An Optical MEMS Acoustic Sensor Based on Grating Interferometer

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
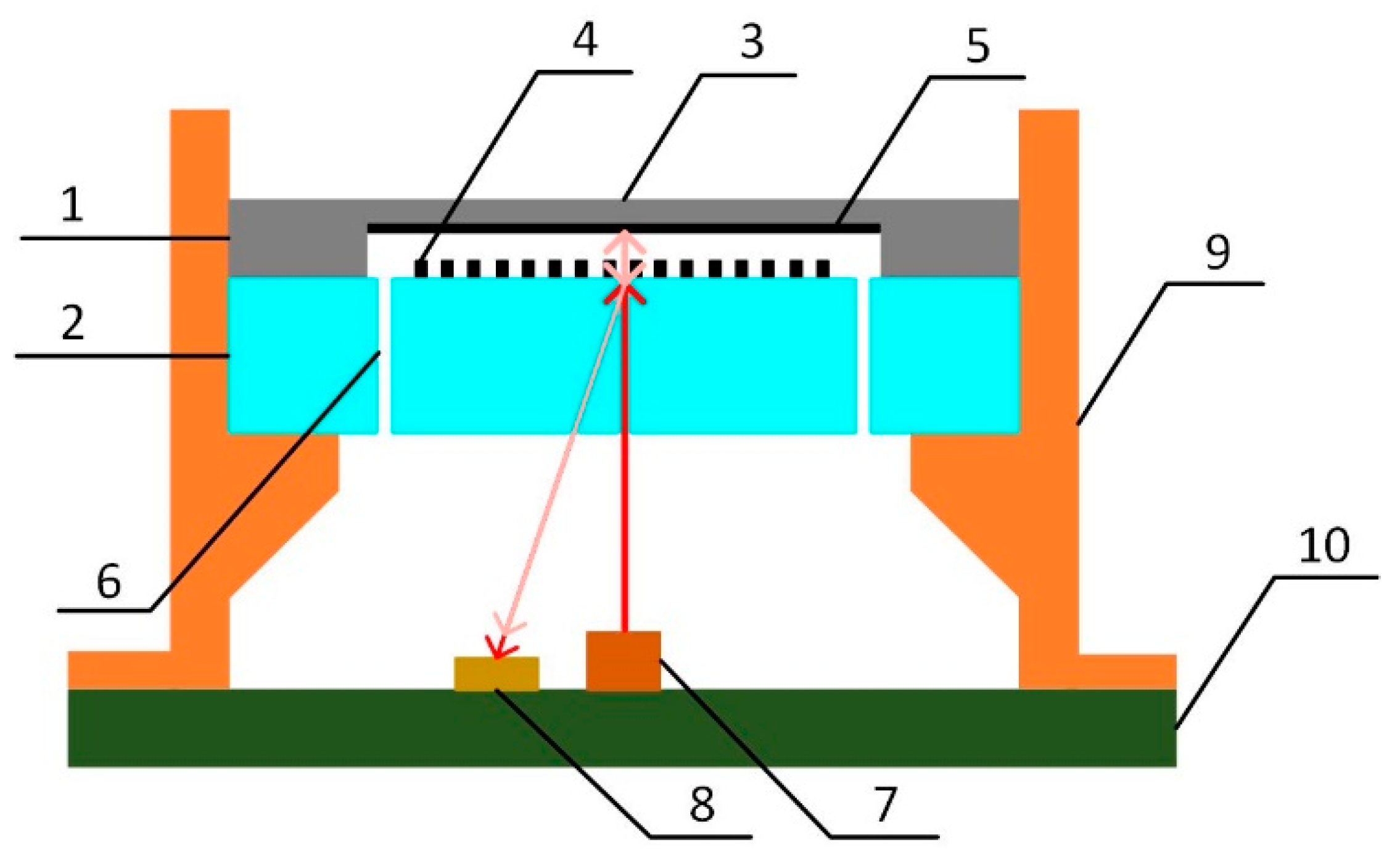
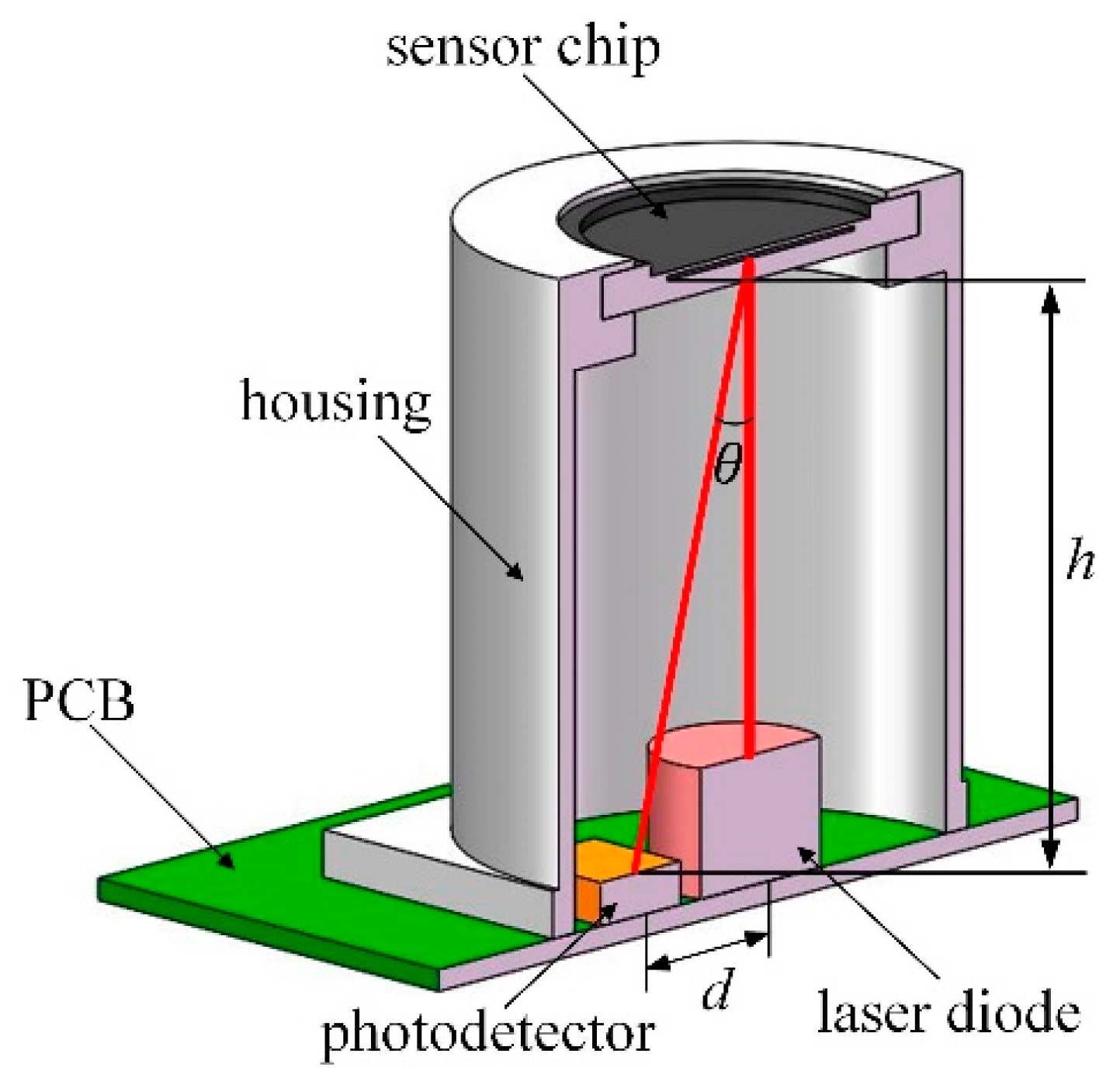
2.1. The acoustic sensor design
2.2. The MEMS sensor chip fabrication
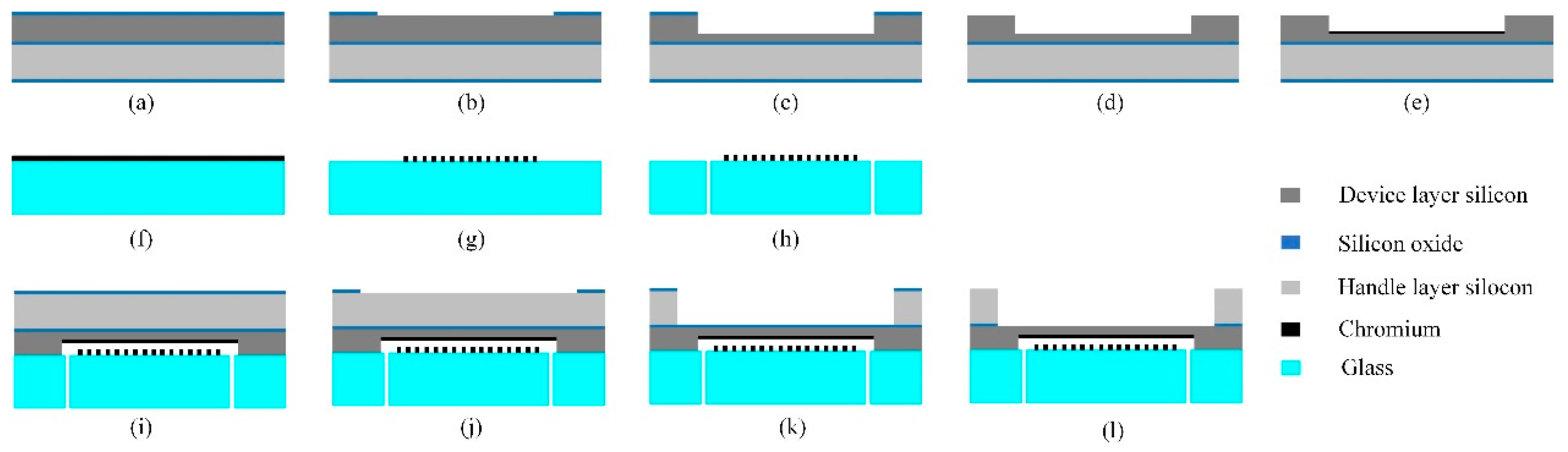
- (a)
- Silicon oxide films 500 nm in thickness were deposited on both surfaces of the SOI substrate by thermal oxidation.
- (b)
- On the device layer, the silicon oxide film in the cavity area was etched by reactive ion etching (RIE).
- (c)
- With the silicon oxide film as the mask, silicon in the device layer was etched by the wet method for the cavity.
- (d)
- The remaining silicon oxide film on the device layer was removed by RIE.
- (e)
- A 50 nm chromium film for the reflective layer was sputtered on the device layer and patterned.
- (f)
- A 50 nm chromium film for the grating was sputtered on the glass substrate.
- (g)
- The chromium film was patterned by ion beam etching (IBE).
- (h)
- Through holes were made in the glass substrate by laser cutting.
- (i)
- The two wafers were assembled by anodic bonding.
- (j)
- On the handle layer of the SOI substrate, the silicon oxide film in the diaphragm area was etched by RIE.
- (k)
- The silicon of the handle layer in the diaphragm area was etched by deep reactive ion etching (DRIE) until it reached the buried oxide layer.
- (l)
- The exposed silicon oxide film was etched by RIE.
2.3. The Methods
3. Results and Discussion
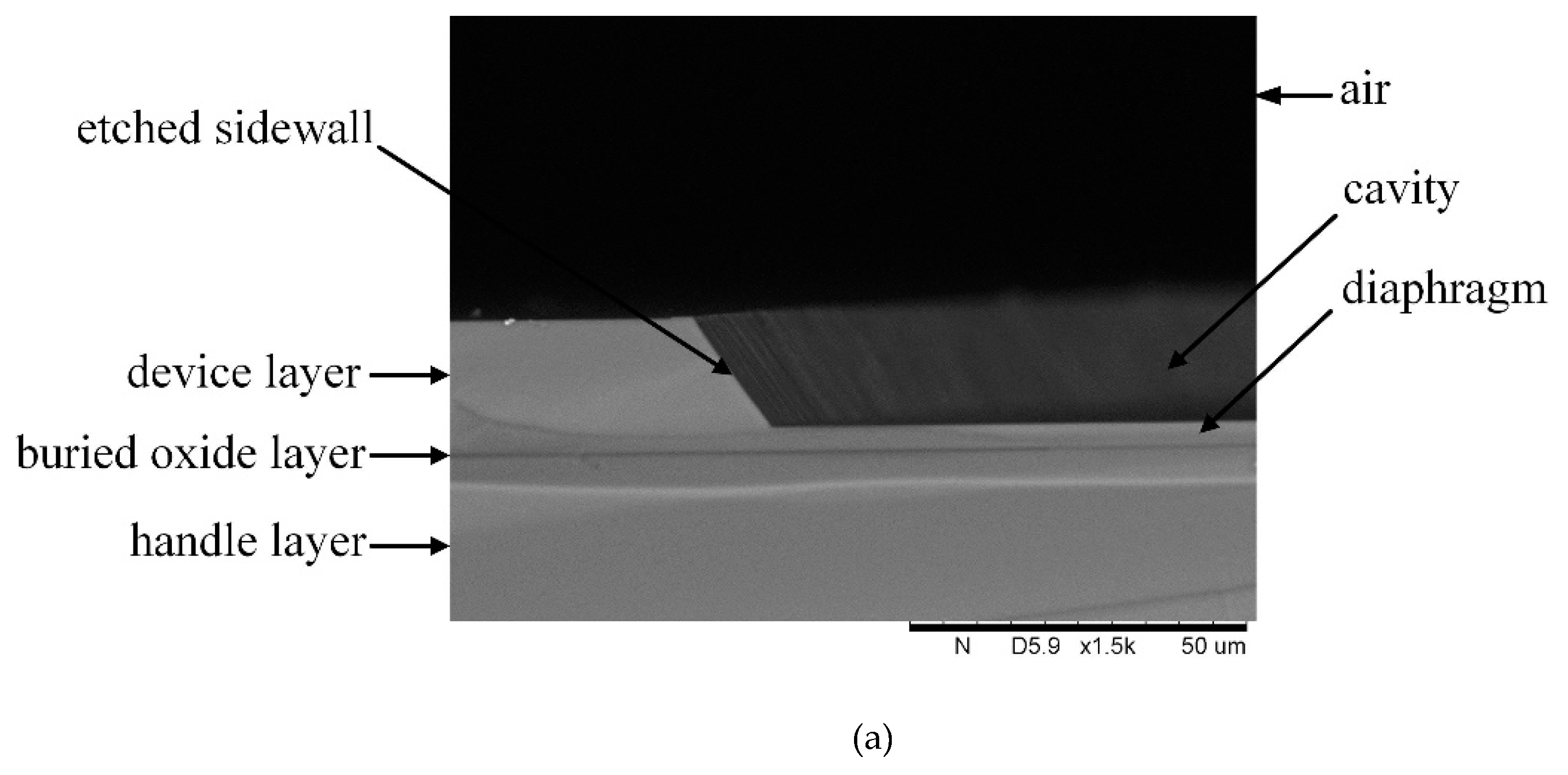
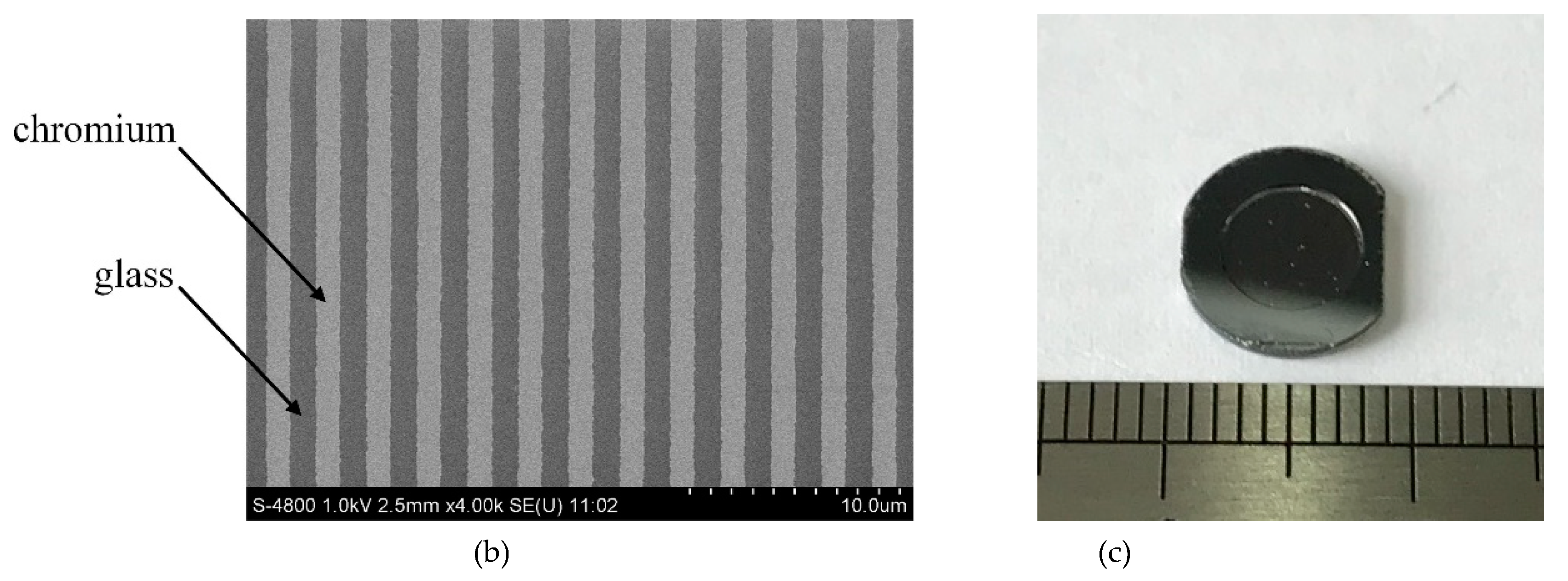
3.1. The MEMS Sensor Chip
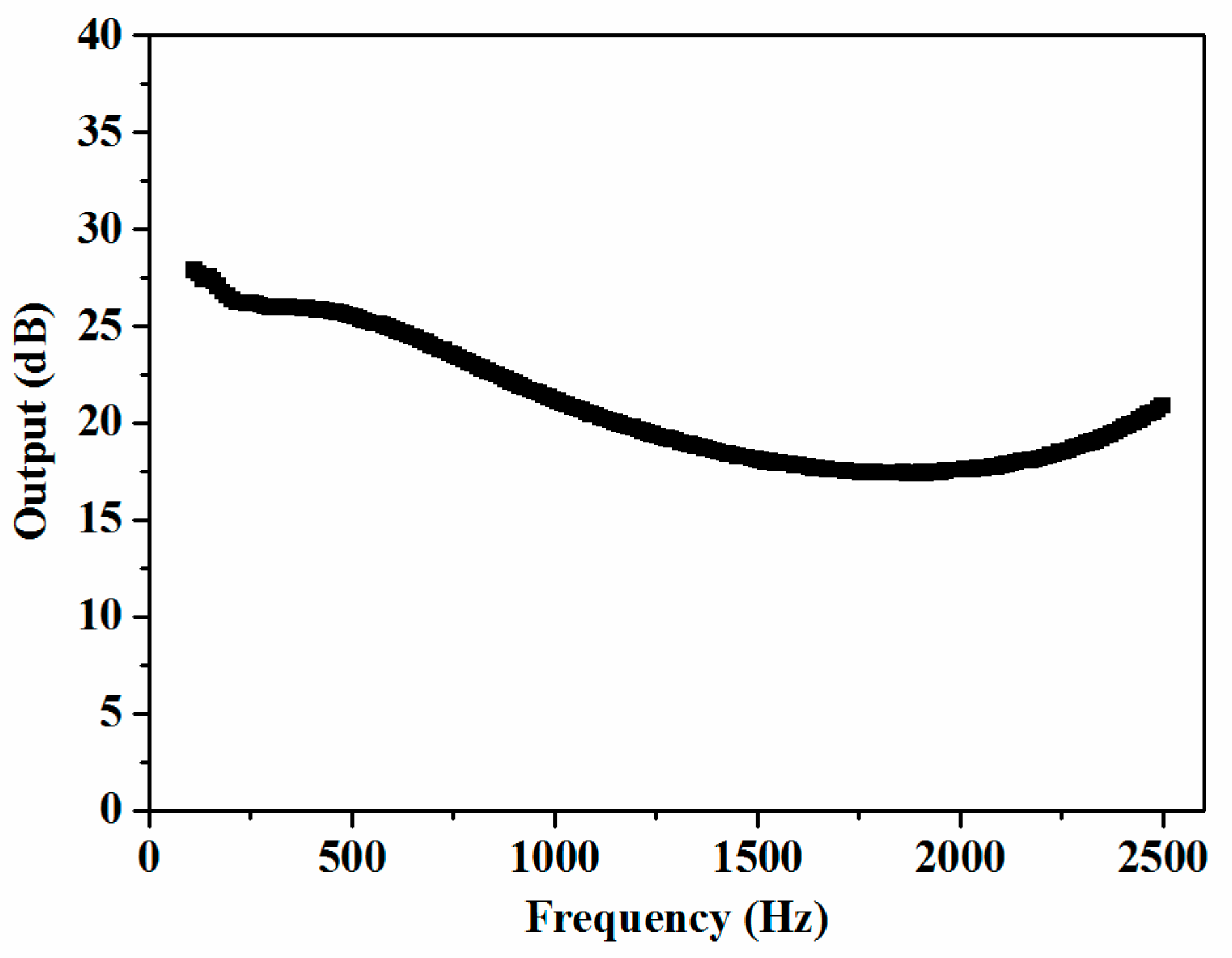
3.2. Response to Acoustic Signal
3.3. Stability of the Sensor
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fu, T.; Wei, P.; Han, X.L.; Liu, Q.B. Application of fiber Bragg grating acoustic emission sensors in thin polymer-bonded explosives. Sensors 2018, 18, 3778. [Google Scholar] [CrossRef] [PubMed]
- Lyu, C.; Wu, C.; Tam, H.Y.; Lu, C.; Ma, J.G. Polarimetric heterodyning fiber laser sensor for directional acoustic signal measurement. Opt. Express 2013, 21, 018273. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.; Shi, J.H.; Gong, K.; Li, H.F.; Hui, R.Q.; Yu, B.L. Fiber-optic acoustic pressure sensor based on large-area nanolayer silver diaghragm. Opt. Lett. 2014, 39, 2838–2840. [Google Scholar] [CrossRef]
- Islam, M.R.; Ali, M.M.; Lai, M.H. Chronology of Fabry-Perot interferometer fiber-optic sensors and their applications: A review. Sensors 2014, 14, 7451–7488. [Google Scholar] [CrossRef]
- Yu, C.B.; Wu, Y.; Wu, F.; Li, C.; Zhou, J.H.; Rao, Y.J.; Chen, Y.F. Highly sensitive fiber-optic Fabry-Perot geophone with graphene-coated PMMA membrane. In Proceedings of the 25th International Conference on Optical Fiber Sensors, Jeju Island, Korea, 24–28 April 2017. [Google Scholar]
- Liu, B.; Lin, J.; Liu, H.; Ma, Y.; Yan, L.; Jin, P. Diaphragm based long cavity Fabry-Perot fiber acoustic sensor using phase generated carrier. Opt. Commun. 2017, 382, 514–518. [Google Scholar] [CrossRef]
- Lan, C.M.; Zhou, W.S.; Xie, Y.W. Detection of ultrasonic stress waves in structures using 3D shaped optic fiber based on a Mach-Zehnder interferometer. Sensors 2018, 18, 1218. [Google Scholar] [CrossRef]
- Wei, P.; Han, X.L.; Xia, D.; Liu, T.L.; Lang, H. Novel fiber-optic ring acoustic emission sensor. Sensors 2018, 18, 215. [Google Scholar]
- Chen, Q.M.; Jin, C.; Bao, Y.; Li, Z.H.; Li, J.Q.; Lu, C.; Yang, L.; Li, G.F. A distributed fiber vibration sensor utilizing dispersion induced walk-off effect in a unidirectional Mach-Zehnder interferometer. Opt. Express 2014, 22, 2167–2173. [Google Scholar] [CrossRef]
- Ma, J.; Yu, Y.Q.; Jin, W. Demodulation of diaphragm based acoustic sensor using Sagnac interferometer with stable phase bias. Opt. Express 2015, 23, 29268–29278. [Google Scholar] [CrossRef] [PubMed]
- Jo, W.; Akkaya, O.C.; Solgaard, O.; Digonnet, M.J.F. Miniature fiber acoustic sensors using a photonic-crystal membrane. Opt. Fiber Technol. 2013, 19, 785–792. [Google Scholar] [CrossRef]
- Liu, H.J.; Currano, L.; Gee, D.; Helms, T.; Yu, M. Understanding and mimicking the dual optimality of the fly ear. Sci. Rep. 2013, 3, 2489. [Google Scholar] [CrossRef]
- Liu, B.; Lin, J.; Liu, H.; Jin, A.; Jin, P. Extrinsic Fabry-Perot fiber acoustic pressure sensor based on large-area silver diaphragm. Microelectron. Eng. 2016, 166, 50–54. [Google Scholar] [CrossRef]
- Wang, W.H.; Wu, N.; Tian, Y.; Wang, X.W.; Niezrecki, C.; Chen, J.L. Optical pressure/acoustic sensor with precise Fabry-Perot cavity length control using angle polished fiber. Opt. Express 2009, 17, 16613–16618. [Google Scholar] [CrossRef]
- Wang, X.; Feng, L.H.; Yao, B.Y.; Ren, X.Y. Sensitivity improvement of grating accelerometer based on differential detection method. Appl. Opt. 2013, 52, 4091–4096. [Google Scholar] [CrossRef]
- Kuntzman, M.L.; Garcia, C.T.; Onaran, A.G.; Avenson, B.; Kirk, K.D.; Hall, N.A. Performance and Modeling of a Fully Packaged Micromachined Optical Microphone. J. Microelectromech. Syst. 2011, 20, 828–833. [Google Scholar] [CrossRef]
- Giannopoulos, A.V.; Choquette, K.D. Position Sensing using Integrated VCSEL and PIN Photodectors. In Proceedings of the 21st Annual Meeting of the IEEE Lasers and Electro-Optics Society, Acapulco, Mexico, 9–13 November 2008; pp. 257–258. [Google Scholar]
- Williams, R.P.; Hord, S.K.; Hall, N.A. Optically read displacement detection using phase-modulated diffraction gratings with reduced zeroth-order reflections. Appl. Phys. Lett. 2017, 110, 151104. [Google Scholar] [CrossRef]
- Zhao, S.S.; Zhang, J.; Hou, C.L.; Bai, J.; Yang, G.G. Optical accelerometer based on grating interferometer with phase modulation technique. Appl. Opt. 2012, 51, 7005–7010. [Google Scholar] [CrossRef] [PubMed]
- Mao, X.F.; Yuan, S.Z.; Zheng, P.C.; Wang, X.F. Stabilized fiber-optic Fabry–Perot acoustic sensor based on improved wavelength tuning technique. J. Lightwave Technol. 2017, 35, 2311–2314. [Google Scholar] [CrossRef]
- Liao, H.; Lu, P.; Liu, L.; Wang, S.; Ni, W.J.; Fu, X.; Liu, D.M.; Zhang, J.S. Phase demodulation of short-cavity Fabry–Perot interferometric acoustic sensors with two wavelengths. IEEE Photonics J. 2017, 9, 7102207. [Google Scholar] [CrossRef]
- Akkaya, O.C.; Kilic, O.; Digonnet, M.J.F.; Kino, G.S.; Solgaard, O. Modeling and Demonstration of Thermally Stable High-Sensitivity Reproducible Acoustic Sensors. J. Microelectromech. Syst. 2012, 21, 1347–1356. [Google Scholar] [CrossRef]
- Cheng, J.; Zhou, Y.; Zou, X.P. Fabry–Perot cavity sensing probe with high thermal stability for an acoustic sensor by structure compensation. Sensors 2018, 18, 3393. [Google Scholar] [CrossRef] [PubMed]
- Jo, W.; Kilic, O.; Digonnet, M.J.F. Highly sensitive Phase-Front-Modulation fiber acoustic sensor. J. Lightwave Technol. 2015, 33, 4377–4383. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Wu, G.; Ren, D.; Gao, R.; Qi, Z.-M.; Liang, X. An Optical MEMS Acoustic Sensor Based on Grating Interferometer. Sensors 2019, 19, 1503. https://doi.org/10.3390/s19071503
Zhang M, Wu G, Ren D, Gao R, Qi Z-M, Liang X. An Optical MEMS Acoustic Sensor Based on Grating Interferometer. Sensors. 2019; 19(7):1503. https://doi.org/10.3390/s19071503
Chicago/Turabian StyleZhang, Mengying, Gaomi Wu, Dipeng Ren, Ran Gao, Zhi-Mei Qi, and Xingdong Liang. 2019. "An Optical MEMS Acoustic Sensor Based on Grating Interferometer" Sensors 19, no. 7: 1503. https://doi.org/10.3390/s19071503
APA StyleZhang, M., Wu, G., Ren, D., Gao, R., Qi, Z.-M., & Liang, X. (2019). An Optical MEMS Acoustic Sensor Based on Grating Interferometer. Sensors, 19(7), 1503. https://doi.org/10.3390/s19071503