RGB-D SLAM with Manhattan Frame Estimation Using Orientation Relevance

Abstract
:1. Introduction
2. Method
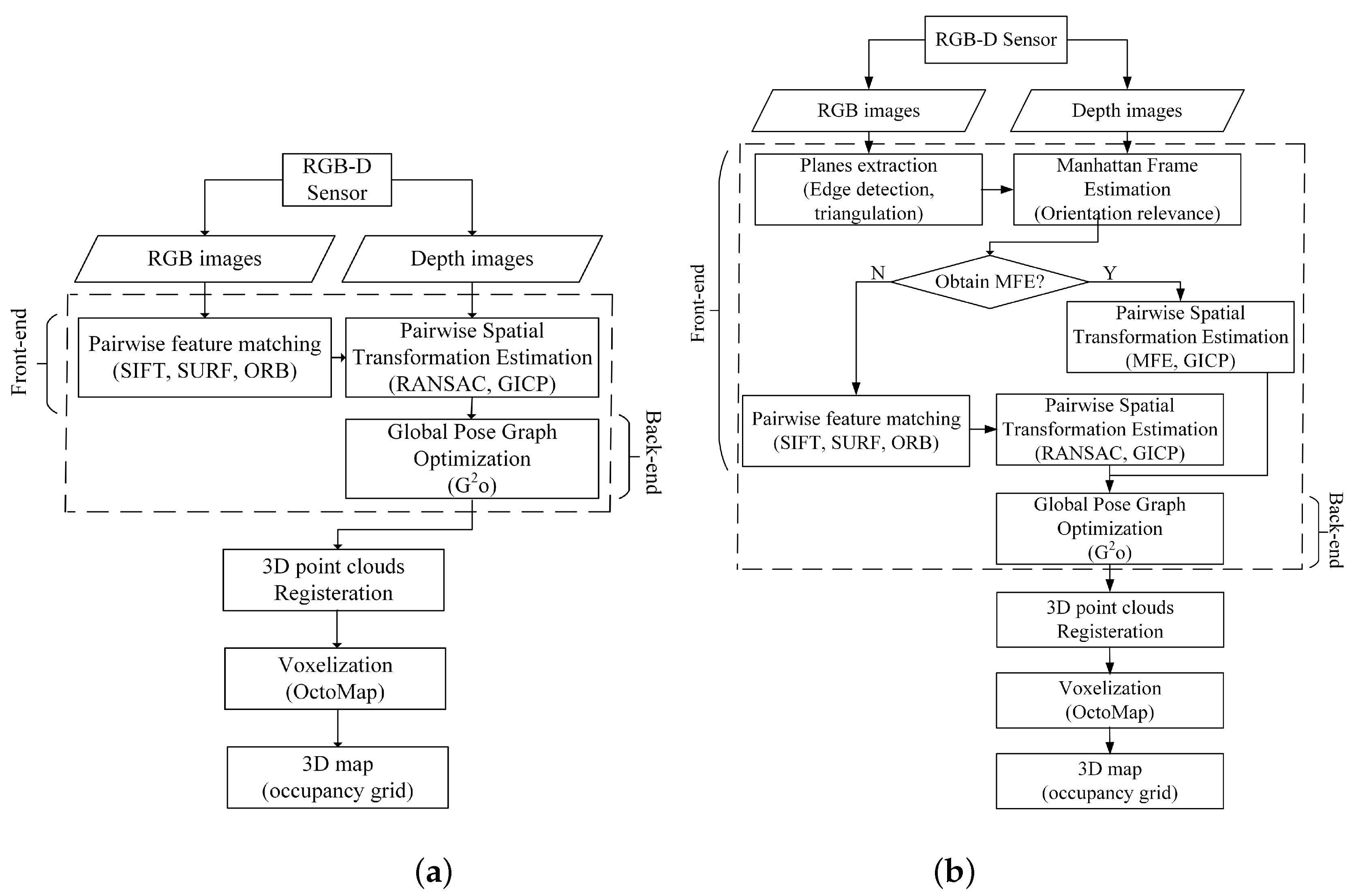
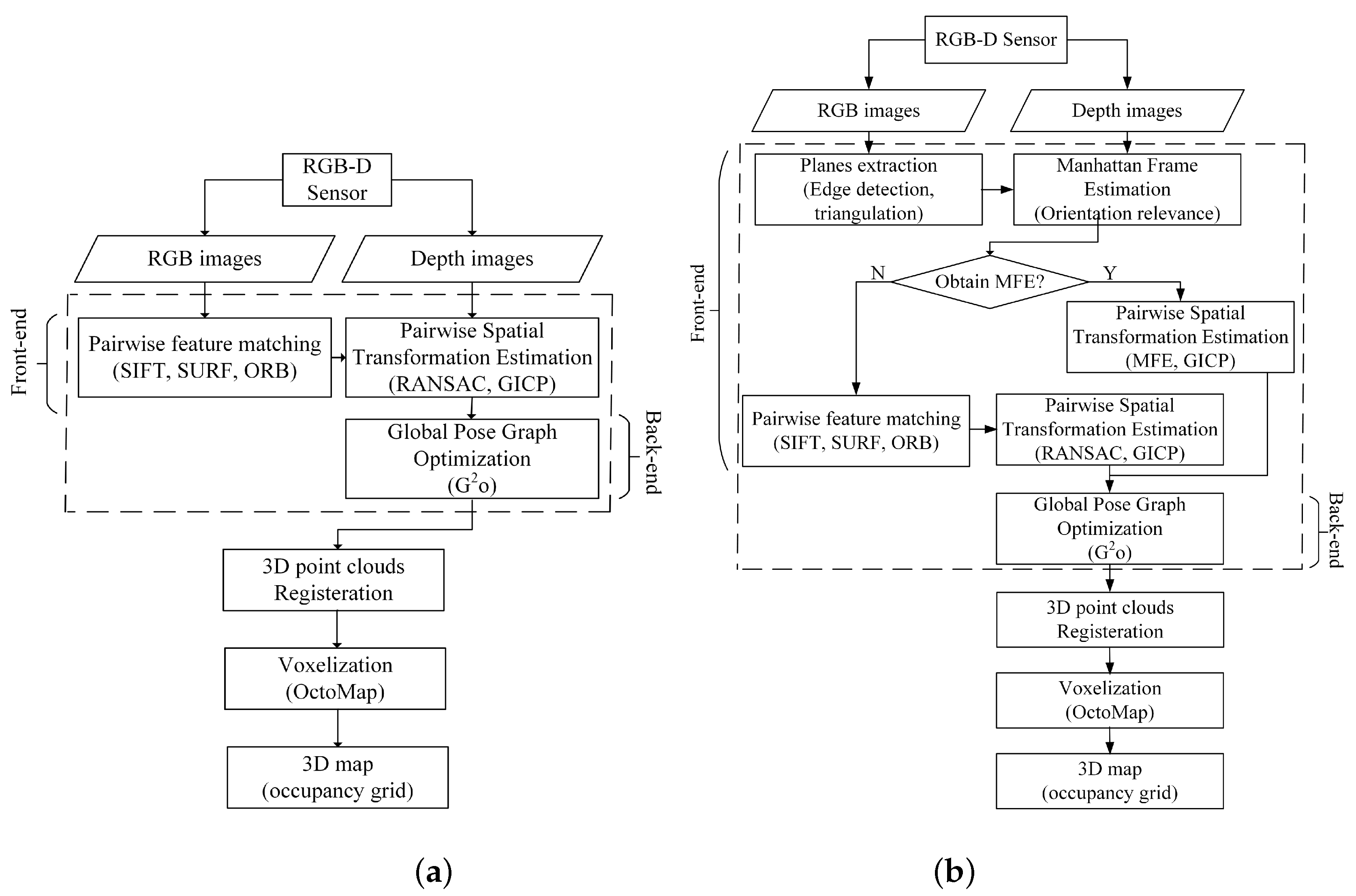
2.1. Overview of the Original Method
2.2. Manhattan Frame Estimation Using Orientation Relevance
2.3. Computation of Pairwise Spatial Transformation with the MFE
2.4. Improved RGB-D SLAM
| Algorithm 1 RGB-D SLAM with MFE Using Orientation Relevance |
Input: RGB-D sequences Output: Trajectory of RGB-D sensor and reconstructed environment.
|
3. Experiments
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SLAM | Simultaneously Localization And Mapping |
| RGB-D | Red Green Blue-Depth |
| 3D | three Dimensional |
| MW | Manhattan World |
| MF | Manhattan Frame |
| MFE | Manhattan Frame Estimation |
| RANSAC | RANdom SAmple Consensus |
| GICP | Generalized Iterative Closest Point |
| RMFE | Robust Manhattan Frame Estimation |
| RMSE | Root Mean Square Error |
| RI | Relative Improvement |
References
- Newcombe, R.A.; Izadi, S.; Hilliges, O.; Molyneaux, D.; Kim, D.; Davison, A.J.; Kohi, P.; Shotton, J.; Hodges, S.; Fitzgibbon, A. Kinectfusion: Real-time dense surface mapping and tracking. In Proceedings of the International Symposium on Mixed and Augmented Reality, Basel, Switzerland, 26–29 October 2011; pp. 127–136. [Google Scholar]
- Izadi, S.; Kim, D.; Hilliges, O.; Molyneaux, D.; Newcombe, R.; Kohli, P.; Shotton, J.; Hodges, S.; Freeman, D.; Davison, A.; et al. Kinectfusion: Real-time 3D reconstruction and interaction using a moving depth camera. In Proceedings of the ACM Symposium on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011; pp. 559–568. [Google Scholar]
- Whelan, T.; Kaess, M.; Johannsson, H.; Fallon, M.; Leonard, J.J.; McDonald, J. Real-time large-scale dense rgb-d slam with volumetric fusion. Int. J. Robot. Res. 2015, 34, 598–626. [Google Scholar] [CrossRef]
- Keller, M.; Lefloch, D.; Lambers, M.; Izadi, S.; Weyrich, T.; Kolb, A. Real-time 3D reconstruction in dynamic scenes using point-based fusion. In Proceedings of the Conference on 3D Vision, Seattle, WA, USA, 29 June–1 July 2013; pp. 1–8. [Google Scholar]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Estimating tree position, diameter at breast height, and tree height in real-time using a mobile phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef]
- Guo, R.; Peng, K.; Zhou, D.; Liu, Y. Robust visual compass using hybrid features for indoor environments. Electronics 2019, 8, 220. [Google Scholar] [CrossRef]
- Cai, Z.; Han, J.; Liu, L.; Shao, L. RGB-D datasets using Microsoft Kinect or similar sensors: A survey. Multimedia Tools Appl. 2017, 76, 4313–4355. [Google Scholar] [CrossRef]
- Meng, X.R.; Gao, W.; Hu, Z.Y. Dense RGB-D SLAM with multiple cameras. Sensors 2018, 18, 2118. [Google Scholar] [CrossRef] [PubMed]
- Fu, X.; Zhu, F.; Wu, Q.; Sun, Y.; Lu, R.; Yang, R. Real-time large-scale dense mapping with surfels. Sensors 2018, 18, 1493. [Google Scholar] [CrossRef] [PubMed]
- Henry, P.; Krainin, M.; Herbst, E.; Ren, X.; Fox, D. RGB-D mapping: Using kinect-style depth cameras for dense 3D modeling of indoor environments. Int. J. Robot. Res. 2012, 31, 647–663. [Google Scholar] [CrossRef]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D mappingwith an RGB-D camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Kümmerle, R.; Grisetti, G.; Strasdat, H.; Konolige, K.; Burgard, W. G2o: A general framework for graph optimization. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Yang, S.; Song, Y.; Kaess, M.; Scherer, S. Pop-up SLAM: Semantic monocular plane SLAM for low-texture environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 1222–1229. [Google Scholar]
- Wang, L.; Shen, C.; Duan, F.Q.; Lu, K. Energy-based automatic recognition of multiple spheres in three-dimensional point cloud. Pattern Recognit. Lett. 2016, 83, 287–293. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, L. Recovering the Manhattan Frame from a single RGB-D image by using orientation relevance. In Proceedings of the Chinese Control and Decision Conference, Chongqing, China, 28–30 May 2017; pp. 4574–4579. [Google Scholar]
- Wang, L.; Shen, C.; Duan, F.Q.; Guo, P. Energy-based multi-plane detection from 3D point clouds. In Neural Information Processing. ICONIP 2016. LNCS, vol 9948; Hirose, A., Ozawa, S., Doya, K., Ikeda, K., Lee, M., Liu, D., Eds.; Springer: Cham, Switzerland, 2016; pp. 715–722. [Google Scholar]
- Hsiao, M.; Westman, E.; Zhang, G.; Kaess, M. Keyframe-based dense planar SLAM. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 5110–5117. [Google Scholar]
- Le, P.H.; Košecka, J. Dense piecewise planar RGB-D SLAM for indoor environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 4944–4949. [Google Scholar]
- Ghanem, B.; Thabet, A.; Niebles, J.C. Robust Manhattan frame estimation from a single RGB-D image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Coughlan, J.M.; Yuille, A.L. Manhattan world: Compass direction from a single image by Bayesian inference. In Proceedings of the International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Lee, D.C.; Hebert, M.; Kanade, T. Geometric reasoning for single image structure recovery. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 2136–2143. [Google Scholar]
- Lee, D.C.; Gupta, A.; Hebert, M.; Kanade, T. Estimating spatial layout of rooms using volumetric reasoning about objects and surfaces. In Proceedings of the Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 6–9 December 2010. [Google Scholar]
- Sturm, J.; Engelhard, N.; Endres, F.; Burgard, W.; Cremers, D. A benchmark for the evaluation of RGB-D SLAM systems. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 573–580. [Google Scholar]
- Joo, K.; Oh, T.H.; Kweon, I.S.; Bazin, J.C. Globally optimal inlier set maximization for Atlanta frame estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5726–5734. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Frames | Duration (s) | Length (m) | Avg. Trans. Velocity (m/s) | Avg. Rot. Velocity (/s) | Range (m) |
|---|---|---|---|---|---|---|
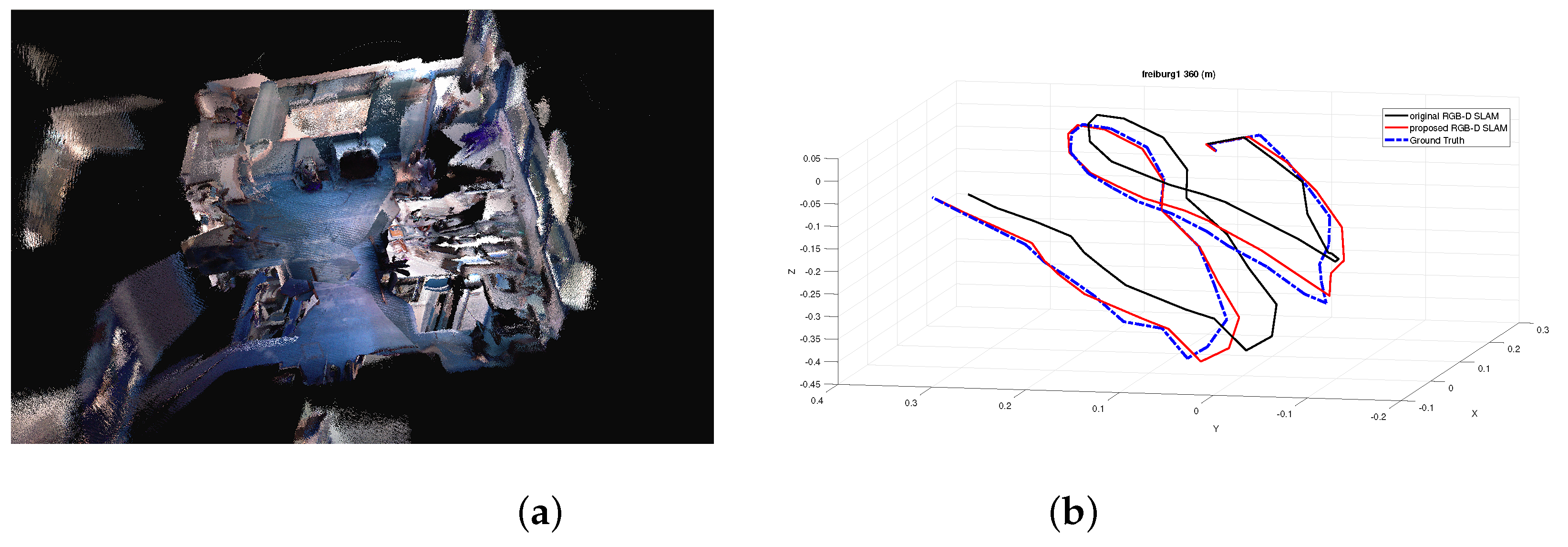
| fr1/360 | 745 | 28.69 | 5.82 | 0.21 | 41.60 | 0.54 × 0.46 × 0.47 |
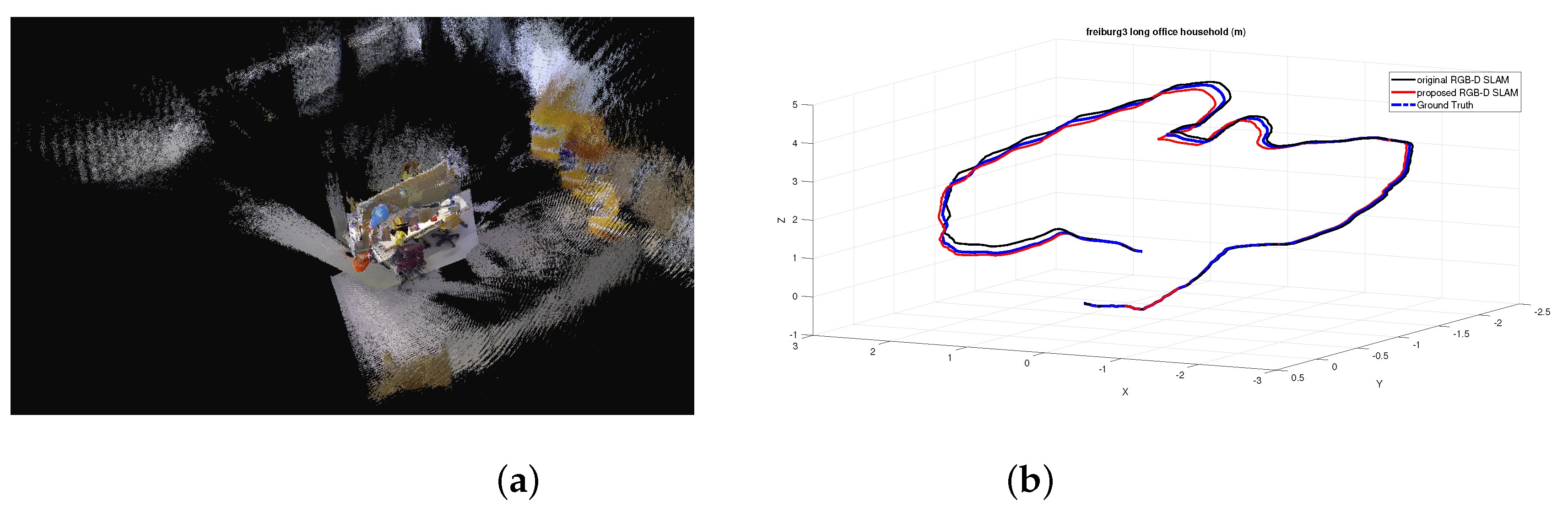
| fr3/long_office _household | 2585 | 87.09 | 21.45 | 0.25 | 10.19 | 5.12 × 4.89 × 0.54 |
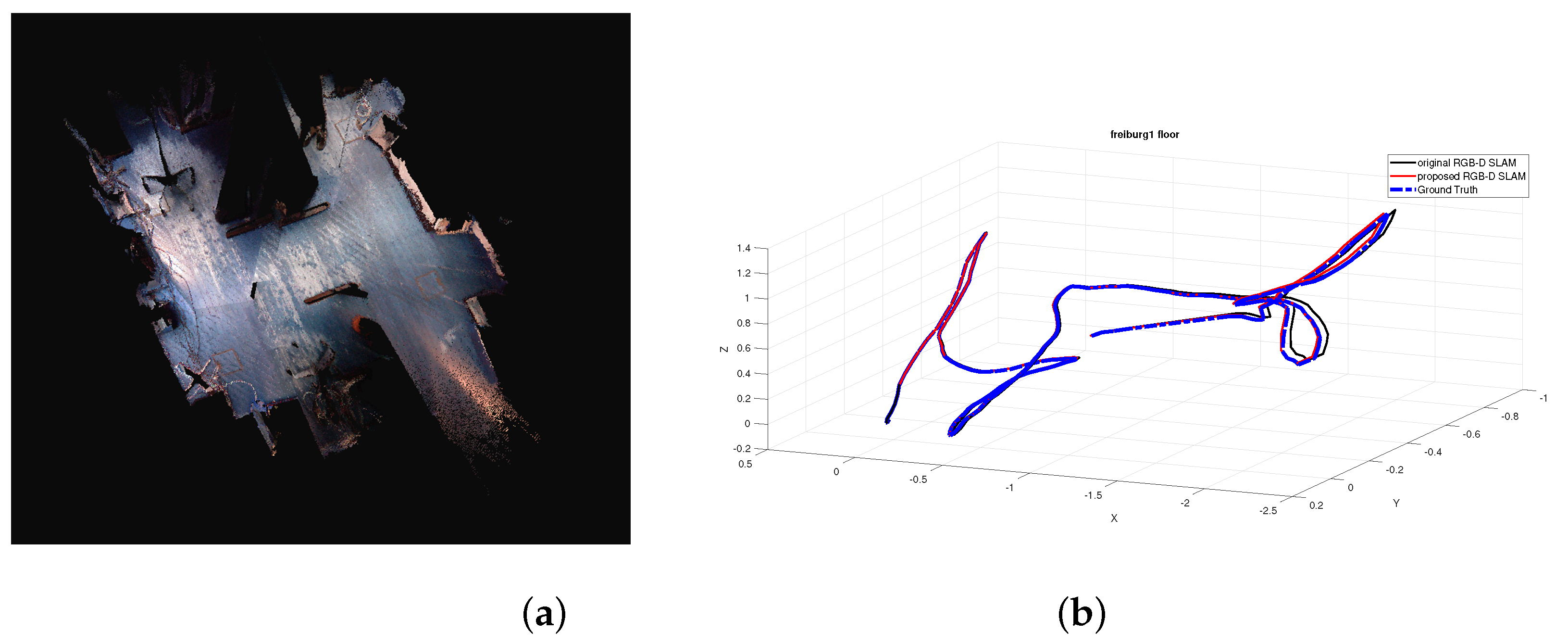
| fr1/floor | 1214 | 49.87 | 12.57 | 0.258 | 15.07 | 2.30 × 1.31 × 1.58 |
| Method | Translation | Rotation | Runtime | |||
|---|---|---|---|---|---|---|
| RMSE (m) | RI | RMSE () | RI | (s) | RI | |
| original method [11] | 0.103 | − | 3.41 | − | 145 | − |
| method with RMFE [19] | 0.107 | 3.37 | 112 | |||
| proposed method | 0.082 | 3.10 | 100 | |||
| Method | Translation | Rotation | Runtime | |||
|---|---|---|---|---|---|---|
| RMSE (m) | RI | RMSE () | RI | (s) | RI | |
| original method [11] | 0.082 | − | 1.63 | − | 722 | − |
| proposed method | 0.052 | 1.52 | 511 | |||
| Method | Translation | Rotation | Runtime | |||
|---|---|---|---|---|---|---|
| RMSE (m) | RI | RMSE () | RI | (s) | RI | |
| original method [11] | 0.061 | − | 2.72 | − | 488 | − |
| proposed method | 0.054 | 2.69 | 402 | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wu, Z. RGB-D SLAM with Manhattan Frame Estimation Using Orientation Relevance. Sensors 2019, 19, 1050. https://doi.org/10.3390/s19051050
Wang L, Wu Z. RGB-D SLAM with Manhattan Frame Estimation Using Orientation Relevance. Sensors. 2019; 19(5):1050. https://doi.org/10.3390/s19051050
Chicago/Turabian StyleWang, Liang, and Zhiqiu Wu. 2019. "RGB-D SLAM with Manhattan Frame Estimation Using Orientation Relevance" Sensors 19, no. 5: 1050. https://doi.org/10.3390/s19051050
APA StyleWang, L., & Wu, Z. (2019). RGB-D SLAM with Manhattan Frame Estimation Using Orientation Relevance. Sensors, 19(5), 1050. https://doi.org/10.3390/s19051050