Measurement of Three-Dimensional Structural Displacement Using a Hybrid Inertial Vision-Based System


Abstract
1. Introduction
2. The Proposed HIVBDM System Overview
3. Procedures and Designs of the Proposed HIVBDM System
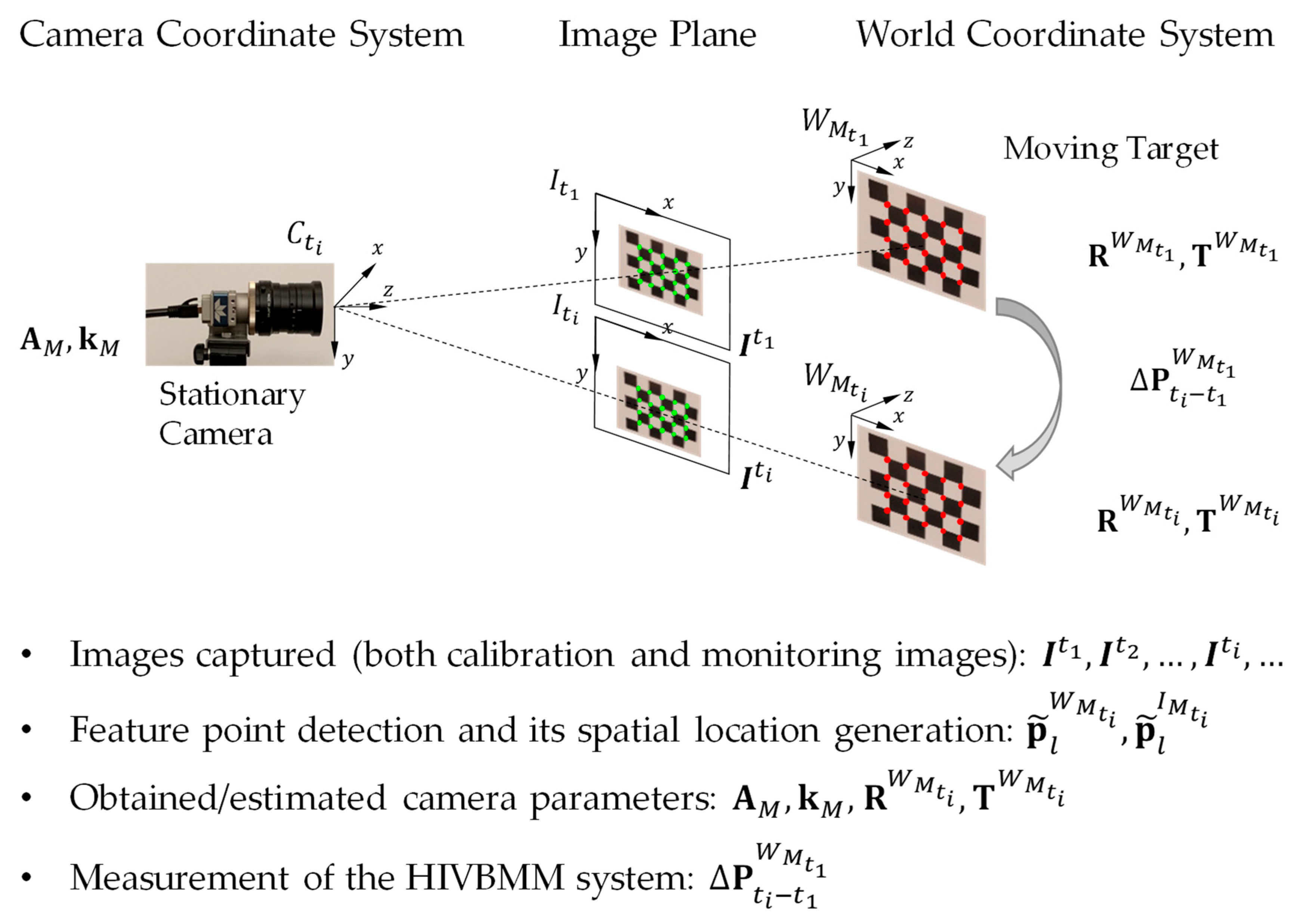
3.1. Relative Displacement Measurements between the Camera and Structure Using a Stationary Camera
3.2. Relative Displacement Measurements between the Camera and Structure Using a Moving Camera
3.2.1. Camera Movement Compensation Using a Stationary Calibration Target
3.2.2. Camera Movement Compensation Using a Stationary Calibration Target with an Attached Tilt Sensor
4. Experimental Results
4.1. Implementation of the Camera Calibration Algorithm
4.2. Evaluations of the Relative Displacement Measurements between the Camera and Target Using a Stationary Camera
4.3. Evaluations of the Relative Displacement Measurements between the Camera and Target Using a Moving Camera
4.3.1. Evaluation on the Synthetic Target Displacements
4.3.2. Validation of Exact Camera Movements by Using a LVDT Sensor
4.3.3. Evaluation on the Long-Term Indoor Monitoring Process
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Lynch, J.P.; Farrar, C.R.; Michaels, J.E. Structural health monitoring: Technological advances to practical implementations. Proc. IEEE 2016, 104, 1508–1512. [Google Scholar] [CrossRef]
- Cho, S.; Spencer, B.F., Jr. Sensor attitude correction of wireless sensor network for acceleration-based monitoring of civil structures. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 859–871. [Google Scholar] [CrossRef]
- Park, J.W.; Moon, D.S.; Yoon, H.; Gomez, F.; Spencer, B.F., Jr.; Kim, J.R. Visual-inertial displacement sensing using data fusion of vision-based displacement with acceleration. Struct. Control Health Monit. 2018, 25, e2122. [Google Scholar] [CrossRef]
- Im, S.B.; Hurlebaus, S.; Kang, Y.J. Summary review of GPS technology for structural health monitoring. J. Struct. Eng. 2011, 139, 1653–1664. [Google Scholar] [CrossRef]
- Park, H.S.; Lee, H.M.; Adeli, H.; Lee, I. A New Approach for Health Monitoring of Structures: Terrestrial Laser Scanning. Comput. Civ. Infrastruct. Eng. 2007, 22, 19–30. [Google Scholar] [CrossRef]
- Li, C.; Chen, W.; Liu, G.; Yan, R.; Xu, H.; Qi, Y. A Noncontact FMCW Radar Sensor for Displacement Measurement in Structural Health Monitoring. Sensors 2015, 15, 7412–7433. [Google Scholar] [CrossRef]
- Bettini, P.; Guerreschi, E.; Sala, G. Development and Experimental Validation of a Numerical Tool for Structural Health and Usage Monitoring Systems Based on Chirped Grating Sensors. Sensors 2015, 15, 1321–1341. [Google Scholar] [CrossRef]
- Xiao, F.; Chen, G.S.; Hulsey, J.L. Monitoring Bridge Dynamic Responses Using Fiber Bragg Grating Tiltmeters. Sensors 2017, 17, 2390. [Google Scholar] [CrossRef]
- García, I.; Zubia, J.; Durana, G.; Aldabaldetreku, G.; Illarramendi, M.A.; Villatoro, J. Optical Fiber Sensors for Aircraft Structural Health Monitoring. Sensors 2015, 15, 15494–15519. [Google Scholar] [CrossRef]
- Bremer, K.; Weigand, F.; Zheng, Y.; Alwis, L.S.; Helbig, R.; Roth, B. Structural Health Monitoring Using Textile Reinforcement Structures with Integrated Optical Fiber Sensors. Sensors 2017, 17, 345. [Google Scholar] [CrossRef]
- Güemes, A.; Fernández-López, A.; Díaz-Maroto, P.F.; Lozano, Á.; Sierra-Perez, J. Structural Health Monitoring in Composite Structures by Fiber-Optic Sensors. Sensors 2018, 18, 1094. [Google Scholar] [CrossRef] [PubMed]
- Mei, H.; Haider, M.F.; Joseph, R.; Migot, A.; Giurgiutiu, V. Recent Advances in Piezoelectric Wafer Active Sensors for Structural Health Monitoring Applications. Sensors 2019, 19, 383. [Google Scholar] [CrossRef] [PubMed]
- Malekjafarian, A.; McGetrick, P.J.; Obrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. Drive-by bridge damage monitoring using Bridge Displacement Profile Difference. J. Civ. Struct. Health Monit. 2016, 6, 839–850. [Google Scholar] [CrossRef]
- Obrien, E.J.; Malekjafarian, A. A mode shape-based damage detection approach using laser measurement from a vehicle crossing a simply supported bridge. Struct. Control Health Monit. 2016, 23, 1273–1286. [Google Scholar] [CrossRef]
- Fitzgerald, P.C.; Malekjafarian, A.; Bhowmik, B.; Prendergast, L.J.; Cahill, P.; Kim, C.W.; Hazra, B.; Pakrashi, V.; Obrien, E.J. Scour Damage Detection and Structural Health Monitoring of a Laboratory-Scaled Bridge Using a Vibration Energy Harvesting Device. Sensors 2019, 19, 2572. [Google Scholar] [CrossRef] [PubMed]
- Fitzgerald, P.C.; Malekjafarian, A.; Cantero, D.; Obrien, E.J.; Prendergast, L.J. Drive-by scour monitoring of railway bridges using a wavelet-based approach. Eng. Struct. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. Drive-By Bridge Frequency Identification under Operational Roadway Speeds Employing Frequency Independent Underdamped Pinning Stochastic Resonance (FI-UPSR). Sensors 2018, 18, 4207. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Huang, Y.; Zheng, W.; Zhou, Z.; Liu, D.; Lu, M. Combining Convolutional Neural Network and Self-Adaptive Algorithm to Defeat Synthetic Multi-Digit Text-Based CAPTCHA. In Proceedings of the IEEE International Conference on Industrial Technology, Toronto, ON, Canada, 22–25 March 2017; pp. 980–985. [Google Scholar]
- Wang, Y.; Lu, M. A Self-Adaptive Algorithm to Defeat Text-Based CAPTCHA. In Proceedings of the IEEE International Conference on Industrial Technology, Taipei, Taiwan, 14–17 March 2016; pp. 720–725. [Google Scholar]
- Wang, Y.; Lu, M. An Optimized System to Solve Text-Based Captcha. Int. J. Artif. Intell. Appl. 2018, 9, 19–36. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, X. Effective Real-Scenario Video Copy Detection. In Proceedings of the 2016 IEEE International Conference on Pattern Recognition, Cancun, Mexico, 4–8 December 2016; pp. 3951–3956. [Google Scholar]
- Wang, Y.; Wang, H.; Zhang, X.; Chaspari, T.; Choe, Y.; Lu, M. An Attention-aware Bidirectional Multi-residual Recurrent Neural Network (Abmrnn): A Study about Better Short-term Text Classification. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing, Brighton, UK, 12–17 May 2019; pp. 3582–3586. [Google Scholar]
- Wang, Y.; Zhou, Z.; Jin, S.; Liu, D.; Lu, M. Comparisons and Selections of Features and Classifiers for Short Text Classification. IOP Conf. Ser. Mater. Sci. Eng. 2017, 261, 012018. [Google Scholar] [CrossRef]
- Baqersad, J.; Poozesh, P.; Niezrecki, C.; Avitabile, P. Photogrammetry and optical methods in structural dynamics—A review. Mech. Syst. Signal Process. 2017, 86, 17–34. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q. Computer vision for SHM of civil infrastructure: From dynamic response measurement to damage detection—A review. Eng. Struct. 2018, 156, 105–117. [Google Scholar] [CrossRef]
- Xu, Y.; Brownjohn, J.M. Review of machine-vision based methodologies for displacement measurement in civil structures. J. Civ. Struct. Health Monit. 2018, 8, 91–110. [Google Scholar] [CrossRef]
- Khuc, T.; Catbas, F.N. Structural identification using computer vision-based bridge health monitoring. J. Struct. Eng. 2017, 144, 04017202. [Google Scholar] [CrossRef]
- Zhang, X.; Rajan, D.; Story, B. Concrete crack detection using context-aware deep semantic segmentation network. Comput. Civ. Infrastruct. Eng. 2019, 1–21. [Google Scholar] [CrossRef]
- Bao, Y.; Tang, Z.; Li, H.; Zhang, Y. Computer vision and deep learning-based data anomaly detection method for structural health monitoring. Struct. Health Monit. 2019, 18, 401–421. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, X.; Story, B.; Rajan, D. Accurate Vehicle Detection Using Multi-Camera Data Fusion and Machine Learning. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Brighton, UK, 12–17 May 2019; pp. 3767–3771. [Google Scholar]
- Feng, D.; Feng, M.Q. Vision-based multipoint displacement measurement for structural health monitoring. Struct. Control Health Monit. 2016, 23, 876–890. [Google Scholar] [CrossRef]
- Dong, C.; Ye, X.; Jin, T. Identification of structural dynamic characteristics based on machine vision technology. Measurement 2018, 126, 405–416. [Google Scholar] [CrossRef]
- Mao, J.X.; Wang, H.; Feng, D.M.; Tao, T.Y.; Zheng, W.Z. Investigation of dynamic properties of long-span cable-stayed bridges based on one-year monitoring data under normal operating condition. Struct. Control Health Monit. 2018, 25, e2146. [Google Scholar] [CrossRef]
- Fioriti, V.; Roselli, I.; Tatì, A.; Romano, R.; De Canio, G. Motion Magnification Analysis for structural monitoring of ancient constructions. Measurement 2018, 129, 375–380. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M.Q.; Ozer, E.; Fukuda, Y. A Vision-Based Sensor for Noncontact Structural Displacement Measurement. Sensors 2015, 15, 16557–16575. [Google Scholar] [CrossRef] [PubMed]
- Khuc, T.; Catbas, F.N. Completely contactless structural health monitoring of real-life structures using cameras and computer vision. Struct. Control Health Monit. 2017, 24, e1852. [Google Scholar] [CrossRef]
- Khuc, T.; Catbas, F.N. Computer vision-based displacement and vibration monitoring without using physical target on structures. Struct. Infrastruct. Eng. 2017, 13, 505–516. [Google Scholar] [CrossRef]
- Won, J.; Park, J.-W.; Park, K.; Yoon, H.; Moon, D.S. Non-Target Structural Displacement Measurement Using Reference Frame-Based Deepflow. Sensors 2019, 19, 2992. [Google Scholar] [CrossRef] [PubMed]
- Yoon, H.; Shin, J.; Spencer, B.F., Jr. Structural displacement measurement using an unmanned aerial system. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 183–192. [Google Scholar] [CrossRef]
- Chen, J.G.; Davis, A.; Wadhwa, N.; Durand, F.; Freeman, W.T.; Büyüköztürk, O. Video camera-based vibration measurement for civil infrastructure applications. J. Infrastruct. Syst. 2016, 23, B4016013. [Google Scholar] [CrossRef]
- Lee, J.; Lee, K.C.; Cho, S.; Sim, S.H. Computer Vision-Based Structural Displacement Measurement Robust to Light-Induced Image Degradation for In-Service Bridges. Sensors 2017, 17, 2317. [Google Scholar] [CrossRef]
- Zeinali, Y.; Li, Y.; Rajan, D.; Story, B.A. Accurate Structural Dynamic Response Monitoring of Multiple Structures Using One CCD Camera and a Novel Targets Configuration. In Proceedings of the International Workshop on Structural Health Monitoring, Palo Alto, CA, USA, 12–14 September 2017; pp. 12–14. [Google Scholar]
- Kahn-Jetter, Z.L.; Chu, T.C.; Chu, T. Three-dimensional displacement measurements using digital image correlation and photogrammic analysis. Exp. Mech. 1990, 30, 10–16. [Google Scholar] [CrossRef]
- Yu, L.; Pan, B. Single-camera high-speed stereo-digital image correlation for full-field vibration measurement. Mech. Syst. Signal Process. 2017, 94, 374–383. [Google Scholar] [CrossRef]
- He, L.; Tan, J.; Hu, Q.; He, S.; Cai, Q.; Fu, Y.; Tang, S. Non-Contact Measurement of the Surface Displacement of a Slope Based on a Smart Binocular Vision System. Sensors 2018, 18, 2890. [Google Scholar] [CrossRef]
- Franco, J.M.; Mayag, B.M.; Marulanda, J.; Thomson, P. Static and dynamic displacement measurements of structural elements using low cost RGB-D cameras. Eng. Struct. 2017, 153, 97–105. [Google Scholar] [CrossRef]
- Abdelbarr, M.; Chen, Y.L.; Jahanshahi, M.R.; Masri, S.F.; Shen, W.M.; Qidwai, U.A. 3D dynamic displacement-field measurement for structural health monitoring using inexpensive RGB-D based sensor. Smart Mater. Struct. 2017, 26, 125016. [Google Scholar] [CrossRef]
- Gorjup, D.; Slavič, J.; Boltežar, M. Frequency domain triangulation for full-field 3D operating-deflection-shape identification. Mech. Syst. Signal Process. 2019, 133, 106287. [Google Scholar] [CrossRef]
- Kuddus, M.A.; Li, J.; Hao, H.; Li, C.; Bi, K. Target-free vision-based technique for vibration measurements of structures subjected to out-of-plane movements. Eng. Struct. 2019, 190, 210–222. [Google Scholar] [CrossRef]
- Hoskere, V.; Park, J.W.; Yoon, H.; Spencer, B.F., Jr. Vision-Based Modal Survey of Civil Infrastructure Using Unmanned Aerial Vehicles. J. Struct. Eng. 2019, 145, 04019062. [Google Scholar] [CrossRef]
- Greenwood, W.W.; Lynch, J.P.; Zekkos, D. Applications of UAVs in Civil Infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Yoon, H.; Hoskere, V.; Park, J.-W.; Spencer, B.F. Cross-Correlation-Based Structural System Identification Using Unmanned Aerial Vehicles. Sensors 2017, 17, 2075. [Google Scholar] [CrossRef]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Marquardt, D.W. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Burger, W. Zhang’s Camera Calibration Algorithm: In Depth Tutorial and Implementation. Technical Report HGB16-05; University of Applied Sciences Upper Austria: Hagenberg, Austria, 2016. [Google Scholar]
- CX1 Network Accelerometer & Inclinometer User Guide. Available online: https://sensr.com/Product/CX1 (accessed on 18 September 2019).
- Faugeras, O. Three-Dimensional Computer Vision: A Geometric Viewpoint; MIT Press: Cambridge, MA, USA, 1993. [Google Scholar]
- Genie Nano User Manual. Available online: https://www.teledynedalsa.com/en/products/imaging/cameras/genie-nano-1gige/ (accessed on 18 September 2019).
- Geiger, A.; Moosmann, F.; Car, Ö.; Schuster, B. Automatic Camera and Range Sensor Calibration Using a Single Shot. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 3936–3943. [Google Scholar]
- Hibbeler, R.C. Structural Analysis, 7th ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2009. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| Input image sequence from time to time , | |
| Camera coordinate system at time | |
| Image plane at time | |
| World coordinate system of the stationary structure at time | |
| World coordinate system of the moving structure at time | |
| World coordinate system of the camera at time | |
| 3 × 3 intrinsic camera parameter obtained from the stationary structure | |
| 1 × 4 camera distortion (warping) parameter obtained from the stationary structure | |
| 3 × 3 intrinsic camera parameter obtained from the moving structure | |
| 1 × 4 camera distortion (warping) parameter obtained from the moving structure | |
| 3 × 3 rotation matrix of the camera in the world coordinate system of the stationary structure at time | |
| 3 × 1 translation vector of the camera in the world coordinate system of the stationary structure at time | |
| 3 × 3 rotation matrix of the camera in the world coordinate system of the moving structure at time | |
| 3 × 1 translation vector of the camera in the world coordinate system of the moving structure at time | |
| 3 × 1 obtained difference of the camera rotation vector from time to time using an attached tilt sensor | |
| 3 × 3 obtained difference of the camera rotation matrix converted from using the Rodrigues formula | |
| 2 × 1 pixel-wise location of the detected feature points on the stationary calibration target at time | |
| 2 × 1 pixel-wise location of the detected feature points on the moving calibration target at time | |
| 3 × 1 spatial location of the detected feature points on the stationary calibration target at time | |
| 3 × 1 spatial location of the detected feature points on the moving calibration target at time | |
| 3 × 1 spatial location of the monitored point at time in the camera coordinate system at time | |
| 3 × 1 spatial location of the monitored point at time in the world coordinate system of the stationary structure at time | |
| 3 × 1 spatial location of the monitored point at time in the world coordinate system of the moving structure at time | |
| 3 × 1 measured structural displacement from time to time in the world coordinate system of the moving structure at time | |
| The world coordinate system is associated with the structure that is being monitored, and the world coordinate system only exists in the camera movement compensation. The structural displacements can only be calculated within the same coordinate system. | |
| Actual Static Target Displacements in X, Y and Z Directions | Static Target Displacement Measurements in X, Y and Z Directions | |||||||
|---|---|---|---|---|---|---|---|---|
| With Averaging Processing | Without Averaging Processing | |||||||
| X | Y | Z | X | Y | Z | X | Y | Z |
| 0.000 | 0.000 | 0.000 | 0.008 | −0.029 | 0.304 | 0.006 | −0.043 | 0.555 |
| 1.588 | 0.000 | 0.000 | 1.719 | −0.043 | −0.729 | 1.727 | −0.039 | −0.797 |
| 3.175 | 0.000 | 0.000 | 3.491 | −0.131 | 0.273 | 3.480 | −0.111 | −0.138 |
| 6.350 | 0.000 | 0.000 | 6.831 | −0.133 | −0.672 | 6.829 | −0.034 | −2.090 |
| 12.700 | 0.000 | 0.000 | 13.066 | −0.296 | 0.140 | 13.075 | −0.266 | −0.595 |
| 25.400 | 0.000 | 0.000 | 26.063 | −0.575 | 1.266 | 26.061 | −0.541 | 0.740 |
| 50.800 | 0.000 | 0.000 | 51.224 | −1.039 | 3.476 | 51.175 | −1.029 | 3.432 |
| RMSE of X Direction Static Target Measurements: | 0.397 () | 0.468 () | 1.457 () | 0.389 () | 0.453 () | 1.604 () | ||
| X | Y | Z | X | Y | Z | X | Y | Z |
| 0.000 | 0.000 | 0.000 | 0.023 | 0.008 | 0.295 | −0.015 | −0.024 | 0.037 |
| 0.000 | 1.588 | 0.000 | −0.242 | 1.573 | −1.624 | −0.220 | 1.606 | −1.430 |
| 0.000 | 3.175 | 0.000 | −0.377 | 3.281 | −2.711 | −0.431 | 3.285 | −3.116 |
| 0.000 | 6.350 | 0.000 | −0.142 | 6.294 | −2.115 | −0.125 | 6.287 | −2.143 |
| 0.000 | 12.700 | 0.000 | −0.097 | 12.676 | −0.625 | −0.276 | 12.653 | −1.973 |
| 0.000 | 25.400 | 0.000 | −0.154 | 25.527 | −1.376 | −0.215 | 25.514 | −1.712 |
| 0.000 | 50.800 | 0.000 | −0.246 | 50.861 | −3.533 | −0.250 | 50.871 | −3.133 |
| RMSE of Y Direction Static Target Measurements: | 0.212 () | 0.071 () | 2.046 () | 0.249 () | 0.073 () | 2.171 () | ||
| X | Y | Z | X | Y | Z | X | Y | Z |
| 0.000 | 0.000 | 0.000 | 0.014 | 0.039 | −0.039 | −0.022 | 0.014 | −0.633 |
| 0.000 | 0.000 | 1.588 | −0.030 | 0.182 | 1.914 | −0.038 | 0.233 | 2.606 |
| 0.000 | 0.000 | 3.175 | −0.032 | 0.194 | 4.196 | −0.050 | 0.157 | 3.585 |
| 0.000 | 0.000 | 6.350 | −0.082 | 0.250 | 6.144 | −0.096 | 0.217 | 5.758 |
| 0.000 | 0.000 | 12.700 | −0.104 | 0.537 | 13.669 | −0.101 | 0.479 | 12.856 |
| 0.000 | 0.000 | 25.400 | −0.091 | 1.012 | 26.749 | −0.105 | 0.941 | 25.587 |
| 0.000 | 0.000 | 50.800 | −0.178 | 1.933 | 51.845 | −0.149 | 1.935 | 51.647 |
| RMSE of Z Direction Static Target Measurements: | 0.092 () | 0.861 () | 0.849 () | 0.090 () | 0.844 () | 0.625 () | ||
| Direction of Target Displacements | Test Number | |||
|---|---|---|---|---|
| X | 1 | −0.004 | 203.200 | −0.493 |
| 2 | −0.004 | 203.200 | −0.492 | |
| 3 | −0.004 | 203.200 | −0.493 | |
| 4 | −0.004 | 203.200 | −0.493 | |
| 5 | −0.004 | 203.200 | −0.495 | |
| 6 | −0.004 | 203.200 | −0.497 | |
| 7 | −0.004 | 203.200 | −0.501 | |
| Y | 1 | −0.004 | 203.200 | −0.498 |
| 2 | −0.004 | 203.200 | −0.501 | |
| 3 | −0.004 | 203.200 | −0.509 | |
| 4 | −0.004 | 203.200 | −0.500 | |
| 5 | −0.004 | 203.200 | −0.499 | |
| 6 | −0.004 | 203.200 | −0.502 | |
| 7 | −0.004 | 203.200 | −0.504 | |
| Z | 1 | −0.004 | 203.200 | −0.491 |
| 2 | −0.004 | 203.200 | −0.501 | |
| 3 | −0.004 | 203.200 | −0.499 | |
| 4 | −0.004 | 203.200 | −0.504 | |
| 5 | −0.004 | 203.200 | −0.497 | |
| 6 | −0.004 | 203.200 | −0.501 | |
| 7 | −0.004 | 203.200 | −0.496 |
| Actual Static Target Displacements in X, Y and Z Directions | Static Target Displacement Measurements in X, Y and Z Directions | |||||||
|---|---|---|---|---|---|---|---|---|
| Using a Stationary Calibration Target | Using a Stationary Calibration Target with an Attached Tilt Sensor | |||||||
| X | Y | Z | X | Y | Z | X | Y | Z |
| 0.000 | 0.000 | 0.000 | 1.080 | −1.699 | 0.119 | −0.479 | −0.722 | 0.961 |
| 1.588 | 0.000 | 0.000 | 3.603 | −2.122 | −1.106 | 1.567 | −1.117 | 2.857 |
| 3.175 | 0.000 | 0.000 | 5.335 | −1.836 | −5.351 | 3.071 | −0.705 | 1.565 |
| 6.350 | 0.000 | 0.000 | 8.644 | −1.567 | −7.531 | 6.223 | −0.297 | 1.860 |
| 12.700 | 0.000 | 0.000 | 16.007 | −1.801 | −9.846 | 13.529 | −0.238 | 2.762 |
| 25.400 | 0.000 | 0.000 | 28.718 | −2.634 | −8.425 | 26.260 | −1.079 | 3.055 |
| 50.800 | 0.000 | 0.000 | 52.625 | −2.233 | −10.061 | 50.478 | −0.088 | 4.479 |
| RMSE of X direction static target measurements: | 2.403 () | 2.014 () | 7.129 () | 0.505 () | 0.715 () | 2.726 () | ||
| X | Y | Z | X | Y | Z | X | Y | Z |
| 0.000 | 0.000 | 0.000 | 0.800 | −1.376 | 7.145 | −0.650 | −0.551 | −0.205 |
| 0.000 | 1.588 | 0.000 | 0.014 | 1.159 | 8.397 | −1.203 | 1.973 | −0.906 |
| 0.000 | 3.175 | 0.000 | 0.034 | 3.214 | 7.902 | −0.991 | 4.133 | −1.670 |
| 0.000 | 6.350 | 0.000 | 0.592 | 6.752 | 8.507 | −0.995 | 7.271 | −1.464 |
| 0.000 | 12.700 | 0.000 | −0.270 | 12.276 | 7.621 | −1.248 | 13.300 | −1.944 |
| 0.000 | 25.400 | 0.000 | 0.297 | 25.588 | 6.175 | −1.069 | 26.253 | −3.710 |
| 0.000 | 50.800 | 0.000 | −3.449 | 47.445 | 79.469 | −1.872 | 50.712 | −5.650 |
| RMSE of Y direction static target measurements: | 1.365 () | 1.399 () | 30.863 () | 1.198 () | 0.688 () | 2.810 () | ||
| X | Y | Z | X | Y | Z | X | Y | Z |
| 0.000 | 0.000 | 0.000 | 1.186 | 13.767 | −32.499 | −0.493 | −0.561 | 1.866 |
| 0.000 | 0.000 | 1.588 | 3.476 | 13.146 | −36.111 | −0.051 | 0.073 | 6.874 |
| 0.000 | 0.000 | 3.175 | 3.578 | 13.274 | −35.506 | −0.016 | 0.329 | 8.474 |
| 0.000 | 0.000 | 6.350 | 0.013 | −1.480 | 13.960 | −0.259 | 0.744 | 11.423 |
| 0.000 | 0.000 | 12.700 | 0.386 | −0.532 | 21.522 | 0.429 | 1.845 | 18.657 |
| 0.000 | 0.000 | 25.400 | 1.671 | 0.013 | 32.823 | 1.523 | 3.438 | 29.354 |
| 0.000 | 0.000 | 50.800 | 1.359 | 2.609 | 57.991 | 2.406 | 7.088 | 53.406 |
| RMSE of Z direction static target measurements: | 2.107 () | 8.846 () | 24.542 () | 1.109 () | 3.081 () | 4.522 () | ||
| Test Number | Error (%) | |||||
|---|---|---|---|---|---|---|
| 1 | 4.900 | 236.538 | 0.018 | 3.048 | 2.849 | 6.54% |
| 2 | 9.800 | 236.538 | 0.037 | 6.350 | 5.857 | 7.77% |
| 3 | 4.900 | 295.275 | 0.028 | 5.588 | 5.425 | 2.92% |
| 4 | 9.800 | 295.275 | 0.058 | 11.938 | 11.444 | 4.14% |
| 5 | 4.900 | 358.775 | 0.039 | 9.906 | 9.401 | 5.10% |
| 6 | 9.800 | 358.775 | 0.082 | 20.574 | 19.695 | 4.27% |
| Please note that the error percentage is defined as . | ||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zeinali, Y.; Story, B.A.; Rajan, D. Measurement of Three-Dimensional Structural Displacement Using a Hybrid Inertial Vision-Based System. Sensors 2019, 19, 4083. https://doi.org/10.3390/s19194083
Zhang X, Zeinali Y, Story BA, Rajan D. Measurement of Three-Dimensional Structural Displacement Using a Hybrid Inertial Vision-Based System. Sensors. 2019; 19(19):4083. https://doi.org/10.3390/s19194083
Chicago/Turabian StyleZhang, Xinxiang, Yasha Zeinali, Brett A. Story, and Dinesh Rajan. 2019. "Measurement of Three-Dimensional Structural Displacement Using a Hybrid Inertial Vision-Based System" Sensors 19, no. 19: 4083. https://doi.org/10.3390/s19194083
APA StyleZhang, X., Zeinali, Y., Story, B. A., & Rajan, D. (2019). Measurement of Three-Dimensional Structural Displacement Using a Hybrid Inertial Vision-Based System. Sensors, 19(19), 4083. https://doi.org/10.3390/s19194083