Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera



Abstract
1. Introduction
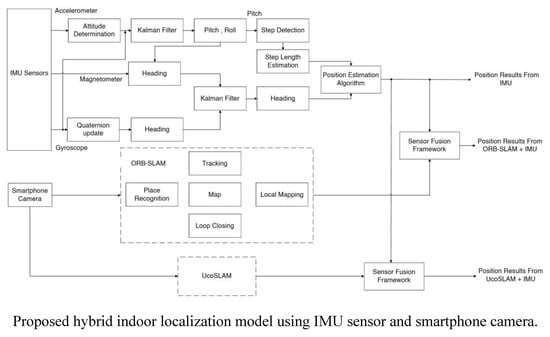
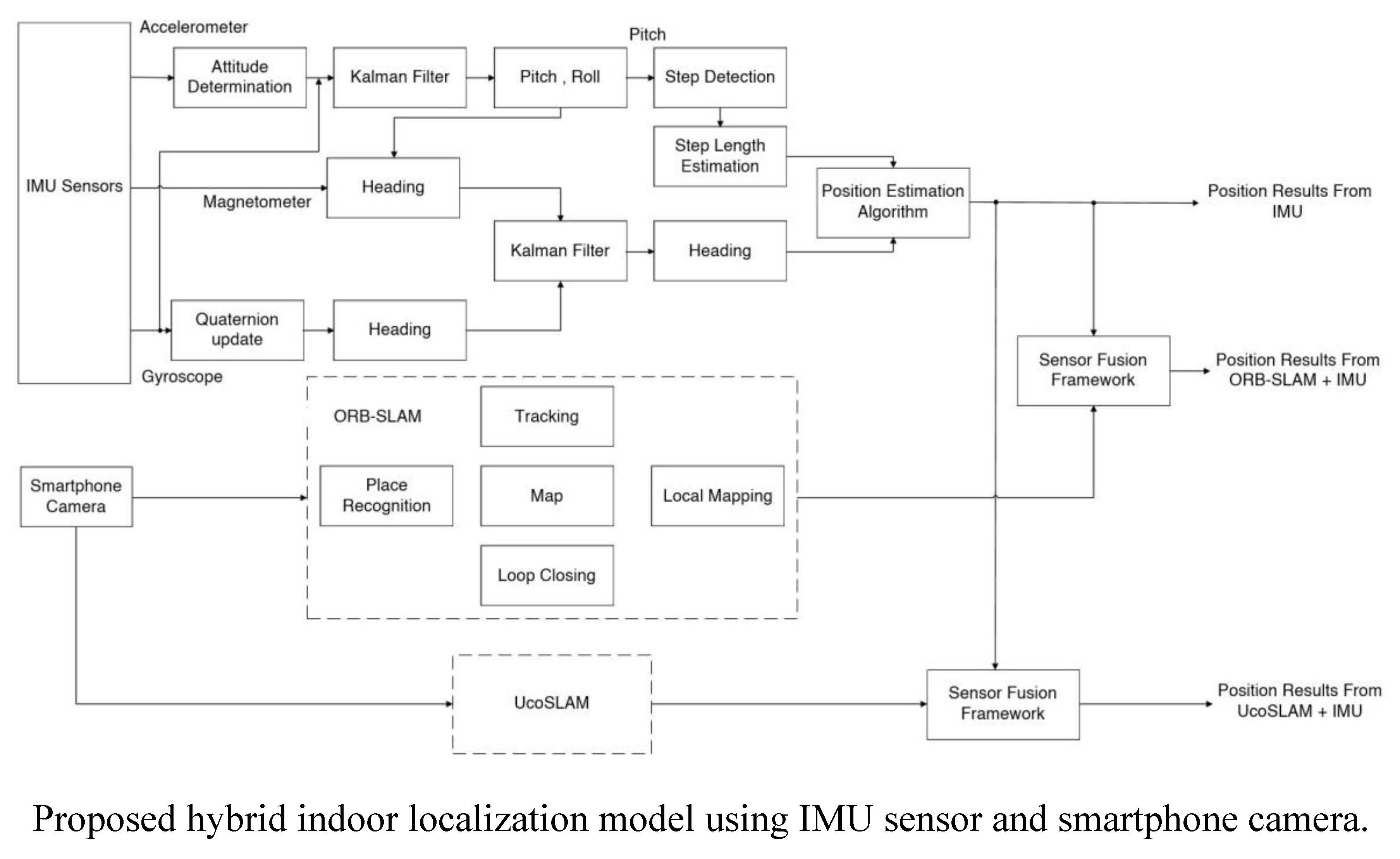
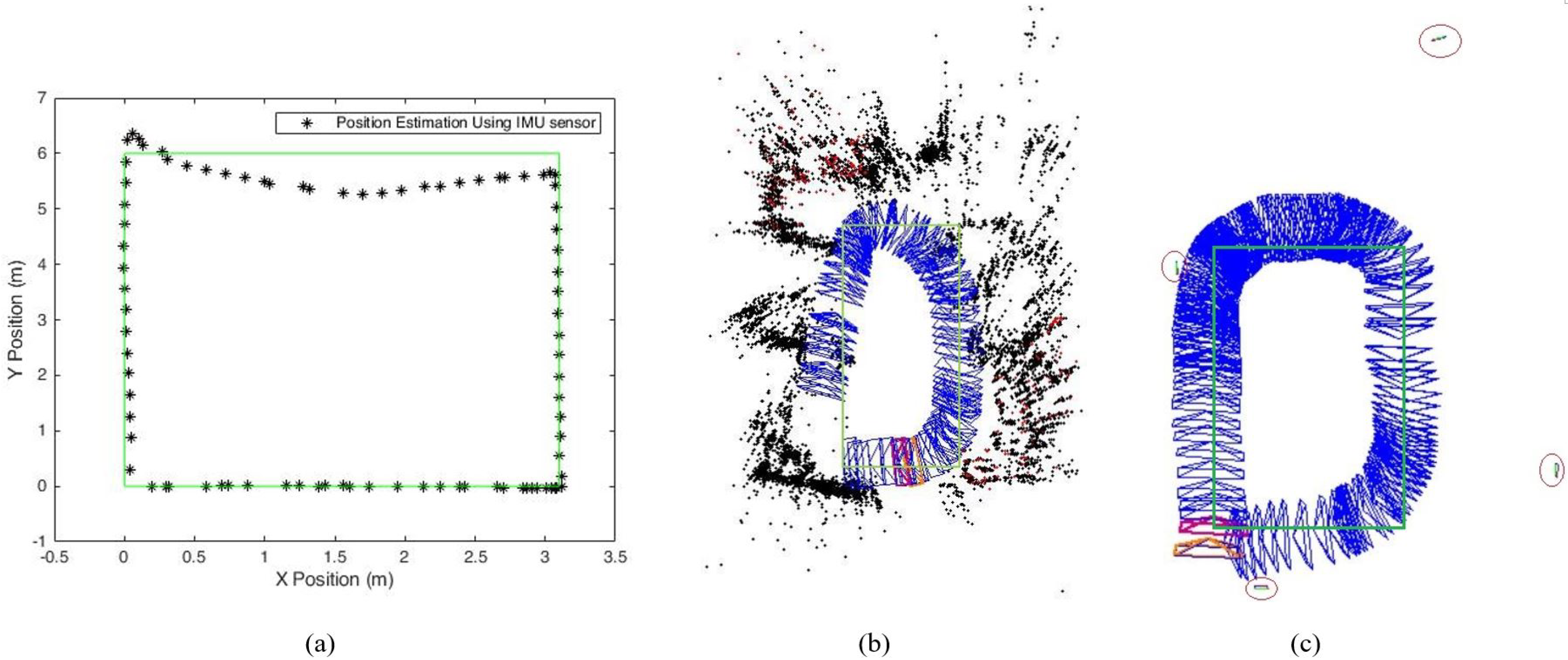
- We implemented an IMU-based indoor localization system. The proposed IMU system uses the accelerometer, gyroscope and magnetometer for position estimation. A pitch based estimator is used for step detection and step length estimation. A sensor fusion algorithm is used for heading estimation. The user position is estimated by using step length and heading information.
- We followed an oriented fast rotated binary robust independent elementary features (ORB)-SLAM algorithm proposed by Mur-Artal et al. [10] for the camera based localization system. The ORB-SLAM uses the same features for tracking, mapping, relocalization and loop closing. This makes the ORB-SLAM system more efficient, simple and reliable as compared to other SLAM techniques.
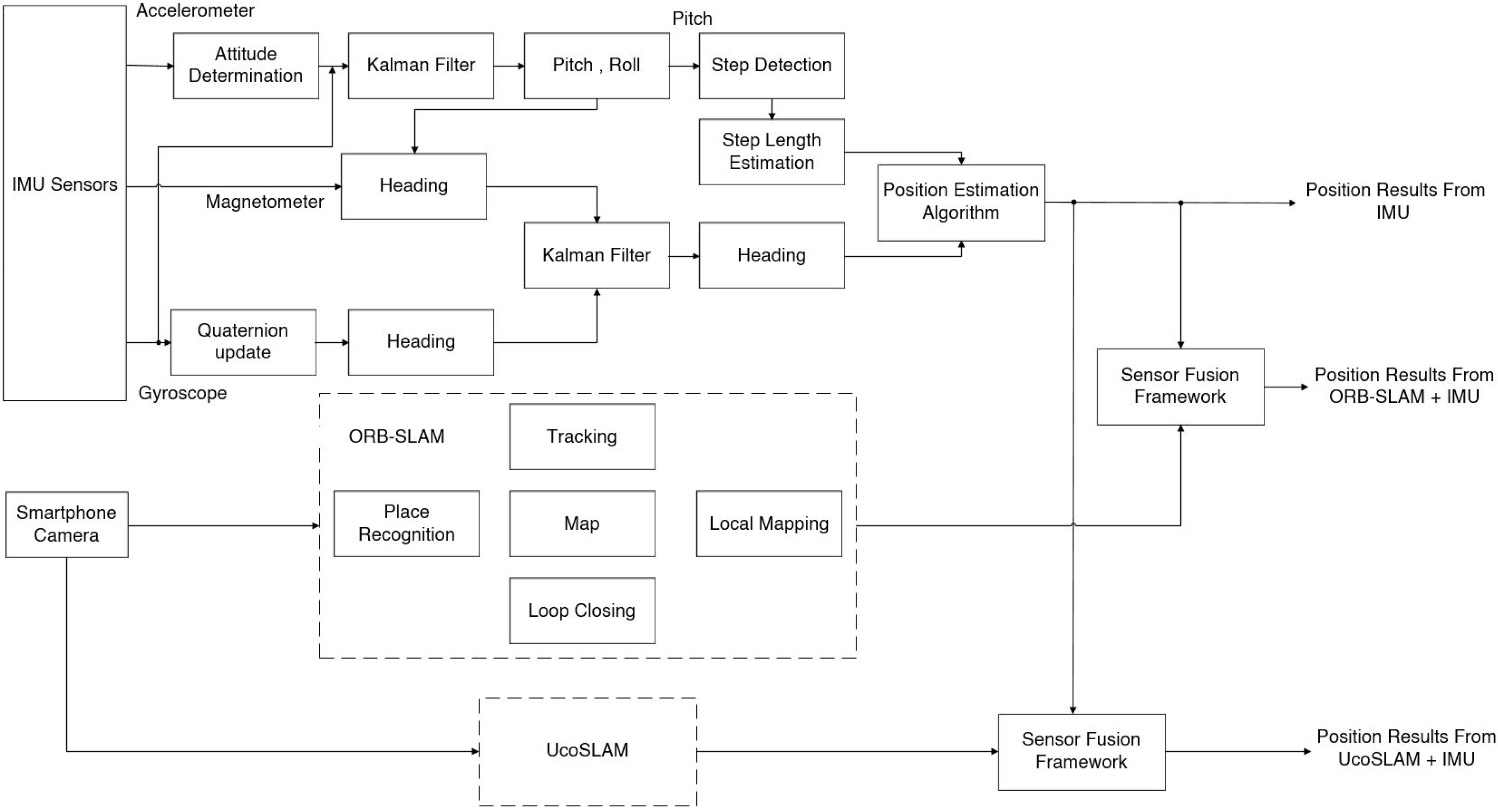
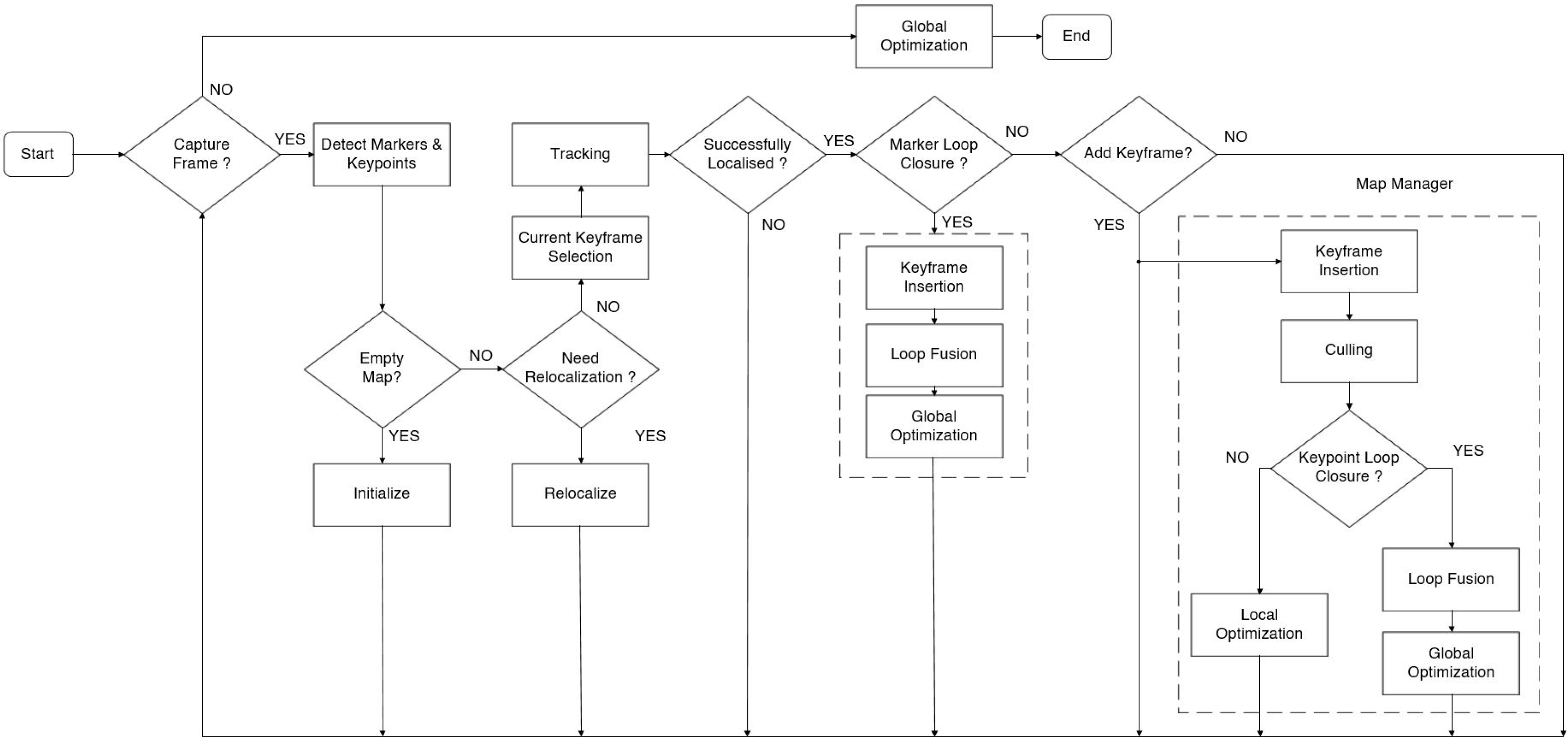
- We developed a SLAM by fusion of keypoints and squared planar markers (UcoSLAM) algorithm proposed by Munoz-Salinas et al. [11] for the camera based localization system by adding markers to the experiment area. We used Augmented Reality Uco Codes (ArUco) markers for localization and the markers improved the localization accuracy.
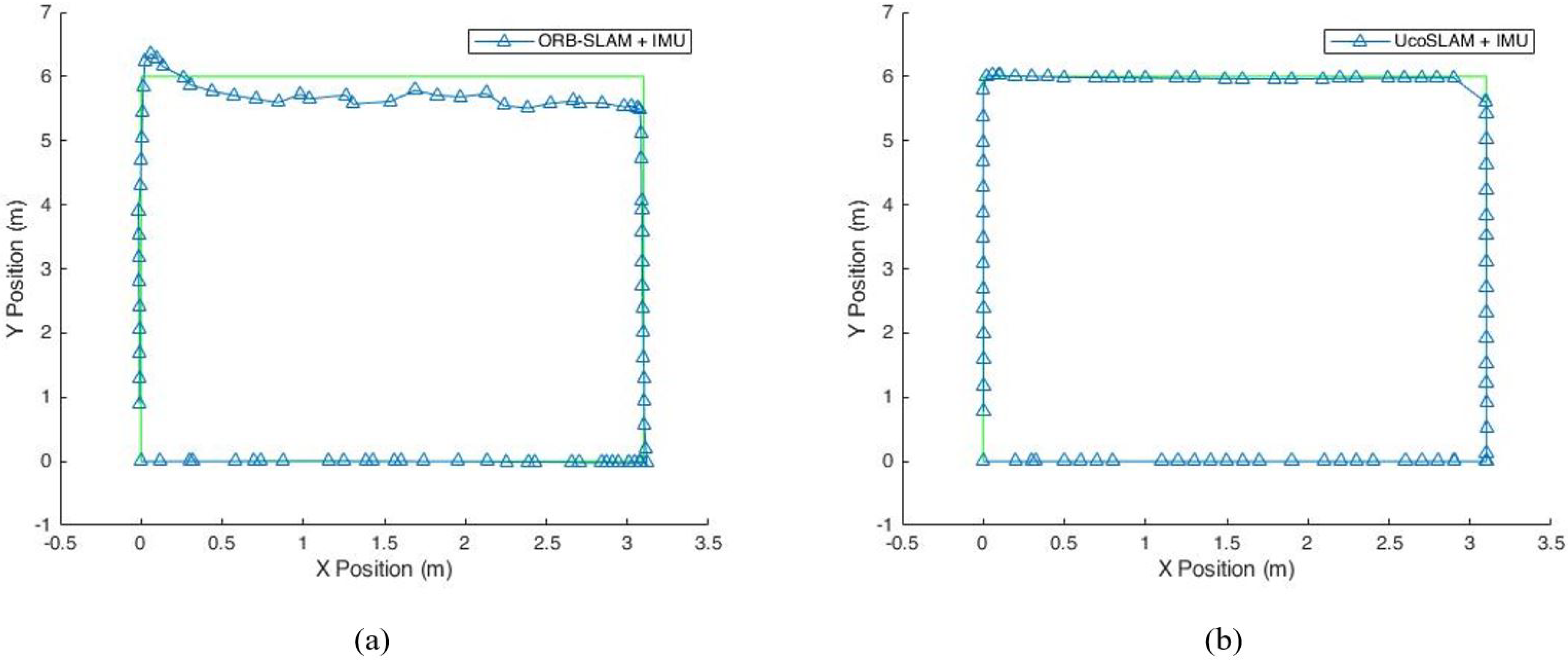
- We proposed hybrid indoor localization systems using an IMU sensor and a smartphone camera. The sensor fusion is achieved by a Kalman filter and the proposed systems reduced the IMU sensor errors and heading errors from camera-based localization systems.
2. Related Work
3. Model for Indoor Localization Using IMU Sensor and Smartphone Camera
3.1. Indoor Localization Using IMU Sensor
3.2. Indoor Localization Using Smartphone Camera
3.2.1. Localization Using ORM-SLAM
3.2.2. Localization Using UcoSLAM
3.3. Hybrid Indoor Localization Using IMU Sensor and Smartphone Camera
4. Experiment and Result Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.; Al-Khalifa, H. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Zhang, Y.; Zhou, M.; Liu, Y. Pedestrian dead reckoning for MARG navigation using a smartphone. EURASIP J. Adv. Signal Process. 2014, 2014, 65. [Google Scholar] [CrossRef]
- Zhou, R. Pedestrian dead reckoning on smartphones with varying walking speed. In Proceedings of the International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; pp. 1–6. [Google Scholar]
- Racko, J.; Brida, P.; Perttula, A.; Parviainen, J.; Collin, J. Pedestrian dead reckoning with particle filter for handheld smartphone. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar]
- Kawaji, H.; Hatada, K.; Yamasaki, T.; Aizawa, K. An image-based indoor positioning for digital museum applications. In Proceedings of the International Conference on Virtual Systems and Multimedia, Seoul, Korea, 20–23 October 2010; pp. 105–111. [Google Scholar]
- Niu, Q.; Li, M.; He, S.; Gao, C.; Gary Chan, S.-H.; Luo, X. Resource-efficient and Automated Image-based Indoor Localization. ACM Trans. Sensor Netw. 2019, 15, 19. [Google Scholar] [CrossRef]
- Kawaji, H.; Hatada, K.; Yamasaki, T.; Aizawa, K. Image-based indoor positioning system: Fast image matching using omnidirectional panoramic images. In Proceedings of the 1st ACM International Workshop on Multimodal Pervasive Video Analysis, Firenze, Italy, 29 October 2010; pp. 1–4. [Google Scholar]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable slam system with full 3d motion estimation. In Proceedings of the International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Santos, J.M.; Portugal, D.; Rocha, R.P. An evaluation of 2D SLAM techniques available in robot operating system. In Proceedings of the International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linkoping, Sweden, 21–26 October 2013; pp. 1–6. [Google Scholar]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Munoz-Salinas, R.; Medina-Carnicer, R. UcoSLAM: Simultaneous Localization and Mapping by Fusion of KeyPoints and Squared Planar Markers. arXiv 2019, arXiv:1902.03729. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent advances in indoor localization: A survey on theoretical approaches and applications. IEEE Commun. Surv. Tutor. 2016, 19, 1327–1346. [Google Scholar] [CrossRef]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of indoor positioning technologies: A survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Sakpere, W.; Adeyeye-Oshin, M.; Mlitwa, N.B. A state-of-the-art survey of indoor positioning and navigation systems and technologies. S. Afr. Comput. J. 2017, 29, 145–197. [Google Scholar] [CrossRef]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Wu, Y.; Zhu, H.-B.; Du, Q.-X.; Tang, S.-M. A survey of the research status of pedestrian dead reckoning systems based on inertial sensors. Int. J. Autom. Comput. 2019, 16, 65–83. [Google Scholar] [CrossRef]
- Kim, J.W.; Jang, H.J.; Hwang, D.-H.; Park, C. A step, stride and heading determination for the pedestrian navigation system. Positioning 2004, 1. [Google Scholar] [CrossRef]
- Ho, N.-H.; Truong, P.; Jeong, G.-M. Step-detection and adaptive step-length estimation for pedestrian dead-reckoning at various walking speeds using a smartphone. Sensors 2016, 16, 423. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Chen, Y.; Shi, L.; Tian, Z.; Zhou, M.; Li, L. Accelerometer based joint step detection and adaptive step length estimation algorithm using handheld devices. J. Commun. 2015, 10, 520–525. [Google Scholar] [CrossRef][Green Version]
- Vezočnik, M.; Juric, M.B. Average Step Length Estimation Models’ Evaluation Using Inertial Sensors: A Review. IEEE Sens. J. 2018, 19, 396–403. [Google Scholar] [CrossRef]
- Díez, L.E.; Bahillo, A.; Otegui, J.; Otim, T. Step length estimation methods based on inertial sensors: A review. IEEE Sens. J. 2018, 18, 6908–6926. [Google Scholar] [CrossRef]
- Xing, H.; Li, J.; Hou, B.; Zhang, Y.; Guo, M. Pedestrian stride length estimation from IMU measurements and ANN based algorithm. J. Sens. 2017, 2017, 6091261. [Google Scholar] [CrossRef]
- Zhao, K.; Li, B.-H.; Dempster, A.G. A new approach of real time step length estimation for waist mounted PDR system. In Proceedings of the International Conference on Wireless Communication and Sensor Network, Wuhan, China, 13–14 December 2014; pp. 400–406. [Google Scholar]
- Sun, Y.; Wu, H.; Schiller, J. A step length estimation model for position tracking. In Proceedings of the International Conference on Location and GNSS (ICL-GNSS), Gothenburg, Sweden, 22–24 June 2015; pp. 1–6. [Google Scholar]
- Shiau, J.-K.; Wang, I.-C. Unscented kalman filtering for attitude determination using mems sensors. J. Appl. Sci. Eng. 2013, 16, 165–176. [Google Scholar]
- Nguyen, P.; Akiyama, T.; Ohashi, H.; Nakahara, G.; Yamasaki, K.; Hikaru, S. User-friendly heading estimation for arbitrary smartphone orientations. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar]
- Liu, D.; Pei, L.; Qian, J.; Wang, L.; Liu, P.; Dong, Z.; Xie, S.; Wei, W. A novel heading estimation algorithm for pedestrian using a smartphone without attitude constraints. In Proceedings of the International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), Shanghai, China, 2–4 November 2016; pp. 29–37. [Google Scholar]
- Jin, Y.; Toh, H.-S.; Soh, W.-S.; Wong, W.-C. A robust dead-reckoning pedestrian tracking system with low cost sensors. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications (PerCom), Seattle, WA, USA, 21–25 March 2011; pp. 222–230. [Google Scholar]
- Shin, B.; Lee, J.H.; Lee, H.; Kim, E.; Kim, J.; Lee, S.; Cho, Y.-S.; Park, S.; Lee, T. Indoor 3D pedestrian tracking algorithm based on PDR using smarthphone. In Proceedings of the International Conference on Control, Automation and Systems, JeJu Island, Korea, 17–21 October 2012; pp. 1442–1445. [Google Scholar]
- Ali, A.; El-Sheimy, N. Low-cost MEMS-based pedestrian navigation technique for GPS-denied areas. J. Sens. 2013, 2013, 197090. [Google Scholar] [CrossRef]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. Position estimation approach by complementary filter-aided IMU for indoor environment. In Proceedings of the European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 4208–4213. [Google Scholar]
- Kakiuchi, N.; Kamijo, S. Pedestrian dead reckoning for mobile phones through walking and running mode recognition. In Proceedings of the International Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 261–267. [Google Scholar]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2014, 15, 2906–2916. [Google Scholar] [CrossRef]
- Tian, Q.; Salcic, Z.; Kevin, I.; Wang, K.; Pan, Y. A multi-mode dead reckoning system for pedestrian tracking using smartphones. IEEE Sens. J. 2015, 16, 2079–2093. [Google Scholar] [CrossRef]
- Shin, B.; Kim, C.; Kim, J.; Lee, S.; Kee, C.; Kim, H.S.; Lee, T. Motion recognition-based 3D pedestrian navigation system using smartphone. IEEE Sens. J. 2016, 16, 6977–6989. [Google Scholar] [CrossRef]
- Ilkovičová, Ľ.; Kajánek, P.; Kopáčik, A. Pedestrian indoor positioning and tracking using smartphone sensors, step detection and map matching algorithm. Geod. List 2016, 1, 1–24. [Google Scholar]
- Zhang, P.; Chen, X.; Ma, X.; Wu, Y.; Jiang, H.; Fang, D.; Tang, Z.; Ma, Y. SmartMTra: Robust indoor trajectory tracing using smartphones. IEEE Sens. J. 2017, 16, 3613–3624. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.; Zhang, P.; Chen, X. Indoor positioning based on pedestrian dead reckoning and magnetic field matching for smartphones. Sensors 2018, 18, 4142. [Google Scholar] [CrossRef]
- Zhang, R.; Bannoura, A.; Höflinger, F.; Reindl, L.M.; Schindelhauer, C. Indoor localization using a smart phone. In Proceedings of the Sensors Applications Symposium, Galveston, TX, USA, 19–21 February 2013; pp. 38–42. [Google Scholar]
- Chen, Z.; Zhu, Q.; Jiang, H.; Soh, Y.C. Indoor localization using smartphone sensors and iBeacons. In Proceedings of the Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1723–1728. [Google Scholar]
- Liu, Y.; Dashti, M.; Rahman, M.A.A.; Zhang, J. Indoor localization using smartphone inertial sensors. In Proceedings of the Workshop on Positioning, Navigation and Communication (WPNC), Dresden, Germany, 12–13 March 2014; pp. 1–6. [Google Scholar]
- Shi, L.-F.; Zhao, Y.-L.; Liu, G.-X.; Chen, S.; Wang, Y.; Shi, Y.-F. A Robust Pedestrian Dead Reckoning System Using Low-Cost Magnetic and Inertial Sensors. IEEE Trans. Instrum. Meas. 2018, 68, 2996–3003. [Google Scholar] [CrossRef]
- Gu, F.; Khoshelham, K.; Yu, C.; Shang, J. Accurate Step Length Estimation for Pedestrian Dead Reckoning Localization Using Stacked Autoencoders. IEEE Trans. Instrum. Meas. 2018, 68, 2705–2713. [Google Scholar] [CrossRef]
- Ju, H.; Lee, J.H.; Park, C.G. Pedestrian Dead Reckoning System Using Dual IMU to Consider Heel Strike Impact. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS), Daegwallyeong, Korea, 17–20 October 2018; pp. 1307–1309. [Google Scholar]
- Tong, X.; Su, Y.; Li, Z.; Si, C.; Han, G.; Ning, J.; Yang, F. A Double-step Unscented Kalman Filter and HMM-based Zero Velocity Update for Pedestrian Dead Reckoning Using MEMS Sensors. IEEE Trans. Ind. Electron. 2019, 67, 581–591. [Google Scholar] [CrossRef]
- Cho, S.Y.; Park, C.G. Threshold-less Zero-Velocity Detection Algorithm for Pedestrian Dead Reckoning. In Proceedings of the European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–5. [Google Scholar]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An Indoor Position-Estimation Algorithm Using Smartphone IMU Sensor Data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Fusco, G.; Coughlan, J.M. Indoor Localization Using Computer Vision and Visual-Inertial Odometry. In Proceedings of the International Conference on Computers Helping People with Special Needs (ICCHP), Linz, Austria, 11–3 July 2018; pp. 86–93. [Google Scholar]
- Cooper, A.; Hegde, P. An indoor positioning system facilitated by computer vision. In Proceedings of the MIT Undergraduate Research Technology Conference (URTC), Cambridge, MA, USA, 4–6 November 2016; pp. 1–5. [Google Scholar]
- Xiao, A.; Chen, R.; Li, D.; Chen, Y.; Wu, D. An Indoor Positioning System Based on Static Objects in Large Indoor Scenes by Using Smartphone Cameras. Sensors 2018, 18, 2229. [Google Scholar] [CrossRef]
- Kittenberger, T.; Ferner, A.; Scheikl, R. A simple computer vision based indoor positioning system for educational micro air vehicles. J. Autom. Mob. Robot. Intell. Syst. 2014, 8, 46–52. [Google Scholar] [CrossRef]
- Carozza, L.; Tingdahl, D.; Bosché, F.; Van Gool, L. Markerless vision-based augmented reality for urban planning. Comput.-Aided Civ. Infrastruct. Eng. 2014, 29, 2–17. [Google Scholar] [CrossRef]
- Comport, A.I.; Marchand, E.; Pressigout, M.; Chaumette, F. Real-time markerless tracking for augmented reality: The virtual visual servoing framework. IEEE Trans. Vis. Comput. Graph. 2006, 12, 615–628. [Google Scholar] [CrossRef] [PubMed]
- Goedemé, T.; Nuttin, M.; Tuytelaars, T.; Van Gool, L. Markerless computer vision based localization using automatically generated topological maps. In Proceedings of the European Navigation Conference GNSS, Rotterdam, The Netherlands, 16–19 May 2004; pp. 219–236. [Google Scholar]
- Comport, A.I.; Marchand, É.; Chaumette, F. A real-time tracker for markerless augmented reality. In Proceedings of the 2nd IEEE/ACM International Symposium on Mixed and Augmented Reality, Tokyo, Japan, 10 October 2003; pp. 36–45. [Google Scholar]
- Colyer, S.L.; Evans, M.; Cosker, D.P.; Salo, A.I. A review of the evolution of vision-based motion analysis and the integration of advanced computer vision methods towards developing a markerless system. Sports Med.-Open 2018, 4, 24. [Google Scholar] [CrossRef] [PubMed]
- Mutka, A.; Miklic, D.; Draganjac, I.; Bogdan, S. A low cost vision based localization system using fiducial markers. IFAC Proc. Vol. 2008, 41, 9528–9533. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, S.; Yu, Y.; Wang, Z. An improved graph-based visual localization system for indoor mobile robot using newly designed markers. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Khairuddin, A.R.; Talib, M.S.; Haron, H. Review on simultaneous localization and mapping (SLAM). In Proceedings of the International Conference on Control System, Computing and Engineering (ICCSCE), George Town, Malaysia, 27–29 November 2015; pp. 85–90. [Google Scholar]
- Kuzmin, M. Review, Classification and Comparison of the Existing SLAM Methods for Groups of Robots. In Proceedings of the 22st Conference of Open Innovations Association (FRUCT), Jyvaskyla, Finland, 15–18 May 2018; pp. 115–120. [Google Scholar]
- Saeedi, S.; Trentini, M.; Seto, M.; Li, H. Multiple-robot simultaneous localization and mapping: A review. J. Field Robot. 2016, 33, 3–46. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans Comput. Vis. Appl. 2017, 9, 16. [Google Scholar] [CrossRef]
- Hwang, S.-Y.; Song, J.-B. Clustering and probabilistic matching of arbitrarily shaped ceiling features for monocular vision-based SLAM. Adv. Robot. 2013, 27, 739–747. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Montemerlo, M.; Thrun, S. Simultaneous localization and mapping with unknown data association using FastSLAM. In Proceedings of the International Conference on Robotics and Automation (Cat. No. 03CH37422), Aipei, Taiwan, 14–19 September 2003; pp. 1985–1991. [Google Scholar]
- Zikos, N.; Petridis, V. L-SLAM: Reduced dimensionality FastSLAM with unknown data association. In Proceedings of the International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4074–4079. [Google Scholar]
- Doaa, M.-L.; Mohammed, A.; Megeed Salem, H.R.; Mohamed, I.R. 3D Graph-based Vision-SLAM Registration and Optimization. Int. J. Circuits Syst. Signal Process. 2014, 8, 123–130. [Google Scholar]
- Gil, A.; Juliá, M.; Reinoso, Ó. Occupancy grid based graph-SLAM using the distance transform, SURF features and SGD. Eng. Appl. Artif. Intell. 2015, 40, 1–10. [Google Scholar] [CrossRef]
- Ozisik, O.; Yavuz, S. An occupancy grid based SLAM method. In Proceedings of the International Conference on Computational Intelligence for Measurement Systems and Applications, Istanbul, Turkey, 14–16 July 2008; pp. 117–119. [Google Scholar]
- Asmar, D.; Shaker, S. 2 D occupancy-grid SLAM of structured indoor environments using a single camera. Int. J. Mechatron. Autom. 2012, 2, 112–124. [Google Scholar] [CrossRef]
- Eliazar, A.; Parr, R. DP-SLAM: Fast, robust simultaneous localization and mapping without predetermined landmarks. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), Acapulco, Mexico, 9–15 August 2003; pp. 1135–1142. [Google Scholar]
- Klein, G.; Murray, D. Parallel tracking and mapping for small AR workspaces. In Proceedings of the ACM International Symposium on Mixed and Augmented Reality, Nara, Japan, 13–16 November 2007; pp. 1–10. [Google Scholar]
- Pire, T.; Fischer, T.; Castro, G.; De Cristóforis, P.; Civera, J.; Berlles, J.J. S-PTAM: Stereo parallel tracking and mapping. Robot. Auton. Syst. 2017, 93, 27–42. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Lovegrove, S.J.; Davison, A.J. DTAM: Dense tracking and mapping in real-time. In Proceedings of the International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2320–2327. [Google Scholar]
- Gupta, T.; Shin, D.; Sivagnanadasan, N.; Hoiem, D. 3dfs: Deformable dense depth fusion and segmentation for object reconstruction from a handheld camera. arXiv 2016, arXiv:1606.05002. [Google Scholar]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental smoothing and mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLA. In Proceedings of the European Conference on Computer Vision (ECCV), Zürich, Switzerland, 6–12 September 2014; pp. 834–849. [Google Scholar]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-time single camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef]
- Zou, D.; Tan, P. Coslam: Collaborative visual slam in dynamic environments. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 354–366. [Google Scholar] [CrossRef]
- Milford, M.J.; Wyeth, G.F. SeqSLAM: Visual route-based navigation for sunny summer days and stormy winter nights. In Proceedings of the International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1643–1649. [Google Scholar]
- Bosse, M.; Zlot, R. Continuous 3D scan-matching with a spinning 2D laser. In Proceedings of the International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4312–4319. [Google Scholar]
- Shen, X.; Min, H.; Lin, Y. Fast RGBD-ICP with bionic vision depth perception model. In Proceedings of the International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1241–1246. [Google Scholar]
- Mur-Artal, R.; Tardós, J.D. Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras. IEEE Trans. Robot. 2017, 33, 1255–1262. [Google Scholar] [CrossRef]
- Andersson, M.; Baerveldt, M. Simultaneous Localization and Mapping for Vehicles Using ORB-SLAM2. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, May 2018. [Google Scholar]
- Mur-Artal, R.; Tardós, J.D. Probabilistic Semi-Dense Mapping from Highly Accurate Feature-Based Monocular SLAM. In Proceedings of the Robotics: Science and Systems, Rome, Italy, 13–17 July 2015. [Google Scholar]
- Bacik, J.; Durovsky, F.; Fedor, P.; Perdukova, D. Autonomous flying with quadrocopter using fuzzy control and ArUco markers. Intell. Serv. Robot. 2017, 10, 1861–2776. [Google Scholar] [CrossRef]
- Robot Operating System. Available online: http://www.ros.org/ (accessed on 17 May 2019).
- Sanchez-Lopez, J.L.; Arellano-Quintana, V.; Tognon, M.; Campoy, P.; Franchi, A. Visual Marker based Multi-Sensor Fusion State Estimation. In Proceedings of the 20th IFACWorld Congress, Toulouse, France, 13–16 July 2017; pp. 16003–16008. [Google Scholar]
- Muoz-Salinas, R.; Medina-Carnicer, R.; Marín-Jimenez, M.J.; Yeguas-Bolivar, E. Mapping and Localization from Planar Markers. Pattern Recognit. 2017, 73, 158–171. [Google Scholar] [CrossRef]
- You, S.; Neumann, U. Fusion of vision and gyro tracking for robust augmented reality registration. In Proceedings of the IEEE Virtual Reality 2001, Yokohama, Japan, 13–17 March 2001; pp. 71–78. [Google Scholar]
- Tao, Y.; Hu, H.; Zhou, H. Integration of vision and inertial sensors for 3D arm motion tracking in home-based rehabilitation. Int. J. Robot. Res. 2007, 26, 607–624. [Google Scholar] [CrossRef]
- Hol, J.D.; Schön, T.B.; Gustafsson, F. Modeling and calibration of inertial and vision sensors. Int. J. Robot. Res. 2010, 29, 231–244. [Google Scholar] [CrossRef]
- Park, J.; Hwang, W.; Kwon, H.-I.; Kim, J.-H.; Lee, C.-H.; Anjum, M.L.; Kim, K.-S.; Cho, D.-I. High performance vision tracking system for mobile robot using sensor data fusion with kalman filter. In Proceedings of the International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3778–3783. [Google Scholar]
- Aubeck, F.; Isert, C.; Gusenbauer, D. Camera based step detection on mobile phones. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Kumar, K.; Varghese, A.; Reddy, P.K.; Narendra, N.; Swamy, P.; Chandra, M.G.; Balamuralidhar, P. An improved tracking using IMU and Vision fusion for Mobile Augmented Reality applications. arXiv 2014, arXiv:1411.2335. [Google Scholar] [CrossRef]
- Erdem, A.T.; Ercan, A.Ö. Fusing inertial sensor data in an extended Kalman filter for 3D camera tracking. IEEE Trans. Image Process. 2014, 24, 538–548. [Google Scholar] [CrossRef]
- Delaune, J.; Le Besnerais, G.; Voirin, T.; Farges, J.-L.; Bourdarias, C. Visual-inertial navigation for pinpoint planetary landing using scale-based landmark matching. Robot. Auton. Syst. 2016, 78, 63–82. [Google Scholar] [CrossRef]
- Li, J.; Besada, J.A.; Bernardos, A.M.; Tarrío, P.; Casar, J.R. A novel system for object pose estimation using fused vision and inertial data. Inf. Fusion 2017, 33, 15–28. [Google Scholar] [CrossRef]
- Chroust, S.G.; Vincze, M. Fusion of vision and inertial data for motion and structure estimation. J. Robot. Syst. 2004, 21, 73–83. [Google Scholar] [CrossRef]
- Elloumi, W.; Latoui, A.; Canals, R.; Chetouani, A.; Treuillet, S. Indoor pedestrian localization with a smartphone: A comparison of inertial and vision-based methods. IEEE Sens. J. 2016, 16, 5376–5388. [Google Scholar] [CrossRef]
- Alatise, M.; Hancke, G. Pose estimation of a mobile robot based on fusion of IMU data and vision data using an extended Kalman filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Chen, R.; Li, D.; Chen, Y.; Guo, G.; Cao, Z.; Pan, Y. Scene recognition for indoor localization using a multi-sensor fusion approach. Sensors 2017, 17, 2847. [Google Scholar] [CrossRef] [PubMed]
- Guo, X.; Sun, C.; Wang, P.; Huang, L. Vision sensor and dual MEMS gyroscope integrated system for attitude determination on moving base. Rev. Sci. Instrum. 2018, 89, 015002. [Google Scholar] [CrossRef]
- Farnoosh, A.; Nabian, M.; Closas, P.; Ostadabbas, S. First-person indoor navigation via vision-inertial data fusion. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 1213–1222. [Google Scholar]
- Yan, J.; He, G.; Basiri, A.; Hancock, C. 3D Passive-Vision-Aided Pedestrian Dead Reckoning for Indoor Positioning. IEEE Trans. Instrum. Meas. 2019. [Google Scholar] [CrossRef]
- Huang, G. Visual-inertial navigation: A concise review. arXiv 2019, arXiv:1906.02650. [Google Scholar]
- Wu, Y.; Tang, F.; Li, H. Image-based camera localization: An overview. Vis. Comput. Ind. Biomed. Art 2018, 1, 1–13. [Google Scholar] [CrossRef]
- Ligorio, G.; Sabatini, A. Extended Kalman filter-based methods for pose estimation using visual, inertial and magnetic sensors: Comparative analysis and performance evaluation. Sensors 2013, 13, 1919–1941. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, J.; Tan, J. Adaptive-frame-rate monocular vision and imu fusion for robust indoor positioning. In Proceedings of the International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2257–2262. [Google Scholar]
- Nilsson, J.; Fredriksson, J.; Ödblom, A.C. Reliable vehicle pose estimation using vision and a single-track model. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2630–2643. [Google Scholar] [CrossRef]
- Fox, D.; Thrun, S.; Burgard, W.; Dellaert, F. Particle Filters for Mobile Robot Localization; Sequential Monte Carlo Methods in Practice; Springer Science & Business Media: New York, NY, USA, 2001; pp. 401–428. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No. 00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G.R. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the European conference on computer vision, Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Munoz-Salinas, R.; Marin-Jimenez, M.J.; Medina-Carnicer, R. SPM-SLAM: Simultaneous localization and mapping with squared planar markers. Pattern Recognit. 2019, 86, 156–171. [Google Scholar] [CrossRef]
- Gálvez-López, D.; Tardos, J.D. Bags of binary words for fast place recognition in image sequences. IEEE Trans. Robot. 2012, 28, 1188–1197. [Google Scholar] [CrossRef]
- Xing, B.; Zhu, Q.; Pan, F.; Feng, X. Marker-Based Multi-Sensor Fusion Indoor Localization System for Micro Air Vehicles. Sensors 2018, 18, 1706. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Estimated State Vector | |
| Estimated state covariance | |
| Process noise | |
| Measurement noise covariance matrix | |
| Kalman gain matrix | |
| Measurement | |
| A | State-transition matrixt |
| B | Controlled input matrix |
| H | Observation model |
| For internal computation |
| Localization Method | Mean Error (m) | Max. Error (m) | Min. Error (m) | Standard Deviation of Error (m) |
|---|---|---|---|---|
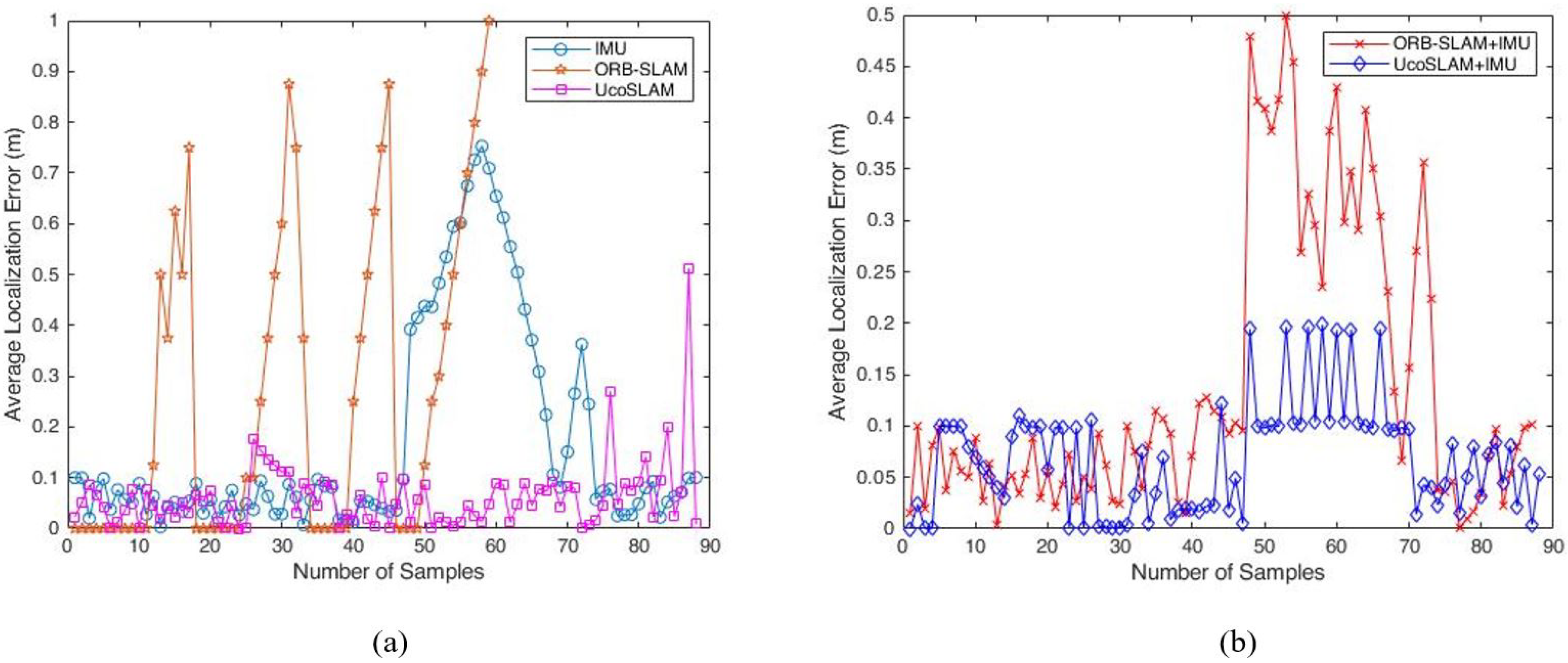
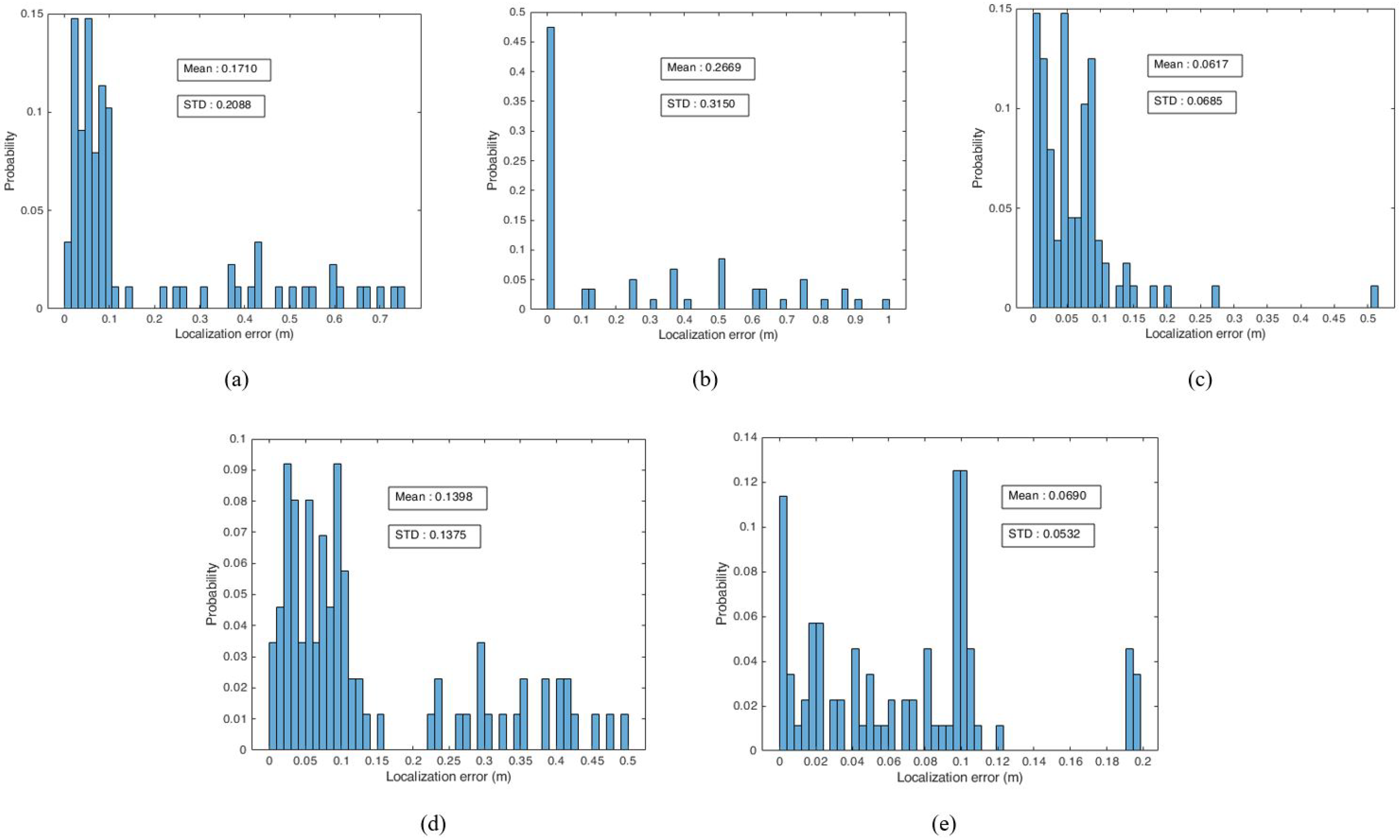
| IMU | 0.1710 | 0.7528 | 0.0031 | 0.2088 |
| ORB-SLAM | 0.2669 | 1 | 0 | 0.3150 |
| UcoSLAM | 0.0617 | 0.5120 | 0 | 0.0685 |
| ORB-SLAM + IMU | 0.1398 | 0.4996 | 0.0011 | 0.1375 |
| UcoSLAM + IMU | 0.0690 | 0.1985 | 0 | 0.0532 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poulose, A.; Han, D.S. Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera. Sensors 2019, 19, 5084. https://doi.org/10.3390/s19235084
Poulose A, Han DS. Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera. Sensors. 2019; 19(23):5084. https://doi.org/10.3390/s19235084
Chicago/Turabian StylePoulose, Alwin, and Dong Seog Han. 2019. "Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera" Sensors 19, no. 23: 5084. https://doi.org/10.3390/s19235084
APA StylePoulose, A., & Han, D. S. (2019). Hybrid Indoor Localization Using IMU Sensors and Smartphone Camera. Sensors, 19(23), 5084. https://doi.org/10.3390/s19235084