Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign

 , , , , ,
, , , , ,  , , , , ,
, , , , ,  ,
,  ,
,  , ,
, ,  , , , , ,
, , , , ,  , , , , add
Show full author list
, , , , add
Show full author list
Abstract
1. Introduction
2. Materials and Methods
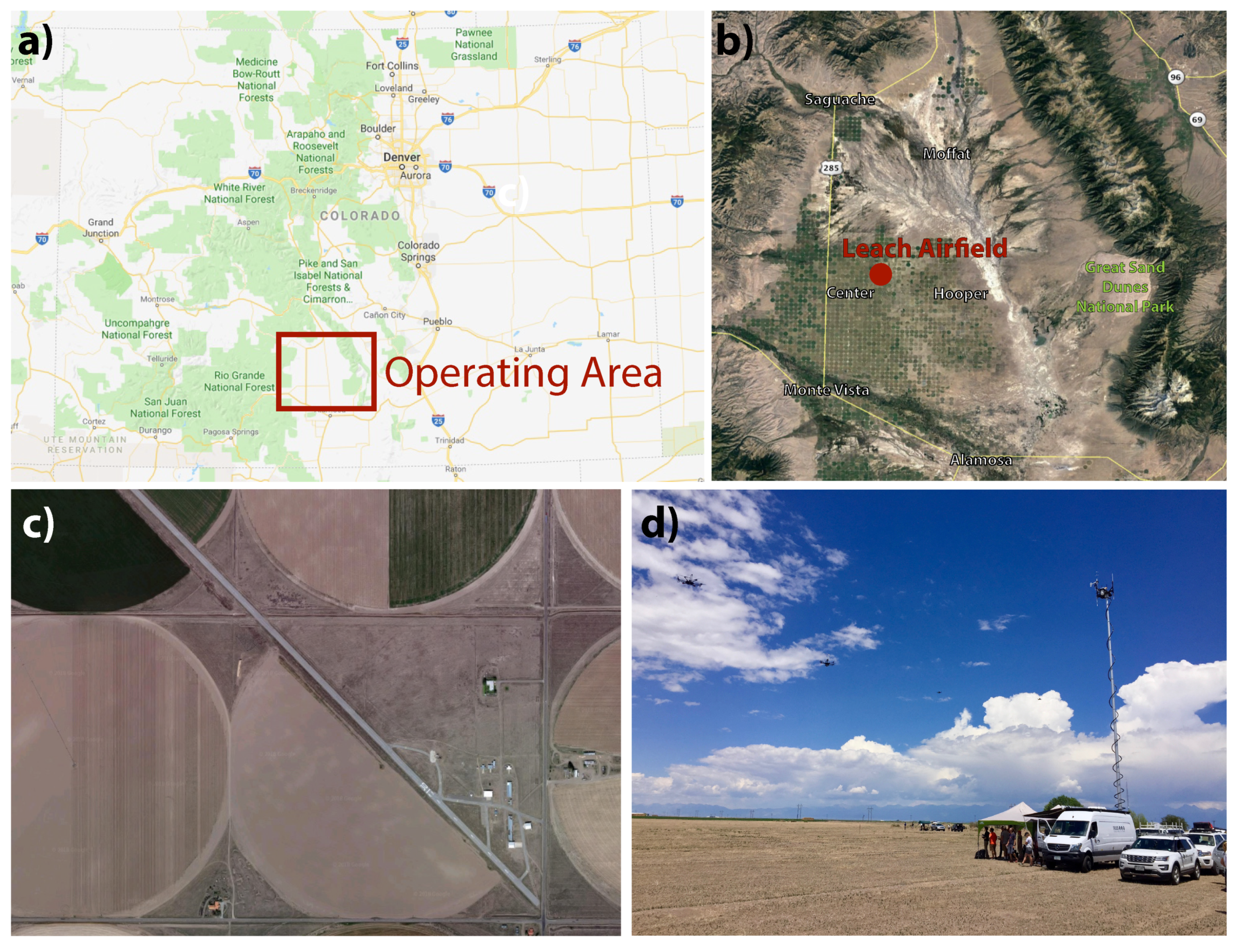
2.1. Study Site Information
2.1.1. Operations Area and Ground Instrumentation
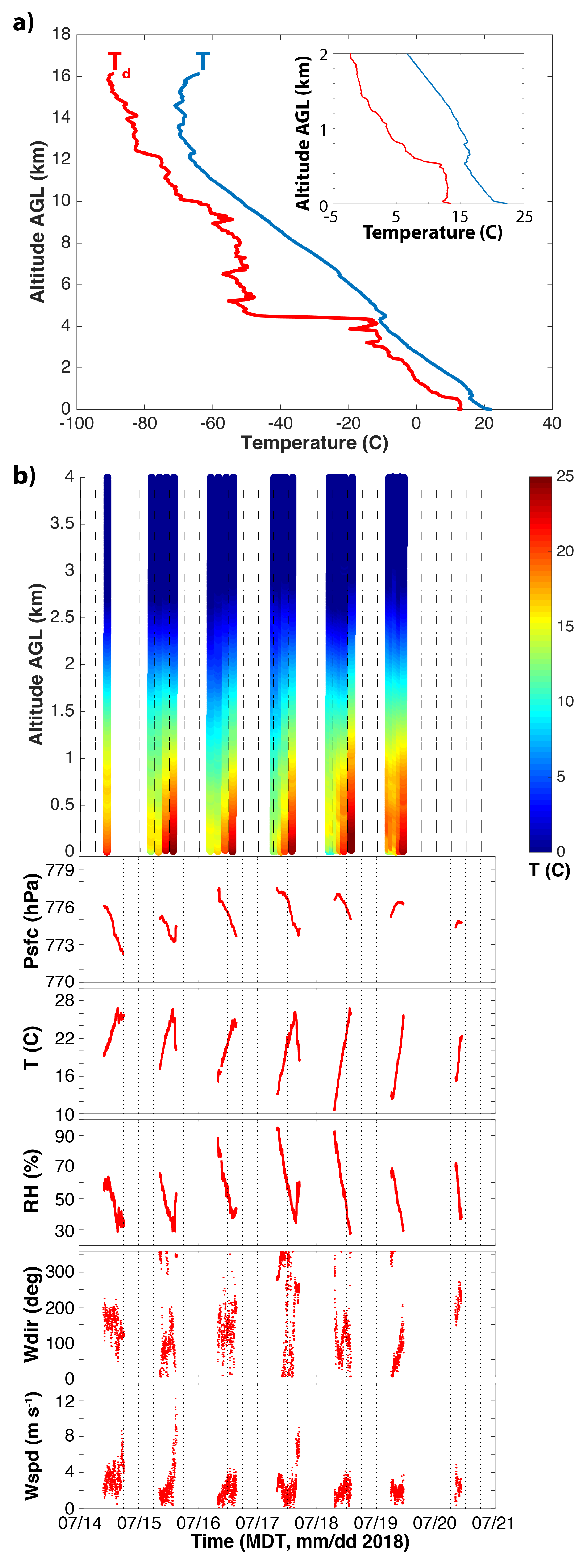
2.1.2. Weather Conditions
2.2. sUAS Platforms, Payloads and Flight Patterns
2.2.1. Multirotor Aircraft
2.2.2. Fixed-Wing Aircraft
2.2.3. Sensor Locations
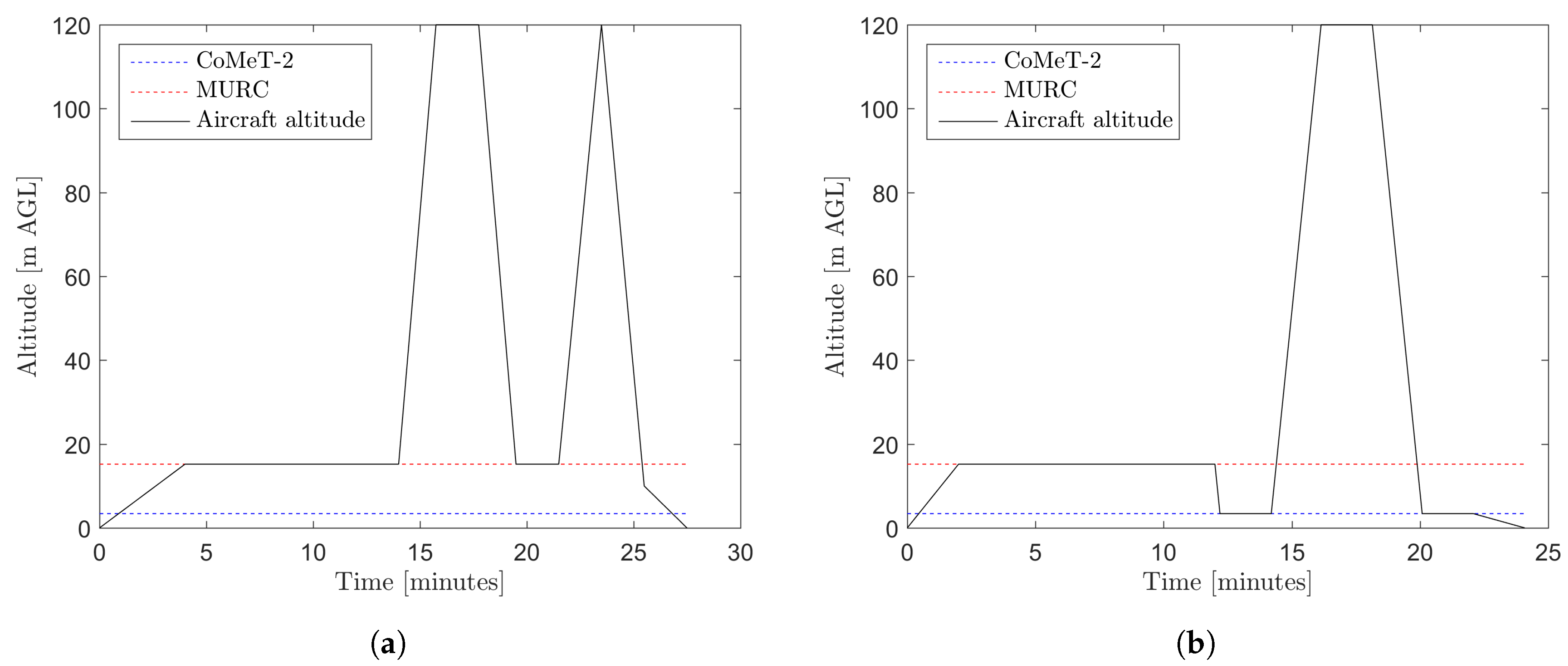
2.2.4. Flight Patterns
2.3. Data Analysis
3. Results and Discussion
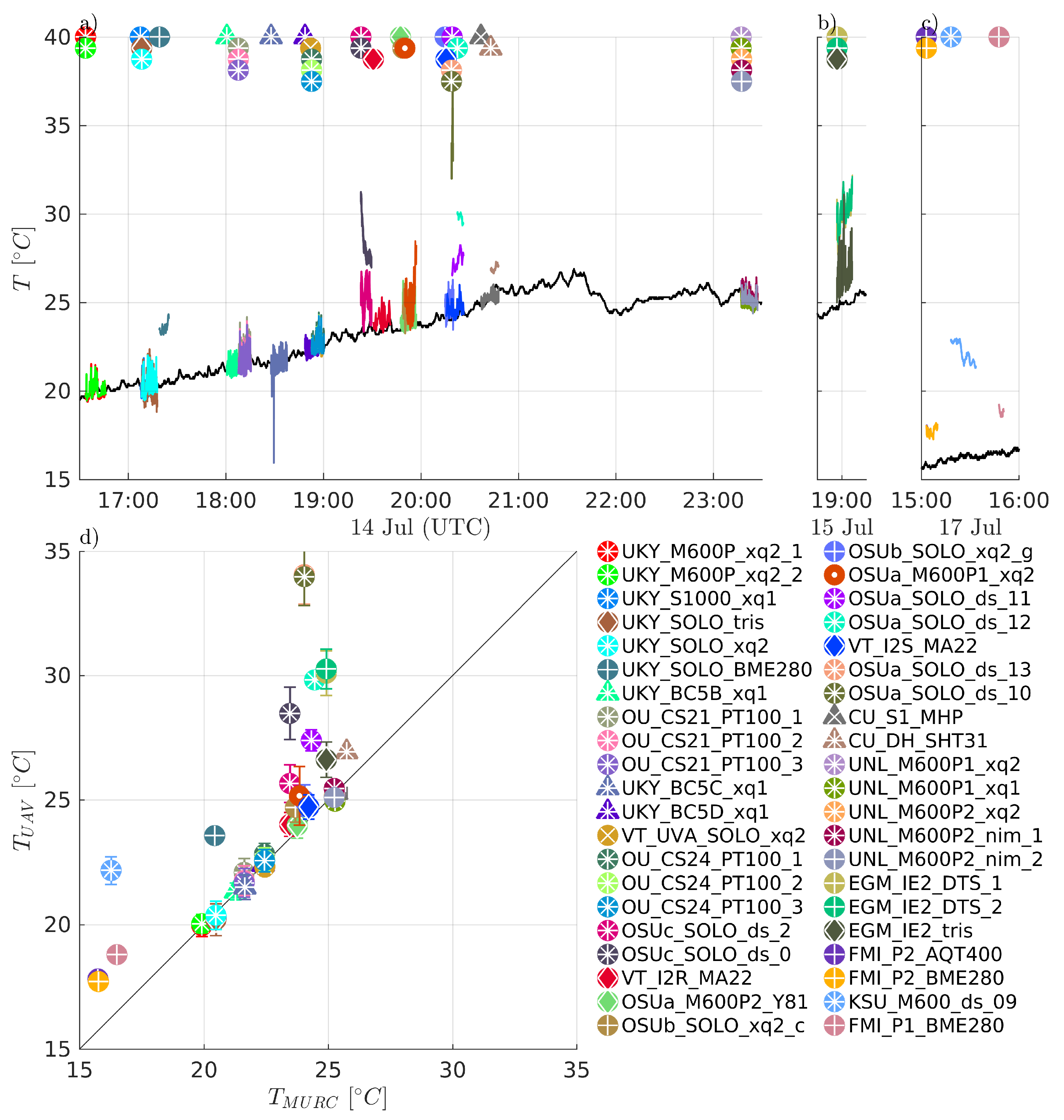
3.1. Overview of Precision and Bias Results
3.2. Overview of Time Response Results
3.3. Temperature, Relative Humidity and Pressure
3.4. Wind Speed and Direction
3.5. Time Response of Measurement Systems
3.6. Trends and Broader Discussion
4. Limitations and Future Work
4.1. Measurement Accuracy
4.2. Measurement Robustness
4.3. Data and Information Management
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AGL | Above Ground Level |
| CLAMPS | Collaborative Lower Atmospheric Mobile Profiling System |
| COA | Certificate of Authorization |
| COST | European Cooperation in Science and Technology |
| COTS | commercial off the shelf |
| FAA | Federal Aviation Administration |
| GNSS | Global Navigation Satellite System |
| ICAO | International Civil Aviation Organization |
| IMU | Inertial Measurement Unit |
| INU | Inertial Navigation Unit |
| IRISS | Integrated Remote and In-Situ Sensing program |
| ISARRA | International Society for Atmospheric Research using Remotely piloted Aircraft |
| LAPSE-RATE | Lower Atmospheric Process Studies at Elevation—a Remotely piloted Aircraft Team Experiment |
| MDT | Mountain Daylight Time |
| MSL | Meters above Sea Level |
| MURC | Mobile UAS Research Collaboratory |
| NOAA | National Oceanic and Atmospheric Administration |
| NSSL | NOAA National Severe Storms Laboratory |
| OSSEs | Observational System Simulation Experiments |
| RPAS | Remotely Piloted Aircraft System |
| sUAS | small Unmanned Aircraft System |
References
- National Academies of Sciences and Medicine. The Future of Atmospheric Boundary Layer Observing, Understanding, and Modeling: Proceedings of a Workshop; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar]
- De Boer, G.; Dalfflon, B.; Guenther, A.; Moore, D.; Schmid, B.; Serbin, S.; Vogelmann, A. Aerial Observation Needs Workshop; Technical Report; Department of Energy Climate and Environmental Sciences Division: Upton, NY, USA, 2015.
- Jacob, J.D.; Chilson, P.B.; Houston, A.L.; Smith, S.W. Considerations for Atmospheric Measurements with Small Unmanned Aircraft Systems. Atmosphere 2018, 9, 252. [Google Scholar] [CrossRef]
- Hill, M.; Konrad, T.; Meyer, J.; Rowland, J. Radio controlled small aircraft as measurement platform for meteorological sensors, discussing development and performance from field tests. Appl. Tech. Dig. 1970, 10, 11–19. [Google Scholar]
- Konrad, T.; Hill, M.; Meyer, J.; Rowland, J. A small, radio-controlled aircraft as a platform for meteorological sensors. Appl. Tech. Dig. 1970, 10, 11–19. [Google Scholar]
- Holland, G.; Webster, P.; Curry, J.; Tyrell, G.; Gauntlett, D.; Brett, G.; Becker, J.; Hoag, R.; Vaglienti, W. The Aerosonde robotic aircraft: A new paradigm for environmental observations. Bull. Am. Meteorol. Soc. 2001, 82, 889–902. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of small fixed-wing unmanned aircraft for meteorological sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Elston, J.S.; Roadman, J.; Stachura, M.; Argrow, B.; Houston, A.; Frew, E. The tempest unmanned aircraft system for in situ observations of tornadic supercells: Design and VORTEX2 flight results. J. Field Robot. 2011, 28, 461–483. [Google Scholar] [CrossRef]
- Pieri, D.C.; Diaz, J.; Bland, G.; Fladeland, M.; Makel, D.; Schwandner, F.; Buongiorno, M.; Elston, J. Unmanned Aerial Technologies for Observations at Active Volcanoes: Advances and Prospects; American Geophysical Union Fall Meeting: New Orleans, LA, USA, 2017. [Google Scholar]
- De Boer, G.; Ivey, M.; Schmid, B.; Lawrence, D.; Dexheimer, D.; Mei, F.; Hubbe, J.; Bendure, A.; Hardesty, J.; Shupe, M.D.; et al. A Bird’s-Eye View: Development of an Operational ARM Unmanned Aerial Capability for Atmospheric Research in Arctic Alaska. Bull. Am. Meteorol. Soc. 2018, 99, 1197–1212. [Google Scholar] [CrossRef]
- Kral, S.; Reuder, J.; Vihma, T.; Suomi, I.; O’Connor, E.; Kouznetsov, R.; Wrenger, B.; Rautenberg, A.; Urbancic, G.; Jonassen, M.; et al. Innovative Strategies for Observations in the Arctic Atmospheric Boundary Layer (ISOBAR)—The Hailuoto 2017 Campaign. Atmosphere 2018, 9, 268. [Google Scholar] [CrossRef]
- Bonin, T.; Chilson, P.; Zielke, B.; Fedorovich, E. Observations of the Early Evening Boundary-Layer Transition Using a Small Unmanned Aerial System. Bound.-Layer Meteorol. 2013, 146, 119–132. [Google Scholar] [CrossRef]
- Bonin, T.A.; Goines, D.C.; Scott, A.K.; Wainwright, C.E.; Gibbs, J.A.; Chilson, P.B. Measurements of the temperature structure-function parameters with a small unmanned aerial system compared with a sodar. Bound.-Layer Meteorol. 2015, 155, 417–434. [Google Scholar] [CrossRef]
- Wildmann, N.; Rau, G.A.; Bange, J. Observations of the Early Morning Boundary-Layer Transition with Small Remotely-Piloted Aircraft. Bound.-Layer Meteorol. 2015, 157, 345–373. [Google Scholar] [CrossRef]
- Lothon, M.; Lohou, F.; Pino, D.; Couvreux, F.; Pardyjak, E.; Reuder, J.; Vilà-Guerau De Arellano, J.; Durand, P.; Hartogensis, O.; Legain, D.; et al. The BLLAST field experiment: boundary-layer late afternoon and sunset turbulence. Atmos. Chem. Phys. 2014, 14, 10931–10960. [Google Scholar] [CrossRef]
- Cassano, J.J.; Maslanik, J.A.; Zappa, C.J.; Gordon, A.L.; Cullather, R.I.; Knuth, S.L. Observations of Antarctic polynya with unmanned aircraft systems. EOS Trans. Am. Geophys. Union 2010, 91, 245–246. [Google Scholar] [CrossRef]
- Van den Kroonenberg, A.; Martin, T.; Buschmann, M.; Bange, J.; Vörsmann, P. Measuring the wind vector using the autonomous mini aerial vehicle M2AV. J. Atmos. Ocean. Technol. 2008, 25, 1969–1982. [Google Scholar] [CrossRef]
- Van den Kroonenberg, A.; Bange, J. Turbulent flux calculation in the polar stable boundary layer: Multiresolution flux decomposition and wavelet analysis. J. Geophys. Res. Atmos. 2007, 112, D06112. [Google Scholar] [CrossRef]
- Jonassen, M.O.; Tisler, P.; Altstädter, B.; Scholtz, A.; Vihma, T.; Lampert, A.; König-Langlo, G.; Lüpkes, C. Application of remotely piloted aircraft systems in observing the atmospheric boundary layer over Antarctic sea ice in winter. Polar Res. 2015, 34, 25651. [Google Scholar] [CrossRef]
- Schuyler, T.J.; Guzman, M.I. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef]
- Platis, A.; Altstädter, B.; Wehner, B.; Wildmann, N.; Lampert, A.; Hermann, M.; Birmili, W.; Bange, J. An observational case study on the influence of atmospheric boundary-layer dynamics on new particle formation. Bound.-Layer Meteorol. 2016, 158, 67–92. [Google Scholar] [CrossRef]
- Corrigan, C.; Roberts, G.; Ramana, M.; Kim, D.; Ramanathan, V. Capturing vertical profiles of aerosols and black carbon over the Indian Ocean using autonomous unmanned aerial vehicles. Atmos. Chem. Phys. 2008, 8, 737–747. [Google Scholar] [CrossRef]
- De Boer, G.; Ivey, M.; Schmid, B.; McFarlane, S.; Petty, R. Unmanned Platforms Monitor the Arctic Atmosphere. EOS 2016, 97, 1033–1056. [Google Scholar] [CrossRef]
- Ramanathan, V.; Ramana, M.V.; Roberts, G.; Kim, D.; Corrigan, C.; Chung, C.; Winker, D. Warming trends in Asia amplified by brown cloud solar absorption. Nature 2007, 448, 575. [Google Scholar] [CrossRef]
- Roberts, G.; Ramana, M.; Corrigan, C.; Kim, D.; Ramanathan, V. Simultaneous observations of aerosol–cloud–albedo interactions with three stacked unmanned aerial vehicles. Proc. Natl. Acad. Sci. USA 2008, 105, 7370–7375. [Google Scholar] [CrossRef]
- Cione, J.; Kalina, E.; Uhlhorn, E.; Farber, A.; Damiano, B. Coyote unmanned aircraft system observations in Hurricane Edouard (2014). Earth Space Sci. 2016, 3, 370–380. [Google Scholar] [CrossRef]
- Houston, A.L.; Argrow, B.; Elston, J.; Lahowetz, J.; Frew, E.W.; Kennedy, P.C. The collaborative Colorado–Nebraska unmanned aircraft system experiment. Bull. Am. Meteorol. Soc. 2012, 93, 39–54. [Google Scholar] [CrossRef]
- Balsley, B.B.; Lawrence, D.A.; Woodman, R.F.; Fritts, D.C. Fine-scale characteristics of temperature, wind, and turbulence in the lower atmosphere (0–1300 m) over the south Peruvian coast. Bound.-Layer Meteorol. 2013, 147, 165–178. [Google Scholar] [CrossRef][Green Version]
- Witte, B.M.; Singler, R.F.; Bailey, S.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef]
- Wildmann, N.; Hofsäß, M.; Weimer, F.; Joos, A.; Bange, J. MASC—A small Remotely Piloted Aircraft (RPA) for wind energy research. Adv. Sci. Res. 2014, 11, 55–61. [Google Scholar] [CrossRef]
- Reuder, J.; Båserud, L.; Kral, S.; Kumer, V.; Wagenaar, J.W.; Knauer, A. Proof of concept for wind turbine wake investigations with the RPAS SUMO. Energy Procedia 2016, 94, 452–461. [Google Scholar] [CrossRef]
- Finn, A.; Rogers, K. Improving Unmanned Aerial Vehicle–Based Acoustic Atmospheric Tomography by Varying the Engine Firing Rate of the Aircraft. J. Atmos. Ocean. Technol. 2016, 33, 803–816. [Google Scholar] [CrossRef]
- Hemingway, B.L.; Frazier, A.E.; Elbing, B.R.; Jacob, J.D. Vertical sampling scales for atmospheric boundary layer measurements from small unmanned aircraft systems (sUAS). Atmosphere 2017, 8, 176. [Google Scholar] [CrossRef]
- Lange, M.; Reuder, J. UAS Report COST Action ES0802 Unmanned Aerial Systems in Atmospheric Research; Technical Report; COST: Brussels, Belgium, 2013. [Google Scholar]
- Vömel, H.; Argrow, B.; Axisa, D.; Chlson, P.; Ellis, S.; Fladeland, M.; Frew, E.; Jacob, J.; Lord, M.; Moore, J.; et al. The NCAR/EOL Community Workshop On Unmanned Aircraft Systems For Atmospheric Research. 2018. Available online: https://www.eol.ucar.edu/node/13299 (accessed on 30 April 2019).
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and sensor integration influences on temperature measurements by rotary-wing unmanned aircraft systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef] [PubMed]
- Straka, J.M.; Rasmussen, E.N.; Fredrickson, S.E. A mobile mesonet for finescale meteorological observations. J. Atmos. Ocean. Technol. 1996, 13, 921–936. [Google Scholar] [CrossRef]
- Administration, F.A. Part 107 of the Small Unmanned Aircraft Regulations. 2016. Available online: https://www.faa.gov/news/fact_sheets/news_story.cfm?newsId=20516 (accessed on 26 April 2019).
- Foster, N.P.; Pinkerman, C.W.; Jacob, J.D. Meteorological Data Collection for Three-Dimensional Forecasting Advancements. In Proceedings of the 8th AIAA Atmospheric and Space Environments Conference, Washington, DC, USA, 13–17 June 2016; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2016. [Google Scholar]
- Nolan, P.; Pinto, J.; González-Rocha, J.; Jensen, A.; Vezzi, C.; Bailey, S.; de Boer, G.; Diehl, C.; Laurence, R.; Powers, C.; et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors 2018, 18, 4448. [Google Scholar] [CrossRef]
- Langelaan, J.W.; Alley, N.; Neidhoefer, J. Wind Field Estimation for Small Unmanned Aerial Vehicles. J. Guid. Control Dyn. 2011, 34, 1016–1030. [Google Scholar] [CrossRef]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; Wekker, S.F.J.D. Wind Estimation in the Lower Atmosphere Using Multirotor Aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Johansen, T.A.; Cristofaro, A.; Sorensen, K.L.; Hansen, J.M.; Fossen, T.I. On estimation of wind velocity, angle-of-attack and sideslip angle of small UAVs using standard sensors. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 510–519. [Google Scholar]
- Neumann, P.P.; Bartholmai, M. Real-time wind estimation on a micro unmanned aerial vehicle using its inertial measurement unit. Sens. Actuators A Phys. 2015, 235, 300–310. [Google Scholar] [CrossRef]
- González-Rocha, J.; Woolsey, C.A.; Sultan, C.; De Wekker, S.F. Sensing Wind from Quadrotor Motion. J. Guid. Control Dyn. 2019, 42, 836–852. [Google Scholar] [CrossRef]
- Donnell, G.W.; Feight, J.A.; Lannan, N.; Jacob, J.D. Wind Characterization Using Onboard IMU of sUAS. In Proceedings of the 2018 Atmospheric Flight Mechanics Conference. American Institute of Aeronautics and Astronautics, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar]
- Roadman, J.; Elston, J.; Argrow, B.; Frew, E. Mission Performance of the Tempest Unmanned Aircraft System in Supercell Storms. J. Aircr. 2012, 49, 1821–1830. [Google Scholar] [CrossRef]
- Elston, J.; Argrow, B.; Frew, E.; Houston, A.; Straka, J. Evaluation of unmanned aircraft systems for severe storm sampling using hardware-in-the-loop simulations. J. Aerosp. Comput. Inf. Commun. 2011, 8, 269–294. [Google Scholar] [CrossRef]
- Vaisala. Vaisala Radiosonde RS92; Vaisala: Vantaa, Finland, 2013. [Google Scholar]
- Aeroprobe. Aeroprobe Micro Air Data System User Manual, 2nd ed.; Aeroprobe Corporation: Christiansburg, VA, USA, 2016. [Google Scholar]
- Telionis, D.; Yang, Y.; Rediniotis, O. Recent Developments in Multi-Hole Probe (MHP) Technology. In Proceedings of the 20th International Congress of Mechanical Engineering, Gramado, Brazil, 15–20 November 2009. [Google Scholar]
- VectorNav Technologies. VN-200 User Manual; Document Revision 2.03. 2015. Available online: https://www.vectornav.com/docs/default-source/documentation/vn-200-documentation/vn-200-user-manual-(um004).pdf?sfvrsn=3a9ee6b9_23 (accessed on 30 April 2019).
- VectorNav Technologies. VN-200 GPS/INS Specifications. 2017. Available online: http://www.vectornav.com/products/vn-200/specifications (accessed on 26 June 2017).
- TE Connectivity. MS8607-02BA01. 2015. Available online: https://www.te.com/commerce/DocumentDelivery/DDEController?Action=showdoc&DocId=Data+Sheet%7FMS8607-02BA01%7FB3%7Fpdf%7FEnglish%7FENG_DS_MS8607-02BA01_B3.pdf%7FCAT-BLPS0018 (accessed on 30 April 2019).
- Ublox. CAM-M8. 2016. Available online: https://www.u-blox.com/sites/default/files/CAM-M8-FW3_DataSheet_%28UBX-15031574%29.pdf (accessed on 30 April 2019).
- Lawrence, D.A.; Balsley, B.B. High-Resolution Atmospheric Sensing of Multiple Atmospheric Variables Using the DataHawk Small Airborne Measurement System. J. Atmos. Ocean. Technol. 2013, 30, 2352–2366. [Google Scholar] [CrossRef]
- Luce, H.; Kantha, L.; Hashiguchi, H.; Lawrence, D.; Yabuki, M.; Tsuda, T.; Mixa, T. Comparisons between high-resolution profiles of squared refractive index gradient M2 measured by the Middle and Upper Atmosphere Radar and unmanned aerial vehicles (UAVs) during the Shigaraki UAV-Radar Experiment 2015 campaign. Ann. Geophys. 2017, 35, 423–441. [Google Scholar] [CrossRef]
- Balsley, B.B.; Lawrence, D.A.; Fritts, D.C.; Wang, L.; Wan, K.; Werne, J. Fine Structure, Instabilities, and Turbulence in the Lower Atmosphere: High-Resolution In Situ Slant-Path Measurements with the DataHawk UAV and Comparisons with Numerical Modeling. J. Atmos. Ocean. Technol. 2018, 35, 619–642. [Google Scholar] [CrossRef]
- Nichols, T.; Argrow, B.; Kingston, D. Error Sensitivity Analysis of Small UAS Wind-Sensing Systems. In Proceedings of the AIAA Information Systems-AIAA Infotech @ Aerospace, Grapevine, TX, USA, 9–13 January 2017; p. 0647. [Google Scholar]
- Geske, J.; MacDougal, M.; Stahl, R.; Wagener, J.; Snyder, D.R. Miniature laser rangefinders and laser altimeters. In Proceedings of the 2008 IEEE Avionics, Fiber-Optics and Photonics Technology Conference, San Diego, CA, USA, 30 September–2 October 2008; pp. 53–54. [Google Scholar]
- Privé, N.C.; Xie, Y.; Koch, S.; Atlas, R.; Majumdar, S.J.; Hoffman, R.N. An Observing System Simulation Experiment for the Unmanned Aircraft System Data Impact on Tropical Cyclone Track Forecasts. Mon. Weather Rev. 2014, 142, 4357–4363. [Google Scholar] [CrossRef]
- Houston, A.; Keeler, J. Assimilation of UAS-Supercell Datasets in an OSSE Framework. In Proceedings of the AMS 22nd Conference on Integrated Observing and Assimilation Systems for the Atmosphere, Oceans, and Land Surface, Austin, TX, USA, 9 January 2018. [Google Scholar]
- Houston, A.; Keeler, J. The Impact of Sensor Response and Airspeed on the Representation of Atmospheric Boundary Layer Phenomena by Airborne Instruments. J. Atmos. Ocean. Technol. 2018, 35, 1687–1699. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operator | Airframe | Type | QTY | Measures | Sensor | Config. | Legend | |||
|---|---|---|---|---|---|---|---|---|---|---|
| CU | Data Hawk2 | FW | 3 | Sensiron SHT-31 | 3 | CU_DH_SHT31 | ||||
| TE MS-5611 | CU_DH_MS5611 | |||||||||
| Cold-wire | 3 * | |||||||||
| Aircraft Dynamics | CU_DH_IMU | |||||||||
| Mistral | FW | 1 | BST MHP | 5 * | ||||||
| TTwistor | FW | 1 | Vaisala PTU module | 3 * | ||||||
| Aeroprobe MHP | * | |||||||||
| Talon-3 | FW | 1 | Vaisala PTU module | 3 * | ||||||
| TE MS8607 | * | |||||||||
| CU-BST | S1 | FW | 1 | BST MHP | 5 | CU_S1_MHP | ||||
| S2 | FW | 1 | BST MHP | 5 * | ||||||
| EGM | Intense Eye V2 | R | 1 | DTS Flex (×2) | 4 | EGIM_IE2_DTS_# | ||||
| TriSonica Mini WS | 1 | EGM_IE2_tris | ||||||||
| FMI | Tarot Hex | R | 2 | Bosch BME 280 | 4 | FMI_P#_BME280 | ||||
| Vaisala AQT400 | 4 | FMI_P2_AQT400 | ||||||||
| KSU | M600 | R | 1 | OSU MDASS | 3 | KSU_M600_ds_09 | ||||
| OSU-A, OSU-C | SOLO | R | 6 | OSU MDASS | 3 | OSU#_SOLO_ds_## | ||||
| OSU-A | M600 | R | 1 | iMetXQ2 | 2 | OSUa_M600P1_xq2 | ||||
| OSU MDASS | 3 * | |||||||||
| FT205 | 1 * | |||||||||
| M600 | R | 1 | OSU MDASS | 3 * | ||||||
| Young 81000 | 1 | OSUa_M600P2_Y81 | ||||||||
| OSU-B | SOLO | R | 3 | iMet XQ2 | 4 | OSU_SOLO_xq2_# | ||||
| OU | Coptersonde 2 | R | 3 | TE MS5611 | OU_CS2#_MS5611 | |||||
| IS HYT271 | 4 | OU_CS2#_HYT271_# | ||||||||
| iMet Therm. () | 3 | OU_CS2#_PT100_# | ||||||||
| Aircraft Dynamics | OU_CS2#_IMU | |||||||||
| UKY | M600 | R | 1 | iMetXQ2 (×2) | 3 | UKY_M600P_xq2_# | ||||
| SOLO | R | 1 | iMetXQ2 | 3 | UKY_SOLO_xq2 | |||||
| TriSonica Mini | 1 | UKY_SOLO_tris | ||||||||
| SOLO | R | 1 | Bosch BME 280 | 4 | UKY_SOLO_BME280 | |||||
| S1000 | R | 1 | iMetXQ | 3 | UKY_S1000_xq1 | |||||
| BLUECAT5 | FW | 3 | iMetXQ | 3 | UKY_BC5#_xq1 | |||||
| Custom MHP | UKY_BC5#_MHP | |||||||||
| UNL | M600 | R | 1 | iMetXQ | 3 | UNL_M600P1_xq1 | ||||
| iMetXQ2 | 3 | UNL_M600P1_xq2 | ||||||||
| M600 | R | 1 | iMetXQ2 | 3 | UNL_M600P2_xq2 | |||||
| Nimbus PTH | 3 | UNL_M600P2_nim_1 | ||||||||
| Nimbus PTH | 4 | UNL_M600P2_nim_2 | ||||||||
| VT, VT-UVA | SOLO | R | 1 | iMet XQ | Aircraft Dynamics | 5 | VT_UVA_SOLO_xq2 | |||
| Inspire 2 | R | 2 | Meter Atmos 22 | 1 | VT_I2#_MA22 | |||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors 2019, 19, 2179. https://doi.org/10.3390/s19092179
Barbieri L, Kral ST, Bailey SCC, Frazier AE, Jacob JD, Reuder J, Brus D, Chilson PB, Crick C, Detweiler C, et al. Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors. 2019; 19(9):2179. https://doi.org/10.3390/s19092179
Chicago/Turabian StyleBarbieri, Lindsay, Stephan T. Kral, Sean C. C. Bailey, Amy E. Frazier, Jamey D. Jacob, Joachim Reuder, David Brus, Phillip B. Chilson, Christopher Crick, Carrick Detweiler, and et al. 2019. "Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign" Sensors 19, no. 9: 2179. https://doi.org/10.3390/s19092179
APA StyleBarbieri, L., Kral, S. T., Bailey, S. C. C., Frazier, A. E., Jacob, J. D., Reuder, J., Brus, D., Chilson, P. B., Crick, C., Detweiler, C., Doddi, A., Elston, J., Foroutan, H., González-Rocha, J., Greene, B. R., Guzman, M. I., Houston, A. L., Islam, A., Kemppinen, O., ... de Boer, G. (2019). Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors, 19(9), 2179. https://doi.org/10.3390/s19092179