Finite Element Analysis for Surface Acoustic Wave Device Characteristic Properties and Sensitivity

 ,
,  , , and
, , and 
Abstract
1. Introduction
2. Experiment and Methods
2.1. Background
2.2. Model Structures
2.3. Boundary Conditions and Meshing
2.4. Frequency Response Calculation
2.5. Design and Fabrication
3. Results and Discussion
3.1. FEM Analysis of a Multi-Layer SAW Device
3.2. Conversion of Complex into Real Quantities
3.3. Effect of Layer Sensitivity
3.3.1. Frequency Shift Detection
3.3.2. Phase Shift Detection
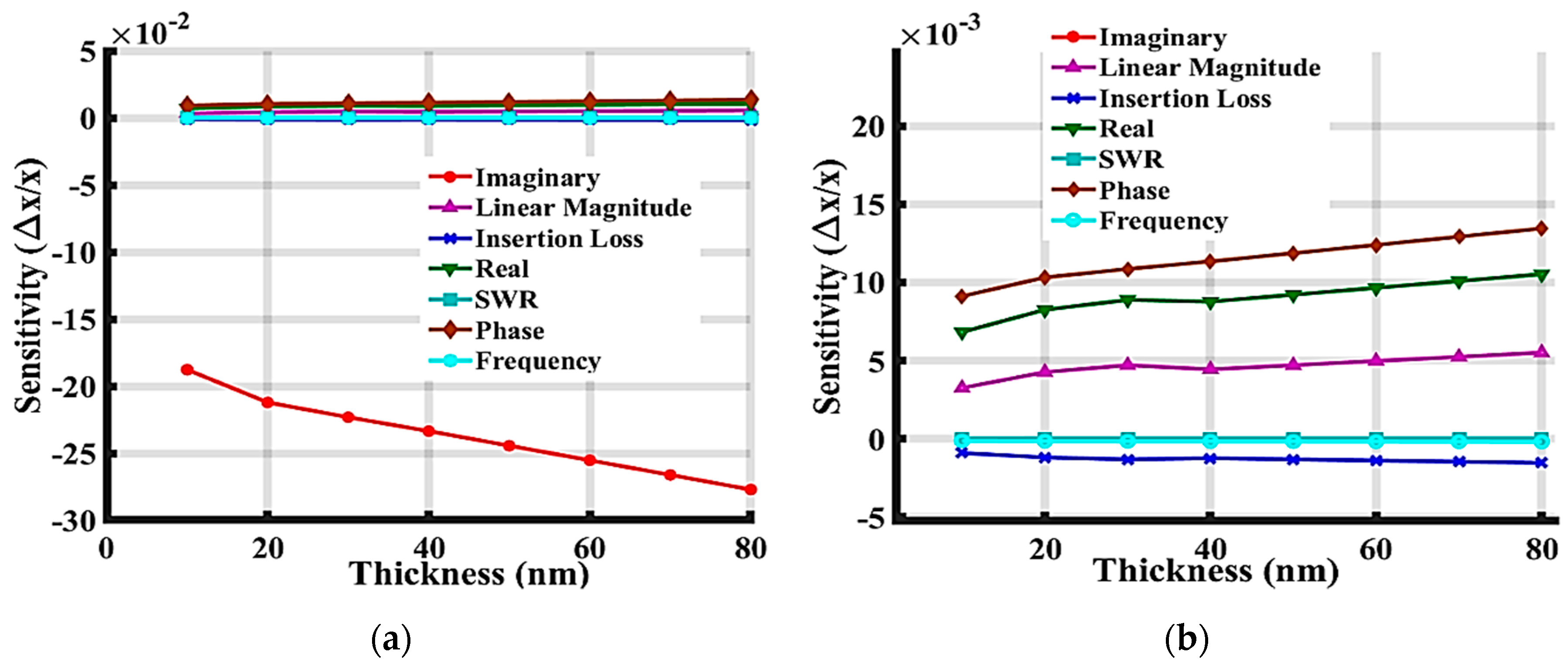
3.3.3. Sensitivity Comparison
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hashimoto, K. Surface Acoustic Wave Devices in Telecommunications; Springer: Berlin/Heidelberg, Germany, 2000; ISBN 978-3-642-08659-5. [Google Scholar]
- Hashimoto, K. Simulation of Surface Acoustic Wave Devices. Jpn. J. Appl. Phys. 2006, 45, 4423–4428. [Google Scholar] [CrossRef]
- Go, D.B.; Atashbar, M.Z.; Ramshani, Z.; Chang, H.-C. Surface acoustic wave devices for chemical sensing and microfluidics: A review and perspective. Anal. Methods 2017, 9, 4112–4134. [Google Scholar] [CrossRef]
- Guldiken, R.; Jo, M.C.; Gallant, N.D.; Demirci, U.; Zhe, J. Sheathless Size-Based Acoustic Particle Separation. Sensors 2012, 12, 905–922. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Ni, Q.; Crane, N.; Guldiken, R. Surface acoustic wave based pumping in a microchannel. Microsyst. Technol. 2017, 23, 1335–1342. [Google Scholar] [CrossRef]
- Gell, J.R.; Ward, M.B.; Young, R.J.; Stevenson, R.M.; Atkinson, P.; Anderson, D.; Jones, G.A.C.; Ritchie, D.A.; Shields, A.J. Modulation of single quantum dot energy levels by a surface-acoustic-wave. Appl. Phys. Lett. 2008, 93, 081115. [Google Scholar] [CrossRef]
- Aigner, R. SAW and BAW technologies for RF filter applications: A review of the relative strengths and weaknesses. In Proceedings of the 2008 IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008; pp. 582–589. [Google Scholar]
- Onen, O.; Sisman, A.; Gallant, N.D.; Kruk, P.; Guldiken, R. A Urinary Bcl-2 Surface Acoustic Wave Biosensor for Early Ovarian Cancer Detection. Sensors 2012, 12, 7423–7437. [Google Scholar] [CrossRef] [PubMed]
- Onen, O.; Ahmad, A.A.; Guldiken, R.; Gallant, N.D. Surface Modification on Acoustic Wave Biosensors for Enhanced Specificity. Sensors 2012, 12, 12317–12328. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yang, F.; Sun, Z.; Li, Y.-T.; Zhang, G.-J. A surface acoustic wave biosensor synergizing DNA-mediated in situ silver nanoparticle growth for a highly specific and signal-amplified nucleic acid assay. Analyst 2017, 142, 3468–3476. [Google Scholar] [CrossRef]
- Jakubik, W.; Powroźnik, P.; Wrotniak, J.; Krzywiecki, M. Theoretical analysis of acoustoelectrical sensitivity in SAW gas sensors with single and bi-layer structures. Sens. Actuators B Chem. 2016, 236, 1069–1074. [Google Scholar] [CrossRef]
- Marcu, A.; Viespe, C. Surface Acoustic Wave Sensors for Hydrogen and Deuterium Detection. Sensors 2017, 17, 1417. [Google Scholar] [CrossRef] [PubMed]
- Hashimoto, K.; Endoh, G.; Yamaguchi, M. Coupling-of-modes modelling for fast and precise simulation of leaky surface acoustic wave devices. In Proceedings of the 1995 IEEE Ultrasonics Symposium, An International Symposium, Seattle, WA, USA, 7–10 November 1995; Volume 1, pp. 251–256. [Google Scholar]
- Kuypers, J.H.; Pisano, A.P. Green’s function analysis of Lamb wave resonators. In Proceedings of the 2008 IEEE Ultrasonics Symposium, Beijing, China, 2–5 November 2008; pp. 1548–1551. [Google Scholar]
- Tewary, V.K. Green’s-function method for modeling surface acoustic wave dispersion in anisotropic material systems and determination of material parameters. Wave Motion 2004, 40, 399–412. [Google Scholar] [CrossRef]
- Park, K.-C.; Yoon, J.R. Transmission Line Matrix Modeling for Analysis of Surface Acoustic Wave Hydrogen Sensor. Jpn. J. Appl. Phys. 2011, 50, 07HD06. [Google Scholar] [CrossRef]
- Kojima, T.; Obara, H.; Shibayama, K. Investigation of Impulse Response for an Interdigital Surface-Acoustic-Wave Transducer. Jpn. J. Appl. Phys. 1990, 29, 125. [Google Scholar] [CrossRef]
- Hoang, T. SAW Parameters Analysis and Equivalent Circuit of SAW Device. In Acoustic Waves—From Microdevices to Helioseismology; InTech: Rijeka, Croatia, 2011. [Google Scholar]
- Kojima, T.; Shibayama, K. An Analysis of an Equivalent Circuit Model for an Interdigital Surface-Acoustic-Wave Transducer. Jpn. J. Appl. Phys. 1988, 27, 163. [Google Scholar] [CrossRef]
- Smith, W.R.; Gerard, H.M.; Collins, J.H.; Reeder, T.M.; Shaw, H.J. Design of Surface Wave Delay Lines with Interdigital Transducers. IEEE Trans. Microw. Theory Technol. 1969, 17, 865–873. [Google Scholar] [CrossRef]
- Kshetrimayum, R.; Yadava, R.D.S.; Tandon, R.P. Mass sensitivity analysis and designing of surface acoustic wave resonators for chemical sensors. Meas. Sci. Technol. 2009, 20, 055201. [Google Scholar] [CrossRef]
- Takeuchi, M.; Yamanouchi, K. Field analysis o SAW single-phase unidirectional transducers using internal floating electrodes. In Proceedings of the IEEE 1988 Ultrasonics Symposium Proceedings, Chicago, IL, USA, 2–5 October 1988; pp. 57–61. [Google Scholar]
- Shu, L.; Peng, B.; Li, C.; Gong, D.; Yang, Z.; Liu, X.; Zhang, W. The Characterization of Surface Acoustic Wave Devices Based on AlN-Metal Structures. Sensors 2016, 16, 526. [Google Scholar] [CrossRef]
- Onen, O.; Guldiken, R. Investigation of guided surface acoustic wave sensors by analytical modeling and perturbation analysis. Sens. Actuators A Phys. 2014, 205, 38–46. [Google Scholar] [CrossRef]
- Wang, T. Optimization and Characterization of Integrated Microfluidic Surface Acoustic Wave Sensors and Transducers. Ph.D. Thesis, University of South Florida, Tampa, FL, USA, 2016. [Google Scholar]
- Xu, G. Direct finite-element analysis of the frequency response of a Y-Z lithium niobate SAW filter. Smart Mater. Struct. 2000, 9, 973–980. [Google Scholar] [CrossRef]
- Kabir, K.M.M.; Matthews, G.I.; Sabri, Y.M.; Russo, S.P.; Ippolito, S.J.; Bhargava, S.K. Development and experimental verification of a finite element method for accurate analysis of a surface acoustic wave device. Smart Mater. Struct. 2016, 25, 035040. [Google Scholar] [CrossRef]
- EL Gowini, M.M.; Moussa, W. A Finite Element Model of a MEMS-based Surface Acoustic Wave Hydrogen Sensor. Sensors 2010, 10, 1232–1250. [Google Scholar] [CrossRef]
- Nama, N.; Barnkob, R.; Mao, Z.; Kähler, C.J.; Costanzo, F.; Huang, T.J. Numerical study of acoustophoretic motion of particles in a PDMS microchannel driven by surface acoustic waves. Lab Chip 2015, 15, 2700–2709. [Google Scholar] [CrossRef]
- Wang, T.; Green, R.; Nair, R.; Howell, M.; Mohapatra, S.; Guldiken, R.; Mohapatra, S. Surface Acoustic Waves (SAW)-Based Biosensing for Quantification of Cell Growth in 2D and 3D Cultures. Sensors 2015, 15, 32045–32055. [Google Scholar] [CrossRef]
- Padilla, S.; Tufekcioglu, E.; Guldiken, R. Simulation and verification of polydimethylsiloxane (PDMS) channels on acoustic microfluidic devices. Microsyst. Technol. 2018, 24, 3503–3512. [Google Scholar] [CrossRef]
- Rocha-Gaso, M.-I.; March-Iborra, C.; Montoya-Baides, Á.; Arnau-Vives, A. Surface Generated Acoustic Wave Biosensors for the Detection of Pathogens: A Review. Sensors 2009, 9, 5740–5769. [Google Scholar] [CrossRef]
- Namdeo, A.K.; Nemade, H.B. Simulation on Effects of Electrical Loading due to Interdigital Transducers in Surface Acoustic Wave Resonator. Procedia Eng. 2013, 64, 322–330. [Google Scholar] [CrossRef]
- Campbell, C.; Burgess, J.C. Surface Acoustic Wave Devices and Their Signal Processing Applications. J. Acoust. Soc. Am. 1991, 89, 1479–1480. [Google Scholar] [CrossRef]
- Wang, T.; Green, R.; Guldiken, R.; Mohapatra, S.; Mohapatra, S. Multiple-layer guided surface acoustic wave (SAW)-based pH sensing in longitudinal FiSS-tumoroid cultures. Biosens. Bioelectron. 2019, 124–125, 244–252. [Google Scholar] [CrossRef]
- Guthold, M.; Liu, W.; Sparks, E.A.; Jawerth, L.M.; Peng, L.; Falvo, M.; Superfine, R.; Hantgan, R.R.; Lord, S.T. A Comparison of the Mechanical and Structural Properties of Fibrin Fibers with Other Protein Fibers. Cell Biochem. Biophys. 2007, 49, 165–181. [Google Scholar] [CrossRef]
- Fu, Y.Q.; Luo, J.K.; Nguyen, N.T.; Walton, A.J.; Flewitt, A.J.; Zu, X.; Li, Y.; McHale, G.; Matthews, A.; Iborra, E.; et al. Advances in piezoelectric thin films for acoustic biosensors, acoustofluidics and lab-on-chip applications. Prog. Mater. Sci. 2017, 89, 31–91. [Google Scholar] [CrossRef]
- Rizk, M.R.M.; Abou-Bakr, E.; Nasser, A.A.A.; El-Badawy, E.-S.A.; Mahros, A.M. On the investigation of voltage standing wave ratio to design a low noise wideband microwave amplifier. In Proceedings of the 2016 Eighth International Conference on Ubiquitous and Future Networks (ICUFN), Vienna, Austria, 5–8 July 2016; pp. 568–572. [Google Scholar]
- Chang, K.; Pi, Y.; Lu, W.; Wang, F.; Pan, F.; Li, F.; Jia, S.; Shi, J.; Deng, S.; Chen, M. Label-free and high-sensitive detection of human breast cancer cells by aptamer-based leaky surface acoustic wave biosensor array. Biosens. Bioelectron. 2014, 60, 318–324. [Google Scholar] [CrossRef]
- Di Pietrantonio, F.; Benetti, M.; Cannatà, D.; Verona, E.; Girasole, M.; Fosca, M.; Dinarelli, S.; Staiano, M.; Marzullo, V.M.; Capo, A.; et al. A Shear horizontal surface acoustic wave biosensor for a rapid and specific detection of d-serine. Sens. Actuators B Chem. 2016, 226, 1–6. [Google Scholar] [CrossRef]
- Dobson, P.J. Handbook of Biosensors and Biosensor Kinetics, by A.Sadana and N. Sadana. Contemp. Phys. 2011, 52, 617–618. [Google Scholar] [CrossRef]
- Länge, K.; Blaess, G.; Voigt, A.; Götzen, R.; Rapp, M. Integration of a surface acoustic wave biosensor in a microfluidic polymer chip. Biosens. Bioelectron. 2006, 22, 227–232. [Google Scholar] [CrossRef]
- Bisoffi, M.; Hjelle, B.; Brown, D.C.; Branch, D.W.; Edwards, T.L.; Brozik, S.M.; Bondu-Hawkins, V.S.; Larson, R.S. Detection of viral bioagents using a shear horizontal surface acoustic wave biosensor. Biosens. Bioelectron. 2008, 23, 1397–1403. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PARAMETERS | SETTINGS |
|---|---|
| Wavelength (λ) | 298 μm |
| Number of fingers | 20 pairs |
| Finger width | 74.5 μm |
| Wavelength of reflecting fingers | 298 μm |
| Number of reflecting fingers | 30 pairs |
| SAW velocity | 4160 m/s |
| Material Properties | Units | Lithium Tantalate | ZnO | Cr | IrO2 | Protein Fiber Layer |
|---|---|---|---|---|---|---|
| Density | (kg/m3) | 4700 | 5680 | 7150 | 11660 | 1350 |
| Young’s Modulus | (GPa) | 279 | 322.8 | 0.07 [36] | ||
| Poisson’s ratio | 0.21 | 0.33 | 0.44 | |||
| Elastic stiffness | ×1010 (N/m2) | 23.29 | 15.7 | |||
| Elastic stiffness | ×1010 (N/m2) | 4.69 | 8.9 | |||
| Elastic stiffness | ×1010 (N/m2) | 8.02 | 8.3 | |||
| Elastic stiffness | ×1010 (N/m2) | −1.1 | 0 | |||
| Elastic stiffness | ×1010 (N/m2) | 27.53 | 20.8 | |||
| Elastic stiffness | ×1010 (N/m2) | 8.02 | 4.3 | |||
| Elastic stiffness | ×1010 (N/m2) | 9.30 | 4.42 | |||
| Piezoelectric coefficient e15 | (C/m2) | 2.596 | −0.48 | |||
| Piezoelectric coefficient e22 | (C/m2) | 1.59 | 0 | |||
| Piezoelectric coefficient e31 | (C/m2) | 0.082 | −0.57 | |||
| Piezoelectric coefficient e33 | (C/m2) | 1.882 | 1.32 |
| Trace Format | Description | Formula |
|---|---|---|
| Lin Mag | Magnitude of z, unconverted | |z| = sqrt (x2 + y2) |
| Insertion Loss | Converted from z to S parameter | IL = −20 × log|S21| dB |
| Phase | Phase of z | φ (z) = arctan (y/x) |
| Real | Real part of z | Re(z) = x |
| Imag | Imaginary part of z | Im(z) = y |
| SWR | (Voltage) Standing Wave Ratio | SWR = (1 + |z|)/(1 − |z|) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Green, R.; Guldiken, R.; Wang, J.; Mohapatra, S.; Mohapatra, S.S. Finite Element Analysis for Surface Acoustic Wave Device Characteristic Properties and Sensitivity. Sensors 2019, 19, 1749. https://doi.org/10.3390/s19081749
Wang T, Green R, Guldiken R, Wang J, Mohapatra S, Mohapatra SS. Finite Element Analysis for Surface Acoustic Wave Device Characteristic Properties and Sensitivity. Sensors. 2019; 19(8):1749. https://doi.org/10.3390/s19081749
Chicago/Turabian StyleWang, Tao, Ryan Green, Rasim Guldiken, Jing Wang, Subhra Mohapatra, and Shyam S. Mohapatra. 2019. "Finite Element Analysis for Surface Acoustic Wave Device Characteristic Properties and Sensitivity" Sensors 19, no. 8: 1749. https://doi.org/10.3390/s19081749
APA StyleWang, T., Green, R., Guldiken, R., Wang, J., Mohapatra, S., & Mohapatra, S. S. (2019). Finite Element Analysis for Surface Acoustic Wave Device Characteristic Properties and Sensitivity. Sensors, 19(8), 1749. https://doi.org/10.3390/s19081749