Energy and Delay Aware Data Aggregation in Routing Protocol for Internet of Things

 , ,
, ,  and
and 
Abstract
1. Introduction
- The EDADA-RPL’s primary goal is to prevent redundant data transmission from the source to the root of DODAG.
- The CS theory-based data aggregation avoids redundant data transmission and prolongs the network lifetime.
- The efficiency of EDADA -RPL is assessed using COOJA simulator.
2. Related Works
3. Network Model
- Nodes are deployed randomly on the network.
- All nodes are having the same energy.
- The rate of data transfer is one packet a minute.
4. Data Aggregation Using Compressed Sensing Theory
4.1. Data Aggregation
4.2. Compressed Sensing Theory
4.2.1. Sensor Data
4.2.2. Sparse Matrix Representation
4.2.3. Observation Matrix Representation
4.2.4. Data Recovery
5. Energy and Delay Aware Data Aggregation in RPL
5.1. Parent Selection
5.2. Parent Rank Calculation
| Algorithm 1: EDADA-RPL parent selection |
| Input: DIO, DAO, DAO-ACK, DIO_RER |
| Output: Optimal Parent |
| 1:For preferred_ParentNodeparentNode-list do |
| 2: compute RER |
| 3:compute the Rank(N) |
| 4:Calculate the Rank_Increase_Value |
| 5:IfBest_ParentNode>= Preferred_ParentNodeThen |
| Best_ParentNode=Preferred_ParentNode |
| 6:End |
| 7:Whilepreferred_ParentNode==Best_ParentNodedo |
| SourceNode=Preferred_ParentNode |
| 8:End |
| 9:End |
| 10:Return Optimal Parent |
5.3. Data Aggregation in Parent Node Using CS Theory
| Algorithm 2: Data Aggregation Using Compressed Sensing Theory |
| Input: Sensor data = {1, 2,…, n} |
| Output: Compressed data y |
| 1:Compute the data aggregation fromPN1 to DODAG root |
| 2:Compute the data aggregation in DODAG root from the M paths |
| 3: Return the aggregated data y. |
5.4. Data Reconstruction Using Matching Pursuit Algorithm
| Algorithm 3: Data Reconstruction Using Matching Pursuit Algorithm |
| Input: compressed data |
| Output: Reconstructed data |
| 1:Initialize: |
| = 0, and i = 0 |
| 2:iteration: |
| 3: i = i + 1 |
| 4: |
| 5: |
| 6:Compute residual error |
| 7:If there is no error in then |
| 8:return d |
| 9:End |
| 10:End |
6. Result and Discussions
6.1. Performance Evaluation Metrics
6.2. Simulation Results
6.2.1. End-to-End Delay
6.2.2. Number of Parent Change
6.2.3. Number of Hop Count
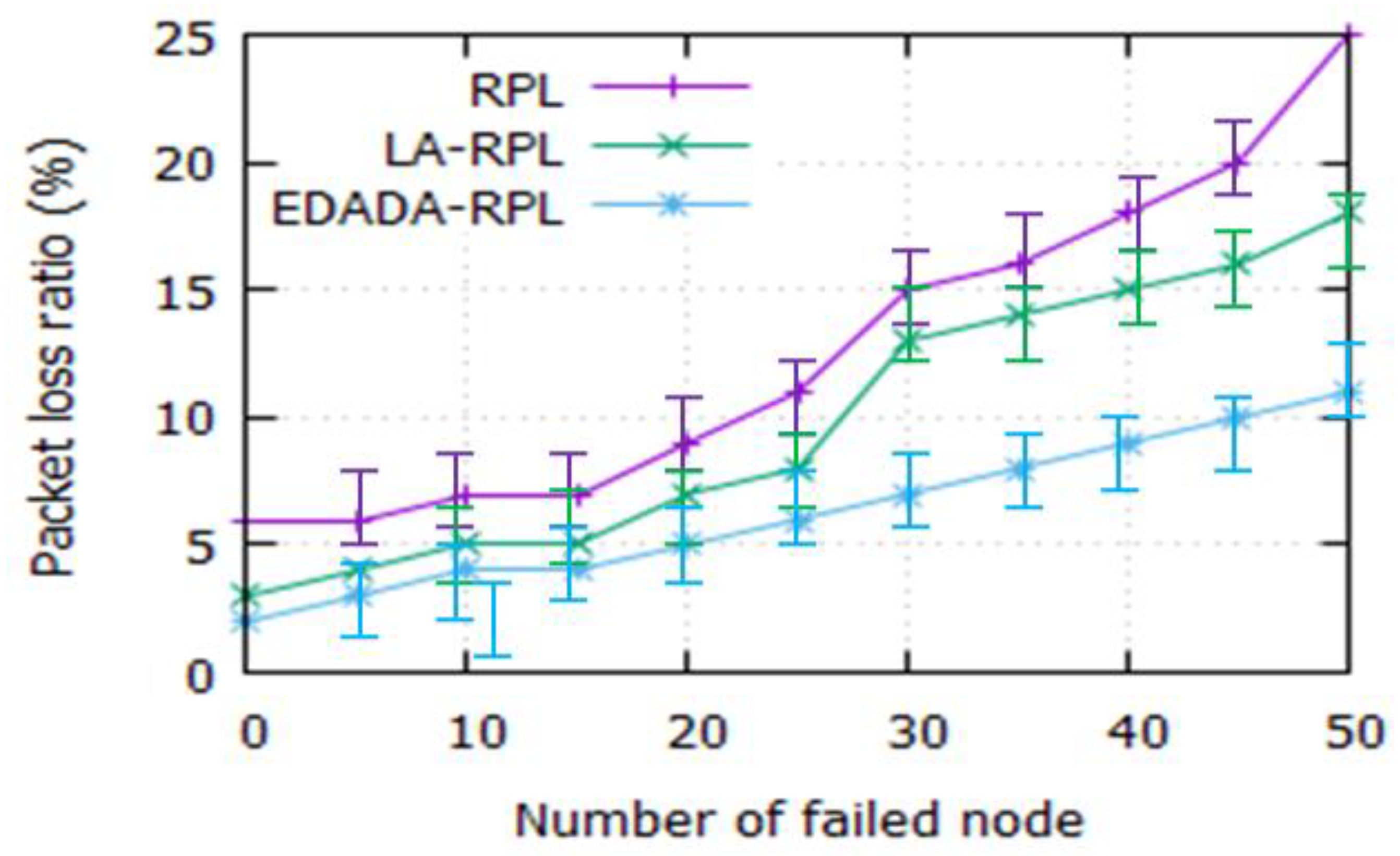
6.2.4. Packet Loss Ratio with Presence of Failed Node Scenario
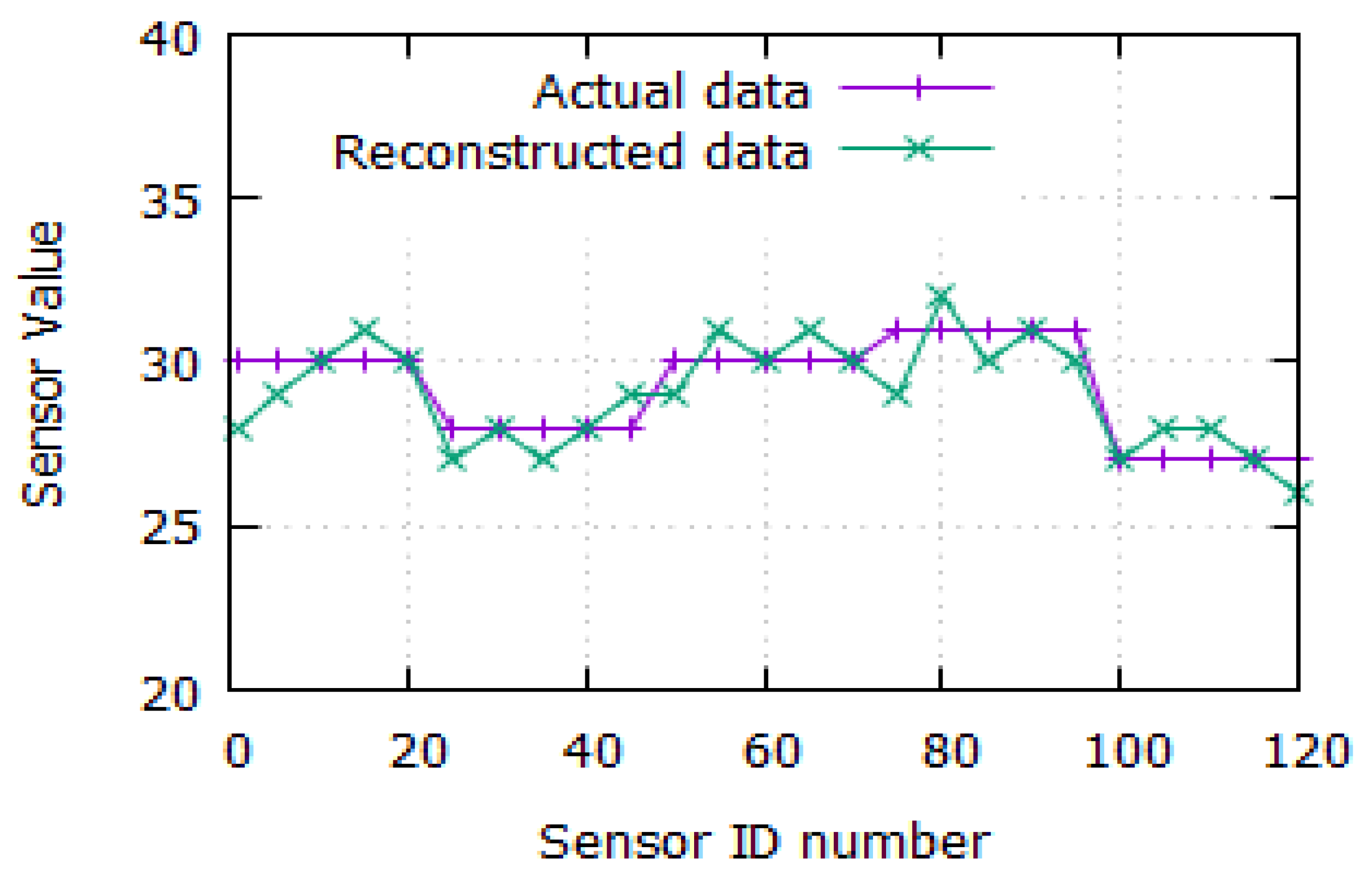
6.2.5. Actual and Reconstructed Sensor Data
6.2.6. Node Energy Consumption
6.2.7. Reconstruction MSE Value
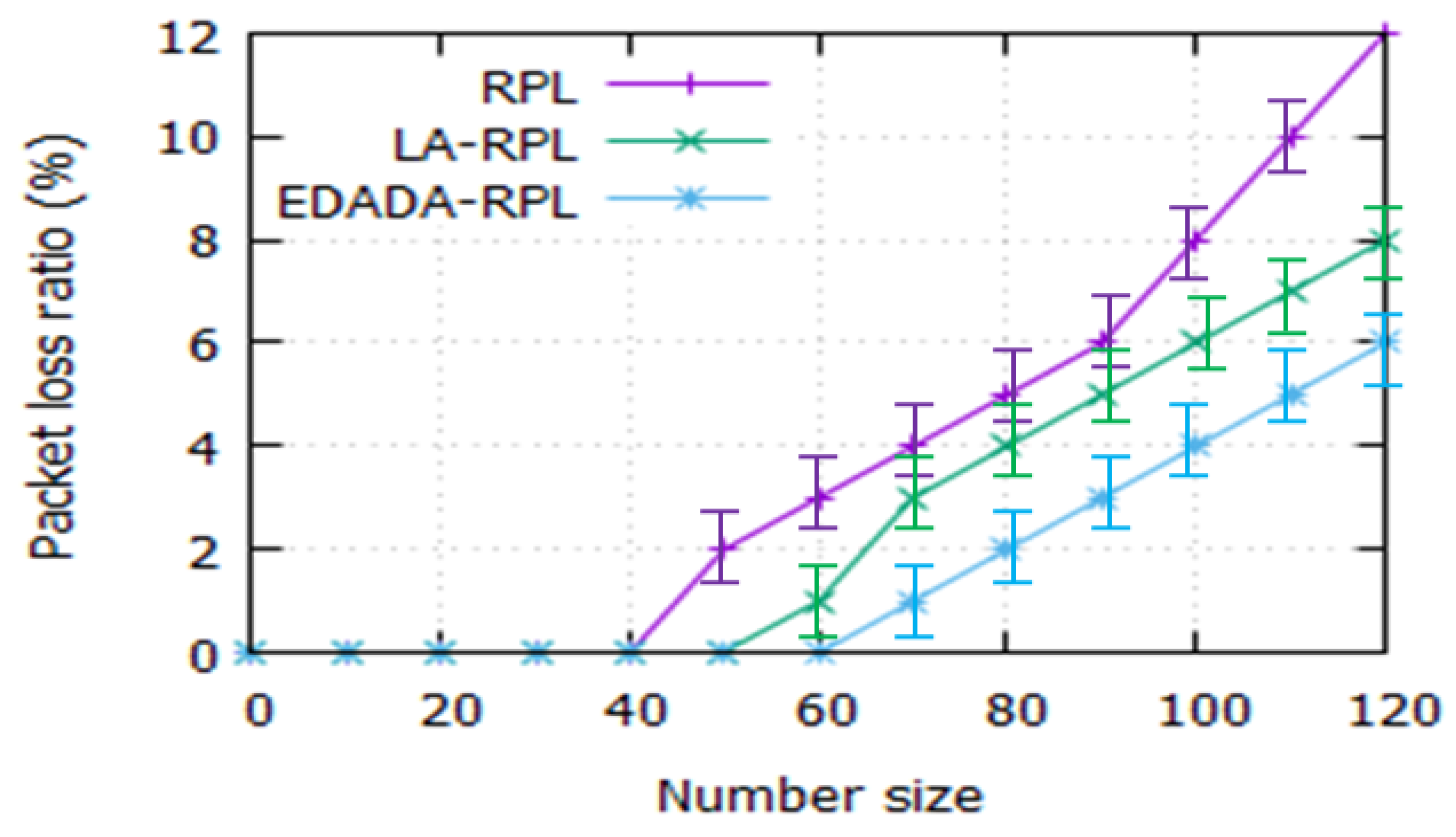
6.2.8. Packet Loss Ratio
7. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Sankar, S.; Srinivasan, P. Internet of things (iot): A survey on empowering technologies, research opportunities and applications. Int. J. Pharm. Technol. 2016, 8, 26117–26141. [Google Scholar]
- Khanna, A.; Kaur, S. Evolution of Internet of Things (IoT) and its significant impact in the field of Precision Agriculture. Comput. Electron. Agric. 2019, 157, 218–231. [Google Scholar] [CrossRef]
- Kaur, K.; Sharma, A. Interoperability Among Internet of Things (IoT) Components Using Model-Driven Architecture Approach. In Information and Communication Technology for Competitive Strategies; Springer: Singapore, 2019; pp. 519–534. [Google Scholar]
- Sankar, S.; Srinivasan, P. Composite metric based energy efficient routing protocol for internet of things. Int. J. Intell. Eng. Syst. 2017, 10, 278–286. [Google Scholar]
- Goyal, P.; Singh, P. Improved Design of Vertical Cavity Surface Emitting Laser for 3D Sensing in Internet of Things Applications. In Green Building Management and Smart Automation; IGI Global: Hershey, PA, USA, 2020; pp. 64–89. [Google Scholar]
- Sanshi, S.; Jaidhar, C.D. Enhanced mobility aware routing protocol for Low Power and Lossy Networks. Wirel. Netw. 2019, 25, 1641–1655. [Google Scholar] [CrossRef]
- Hoghooghi, S.; Esfahani, R.N. Mobility-Aware Parent Selection for Routing Protocol in Wireless Sensor Networks using RPL. In Proceedings of the 2019 5th International Conference on Web Research (ICWR), Tehran, Iran, 24–25 April 2019. [Google Scholar]
- Kharrufa, H.; Al-Kashoash, H.A.A.; Kemp, A.H. RPL-based routing protocols in IoT applications: A Review. IEEE Sens. J. 2019, 19, 5952–5967. [Google Scholar] [CrossRef]
- Lamaazi, H.; Benamar, N. A comprehensive survey on enhancements and limitations of the RPL protocol: A focus on the objective function. Ad Hoc Netw. 2020, 96, 102001. [Google Scholar] [CrossRef]
- Lim, C. A survey on congestion control for RPL-based wireless sensor networks. Sensors 2019, 19, 2567. [Google Scholar] [CrossRef]
- Awan, K.M.; Ashraf, N.; Saleem, M.Q.; Sheta, O.E.; Qureshi, K.N.; Zeb, A.; Haseeb, K.; Sadiq, A.S. A priority-based congestion-avoidance routing protocol using IoT-based heterogeneous medical sensors for energy efficiency in healthcare wireless body area networks. Int. J. Distrib. Sens. Netw. 2019, 15. [Google Scholar] [CrossRef]
- Shelke, M.N.; Shinde, M.R. Energy Saving Techniques in Wireless Sensor Networks. Int. J. Sci. Eng. Res. 2013, 4, 396. [Google Scholar]
- Latha, A.; Prasanna, S.; Hemalatha, S.; Sivakumar, B. A harmonized trust assisted energy efficient data aggregation scheme for distributed sensor networks. Cogn. Syst. Res. 2019, 56, 14–22. [Google Scholar] [CrossRef]
- Dagar, M.; Mahajan, S. Data aggregation in wireless sensor network: A survey. Int. J. Inf. Comput. Technol. 2013, 3, 167–174. [Google Scholar]
- Li, J.; Siddula, M.; Cheng, X.; Cheng, W.; Tian, Z.; Li, Y. Approximate data aggregation in sensor equipped IoT networks. Tsinghua Sci. Technol. 2019, 25, 44–55. [Google Scholar] [CrossRef]
- Mahdian, B.; Mohsen, M.; Mohseni, M. A Method for Deploying Relay Nodes in Homogeneous Wireless Sensor Networks Using Particle Optimization Algorithm. J. Soft Comput. Decis. Support Syst. 2019, 6, 1–9. [Google Scholar]
- Gilbert, E.P.; Baskaran, K.; Rajsingh, E.B.; Lydia, M.; Selvakumar, A.I. Trust aware nature inspired optimised routing in clustered wireless sensor networks. Int. J. Bio-Inspired Comput. 2019, 14, 103–113. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.Y.; Chen, J.; Hua, G.; Zhang, Y.; Xiang, Y. Compressed sensing based selective encryption with data hiding capability. IEEE Trans. Ind. Inform. 2019. [Google Scholar] [CrossRef]
- Wang, Q.; Lin, D.; Yang, P.; Zhang, Z. An Energy-Efficient Compressive Sensing-Based Clustering Routing Protocol for WSNs. IEEE Sens. J. 2019, 19, 3950–3960. [Google Scholar] [CrossRef]
- Homaei, M.H.; Salwana, E.; Shamshirband, S. An Enhanced Distributed Data Aggregation Method in the Internet of Things. Sensors 2019, 19, 3173. [Google Scholar] [CrossRef]
- Bahramlou, A.; Javidan, R. Adaptive timing model for improving routing and data aggregation in Internet of things networks using RPL. IET Netw. 2018, 7, 306–312. [Google Scholar] [CrossRef]
- Conti, M.; Kaliyar, P.; Lal, C. Reliable Group Communication Protocol for Internet of Things. arXiv 2019, arXiv:1904.04542. [Google Scholar]
- Jin, Y.; Gormus, S.; Kulkarni, P.; Sooriyabandara, M. Content centric routing in IoT networks and its integration in RPL. Comput. Commun. 2016, 89, 87–104. [Google Scholar] [CrossRef]
- Zhao, M.; Shwe, H.Y.; Chong, P.H.J. Cluster-parent based rpl for low-power and lossy networks in building environment. In Proceedings of the 2015 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015. [Google Scholar]
- Agarwal, M.M.; Govil, M.C.; Sinha, M.; Gupta, S. Fuzzy based Data Fusion for Energy Efficient Internet of Things. Int. J. Grid High Perform. Comput. (IJGHPC) 2019, 11, 46–58. [Google Scholar] [CrossRef]
- Barcelo, M.; Correa, A.; Vicario, J.L.; Morell, A. Cooperative interaction among multiple RPL instances in wireless sensor networks. Comput. Commun. 2016, 81, 61–71. [Google Scholar] [CrossRef]
- Sankar, S.; Srinivasan, P. Fuzzy Sets Based Cluster Routing Protocol for Internet of Things. Int. J. Fuzzy Syst. Appl. (IJFSA) 2019, 8, 70–93. [Google Scholar] [CrossRef]
- Al-Nidawi, Y.; Salman, N.; Kemp, A.H. Mesh-under cluster-based routing protocol for IEEE 802.15.4 sensor network. In Proceedings of the 20th European Wireless Conference, Barcelona, Spain, 14–16 May 2014; pp. 1–7. [Google Scholar]
- Yang, G.; Xiao, M.; Zhang, S. Data aggregation scheme based on compressed sensing in wireless sensor network. In Proceedings of the 3rd International Conference on Information Computing and Applications (ICICA ’12), Chengde, China, 14–16 September 2012; pp. 556–561. [Google Scholar]
- Zhang, C.; Li, O.; Yang, Y.; Liu, G.; Tong, X. Energy-efficient data gathering algorithm relying on compressive sensing in lossy WSNs. Measurement 2019, 147, 106875. [Google Scholar] [CrossRef]
- Goyal, P.; Singh, B. Sparse Signal Recovery through Regularized Orthogonal Matching Pursuit for WSNs Applications. In Proceedings of the 2019 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 7–8 March 2019. [Google Scholar]
- Singh, P.; Chen, Y.C. RPL Enhancement for a Parent Selection Mechanism and an Efficient Objective Function. IEEE Sens. J. 2019, 19, 10054–10066. [Google Scholar] [CrossRef]
- Kamgueu, P.O.; Nataf, E.; DjotioNdié, T.; Festor, O. Energy-Based Routing Metric for RPL; INRIA: Le Chesnay, France, 2013. [Google Scholar]
- Gaddour, O.; Koubâa, A. RPL in a nutshell: A survey. Comput. Netw. 2012, 56, 3163–3178. [Google Scholar] [CrossRef]
- Xing, X.; Xie, D.; Wang, G. Energy-balanced data gathering and aggregating in WSNs: A compressed sensing scheme. Int. J. Distrib. Sens. Netw. 2015, 11, 585191. [Google Scholar] [CrossRef]
- Yang, C.; Feng, W.; Feng, H.; Yang, T.; Hu, B. A sparsity adaptive subspace pursuit algorithm for compressive sampling. Acta Electron. Sin. 2010, 38, 1914–1917. [Google Scholar]
- Accettura, N.; Grieco, L.A.; Boggia, G.; Camarda, P. Performance analysis of the RPL routing protocol. In Proceedings of the 2011 IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; pp. 767–772. [Google Scholar]
- Wallgren, L.; Raza, S.; Voigt, T. Routing attacks and countermeasures in the RPL-based internet of things. Int. J. Distrib. Sens. Netw. 2013, 9, 794326. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S.No | Protocol | Author’s | Proposed Technique | Improvement | Limitations |
|---|---|---|---|---|---|
| 1 | LA-RPL | Mohammad HosseinHomaei et al. | learning automata-based dynamic data aggregation | Extends the network lifetime | It does not consider the trickle timer |
| 2 | A-RPL | Ainaz Bahramlou and Reza Javidan | data aggregation based RPL | Increased the network lifetime | congestion occurs in a particular situation |
| 3 | RECOUP-RPL | Mauro Conti et al. | cluster-based multicast routing | Increased the packet delivery ratio | It takes more energy consumption, as it checks each data packets in each node. |
| 4 | CCR-RPL | YichaoJin et al. | content-centric routing | better performance in terms of latency, energy efficiency and reliability | Create the congestion due to dynamic network conditions. |
| 5 | C-RPL | Ming Zhao et al. | Cluster parent routing | Increased the reliability | It takes more time to choose the cluster parent |
| 6 | FLWP | Madan Mohan Agarwal et al. | fuzzy-based data fusion technique | It provides superior performance than the AODV | It takes a longer time to predict the parent node |
| 7 | C-RPL | Marc Barcode et al. | cooperative interaction | Increased the network lifetime | It takes additional time to choose the parent node present in the multiple DODAG |
| 8 | FC-RPL | S. Sankar and P. Srinivasan | cluster routing | Extended the network lifetime | It forms the more number of clusters in the network. |
| 9 | MUCBR-RPL | Yaarob Al-Nidavi et al. | cluster routing | Improved the network lifetime and packet delivery ratio | Initially, it takes time to form the cluster. |
| Parameter | Value |
|---|---|
| Operating System | Contiki 2.7 |
| Simulator | COOJA |
| Initial Energy | 1500 mA |
| Routing Protocol | RPL |
| Simulation Time | 1 h |
| Network area | 300 m × 300 m |
| Topology | Random |
| Node Type | Skymote |
| Number of Nodes | 120 |
| MAC Layer | 802.15.4 |
| Data Transmission Interval | 60 sec |
| Physical Layer | Two Ray Ground Propagation Model |
| RPL Parameter | MinHopRankIncrease = 256 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sennan, S.; Balasubramaniyam, S.; Luhach, A.K.; Ramasubbareddy, S.; Chilamkurti, N.; Nam, Y. Energy and Delay Aware Data Aggregation in Routing Protocol for Internet of Things. Sensors 2019, 19, 5486. https://doi.org/10.3390/s19245486
Sennan S, Balasubramaniyam S, Luhach AK, Ramasubbareddy S, Chilamkurti N, Nam Y. Energy and Delay Aware Data Aggregation in Routing Protocol for Internet of Things. Sensors. 2019; 19(24):5486. https://doi.org/10.3390/s19245486
Chicago/Turabian StyleSennan, Sankar, Sathiyabhama Balasubramaniyam, Ashish Kr. Luhach, Somula Ramasubbareddy, Naveen Chilamkurti, and Yunyoung Nam. 2019. "Energy and Delay Aware Data Aggregation in Routing Protocol for Internet of Things" Sensors 19, no. 24: 5486. https://doi.org/10.3390/s19245486
APA StyleSennan, S., Balasubramaniyam, S., Luhach, A. K., Ramasubbareddy, S., Chilamkurti, N., & Nam, Y. (2019). Energy and Delay Aware Data Aggregation in Routing Protocol for Internet of Things. Sensors, 19(24), 5486. https://doi.org/10.3390/s19245486