Tag Localization with Asynchronous Inertial-Based Shifting and Trilateration



Abstract
:1. Introduction
- -
- utilize tags’ memory to store reader detection information and location information that can be read by other passing readers, and
- -
- use asynchronous detection information and internal inertial sensor information to enhance localization when the concurrent spatial information is not sufficient to localize a tag.
2. Related Work and Motivation
3. System Model
3.1. System Architecture
3.2. Ranging Model
3.3. Inertial Sensor Model
4. Proposed Solution
4.1. Crowdsourcing Scheme
- Detections table, shown in Table 1, contains temporal and spatial information about a tag with respect to reader . Such information is considered the raw information about a tag’s vicinity to a specific reader at a given time. The number of entries in Detections table is denoted by k.
- Absolute Tag Location (ATL) table, shown in Table 2, contains the estimated locations of a tag . Each location is identified by its estimation time.
- Tag Displacement Vector (TDV) table contains the distance vectors that are measured based on inertial sensors (IS) records. TDV contains k − 1 tag displacement vectors between every two subsequent reader detections.
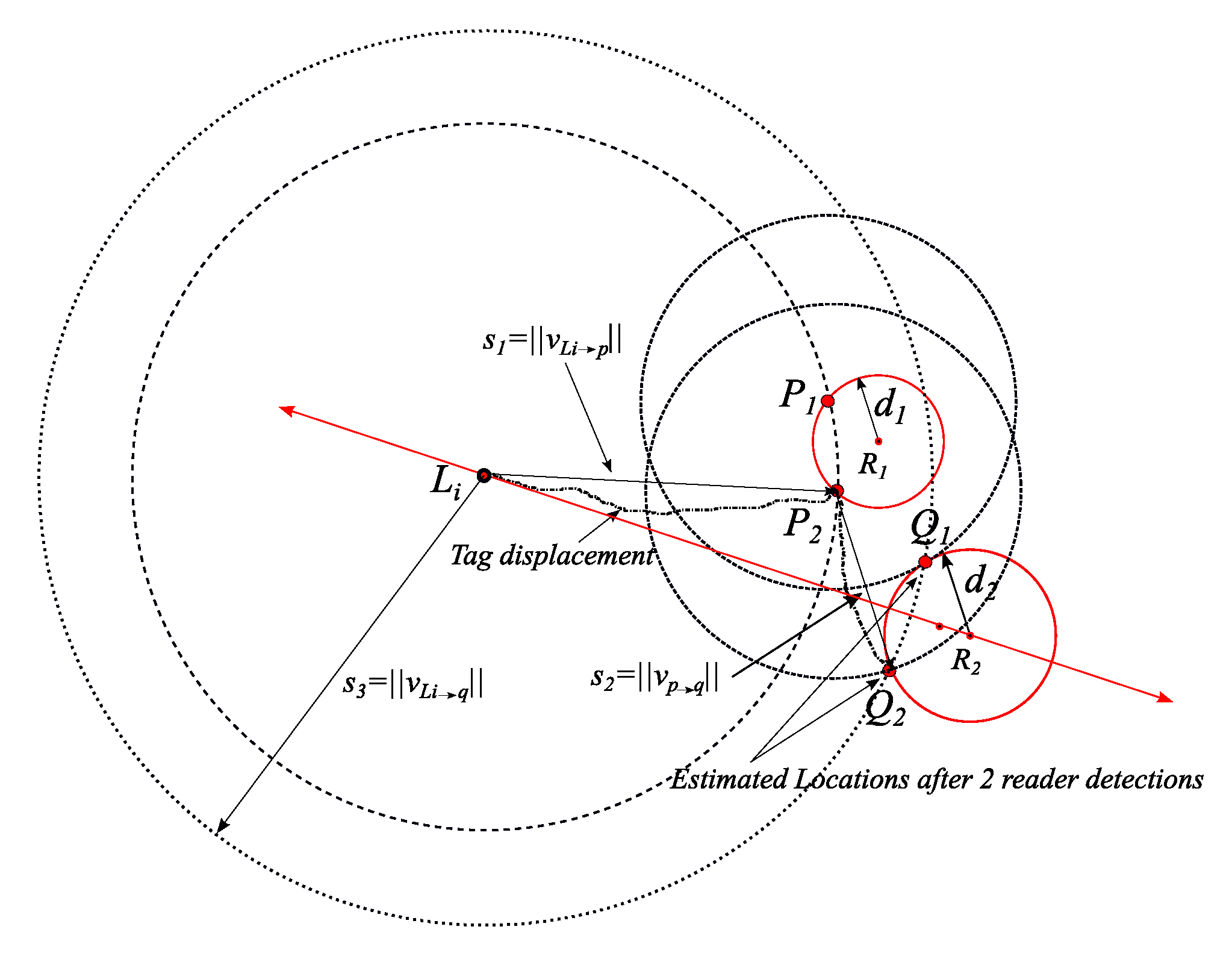
4.2. Inertial-Based Shifting Trilateration (IBST) Technique
4.3. IBST Process
4.4. IBST Algorithm with Ideal Inertial-Magnetic and Range Readings
| Algorithm I. Ideal Inertial-Based Shifting Trilateration. |
| Input: Asynchronous readers’ detections, raw inertial sensor data |
| Output: Updated Absolute Tag Location (ATL) |
| 1: initialize tag memory: empty Detections, IS, TDV, and ATL tables |
| 2: while (tag is not detected) |
| 3: Do record data from inertial sensors in IS table |
| 4: End While |
| 5: Read Detections and IS tables // a tag is detected |
| 6: Update Detections table with |
| 7: If (Detections table has k > 0 entries) |
| 8: Calculate displacement vector(s) based on IS table |
| 9: End If |
| 10: If (Detections table has k = 2) // check for enough detections to perform trilateration |
| 11: = Circle around coordinates in by a radius of |
| 12: = Circle around coordinates in by a radius of |
| 13: = the circle around the current reader by a radius of RSSI mapped detection range |
| 14: Calculate the current absolute tag location by trilateration of and |
| 15: Delete and ; // delete first entry in Detections and TDV tables |
| 16: If (solution is unique) |
| 17: Report current ATL (ATLi) to a central database server |
| 18: Update ATL table; go to 2 // add the new ATL to previous ATL entries |
| 19: Else |
| 20: go to 2 |
| 21: End If |
| 22: Else (Detections table has k = 1) |
| 23: = Circle around coordinates in by a radius of |
| 24: = the circle around the current reader by a radius of RSSI mapped detection range |
| 25: Calculate the current absolute tag location(s) by intersecting and |
| 26: Else |
| 27: Update Detections table with and TDV table with , go to 2 |
| 28: End If |
4.5. IBST Algorithm with Incorporated Errors in Inertial and Range Readings
- Circle with its center at the second latest ATL(s) and radius of ,
- Circle with its center at latest (i.e., most recent) ATL(s) and radius of , and
- Circle with its center at the reader and radius of .
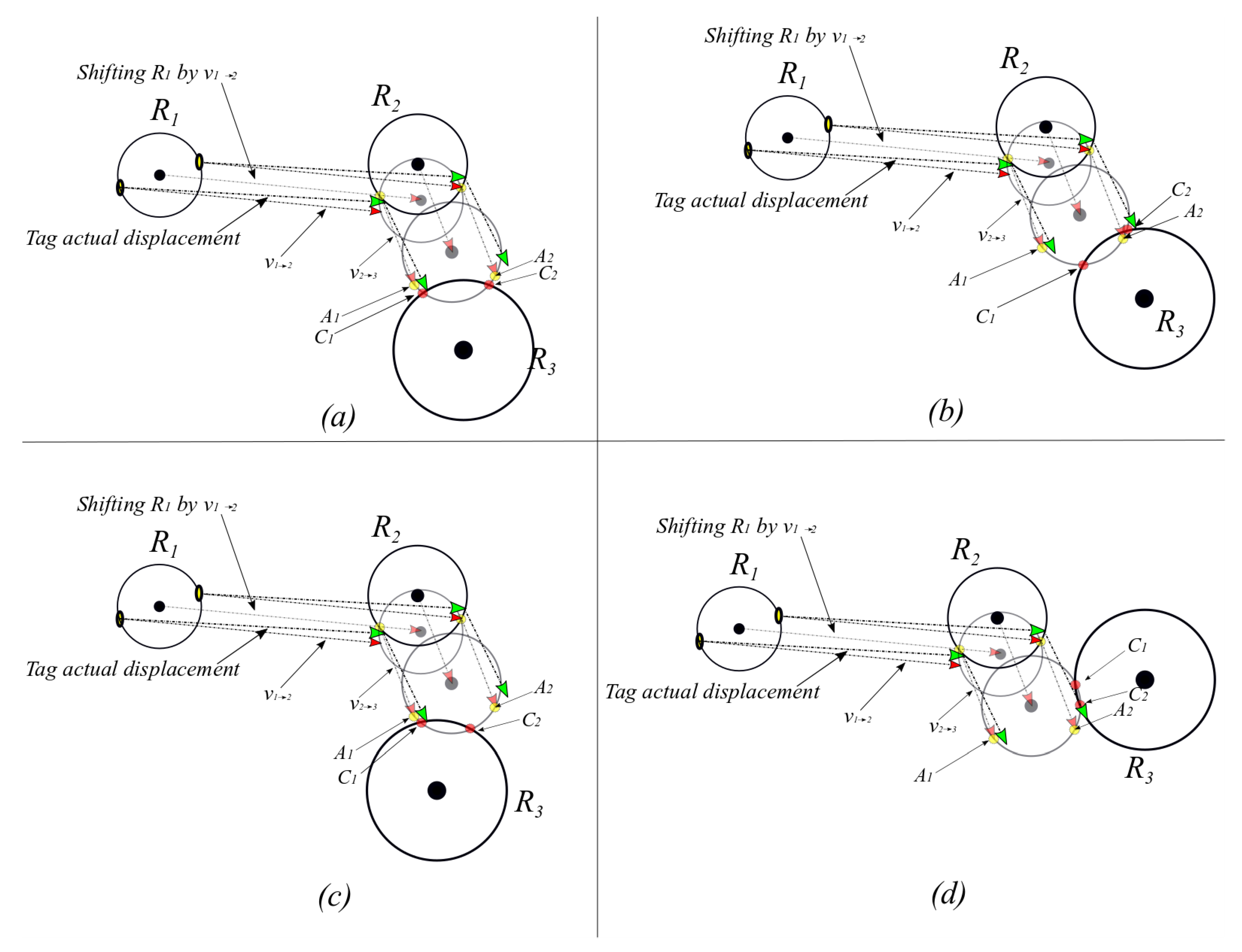
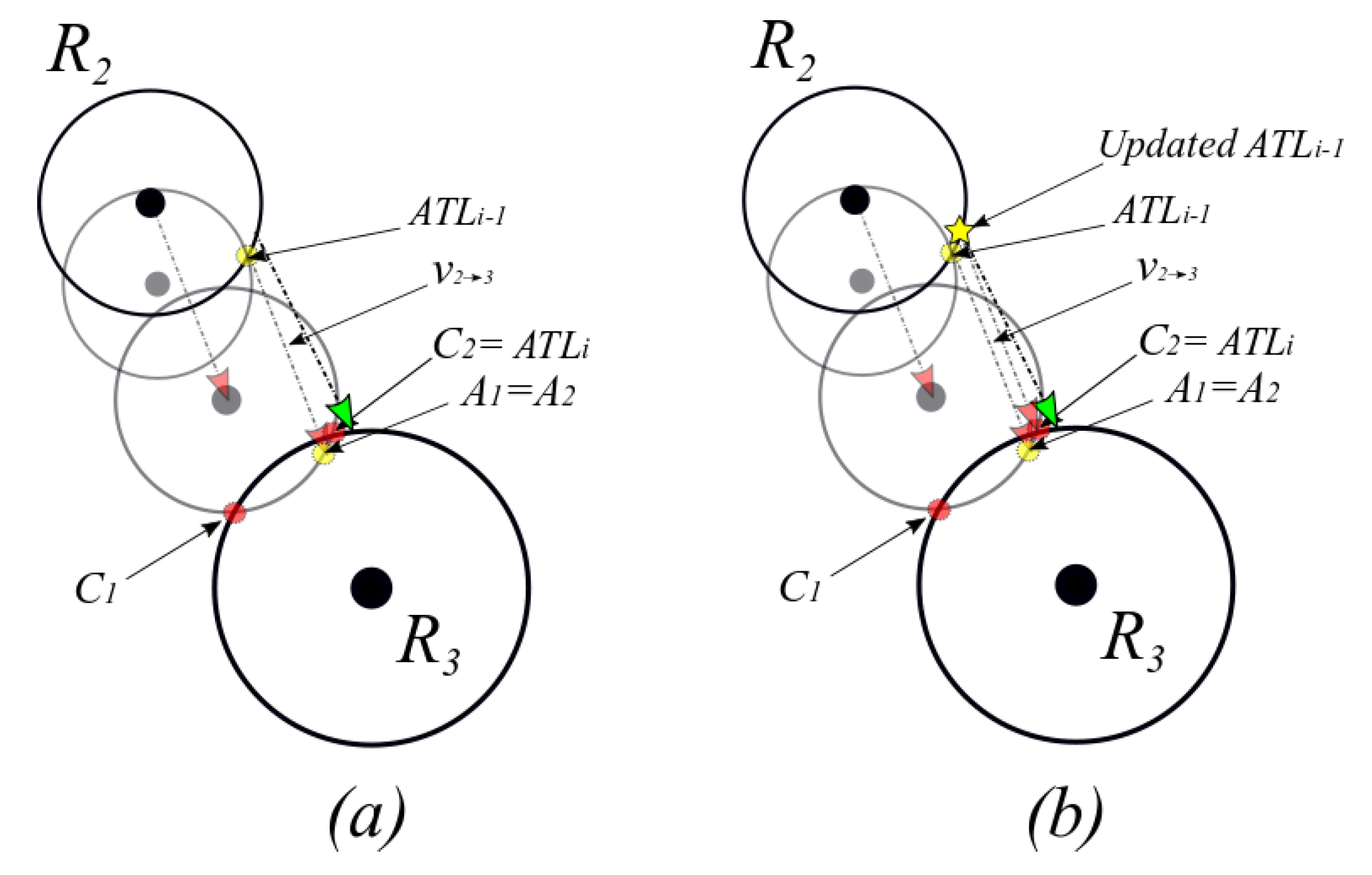
- intersects with one of the circles (e.g., as shown in Figure 5). In this case, will be calculated for all ’s on and ’s on . Then, with will be considered .
- intersects with two circles (e.g., and circles shown in Figure 6). In this case, will be calculated for all ’s on and ’s on . Then with will be considered . Similarly, will be calculated for all ’s on and ’s on . Then, with will be considered . Since two points result from the intersection of such a case, and replace and .
- does not intersect with any of circles as shown in Figure 7. is considered the intersection point between and the line which connects A with the minimum distance to the reader .
| Algorithm II. Inertial-Based Shifting Trilateration. |
| Input: Asynchronous readers’ detections, raw inertial sensor data |
| Output: Updated Absolute Tag Location (ATL) |
| 1: initialize tag memory: empty Detections, IS, TDV |
| 2: while (tag is not detected) |
| 3: Do record data from inertial sensors in IS table |
| 4: End While |
| 5: Read Detections, IS, and TDV tables // a tag is detected |
| 6: Update Detections table with current detection |
| 7: If (Detections table has 2 entries) |
| 8: Calculate displacement vector(s) based on IS table |
| 9: = Circle around coordinates in by a radius of |
| 10: = the circle around the current reader by a radius of RSSI mapped detection range |
| 11: Calculate the set of intersection points between and |
| 12: All intersection points are reported to a central server as |
| 13: Else if (Detections table has 3 entries) // check for enough detections to perform IBST |
| 14: Calculate displacement vector(s) based on IS table |
| 15: = Circle around coordinates in by a radius of |
| 16: = Circle around coordinates in by a radius of |
| 17: = the circle around the current reader by a radius of RSSI mapped detection range |
| 18: Calculate the set of intersection points A’s between and |
| 19: Calculate the set of intersection points B’s between and |
| 20: If (there are 2 intersections between and ) |
| 21: = of min , |
| 22: Else if (there are 4 intersections between and ) |
| 23: = of min , |
| 24: = of min , |
| 25: Update Detections table with and TDV table with , go to 2 |
| 26: Else (there is no intersection between and ) |
| 27: Find vector from find for =1 to 4 |
| 28: = of min , |
| 29: End if |
| 30: Report ATLi to a central database server |
| 31: Update Detections table with and TDV table with , go to 2 |
| 32: Else |
| 33: go to 2 |
| 34: End If |
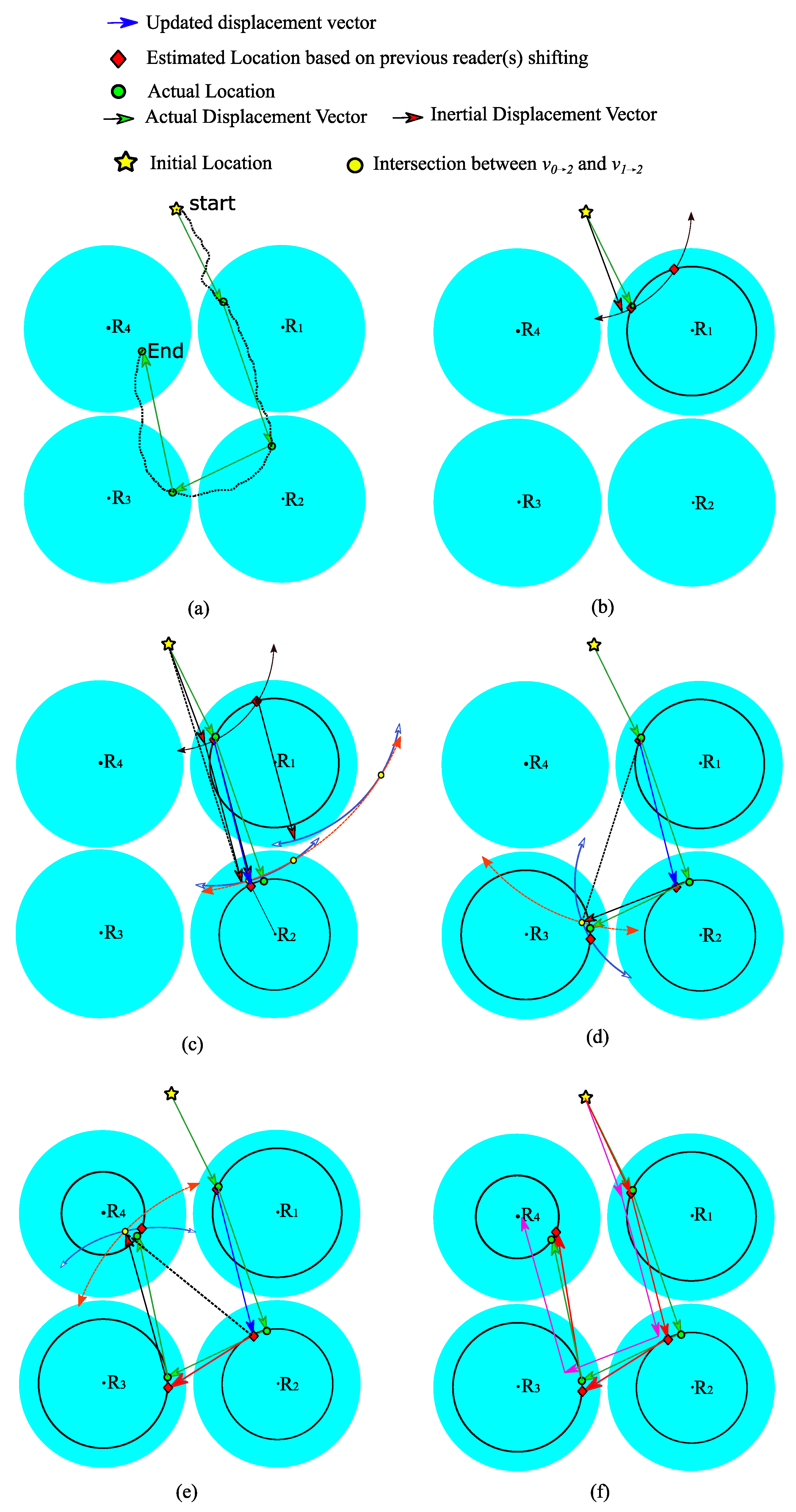
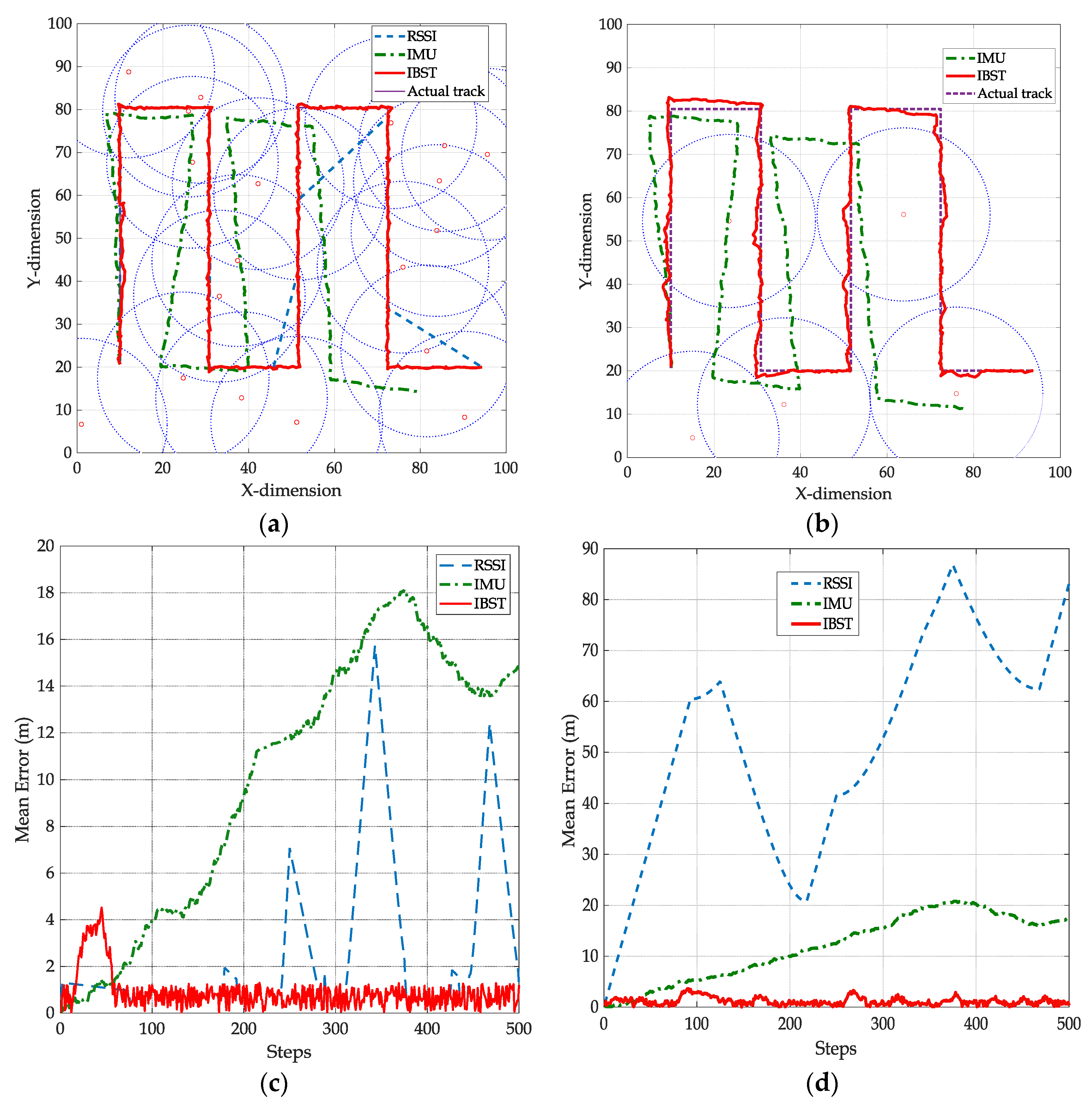
5. Performance Evaluation
5.1. Simulation Environment and Parameter Setting
5.2. Simulation Results
- (a)
- 5, 10, 20 readers
- (b)
- 5, 20 m reader ranges
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Miorandi, D.; Sicari, S.; De Pellegrini, F.; Chlamtac, I. Internet of things: Vision, applications and research challenges. Ad Hoc Netw. 2012, 10, 1497–1516. [Google Scholar] [CrossRef]
- Welbourne, E. Building the Internet of Things Using RFID: The RFID Ecosystem Experience. IEEE Internet Comput. 2009, 13, 48–55. [Google Scholar] [CrossRef]
- Han, S.; Lim, H.; Lee, J. An Efficient Localization Scheme for a Differential-Driving Mobile Robot Based on RFID System. IEEE Trans. Ind. Electron. 2007, 54, 3362–3369. [Google Scholar] [CrossRef]
- Wang, C.; Wu, H.; Tzeng, N.F. RFID-based 3-D positioning schemes. In Proceedings of the 26th IEEE International Conference on Computer Communications, Barcelona, Spain, 6–12 May 2007. [Google Scholar]
- Zhu, W.; Cao, J.; Xu, Y.; Yang, L.; Kong, J. Fault-tolerant RFID reader localization based on passive RFID tags. IEEE Trans. Parallel Distrib. Syst. 2012, 25, 2183–2191. [Google Scholar] [CrossRef]
- Cai, S.; Liao, W.; Luo, C.; Li, M.; Huang, X.; Li, P. CRIL: An Efficient Online Adaptive Indoor Localization System. IEEE Trans. Veh. Technol. 2016, 66, 4148–4160. [Google Scholar] [CrossRef]
- Wu, X.; Shen, R.; Fu, L.; Tian, X.; Liu, P.; Wang, X. iBILL: Using iBeacon and Inertial Sensors for Accurate Indoor Localization in Large Open Areas. IEEE Access 2017, 5, 14589–14599. [Google Scholar] [CrossRef]
- Tiwari, S.; Jain, V.K. HILS: Hybrid indoor localisation system using Wi-Fi received signal strength and inertial sensor’s measurements of smart-phone. IET Commun. 2019, 13, 1595–1606. [Google Scholar] [CrossRef]
- Shen, L.; Zhang, Q.; Pang, J.; Xu, H.; Li, P.; Xue, D. ANTspin: Efficient Absolute Localization Method of RFID Tags via Spinning Antenna. Sensors 2019, 19, 2194. [Google Scholar] [CrossRef] [PubMed]
- Passafiume, M.; Maddio, S.; Cidronali, A. An Improved Approach for RSSI-Based only Calibration-Free Real-Time Indoor Localization on IEEE 802.11 and 802.15.4 Wireless Networks. Sensors 2017, 17, 717. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Liu, J.; Du, X.; Li, B.; Guizani, M. AOA-Based Three-Dimensional Multi-Target Localization in Industrial WSNs for LOS Conditions. Sensors 2018, 18, 2727. [Google Scholar] [CrossRef] [PubMed]
- Junyi, Z.; Jing, S. RFID localization algorithms and applications—A review. J. Intell. Manuf. 2009, 20, 695–707. [Google Scholar]
- Ciuonzo, D.; Rossi, P.S.; Willett, P. Generalized Rao Test for Decentralized Detection of an Uncooperative Target. IEEE Signal Process. Lett. 2017, 24, 678–682. [Google Scholar] [CrossRef]
- IEEE Draft Standard for Low-Rate Wireless Networks Amendment for a Low Power Wide Area Network (LPWAN) Extension to the Low Energy Critical Infrastructure Monitoring (LECIM) Physical layer (PHY); IEEE P802.15.4w/D5; IEEE: New York, NY, USA, 2019.
- EPC/RFID. Available online: https://www.gs1.org/standards/epc-rfid (accessed on 24 November 2019).
- IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems Local and Metropolitan Area Networks—Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE Std 802.11-2012 (Revision of IEEE Std 802.11-2007); IEEE: New York, NY, USA, 2012.
- Woodman, O.J. An Introduction to Inertial Navigation; No. UCAMCL-TR-696; Computer Laboratory, University of Cambridge: Cambridge, UK, 2007. [Google Scholar]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Zhang, Z.-Q.; Meng, X. Use of an Inertial/Magnetic Sensor Module for Pedestrian Tracking During Normal Walking. IEEE Trans. Instrum. Meas. 2014, 64, 776–783. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Description |
|---|---|
| time | The time at which a Reader Rm detects tag Tn and creates the detection record. |
| position | The 2D position of the Reader Rm at time of detection is represented by relative x, y coordinates. |
| distance | The tag to Reader distance, measured using RSSI. |
| Field | Description |
|---|---|
| time | The time at which a Reader Rm estimates the location of tag Tn based on the tag’s detection information. |
| location | The estimated location of Tn, is represented by x, y coordinates. |
| Reader Range ↓ | Readers Number ↓ | Location Estimation Method → | RSSI | IMU | IBST |
|---|---|---|---|---|---|
| 5 m | 5 | Mean Error | 31.9257 | 11.3720 | 5.5248 |
| 0.0000 | 1.5261 | 2.6642 | |||
| 10 | Mean Error | 31.9257 | 11.2789 | 3.0226 | |
| 0.0000 | 1.6527 | 1.9542 | |||
| 20 | Mean Error | 31.8937 | 11.1036 | 2.2547 | |
| 0.2023 | 1.1713 | 1.0244 | |||
| 20 m | 5 | Mean Error | 31.3701 | 10.8083 | 2.3412 |
| 1.4106 | 1.5968 | 0.7357 | |||
| 10 | Mean Error | 25.2819 | 11.3305 | 1.8249 | |
| 5.7351 | 1.4866 | 0.5001 | |||
| 20 | Mean Error | 6.4204 | 11.6785 | 1.3353 | |
| 4.2260 | 2.1599 | 0.2438 |
| Reader Range ↓ | Readers Number ↓ | Location Estimation Method → | RSSI | IMU | IBST |
|---|---|---|---|---|---|
| 5 m | 5 | Mean Error | 51.7140 | 10.2056 | 6.3736 |
| 0.0002 | 1.5320 | 2.8419 | |||
| 10 | Mean Error | 51.6840 | 9.6237 | 4.0300 | |
| 0.0005 | 1.0847 | 1.1185 | |||
| 20 | Mean Error | 49.4478 | 10.2517 | 3.5279 | |
| 8.0887 | 1.5405 | 1.5634 | |||
| 20 m | 5 | Mean Error | 39.5628 | 9.5347 | 2.0329 |
| 14.9362 | 1.6884 | 0.9439 | |||
| 10 | Mean Error | 18.2600 | 10.0687 | 1.8215 | |
| 4.9584 | 1.4449 | 0.4552 | |||
| 20 | Mean Error | 5.7765 | 10.1530 | 1.6174 | |
| 4.7883 | 1.4679 | 0.1680 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alma’aitah, A.Y.; Eslim, L.M.; Hassanein, H.S. Tag Localization with Asynchronous Inertial-Based Shifting and Trilateration. Sensors 2019, 19, 5204. https://doi.org/10.3390/s19235204
Alma’aitah AY, Eslim LM, Hassanein HS. Tag Localization with Asynchronous Inertial-Based Shifting and Trilateration. Sensors. 2019; 19(23):5204. https://doi.org/10.3390/s19235204
Chicago/Turabian StyleAlma’aitah, Abdallah Y., Lobna M. Eslim, and Hossam S. Hassanein. 2019. "Tag Localization with Asynchronous Inertial-Based Shifting and Trilateration" Sensors 19, no. 23: 5204. https://doi.org/10.3390/s19235204
APA StyleAlma’aitah, A. Y., Eslim, L. M., & Hassanein, H. S. (2019). Tag Localization with Asynchronous Inertial-Based Shifting and Trilateration. Sensors, 19(23), 5204. https://doi.org/10.3390/s19235204