Advanced Autonomous Underwater Vehicles Attitude Control with
L
1
Backstepping Adaptive Control Strategy


Abstract
:1. Introduction
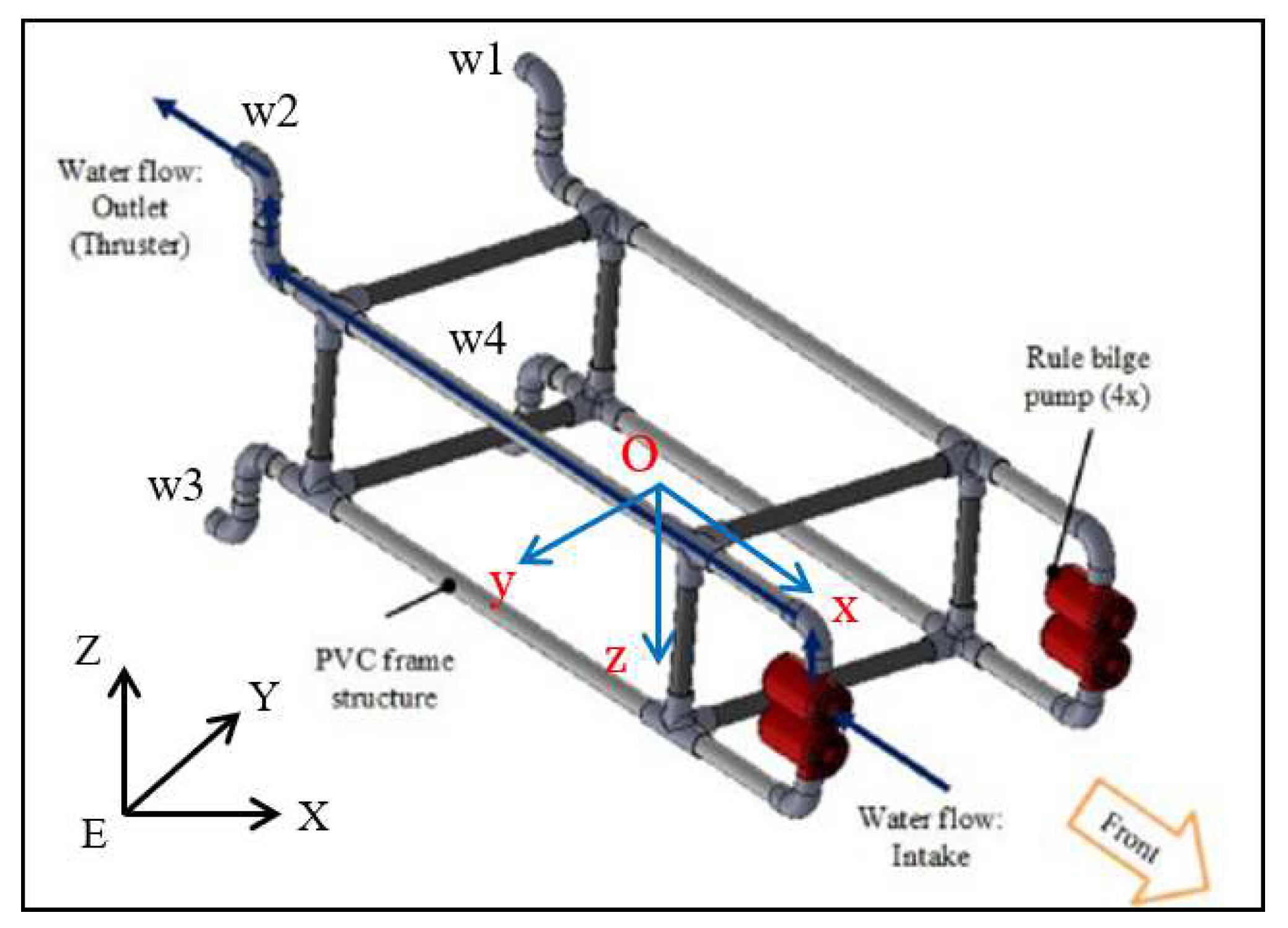
2. AUV Mechanical Design
3. Problem Formulation and Control Objective
3.1. Kinematics and Dynamics of Attitude
3.2. The Trimmed Model for Pitch and Yaw Dynamics
3.3. Control Objective
4. Controller Design
4.1. State Predictor
4.2. Adaptive Law
4.3. Backstepping Euler Angle Controller
5. Analysis
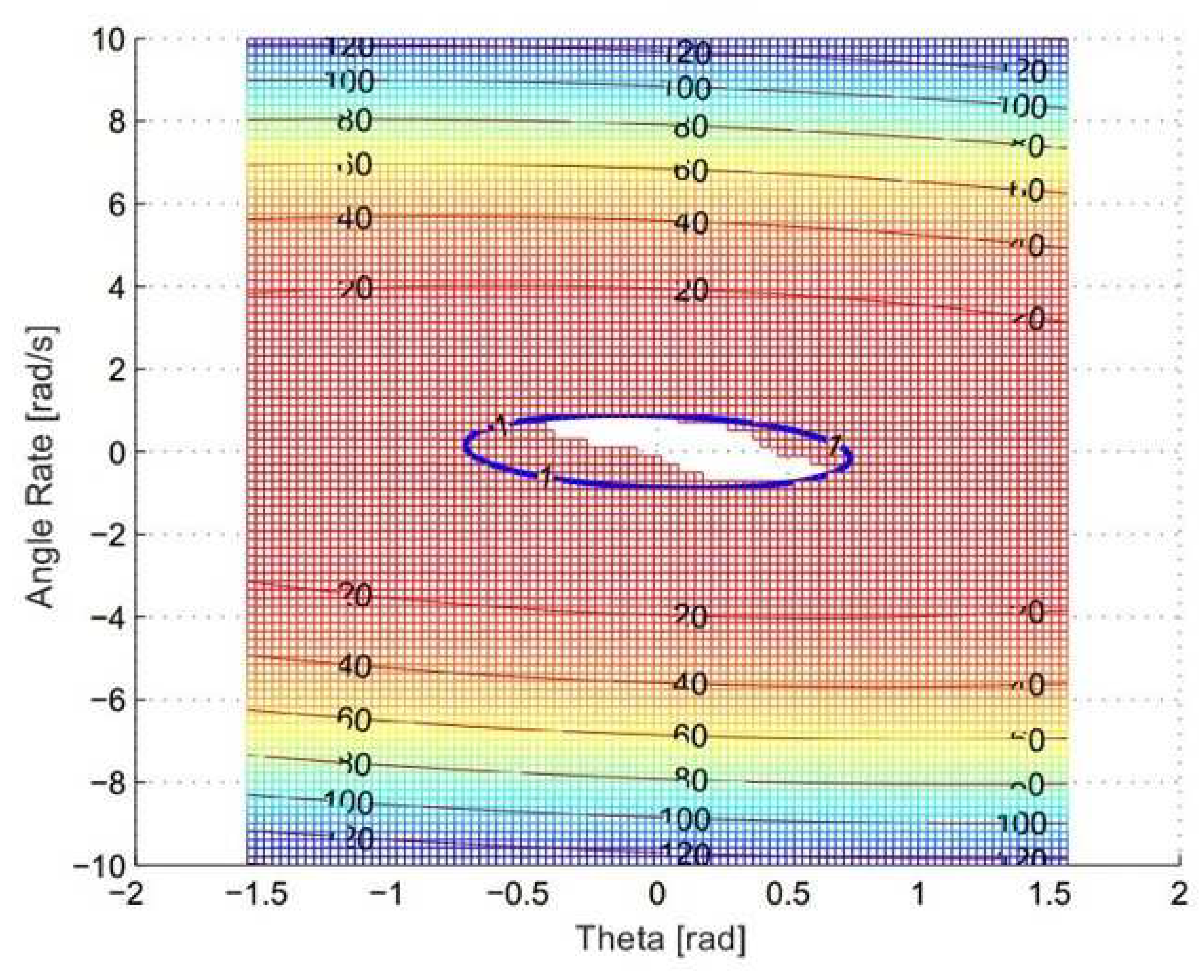
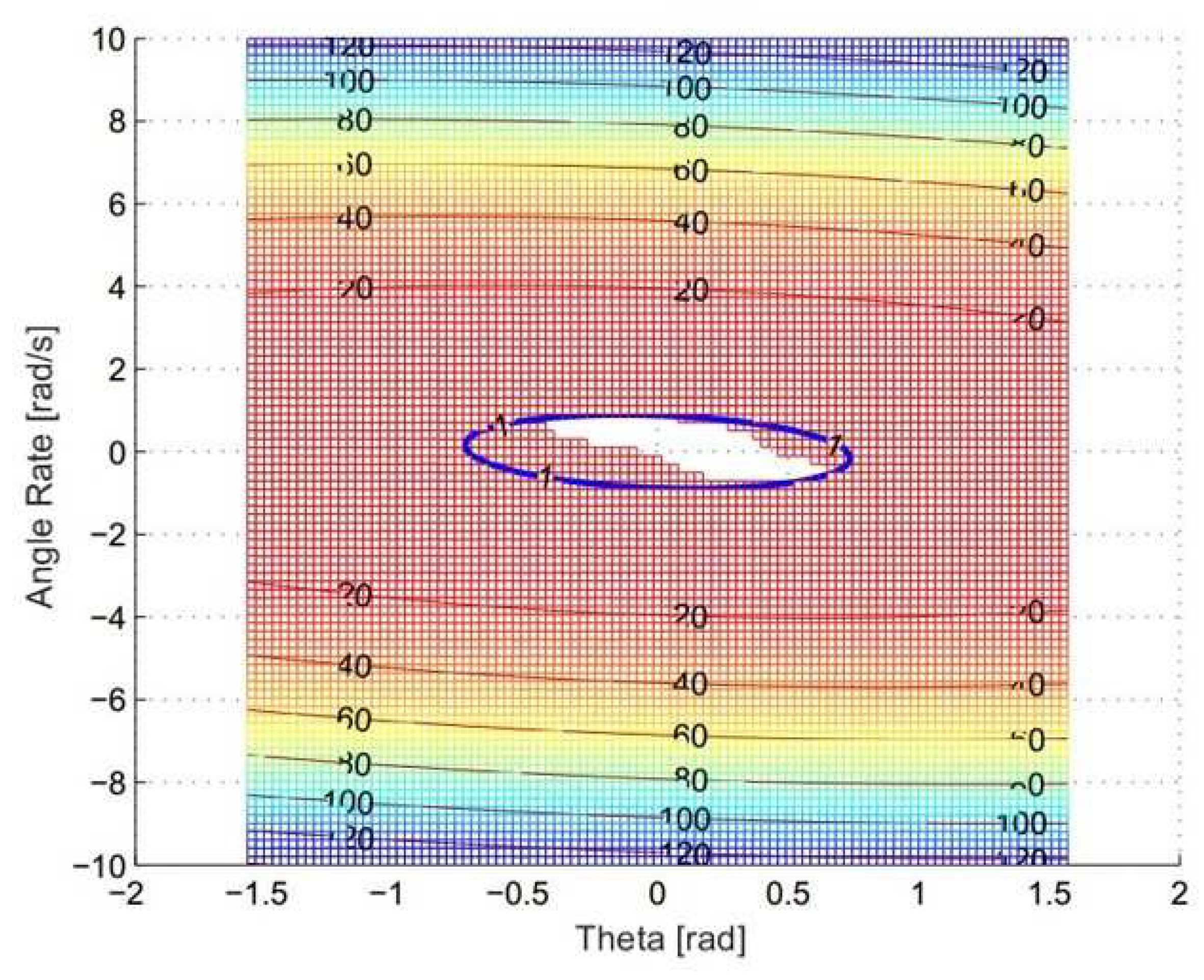
5.1. Roll Angle Channel Self-Stability Analysis
- For a given pair of , with the specified P and Q, we have the objective function . The optimization problem under such set up would bewhere . This optimization problem would search along each contour to find the maximum value of in this contour.
- Base on step 1, set to find the , which means in this contour the maximum value of is 0.
- Repeat steps 1 and 2 in the compact sets of and ; get a set of .
- Define the boundary function of states, , where .
- Find the in the set of , which give the states’ minimum bounds. Then, the optimal linearization coefficients, and , are picked up.
5.2. Pitch-Yaw Angle Channel Stability Analysis
5.3. Overall Stability Analysis
6. Simulation Results
6.1. Simulation for Roll Angle Stability Analysis
6.2. Pith-Yaw Angle Attitude Control
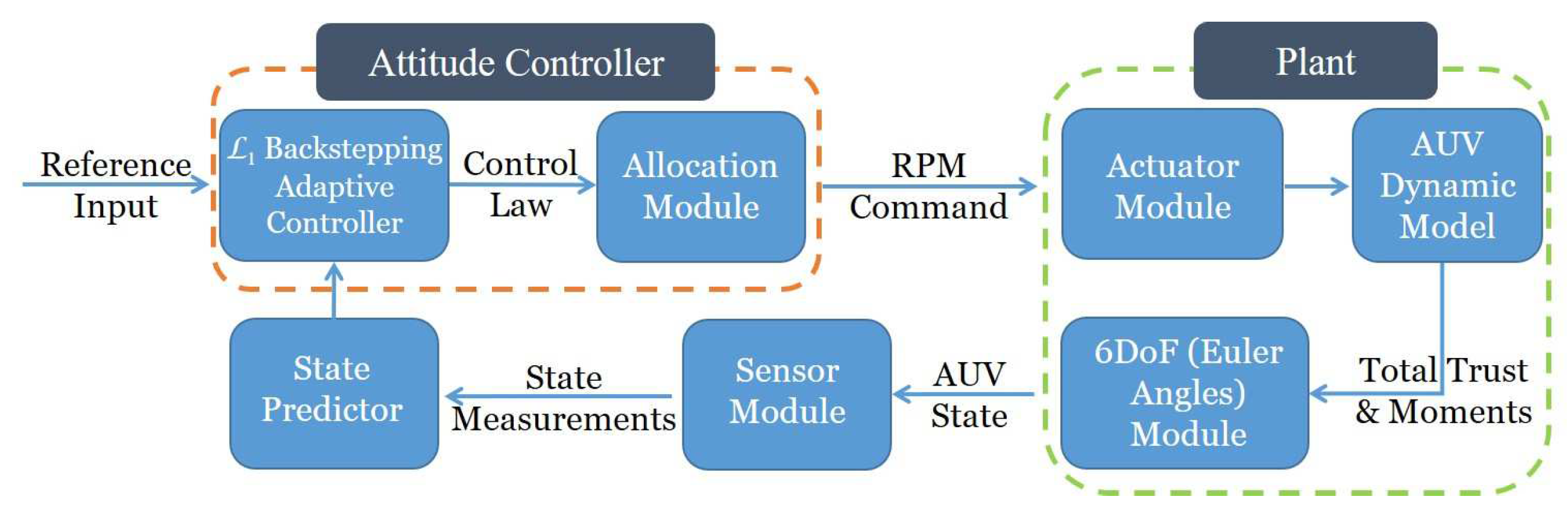
6.2.1. Simulation Structure
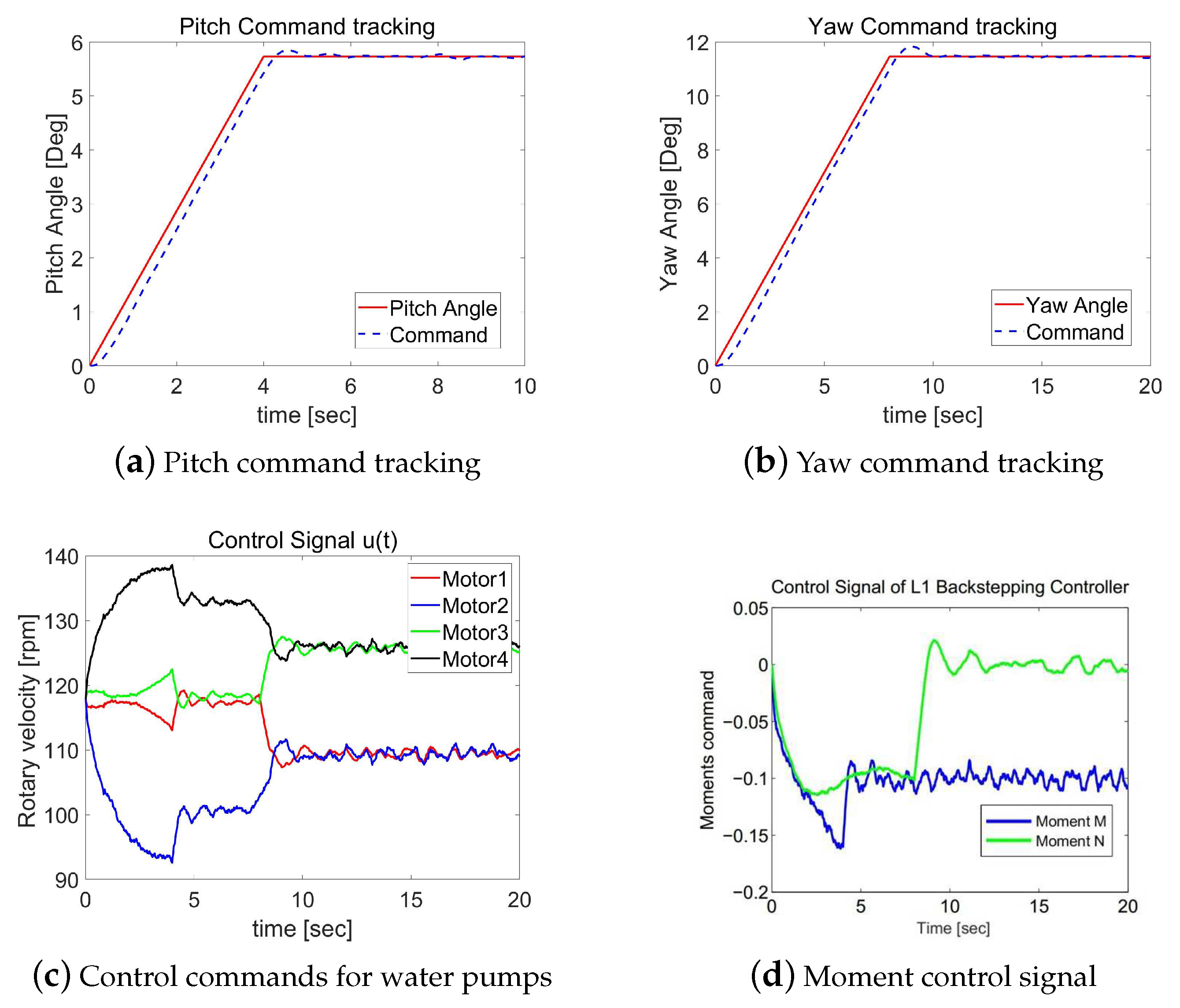
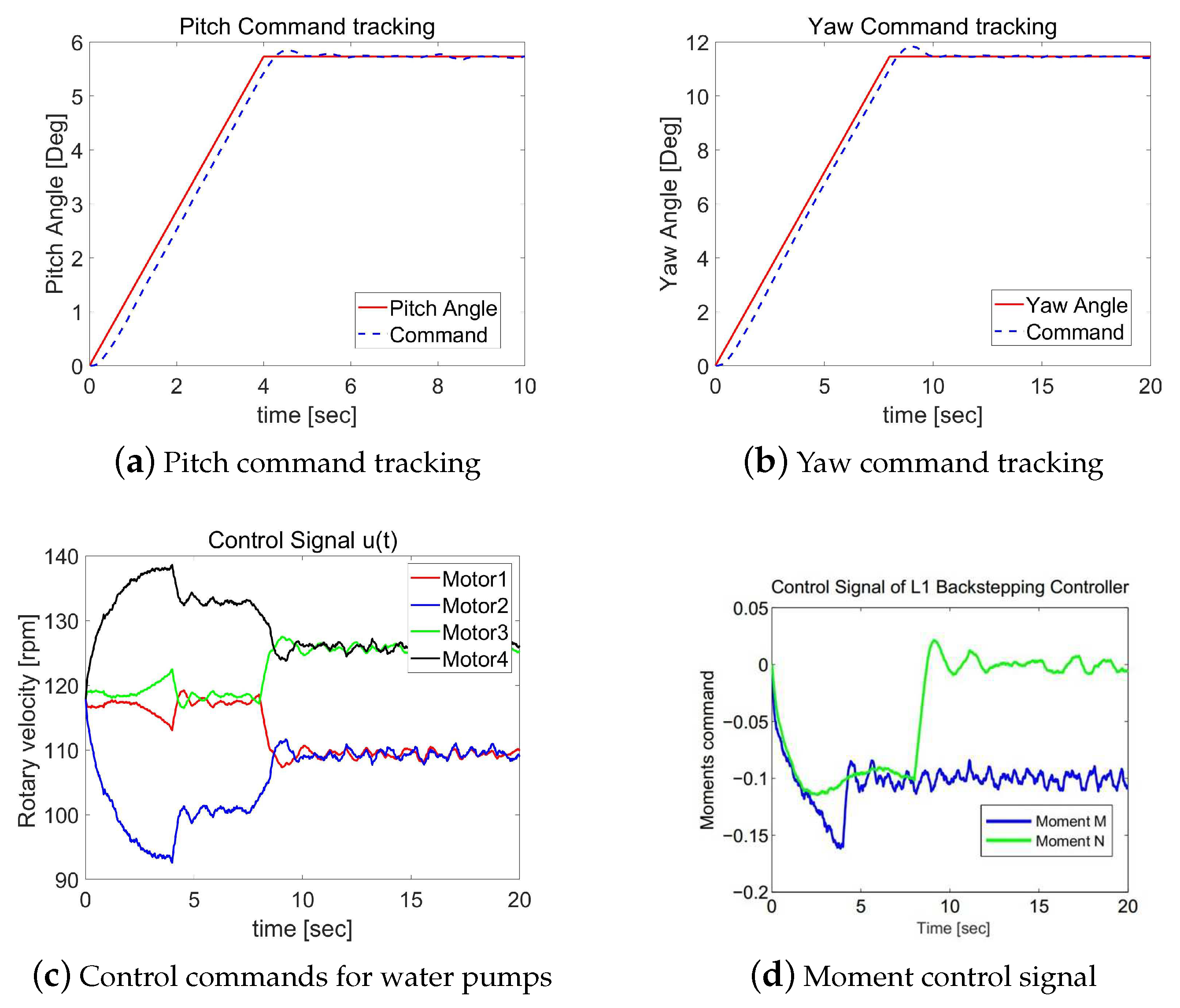
6.2.2. Closed-Loop Response
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. AUV Modeling
Appendix A.1. Proof of Concept Testing

Appendix A.2. Dynamic Model of the AUV
References
- Blidberg, D.R. The development of autonomous underwater vehicles (auvs): A brief summary. In Proceedings of the IEEE ICRA, Seoul, Korea, 21–26 May 2001; Volume 4. [Google Scholar]
- Bovio, E.; Cecchi, D.; Baralli, F. Autonomous underwater vehicles for scientific and naval operations. Annu. Rev. Control 2006, 30, 117–130. [Google Scholar] [CrossRef]
- Logan, C.L. A comparison between H-infinity/mu-synthesis control and sliding-mode control for robust control of a small autonomous underwater vehicle. In Proceedings of the IEEE Symposium on Autonomous Underwater Vehicle Technology (AUV’94), Cambridge, MA, USA, 19–20 July 1994; IEEE: Piscataway, NJ, USA, 1995; pp. 399–416. [Google Scholar]
- Cui, R.; Zhang, X.; Cui, D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng. 2016, 123, 45–54. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-loop integral terminal sliding mode tracking control for UUVs with adaptive dynamic compensation of uncertainties and disturbances. IEEE J. Ocean. Eng. 2018, 44, 29–53. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles. IEEE J. Ocean. Eng. 2018, 44, 363–385. [Google Scholar] [CrossRef]
- Feng, Z.; Allen, R. Reduced order H-infinity control of an autonomous underwater vehicle. Control Eng. Practice 2004, 12, 1511–1520. [Google Scholar] [CrossRef]
- Petrich, J.; Stilwell, D.J. Robust control for an autonomous underwater vehicle that suppresses pitch and yaw coupling. Ocean Eng. 2011, 38, 197–204. [Google Scholar] [CrossRef]
- Che, J.; Cernio, J.; Prainito, J.; Zuba, M.; Cao, C.; Cui, J.H.; Kazerounian, K. An advanced Autonomous Underwater Vehicle design and control strategy. In Proceedings of the IEEE 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Mallikarjunan, S.; Nesbitt, B.; Kharisov, E.; Xargay, E.; Hovakimyan, N.; Cao, C. L1 adaptive controller for attitude control of multirotors. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4831. [Google Scholar]
- Hovakimyan, N.; Cao, C. L1 Adaptive Control Theory: Guaranteed Robustness with Fast Adaptation; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar]
- Cao, C.; Hovakimyan, N. Design and Analysis of a Novel L1 Adaptive Control Architecture With Guaranteed Transient Performance. IEEE Trans. Autom. Control 2008, 53, 586–591. [Google Scholar] [CrossRef]
- Cao, C.; Hovakimyan, N. Stability Margins of L1 Adaptive Control Architecture. IEEE Trans. Autom. Control 2010, 55, 480–487. [Google Scholar]
- Hovakimyan, N.; Cao, C.; Kharisov, E.; Xargay, E.; Gregory, I.M. L 1 adaptive control for safety-critical systems. IEEE Control Syst. Mag. 2011, 31, 54–104. [Google Scholar]
- Luo, J.; Cao, C.; Yang, Q. L1 adaptive controller for a class of non-affine multi-input multi-output nonlinear systems. Int. J. Control 2013, 86, 348–359. [Google Scholar] [CrossRef]
- Che, J.; Santone, M.; Cao, C. Adaptive control for systems with output constraints using an online optimization method. J. Optim. Theory Appl. 2015, 165, 480–506. [Google Scholar] [CrossRef]
- Ma, T.; Cao, C. L 1 adaptive output-feedback descriptor for multivariable nonlinear systems with measurement noises. Int. J. Robust Nonlinear Control 2019, 29, 4097–4115. [Google Scholar] [CrossRef]
- Che, J.; Cao, C. L1 adaptive control of system with unmatched disturbance by using eigenvalue assignment method. In Proceedings of the 2012 IEEE 51st Annual Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 4823–4828. [Google Scholar]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB® Second, Completely Revised; Springer: Berlin, Germany, 2017; Volume 118. [Google Scholar]
- Yuh, J. Modeling and control of underwater robotic vehicles. IEEE Trans. Syst. Man Cybern. 1990, 20, 1475–1483. [Google Scholar] [CrossRef]
- Abkowitz, M. Stability and Motion Control of Ocean Vehicles; MIT Press: Cambridge, MA, USA, 1969. [Google Scholar]
- Clayton, B.; Bishop, R. Mechanics of Marine Vehicles; E. & F.N. Spon: London, UK, 1982. [Google Scholar]
- Koo, T.; Ma, Y.; Sastry, S. Nonlinear control of a helicopter based unmanned aerial vehicle model. IEEE Trans. Control Syst. Technol. 2001. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Symbol | Definition |
|---|---|---|---|
| Roll angle | Uncertainty in pitch and yaw channel | ||
| Pitch angle | Estimation of | ||
| Yaw angle | Moment command from baseline controller | ||
| Roll rate | Moment command from adaptive controller | ||
| Pitch rate | |||
| Yaw rate | |||
| J | Moment of inertia of the AUV | ||
| K |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Che, J.; Cao, C.
Advanced Autonomous Underwater Vehicles Attitude Control with
Liu Y, Che J, Cao C.
Advanced Autonomous Underwater Vehicles Attitude Control with
Liu, Yuqian, Jiaxing Che, and Chengyu Cao.
2019. "Advanced Autonomous Underwater Vehicles Attitude Control with
Liu, Y., Che, J., & Cao, C.
(2019). Advanced Autonomous Underwater Vehicles Attitude Control with