Design and Analysis of Handshake-Based MAC with Delay Variations in Underwater Acoustic Networks



Abstract
:1. Introduction
- Adaptive slot length for Slotted-FAMA: We first identify the multiscale delay variations using field tests. We then carry out simulations to show that the delay variations degrade the throughput of Slotted-FAMA with the fixed slot length, and the peak throughput can be achieved at a slot length of the actual propagation delay. Based on this observation, we propose an adaptive slot length to overcome the effect of the delay variances to improve the throughput of MAC protocols.
- Absorbing Markov chain modeling: We model the Slotted-FAMA with adaptive slot length by an absorbing Markov chain and derive the closed-form expression for the throughput.
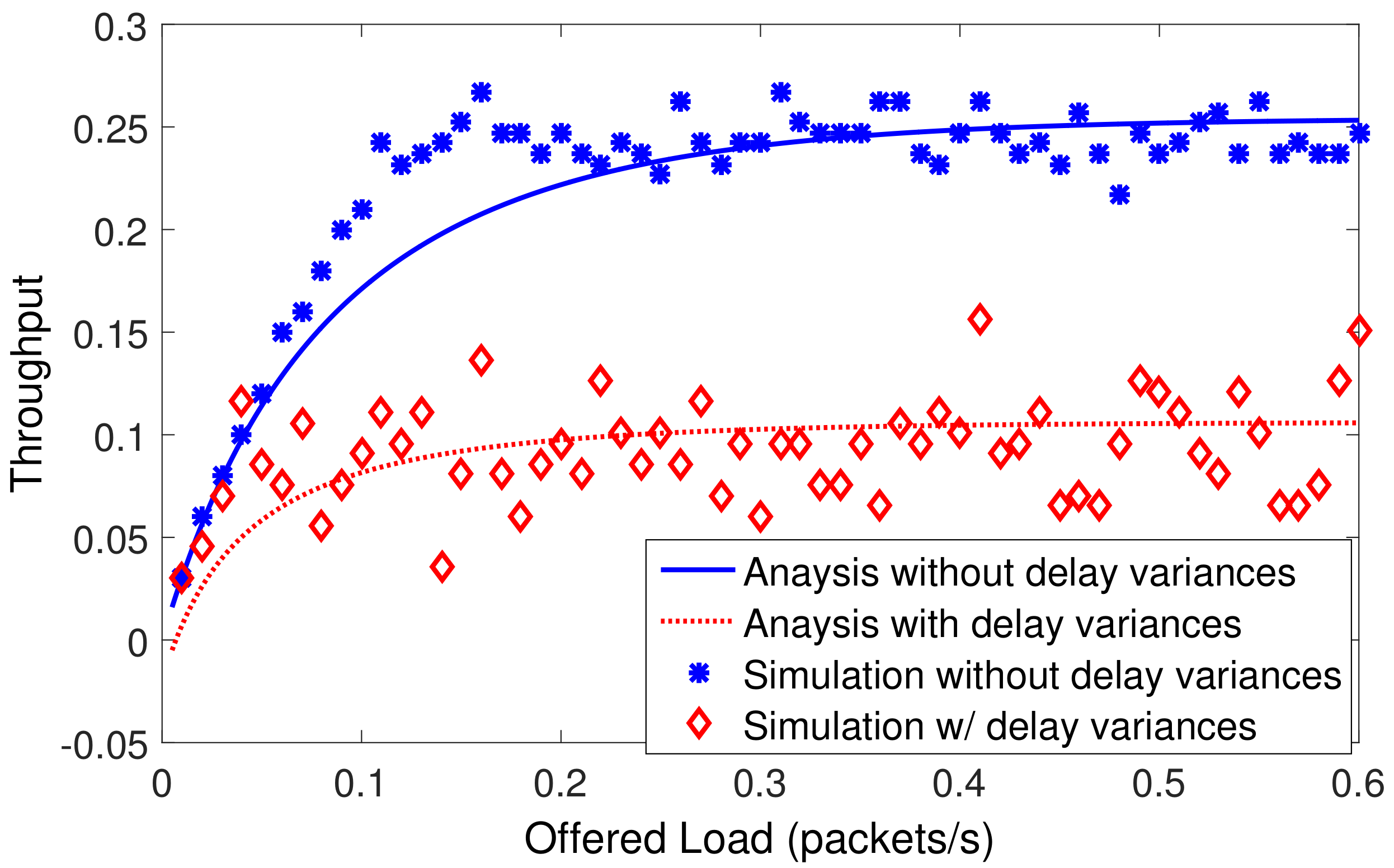
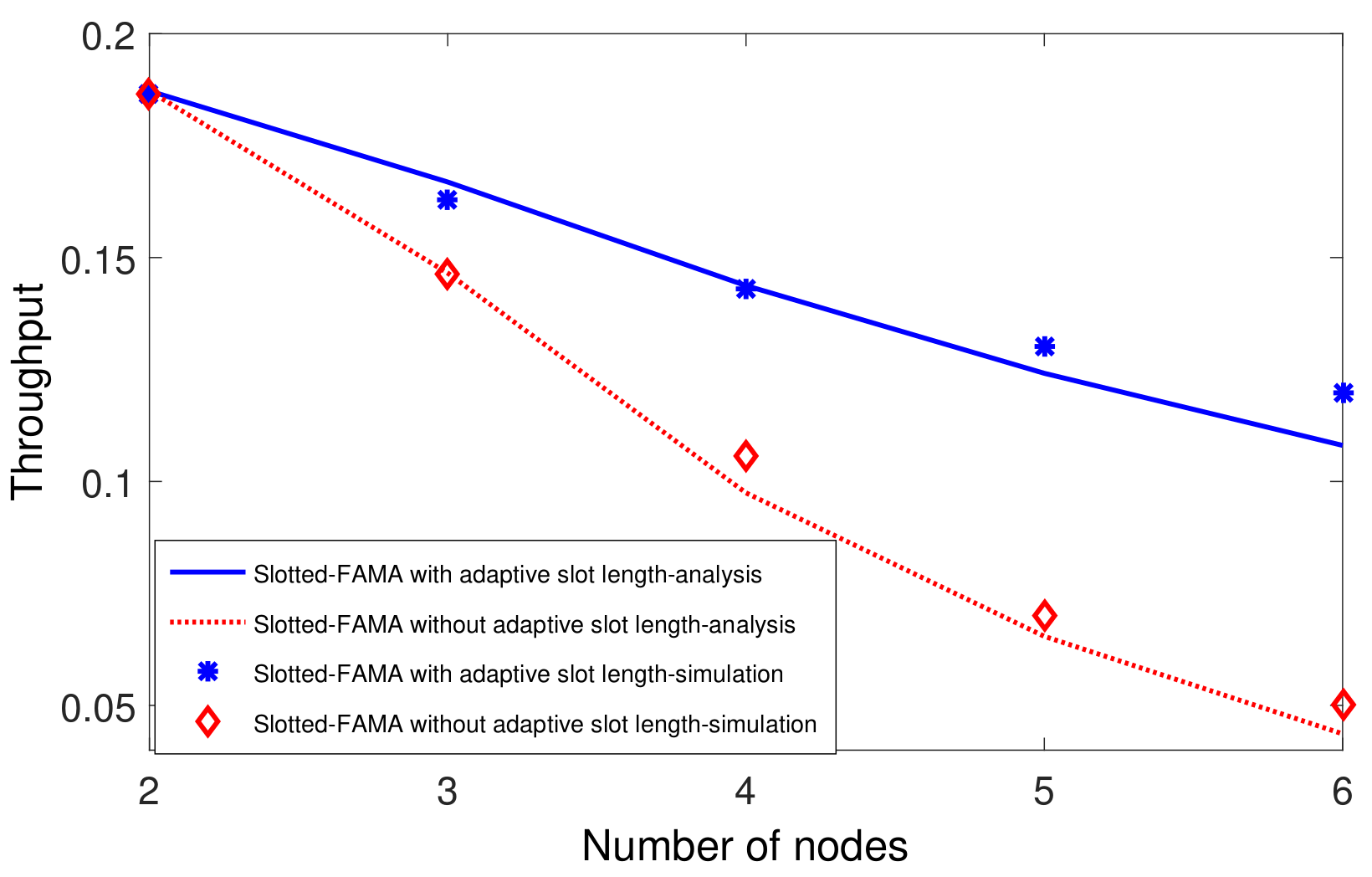
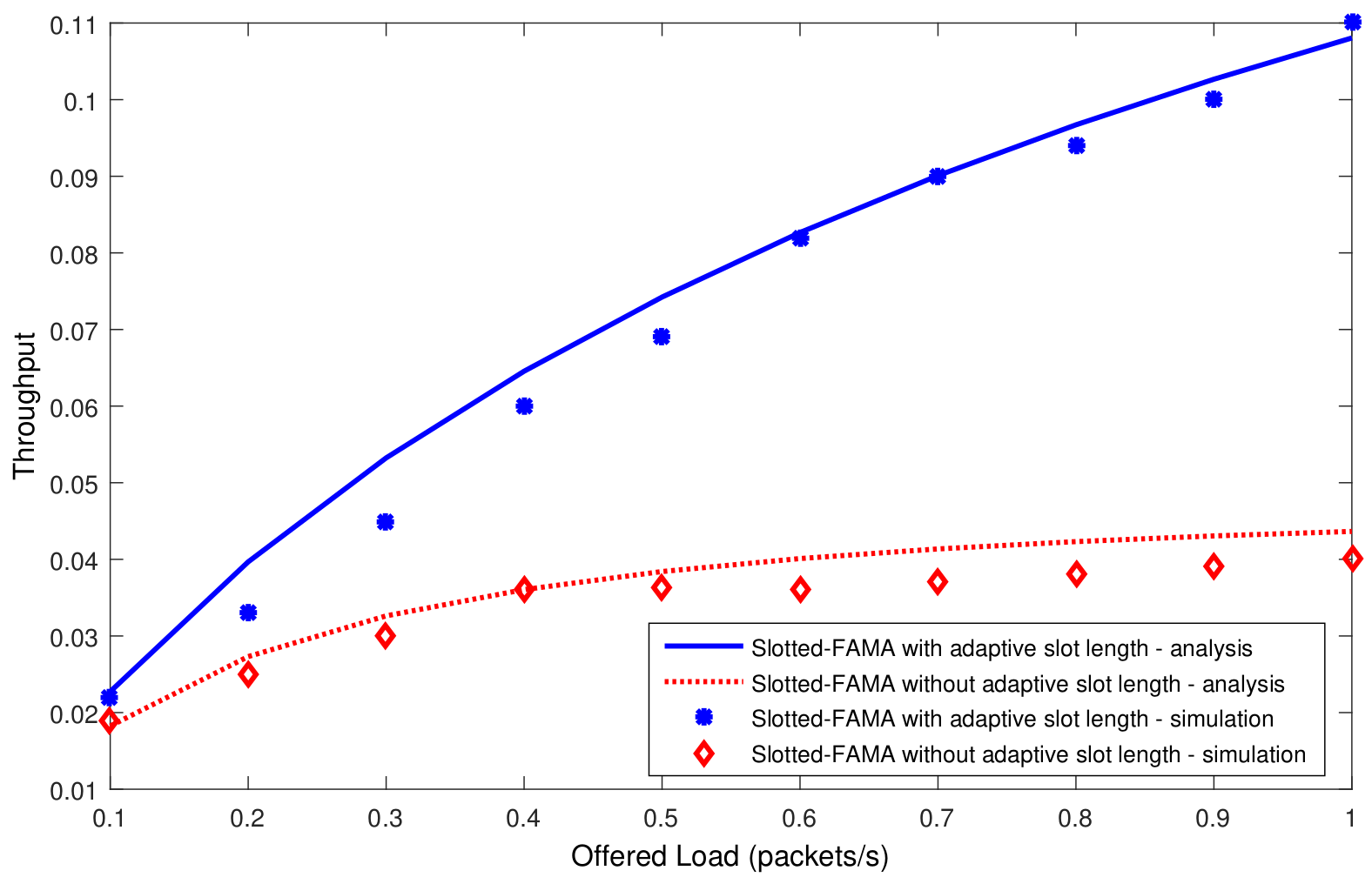
- Analysis and simulation studies: The simulations using the Aqua-Sim [13] in ns2 validate our absorbing Markov chain modeling. Simulations are also carried out to verify the throughput improvement of our proposed adaptive slot length.
2. Related Works
3. Delay Variations Definition and Slot Length Adaptation
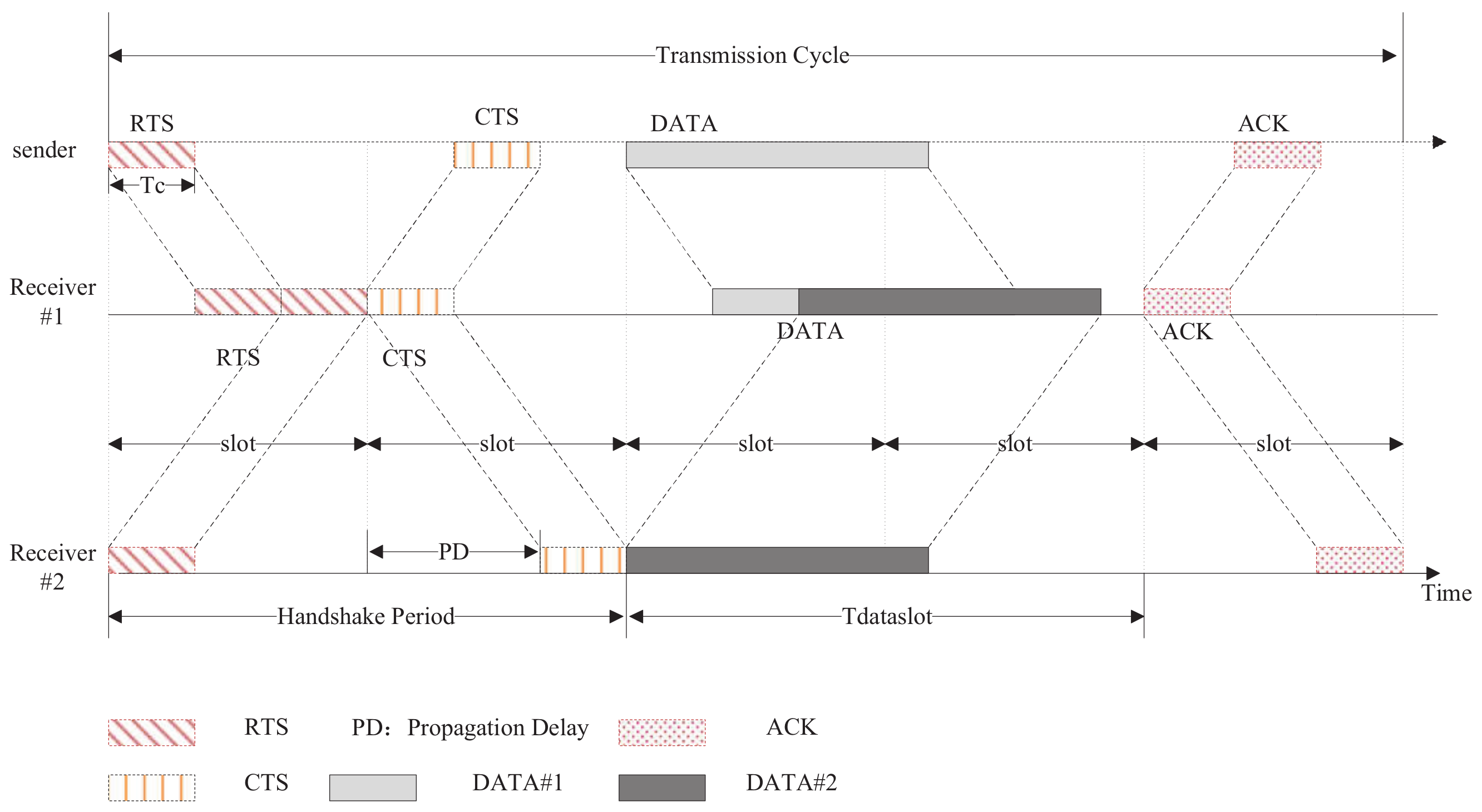
3.1. Overview of Slotted-FAMA
3.2. Definition of Delay Variations
- Large-scale delay variation: By assuming a fixed propagation speed at 1500 m/s, needs 1 s to propagate its carriers to r, whereas needs 2 s. In the practical applications, the medium transmitter–receiver distance has reached up to tens of kilometers [28]. In this sense, the propagation delay may range from hundreds of milliseconds to tens of seconds, which is caused by different geographic distributions.
- Small-scale delay variations: The locations of underwater nodes are not fixed. For example, the nodes may drift with the wave, and some vehicle nodes may cruise. Even a small move of 100 m has led to a delay variation of ~67 ms at the propagation speed of 1500 m/s. Furthermore, the salinity, temperature, and depth can change the acoustic speed in a range of [1]. For example, when the propagation speed decreases from 1500 m/s to 1450 m/s, ’s carriers need 69 more milliseconds to reach its receiver. It is caused by a dynamic underwater environment.
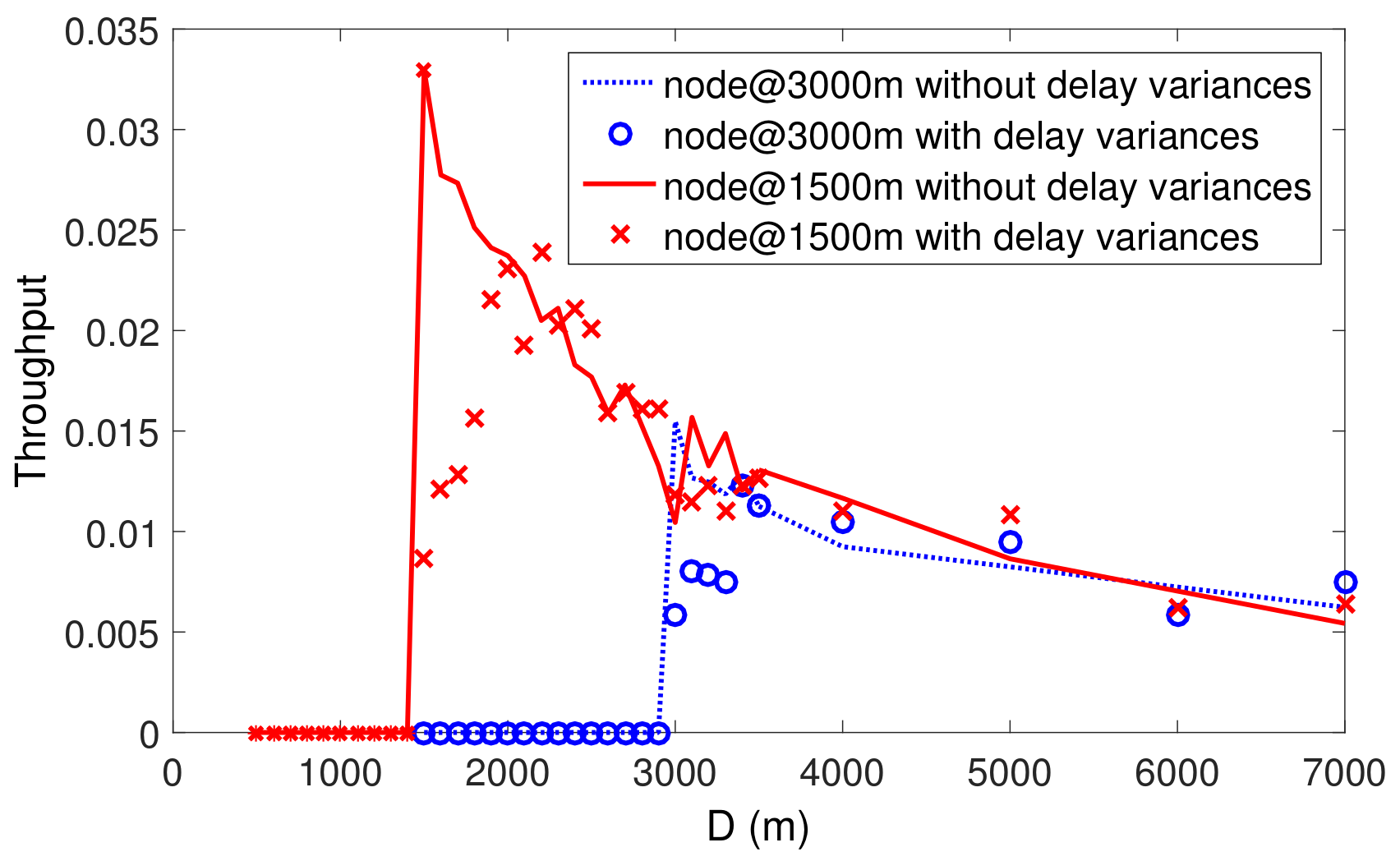
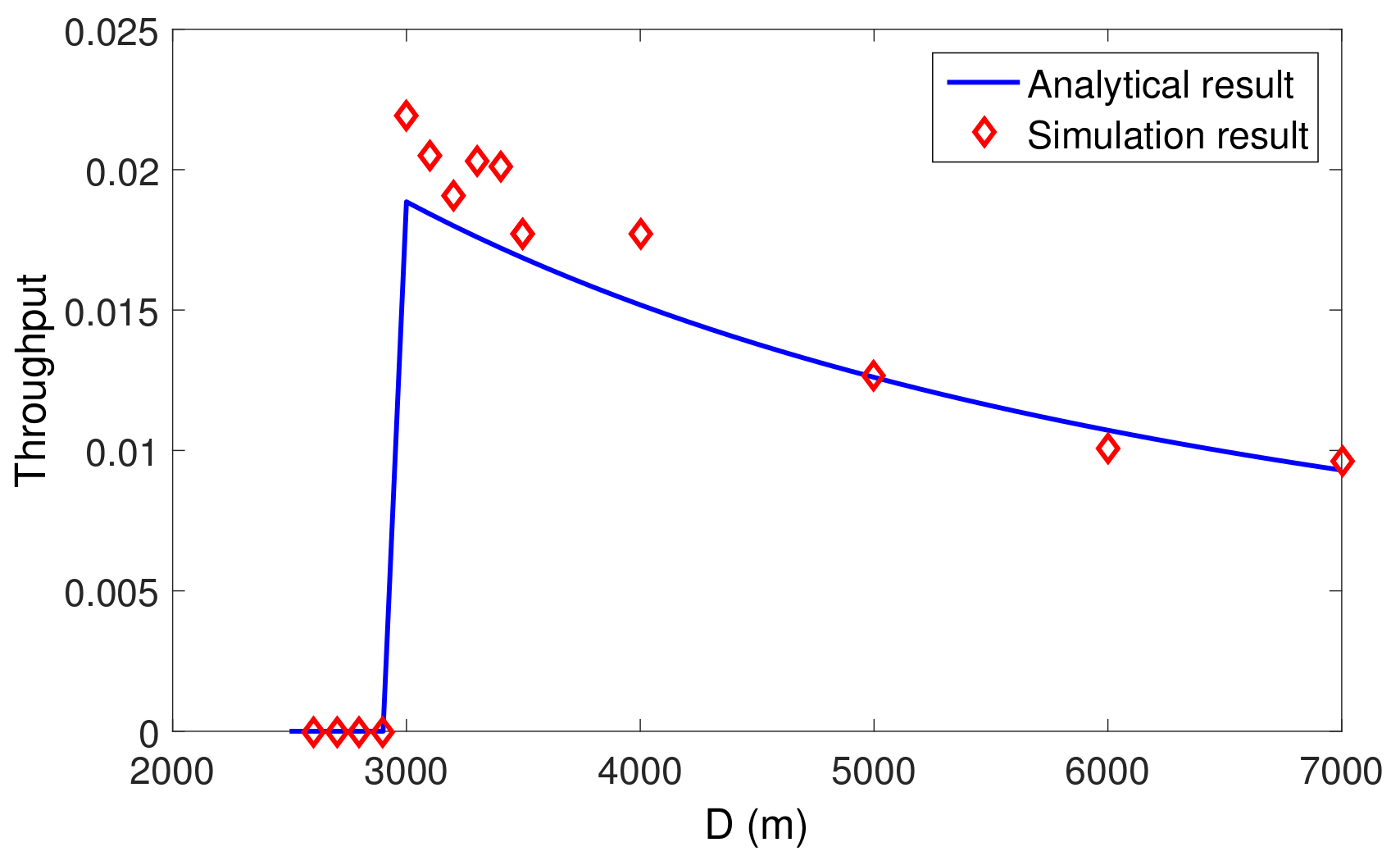
- The throughput of is almost zero when s, whereas the throughput of is almost zero when s. The reason for this phenomenon is that Slotted-FAMA fails to reserve channel for data transmissions using RTS/CTS handshakes (Slotted-FAMA exchanges RTS/CTS before data transmissions to reserve channel). The RTS or CTS requires around 1 s to to be propagated between and r. When s, the previous RTS/CTS transmissions may collide with RTS/CTS transmissions in the next slot. In this case, node fails to reserve the channel to send the data. A similar phenomenon is also observed at node . This observation shows the impact of large-scale delay variation.
- Without small-scale delay variations in the simulation setting, nodes and reach their maximum throughput at around s and s, respectively. However, with small-scale delay variations, the throughput for both and reach their maximum values at around s and s instead. It takes an ~330 ms longer slot length to reach the peak of throughput with the small-scale delay variation in the range of ms. This is because the underwater acoustic communication needs a long preamble and a long processing time [5]. This observation shows the impact of small-scale delay variation.
- The throughput increases and then decreases with the increase of . The maximum throughput is achieved when the slot length is set to around the actual propagation and transmission delay. The reason is that a short slot length (i.e., s for s1 and s for ) may result in the channel reservation failures, whereas a long slot length wastes time in idle waiting and results in a low channel utilization. This observation shows the importance of adapting the slot length to the propagation delay variations.
3.3. Adaptive Slot Length for Slotted-FAMA
4. Throughput Modeling
4.1. System Model
4.2. Markov Chain Model for Slotted-FAMA
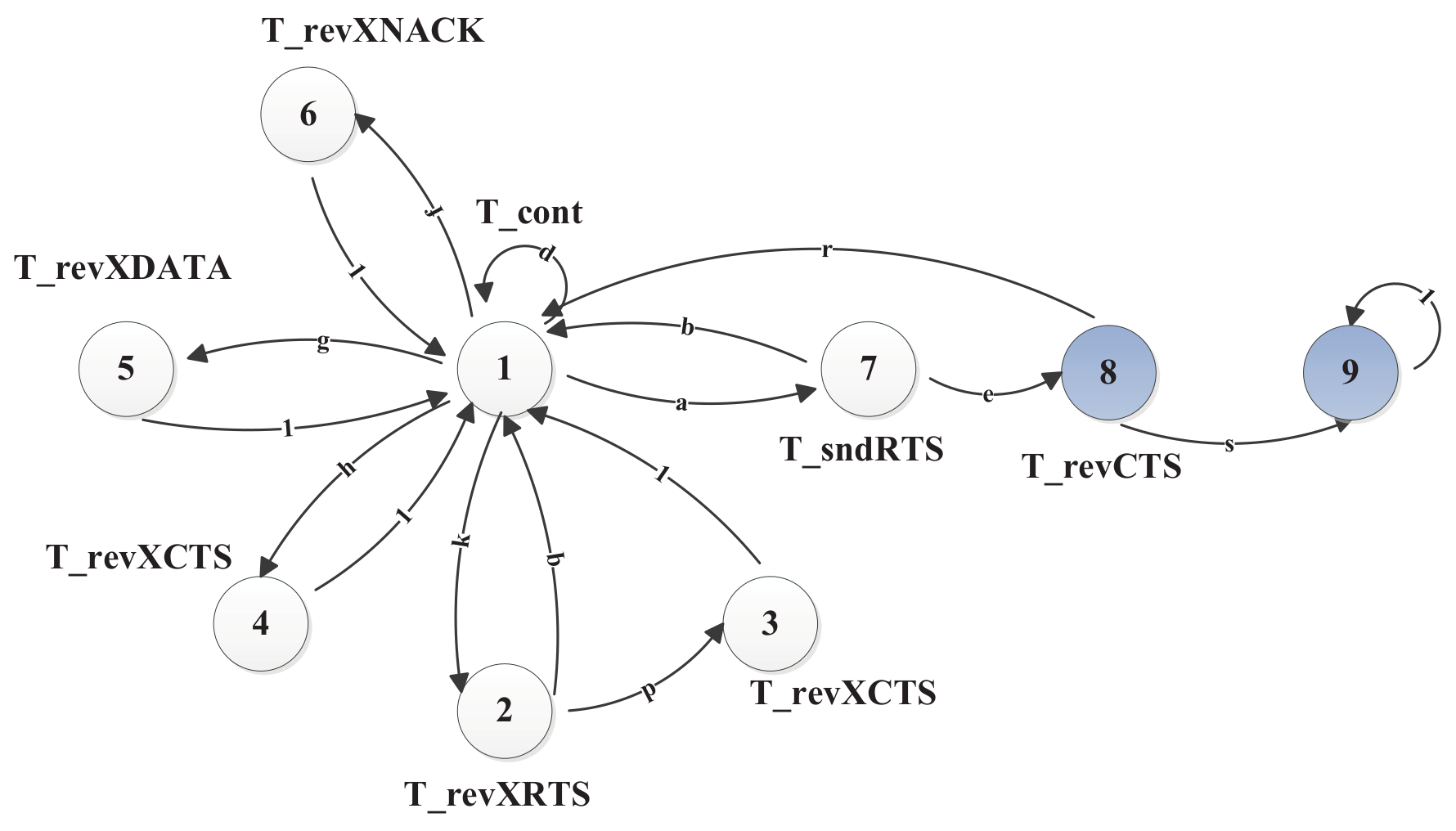
4.2.1. System States
4.2.2. State Transition Probability
4.2.3. State Stay Time
4.3. Throughput Calculation
5. Simulations and Discussions
5.1. Impact of Small-Scale Delay Variations on Throughput
5.2. Impact of Large-Scale Delay Variations on Throughput
5.3. Performance Comparisons
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Melodia, T.; Kulhandjian, H.; Kuo, L.C.; Demirors, E.; Basagni, S.; Conti, M.; Giordano, S.; Stojmenovic, I. Advances in underwater acoustic networking. In Mobile ad hoc Networking: Cutting Edge Directions; Wiley: Hoboken, NJ, USA, 2013; pp. 804–852. [Google Scholar]
- Chen, W.; Yu, H.; Guan, Q.; Ji, F.; Chen, F. Reliable and opportunistic transmissions for underwater acoustic networks. IEEE Netw. 2018, 32, 94–99. [Google Scholar] [CrossRef]
- Ahn, J.; Syed, A.; Krishnamachari, B.; Heidemann, J. Design and analysis of a propagation delay tolerant ALOHA protocol for underwater networks. Ad Hoc Netw. 2011, 9, 752–766. [Google Scholar] [CrossRef]
- Mandal, P.; De, S.; Chakraborty, S.S. A receiver synchronized slotted Aloha for underwater wireless networks with imprecise propagation delay information. Ad Hoc Netw. 2013, 11, 1443–1455. [Google Scholar] [CrossRef]
- Zhu, Y.; Peng, Z.; Cui, J.H.; Chen, H. Toward practical MAC design for underwater acoustic networks. IEEE Trans. Mob. Comput. 2014, 14, 872–886. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.S.; Chua, K.C. Aloha-based MAC protocols with collision avoidance for underwater acoustic networks. In Proceedings of the IEEE INFOCOM 2007—26th IEEE International Conference on Computer Communications, Barcelona, Spain, 6–12 May 2007; pp. 2271–2275. [Google Scholar]
- Petrioli, C.; Petroccia, R.; Stojanovic, M. A comparative performance evaluation of MAC protocols for underwater sensor networks. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008. [Google Scholar]
- Guo, X.; Frater, M.R.; Ryan, M.J. Design of a propagation-delay-tolerant MAC protocol for underwater acoustic sensor networks. IEEE J. Ocean. Eng. 2009, 34, 170–180. [Google Scholar]
- Ng, H.H.; Soh, W.S.; Motani, M. MACA-U: A media access protocol for underwater acoustic networks. In Proceedings of the IEEE GLOBECOM 2008—2008 IEEE Global Telecommunications Conference, New Orleans, LO, USA, 30 November–4 December 2008. [Google Scholar]
- Molins, M.; Stojanovic, M. Slotted FAMA: A MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2006. [Google Scholar]
- Li, C.; Xu, Y.; Xu, C.; An, Z.; Diao, B.; Li, X. DTMAC: A delay tolerant MAC protocol for underwater wireless sensor networks. IEEE Sens. J. 2015, 16, 4137–4146. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H.; Hu, T.; Cui, J.H.; Shi, Z.; Fei, Y.; Zhou, S. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009. [Google Scholar]
- Chitre, M.; Shahabudeen, S.; Stojanovic, M. Underwater acoustic communications and networking: Recent advances and future challenges. Mar. Technol. Soc. J. 2008, 42, 103–116. [Google Scholar] [CrossRef]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Chen, Y.J.; Wang, H.L. Ordered CSMA: A collision-free MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar]
- Huang, P.H.; Desai, M.; Qiu, X.; Krishnamachari, B. On the multihop performance of synchronization mechanisms in high propagation delay networks. IEEE Trans. Comput. 2008, 58, 577–590. [Google Scholar] [CrossRef]
- Gorma, W.; Mitchell, P.D.; Morozs, N.; Zakharov, Y.V. CFDAMA-SRR: A MAC Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 60721–60735. [Google Scholar] [CrossRef]
- Abramson, N. The ALOHA System—Another Alternative for Computer Communications; AFIP Press: Washington, DC, USA, 1970; Volume 37. [Google Scholar]
- Vieira, L.F.M.; Kong, J.; Lee, U.; Gerla, M. Analysis of aloha protocols for underwater acoustic sensor networks. In Proceedings of the First ACM International Workshop on Under Water Networks (WUWNet ’06), Los Angeles, CA, USA, 25 September 2006. [Google Scholar]
- Peleato, B.; Stojanovic, M. Distance aware collision avoidance protocol for ad-hoc underwater acoustic sensor networks. IEEE Commun. Lett. 2007, 11, 1025–1027. [Google Scholar] [CrossRef]
- Ng, H.H.; Soh, W.S.; Motani, M. Saturation throughput analysis of the slotted BiC-MAC protocol for underwater acoustic networks. IEEE Trans. Wirel. Commun. 2015, 14, 3948–3960. [Google Scholar] [CrossRef]
- Syed, A.A.; Ye, W.; Heidemann, J.; Krishnamachari, B. Understanding spatio-temporal uncertainty in medium access with ALOHA protocols. In Proceedings of the Second Workshop on Underwater Networks, Montréal, QC, Canada, 14 September 2007; pp. 41–48. [Google Scholar]
- Syed, A.A.; Ye, W.; Heidemann, J. T-Lohi: A new class of MAC protocols for underwater acoustic sensor networks. In Proceedings of the IEEE INFOCOM 2008—The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 231–235. [Google Scholar]
- Ng, H.H.; Soh, W.S.; Motani, M. A bidirectional-concurrent MAC protocol with packet bursting for underwater acoustic networks. IEEE J. Ocean. Eng. 2013, 38, 547–565. [Google Scholar] [CrossRef]
- Park, M.K.; Rodoplu, V. UWAN-MAC: An energy-efficient MAC protocol for underwater acoustic wireless sensor networks. IEEE J. Ocean. Eng. 2007, 32, 710–720. [Google Scholar] [CrossRef]
- Zhang, Z.; Blanco, L.H. A Cluster Based Smart MAC Layer Protocol for Delay-Tolerant Underwater Wireless Sensor Networks. In Proceedings of the 2013 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Beijing, China, 10–12 October 2013; pp. 308–315. [Google Scholar]
- Stojanovic, M. Acoustic (Underwater) Communications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Chandrasekhar, V.; Seah, W.K.; Choo, Y.S.; Ee, H.V. A Survey on Medium Access Control in Underwater Acoustic Sensor Networks. In Proceedings of the 2009 International Conference on Advanced Information Networking and Applications Workshops, Bradford, UK, 26–29 May 2009. [Google Scholar]
- Liu, J.; Wang, Z.; Cui, J.H.; Zhou, S.; Yang, B. A joint time synchronization and localization design for mobile underwater sensor networks. IEEE Trans. Mob. Comput. 2015, 15, 530–543. [Google Scholar] [CrossRef]
- Bianchi, G. Performance analysis of the IEEE 802.11 distributed coordination function. IEEE J. Sel. Areas Commun. 2000, 18, 535–547. [Google Scholar] [CrossRef]
- Bianchi, G.; Fratta, L.; Oliveri, M. Performance evaluation and enhancement of the CSMA/CA MAC protocol for 802.11 wireless LANs. In Proceedings of the PIMRC’96—7th International Symposium on Personal, Indoor, and Mobile Communications, Taipei, Taiwan, 18 October 1996; pp. 392–396. [Google Scholar]
- Grinstead, C.M.; Snell, J.L. Introduction to Probability; American Mathematical Soc.: Providence, RI, USA, 2012. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| Data generation rate | |
| The probability of correctly receiving the control frame | |
| The probability of correctly receiving the data frame | |
| The duration of a control frame | |
| The duration of a data frame | |
| A slot length |
| States | Description | Stay Time |
|---|---|---|
| state 1 | waiting packet arrivals and contending with back-off | |
| state 2 | overhearing an xRTS | |
| state 3 | overhearing an xCTS after the corresponding xRTS | |
| state 4 | overhearing an xCTS | |
| state 5 | overhearing an xDATA | |
| state 6 | overhearing an xNACK | |
| state 7 | waiting for CTS | |
| state 8 | sending data packet | |
| state 9 | receiving ACK | absorbing state |
| Description | |
|---|---|
| a | The probability of sending RTS packet |
| b | The probability of not receiving CTS packet |
| d | The probability of being idle |
| e | The probability of receiving CTS packet |
| f | The probability of overhearing xNACK packet |
| g | The probability of overhearing xDATA packet |
| h | The probability of overhearing xCTS packet |
| k | The probability of overhearing xRTS packet |
| p | The probability of overhearing xCTS packet after overhearing the corresponding xRTS packet |
| s | The probability of receiving ACK packet |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, C.; Chen, Y.; Guan, Q.; Ji, F.; Yu, H.; Chen, F. Design and Analysis of Handshake-Based MAC with Delay Variations in Underwater Acoustic Networks. Sensors 2019, 19, 4159. https://doi.org/10.3390/s19194159
Dong C, Chen Y, Guan Q, Ji F, Yu H, Chen F. Design and Analysis of Handshake-Based MAC with Delay Variations in Underwater Acoustic Networks. Sensors. 2019; 19(19):4159. https://doi.org/10.3390/s19194159
Chicago/Turabian StyleDong, Chao, Yankun Chen, Quansheng Guan, Fei Ji, Hua Yu, and Fangjiong Chen. 2019. "Design and Analysis of Handshake-Based MAC with Delay Variations in Underwater Acoustic Networks" Sensors 19, no. 19: 4159. https://doi.org/10.3390/s19194159
APA StyleDong, C., Chen, Y., Guan, Q., Ji, F., Yu, H., & Chen, F. (2019). Design and Analysis of Handshake-Based MAC with Delay Variations in Underwater Acoustic Networks. Sensors, 19(19), 4159. https://doi.org/10.3390/s19194159