A Pheromone-Inspired Monitoring Strategy Using a Swarm of Underwater Robots


Abstract
1. Introduction
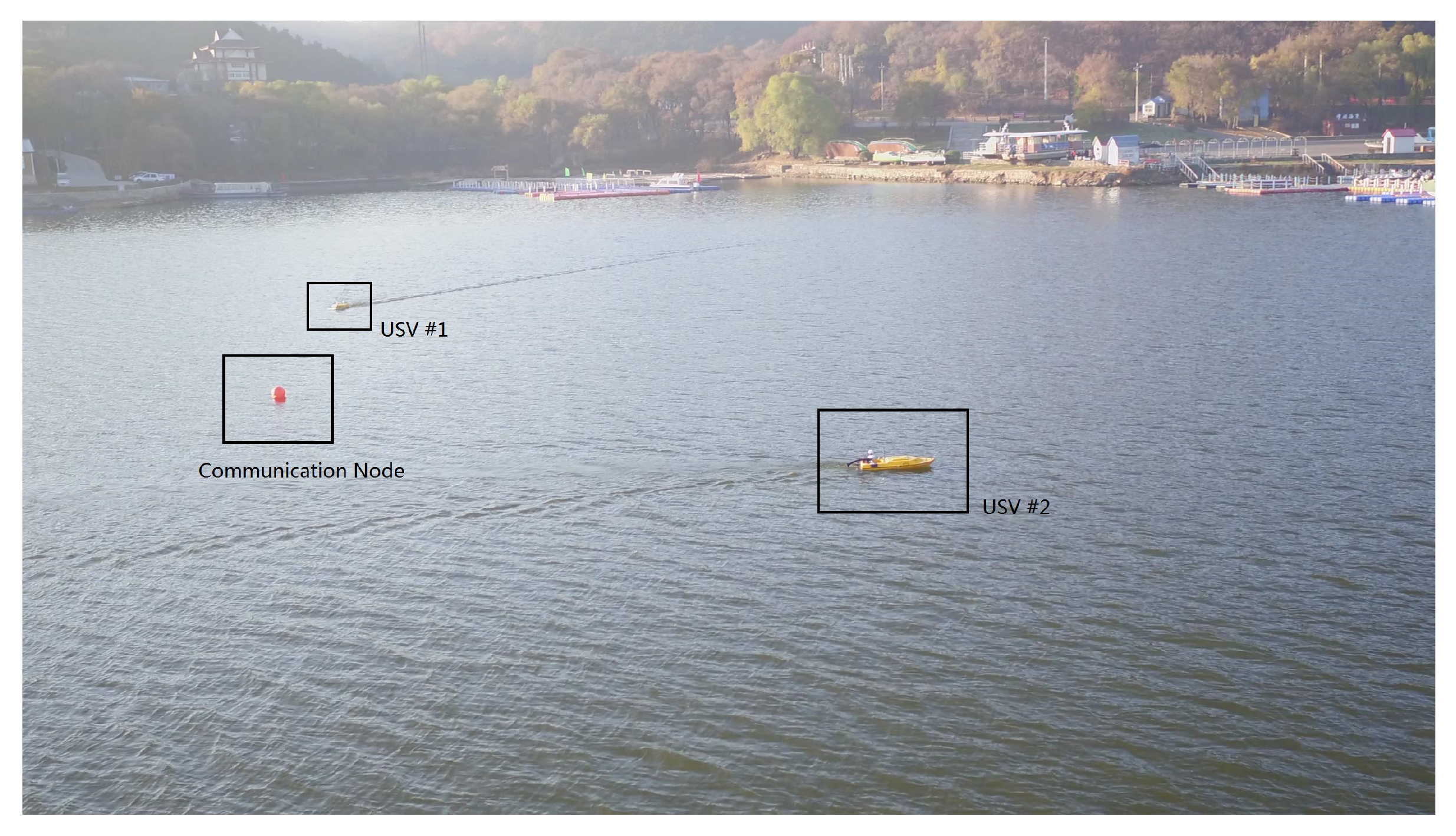
- We propose a communication network to organize a swarm of underwater robots using indirect communication. The network consists of a set of underwater communication nodes. There are various underwater navigation methods—such as Terrain-Referenced Navigation (TRN) [23], Database-Referenced Navigation (DBRN) [24] and Gravity Aided Navigation (GAN) [25]—for an underwater robot to periodically visit the nodes to exchange information and charge batteries if needed.
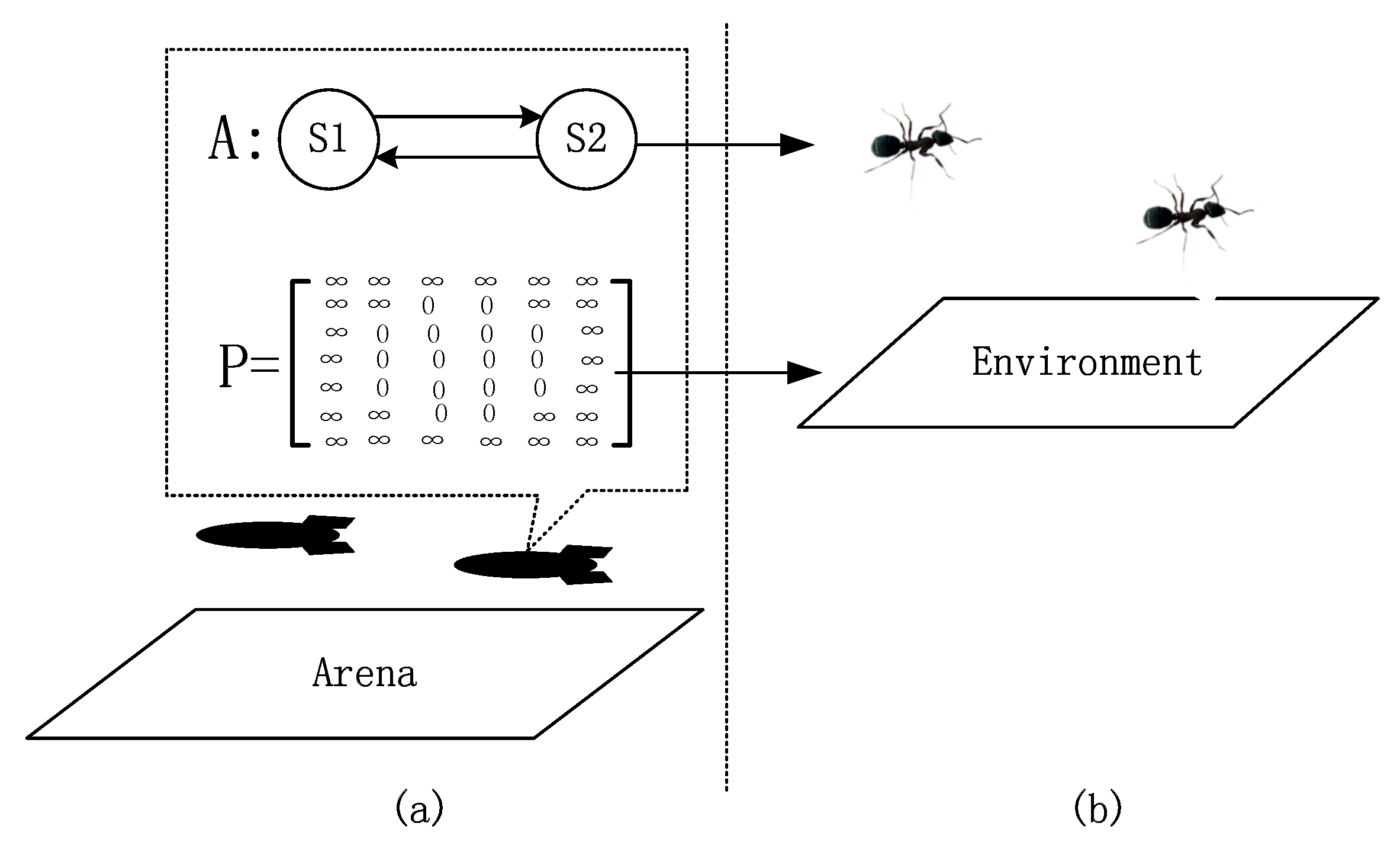
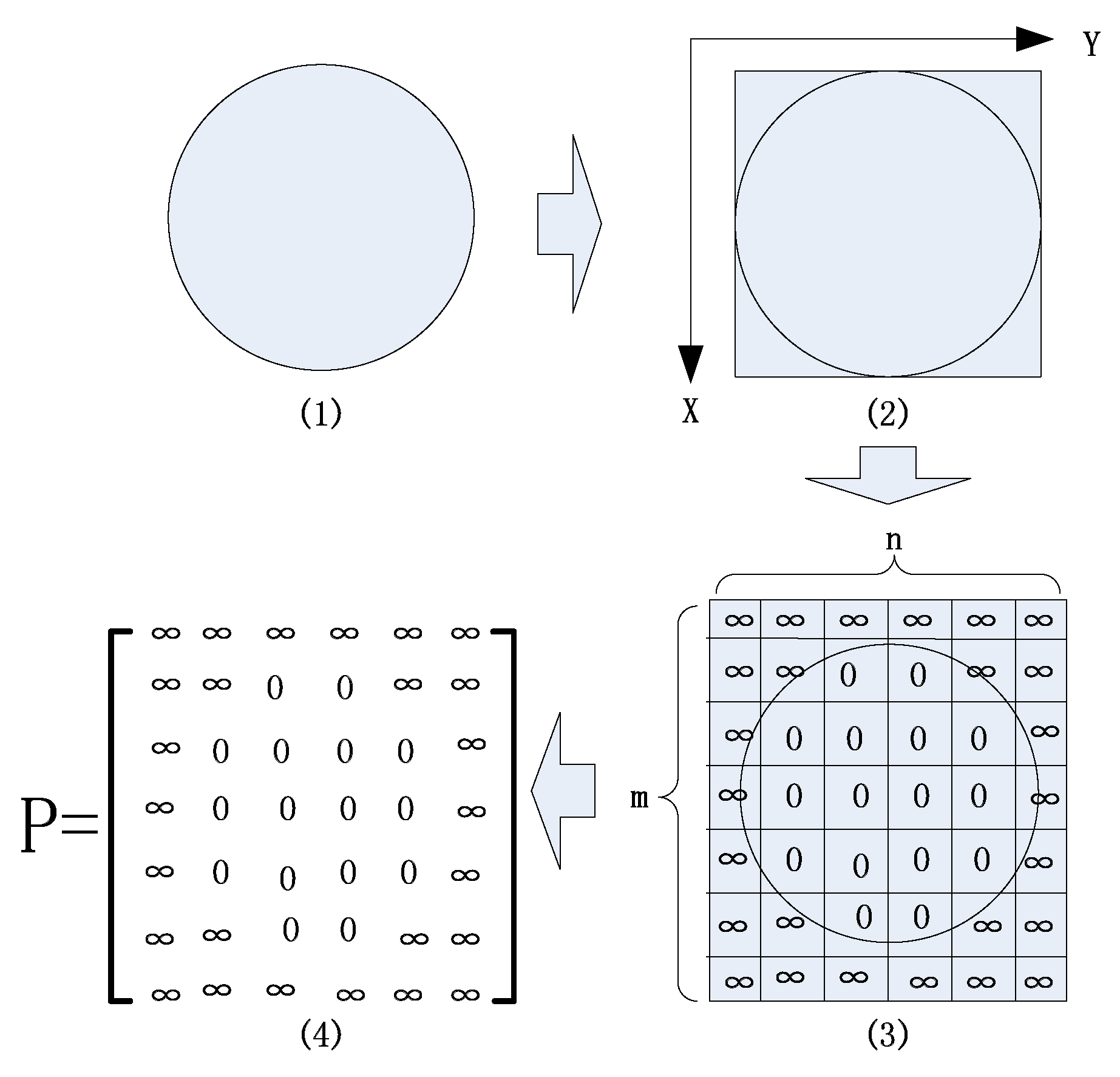
- We apply a pheromone-based controller to coordinate a swarm to monitor marine environment and search for static targets on the seafloor. The controller is composed of two layers: the layer of virtual pheromone and the layer of behavior laws. Virtual pheromone indicates the pheromone density in the area of interest (AOI). An algorithm is developed to map an AOI of a random shape to the virtual pheromone in the form of a matrix. Behavior laws are designed on top of the virtual pheromone, such that a swarm continuously monitors the environment. During the monitoring process, the swarm can also search for and report specific static targets, such as hazards or wreckage. Note that the controller is bio-inspired, and thus we do not prove the convergence of adopted algorithms.
- We introduce a swarm evolution scheme to improve the monitoring strategy by automatically adjusting the robots’ visiting period. Experimental results indicate that the choice of a visiting period affects a swarm’s performance. After adopting an evolution scheme, a swarm can achieve an acceptable performance by avoiding unfavorable cases.
2. Related Work
2.1. Underwater Communication
2.2. Pheromone-Inspired Robot Swarms
2.3. Comparison with Available Schemes
3. Problem Statement and Solution
3.1. Problem Statement and Underwater Robot Swarm with Indirect Communication
3.2. Virtual Pheromone-Based Controller
4. Pheromone Map
4.1. Mapping the AOI into the Pheromone Matrix
| Algorithm 1 Mapping into P |
| Input: The AOI: Output: The pheromone matrix:
|
4.2. Rules to Update Pheromone Matrix
| Algorithm 2 Update pheromone matrix when visiting a communication node |
| Input:, , Output:, ,
|
5. Environment Monitoring and Target Search
5.1. Behavior Law for Environment Monitoring and Target Search
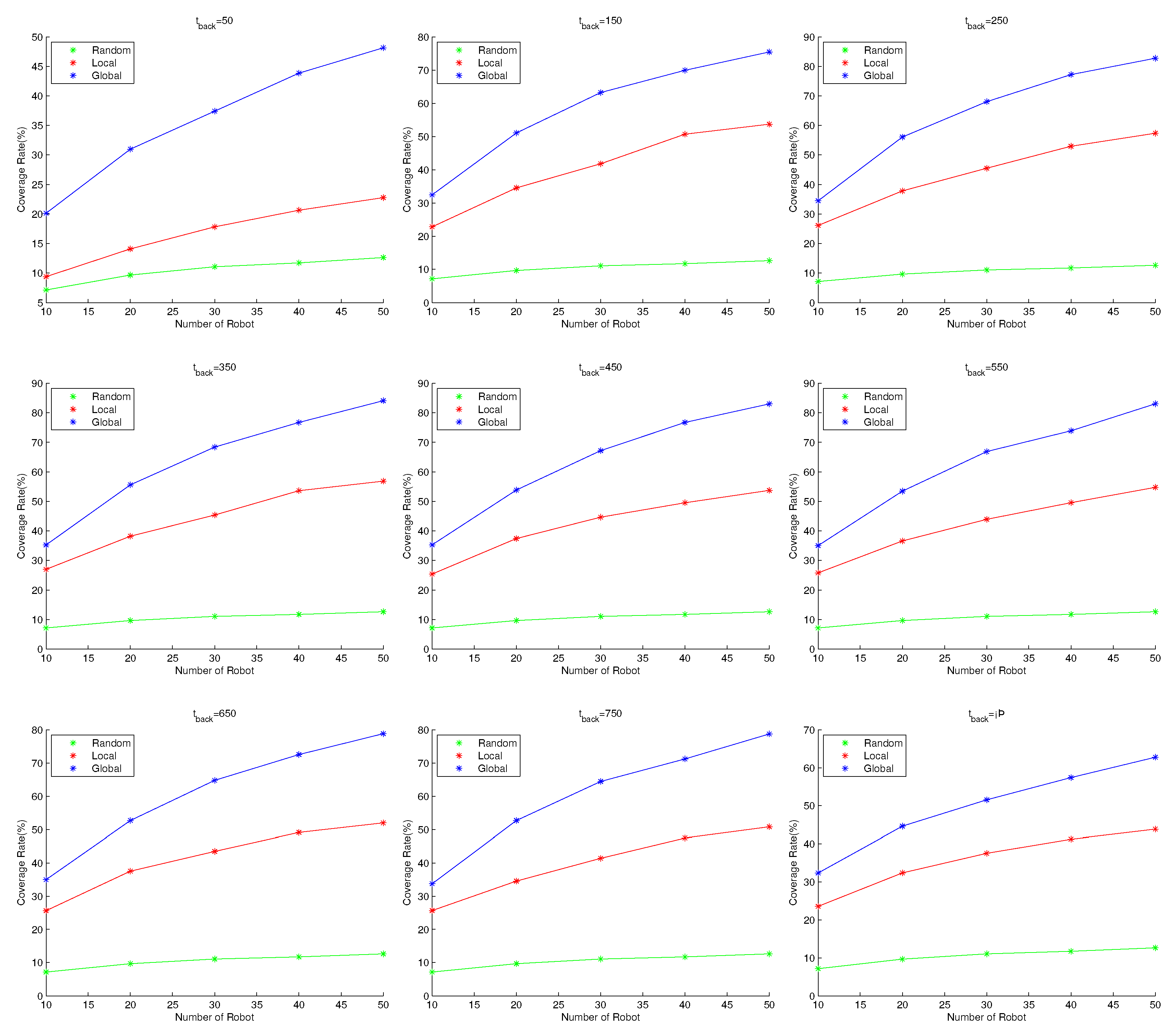
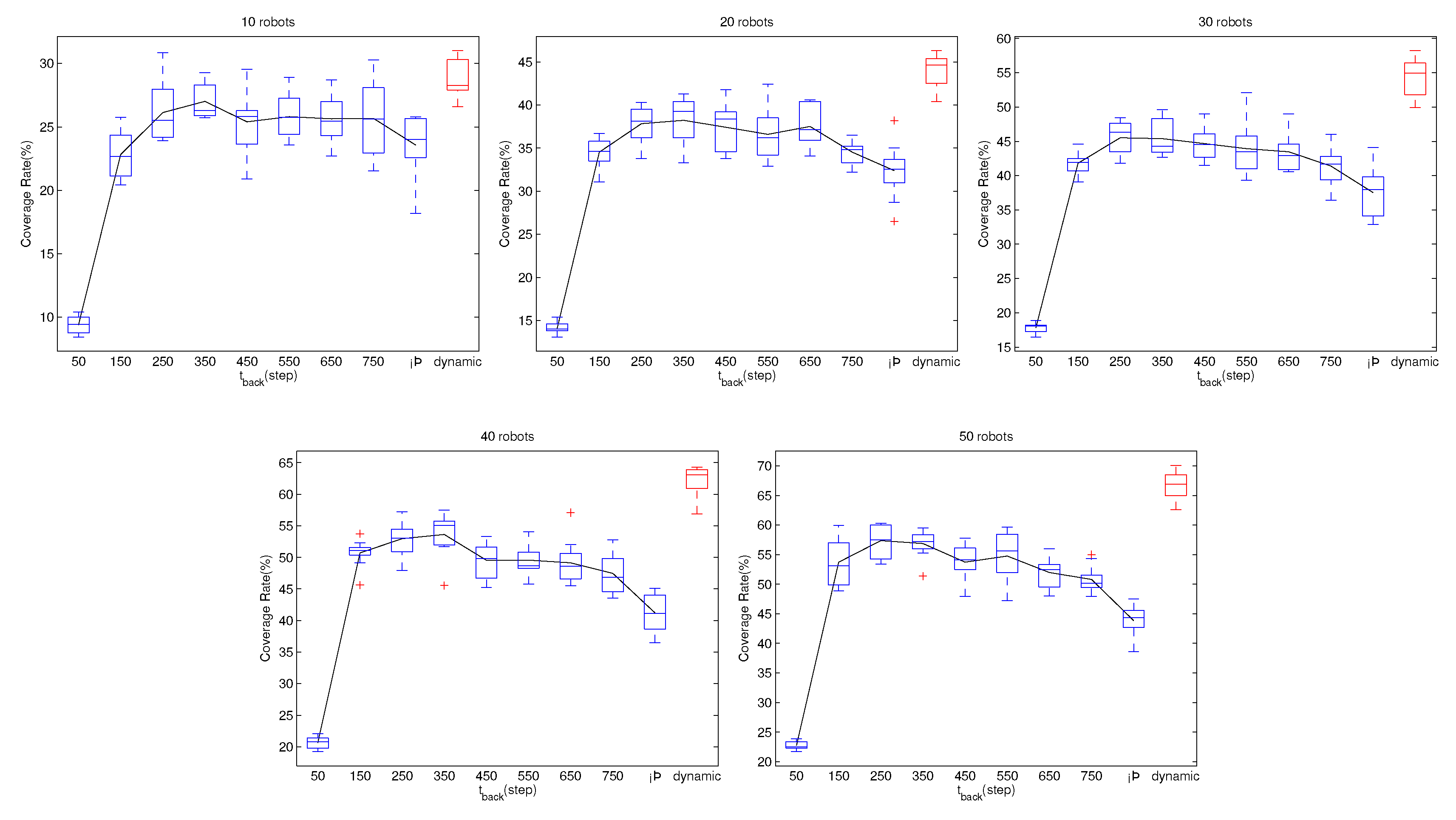
5.2. The Relationship between and Performance
- Set initial values. For each robot, we assign a small initial value to . We also set , and .
- When a robot visits the communication network the time, calculate and updatewhereand is a parameter.
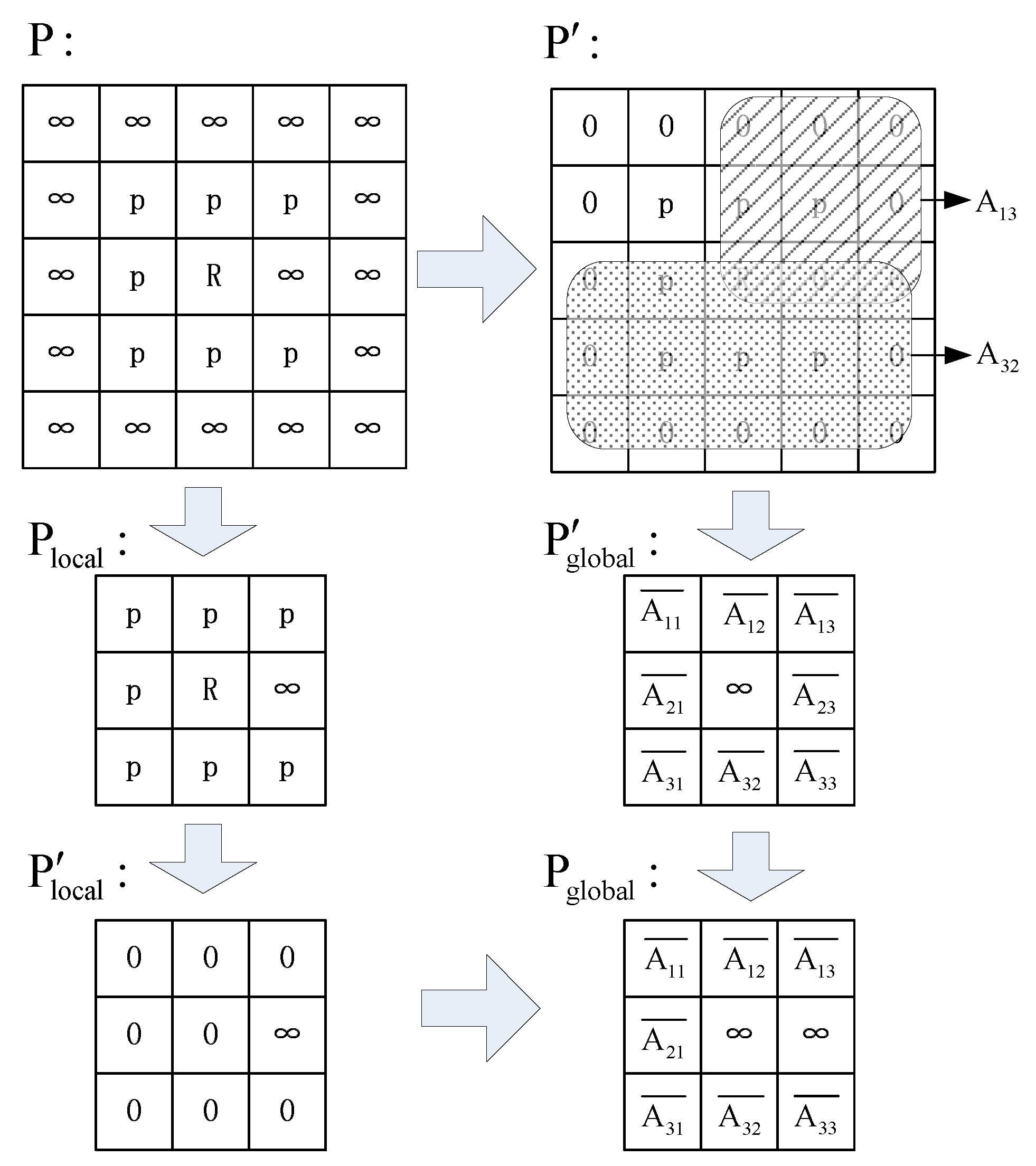
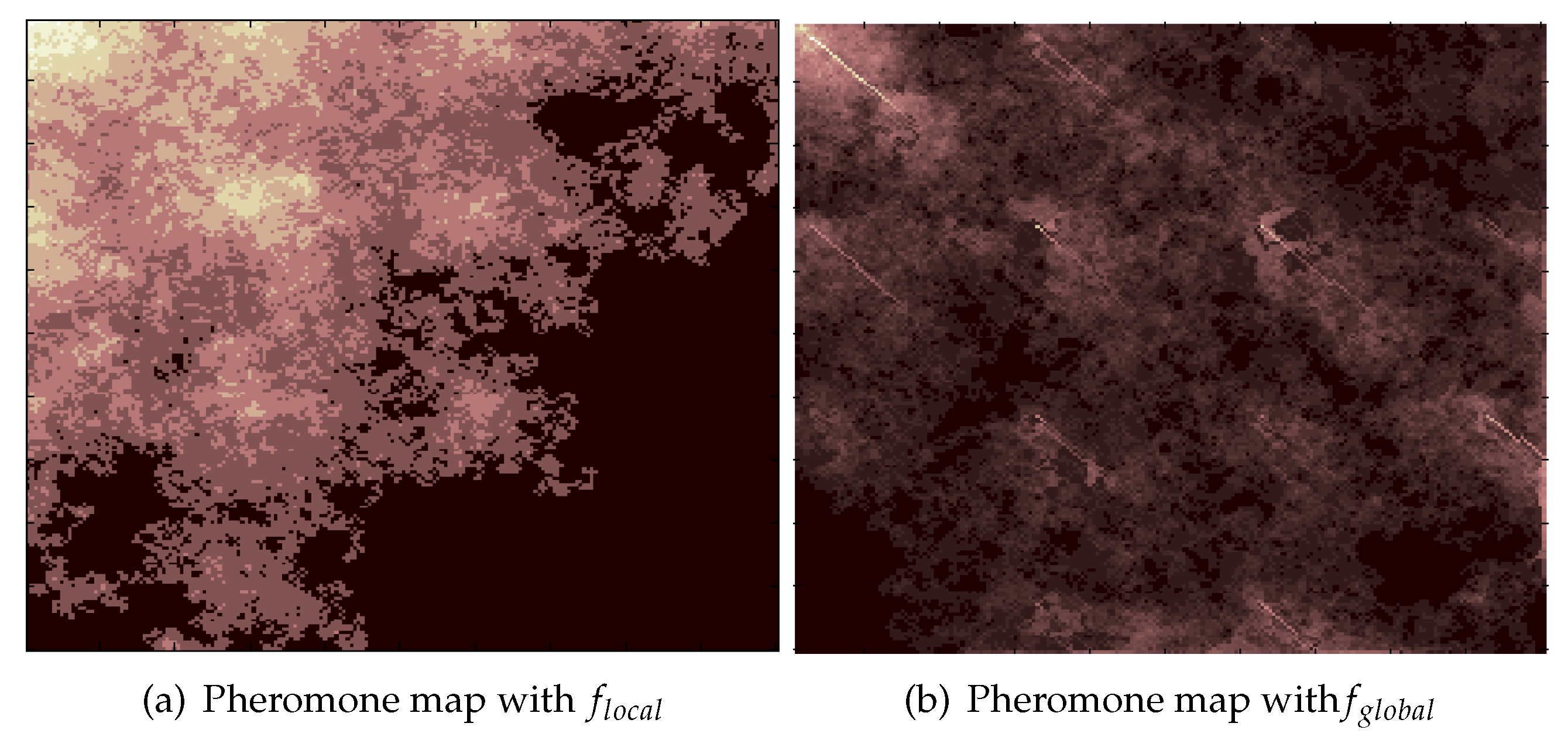
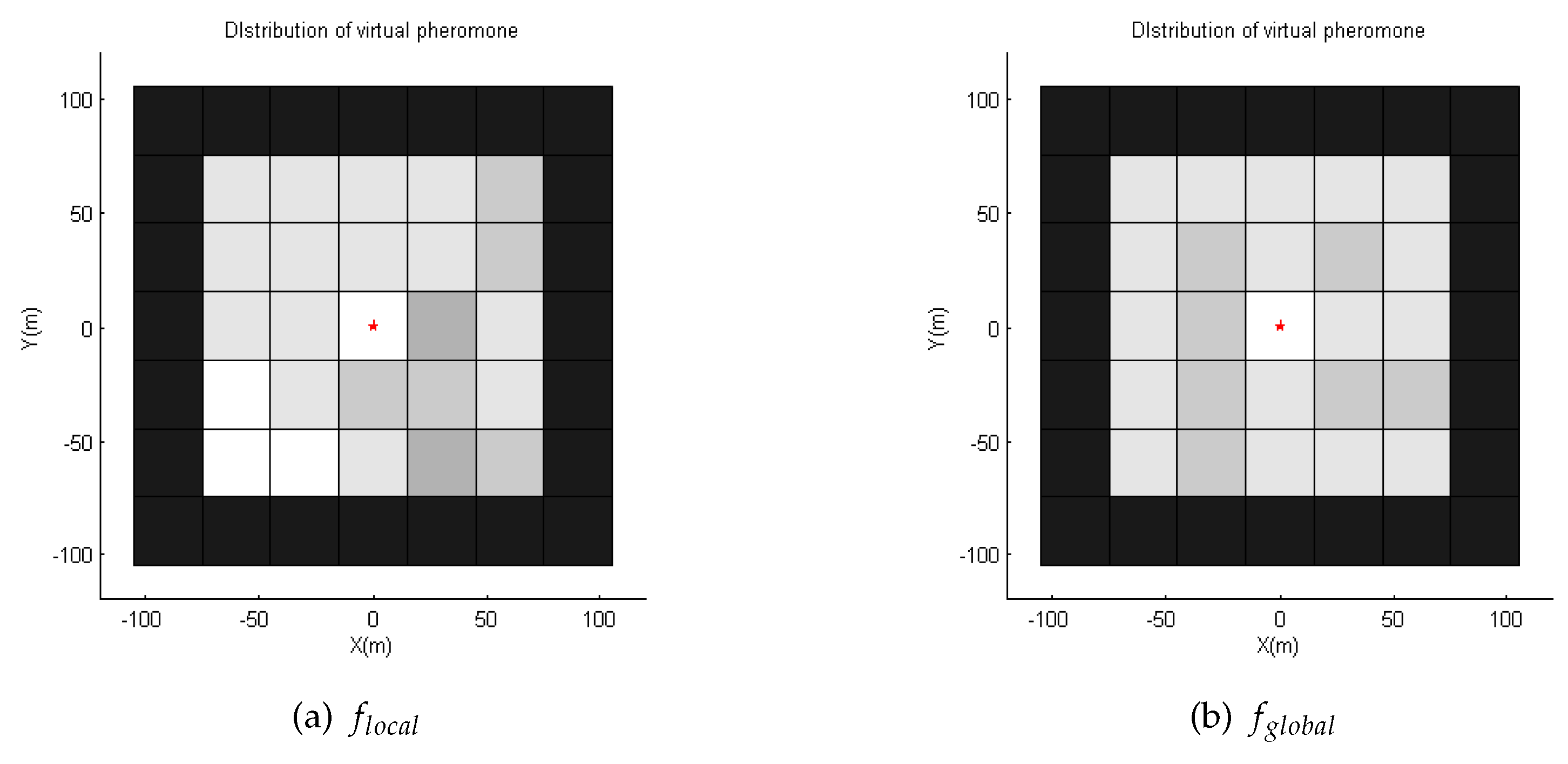
5.3. Improve Performance by Using Global Information
| Algorithm 3 Compress P into |
| Input:P, , Output:
|
| Algorithm 4 Get the next cell to visit according to pheromone matrix |
| Input:, Output:
|
- Check local matrix and go to a random cell whose pheromone density is 0.
- If no cell in equals 0, move to the cell with the lowest element in .
6. Simulation and Real-World Experiment
6.1. Simulation
6.2. Real-World Experiment
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, Z.; Huangfu, W.; Long, K.; Zhang, X.; Liu, X.; Zhong, B. On the designing principles and optimization approaches of bio-inspired self-organized network: A survey. Sci. China Inf. Sci. 2013, 56, 1–28. [Google Scholar] [CrossRef]
- Sendra, S.; Parra, L.; Lloret, J.; Khan, S. Systems and Algorithms for Wireless Sensor Networks Based on Animal and Natural Behavior. Int. J. Distrib. Sens. Netw. 2015, 11, 625972. [Google Scholar] [CrossRef]
- Hamidouche, R.; Aliouat, Z.; Gueroui, A.M.; Ari, A.A.A.; Louail, L. Classical and bio-inspired mobility in sensor networks for IoT applications. J. Netw. Comput. Appl. 2018, 121, 70–88. [Google Scholar] [CrossRef]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- 1000 Drones Dominate Southern China’s Night Sky in Record-Breaking Display for Lantern Festival. Available online: https://www.scmp.com/news/china/society/article/2070715/record-breaking-drone-display-staged-southern-china (accessed on 3 July 2019).
- Drone Swarms Are the New Fireworks Lighting Up China’s Skies. Available online: https://www.bloomberg.com/news/articles/2018-06-13/drone-swarms-are-the-new-fireworks-lighting-up-china-s-skies (accessed on 3 July 2019).
- Orfanus, D.; de Freitas, E.P.; Eliassen, F. Self-Organization as a Supporting Paradigm for Military UAV Relay Networks. IEEE Commun. Lett. 2016, 20, 804–807. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-Based IoT Platform: A Crowd Surveillance Use Case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- The Hundred-Tonne Robots That Help Keep New Zealand Running. Available online: https://www.markpack.org.uk/158474/the-hundred-tonne-robots-that-help-keep-new-zealand-running/ (accessed on 3 July 2019).
- Robots Sort Out Thousands of Flipkart Parcels in a Jiffy Minimising Delays in Delivery. Available online: https://www.nationalheraldindia.com/science-tech/robots-sort-out-thousands-of-flipkart-parcels-in-a-jiffy-minimising-delays-in-delivery (accessed on 3 July 2019).
- Robots add Glamour to Beijing’s Amazing Show at PyeongChang Olympics. Available online: http://en.people.cn/n3/2018/0312/c90000-9436002.html (accessed on 3 July 2019).
- Bikramaditya, D.; Subudhi, B.; Bhusan, P. Cooperative formation control of autonomous underwater vehicles: An overview. Int. J. Autom. Comput. 2016, 13, 199–225. [Google Scholar]
- Mintchev, S.; Donati, E.; Marrazza, S.; Stefanini, C. Mechatronic design of a miniature underwater robot for swarm operations. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 2938–2943. [Google Scholar]
- Danoy, G.; Brust, M.R.; Bouvry, P. Connectivity Stability in Autonomous Multi-level UAV Swarms for Wide Area Monitoring. In Proceedings of the 5th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, DIVANet ’15, Cancun, Mexico, 2–6 November 2015; ACM: New York, NY, USA, 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Gomez, C.; Purdie, H. UAV-based Photogrammetry and Geocomputing for Hazards and Disaster Risk Monitoring—A Review. Geoenviron. Disasters 2016, 3, 23. [Google Scholar] [CrossRef]
- Švec, P.; Thakur, A.; Raboin, E.; Shah, B.C.; Gupta, S.K. Target following with motion prediction for unmanned surface vehicle operating in cluttered environments. Auton. Robot. 2014, 36, 383–405. [Google Scholar] [CrossRef]
- Vasilijevic, A.; Calado, P.; Lopez-Castejon, F.; Hayes, D.; Stilinovic, N.; Nad, D.; Mandic, F.; Dias, P.; Gomes, J.; Molina, J.C.; et al. Heterogeneous robotic system for underwater oil spill survey. In Proceedings of the OCEANS 2015—Genova, Genoa, Italy, 18–21 May 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Guerrero-González, A.; García-Córdova, F.; Ortiz, F.J.; Alonso, D.; Gilabert, J. A multirobot platform based on autonomous surface and underwater vehicles with bio-inspired neurocontrollers for long-term oil spills monitoring. Auton. Robot. 2016, 40, 1321–1342. [Google Scholar] [CrossRef]
- Ziegwied, A.T.; Dobbin, V.; Dyer, S.; Pierpoint, C.; Sidorovskaia, N. Using Autonomous Surface Vehicles for Passive Acoustic Monitoring (PAM). In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Vasilijević, A.; Nad, D.; Mandić, F.; Mišković, N.; Vukić, Z. Coordinated Navigation of Surface and Underwater Marine Robotic Vehicles for Ocean Sampling and Environmental Monitoring. IEEE/ASME Trans. Mechatronics 2017, 22, 1174–1184. [Google Scholar] [CrossRef]
- COCORO: Robot Swarms Use Collective Cognition to Perform Tasks. Available online: https://ec.europa.eu/digital-single-market/en/news/cocoro-robot-swarms-use-collective-cognition-perform-tasks (accessed on 3 July 2019).
- Amory, A.; Tosik, T.; Maehle, E. A Load Balancing Behavior for Underwater Robot Swarms to Increase Mission Time and Fault Tolerance. In Proceedings of the 2014 IEEE International Parallel Distributed Processing Symposium Workshops, Phoenix, AZ, USA, 19–23 May 2014; pp. 1306–1313. [Google Scholar] [CrossRef]
- Kim, T.; Kim, J.; Byun, S.W. A Comparison of Nonlinear Filter Algorithms for Terrain-referenced Underwater Navigation. Int. J. Control. Autom. Syst. 2018, 16, 2977–2989. [Google Scholar] [CrossRef]
- Dai, T.; Miao, L.; Guo, Y. A Real-Time Mismatch Detection Method for Underwater Database-Referenced Navigation. Sensors 2019, 19, 307. [Google Scholar] [CrossRef] [PubMed]
- Dai, T.; Miao, L.; Shao, H.; Shi, Y. Solving Gravity Anomaly Matching Problem Under Large Initial Errors in Gravity Aided Navigation by Using an Affine Transformation Based Artificial Bee Colony Algorithm. Front. Neurorobot. 2019, 13, 19. [Google Scholar] [CrossRef] [PubMed]
- Cui, Q.; Liu, P.; Wang, J.; Yu, J. Brief analysis of drone swarms communication. In Proceedings of the IEEE International Conference on Unmanned Systems, Miami, FL USA, 13–16 June 2017; pp. 463–466. [Google Scholar]
- Li, M.; Lu, K.; Zhu, H.; Chen, M.; Mao, S.; Prabhakaran, B. Robot swarm communication networks: Architectures, protocols, and applications. In Proceedings of the International Conference on Communications and NETWORKING in China, Hangzhou, China, 25–27 August 2008; pp. 162–166. [Google Scholar]
- Qiao, G.; Babar, Z.; Ma, L.; Liu, S.; Wu, J. MIMO-OFDM underwater acoustic communication systems—A review. Phys. Commun. 2017, 23, 56–64. [Google Scholar] [CrossRef]
- Kilfoyle, D.; Baggeroer, A. The state of the art in underwater acoustic telemetry. J. Netw. Comput. Appl. 2002, 25, 4–27. [Google Scholar] [CrossRef]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. A survey on routing techniques in underwater wireless sensor networks. J. Netw. Comput. Appl. 2011, 34, 1908–1927. [Google Scholar] [CrossRef]
- Hanson, F.; Radic, S. High bandwidth underwater optical communication. Appl. Opt. 2008, 47, 277–283. [Google Scholar] [CrossRef]
- Lanbo, L.; Shengli, Z.; Jun-Hong, C. Prospects and problems of wireless communication for underwater sensor networks. Wirel. Commun. Mob. Comput. 2010, 8, 977–994. [Google Scholar] [CrossRef]
- Pompili, D.; Akyildiz, I.F. Overview of networking protocols for underwater wireless communications. Commun. Mag. IEEE 2009, 47, 97–102. [Google Scholar] [CrossRef]
- Arnon, S.; Kedar, D. Non-line-of-sight underwater optical wireless communication network. J. Opt. Soc. Am. A Opt. Image Sci. Vis. 2009, 26, 530–539. [Google Scholar] [CrossRef] [PubMed]
- Janjua, B.; Ooi, B.S.; Tsai, C.T.; Lin, G.R.; Kuo, H.C.; Oubei, H.M.; Wang, H.Y.; Duran, J.R.; He, J.H.; Alouini, M.S. 4.8 Gbit/s 16-QAM-OFDM transmission based on compact 450-nm laser for underwater wireless optical communication. Opt. Express 2015, 23, 23302–23309. [Google Scholar]
- Oubei, H.M.; Li, C.; Park, K.H.; Ng, T.K.; Alouini, M.S.; Ooi, B.S. 2.3 Gbit/s underwater wireless optical communications using directly modulated 520 nm laser diode. Opt. Express 2015, 23, 20743–20748. [Google Scholar] [CrossRef] [PubMed]
- Wu, T.C.; Chi, Y.C.; Wang, H.Y. Blue Laser Diode Enables Underwater Communication at 12.4 Gbps. Sci. Rep. 2017, 7, 40480. [Google Scholar] [CrossRef] [PubMed]
- Domingo, M.C. Magnetic Induction for Underwater Wireless Communication Networks. IEEE Trans. Antennas Propag. 2012, 60, 2929–2939. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, P.; Sun, Z. Realizing underwater communication through magnetic induction. Commun. Mag. IEEE 2015, 53, 42–48. [Google Scholar] [CrossRef]
- Su, B.; Che, F.a. Research on Underwater Communication by current Field through silt layer. In Proceedings of the International Conference on Future Communication and Computer Technology (ICFCCT 2012), Beijing, China, 19–20 May 2012; pp. 116–120. [Google Scholar]
- Su, B.P. High Sediment Concentration Underwater Communication Using Current Field. Appl. Mech. Mater. 2013, 475–476, 45–49. [Google Scholar] [CrossRef]
- Sun, K.; Wang, X.; Li, Z. Application of underwater wireless optical communication technology in seafloor observatory network. Bol. Tec. Bull. 2017, 55, 456–464. [Google Scholar]
- Li, M.; Guo, S.; Guo, J. Development of a biomimetic underwater microrobot for a father-son robot system. Microsyst. Technol. Nanosyst. Storage Process. Syst. 2017, 23, 849–861. [Google Scholar] [CrossRef]
- Beni, G. From Swarm Intelligence to Swarm Robotics. In Proceedings of the International Workshop on Swarm Robotics, Santa Monica, CA, USA, 17 July 2004; pp. 1–9. [Google Scholar]
- Lima, D.A.; Oliveira, G.M. A cellular automata ant memory model of foraging in a swarm of robots. Appl. Math. Model. 2017, 47, 551–572. [Google Scholar] [CrossRef]
- Lima, D.A.; Tinoco, C.R.; Oliveira, G.M.B. A Cellular Automata Model with Repulsive Pheromone for Swarm Robotics in Surveillance; Springer International Publishing: Cham, Germany, 2016; pp. 312–322. [Google Scholar]
- Zedadra, O.; Seridi, H.; Jouandeau, N.; Fortino, G. Design and analysis of cooperative and non cooperative stigmergy-based models for foraging. In Proceedings of the IEEE International Conference on Computer Supported Cooperative Work in Design, Calabria, Italy, 6–8 May 2015; pp. 85–90. [Google Scholar]
- Simonin, O.; Charpillet, F.; Thierry, E. Revisiting wavefront construction with collective agents: an approach to foraging. Swarm Intell. 2014, 8, 113–138. [Google Scholar] [CrossRef]
- Schroeder, A.; Ramakrishnan, S.; Kumar, M.; Trease, B. Efficient spatial coverage by a robot swarm based on an ant foraging model and the Lévy distribution. Swarm Intell. 2017, 11, 39–69. [Google Scholar] [CrossRef]
- Schroeder, A.M.; Kumar, M. Design of Decentralized Chemotactic Control Law for Area Coverage using Swarm of Mobile Robots. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 4317–4322. [Google Scholar]
- Lu, Q.; Hecker, J.P.; Moses, M.E. The MPFA: A multiple-place foraging algorithm for biologically-inspired robot swarms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 3815–3821. [Google Scholar]
- Shen, D.; Wei, R.X.; Ru, C.J. Digital-pheromone-based control method for UAV swarm search. Syst. Eng. Electron. 2013, 35, 591–596. [Google Scholar]
- Yang, F.; Ji, X.; Yang, C. Cooperative Search of UAV Swarm Based on Improved Ant Colony Algorithm in Uncertain Environment. In Proceedings of the IEEE International Conference on Unmanned Systems, Beijing, China, 27–29 October 2017; pp. 231–236. [Google Scholar]
- Takahashi, R.; Takimoto, M.; Kambayashi, Y. Cooperative Transportation Using Pheromone Agents. In Proceedings of the 6th International Conference on Agents and Artificial Intelligence, Angers, France, 6–8 March 2014; pp. 46–62. [Google Scholar]
- Schmickl, T.; Crailsheim, K. Trophallaxis Within a Robotic Swarm: Bio-Inspired Communication Among Robots in a Swarm. Auton. Robot. 2008, 25, 171–188. [Google Scholar] [CrossRef]
- Rajan, R.; Otte, M.; Sofge, D. Novel Physicomimetic Bio-inspired Algorithm for Search and Rescue Applications. In Proceedings of the IEEE Symposium Series on Computational Intelligence, Honolulu, HI, USA, 27 November–1 December 2017; pp. 1869–1876. [Google Scholar]
- Li, W. Persistent surveillance for a swarm of micro aerial vehicles by flocking algorithm. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2015, 229, 185–194. [Google Scholar] [CrossRef]
- Sauter, J.A.; Riddle, S. Distributed Pheromone-Based Swarming Control of Unmanned Air and Ground Vehicles for RSTA. In Proceedings of the SPIE Defense and Security Symposium, Orlando, FL, USA, 16–20 March 2008; p. 69620C. [Google Scholar] [CrossRef]
- Lu, Q.; Hecker, J.P.; Moses, M.E. Multiple-place swarm foraging with dynamic depots. Auton. Robot. 2018, 42, 909–926. [Google Scholar] [CrossRef]
- Hecker, J.P.; Moses, M.E. Beyond pheromones: evolving error-tolerant, flexible, and scalable ant-inspired robot swarms. Swarm Intell. 2015, 9, 43–70. [Google Scholar] [CrossRef]
- Aznar, F.; Pujol, M.; Rizo, R.; Rizo, C. Modelling multi-rotor UAVs swarm deployment using virtual pheromones. PLoS ONE 2018, 13, e0190692. [Google Scholar] [CrossRef]
- Kuyucu, T.; Tanev, I.; Shimohara, K. Superadditive effect of multi-robot coordination in the exploration of unknown environments via stigmergy. Neurocomputing 2015, 148, 83–90. [Google Scholar] [CrossRef]
- Fujisawa, R.; Dobata, S.; Sugawara, K. Designing pheromone communication in swarm robotics: Group foraging behavior mediated by chemical substance. Swarm Intell. 2014, 8, 227–246. [Google Scholar] [CrossRef]
- Fujisawa, R.; Dobata, S.; Sasaki, Y.; Takisawa, R.; Matsuno, F. Collision-induced “Priority rule” governs efficiency of pheromone-communicating swarm robots. In Proceedings of the International Conference on Swarm Intelligence, Brussels, Belgium, 12–14 September 2012; pp. 228–235. [Google Scholar]
- Fujisawa, R.; Imamura, H.; Hashimoto, T.; Matsuno, F. Communication using pheromone field for multiple robots. In Proceedings of the IEEE/RSJ 2008 International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1391–1396. [Google Scholar]
- Fujisawa, R.; Dobata, S. Levy walk enhances efficiency of group foraging in pheromone-communicating swarm robots. In Proceedings of the IEEE/SICE International Symposium on System Integration, Kobe, Japan, 15–17 December 2013; pp. 808–813. [Google Scholar]
- Arvin, F.; Krajník, T.; Turgut, A.E.; Yue, S. COS Phi: Artificial pheromone system for robotic swarms research. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 407–412. [Google Scholar]
- Le, V.T.; Ngo, T.D. Virtual pheromone based information foraging in modular robotics. In Proceedings of the International Conference on Ubiquitous Robots and Ambient Intelligence, Goyang City, Korea, 28–30 October 2015; pp. 379–384. [Google Scholar]
- Niimi, A.; Kawakami, C.; Fukuda, K. Development of the Compact Swarm Robot System Based on Pheromone Communication—An Improvement Approach for Position Measurement System. In Proceedings of the 56th Annual Conference of the Society-of-Instrument-and-Control-Engineers-of-Japan (SICE), Kanazawa, Japan, 19–22 September 2017; pp. 1439–1442. [Google Scholar]
- Ge, S.; Gang, T. Adaptive leader-following state consensus of multiagent systems with switching topology. Int. J. Adapt. Control. Signal Process. 2018, 32, 1508–1528. [Google Scholar]
- Kim, J. Multirobot Exploration While Building Power-Efficient Sensor Networks in Three Dimensions. IEEE Trans. Cybern. 2019, 49, 2771–2778. [Google Scholar] [CrossRef] [PubMed]
- Jia, Q.; Xu, H.; Li, G.; Gu, H.; Feng, X. Research on Synergy Pursuit Strategy of Multiple Underwater Robots. J. Intell. Robot. Syst. 2019. [Google Scholar] [CrossRef]
- Miao, R.; Pang, S.; Jiang, D.; Dong, Z. Complete coverage path planning for autonomous marine vehicle used in multi-bay areas. Acta Geod. Cartogr. Sin. 2019, 48, 256–264. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Marker | Description |
|---|---|
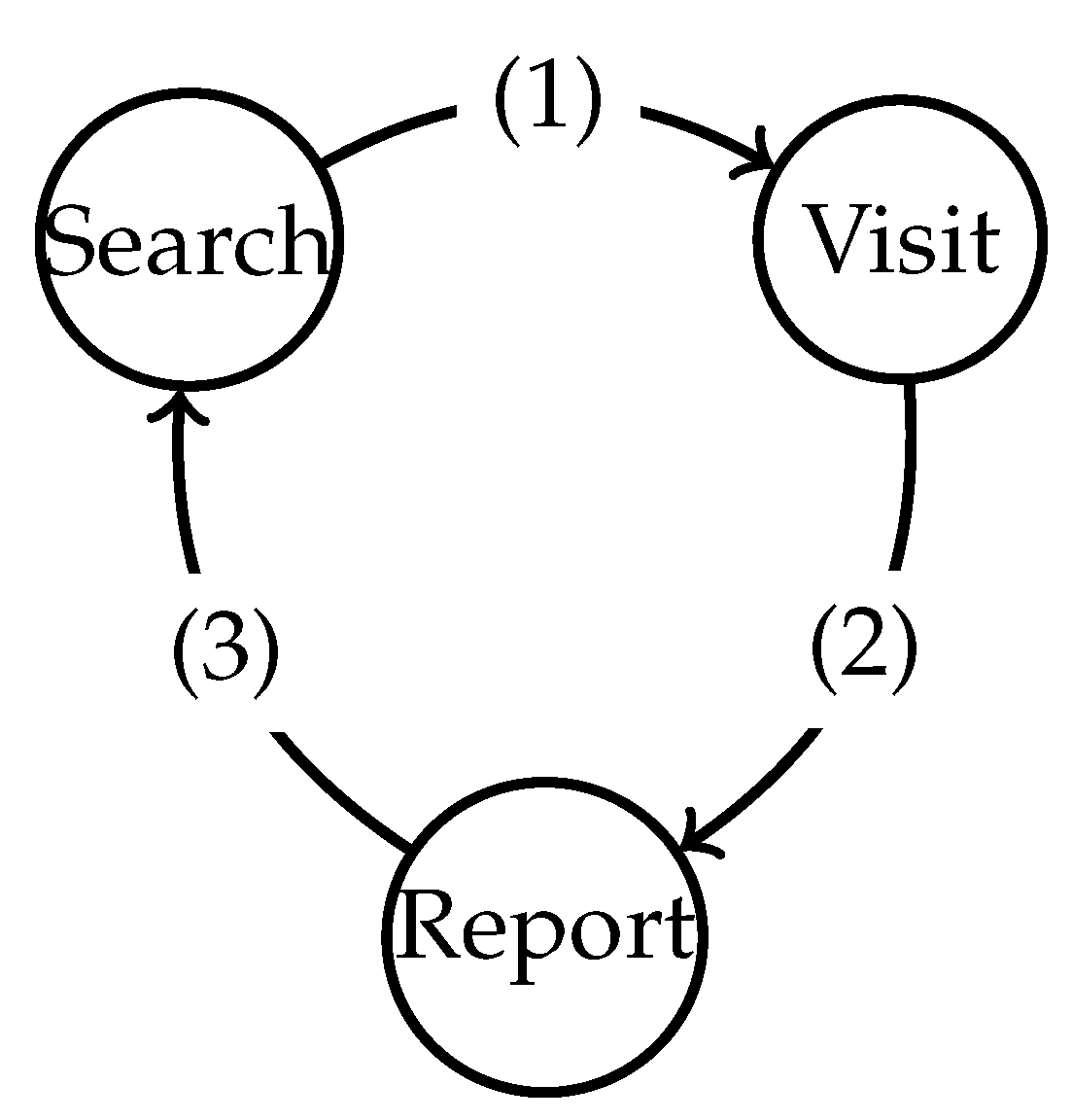
| (1) | Monitor the environment and search for a period of |
| (2) | Reach the nearest communication node |
| (3) | Finish exchanging data with the communication node |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, G.; Chen, C.; Geng, C.; Li, M.; Xu, H.; Lin, Y. A Pheromone-Inspired Monitoring Strategy Using a Swarm of Underwater Robots. Sensors 2019, 19, 4089. https://doi.org/10.3390/s19194089
Li G, Chen C, Geng C, Li M, Xu H, Lin Y. A Pheromone-Inspired Monitoring Strategy Using a Swarm of Underwater Robots. Sensors. 2019; 19(19):4089. https://doi.org/10.3390/s19194089
Chicago/Turabian StyleLi, Guannan, Chao Chen, Chao Geng, Meng Li, Hongli Xu, and Yang Lin. 2019. "A Pheromone-Inspired Monitoring Strategy Using a Swarm of Underwater Robots" Sensors 19, no. 19: 4089. https://doi.org/10.3390/s19194089
APA StyleLi, G., Chen, C., Geng, C., Li, M., Xu, H., & Lin, Y. (2019). A Pheromone-Inspired Monitoring Strategy Using a Swarm of Underwater Robots. Sensors, 19(19), 4089. https://doi.org/10.3390/s19194089