A Machine Learning Approach to Bridge-Damage Detection Using Responses Measured on a Passing Vehicle



Abstract
1. Introduction
2. Damage Detection Algorithm
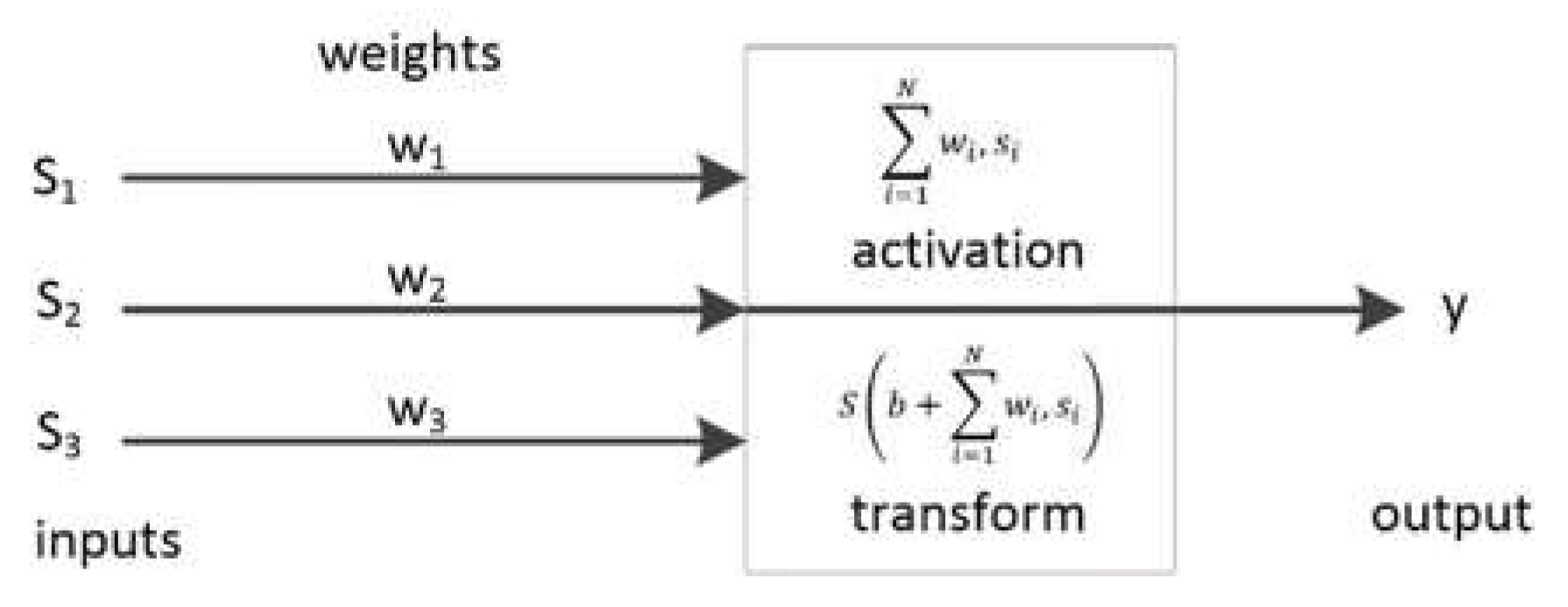
2.1. ANN Background
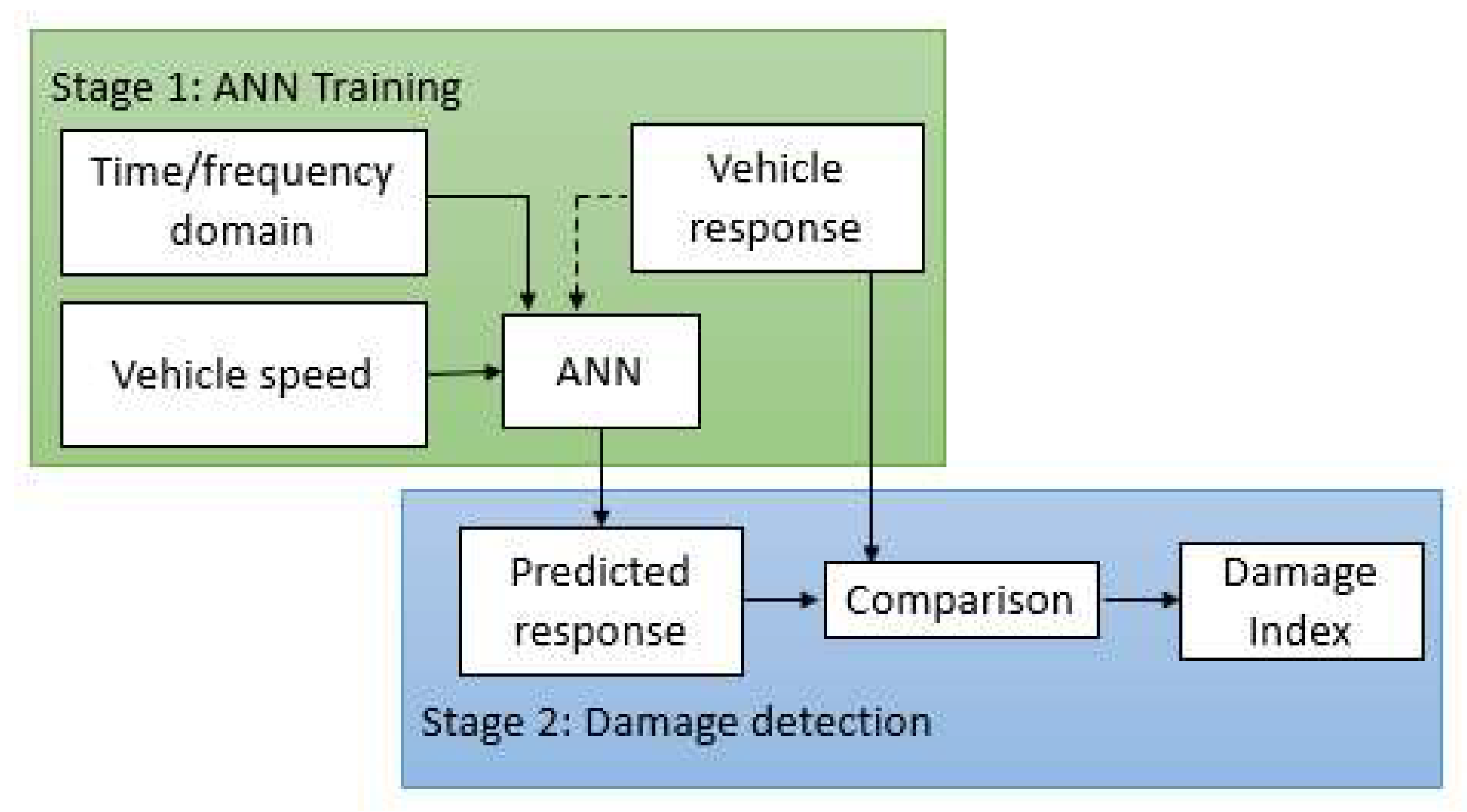
2.2. The Proposed ANN Model
2.2.1. Acceleration-Based Algorithm
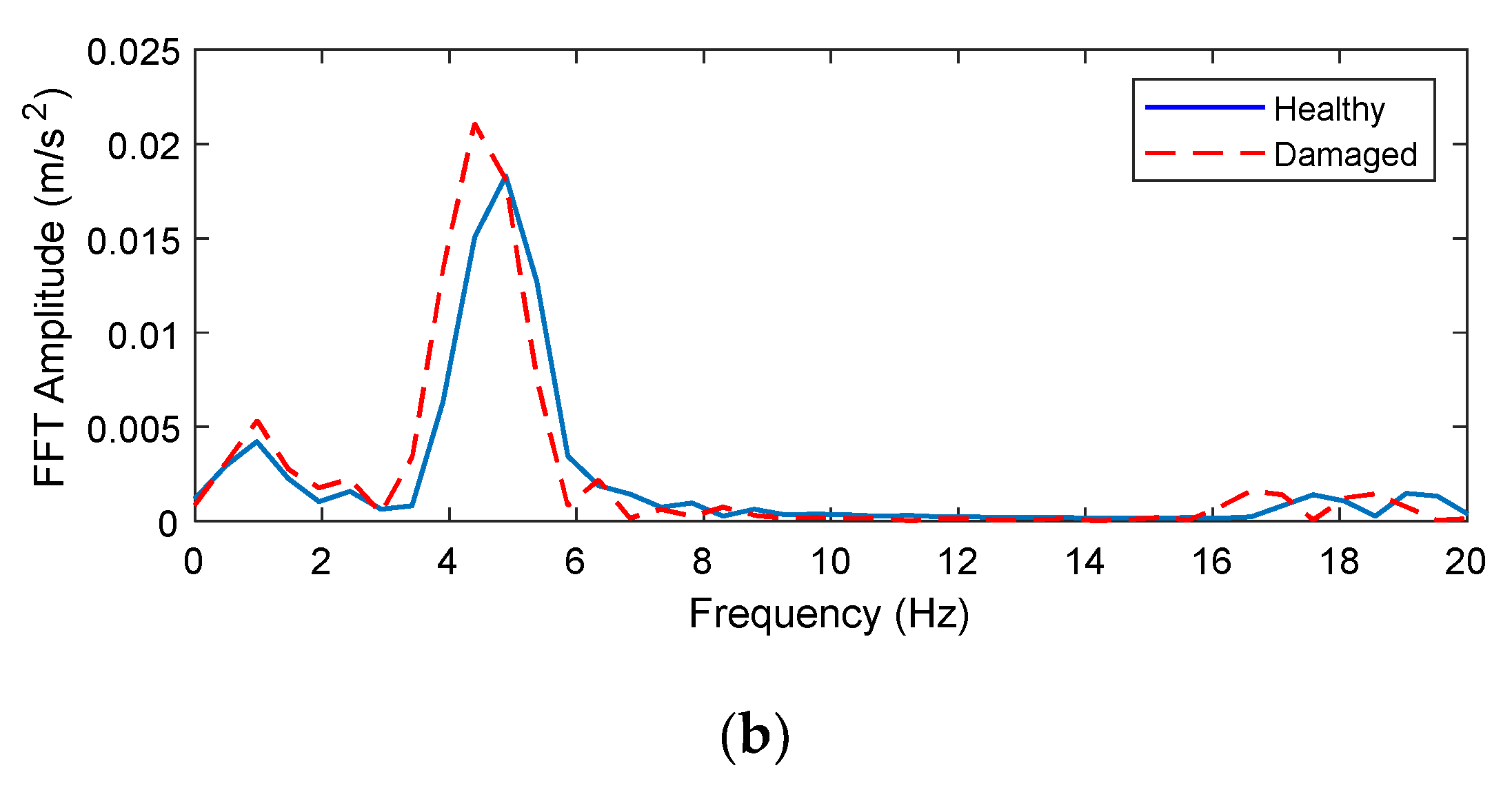
2.2.2. Spectrum-Based Algorithm
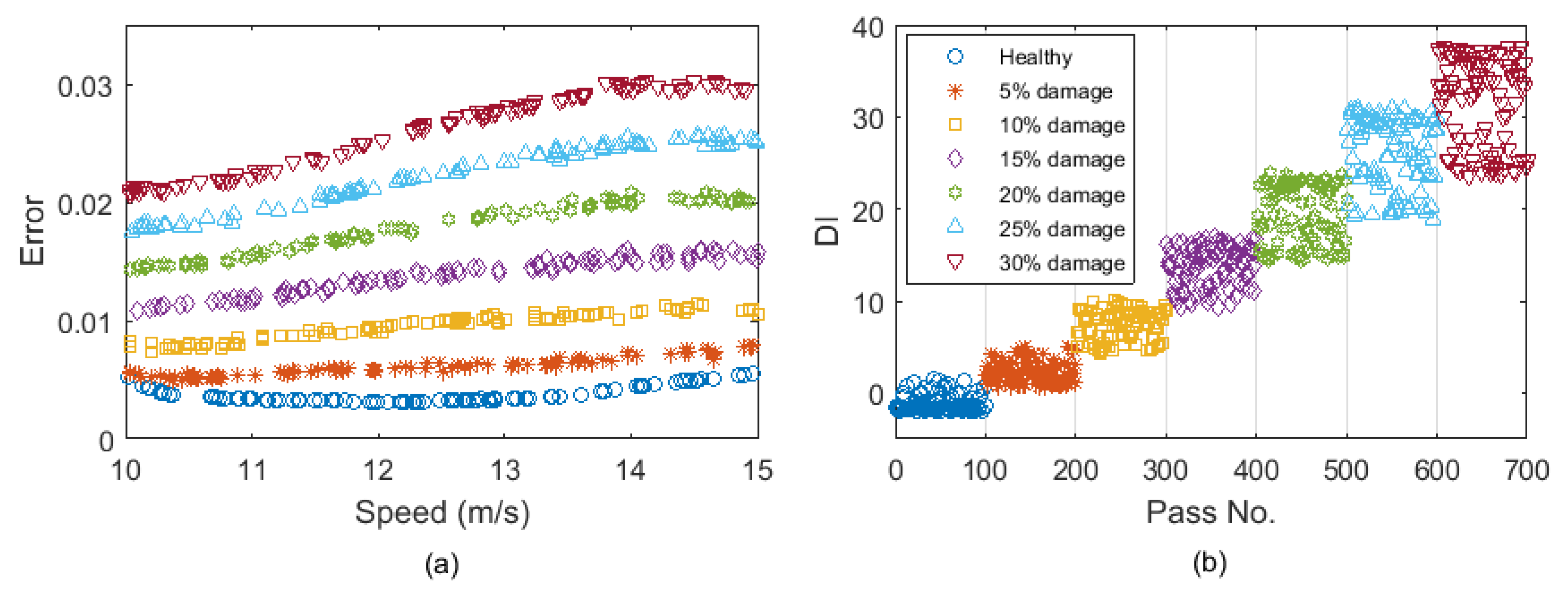
2.3. Damage Indicator
3. Numerical Modeling
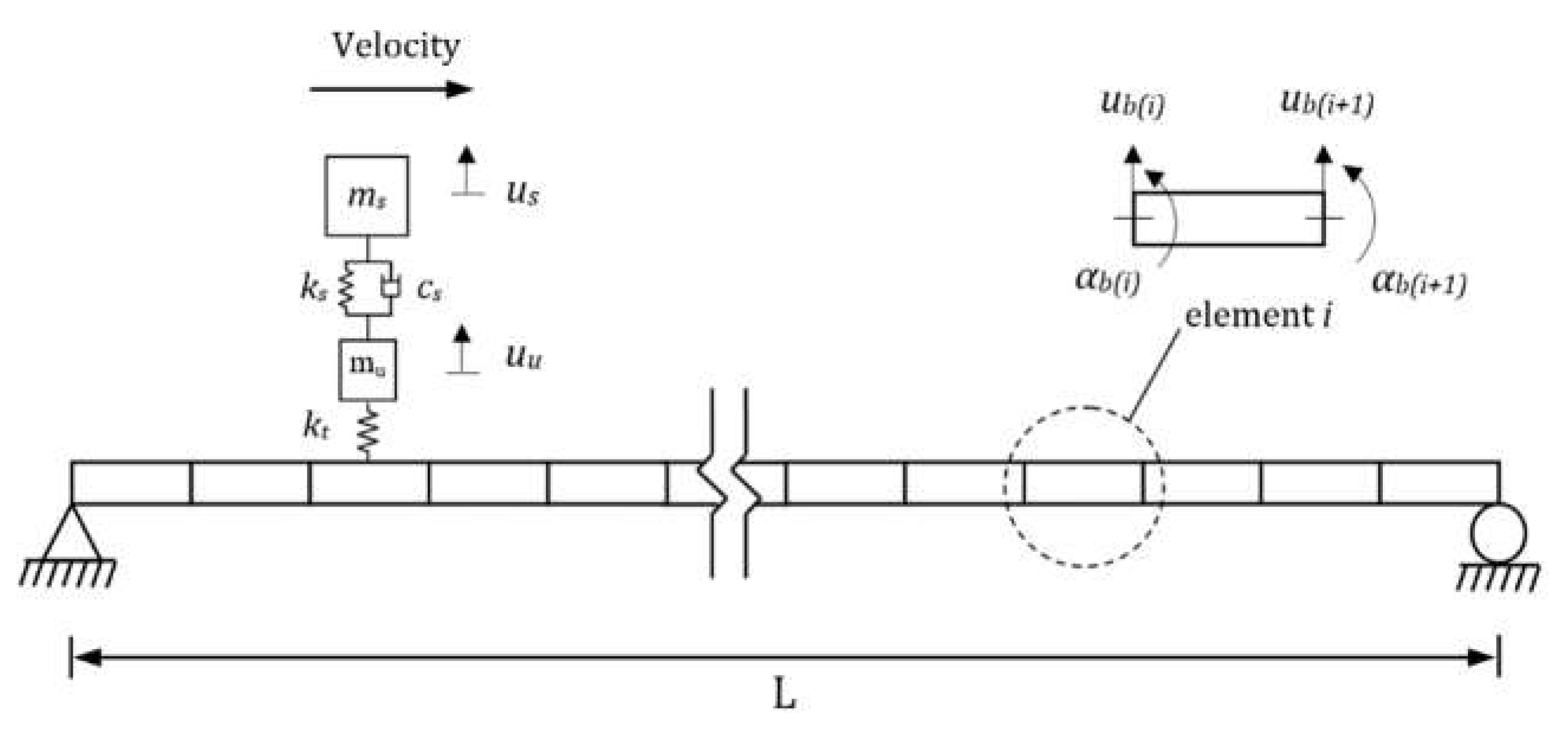
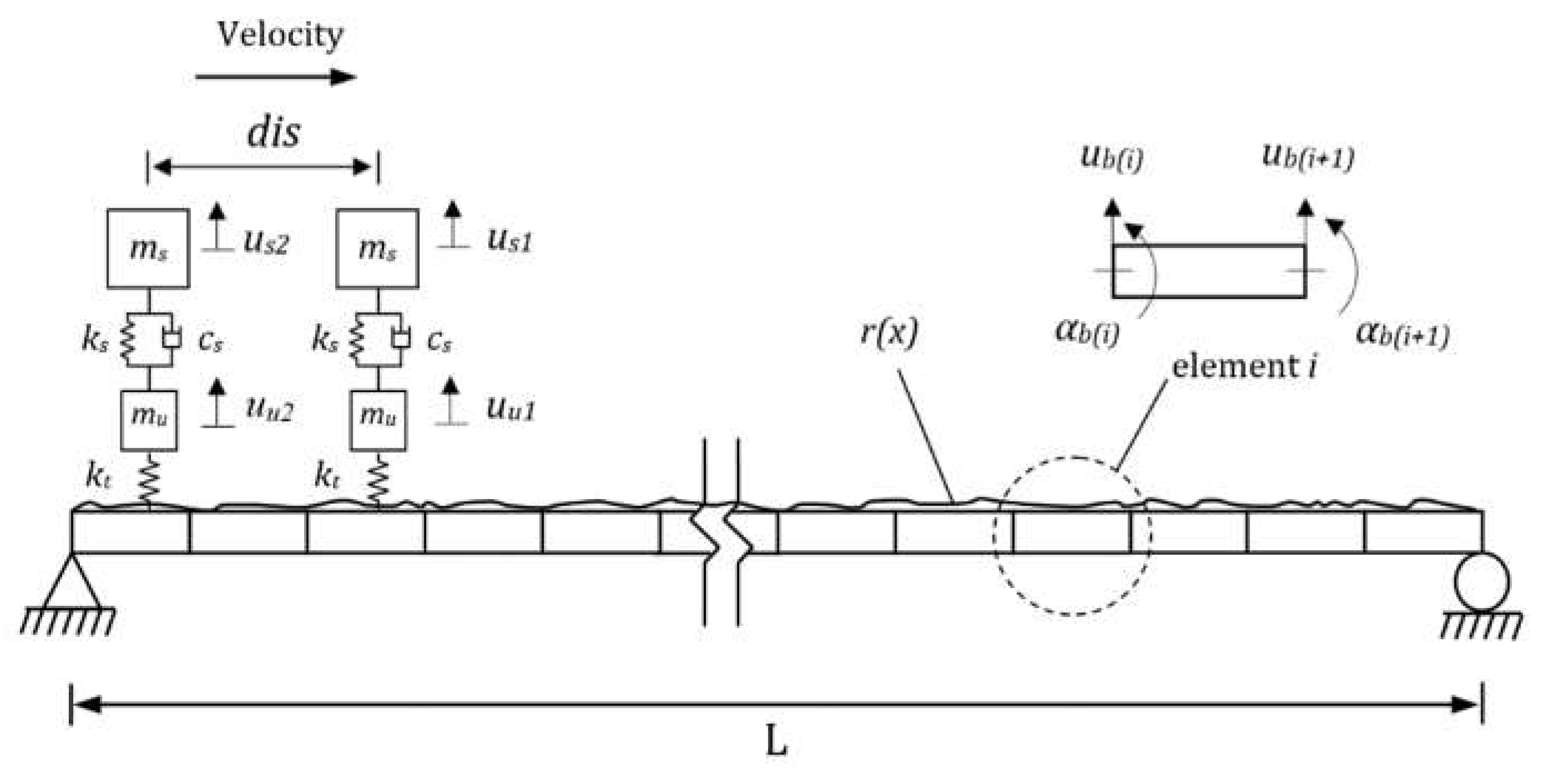
3.1. Finite Element Modeling of Vehicle–Bridge Interaction
3.2. Damage Modeling
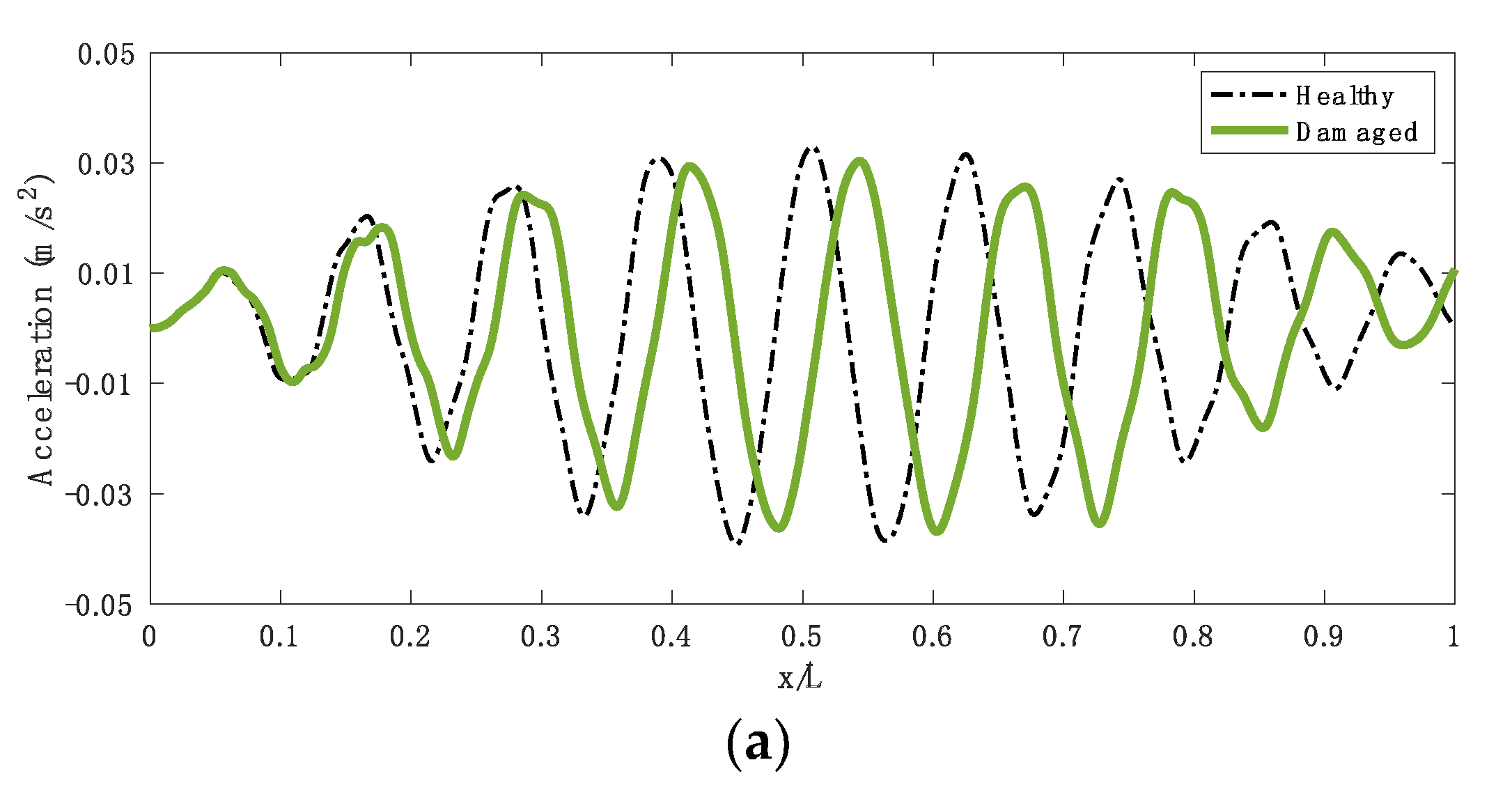
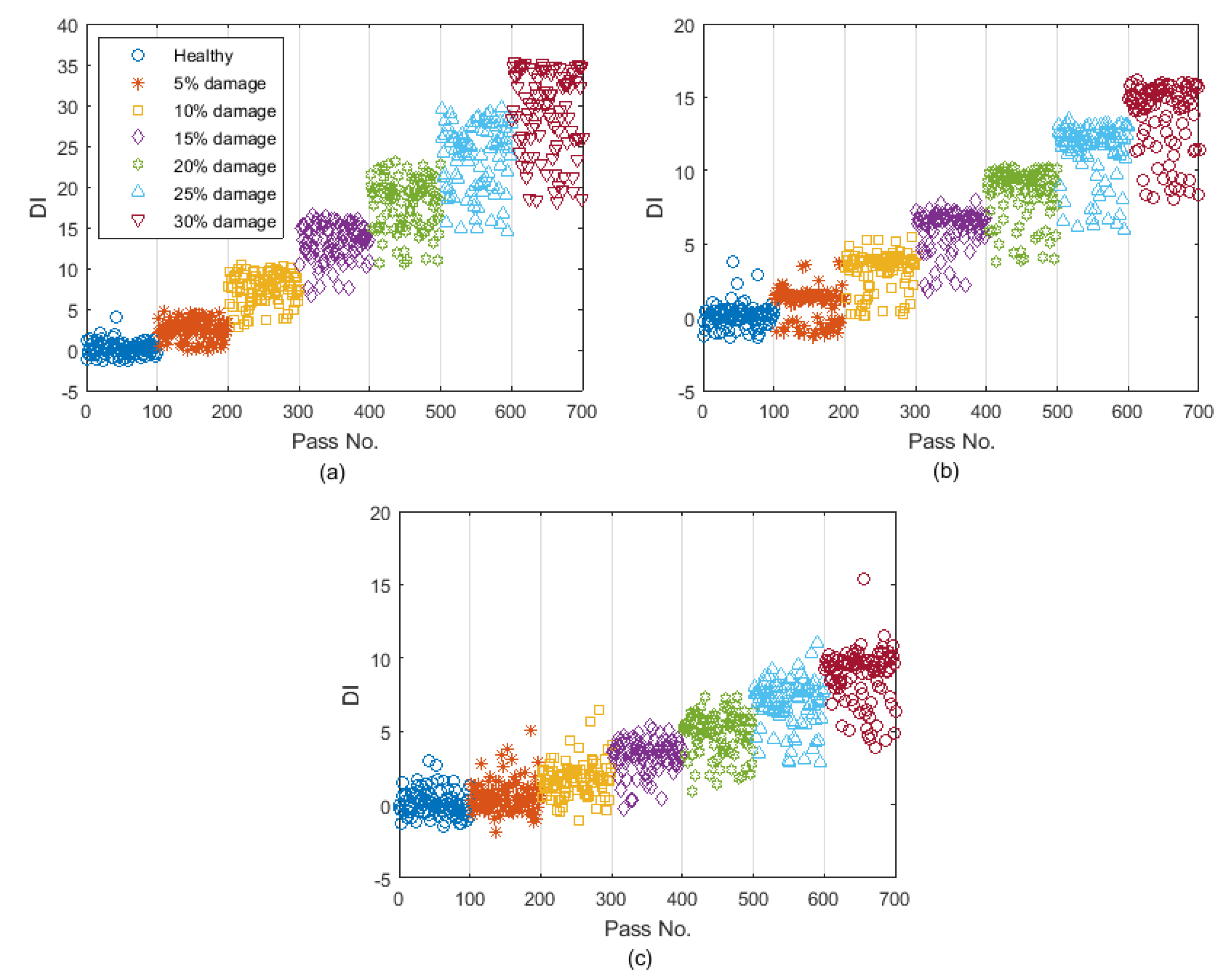
4. Numerical Results of the Acceleration-Based Algorithm
4.1. A Moving Quarter-Car Passing Over a Bridge with Smooth Road Profile
4.2. Two Moving Quarter-Cars Passing over a Bridge with Low Road Profile
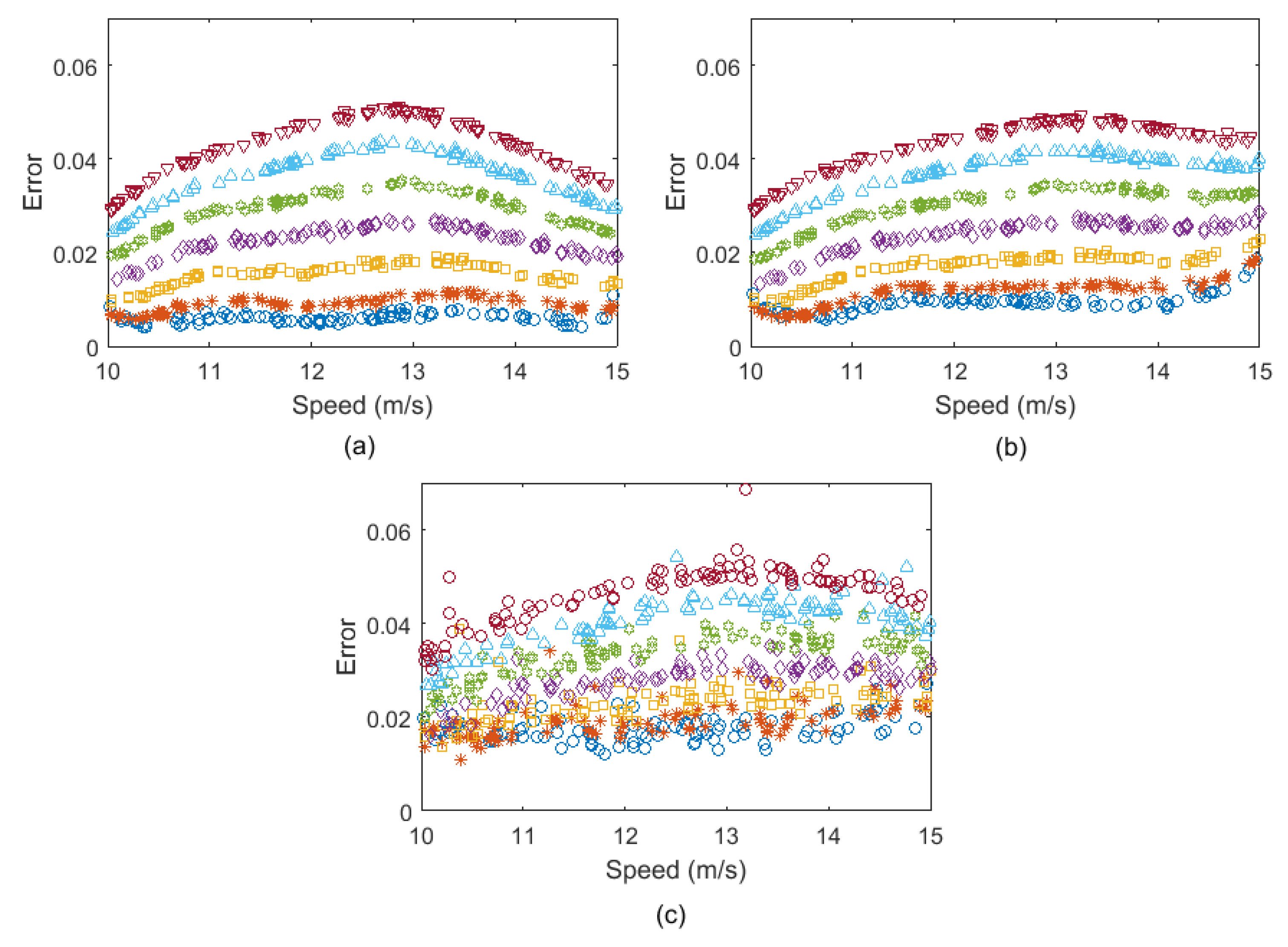
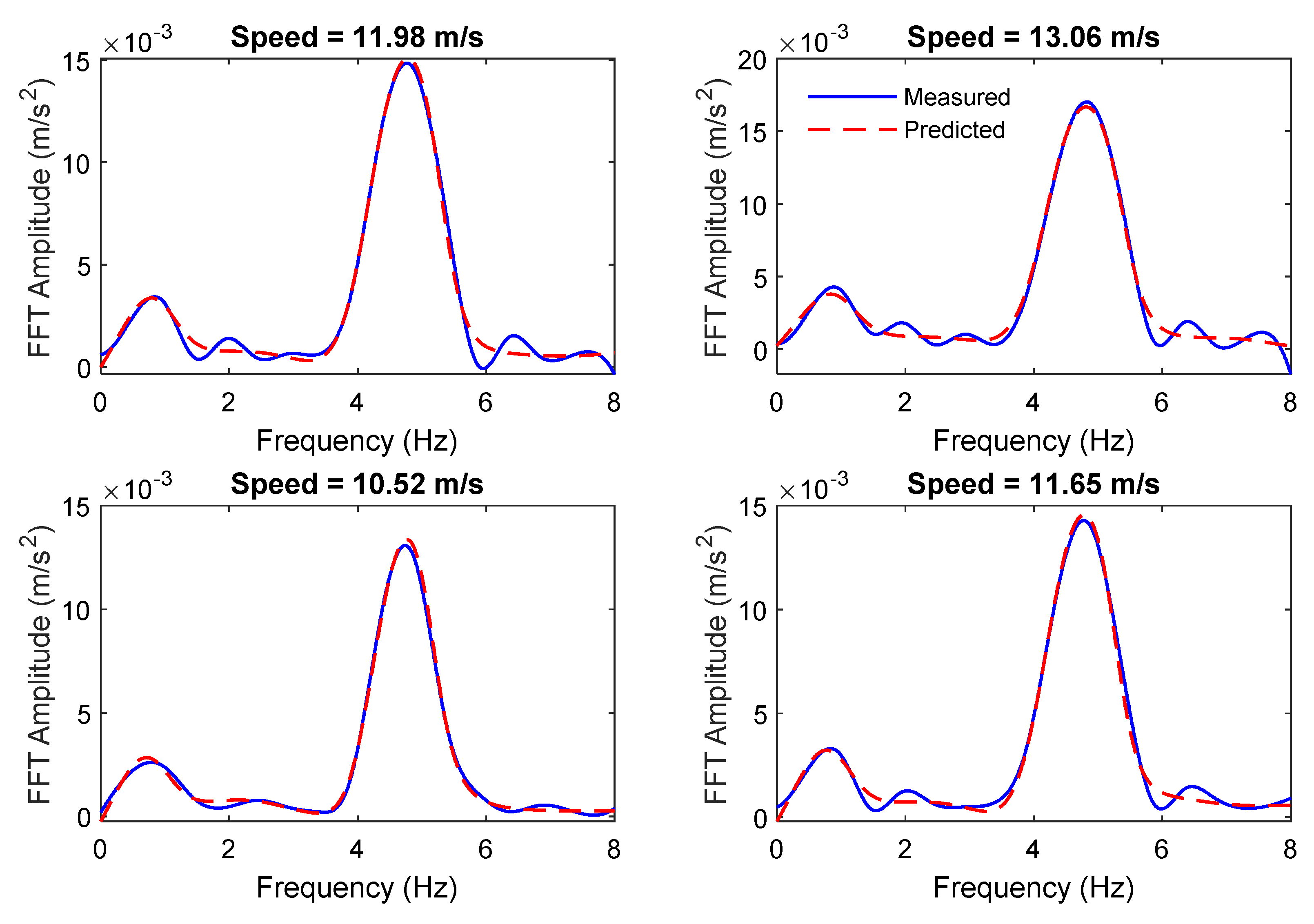
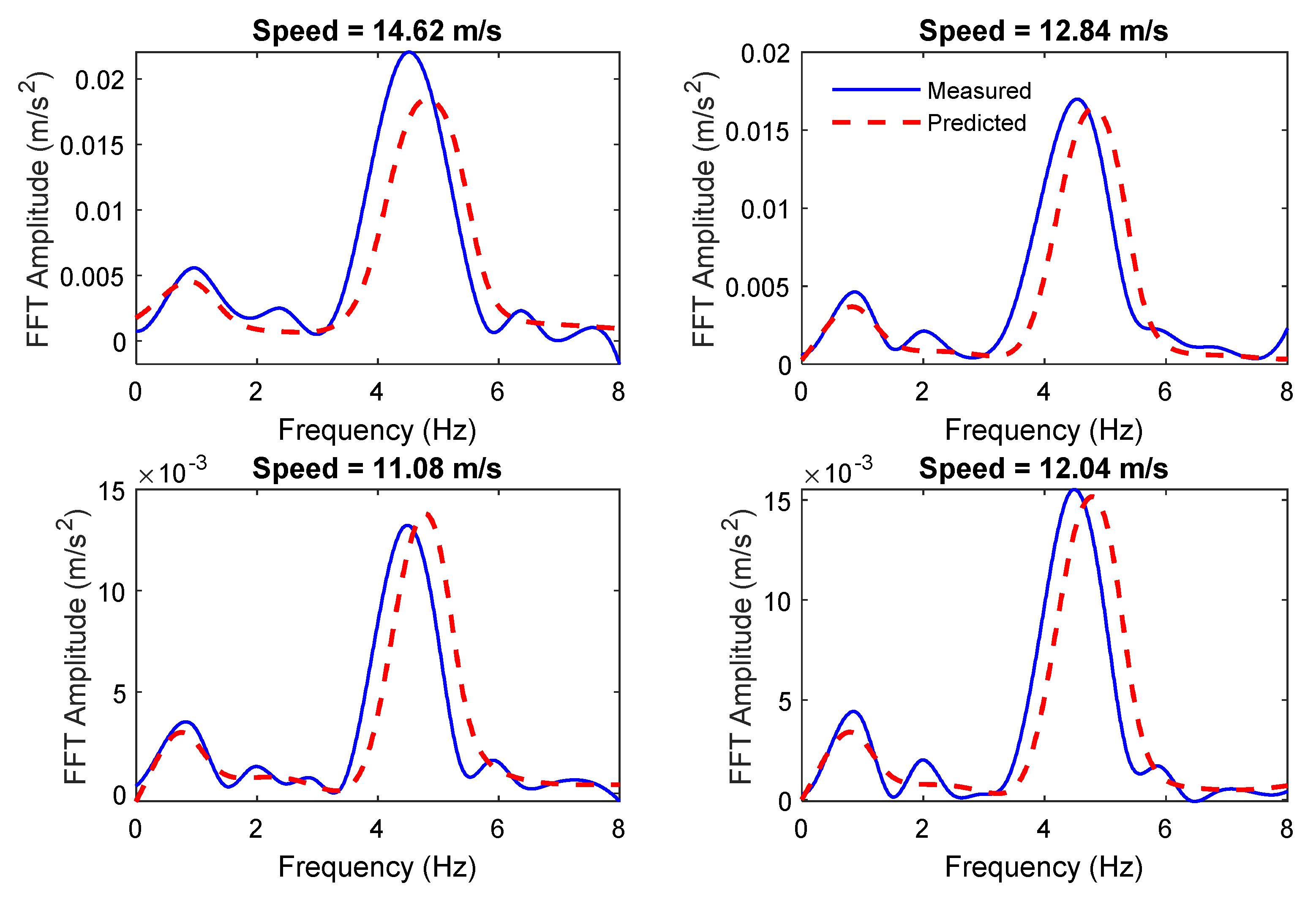
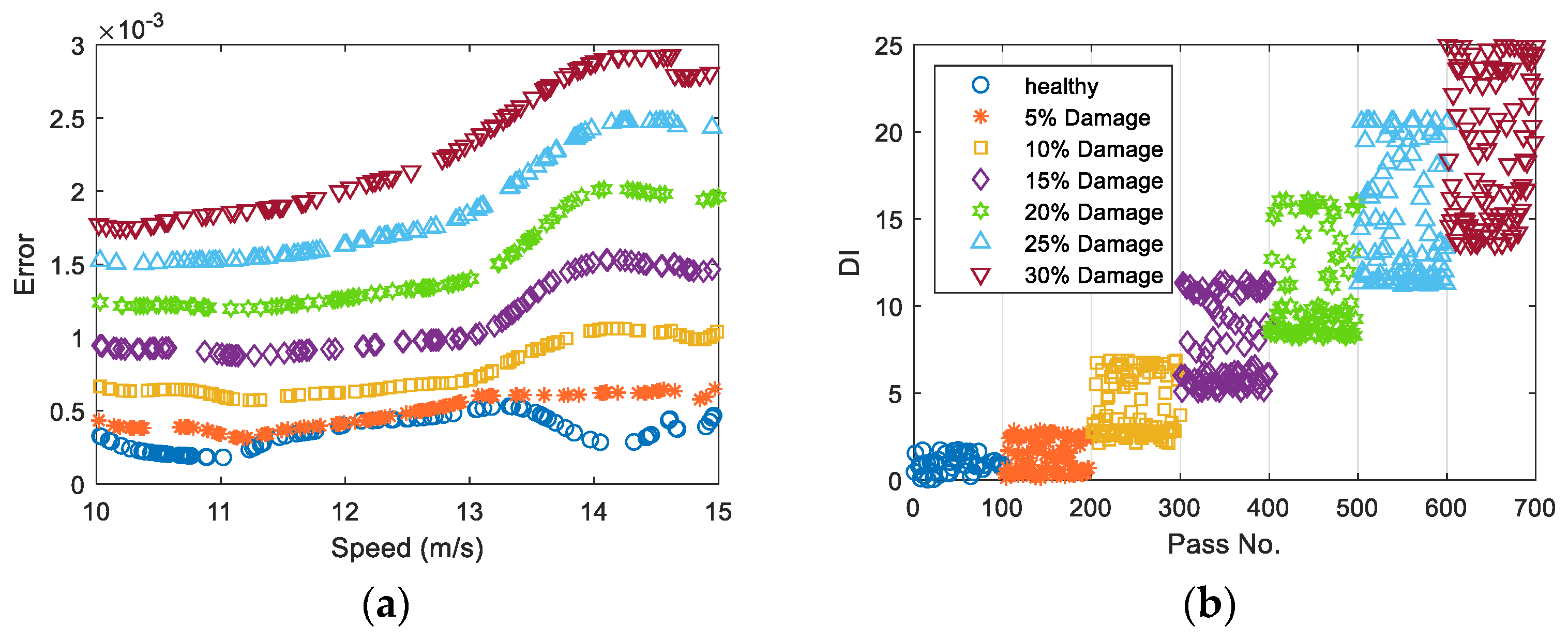
5. Numerical Results of the FFT-Based Algorithm
5.1. A Moving Quarter-Car Passing over a Bridge with a Smooth Road Profile
5.2. A Moving Quarter-Car Passing over a Bridge with a Low Road Profile
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Malekjafarian, A.; OBrien, E.J.; Golpayegani, F. Indirect monitoring of critical transport infrastructure: Data analysis and signal processing. In Data Anlytics Applications for Smart Cities; Alavi, A., Buttlar, W.G., Eds.; Auerbach/CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Malekjafarian, A.; McGetrick, P.J.; OBrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock Vib. 2015, 2015, 1–16. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Kim, C.W.; Kawatani, M. Challenge for a drive-by bridge inspection. In Proceedings of the 10th International Conference on Structural Safety and Reliability ICOSSAR2009, Osaka, Japan, 13–17 September 2009; pp. 758–765. [Google Scholar]
- Yang, Y.B.; Chang, K.C. Extracting the bridge frequencies indirectly from a passing vehicle: Parametric study. Eng. Struct. 2009, 31, 2448–2459. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, W.-F. Extraction of Bridge Frequencies from a Moving Test Vehicle by Stochastic Subspace Identification. J. Bridge Eng. 2015, 21, 04015053. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Brien, E.J. Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef]
- Yang, Y.B.; Li, Y.C.; Chang, K. Constructing the mode shapes of a bridge from a passing vehicles: A theoretical study. Smart Struct. Syst. 2014, 13, 797–819. [Google Scholar] [CrossRef]
- Malekjafarian, A.; OBrien, E.J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 2017, 397, 77–91. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]
- O’Brien, E.J.; Malekjafarian, A. A mode shape-based damage detection approach using laser measurement from a vehicle crossing a simply supported bridge. Struct. Control Health Monit. 2016, 23, 1273–1286. [Google Scholar] [CrossRef]
- OBrien, E.J.; McGetrick, P.; González, A. A drive-by inspection system via moving force identification. Smart Struct. Syst. 2014, 13, 821–848. [Google Scholar] [CrossRef]
- Li, Z.; Au, F. Damage detection of a continuous bridge from response of a moving vehicle. Shock Vib. 2014, 2014, 1–7. [Google Scholar] [CrossRef]
- Quirke, P.; Bowe, C.; OBrien, E.J.; Cantero, D.; Antolin, P.; Goicolea, J.M. Railway bridge damage detection using vehicle-based inertial measurements and apparent profile. Eng. Struct. 2017, 153, 421–442. [Google Scholar] [CrossRef]
- Zhu, X.Q.; Law, S.S.; Huang, L.; Zhu, S.Y. Damage identification of supporting structures with a moving sensory system. J. Sound Vib. 2018, 415, 111–127. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yang, J.P. State-of-the-Art Review on Modal Identification and Damage Detection of Bridges by Moving Test Vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Using two connected vehicles to measure the frequencies of bridges with rough surface: A theoretical study. Acta Mech. 2012, 223, 1851–1861. [Google Scholar] [CrossRef]
- Cerda, F.; Garrett, J.; Bielak, J.; Barrera, J.; Zhuang, Z.; Chen, S.; McCann, M.; Kovacevic, J.; Rizzo, P. Indirect structural health monitoring in bridges: Scale experiments. In Bridge Maintenance, Safety, Management, Resilience and Sustainability; CRC Press, Stresa/Taylor and Francis Group: London, UK, 2012; pp. 346–353. [Google Scholar]
- Miyamoto, A.; Yabe, A.; Bruhwiler, E. A Vehicle-based Health Monitoring System for Short and Medium Span Bridges and Damage Detection Sensitivity. Procedia Eng. 2017, 199, 1955–1963. [Google Scholar] [CrossRef]
- Neves, A.C.; Gonzalez, I.; Leander, J.; Karoumi, R. Structural health monitoring of bridges: A model-free ANN-based approach to damage detection. J. Civ. Struct. Health Monit. 2017, 7, 689–702. [Google Scholar] [CrossRef]
- Jin, C.H.; Jang, S.A.; Sun, X.R.; Li, J.C.; Christenson, R. Damage detection of a highway bridge under severe temperature changes using extended Kalman filter trained neural network. J. Civ. Struct. Health Monit. 2016, 6, 545–560. [Google Scholar] [CrossRef]
- Diez, A.; Khoa, N.L.D.; Alamdari, M.M.; Wang, Y.; Chen, F.; Runcie, P. A clustering approach for structural health monitoring on bridges. J. Civ. Struct. Health Monit. 2016, 6, 429–445. [Google Scholar] [CrossRef]
- Gonzalez, I.; Karoumi, R. BWIM aided damage detection in bridges using machine learning. J. Civ. Struct. Health Monit. 2015, 5, 715–725. [Google Scholar] [CrossRef]
- Braspenning, P.J.; Thuijsman, F. Artificial Neural Networks: An Introduction to ANN Theory and Practice, Vol 931; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- OBrien, E.J.; Malekjafarian, A.; Gonzalez, A. Application of empirical mode decomposition to drive-by bridge damage detection. Eur. J. Mech. A Solid 2017, 61, 151–163. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; OBrien, E. Drive-by bridge damage monitoring using Bridge Displacement Profile Difference. J. Civ. Struct. Health Monit. 2016, 6, 839–850. [Google Scholar] [CrossRef]
- Cantero, D.; Basu, B. Railway infrastructure damage detection using wavelet transformed acceleration response of traversing vehicle. Struct. Control Health Monit. 2015, 22, 62–70. [Google Scholar] [CrossRef]
- Cebon, D. Handbook of Vehicle-Road Interaction; Taylor & Francis: London, UK; New York, NY, USA, 1999. [Google Scholar]
- Clough, R.W.; Penzien, J. Dynamics of Structures; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- Tedesco, J.W.; McDougal, W.G.; Ross, C.A. Structural Dynamics: Theory and Applications; Addison Wesley Longman: Boston, MA, USA, 1999. [Google Scholar]
- Sinha, J.K.; Friswell, M.I.; Edwards, S. Simplified models for the location of cracks in beam structures using measured vibration data. J. Sound Vib. 2002, 251, 13–38. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chang, K. Effect of road surface roughness on the response of a moving vehicle for identification of bridge frequencies. Interact. Multiscale Mech. 2012, 5, 347–368. [Google Scholar] [CrossRef]
- Yang, J.P.; Lee, W.C. Damping Effect of a Passing Vehicle for Indirectly Measuring Bridge Frequencies by EMD Technique. Int. J. Struct. Stab. Dyn. 2018, 18, 1850008. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Symbol | Corresponding Value |
|---|---|---|
| Vehicle body mass (kg) | ms | 9300 |
| Vehicle axle mass (kg) | mu | 700 |
| Tyre stiffness (N/m) | kt | 1.75 × 106 |
| Suspension damping (Na/m) | cs | 104 |
| Suspension stiffness (N/m) | ks | 4 × 105 |
| Body bounce frequency (Hz) | ωb | 0.94 |
| Axle hop frequency (Hz) | ωa | 8.83 |
| Properties | Symbol | Value |
|---|---|---|
| Total length (m) | L | 15 |
| Depth (m) | d | 0.75 |
| Second moment of area (m4) | J | 0.5273 |
| Modulus of elasticity (N/mm2) | E | 35,000 |
| Mass per unit length (kg/m) | m | 28,125 |
| Bridge first natural frequency (Hz) | 5.65 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malekjafarian, A.; Golpayegani, F.; Moloney, C.; Clarke, S. A Machine Learning Approach to Bridge-Damage Detection Using Responses Measured on a Passing Vehicle. Sensors 2019, 19, 4035. https://doi.org/10.3390/s19184035
Malekjafarian A, Golpayegani F, Moloney C, Clarke S. A Machine Learning Approach to Bridge-Damage Detection Using Responses Measured on a Passing Vehicle. Sensors. 2019; 19(18):4035. https://doi.org/10.3390/s19184035
Chicago/Turabian StyleMalekjafarian, Abdollah, Fatemeh Golpayegani, Callum Moloney, and Siobhán Clarke. 2019. "A Machine Learning Approach to Bridge-Damage Detection Using Responses Measured on a Passing Vehicle" Sensors 19, no. 18: 4035. https://doi.org/10.3390/s19184035
APA StyleMalekjafarian, A., Golpayegani, F., Moloney, C., & Clarke, S. (2019). A Machine Learning Approach to Bridge-Damage Detection Using Responses Measured on a Passing Vehicle. Sensors, 19(18), 4035. https://doi.org/10.3390/s19184035