Fast Volumetric Feedback under Microscope by Temporally Coded Exposure Camera


Abstract
1. Introduction
2. Synchronous Driving of TeCE Camera and TAG Lens
3. Experiment
3.1. Construction of Experimental System
3.2. Evaluation of Optical Characteristics of TeCE Camera
3.2.1. Change in Brightness Depending on Exposure Time
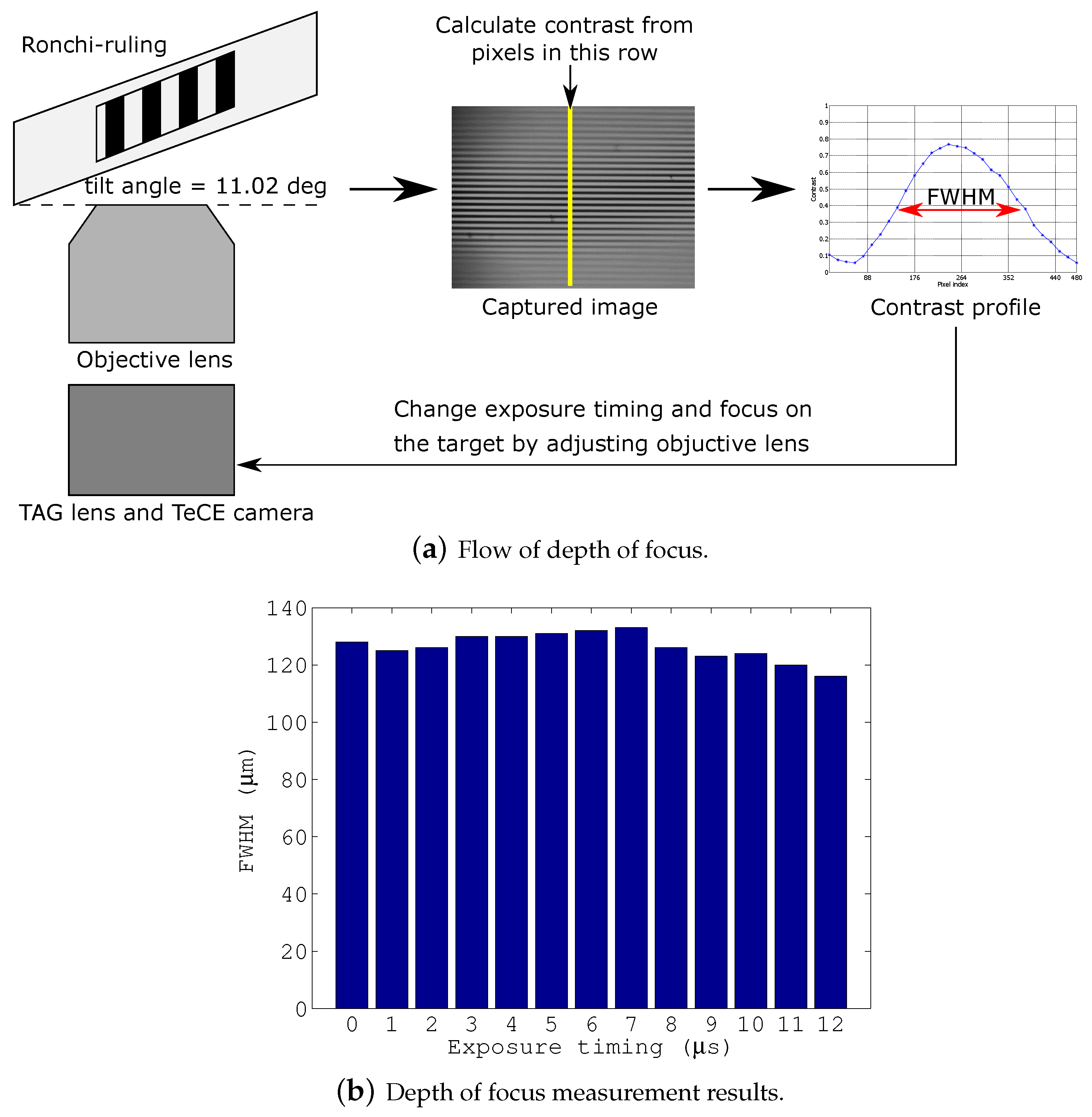
3.2.2. Depth of Field of Experimental System
3.2.3. Change in Focal Position Due to Focal Vibration of the TAG Lens
3.2.4. Resolution
3.3. Focus Tracking
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ohara, K.; Kojima, M.; Takagi, S.; Horade, M.; Mae, Y.; Arai, T. Development of the 3D measurement system in real-time for micro-manipulation. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 2022–2027. [Google Scholar]
- Tamadazte, B.; Marchand, E.; Demb, S. CAD Model-based Tracking and 3D Visual-based Control for MEMS Microassembly. Int. J. Robot. Res. 2010, 29, 1416–1434. [Google Scholar] [CrossRef]
- Cacace, T.; Paturzo, M.; Memmolo, P.; Vassalli, M.; Ferraro, P.; Fraldi, M.; Mensitieri, G. Digital holography as 3D tracking tool for assessing acoustophoretic particle manipulation. Opt. Express 2017, 25, 17746–17752. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Ozcelik, A.; Bojanala, N.; Nama, N.; Upadhyay, A.; Chen, Y.; Hanna-Rose, W.; Huang, T.J. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 11085. [Google Scholar] [CrossRef] [PubMed]
- Oku, H.; Ishikawa, M.; Theodorus; Hashimoto, K. High-speed autofocusing of a cell using diffraction patterns. Opt. Express 2006, 14, 3952–3960. [Google Scholar] [CrossRef]
- Ballantyne, G.H. Robotic surgery, telerobotic surgery, telepresence, and telementoring. Surg. Endosc. Other Interv. Tech. 2002, 16, 1389–1402. [Google Scholar] [CrossRef] [PubMed]
- Oku, H.; Ogawa, N.; Ishikawa, M.; Hashimoto, K. Two-dimensional tracking of a motile micro-organism allowing high-resolution observation with various imaging techiniques. Rev. Sci. Instrum. 2005, 76, 034301. [Google Scholar] [CrossRef]
- Nakai, Y.; Ozeki, M.; Hiraiwa, T.; Tanimoto, R.; Funahashi, A.; Hiroi, N.; Taniguchi, A.; Nonaka, S.; Boilot, V.; Shrestha, R.; et al. High-speed microscopy with an electrically tunable lens to image the dynamics of in vivo molecular complexes. Rev. Sci. Instrum. 2015, 86, 013707. [Google Scholar] [CrossRef] [PubMed]
- Oku, H.; Ishikawa, M. High-Speed Liquid lens for Computer Vision. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2643–2648. [Google Scholar]
- Fahrbach, F.O.; Voigt, F.F.; Schmid, B.; Helmchen, F.; Huisken, J. Rapid 3D light-sheet microscopy with a tunable lens. Opt. Express 2013, 21, 21010–21026. [Google Scholar] [CrossRef] [PubMed]
- Jabbour, J.M.; Malik, B.H.; Olsovsky, C.; Cuenca, R.; Cheng, S.; Jo, J.A.; Cheng, Y.-S.L.; Wright, J.M.; Maitland, K.C. Optical axial scanning in confocal microscopy using an electrically tunable lens. Biomed. Opt. Express 2013, 5, 645–652. [Google Scholar] [CrossRef] [PubMed]
- Molaei, M.; Sheng, J. Imaging bacterial 3D motion using digital in-line holographic microscopy and correlation-based de-noising algorithm. Opt. Express 2014, 22, 32119–32137. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Hong, J.; Liu, C.; Kim, M.K. Review of digital holographic microscopy for three-dimensional profiling and tracking. Opt. Eng. 2014, 53, 112306. [Google Scholar] [CrossRef]
- Cohen, N.; Yang, S.; Andalman, A.; Broxton, M.; Grosenick, L.; Deisseroth, K.; Horowitz, M.; Levoy, M. Enhancing the performance of the light field microscope using wavefront coding. Opt. Express 2014, 22, 24817–24839. [Google Scholar] [CrossRef] [PubMed]
- Mermillod-Blondin, A.; McLeod, E.; Arnold, C.B. High-speed varifocal imaging with a tunable acoustic gradient index of refraction lens. Opt. Lett. 2008, 33, 2146–2148. [Google Scholar] [CrossRef] [PubMed]
- Duocastella, M.; Sun, B.; Arnold, C.B. Simultaneous imaging of multiple focal planes for three-dimensional microscopy using ultra-high-speed adaptive optics. J. Biomed. Opt. 2012, 17, 050505. [Google Scholar] [CrossRef] [PubMed]
- Yamato, K.; Chiba, H.; Yamashita, T.; Oku, H. 1 ms 3D Feedback Microscope with 69 kHz Synchronous Modulation of Focal Position and Illumination. IEEE Robot. Autom. Lett. 2018, 3, 1978–1984. [Google Scholar] [CrossRef]
- Yamashita, T.; Chiba, H.; Yamato, K.; Oku, H. Development of a coded exposure camera for high-speed 3D measurememt using microscope. In Imaging and Applied Optics 2018 (3D, AO, AIO, COSI, DH, IS, LACSEA, LS&C, MATH, pcAOP); OSA Technical Digest Paper ITu3B.2; Optical Society of America: Washington, DC, USA, 2018. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Group Number | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| −2 | −1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| 1 | 0.250 | 0.500 | 1.00 | 2.00 | 4.00 | 8.00 | 16.00 | 32.0 | 64.0 | 128.0 |
| 2 | 0.280 | 0.561 | 1.12 | 2.24 | 4.49 | 8.98 | 17.95 | 36.0 | 71.8 | 144.0 |
| 3 | 0.315 | 0.630 | 1.26 | 2.52 | 5.04 | 10.10 | 20.16 | 40.3 | 80.6 | 161.0 |
| 4 | 0.353 | 0.707 | 1.41 | 2.83 | 5.66 | 11.30 | 22.62 | 45.3 | 90.5 | 181.0 |
| 5 | 0.397 | 0.793 | 1.59 | 3.17 | 6.35 | 12.70 | 25.39 | 50.8 | 102.0 | 203.0 |
| 6 | 0.445 | 0.891 | 1.78 | 3.56 | 7.13 | 14.30 | 28.50 | 57.0 | 114.0 | 228.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamato, K.; Yamashita, T.; Chiba, H.; Oku, H. Fast Volumetric Feedback under Microscope by Temporally Coded Exposure Camera. Sensors 2019, 19, 1606. https://doi.org/10.3390/s19071606
Yamato K, Yamashita T, Chiba H, Oku H. Fast Volumetric Feedback under Microscope by Temporally Coded Exposure Camera. Sensors. 2019; 19(7):1606. https://doi.org/10.3390/s19071606
Chicago/Turabian StyleYamato, Kazuki, Toshihiko Yamashita, Hiroyuki Chiba, and Hiromasa Oku. 2019. "Fast Volumetric Feedback under Microscope by Temporally Coded Exposure Camera" Sensors 19, no. 7: 1606. https://doi.org/10.3390/s19071606
APA StyleYamato, K., Yamashita, T., Chiba, H., & Oku, H. (2019). Fast Volumetric Feedback under Microscope by Temporally Coded Exposure Camera. Sensors, 19(7), 1606. https://doi.org/10.3390/s19071606