieve routing objectives.
3.4. Characteristics
- C.1
- Routing decision can be made at either the source node or the intermediate node. There are two options as follows:
- C.1.1
- Hop-by-hop routing includes the next-hop node and destination node information (i.e., node addresses) in the route request (RREQ) message. Hence, routing tables must be maintained at intermediate nodes to store the information [105].
- C.1.2
- Source routing includes the complete route information (i.e., the node addresses of all nodes of a route) in the RREQ message. Hence, routing table is not embedded in intermediate nodes, and these nodes can forward packets to destination nodes using the complete route information in RREQ.
3.5. Performance Measures
- P.1
- Higher QoS performance increases throughput and packet delivery rate (or reduces packet loss rate) as well as reduces end-to-end delay of delay-sensitive packets.
- P.2
- Lower energy consumption increases route lifetime.
- P.3
- Lower number of clusters increases the cluster size and, hence, the coverage of each cluster, which is a logical group of nodes comprised of the leader of a cluster (or cluster head, CH) and cluster members (CMs). Larger cluster size reduces intra-cluster communication (i.e., between CH and CMs from the same cluster) and inter-cluster communication (i.e., between CH and CMs from different clusters) [106,107].
- P.4
- Higher route setup success rate increases with the capability of setting up a route between a source node and a destination node.
4. Routing Framework
- F.1
- Adaptive: The adaptive routing scheme learns, selects, and changes routes dynamically based on the current network condition (e.g., network congestion level and network connectivity) and the updates of the routes. This enables nodes to select the optimal routes based on knowledge as time goes by.The advantage is that packets can be sent along optimal routes, contributing to reduced link disconnections and network congestion and, hence, improved network performance. Nevertheless, there is a shortcoming whereby computational complexity increases due to learning.
- F.2
- Proactive: The proactive (or active) routing scheme determines routes prior to packet arrivals to provide immediate data transmission; in other words, routes leading to all destination nodes in the network are established, stored, and maintained in routing tables in advance at UAVs. Since a route leading to a destination node is either readily available or unavailable at a source node, packets can be either sent or dropped immediately.The advantage is that packets can be sent immediately without any initial delay incurred to establish routes. Nevertheless, there are two shortcomings. Firstly, nodes must exchange a large number of messages (or routing overheads) among themselves periodically to establish, update, and maintain routes in the routing table due to the high dynamicity of network topology in which link disconnections and network partitions are commonplace. Consequently, routing overhead is high and bandwidth utilization is inefficient. Secondly, routes in the routing table may not be responsive to the dynamicity of network topology, and so, packets are sent along nonoptimal routes.
- F.3
- Reactive: The reactive routing scheme determines routes upon packet arrivals in an on-demand manner; in other words, routes are established whenever data transmission is needed.The advantage is that it addresses the high routing overhead issue found in proactive routing. Specifically, it reduces the periodic exchange of routing messages among nodes and the computational cost incurred to maintain and reestablish routes periodically, contributing to higher efficiency of bandwidth utilization. Nevertheless, there is a shortcoming that the initial delay incurred to establish routes increases.
- F.4
- Hybrid: The hybrid routing scheme integrates both proactive and reactive routing schemes. In Reference [117], nodes in the networks are segregated into clusters. The intra-cluster communication (i.e., between CH and CMs from the same cluster) is supported by reactive routing, and the inter-cluster communication (i.e., between CH and CMs from different clusters) is supported by proactive routing. Hybrid routing scheme has been proposed to cluster multi-UAV swarm and select optimal routes over a clustered network [118].The advantage is that it reduces routing overheads from source to destination nodes as intra-cluster communication can be excluded in route discovery.
5. Routing Schemes in FANETs
5.1. Adaptive
5.1.1. Enhancing Routing Performance Using Reinforcement Learning
- state represents the status of the node (i.e., whether ready-to-send, wait-to-send, or clear-to-send in a handshake);
- action represents whether to transmit data packets;
- reward represents positive reward (i.e., when packets arrive at the destination node) or negative reward (i.e., when packets fail to arrive at the destination node).
5.1.2. Enhancing Routing Performance Using Clustering
5.1.3. Enhancing Routing Performance Using Swarm-Based Clustering
5.2. Proactive
5.2.1. Enhancing Routing Performance Using Shortest Route
5.2.2. Enhancing Route Stability Based on Link Connectivity
5.2.3. Enhancing Routing Performance Using Probability of Link Disconnection
5.3. Reactive
5.3.1. Enhancing Routing Performance in Vehicular Networks Using UAV-Assisted Approach
5.3.2. Enhancing Route Stability Using Link Delay
- stores the affected packets;
- broadcasts RREQ to identify a next-hop node located closer to the destination node, which is based on the greedy geographic forwarding (GGF) [132];
- selects the next-hop node to form a new link in order to repair the broken route;
- forwards packets along the new link. Nevertheless, if steps broadcasting RREQ and selecting the next-hop node are unsuccessful, then the node drops the packets in its storage.
5.4. Hybrid
5.4.1. Enhancing Route Stability Using Energy-Efficient Technique
5.4.2. Enhancing Routing Performance Using the Node Density of UAVs
6. Open Issues
- high dynamicity (X.1), whereby nodes with high mobility can cause significant changes to network topology;
- high cost (X.2), whereby nodes with high mobility can cause link disconnections, resulting in high packet retransmission due to route failure, route discovery, and route maintenance;
- low residual energy (X.3), whereby higher number of message exchanges can cause high energy consumption and shorter route lifetime.
6.1. Minimizing the Effects of Frequent Link Disconnections to Improve Routing
6.2. Performing Routing in the Multi-UAV Swarm Scenarios
6.3. Performing Clustering for Supporting Routing in Multi-UAVs
6.4. Enhancing Mobility Models for the Investigation of Routing in FANETs
6.5. Improving Network Performance and Survivability through Multi-Pathing
6.6. Improving Network Performance by Using Artificial Intelligence
6.7. Improving Network Coverage by Using High and Low Altitude UAVs
6.8. Reducing Energy Consumption Using Green Energy
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AROD | Adaptive routing in dynamic ad hoc networks |
| BS | Base station |
| CH | Cluster head |
| CM | Cluster member |
| DOLSR | Directional optimized link state routing |
| FANET | Flying ad hoc network |
| GGF | Greedy geographic forwarding |
| GPS | Global positioning system |
| LOS | linear dichroism |
| MAC | Medium access control |
| MANET | Mobile ad hoc network |
| NLOS | Non line of sight |
| OLSR | Optimized link state routing |
| QoS | Quality of service |
| RLSRP | Reinforcement learning based self-learning routing protocol |
| RREP | Route reply |
| RREQ | Route request |
| SRCM | Semi-random circular movement |
| UAV | Unmanned aerial vehicle |
| UVAR | UAV-assisted VANET routing protocol |
| V2R | Vehicle to road side unit |
| V2V | Vehicle to vehicle |
| VANET | Vehicular ad hoc network |
References
- Zhang, C.; Zhang, W.; Wang, W.; Yang, L.; Zhang, W. Research challenges and opportunities of UAV millimeter-wave communications. IEEE Wirel. Commun. 2019, 26, 58–62. [Google Scholar] [CrossRef]
- Bürkle, A.; Segor, F.; Kollmann, M. Towards autonomous micro UAV swarms. J. Intell. Robot. Syst. 2011, 61, 339–353. [Google Scholar] [CrossRef]
- Ben-Asher, Y.; Feldman, S.; Gurfil, P.; Feldman, M. Distributed decision and control for cooperative UAVs using ad hoc communication. IEEE Trans. Control Syst. Technol. 2008, 16, 511–516. [Google Scholar] [CrossRef]
- Mauve, M.; Widmer, J.; Hartenstein, H. A survey on position-based routing in mobile ad hoc networks. IEEE Netw. 2001, 15, 30–39. [Google Scholar] [CrossRef]
- Zeadally, S.; Hunt, R.; Chen, Y.-S.; Irwin, A.; Hassan, A. Vehicular ad hoc networks (VANETs): Status, results, and challenges. Telecommun. Syst. 2012, 50, 217–241. [Google Scholar] [CrossRef]
- Li, F.; Wang, Y. Routing in vehicular ad hoc networks: A survey. IEEE Veh. Technol. Mag. 2007, 2, 12–22. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, A. Flying ad hoc networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Souza, E.; Nikolaidis, I.; Gburzynski, P. A new aggregate local mobility clustering algorithm for VANETs. In Proceedings of the IEEE International Conference on Communications, Cape Town, South Africa, 23–27 May 2010; pp. 1–5. [Google Scholar]
- Lee, E.-K.; Oh, S.Y.; Gerla, M. Rfid assisted vehicle positioning in VANETs. Pervasive Mob. Comput. 2012, 8, 167–179. [Google Scholar] [CrossRef]
- Song, Q.; Jin, S.; Zheng, F.-C. Completion time and energy consumption minimization for UAV-enabled multicasting. IEEE Wirel. Commun. Lett. 2019, 8, 821–824. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Morse, B.S.; Engh, C.H.; Goodrich, M.A. UAV video coverage quality maps and prioritized indexing for wilderness search and rescue. In Proceedings of the 5th ACM/IEEE International Conference on Human-Robot Interaction, Osaka, Japan, 2–5 March 2010; pp. 227–234. [Google Scholar]
- Olsson, P.-M.; Kvarnström, J.; Doherty, P.; Burdakov, O.; Holmberg, K. Generating UAV communication networks for monitoring and surveillance. In Proceedings of the 11th IEEE International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 7–10 December 2010; pp. 1070–1077. [Google Scholar]
- Samad, T.; Bay, J.S.; Godbole, D. Network-centric systems for military operations in urban terrain: The role of UAVs. Proc. IEEE 2007, 95, 92–107. [Google Scholar] [CrossRef]
- Chao, H.; Cao, Y.; Chen, Y. Autopilots for small fixed-wing unmanned air vehicles: A survey. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 5–8 August 2007; pp. 3144–3149. [Google Scholar]
- Chaumette, S.; Laplace, R.; Mazel, C.; Mirault, R.; Dunand, A.; Lecoutre, Y.; Perbet, J.N. Carus, an operational retasking application for a swarm of autonomous UAVs: First return on experience. In Proceedings of the IEEE Military Communications Conference—Milcom, Baltimore, MD, USA, 7–10 November 2011; pp. 2003–2010. [Google Scholar]
- Quaritsch, M.; Kruggl, K.; Wischounig-Strucl, D.; Bhattacharya, S.; Shah, M.; Rinner, B. Networked UAVs as aerial sensor network for disaster management applications. e i Elektrotechnik und Informationstechnik 2010, 127, 56–63. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Networking models in flying ad hoc networks (FANETs): Concepts and challenges. J. Intell. Robot. Syst. 2014, 74, 513–527. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Gupta, S.K. Collaboration of drone and internet of public safety things in smart cities: An overview of qos and network performance optimization. Drones 2019, 3, 13. [Google Scholar] [CrossRef]
- Sahingoz, O.K. Mobile networking with UAVs: Opportunities and challenges. In Proceedings of the IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 9–12 June 2013; pp. 933–941. [Google Scholar]
- Alshbatat, A.I.; Alsafasfeh, Q. Cooperative decision making using a collection of autonomous quad rotor unmanned aerial vehicle interconnected by a wireless communication network. Glob. J. Technol. 2012, 1, 212–218. [Google Scholar]
- Arafat, M.Y.; Moh, S. Location-aided delay tolerant routing protocol in UAV networks for post-disaster operation. IEEE Access 2018, 6, 59891–59906. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-to-X communications: Design and optimization for multi-UAV networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar] [CrossRef]
- Mekikis, P.V.; Antonopoulos, A.; Kartsakli, E.; Alonso, L.; Verikoukis, C. Communication recovery with emergency aerial networks. IEEE Trans. Consum. Electron. 2017, 63, 291–299. [Google Scholar] [CrossRef]
- Prodromos-Vasileios, M.; Antonopoulos, A. Breaking the Boundaries of Aerial Networks with Charging Stations. In Proceedings of the IEEE International Conference on Communications (ICC), Atlanta, GA, USA, 20–24 May 2019. [Google Scholar]
- Mahmud, I.; Cho, Y.Z. Adaptive Hello Interval in FANET Routing Protocols for Green UAVs. IEEE Access 2019, 7, 63004–63015. [Google Scholar] [CrossRef]
- Ye, J.; Zhang, C.; Lei, H.; Pan, G.; Ding, Z. Secure UAV-to-UAV systems with spatially random UAVs. IEEE Wirel. Commun. Lett. 2018, 8, 564–567. [Google Scholar] [CrossRef]
- Bauer, C.; Zitterbart, M. A survey of protocols to support ip mobility in aeronautical communications. IEEE Commun. Surv. Tutor. 2011, 13, 642–657. [Google Scholar] [CrossRef]
- Neji, N.; Lacerda, R.D.; Azoulay, A.; Letertre, T.; Outtier, O. Survey on the future aeronautical communication system and its development for continental communications. IEEE Trans. Veh. Technol. 2013, 62, 182–191. [Google Scholar] [CrossRef]
- Xie, J.; Wan, Y.; Kim, J.H.; Fu, S.; Namuduri, K. A survey and analysis of mobility models for airborne networks. IEEE Commun. Surv. Tutor. 2014, 16, 1221–1238. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Taleb, T.; Arouk, O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2016, 18, 1123–1152. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Bujari, A.; Calafate, C.T.; Cano, J.-C.; Manzoni, P.; Palazzi, C.E.; Ronzani, D. Flying ad hoc network application scenarios and mobility models. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717738192. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for flying ad hoc networks (FANETs). Veh. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Kaleem, Z.; Rehmani, M.H. Amateur drone monitoring: State-of-the-art architectures, key enabling technologies, and future research directions. IEEE Wirel. Commun. 2018, 25, 150–159. [Google Scholar] [CrossRef]
- Khan, M.; Khan, I.; Safi, A.; Quershi, I. Dynamic routing in flying ad hoc networks using topology-based routing protocols. Drones 2018, 2, 27. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M.-D. Flying ad hoc networks: A new domain for network communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed]
- Kaur, P.; Singh, A. Nature-inspired optimization techniques in VANETs and FANETs: A survey. In Advanced Computational and Communication Paradigms; Springer: Berlin, Germany, 2018; pp. 651–663. [Google Scholar]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Jiang, J.; Han, G. Routing protocols for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 58–63. [Google Scholar] [CrossRef]
- Prakash, S.; Saroj, V. A review of wireless charging nodes in wireless sensor networks. In Data Science and Big Data Analytics; Springer: Berlin, Germany, 2019; pp. 177–188. [Google Scholar]
- Rajaraman, R. Topology control and routing in ad hoc networks: A survey. ACM SIGACT News 2002, 33, 60–73. [Google Scholar] [CrossRef]
- Liu, G.; Yan, Z.; Pedrycz, W. Data collection for attack detection and security measurement in mobile ad hoc networks: A survey. J. Netw. Comput. Appl. 2018, 105, 105–122. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Ahmed, E.; Xia, F.; Karim, A.; Shiraz, M.; Noor, R.M. Adaptive beaconing approaches for vehicular ad hoc networks: A survey. IEEE Syst. J. 2018, 12, 1263–1277. [Google Scholar] [CrossRef]
- Hartenstein, H.; Laberteaux, P.L. A tutorial survey on vehicular ad hoc networks. IEEE Commun. Mag. 2008, 46, 164–171. [Google Scholar] [CrossRef]
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular ad hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392. [Google Scholar] [CrossRef]
- Frew, E.W.; Brown, T.X. Networking issues for small unmanned aircraft systems. J. Intell. Robot. Syst. 2009, 54, 21–37. [Google Scholar] [CrossRef]
- Frew, E.W. Airborne communication networks for small unmanned aircraft systems. Proc. IEEE 2008, 96, 2008–2027. [Google Scholar] [CrossRef]
- Liu, S.; Ölveczky, P.C.; Meseguer, J. A framework for mobile ad hoc networks in real-time maude. In International Workshop on Rewriting Logic and Its Applications; Springer: Berlin, Germany, 2014; pp. 162–177. [Google Scholar]
- Han, Z.; Swindlehurst, A.L.; Liu, K.J.R. Optimization of MANET connectivity via smart deployment/movement of unmanned air vehicles. IEEE Trans. Veh. Technol. 2009, 58, 3533. [Google Scholar] [CrossRef]
- Yanmaz, E.; Kuschnig, R.; Bettstetter, C. Channel measurements over 802.11 a-based UAV-to-ground links. In Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps), Houston, TX, USA, 5–9 December 2011; pp. 1280–1284. [Google Scholar]
- Yoon, J.; Liu, M.; Noble, B. Random waypoint considered harmful. In Proceedings of the IEEE INFOCOM Twenty-Second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No. 03CH37428), San Francisco, CA, USA, 30 March–3 April 2003; pp. 1312–1321. [Google Scholar]
- Le Boudec, J.Y.; Vojnovic, M. The random trip model: Stability, stationary regime, and perfect simulation. IEEE/ACM Trans. Netw. 2006, 14, 1153–1166. [Google Scholar] [CrossRef]
- Wang, W.; Guan, X.; Wang, B.; Wang, Y. A novel mobility model based on semi-random circular movement in mobile ad hoc networks. Inf. Sci. 2010, 180, 399–413. [Google Scholar] [CrossRef]
- Kuiper, E.; Nadjm-Tehrani, S. Mobility models for UAV group reconnaissance applications. In Proceedings of the IEEE International Conference on Wireless and Mobile Communications(ICWMC’06), Bucharest, Romania, 29–31 July 2006; p. 33. [Google Scholar]
- Brown, T.; Argrow, B.; Dixon, C.; Doshi, S.; Thekkekunnel, R.-G.; Henkel, D. Ad hoc UAV ground Network (Augnet). In Proceedings of the AIAA 3rd Unmanned Unlimited Technical Conference, Workshop and Exhibit, Chicago, IL, USA, 20–23 September 2004; p. 6321. [Google Scholar]
- Wang, J.; Ghosh, R.K.; Das, S.K. A survey on sensor localization. J. Control Theory Appl. 2010, 8, 2–11. [Google Scholar] [CrossRef]
- Ahn, H.-S.; Won, C.-H. Dgps/imu integration-based geolocation system: Airborne experimental test results. Aerosp. Sci. Technol. 2009, 13, 316–324. [Google Scholar] [CrossRef]
- Wong, A.K.; Woo, T.K.; Lee, A.T.; Xiao, X.; Luk, V.W.; Cheng, K.W. An agps-based elderly tracking system. In Proceedings of the IEEE First International Conference on Ubiquitous and Future Networks (ICUFN), Hong Kong, China, 7–9 June 2009; pp. 100–105. [Google Scholar]
- Singh, K.; Verma, A.K. Flying adhoc networks concept and challenges. In Advanced Methodologies and Technologies in Network Architecture, Mobile Computing, and Data Analytics; IGI Global: Philadelphia, PA, USA, 2019; pp. 903–911. [Google Scholar]
- Padró, J.-C.; Muñoz, F.-J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Vijayanandh, R.; Kumar, J.D.; Kumar, M.S.; Bharathy, L.A.; Kumar, G.R. Design and fabrication of solar powered unmanned aerial vehicle for border surveillance. In Proceedings of the International Conference on Remote Sensing for Disaster Management; Springer: Berlin, Germany, 2019; pp. 61–71. [Google Scholar]
- Odonkor, P.; Ball, Z.; Chowdhury, S. Distributed operation of collaborating unmanned aerial vehicles for time-sensitive oil spill mapping. Swarm Evol. Comput. 2019, 46, 52–68. [Google Scholar] [CrossRef]
- Kang, J.-G.; Lim, D.-W.; Jung, J.-W. Energy-efficient forest fire prediction model based on two-stage adaptive duty-cycled hybrid x-mac protocol. Sensors 2018, 18, 2960. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; You, I. Sustainable and secure trajectories for the military internet of drones (IoD) through an efficient medium access control (mac) protocol. Comput. Electr. Eng. 2019, 74, 59–73. [Google Scholar] [CrossRef]
- George, J.; Sujit, P.B.; Sousa, J.B. Search strategies for multiple UAV search and destroy missions. J. Intell. Robot. 2011, 61, 355–367. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, P.; Vuran, M.C.; Al-Rodhaan, M.A.; Al-Dhelaan, A.M.; Akyildiz, I.F. Bordersense: Border patrol through advanced wireless sensor networks. Ad Hoc Netw. 2011, 9, 468–477. [Google Scholar] [CrossRef]
- Barrado, C.; Messeguer, R.; López, J.; Pastor, E.; Santamaria, E.; Royo, P. Wildfire monitoring using a mixed air-ground mobile network. IEEE Pervasive Comput. 2010, 9, 24–32. [Google Scholar] [CrossRef]
- Krishna, K.R. Unmanned Aerial Vehicle Systems in Crop Production: A Compendium; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Zhelonkin, A. Automated field monitoring by a group of light aircraft-type UAVs. In Proceedings of the Third International Scientific Conference “Intelligent Information Technologies for Industry”(IITI’18); Springer: Berlin, Germany, 2019. [Google Scholar]
- Maza, I.; Caballero, F.; Capitán, J.; Dios, J.R.M.; Ollero, A. Experimental results in multi-UAV coordination for disaster management and civil security applications. J. Intell. Robot. Syst. 2011, 61, 563–585. [Google Scholar] [CrossRef]
- Freitas, E.P.D.; Heimfarth, T.; Netto, I.F.; Lino, C.E.; Pereira, C.E.; Ferreira, A.M.; Wagner, F.R.; Larsson, T. UAV relay network to support wsn connectivity. In Proceedings of the IEEE International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Moscow, Russia, 17–21 September 2010; pp. 309–314. [Google Scholar]
- Jiang, F.; Swindlehurst, A.L. Dynamic UAV relay positioning for the ground-to-air uplink. In Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps), Miami, FL, USA, 6–10 December 2010; pp. 1766–1770. [Google Scholar]
- Cho, A.; Kim, J.; Lee, S.; Kee, C. Wind estimation and airspeed calibration using a UAV with a single-antenna gps receiver and pitot tube. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 109–117. [Google Scholar] [CrossRef]
- Xiang, H.; Tian, L. Development of a low-cost agricultural remote sensing system based on an autonomous unmanned aerial vehicle (UAV). Biosyst. Eng. 2011, 108, 174–190. [Google Scholar] [CrossRef]
- Wei, P.; Gu, Q.; Sun, D. Wireless sensor network data collection by connected cooperative UAVs. In Proceedings of the IEEE American Control Conference (ACC), Washington, DC, USA, 17–19 June 2013; pp. 5911–5916. [Google Scholar]
- Alvear, O.; Calafate, C.T.; Hernández, E.; Cano, J.-C.; Manzoni, P. Mobile pollution data sensing using UAVs. In Proceedings of the ACM 13th International Conference on Advances in Mobile Computing and Multimedia, Brussels, Belgium, 11–13 December 2015; pp. 393–397. [Google Scholar]
- Semsch, E.; Jakob, M.; Pavlicek, D.; Pechoucek, M. Autonomous UAV surveillance in complex urban environments. In Proceedings of the IEEE Computer Society, IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology-Volume 02, Washington, DC, USA, 15–18 September 2009; pp. 82–85. [Google Scholar]
- Karaduman, M.; Çınar, A.; Eren, H. UAV traffic patrolling via road detection and tracking in anonymous aerial video frames. J. Intell. Robot. Syst. 2019, 995, 675–690. [Google Scholar] [CrossRef]
- Sánchez-García, J.; García-Campos, J.M.; Arzamendia, M.; Reina, D.G.; Toral, S.L.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]
- Yanmaz, E.; Costanzo, C.; Bettstetter, C.; Elmenreich, W. A discrete stochastic process for coverage analysis of autonomous UAV networks. In Proceedings of the IEEE GLOBECOM Workshops (GC Wkshps), Miami, FL, USA, 6–10 December 2010; pp. 1777–1782. [Google Scholar]
- Shen, J.; Moh, S.; Chung, I. Routing protocols in delay tolerant networks: A comparative survey. In Proceedings of the 23rd International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), Shimonoseki City, Japan, 6–9 July 2008; pp. 6–9. [Google Scholar]
- Baillieul, J.; Antsaklis, P.J. Control and communication challenges in networked real-time systems. Proc. IEEE 2007, 95, 9–28. [Google Scholar] [CrossRef]
- Zhai, H.; Kwon, Y.; Fang, Y. Performance analysis of ieee 802.11 mac protocols in wireless lans. Wirel. Commun. Mob. Comput. 2004, 4, 917–931. [Google Scholar] [CrossRef]
- Dewangan, K.P.; Bonde, P. Application of rpgm model in wireless ad hoc network. In Proceedings of the 3rd International Conference on Internet of Things and Connected Technologies (ICIoTCT), Jaipur, India, 26–27 March 2018. [Google Scholar]
- Camp, T.; Boleng, J.; Davies, V. A survey of mobility models for ad hoc network research. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Broch, J.; Maltz, D.A.; Johnson, D.B.; Hu, Y.-C.; Jetcheva, J. A performance comparison of multi-hop wireless ad hoc network routing protocols. In Proceedings of the 4th Annual ACM/IEEE International Conference on Mobile Computing and Networking, Dallas, TX, USA, 25–30 October 1998; pp. 85–97. [Google Scholar]
- Khan, S.; Kim, K.-I. Simulation-based performance comparison of two routing protocols for aircraft ad hoc networks. Int. J. Ad Hoc Ubiquitous Comput. 2016, 22, 128–137. [Google Scholar] [CrossRef]
- Bekmezci, I.; Ermis, M.; Kaplan, S. Connected multi UAV task planning for flying ad hoc networks. In Proceedings of the IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Odessa, Ukraine, 27–30 May 2014; pp. 28–32. [Google Scholar]
- Xie, J.; Wan, Y.; Wang, B.; Fu, S.; Lu, K.; Kim, J.H. A comprehensive 3-dimensional random mobility modeling framework for airborne networks. IEEE Access 2018, 6, 22849–22862. [Google Scholar] [CrossRef]
- Singh, K.; Verma, A.K. Adaptability of various mobility models for flying adhoc networks—A review. In Networking Communication and Data Knowledge Engineering; Springer: Berlin, Germany, 2018; pp. 51–63. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Franco, C.D.; Ferreira, P.R.; Buttazzo, G.C. Energy-aware spiral coverage path planning for UAV photogrammetric applications. IEEE Robot. Autom. Lett. 2018, 3, 3662–3668. [Google Scholar] [CrossRef]
- Vanitha, N.; Ganapathi, P. Traffic Analysis of UAV Networks Using Enhanced Deep Feed Forward Neural Networks (EDFFNN). In Handbook of Research on Machine and Deep Learning Applications for Cyber Security; IGI Global: Philadelphia, PA, USA, 2020; pp. 219–244. [Google Scholar]
- Khan, A.; Aftab, F.; Zhang, Z. Self-organization based clustering scheme for FANETs using Glowworm Swarm Optimization. Phys. Commun. 2019, 36, 100769. [Google Scholar] [CrossRef]
- De Rango, F.; Potrino, G.; Tropea, M.; Santamaria, A.F.; Fazio, P. Scalable and ligthway bio-inspired coordination protocol for FANET in precision agriculture applications. Comput. Electr. Eng. 2019, 74, 305–318. [Google Scholar] [CrossRef]
- Na, H.J.; Yoo, S.J. PSO-Based Dynamic UAV Positioning Algorithm for Sensing Information Acquisition in Wireless Sensor Networks. IEEE Access 2019, 7, 77499–77513. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Singh, K.; Atri, M. Localization and energy-efficient data routing for unmanned aerial vehicles: Fuzzy-logic-based approach. IEEE Commun. Mag. 2018, 56, 129–133. [Google Scholar] [CrossRef]
- Zheng, Z.; Sangaiah, A.K.; Wang, T. Adaptive communication protocols in flying ad hoc network. IEEE Commun. Mag. 2018, 56, 136–142. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Lagraa, N.; Yagoubi, M.B. Intelligent UAV-assisted routing protocol for urban VANETs. Comput. Commun. 2017, 107, 93–111. [Google Scholar] [CrossRef]
- Aadil, F.; Raza, A.; Khan, M.F.; Maqsood, M.; Mehmood, I.; Rho, S. Energy aware cluster-based routing in flying ad hoc networks. Sensors 2018, 18, 1413. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Ru, L.; Fang, K. Bio-inspired mobility prediction clustering algorithm for ad hoc UAV networks. Eng. Lett. 2016, 24, 83–92. [Google Scholar]
- Oubbati, O.S.; Chaib, N.; Lakas, A.; Lorenz, P.; Rachedi, A. UAV-assisted supporting services connectivity in urban VANETs. IEEE Trans. Veh. Technol. 2019, 68, 3944–3951. [Google Scholar] [CrossRef]
- Ruiz, P.M.; Stojmenovic, I. Cost-efficient multicast routing in ad hoc and sensor networks. In Handbook on Approximation Algorithms and Metaheuristics; Gonzalez, T., Ed.; Chapman & Hall: Boca Raton, FL, USA, 2018. [Google Scholar]
- Khan, Z.; Fan, P. A multi-hop moving zone (mmz) clustering scheme based on cellular-V2X. China Commun. 2018, 15, 55–66. [Google Scholar] [CrossRef]
- Bassoy, S.; Jaber, M.; Imran, M.A.; Xiao, P. Load aware self-organising user-centric dynamic comp clustering for 5G networks. IEEE Access 2016, 4, 2895–2906. [Google Scholar] [CrossRef]
- Liu, C.; Wu, J. Adaptive routing in dynamic ad hoc networks. In Proceedings of the IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 31 March–3 April 2008; pp. 2603–2608. [Google Scholar]
- Ding, Y.; Xiao, L. Sadv: Static-node-assisted adaptive data dissemination in vehicular networks. IEEE Trans. Veh. Technol. 2010, 59, 2445–2455. [Google Scholar] [CrossRef]
- Clausen, T.; Jacquet, P.; Adjih, C.; Laouiti, A.; Minet, P.; Muhlethaler, P.; Qayyum, A.; Viennot, L. Optimized Link State Routing Protocol (OLSR). Available online: https://hal.inria.fr/inria-00471712/document (accessed on 1 October 2019).
- Perkins, C.E.; Bhagwat, P. Highly dynamic destination-sequenced distance-vector routing (dsdv) for mobile computers. In ACM SIGCOMM Computer Communication Review; ACM: New York, NY, USA, 1994; pp. 234–244. [Google Scholar]
- Alshabtat, A.I.; Dong, L.; Li, J.; Yang, F. Low latency routing algorithm for unmanned aerial vehicles ad hoc networks. Int. J. Electr. Comput. Eng. 2010, 6, 48–54. [Google Scholar]
- Nayyar, A. Flying adhoc network (FANETs): Simulation based performance comparison of routing protocols: Aodv, dsdv, dsr, olsr, aomdv and hwmp. In Proceedings of the IEEE International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Durban, South Africa, 6–7 August 2018; pp. 1–9. [Google Scholar]
- Kharb, S.; Singhrova, A. A survey on network formation and scheduling algorithms for time slotted channel hopping in industrial networks. J. Netw. Comput. Appl. 2018, 126, 59–87. [Google Scholar] [CrossRef]
- Anand, M.; Sasikala, T. Efficient energy optimization in mobile ad hoc network (MANET) using better-quality aodv protocol. In Cluster Computing; Springer: Berlin, Germany, 2018; pp. 1–7. [Google Scholar]
- Sufian, A.; Sultana, F.; Dutta, P. Data load balancing in mobile ad hoc network using fuzzy logic (DBMF). arXiv 2019, arXiv:1905.11627. [Google Scholar]
- Liu, K.; Zhang, J.; Zhang, T. The clustering algorithm of UAV networking in near-space. In Proceedings of the IEEE 8th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Kunming, China, 2–5 November 2008; pp. 1550–1553. [Google Scholar]
- Sharma, V.; Srinivasan, K.; Kumar, R.; Chao, H.-C.; Hua, K.-L. Efficient cooperative relaying in flying ad hoc networks using fuzzy-bee colony optimization. J. Supercomput. 2017, 73, 3229–3259. [Google Scholar] [CrossRef]
- Aadil, F.; Bajwa, K.B.; Khan, S.; Chaudary, N.M.; Akram, A. CACONET: Ant colony optimization (ACO) based clustering algorithm for VANET. PLoS ONE 2016, 11, e0154080. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.F.; Aadil, F.; Maqsood, M.; Khan, S.; Bukhari, B.H. An efficient optimization technique for node clustering in VANETs using gray wolf optimization. KSII Trans. Internet Inf. Syst. (TIIS) 2018, 12, 4228–4247. [Google Scholar]
- Fahad, M.; Aadil, F.; Khan, S.; Shah, P.A.; Muhammad, K.; Lloret, J.; Wang, H.; Lee, J.W.; Mehmood, I. Grey wolf optimization based clustering algorithm for vehicular ad hoc networks. Comput. Electr. Eng. 2018, 70, 853–870. [Google Scholar] [CrossRef]
- Shah, Y.A.; Habib, H.A.; Aadil, F.; Khan, M.F.; Maqsood, M.; Nawaz, T. CAMONET: Moth-flame optimization (MFO) based clustering algorithm for VANETs. IEEE Access 2018, 6, 48611–48624. [Google Scholar] [CrossRef]
- Cooper, C.; Franklin, D.; Ros, M.; Safaei, F.; Abolhasan, M. A comparative survey of VANET clustering techniques. IEEE Commun. Surv. Tutor. 2017, 19, 657–681. [Google Scholar] [CrossRef]
- Rosati, S.; Krużelecki, K.; Heitz, G.; Floreano, D.; Rimoldi, B. Dynamic routing for flying ad hoc networks. IEEE Trans. Veh. Technol. 2016, 65, 1690–1700. [Google Scholar] [CrossRef]
- Gankhuyag, G.; Shrestha, A.P.; Yoo, S.-J. Robust and reliable predictive routing strategy for flying ad hoc networks. IEEE Access 2017, 5, 643–654. [Google Scholar] [CrossRef]
- Biomo, J.D.; Kunz, T.; St-Hilaire, M. Routing in unmanned aerial ad hoc networks: Introducing a route reliability criterion. In Proceedings of the IEEE 7th IFIP Wireless and Mobile Networking Conference (WMNC), Vilamoura, Portugal, 20–22 May 2014; pp. 1–7. [Google Scholar]
- Kaleem, Z.; Rehmani, M.H.; Ahmed, E.; Jamalipour, A.; Rodrigues, J.J.P.C.; Moustafa, H.; Guibene, W. Amateur drone surveillance: Applications, architectures, enabling technologies, and public safety issues: Part 2. IEEE Commun. Mag. 2018, 56, 66–67. [Google Scholar] [CrossRef]
- Khan, A.; Aftab, F.; Zhang, Z. BICSF: Bio-inspired clustering scheme for FANETs. IEEE Access 2019, 7, 31446–31456. [Google Scholar] [CrossRef]
- Zonghua, M.; Xiaojing, M. A modified aodv routing protocol based on route stability in MANET. In Proceedings of the 4th IET International Conference on Wireless, Mobile & Multimedia Networks (ICWMMN), Beijing, China, 27–30 November 2011; pp. 63–67. [Google Scholar]
- Li, Y.; St-Hilaire, M.; Kunz, T. Enhancing the RGR Routing Protocol for Unmanned Aeronautical ad Hoc Networks; Technical Report SCE-12-01; Carleton University, Systems and Computer Engineering: Ottawa, ON, Canada, 2012. [Google Scholar]
- Li, Y. Enhancements to reduce the overhead of the reactive-greedy-reactive routing protocol for unmanned aeronautical ad hoc networks. In Proceedings of the IEEE 8th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM), Shanghai, China, 21–23 September 2012; pp. 1–4. [Google Scholar]
- Shirani, R.; St-Hilaire, M.; Kunz, T.; Zhou, Y.; Li, J.; Lamont, L. The performance of greedy geographic forwarding in unmanned aeronautical ad hoc networks. In Proceedings of the IEEE Ninth Annual Communication Networks and Services Research Conference (CNSR), Ottawa, ON, Canada, 2–5 May 2011; pp. 161–166. [Google Scholar]
- Guo, Q.; Yan, J.; Xu, W. Localized fault tolerant algorithm based on node movement freedom degree in flying ad hoc networks. Symmetry 2019, 11, 106. [Google Scholar] [CrossRef]
- Klaine, P.V.; Nadas, J.P.B.; Souza, R.D.; Imran, M.A. Distributed drone base station positioning for emergency cellular networks using reinforcement learning. Cogn. Comput. 2018, 10, 790–804. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Ren, Y.; Chen, K.-C.; Hanzo, L. Thirty years of machine learning: The road to pareto-optimal next-generation wireless networks. arXiv 2019, arXiv:1902.01946. [Google Scholar]
- Huang, X.-L.; Wang, G.; Hu, F.; Kumar, S. Stability-capacity-adaptive routing for high-mobility multihop cognitive radio networks. IEEE Trans. Veh. Technol. 2011, 60, 2714–2729. [Google Scholar] [CrossRef]
- Arul, S.H.; Sathyamoorthy, A.J.; Patel, S.; Otte, M.; Xu, H.; Lin, M.C.; Manocha, D. Lswarm: Efficient collision avoidance for large swarms with coverage constraints in complex urban scenes. arXiv 2019, arXiv:1902.08379. [Google Scholar] [CrossRef]
- Kurdi, H.A.; How, J.P. Dynamic Task Allocation in an Autonomous Multi-UAV Mission. U.S. Patent 15/344,014, 11 May 2017. [Google Scholar]
- Challita, U.; Ferdowsi, A.; Chen, M.; Saad, W. Machine learning for wireless connectivity and security of cellular-connected UAVs. IEEE Wirel. Commun. 2019, 26, 28–35. [Google Scholar] [CrossRef]
- Yang, J.; You, X.; Wu, G.; Hassan, M.M.; Almogren, A.; Guna, J. Application of reinforcement learning in UAV cluster task scheduling. Future Gener. Comput. Syst. 2019, 95, 140–148. [Google Scholar] [CrossRef]
- Wang, W.; Wang, J.; Wang, M.; Wang, B.; Zhang, W. A realistic mobility model with irregular obstacle constraints for mobile ad hoc networks. Wirel. Netw. 2019, 25, 487–506. [Google Scholar] [CrossRef]
- Sharma, V. Advances in drone communications, state-of-the-art and architectures. Drones 2019, 3, 21. [Google Scholar] [CrossRef]
- Palomar, D.P.; Chiang, M. Alternative distributed algorithms for network utility maximization: Framework and applications. IEEE Trans. Autom. Control 2007, 52, 2254–2269. [Google Scholar] [CrossRef]
- Xin, G.; Jun, Z.; Tao, Z. A distributed multipath routing algorithm to minimize congestion. In Proceedings of the IEEE/AIAA 28th Digital Avionics Systems Conference, Orlando, FL, USA, 23–29 October 2009. [Google Scholar]
- Tanaka, A. Effects of length and number of paths on simultaneous multi-path communication. In Proceedings of the IEEE/IPSJ International Symposium on Applications and the Internet, Munich, Germany, 18–21 July 2011; pp. 214–217. [Google Scholar]
- Liao, J.; Wang, J.; Li, T.; Zhu, X. Introducing multipath selection for concurrent multipath transfer in the future internet. Comput. Netw. 2011, 55, 1024–1035. [Google Scholar] [CrossRef]
- He, J.; Rexford, J. Toward internet-wide multipath routing. IEEE Netw. 2008, 22, 16–21. [Google Scholar]
- Li, J.; Wang, X.; Li, F.; Jia, J. Efficient traffic aware multipath routing algorithm in cognitive networks. In Proceedings of the IEEE Fifth International Conference on Genetic and Evolutionary Computing, Xiamen, China, 29 August–1 September 2011; pp. 303–306. [Google Scholar]
- Chen, M.; Challita, U.; Saad, W.; Yin, C.; Debbah, M. Machine learning for wireless networks with artificial intelligence: A tutorial on neural networks. arXiv 2017, arXiv:1710.02913. [Google Scholar]
- Chandrasekharan, S.; Gomez, K.; Al-Hourani, A.; Kandeepan, S.; Rasheed, T.; Goratti, L.; Reynaud, L.; Grace, D.; Bucaille, I.; Wirth, T.; et al. Designing and implementing future aerial communication networks. IEEE Commun. Mag. 2016, 54, 26–34. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Lu, T.; Xu, W.; Yuen, M. Distributed and multi-layer UAV network for the next-generation wireless communication. arXiv 2018, arXiv:1805.01534. [Google Scholar]
- Hellaoui, H.; Bekkouche, O.; Bagaa, M.; Taleb, T. Aerial Control System for Spectrum Efficiency in UAV-to-Cellular Communications. IEEE Commun. Mag. 2018, 56, 108–113. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-powered airplanes: A historical perspective and future challenges. Prog. Aerosp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Topic | Focus | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Routing | Mobility Models | Applications | Motivation | Comparison with other ad hoc Networks | Requirements | Mobility Models | Taxonomy | Objectives | Challenges | Routing Metrics | Characteristics | Performance Measures | Frame work | Open issues | ||
| Axel et al. [2] | 2010 | × | × | × | ||||||||||||
| Bauer et al. [28] | 2011 | × | × | × | × | |||||||||||
| Neji et al. [29] | 2013 | × | × | × | × | × | ||||||||||
| Bekmezci et al. [7] | 2013 | × | × | × | × | × | × | × | × | × | ||||||
| Ozgur et al. [18] | 2013 | × | × | × | × | × | × | |||||||||
| Xie et al. [30] | 2014 | × | × | × | × | × | × | |||||||||
| Naser et al. [31] | 2016 | × | × | × | × | × | × | × | ||||||||
| Gupta et al. [32] | 2016 | × | × | × | × | × | × | × | × | |||||||
| Samira et al. [33] | 2016 | × | × | × | × | × | × | |||||||||
| Armir et al. [34] | 2017 | × | × | × | × | × | × | |||||||||
| Omar et al. [35] | 2017 | × | × | × | × | × | × | × | × | |||||||
| Zeeshan et al. [36] | 2018 | × | × | × | × | × | × | |||||||||
| Khan et al. [37] | 2018 | × | × | × | × | × | × | × | ||||||||
| Antonio et al. [38] | 2018 | × | × | × | × | × | × | |||||||||
| Kaur et al. [39] | 2018 | × | × | × | × | × | × | × | ||||||||
| Otto et al. [40] | 2018 | × | × | × | × | × | × | × | × | |||||||
| Jinfang et al. [41] | 2018 | × | × | × | × | × | × | |||||||||
| Our paper | 2019 | × | × | × | × | × | × | × | × | × | × | × | × | × | ||
| Category | MANETs | VANETs | FANETs | |
|---|---|---|---|---|
| Types of link | Ad hoc | Yes | Yes | Yes |
| Direct link | Yes | Yes | Yes | |
| Satellite | No | No | Yes | |
| Cellular | No | Yes | Yes | |
| Characteristics | Mobility degree | Low | Medium | High |
| Mobility Models | Random way point | Prediction based | SRCM, Realistic | |
| Energy constraint | High | Low | Medium | |
| Radio propagation model | NLOS | NLOS | LOS | |
| Localization method | GPS | Assisted-GPS, differential-GPS | Inertia measurement unit | |
| Node density | High | Medium | Low |
| Category | Stage | Details | Outcomes |
|---|---|---|---|
| Adaptive | First | Nodes exchange messages among themselves and prediction to localize the nodes in the space | Neighbor sets, network typologies, and location |
| Second | Use routing metrics and select route | Establishment of routing path | |
| Proactive | First | Nodes exchange messages among themselves | Neighbor sets and network typologies are formed |
| Second | Use routing metrics and select route | Establishment of routing path | |
| Third | Reestablishment of route to cater dynamicity | New routes are established | |
| Reactive | First | Nodes exchange messages among themselves and send route requests (RREQs) from source nodes towards the destination node | Neighbor sets, network typologies, and route identification |
| Second | Response of RREQ from destination node towards the source node | Route chosen by RREP | |
| Hybrid | First | Nodes exchange messages among themselves | Neighbor sets and network typologies are formed |
| Second | Non-clustered nodes elect CHs | CHs are elected | |
| Third | Non-clustered nodes join clusters | Clusters are formed |
| Reference | Year | Approach | Objectives | Challenges | Routing Metrics | Charac-Teristic | Performance Measures | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| F.1 Adaptive | F.2 Proactive | F.3 Reactive | F.4 Hybrid | O.1 Enhancing routing stability | O.2 Enhancing network coverage | O.3 Enhancing routing performance and QoS | X.1 High dynamicity | X.2 High cost | X.3 Low residual energy | M.1 Mobility metrics | M.2 Link expiration time | M.3 Geographical location | M.4 Residual energy | M.5 Node identity | C.1.1 Hop-by-hop routing | C.1.2 Source routing | P.1 Higher QoS performance | P.2 Lower energy consumption | P.3 Lower number of clusters | P.4 Higher route setup success rate | ||
| Zheng et al. [100] | 2018 | × | × | × | × | × | × | × | × | × | × | |||||||||||
| Khelifi et al. [99] | 2018 | × | × | × | × | × | × | × | × | × | × | × | ||||||||||
| Alshabtat et al. [112] | 2010 | × | × | × | × | × | × | × | × | |||||||||||||
| Rosati et al. [124] | 2016 | × | × | × | × | × | × | × | × | × | × | |||||||||||
| Ganbayar et al. [125] | 2017 | × | × | × | × | × | × | × | × | × | ||||||||||||
| Omar et al. [101] | 2017 | × | × | × | × | × | × | × | × | × | ||||||||||||
| Biomo et al. [126] | 2014 | × | × | × | × | × | × | × | × | × | × | |||||||||||
| Ali et al. [102] | 2018 | × | × | × | × | × | × | × | × | × | × | × | ||||||||||
| Yu et al. [103] | 2016 | × | × | × | × | × | × | × | × | × | × | × | ||||||||||
| Open Issue | Purpose | Challenges | Proposed Solutions |
|---|---|---|---|
| Minimizing the effects of frequent link disconnections to improve routing | Reducing packet retransmission and reestablishing routes |
| Predicting the next geographical location of a UAV in route selection and maintenance. |
| Performing routing in the multi-UAV swarm scenarios | Managing massive amount of data due to ultra-densification |
| Predicting the next geographical location of a UAV. |
| Performing clustering for supporting routing in multi-UAVs | Deploying collaborative tasks, including data aggregation, load distribution, and resource distribution |
| Using context-aware approaches, such as artificial intelligence approaches and bio-inspired algorithms |
| Enhancing mobility models for the investigation of routing in FANETs | Mobility management |
| Forming mobility models based on real-life scenarios |
| Improving network performance and survivability through multi-pathing | Maximizing resource utilization and reducing network congestion |
| Artificial intelligence (AI)-based approaches |
| Improving network performance by using artificial intelligence | Optimize performance |
| Using AI approaches to improve network performance |
| Improving network coverage by using high and low altitude unmanned aerial vehicles (UAVs) | Reducing packet retransmission and reestablishing routes |
| Enabling collaboration between high and low altitude platforms |
| Reducing power consumption by using green energy | Reducing network partitioning |
| Use solar panels for extra energy backup |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, M.F.; Yau, K.-L.A.; Noor, R.M.; Imran, M.A. Routing Schemes in FANETs: A Survey. Sensors 2020, 20, 38. https://doi.org/10.3390/s20010038
Khan MF, Yau K-LA, Noor RM, Imran MA. Routing Schemes in FANETs: A Survey. Sensors. 2020; 20(1):38. https://doi.org/10.3390/s20010038
Chicago/Turabian StyleKhan, Muhammad Fahad, Kok-Lim Alvin Yau, Rafidah Md Noor, and Muhammad Ali Imran. 2020. "Routing Schemes in FANETs: A Survey" Sensors 20, no. 1: 38. https://doi.org/10.3390/s20010038
APA StyleKhan, M. F., Yau, K.-L. A., Noor, R. M., & Imran, M. A. (2020). Routing Schemes in FANETs: A Survey. Sensors, 20(1), 38. https://doi.org/10.3390/s20010038