Avoiding Void Holes and Collisions with Reliable and Interference-Aware Routing in Underwater WSNs †



Abstract
1. Introduction
2. Related Work
2.1. Localization-Free Routing Protocols
2.2. Localization-Aware Routing Protocols
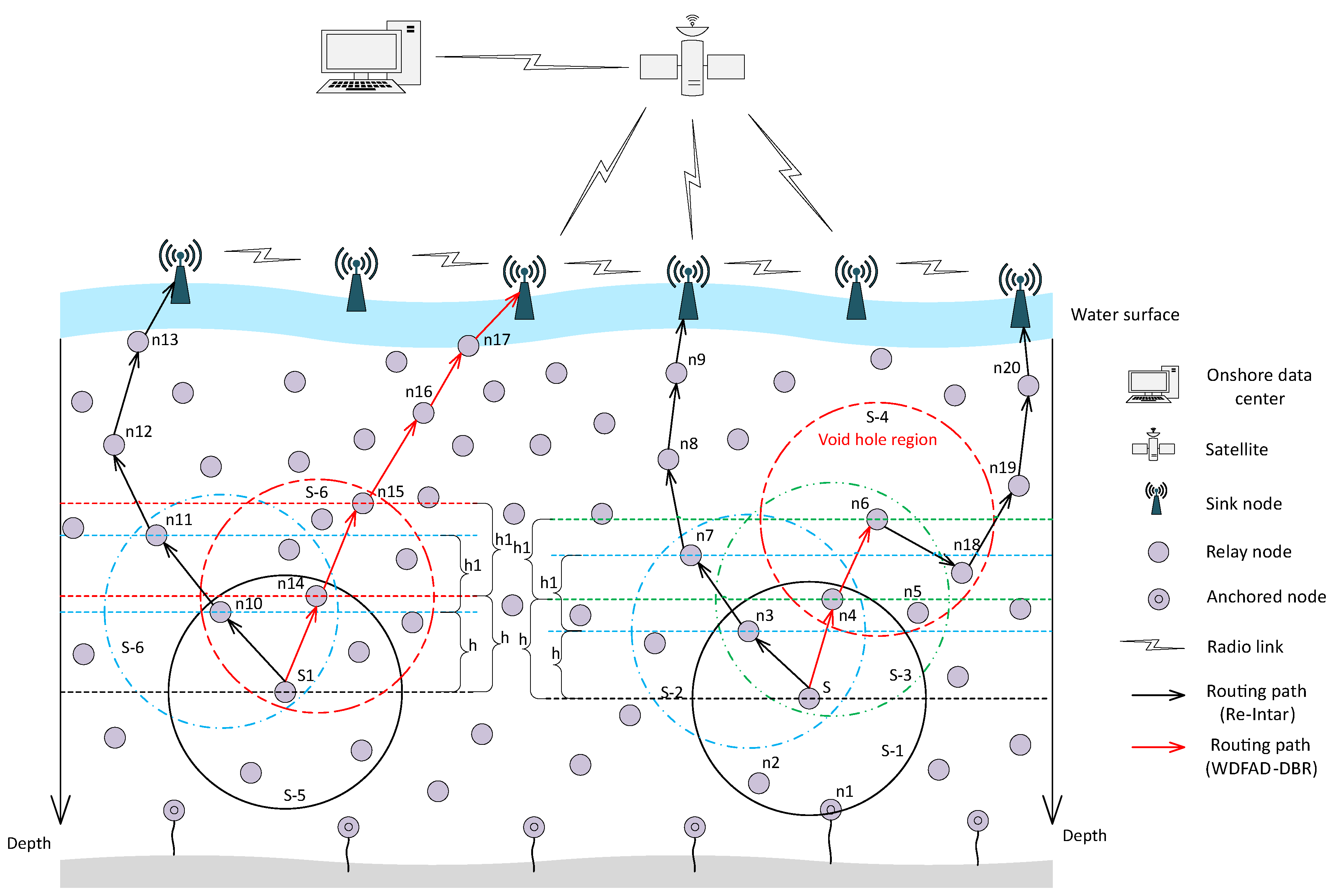
3. Proposed Schemes
3.1. Proposed Scheme 1: Intar
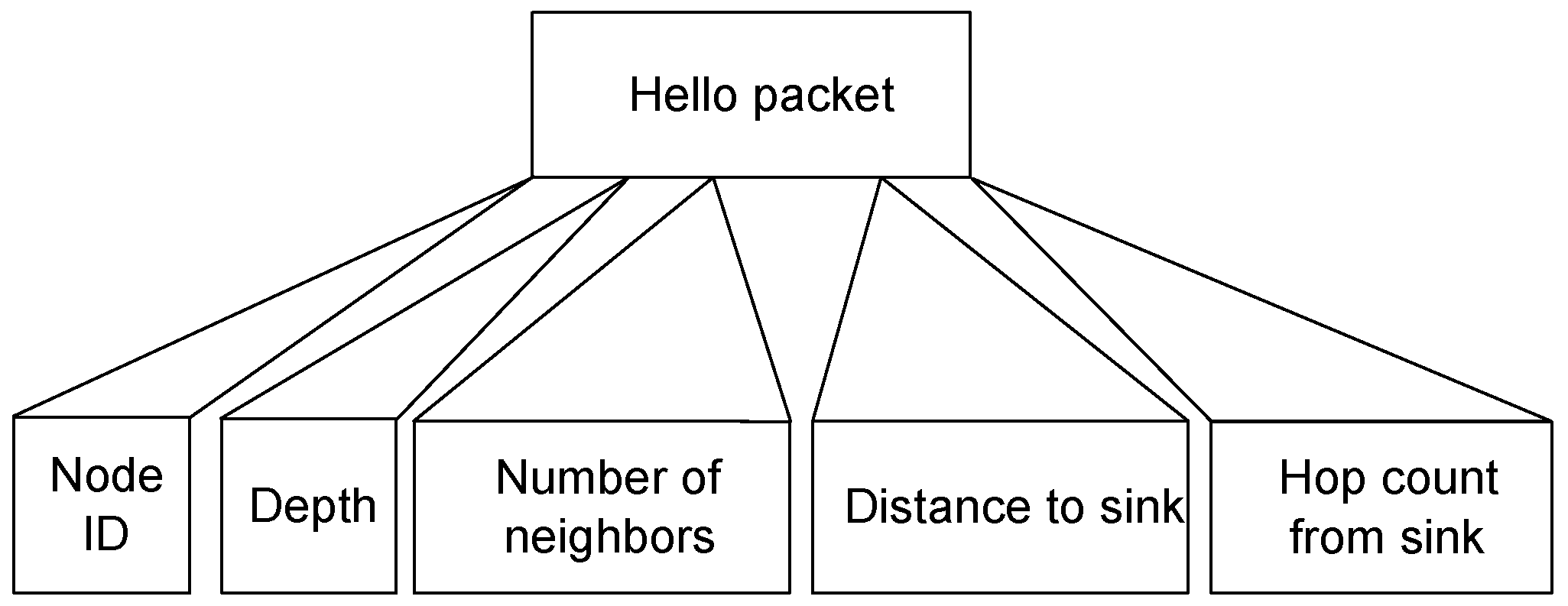
3.1.1. Network Setup Phase
3.1.2. Data Forwarding Phase
3.2. Proposed Scheme 2: Re-Intar
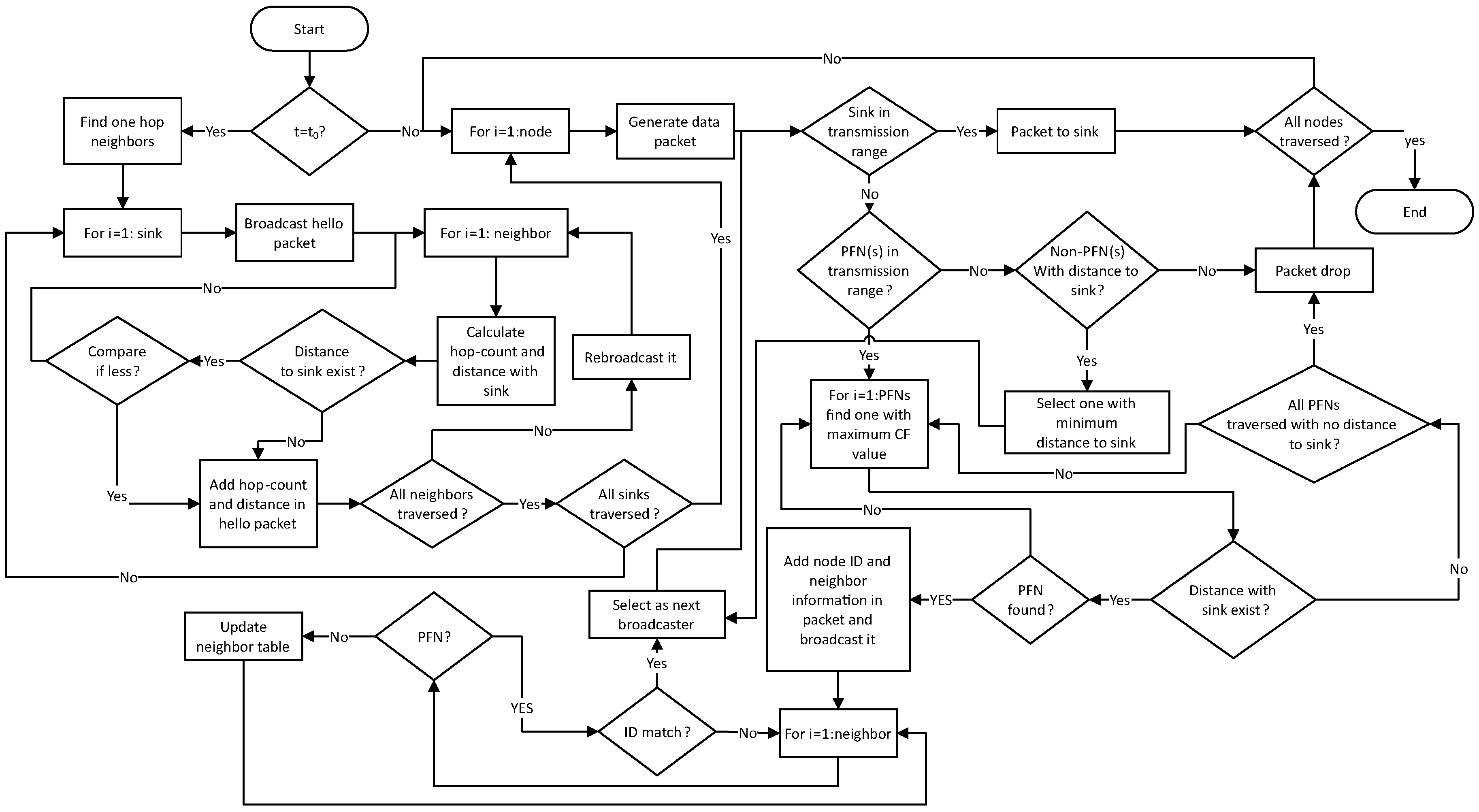
Data Forwarding Phase
| Algorithm 1 Data forwarding algorithm. |
|
4. Theoretical Analysis
4.1. Packet Delivery Probability Estimation
4.2. Packet Delivery Ratio Analysis
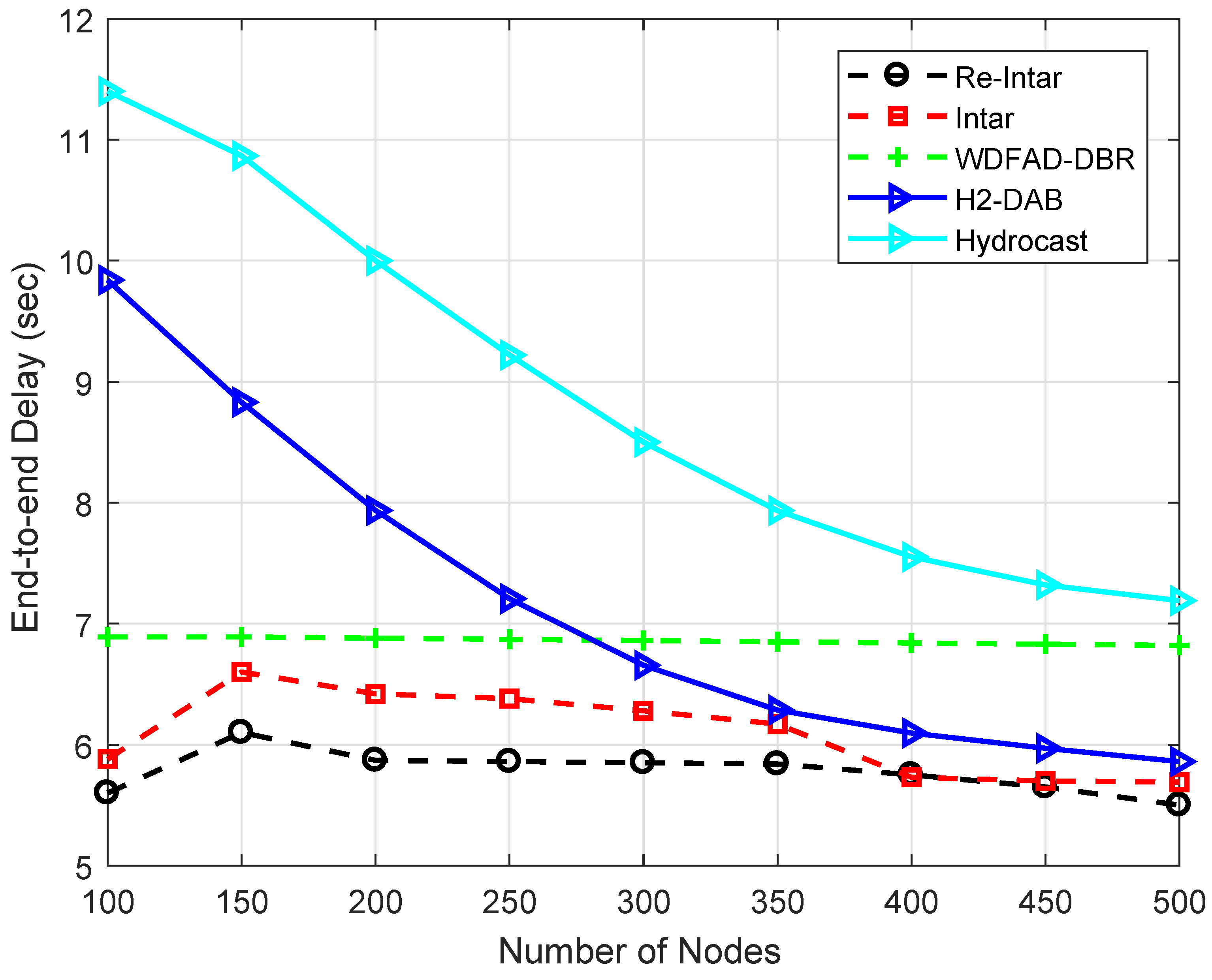
4.3. Average End-to-End Delay Analysis
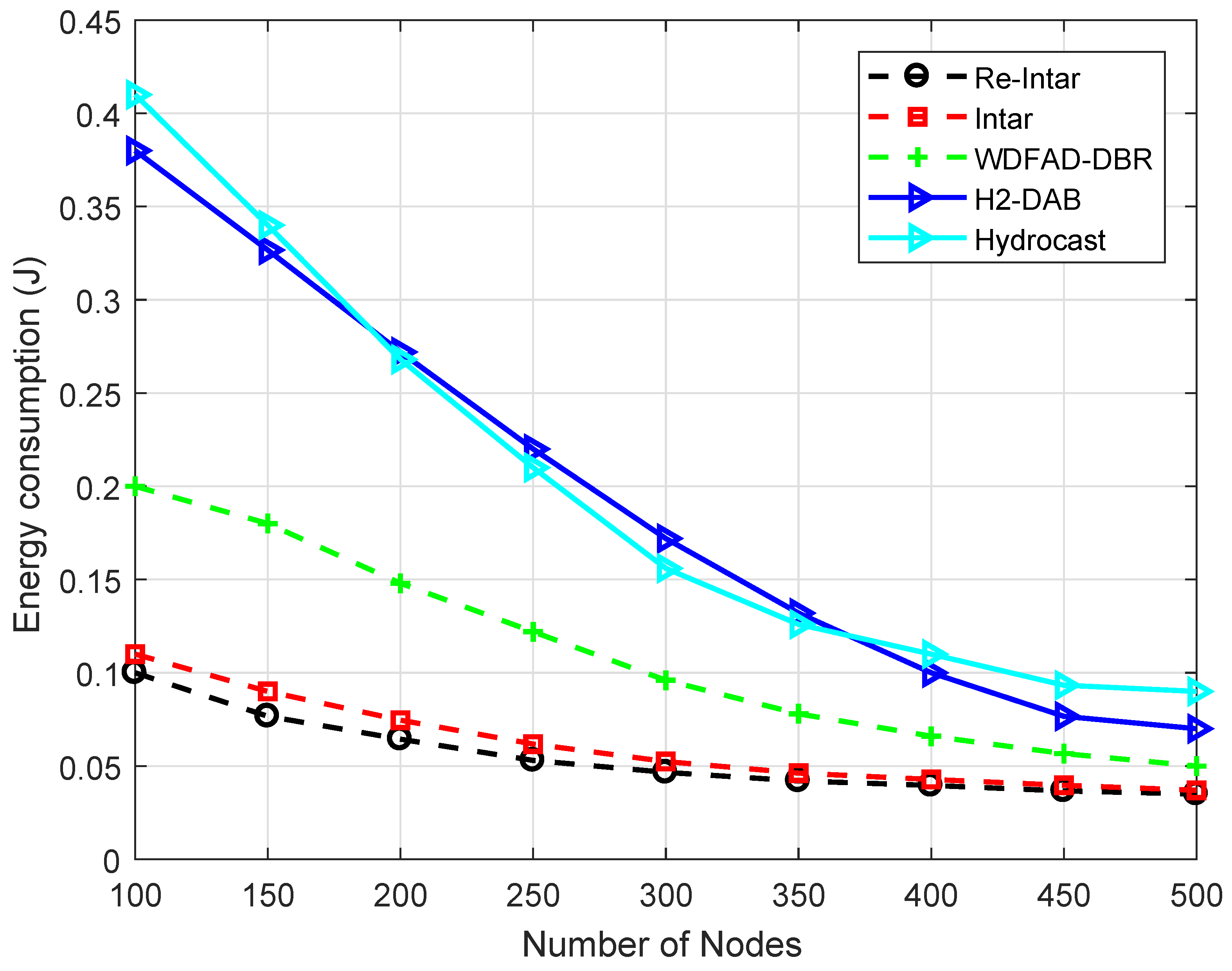
4.4. Average Energy Analysis
5. Performance Evaluation
Performance Trade-Offs
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. Underwater Wireless Sensor Networks: A New Challenge for Topology Control-Based Systems. ACM Comput. Surv. (CSUR) 2018, 51, 19. [Google Scholar] [CrossRef]
- Jiang, S.M. State-of-the-art medium access control (MAC) protocols for underwater acoustic networks: A survey based on a MAC reference model. IEEE Commun. Surv. Tutor. 2018, 20, 1. [Google Scholar] [CrossRef]
- Jiang, S. On reliable data transfer in underwater acoustic networks: A survey from networking perspective. IEEE Commun. Surv. Tutor. 2018, 20, 1036–1055. [Google Scholar] [CrossRef]
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. A survey of architectures and localization techniques for underwater acoustic sensor networks. IEEE Commun. Surv. Tutor. 2011, 13, 487–502. [Google Scholar] [CrossRef]
- Erol-Kantarci, M.; Mouftah, H.T.; Oktug, S. Localization techniques for underwater acoustic sensor networks. Commun. Mag. IEEE 2010, 48, 152–158. [Google Scholar] [CrossRef]
- Wu, H.; Mei, X.; Chen, X.; Li, J.; Wang, J.; Mohapatra, P. A novel cooperative localization algorithm using enhanced particle filter technique in maritime search and rescue wireless sensor network. ISA Trans. 2018, 78, 39–46. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.; Zheng, Y.R. Node localization with AoA assistance in multi-hop underwater sensor networks. Ad Hoc Netw. 2018, 78, 32–41. [Google Scholar] [CrossRef]
- Javaid, N.; Ahmad, Z.; Sher, A.; Wadud, Z.; Khan, Z.A.; Ahmed, S.H. Fair energy management with void hole avoidance in intelligent heterogeneous underwater WSNs. J. Ambient Intell. Humaniz. Comput. 2018, 1–17. [Google Scholar] [CrossRef]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In NETWORKING 2008 Ad Hoc and Sensor Networks, Wireless Networks, Next Generation Internet; Springer: Berlin/Heidelberg, Germany, 2008; pp. 72–86. [Google Scholar]
- Wahid, A.; Kim, D. An energy efficient localization-free routing protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2012, 2012. [Google Scholar] [CrossRef]
- Jafri, M.R.; Ahmed, S.; Javaid, N.; Ahmad, Z.; Qureshi, R.J. AMCTD: Adaptive mobility of courier nodes in threshold-optimized dbr protocol for underwater wireless sensor networks. In Proceedings of the 2013 Eighth International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA), Compiegne, France, 28–30 October 2013; pp. 93–99. [Google Scholar]
- Javaid, N.; Jafri, M.R.; Khan, Z.A.; Qasim, U.; Alghamdi, T.A.; Ali, M. iAMCTD: Improved adaptive mobility of courier nodes in threshold-optimized dbr protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2014, 2014. [Google Scholar] [CrossRef]
- Javaid, N.; Jafri, M.R.; Ahmed, S.; Jamil, M.; Khan, Z.A.; Qasim, U.; Al-Saleh, S.S. Delay-sensitive routing schemes for underwater acoustic sensor networks. Int. J. Distrib. Sens. Netw. 2015, 2015. [Google Scholar] [CrossRef]
- Yu, H.; Yao, N.; Wang, T.; Li, G.; Gao, Z.; Tan, G. WDFAD-DBR: Weighting depth and forwarding area division DBR routing protocol for UASNs. Ad Hoc Netw. 2016, 37, 256–282. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Lee, S.R.; Wang, P.; Vieira, L.; Cui, J.; Gerla, M.; Kim, K. HydroCast: Pressure routing for underwater sensor networks. IEEE Trans. Veh. Technol. 2015. [Google Scholar] [CrossRef]
- Ayaz, M.; Abdullah, A. Hop-by-hop dynamic addressing based (H2-DAB) routing protocol for underwater wireless sensor networks. In Proceedings of the 2009 International Conference on Information and Multimedia Technology, Jeju Island, Korea, 16–18 December 2009; pp. 436–441. [Google Scholar]
- Majid, A.; Azam, I.; Khan, T.; Sangeen; Khan, Z.A.; Qasim, U.; Javaid, N. A reliable and interference-aware routing protocol for underwater wireless sensor networks. In Proceedings of the 2016 IEEE 10th International Conference on Complex, Intelligent and Software Intensive Systems (CISIS), Fukuoka, Japan, 6–8 July 2016. [Google Scholar]
- Wahid, A.; Lee, S.; Kim, D. A reliable and energy-efficient routing protocol for underwater wireless sensor networks. Int. J. Commun. Syst. 2014, 27, 2048–2062. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. Channel-aware routing for underwater wireless networks. In Proceedings of the 2012 OCEANS, Yeosu, Korea, 21–24 May 2012; pp. 1–9. [Google Scholar]
- Zhou, Z.; Yao, B.; Xing, R.; Shu, L.; Bu, S. E-CARP: An energy efficient routing protocol for UWSNs in the internet of underwater things. IEEE Sens. J. 2016, 16, 4072–4082. [Google Scholar] [CrossRef]
- Wan, Z.; Liu, S.; Ni, W.; Xu, Z. An energy-efficient multi-level adaptive clustering routing algorithm for underwater wireless sensor networks. Cluster Comput. 2018, 1–10. [Google Scholar] [CrossRef]
- Gomathi, R.M.; Martin Leo Manickam, J. Energy Efficient Shortest Path Routing Protocol for Underwater Acoustic Wireless Sensor Network. Wirel. Pers. Commun. 2018, 98, 843–856. [Google Scholar] [CrossRef]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. Focused beam routing protocol for underwater acoustic networks. In Proceedings of the Third ACM International Workshop on Underwater Networks, San Francisco, CA, USA, 14–19 September 2008; pp. 75–82. [Google Scholar]
- Bu, R.; Wang, S.; Wang, H. Fuzzy logic vector based forwarding routing protocol for underwater acoustic sensor networks. Trans. Emerg. Telecommun. Technol. 2018, 29, e3252. [Google Scholar] [CrossRef]
- Hwang, D.; Kim, D. DFR: Directional flooding-based routing protocol for underwater sensor networks. In Proceedings of the 2008 OCEANS, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–7. [Google Scholar]
- Mridula, K.M.; Ameer, P.M. Localization under anchor node uncertainty for underwater acoustic sensor networks. Int. J. Commun. Syst. 2018, 31, e3445. [Google Scholar] [CrossRef]
- Xie, P.; Cui, J.H.; Lao, L. VBF: Vector-based forwarding protocol for underwater sensor networks. In Networking 2006. Networking Technologies, Services, and Protocols; Performance of Computer and Communication Networks; Mobile and Wireless Communications Systems; Springer: Berlin/Heidelberg, Germany, 2006; pp. 1216–1221. [Google Scholar]
- Nicolaou, N.; See, A.; Xie, P.; Cui, J.H.; Maggiorini, D. Improving the robustness of location-based routing for underwater sensor networks. In Proceedings of the OCEANS 2007-Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Yu, H.; Yao, N.; Liu, J. An adaptive routing protocol in underwater sparse acoustic sensor networks. Ad Hoc Netw. 2015, 34, 121–143. [Google Scholar] [CrossRef]
- Khosravi, M.R.; Basri, H.; Rostami, H. Efficient routing for dense UWSNs with high-speed mobile nodes using spherical divisions. J. Supercomput. 2018, 74, 696–716. [Google Scholar] [CrossRef]
- Khalid, M.; Cao, Y.; Ahmad, N.; Khalid, W.; Dhawankar, P. Radius-based multipath courier node routing protocol for acoustic communications. IET Wirel. Sens. Syst. 2018, 8, 183–189. [Google Scholar] [CrossRef]
- Etter, P.C. Underwater Acoustic Modeling and Simulation; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Yildiz, H.U.; Gungor, V.C.; Tavli, B. Packet Size Optimization for Lifetime Maximization in Underwater Acoustic Sensor Networks. IEEE Trans. Ind. Inform. 2018. [Google Scholar] [CrossRef]
- Shah, M.; Zahid, W.; Arshad, S.; Mahmood, A.; Zahoor, A.K.; Nadeem, J. Position adjustment-based location error-resilientgeo-opportunistic routing for void hole avoidance in underwater sensor networks. Concurr. Comput. Pract. Exp. 2018, e4772. [Google Scholar] [CrossRef]
- Guo, Z.; Colombo, G.; Wang, B.; Cui, J.H.; Maggiorini, D.; Rossi, G.P. Adaptive routing in underwater delay/disruption tolerant sensor networks. In Proceedings of the WONS 2008 Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 31–39. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol | Features | Flaws/Deficiency | Advantages Achieved |
|---|---|---|---|
| DBR [9] | Localization-free DBR protocol for underwater monitoring that handles dynamic networks. | Duplicate packets transmission, excessive energy consumptions and high end-to-end delay because of holding time. Due to greedy approach, void hole occurs. Inefficient for sparse and highly dense networks. | Improved network lifetime and data delivery ratio. |
| EEDBR [10] | Localization-free routing protocol for underwater monitoring and surveillance applications with controlled flooding. | High end-to-end delay due to holding time, no mechanism to avoid void hole and high energy consumption in dense networks. | Improved network lifetime, data delivery ratio and minimized energy consumption. |
| AMCTD [11] | Localization-free routing protocol with adaptive mobility of courier nodes. | High transmission loss due to distant transmissions of medium-depth nodes. Inefficient for data-sensitive applications due to mobility of courier nodes especially during instability period. | Prolonged network lifetime and reduced energy expenditure of low-depth sensor nodes specifically in stability period. Upholds the network throughput in the sparse condition with adaptive mobility of courier nodes. |
| iAMCTD [12] | Localization-free routing for time critical applications along with adaptive mobility of courier nodes. | Overhead in terms of control packets exchange and the problem of encounters void hole exist. | Prolonged network lifetime and reduced transmission loss. Minimized end-to-end delay and critical data loss in delay-sensitive applications. |
| Delay-sensitive schemes [13] | Delay-sensitive routing protocols as an improvement to localization-free routing schemes; DBR, EEDBR, and AMCTD. | Duplicate packets transmission in DSDBR, high energy consumption in dense networks in DSEEDBR and high transmission loss due to distant transmissions of medium-depth nodes in DSAMCTD. | Minimized total energy consumption, transmission loss and average end-to-end delay. |
| H2-DAB [16] | Localization-free beacon based routing scheme for critical underwater monitoring missions, route selection is based on hop-id. | Request and replay inquiry act as overhead and increased end-to-end delay as well as energy consumption of the network. | No need for full dimension location information. Achieved high data delivery ratio in both sparse and dense network. |
| R-ERPR [18] | Localization-free beacon based routing protocol, route selection is based on multiple metrics (physical distance, link quality and residual energy). | Consider multiple metrics for next forwarder selection which create computational overhead. Moreover, physical distance calculation creates hello packet overhead. | Prolonged network lifetime, improved packet delivery ratio, reduced end-to-end delay and energy expenditure for both grid and random topologies. |
| CARP [19] | Distributed cross-layered routing protocol for multi-hop data delivery. Relay is selected on the basis of having a history of successful packet delivery to sink. | Use PING-PONG control packets for appropriate relay selection which is not efficient in relatively steady network. High mobility of sensor nodes will lead to accelerated hop-count growth. | High throughput, less energy consumption and reduced end-to-end delay. |
| E-CARP [20] | Distributed cross-layered reactive routing protocol for relatively steady network topology. | Reduced throughput and show high path loss due to mobility of sensor nodes | Prolonged network lifetime and reduce energy consumption when sensory data size is very large compared to control packet. |
| HydroCast [15] | Pressure based routing protocol for enhancing reliability and resolving void hole problem. | In HydroCast, the detour path may be invalid because of water current which increased its communication overhead as well as energy consumption. | High packet delivery ratio with limited co-channel interference. |
| FBR [23] | Location-aware routing protocol for networks containing both static and mobile nodes. | High energy dissipation along with the delay because of RTS/CTS. | Reduced unnecessary flooding. |
| DFR [25] | Location-aware directional flooding based routing protocol with controlled flooding technique to increase reliability. | Due to constant transmission power, more energy is utilized because more energy is used from source to destination. In sparse networks, eligible forwarder cannot be found when void hole occur. | High reliability with less communication overhead. Improved packet delivery ratio and less end-to-end delay. |
| VBF [27] | A geographic VBF routing protocol with a position based routing approach. | The static communication range leads to higher packet drop and low performance of the network. Thus, VBF is effective in dense deployment. | Achieved robustness, energy efficiency, and high data delivery ratio. |
| HHVBF [28] | A geographic VBF routing protocol with adaptive hop-by-hop location-based approach. | HH-VBF illustrate good behavior in even distribution network, however, when nodes deployment is uneven, the performance is greatly effected. | Improved the robustness of packet delivery in sparse networks with less energy consumption. |
| AHH-VBF [29] | A geographic VBF scheme that changes the pipeline radius dynamically for adjusting the forwarding region. | In AHHVBF, increasing the radius of the pipeline does not resolve the void hole problem. | Reduced end-to-end delay, energy consumption and improved data delivery ratio. |
| NeighID | NumNeighbor | HopSink | DistNeighbor | Depth | Timestamp |
| Parameter | Value |
|---|---|
| Maximum transmission power | 50 W |
| Power threshold for receiving packets and idle state | 158 mW |
| Maximum transmission range | 2 km |
| Center frequency | 12 kHz |
| Bandwidth | 4 kHz |
| Data rate | 32 kbps |
| Acoustic propagation speed | 1.5 km/s |
| Deployment region | 10 km × 10 km × 10 km |
| Number of sinks | 9 |
| Number of sensor nodes | 100 to 500 |
| Movement model | Random walk 2D mobility model |
| Header size | 11 bytes |
| Payload | 72 bytes |
| ACK or neighbor request | 50 bits |
| Metric | Definition |
|---|---|
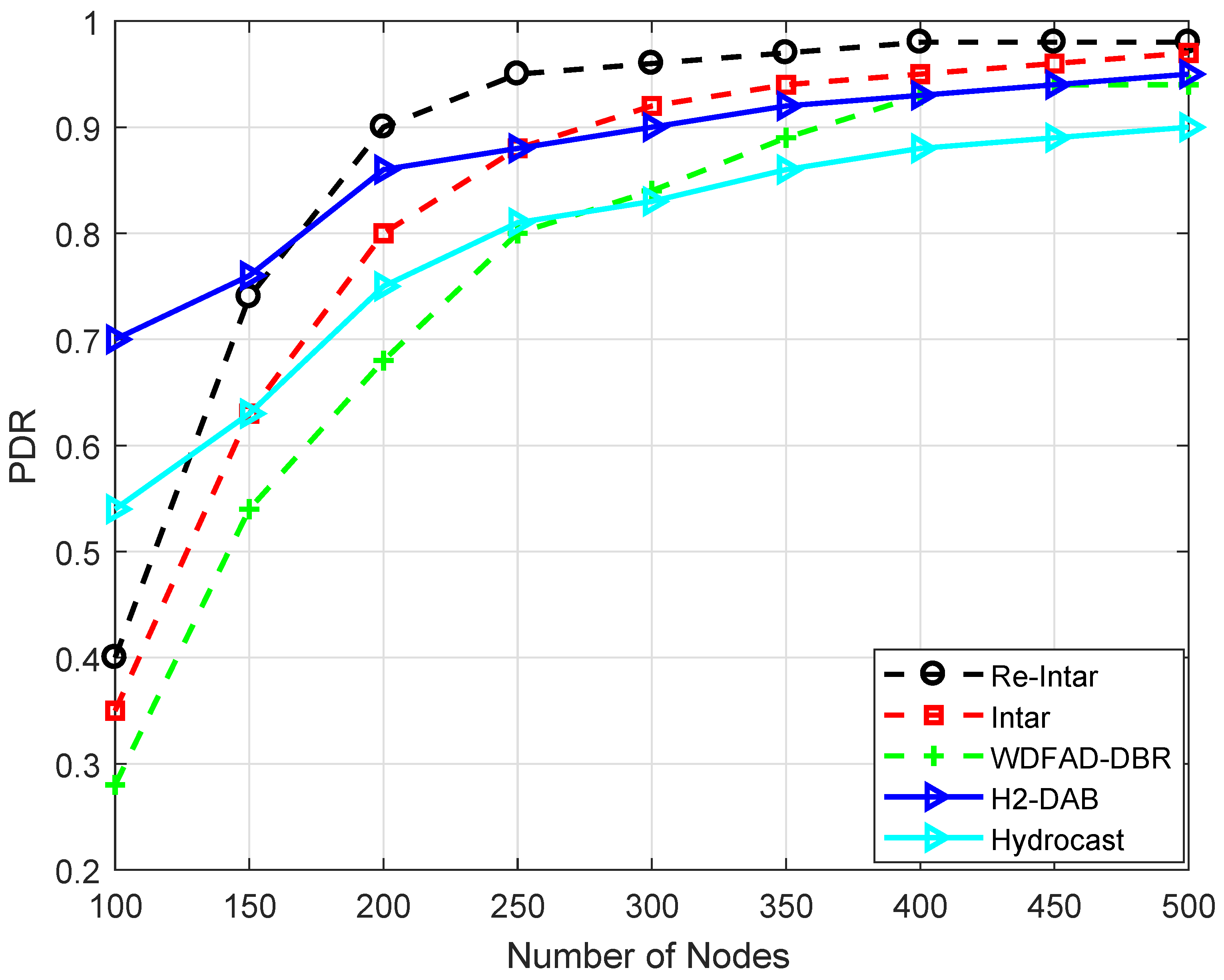
| Packet delivery ratio (PDR) | PDR defines the success ratio of a network. It is computed using the number of packets successfully received at the destination over the total number of data packets generated from the network nodes. |
| Energy tax | Energy tax is measured in terms of power required to deliver a data packet from a source to the destination node. The unit of energy tax is joule (J). |
| End-to-end delay | The delay is defined based on the total time period required by a packet to reach the destination from the source. It includes propagation, transmission, holding time, receiving and processing delays. The unit of second is used to measure the delay. |
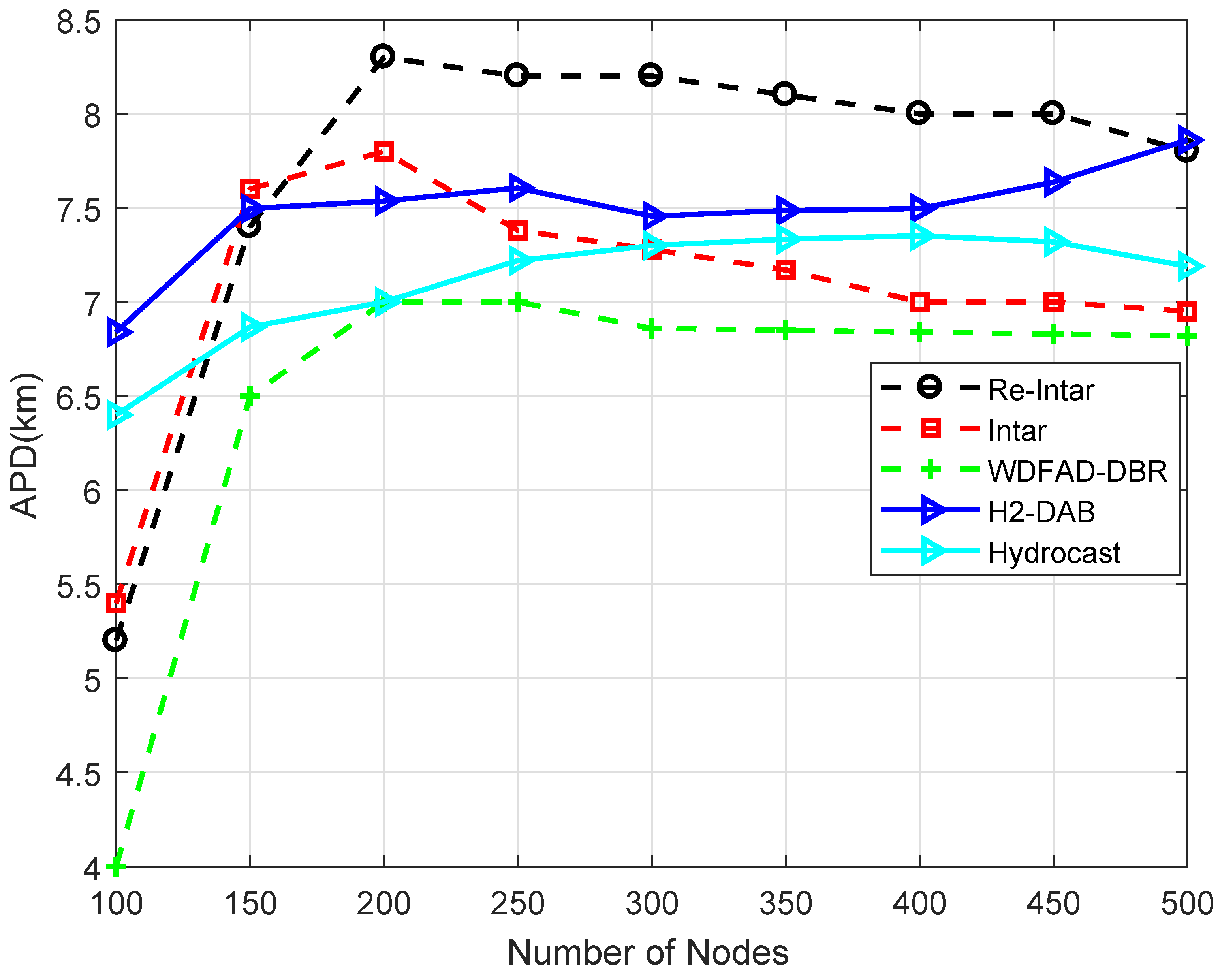
| Accumulative propagation distance (APD) | APD is the total distance required by a data packet to reach the destination successfully. It is measured in km. |
| Parameters | Number of Nodes | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | ||
| WDFAD-DBR | PDR | 40.00% | 31.08% | 27.65% | 18.05% | 13.35% | 9.46% | 5.65% | 4.06% | 3.37% |
| Energy tax | 66.62% | 34.44% | 15.23% | 9.66% | 4.71% | 2.42% | −0.057% | −1.45% | −1.63% | |
| End-to-end delay | 38.20% | 37.22% | 37.85% | 40.54% | 37.82% | 36.74% | 36.78% | 35.24% | 34.13% | |
| APD | −22.27% | −14.48% | −11.09% | −6.46% | −5.64% | −4.85% | −3.43% | −3.38% | −3.87% | |
| Intar | PDR | 17.07% | 15.67% | 10.80% | 7.16% | 5.31% | 3.84% | 2.54% | 1.71% | 1.26% |
| Energy tax | −2.81% | 1.98% | 5.44% | 7.87% | 9.36% | 10.38% | 11.98% | 12.09% | 12.55% | |
| End-to-end delay | −3.30% | 3.23% | 7.40% | 10.30% | 12.34% | 13.79% | 15.80% | 15.98% | 16.38% | |
| APD | −2.32% | 2.46% | 6.23% | 8.88% | 11.00% | 12.12% | 13.30% | 13.90% | 13.89% | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javaid, N.; Majid, A.; Sher, A.; Khan, W.Z.; Aalsalem, M.Y. Avoiding Void Holes and Collisions with Reliable and Interference-Aware Routing in Underwater WSNs. Sensors 2018, 18, 3038. https://doi.org/10.3390/s18093038
Javaid N, Majid A, Sher A, Khan WZ, Aalsalem MY. Avoiding Void Holes and Collisions with Reliable and Interference-Aware Routing in Underwater WSNs. Sensors. 2018; 18(9):3038. https://doi.org/10.3390/s18093038
Chicago/Turabian StyleJavaid, Nadeem, Abdul Majid, Arshad Sher, Wazir Zada Khan, and Mohammed Y. Aalsalem. 2018. "Avoiding Void Holes and Collisions with Reliable and Interference-Aware Routing in Underwater WSNs" Sensors 18, no. 9: 3038. https://doi.org/10.3390/s18093038
APA StyleJavaid, N., Majid, A., Sher, A., Khan, W. Z., & Aalsalem, M. Y. (2018). Avoiding Void Holes and Collisions with Reliable and Interference-Aware Routing in Underwater WSNs. Sensors, 18(9), 3038. https://doi.org/10.3390/s18093038