A Method for Detecting Atmospheric Lagrangian Coherent Structures Using a Single Fixed-Wing Unmanned Aircraft System



Abstract
1. Introduction
2. Methods
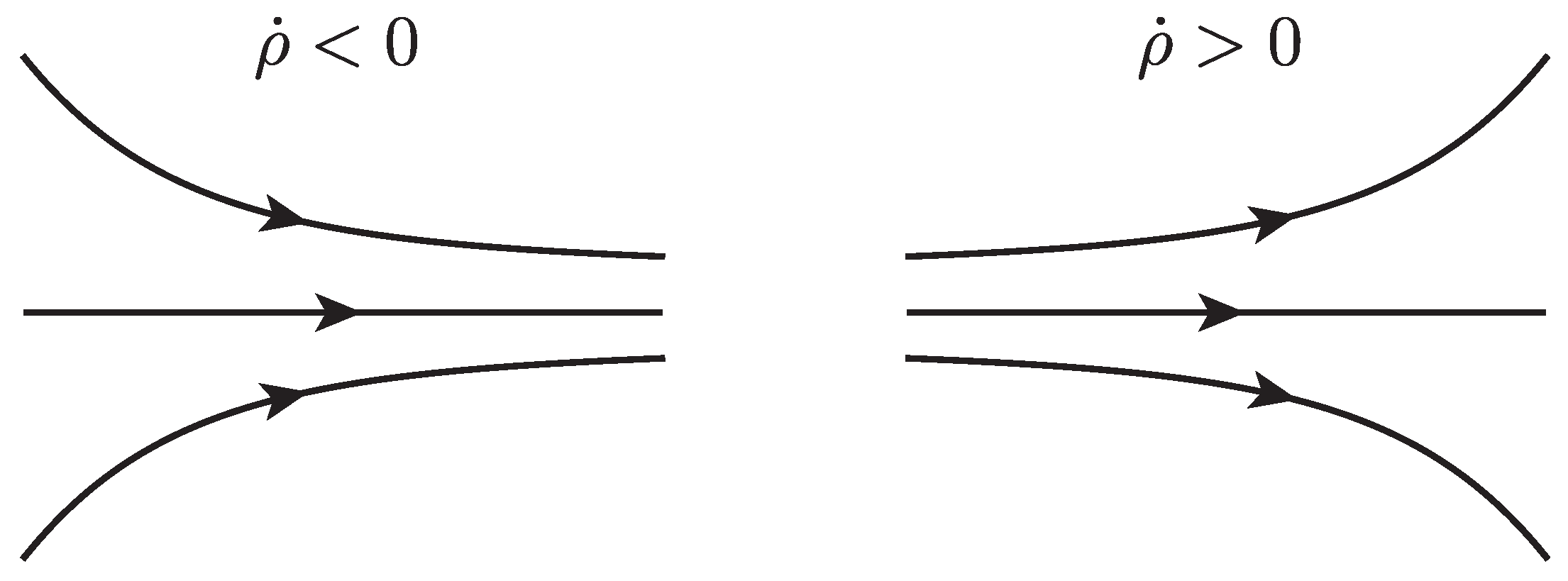
2.1. Lagrangian-Eulerian Analysis
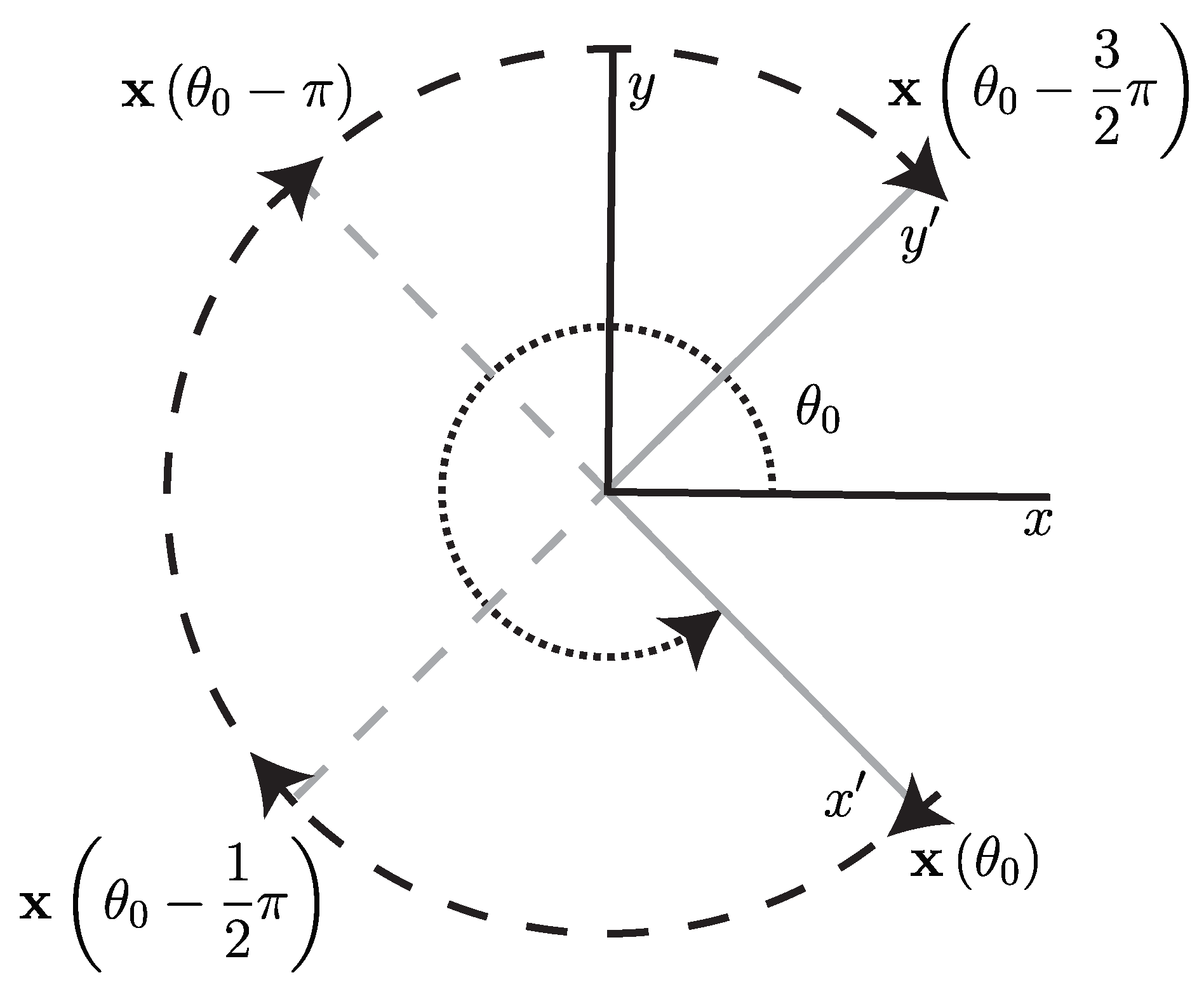
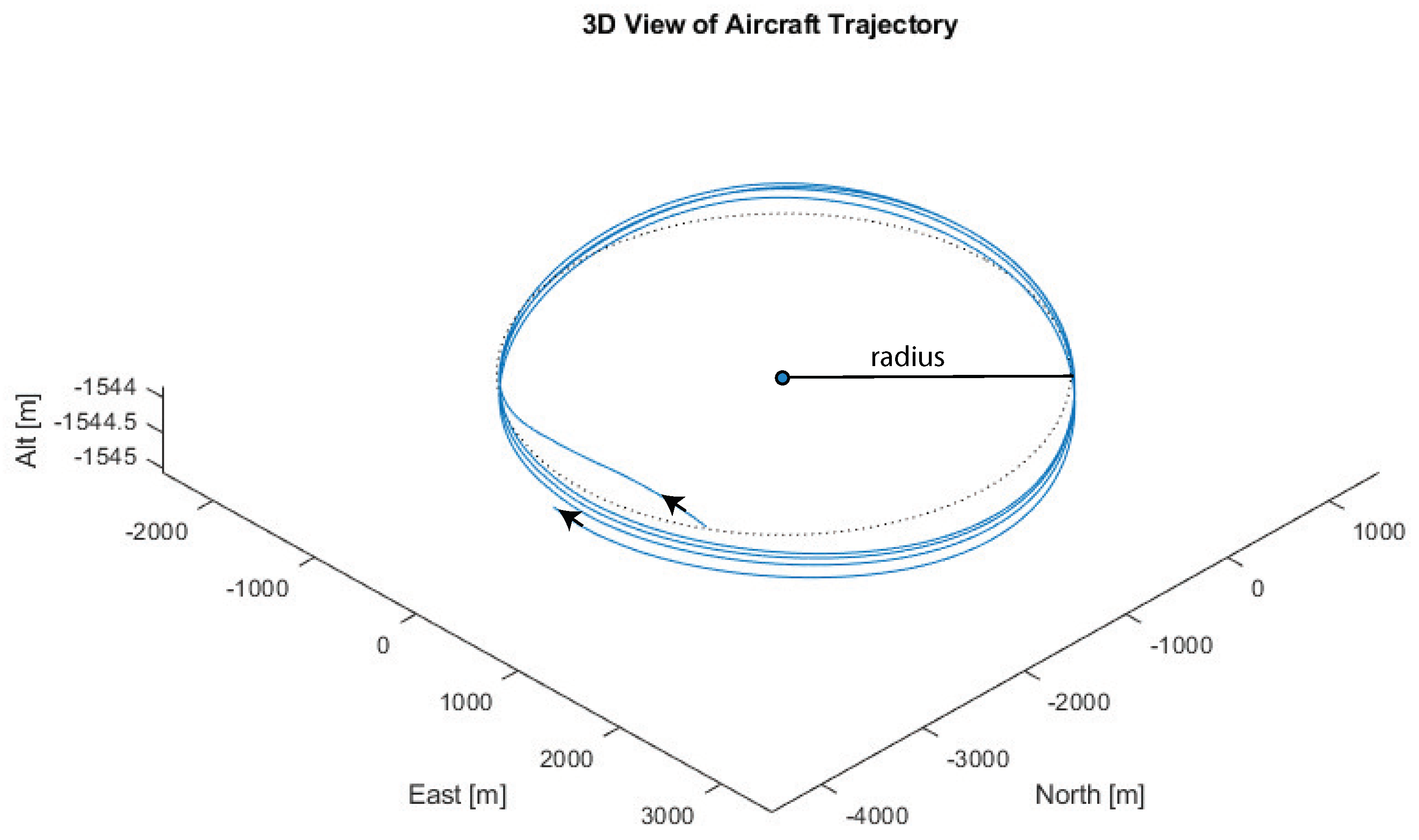
2.2. Gradient Approximation from UAS Flight
- A scalar field measured along a circular arc, , as an array input, where n is the number of measurements taken;
- The angle as a monotonically decreasing array input;
- And the radius of the circular arc, r, which is assumed to be constant, as a scalar input.
| Algorithm 1 Circle Gradient approximates the gradient of a scalar from samples along an arc |
 |
2.3. Model Data
3. Results
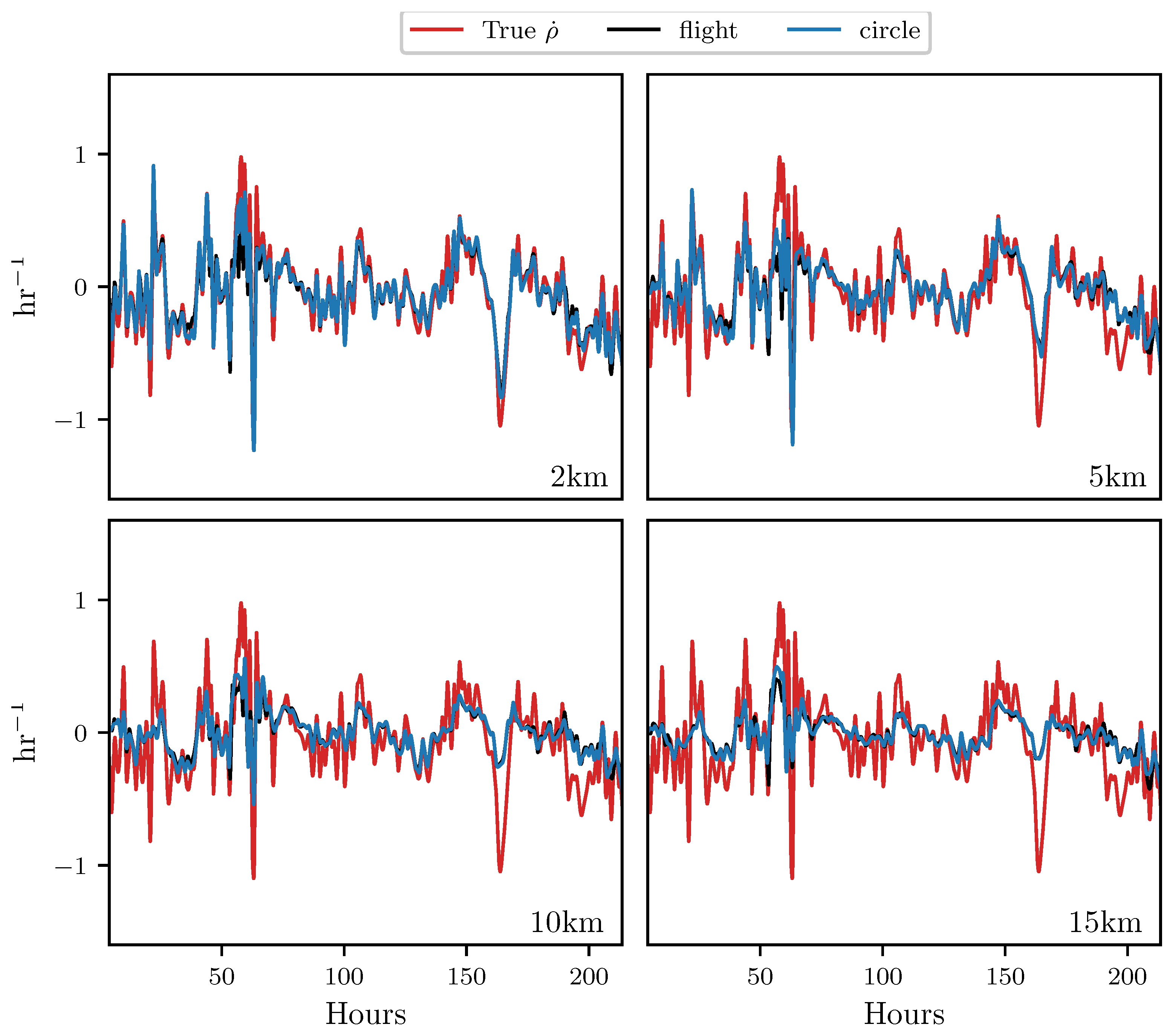
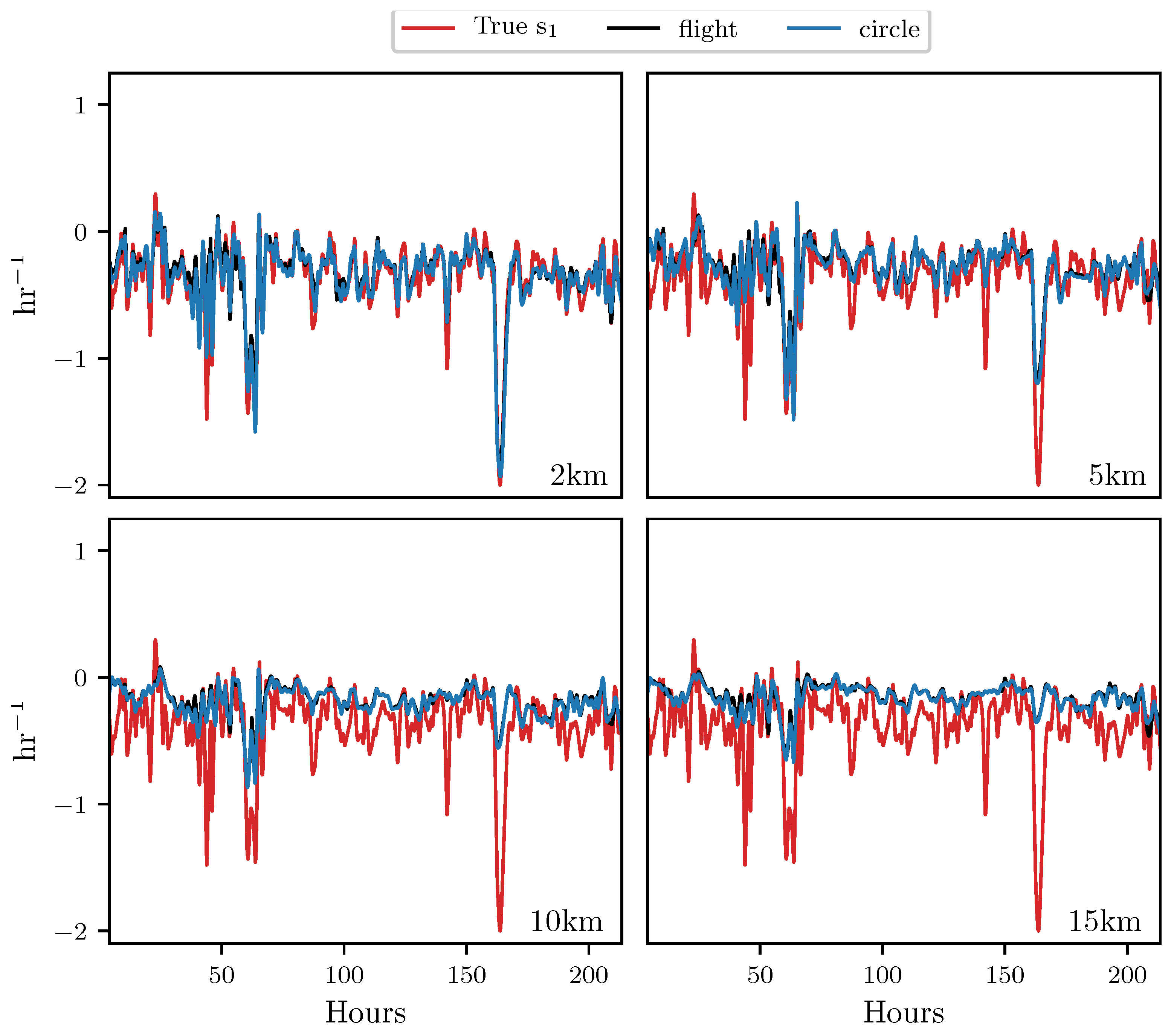
3.1. Approximating Local Eulerian Metrics from UAS Flights
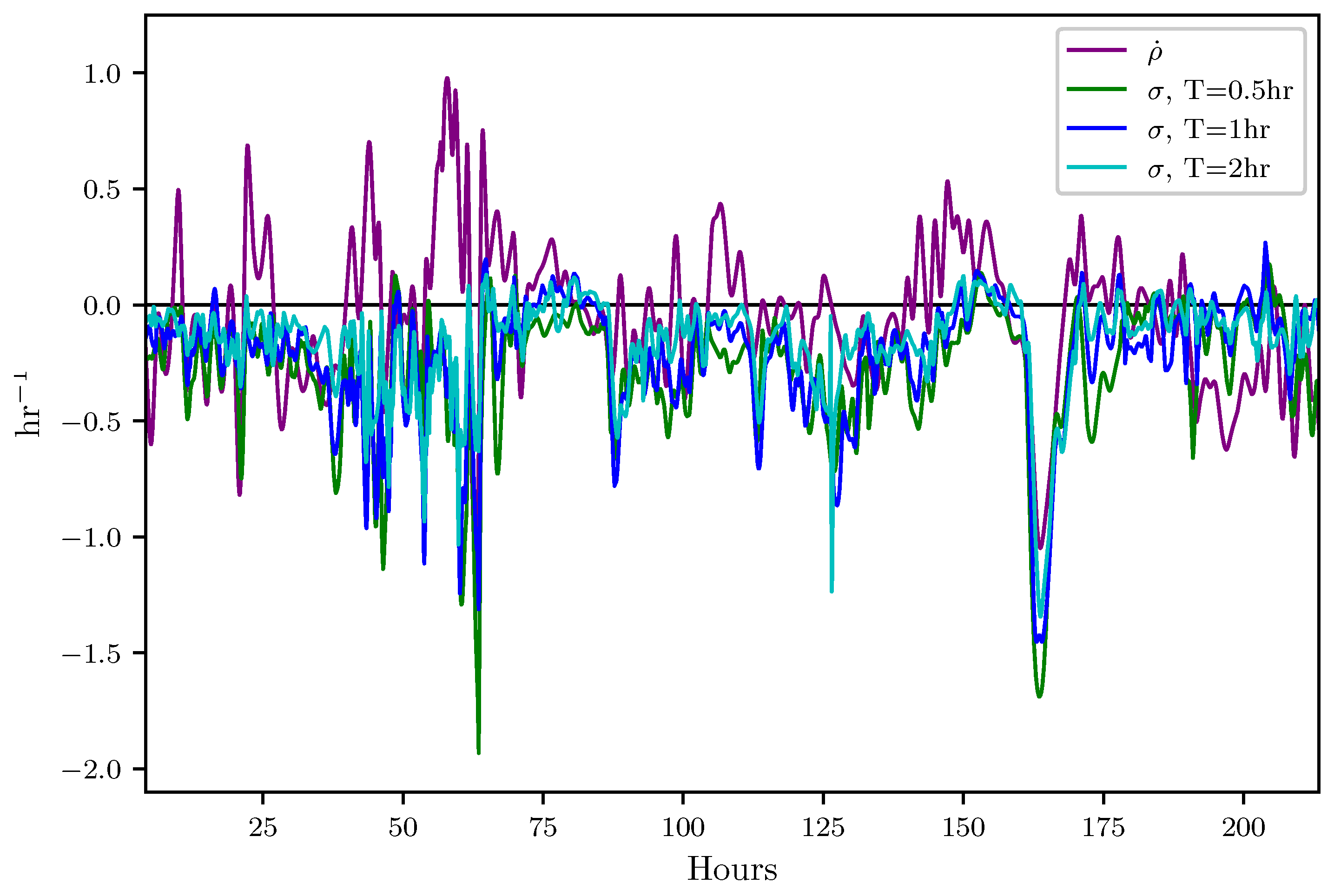
3.2. Using Eulerian Metrics to Infer Lagrangian Dynamics
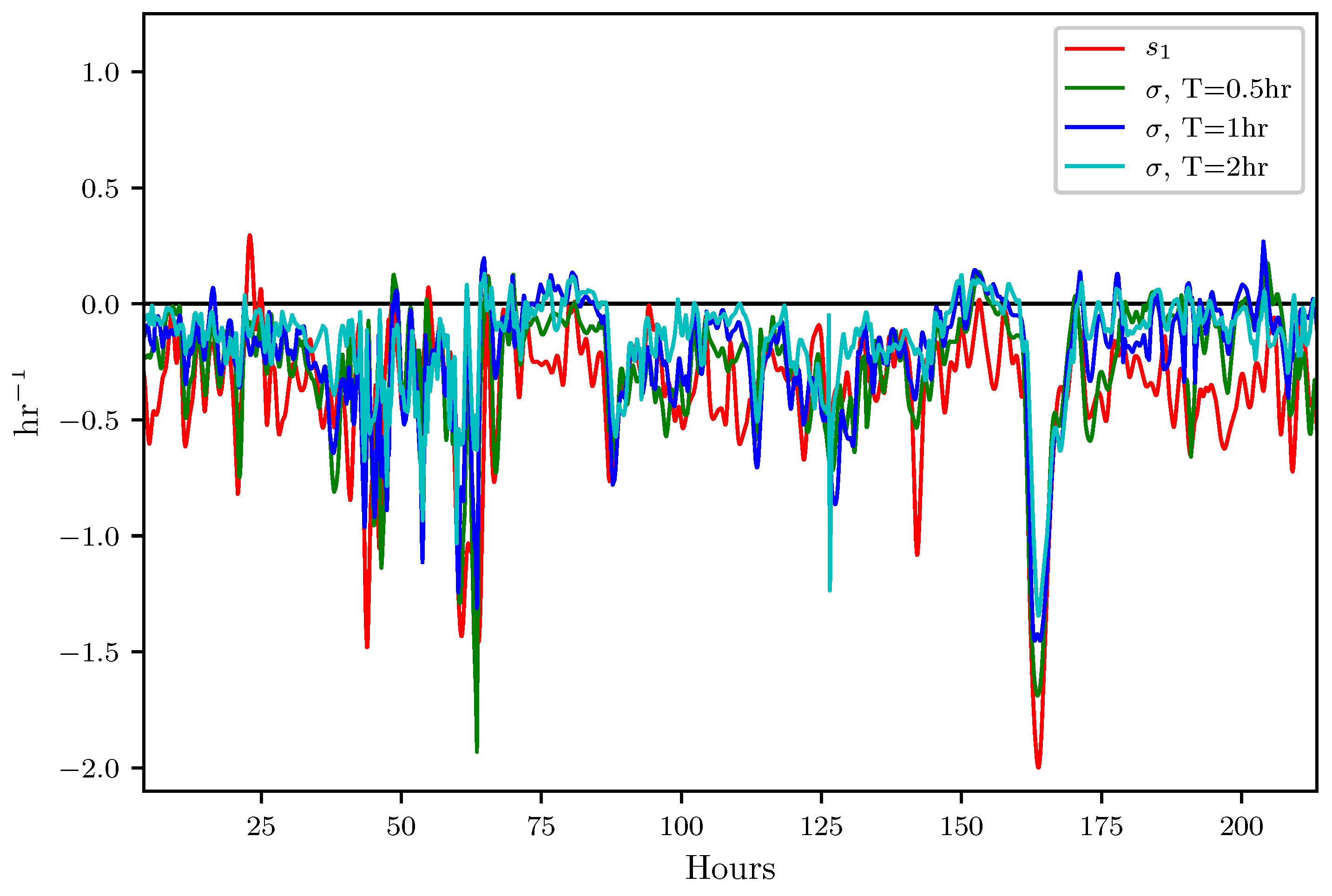
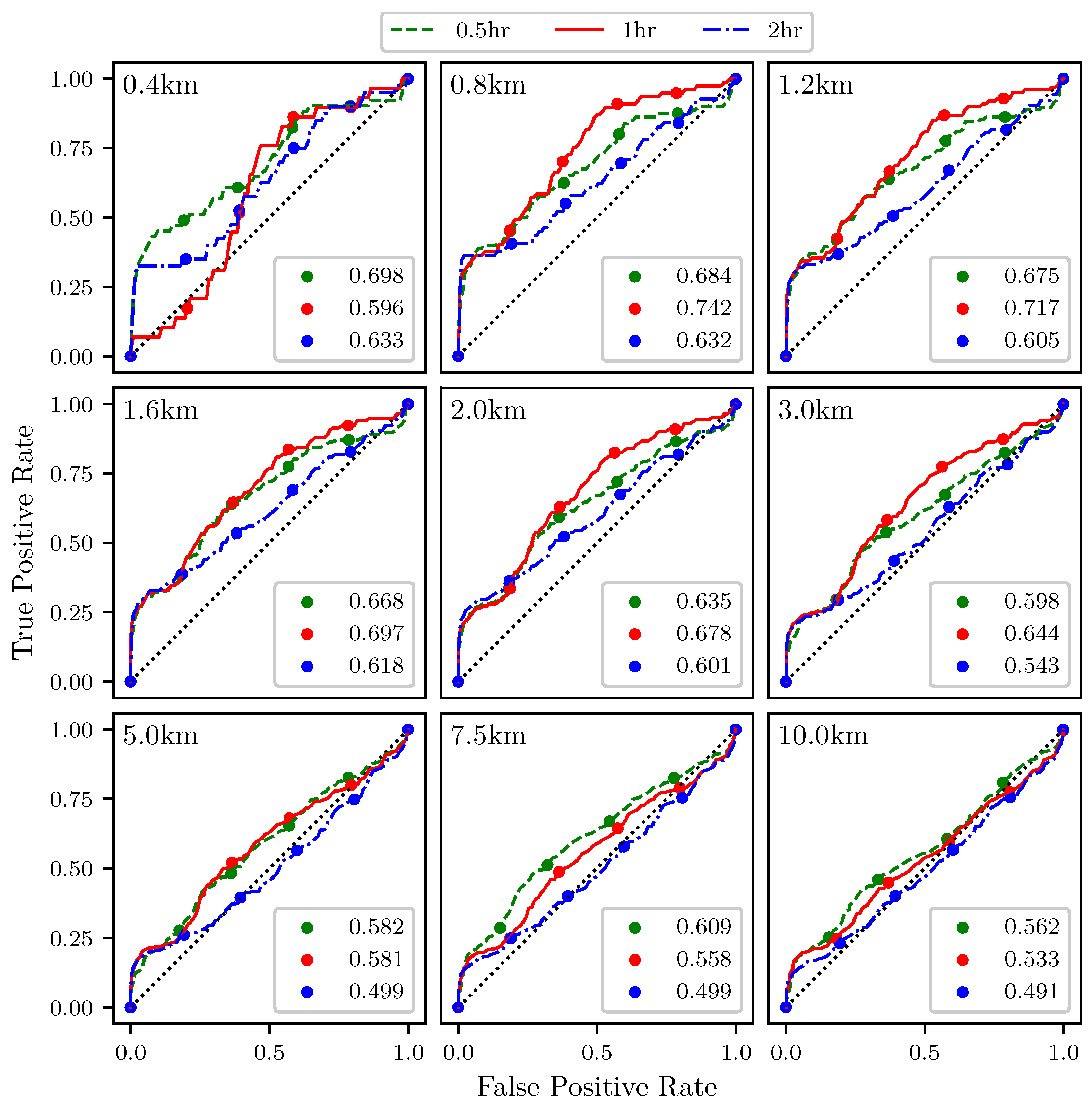
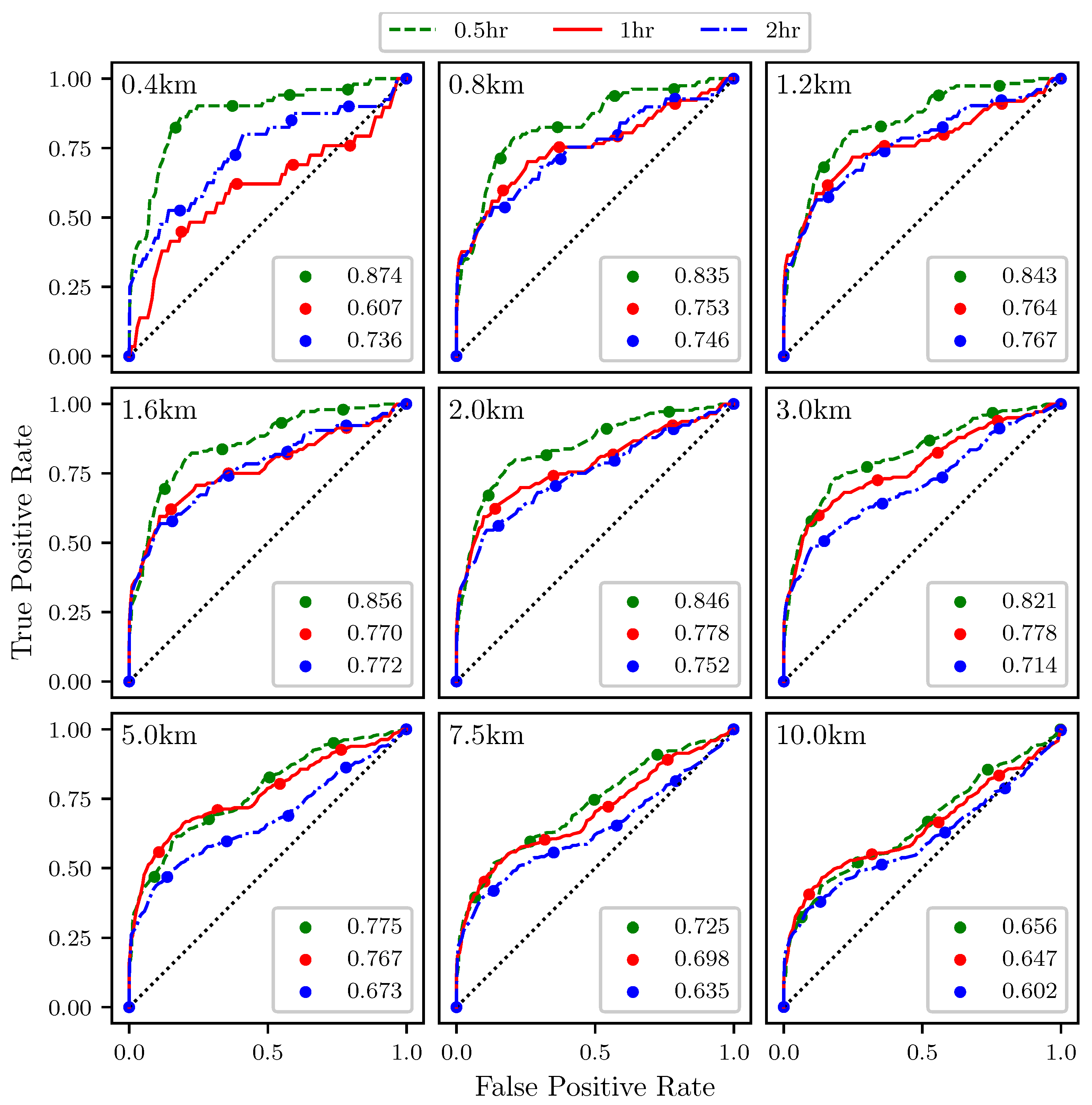
3.3. Inferring Lagrangian Dynamics from UAS Measurements
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| UAS | Unmanned aircraft systems |
| ASL | Above sea level |
| AUC | Area under the curve |
| FTLE | Finite-time Lyapunov exponent |
| LCS | Lagrangian coherent structure |
| iLCS | Infinitesimal-time LCS |
| OECS | Objective Eulerian coherent structure |
| WRF | Weather research and forecasting |
| NAM | North American Mesoscale model |
| OSSE | Observing system simulation experiment |
| ROC | Receiver Operating Characteristic |
Appendix A. Flight Dynamic Model
- Earth is a flat, inertial reference.
- The aircraft is a rigid body, symmetric about its longitudinal plane, with constant mass m.
- For wind-aircraft interaction, the aircraft is a point “located” at it’s center-of-mass.
- The wind is described by a -smooth kinematic vector field.
- Aircraft thrust is an instantaneously-controllable force acting nose-forward from the center-of-mass.
- All parameters are invariant with altitude. (e.g., no altitudinal variation of density , gravity g, ground-effect, etc.)
References
- Tallapragada, P.; Ross, S.D.; Schmale, D.G. Lagrangian Coherent Structures Are Associated with Fluctuations in Airborne Microbial Populations. Chaos 2011, 21, 033122. [Google Scholar] [CrossRef] [PubMed]
- Schmale, D.; Ross, S. Highways in the Sky: Scales of Atmospheric Transport of Plant Pathogens. Annu. Rev. Phytopathol. 2015, 53, 591–611. [Google Scholar] [CrossRef] [PubMed]
- Schmale, D.G.; Ross, S.D. High-flying microbes: Aerial drones and chaos theory help researchers explore the many ways that microorganisms spread havoc around the world. Sci. Am. 2017, 2, 32–37. [Google Scholar]
- BozorgMagham, A.E.; Ross, S.D.; Schmale, D.G., III. Local finite-time Lyapunov exponent, local sampling and probabilistic source and destination regions. Nonlinear Process. Geophys. 2015, 22, 663–677. [Google Scholar] [CrossRef]
- Peng, J.; Peterson, R. Attracting structures in volcanic ash transport. Atmos. Environ. 2012, 48, 230–239. [Google Scholar] [CrossRef]
- Tang, W.; Chan, P.W.; Haller, G. Lagrangian coherent structure analysis of terminal winds detected by lidar. Part I: Turbulence structures. J. Appl. Meteorol. Climatol. 2011, 50, 325–338. [Google Scholar] [CrossRef]
- Kampa, M.; Castanas, E. Human health effects of air pollution. Environ. Pollut. 2008, 151, 362–367. [Google Scholar] [CrossRef] [PubMed]
- Pope, C., III; Burnett, R.T.; Thun, M.J.; Calle, E.E.; Krewski, D.; Ito, K.; Thurston, G.D. Lung cancer, cardiopulmonary mortality, and long-term exposure to fine particulate air pollution. JAMA 2002, 287, 1132–1141. [Google Scholar] [CrossRef] [PubMed]
- BozorgMagham, A.E.; Ross, S.D. Atmospheric Lagrangian coherent structures considering unresolved turbulence and forecast uncertainty. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 964–979. [Google Scholar] [CrossRef]
- Senatore, C.; Ross, S.D. Detection and characterization of transport barriers in complex flows via ridge extraction of the finite time Lyapunov exponent field. Int. J. Numer. Methods Eng. 2011, 86, 1163–1174. [Google Scholar] [CrossRef]
- Curbelo, J.; García-Garrido, V.J.; Mechoso, C.R.; Mancho, A.M.; Wiggins, S.; Niang, C. Insights into the three-dimensional Lagrangian geometry of the Antarctic polar vortex. Nonlinear Process. Geophys. 2017, 24, 379. [Google Scholar] [CrossRef]
- Garaboa-Paz, D.; Eiras-Barca, J.; Huhn, F.; Pérez-Muñuzuri, V. Lagrangian coherent structures along atmospheric rivers. Chaos Interdiscip. J. Nonlinear Sci. 2015, 25, 063105. [Google Scholar] [CrossRef]
- Knutson, B.; Tang, W.; Chan, P.W. Lagrangian coherent structure analysis of terminal winds: Three-dimensionality, intramodel variations, and flight analyses. Adv. Meteorol. 2015, 2015. [Google Scholar] [CrossRef]
- González-Rocha, J.; Woolsey, C.A.; Sultan, C.; De Wekker, S.F. Sensing Wind from Quadrotor Motion. J. Guid. Control Dyn. 2018. [Google Scholar] [CrossRef]
- Nolan, P.; Pinto, J.; González-Rocha, J.; Jensen, A.; Vezzi, C.; Bailey, S.; de Boer, G.; Diehl, C.; Laurence, R.; Powers, C.; et al. Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs). Sensors 2018, 18, 4448. [Google Scholar] [CrossRef]
- Serra, M.; Haller, G. Objective Eulerian coherent structures. Chaos: Interdiscip. J. Nonlinear Sci. 2016, 26, 053110. [Google Scholar] [CrossRef]
- Nave, G.K., Jr.; Nolan, P.J.; Ross, S.D. Trajectory-free approximation of phase space structures using the trajectory divergence rate. Nonlinear Dyn. 2019. [Google Scholar] [CrossRef]
- Axford, D.N. On the Accuracy of Wind Measurements Using an Inertial Platform in an Aircraft, and an Example of a Measurement of the Vertical Mesostructure of the Atmosphere. J. Appl. Meteorol. Climatol. 1968, 7, 645–666. [Google Scholar] [CrossRef]
- Lenschow, D.H.; Spyers-Duran, P. Measurement Techniques: Air Motion Sensing; Technical Report 23; National Center for Atmospheric Research: Boulder, CO, USA, 1989. [Google Scholar]
- NASA. Airborne Science Program Website. Available online: https://airbornescience.nasa.gov/ (accessed on 31 January 2017).
- Elston, J.; Argrow, B.; Stachura, M.; Weibel, D.; Lawrence, D.; Pope, D. Overview of Small Fixed-Wing Unmanned Aircraft for Meteorological Sampling. J. Atmos. Ocean. Technol. 2015, 32, 97–115. [Google Scholar] [CrossRef]
- Borup, K.T.; Fossen, T.I.; Johansen, T.A. A Nonlinear Model-Based Wind Velocity Observer for Unmanned Aerial Vehicles. In Proceedings of the 10th IFAC Symposium on Nonlinear Control Systems, Monterey, CA, USA, 23–25 August 2016. [Google Scholar]
- Rhudy, M.B.; Gu, Y.; Gross, J.N.; Chao, H. Onboard Wind Velocity Estimation Comparison for Unmanned Aircraft Systems. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 55–66. [Google Scholar] [CrossRef]
- Lie, F.A.P.; Gebre-Egziabher, D. Synthetic Air Data System. J. Aircr. 2013, 50, 1234–1249. [Google Scholar] [CrossRef]
- Langelaan, J.W.; Alley, N.; Neidhoefer, J. Wind Field Estimation for Small Unmanned aerial Vehicles. J. Guid. Control Dyn. 2011, 34, 1016–1030. [Google Scholar] [CrossRef]
- Witte, B.M.; Singler, R.F.; Bailey, S.C. Development of an Unmanned Aerial Vehicle for the Measurement of Turbulence in the Atmospheric Boundary Layer. Atmosphere 2017, 8, 195. [Google Scholar] [CrossRef]
- Wenz, A.; Johansen, T.A. Estimation of Wind Velocities and Aerodynamic Coefficients for UAVs using Standard Autopilot Sensors and a Moving Horizon Estimator. In Proceedings of the IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1267–1276. [Google Scholar]
- Peikert, R.; Schindler, B.; Carnecky, R. Ridge surface methods for the visualization of Lagrangian coherent structures. In Proceedings of the 9th International Conference on Flow Dynamics, Sendai, Japan, 19–21 September 2012; pp. 206–207. [Google Scholar]
- Nolan, P.J.; Ross, S.D. Finite-time Lyapunov exponent field in the infinitesimal time limit. viXra 2018. viXra:1810.0023. [Google Scholar]
- BozorgMagham, A.E.; Ross, S.D.; Schmale, D.G., III. Real-time prediction of atmospheric Lagrangian coherent structures based on forecast data: An application and error analysis. Phys. D Nonlinear Phenom. 2013, 258, 47–60. [Google Scholar] [CrossRef]
- North American Mesoscale Model. Available online: https://www.emc.ncep.noaa.gov/NAM/.php. (accessed on 18 January 2019).
- Fact Sheet – Small Unmanned Aircraft Regulations (Part 107). Available online: https://www.faa.gov/news/fact_sheets/news_story.cfm?newsId=22615. (accessed on 8 March 2019).
- Grauer, J.A.; Morelli, E.A. Generic Global Aerodynamic Model for Aircraft. J. Aircr. 2015, 52, 13–21. [Google Scholar] [CrossRef]
- Shadden, S.C.; Lekien, F.; Marsden, J.E. Definition and properties of Lagrangian coherent structures from finite-time Lyapunov exponents in two-dimensional aperiodic flows. Phys. D Nonlinear Phenom. 2005, 212, 271–304. [Google Scholar] [CrossRef]
- Rypina, I.; Brown, M.; Beron-Vera, F.; Kocak, H.; Olascoaga, M.; Udovydchenkov, I. On the Lagrangian dynamics of atmospheric zonal jets and the permeability of the stratospheric polar vortex. J. Atmos. Sci. 2007, 64, 3595–3610. [Google Scholar] [CrossRef]
- Nolan, P.J.; Foroutan, H.; Ross, S.D. The Understanding of Pollutant Transport in the Atmosphere: Lagrangian Coherent Structures. Poster Presented by Hosein Foroutan at the 17th Annual CMAS Conference. 2018. Available online: https://cmascenter.org/conference//2018/slides/foroutan_understanding_pollutant_2018.pdf (accessed on 3 March 2019).
- Etkin, B. Dynamics of Atmospheric Flight; John Wiley & Sons: New York, NY, USA, 1972. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2 km Circle | 5 km Circle | 10 km Circle | 15 km Circle | 2 km Flight | 5 km Flight | 10 km Flight | 15 km Flight | |
|---|---|---|---|---|---|---|---|---|
| center point | 0.955 | 0.854 | 0.790 | 0.730 | 0.931 | 0.827 | 0.781 | 0.730 |
| 2 km circle | -- | 0.946 | 0.815 | 0.751 | 0.981 | 0.923 | 0.811 | 0.765 |
| 5 km circle | -- | 0.866 | 0.768 | 0.935 | 0.981 | 0.865 | 0.784 | |
| 10 km circle | -- | 0.928 | 0.804 | 0.836 | 0.974 | 0.902 | ||
| 15 km circle | -- | 0.745 | 0.738 | 0.904 | 0.955 | |||
| 2 km flight | -- | 0.944 | 0.824 | 0.783 | ||||
| 5 km flight | -- | 0.870 | 0.793 | |||||
| 10 km flight | -- | 0.937 |
| 2 km Circle | 5 km Circle | 10 km Circle | 15 km Circle | 2 km Flight | 5 km Flight | 10 km Flight | 15 km Flight | |
|---|---|---|---|---|---|---|---|---|
| center point | 0.939 | 0.838 | 0.677 | 0.590 | 0.910 | 0.821 | 0.675 | 0.577 |
| 2 km circle | -- | 0.932 | 0.742 | 0.644 | 0.980 | 0.917 | 0.739 | 0.627 |
| 5 km circle | -- | 0.898 | 0.789 | 0.916 | 0.980 | 0.887 | 0.760 | |
| 10 km circle | -- | 0.908 | 0.729 | 0.881 | 0.978 | 0.864 | ||
| 15 km circle | -- | 0.637 | 0.788 | 0.907 | 0.965 | |||
| 2 km flight | -- | 0.936 | 0.746 | 0.644 | ||||
| 5 km flight | -- | 0.900 | 0.791 | |||||
| 10 km flight | -- | 0.909 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nolan, P.J.; McClelland, H.G.; Woolsey, C.A.; Ross, S.D. A Method for Detecting Atmospheric Lagrangian Coherent Structures Using a Single Fixed-Wing Unmanned Aircraft System. Sensors 2019, 19, 1607. https://doi.org/10.3390/s19071607
Nolan PJ, McClelland HG, Woolsey CA, Ross SD. A Method for Detecting Atmospheric Lagrangian Coherent Structures Using a Single Fixed-Wing Unmanned Aircraft System. Sensors. 2019; 19(7):1607. https://doi.org/10.3390/s19071607
Chicago/Turabian StyleNolan, Peter J., Hunter G. McClelland, Craig A. Woolsey, and Shane D. Ross. 2019. "A Method for Detecting Atmospheric Lagrangian Coherent Structures Using a Single Fixed-Wing Unmanned Aircraft System" Sensors 19, no. 7: 1607. https://doi.org/10.3390/s19071607
APA StyleNolan, P. J., McClelland, H. G., Woolsey, C. A., & Ross, S. D. (2019). A Method for Detecting Atmospheric Lagrangian Coherent Structures Using a Single Fixed-Wing Unmanned Aircraft System. Sensors, 19(7), 1607. https://doi.org/10.3390/s19071607