Integrity and Collaboration in Dynamic Sensor Networks


 , , ,
, , ,
Abstract
1. Introduction
2. Designing and Evaluating Dedicated Test Campaigns (Mapathons)
2.1. Setups
Calibration and Time Synchronization
2.2. Description of the Scenarios
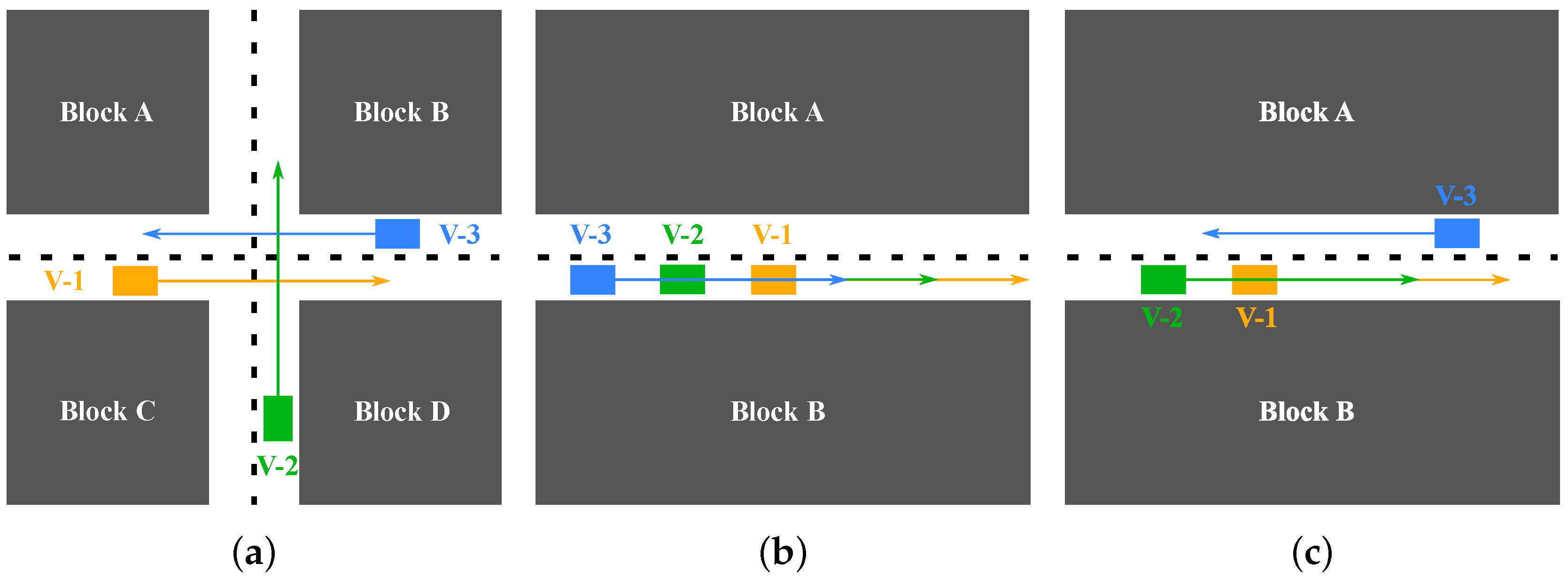
- (a)
- Meet & Greet scenario in an urban area. In this scenario, the three vehicles navigate in an urban area, meeting each other at an intersection. In addition, a group of about 20 pedestrians takes part in the scenario, in order to provide data for the pedestrian detection and tracking research project (Figure 5a and Figure 6).
- (b)
- Following scenario in an urban area. In this scenario, the three vehicles follow each other, starting in a relatively open area with low velocities, then, later on, speeding up on streets partially covered by vegetation (Figure 5b).
- (c)
- Meet & Greet scenario in an area covered by vegetation. Here, Vehicles 1 and 2 follow each other in a residential area with low height buildings. The main constraint for the satellite visibility is the urban vegetation. Pedestrians are again part of the scenario and are observed for subsequent detection and tracking (Figure 5c).
- (d)
- Mixed scenario. In this scenario, a combination of predefined trajectories with traffic rules of the area results in a scenario in which the three cars intermittently approach an intersection, combining Scenarios (a) and (c) above.
2.3. Experimental Results, Post-Processing and Storage
3. Exemplary Results on Integrity and Collaboration
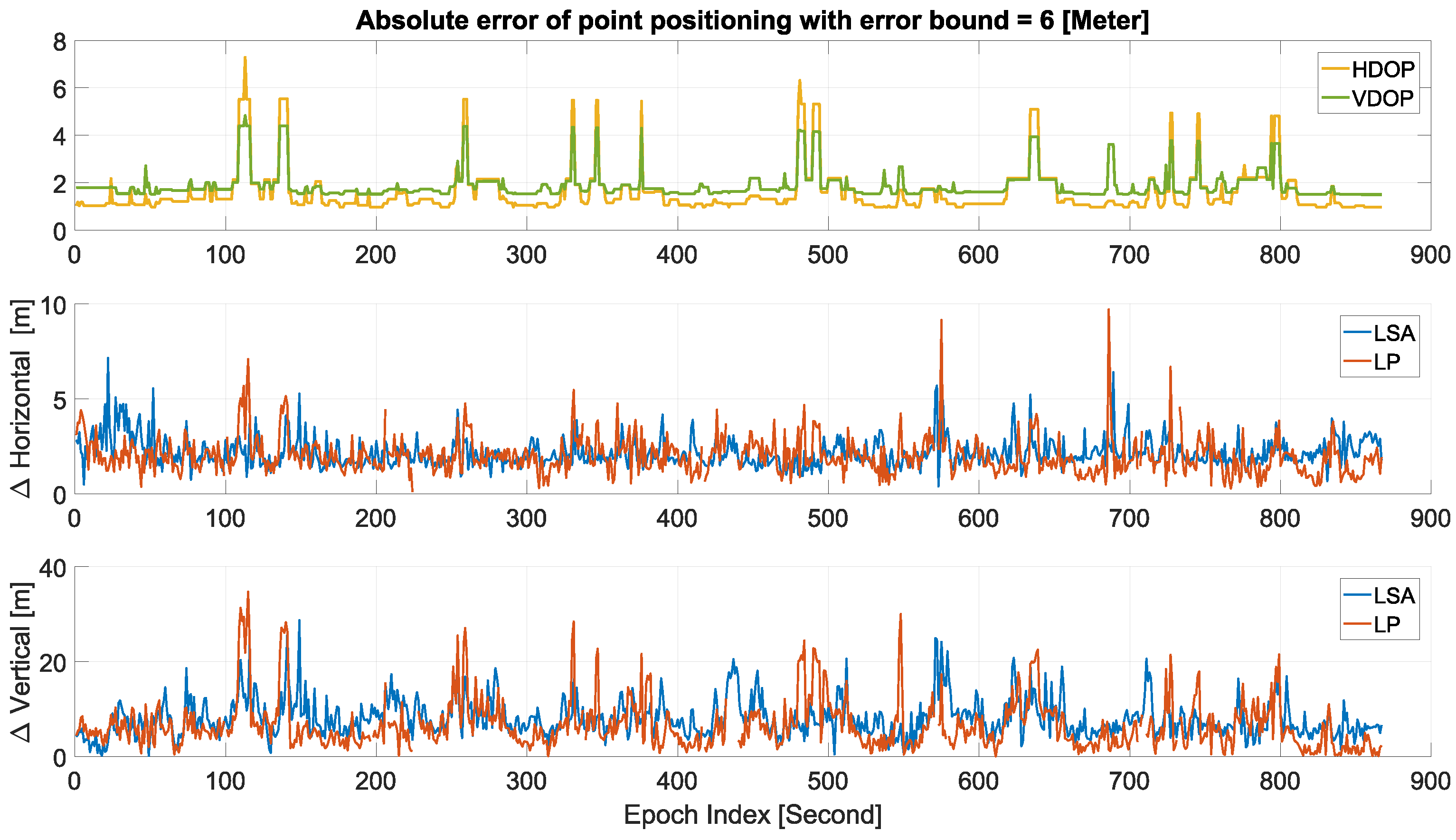
3.1. Inconsistency Measures for GPS-Derived Positioning
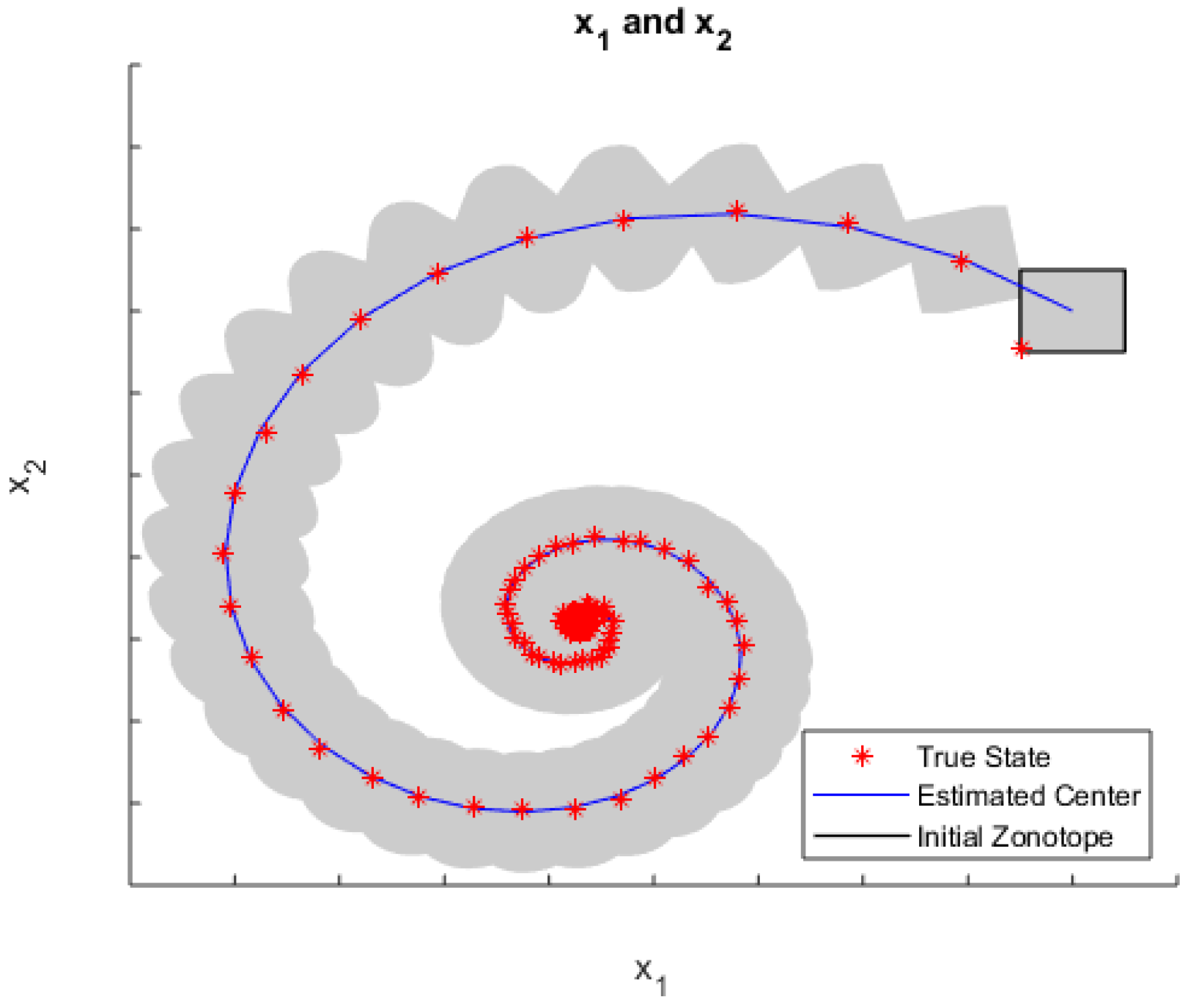
3.2. Development of a Filter Model with Integrity Measures
3.3. Integrity Information-Based Georeferencing
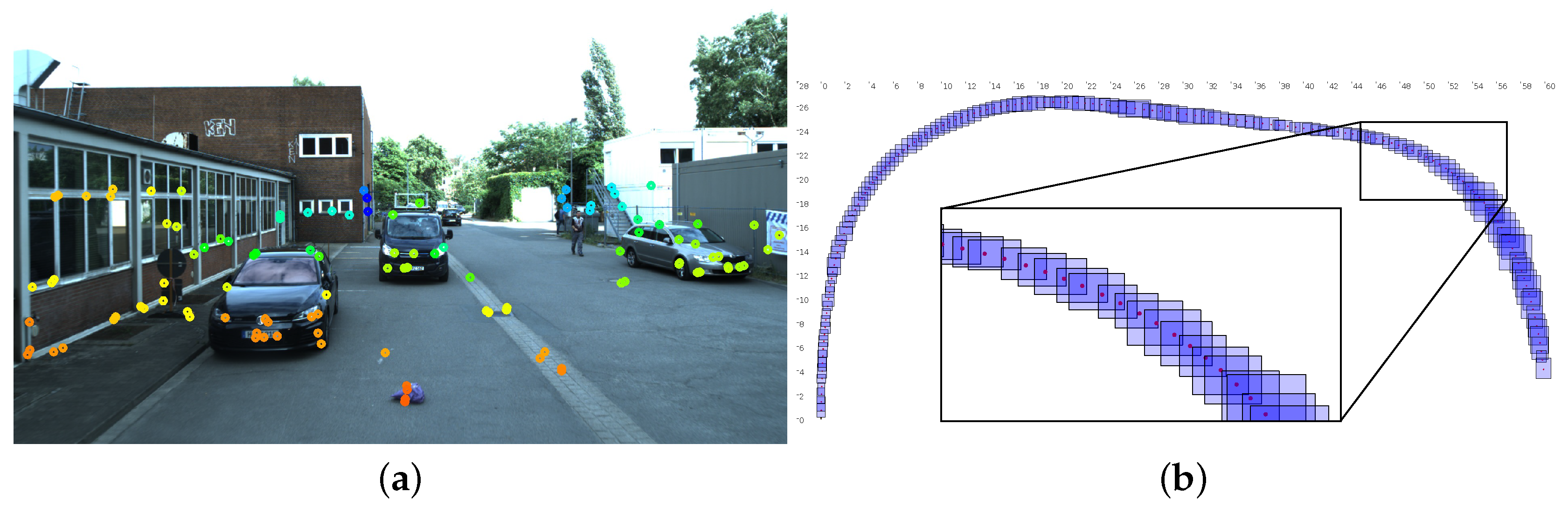
3.4. Interval-Based Simultaneous Localization and Mapping with Spatio-Temporal Uncertainties
3.5. Collaborative Acquisition of Predictive Maps
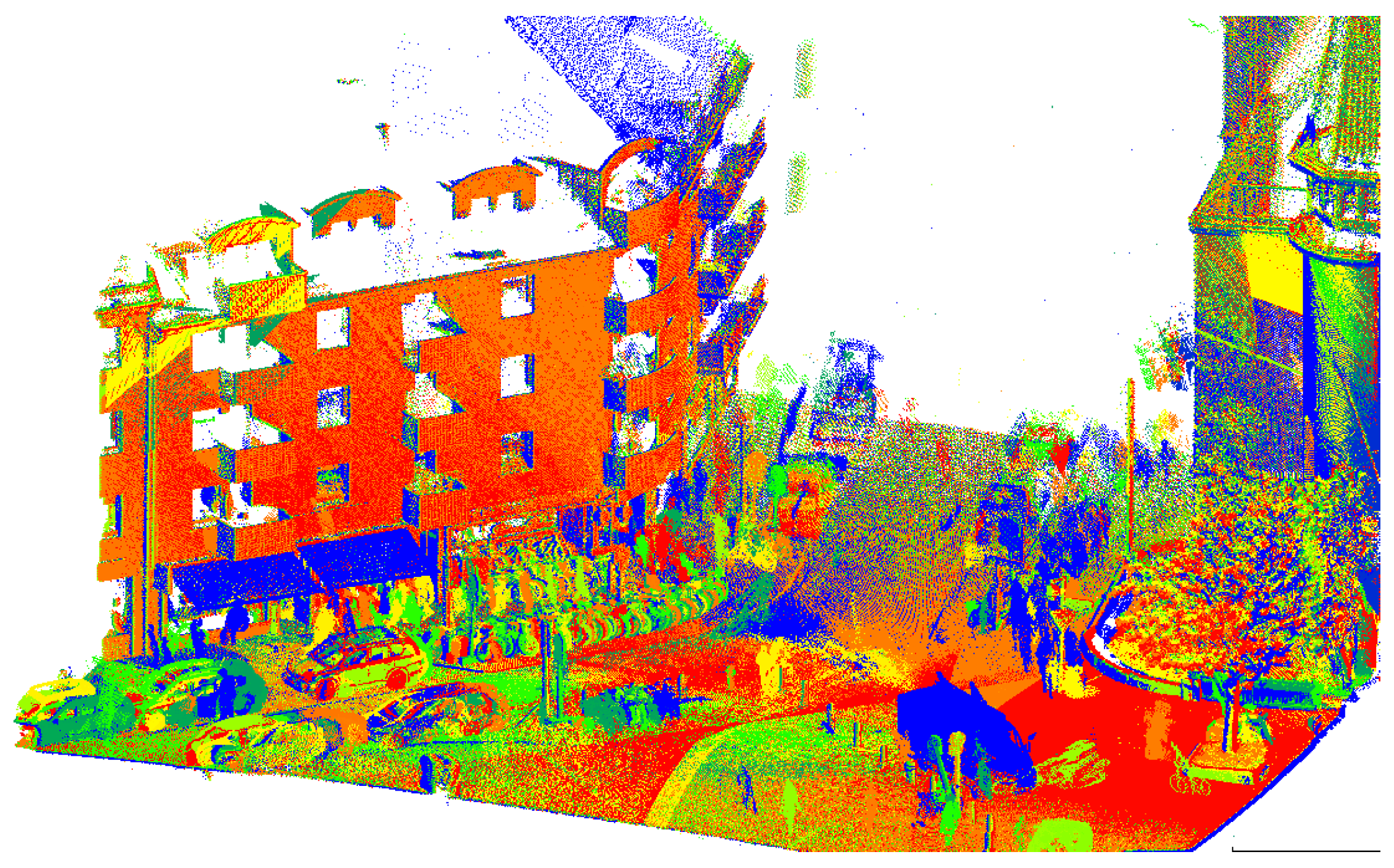
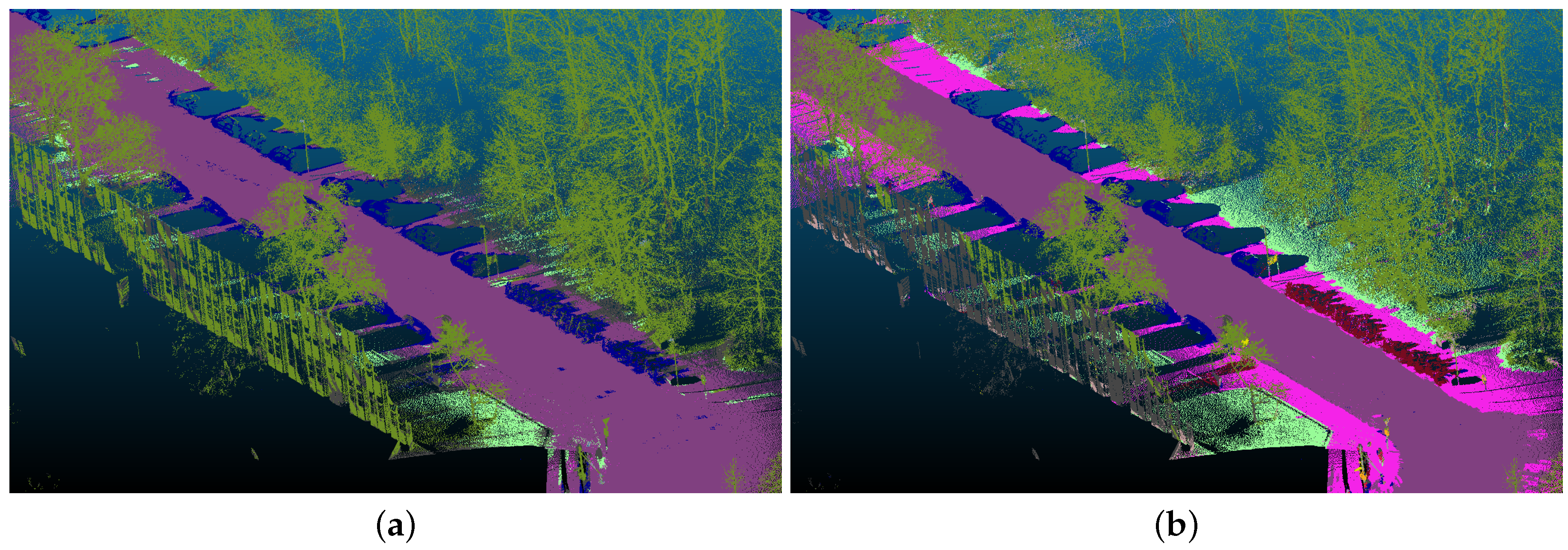
3.6. Quality Measures for 3D Semantic Segmentation Using Deep Learning
3.7. Optimal Collaborative Positioning
3.8. Dynamic Control Information for the Relative Positioning of Nodes in a Sensor Network
3.9. Collaborative Pedestrian Tracking
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hegarty, C.; Leva, J.; Dyke, K.V.; Walter, T. Performance of Stand-Alone GNSS. In Understanding GPS/GNSS— Principles and Applications, 3rd ed.; Kaplan, E., Hegarty, C., Eds.; Artech House Boston: Norwood, MA, USA, 2017; Chapter 7. [Google Scholar]
- DO-229D. Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment; RTCA: Washington, DC, USA, 2006. [Google Scholar]
- ICAO Doc 9849. Global Navigation Satellite System (GNSS) Manual; ICAO: Montreal, QC, Canada, 2005. [Google Scholar]
- Zhu, N.; Marais, J.; Betaille, D.; Berbineau, M. GNSS Position Integrity in Urban Environments: A Review of Literature. IEEE Trans. Intell. Transp. Syst. 2018, 1–17. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Axelrad, P. Autonomous GPS Integrity Monitoring Using the Pseudorange Residual. Navigation 1988, 35, 255–274. [Google Scholar] [CrossRef]
- Brown, R. Receiver Autonomous Integrity Monitoring. In Global Positioning System: Theory and Applications; Parkinson, B.W., Enge, P., Axelrad, P., Spilker, J.J., Eds.; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 1996; pp. 143–165. [Google Scholar]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A. Advanced RAIM User Algorithm Description: Integrity Support Message Processing, Fault Detection, Exclusion, and Protection Level Calculation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; Volume 4, pp. 2828–2849. [Google Scholar]
- Hegarty, C.; Ligler, G.T.; Alexander, K.; Chesto, L.; Moses, H.; Wichgers, J.M.; Enge, P.; Erlandson, B.; Dierendonck, A.V.; Azoulai, L.; et al. RTCA SC-159: 30 Years of Aviation GPS Standards. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 877–896. [Google Scholar]
- Toledo-Moreo, R.; Betaille, D.; Peyret, F.; Laneurit, J. Fusing GNSS, Dead-Reckoning, and Enhanced Maps for Road Vehicle Lane-Level Navigation. IEEE J. Sel. Top. Signal Proc. 2009, 3, 798–809. [Google Scholar] [CrossRef]
- Quddus, M.A.; Ochieng, W.Y.; Noland, R.B. Integrity of map-matching algorithms. Transp. Res. Part C Emerg. Technol. 2006, 14, 283–302. [Google Scholar] [CrossRef]
- JCGM 101. Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement (GUM 1995 with Minor Corrections); JCGM: Sevres, France, 2008. [Google Scholar]
- Teunissen, P. Quality control in integrated navigation systems. IEEE Aerosp. Electr. Syst. Mag. 1990, 5, 35–41. [Google Scholar] [CrossRef]
- Brown, A.; Sturza, M. The Effect of Geometry on Integrity Monitoring Performance. In Proceedings of the 46th Annual Meeting of the Institute of Navigation, Atlantic, NJ, USA, 26–28 June 1990. [Google Scholar]
- Neumann, I. Zur Modellierung Eines Erweiterten Unsicherheitshaushaltes in Parameterschätzung und Hypothesentests. Ph.D. Thesis, University Karlsruhe, Deutsche Geodätische Kommission, DGK (Reihe C, 634), Munich, Germany, 2009. [Google Scholar]
- Schön, S.; Kutterer, H. Uncertainty in GPS Networks due to Remaining Systematic Errors: The Interval Approach. J. Geod. 2006, 80, 150–162. [Google Scholar] [CrossRef]
- Jaulin, L.; Kieffer, M.; Didrit, O.; Walter, É. Applied Interval Analysis; Springer: London, UK, 2001. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Kreinovich, V.; Wu, B.; Xiang, G. Computing Statistics under Interval and Fuzzy Uncertainty: Applications to Computer Science and Engineering (Studies in Computational Intelligence); Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Klir, G.J. Uncertainty and Information. Foundations of Generalized Information Theory; Wiley-IEEE Press: Hoboken, NJ, USA, 2006. [Google Scholar]
- Möller, B.; Beer, M. Fuzzy Randomness; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar] [CrossRef]
- Ferson, S.; Ginzburg, L.; Kreinovich, V.; Nguyen, H.; Starks, S. Uncertainty in risk analysis: towards a general second-order approach combining interval, probabilistic, and fuzzy techniques. World Congress on Computational Intelligence. In Proceedings of the IEEE International Conference on Fuzzy Systems, Honolulu, HI, USA, 12–17 May 2002. [Google Scholar] [CrossRef]
- Alkhatib, H.; Neumann, I.; Kutterer, H. Uncertainty modeling of random and systematic errors by means of Monte Carlo and fuzzy techniques. J. Appl. Geod. 2009, 3, 67–79. [Google Scholar] [CrossRef]
- Schön, S.; Kutterer, H. A comparative analysis of uncertainty modelling in GPS data analysis. In Dynamic Planet; Springer: Berlin/Heidelberg, Germany, 2006; pp. 137–142. [Google Scholar] [CrossRef]
- Drevelle, V.; Bonnifai, P. High integrity GNSS location zone characterization using interval analysis. In Proceedings of the ION GNSS, Savannah, GA, USA, 22–25 September 2009; pp. 2178–2187. [Google Scholar]
- Drevelle, V.; Bonnifait, P. A set-membership approach for high integrity height-aided satellite positioning. GPS Solut. 2011, 15, 357–368. [Google Scholar] [CrossRef]
- Hanebeck, U. Lokalisierung Eines Mobilen Roboters Mittels Effizienter Auswertung von Sensordaten und Mengenbasierter Zustandsschä Tzung; VDI-Verlag: Dusseldorf, Germany, 1997. [Google Scholar]
- Kieffer, M.; Jaulin, L.; Walter, É.; Meizel, D. Robust Autonomous Robot Localization Using Interval Analysis. Reliable Computing. Reliab. Comput. 2000, 6, 337–362. [Google Scholar] [CrossRef]
- Langerwisch, M.; Wagner, B. Guaranteed Mobile Robot Tracking Using Robust Interval Constraint Propagation. In Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 354–365. [Google Scholar] [CrossRef]
- Rohou, S.; Jaulin, L.; Mihaylova, L.; Bars, F.L.; Veres, S.M. Guaranteed computation of robot trajectories. Robot. Autom. Syst. 2017, 93, 76–84. [Google Scholar] [CrossRef]
- Skog, I.; Handel, P. In-Car Positioning and Navigation Technologies—A Survey. IEEE Trans. Intell. Transp. Syst. 2009, 10, 4–21. [Google Scholar] [CrossRef]
- De Ponte Müller, F. Survey on Ranging Sensors and Cooperative Techniques for Relative Positioning of Vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef] [PubMed]
- Groves, P.D.; Wang, L.; Walter, D.; Martin, H.; Voutsis, K.; Jiang, Z. The four key challenges of advanced multisensor navigation and positioning. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium—PLANS, Monterey, CA, USA, 5–8 May 2014; pp. 773–792. [Google Scholar] [CrossRef]
- Kealy, A.; Retscher, G.; Toth, C.; Hasnur-Rabiain, A.; Gikas, V.; Grejner-Brzezinska, D.; Danezis, C.; Moore, T. Collaborative Navigation as a Solution for PNT Applications in GNSS Challenged Environments—Report on Field Trials of a Joint FIG/IAG Working Group. J. Appl. Geod. 2015, 9, 244–263. [Google Scholar] [CrossRef]
- Stefanidis, A.; Nittel, S. GeoSensor Networks; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Kokuti, A.; Hussein, A.; Marin-Plaza, P.; de la Escalera, A.; Garcia, F. V2X communications architecture for off-road autonomous vehicles. In Proceedings of the 2017 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Vienna, Austria, 27–28 June 2017. [Google Scholar] [CrossRef]
- Bailey, T.; Bryson, M.; Mu, H.; Vial, J.; McCalman, L.; Durrant-Whyte, H. Decentralised cooperative localisation for heterogeneous teams of mobile robots. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef]
- Knuth, J.; Barooah, P. Collaborative 3D localization of robots from relative pose measurements using gradient descent on manifolds. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar] [CrossRef]
- Prorok, A.; Bahr, A.; Martinoli, A. Low-cost collaborative localization for large-scale multi-robot systems. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012. [Google Scholar] [CrossRef]
- Muhle, D. Gegenseitige Orientierung von Mehrkamerasystemen mit Nicht überlappendem Sichtfeld; Wissenschaftliche Arbeiten der Fachrichtung; Geodäsie und Geoinformatik der Leibniz Universität Hannover: Hanover, Germany, 2011. [Google Scholar]
- Paffenholz, J.A.; Brenner, C.; Sester, M. Collaborative positioning using landmark maps. In Proceedings of the 5th ACM SIGSPATIAL International Workshop on Computational Transportation Science—IWCTS’12, Orlando, FL, USA, 5–8 November 2013; ACM Press: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Barth, A.; Siegemund, J.; Meißner, A.; Franke, U.; Förstner, W. Probabilistic Multi-class Scene Flow Segmentation for Traffic Scenes. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2010; pp. 503–512. [Google Scholar] [CrossRef]
- Scharwächter, T.; Enzweiler, M.; Franke, U.; Roth, S. Efficient Multi-cue Scene Segmentation. In Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; pp. 435–445. [Google Scholar] [CrossRef]
- Zia, M.Z.; Stark, M.; Schiele, B.; Schindler, K. Detailed 3D Representations for Object Recognition and Modeling. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2608–2623. [Google Scholar] [CrossRef] [PubMed]
- Kar, A.; Tulsiani, S.; Carreira, J.; Malik, J. Category-specific object reconstruction from a single image. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar] [CrossRef]
- Brenner, C. Extraction of Features from Mobile Laser Scanning Data for Future Driver Assistance Systems. In Advances in GIScience; Sester, M., Bernard, L., Paelke, V., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 25–42. [Google Scholar]
- Brenner, C. Global Localization of Vehicles Using Local Pole Patterns. Pattern Recognition; Denzler, J., Notni, G., Süße, H., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 61–70. [Google Scholar]
- Schlichting, A.; Brenner, C. Vehicle Localization by LIDAR Point Correlation Improved by Change Detection. ISPRS 2016, XLI-B1, 703–710. [Google Scholar]
- Grafarend, E.W.; Sansò, F. Optimization and Design of Geodetic Networks; Springer: Berlin, Germany, 1985. [Google Scholar]
- Kuang, S. Geodetic Network Analysis and Optimal Design: Concepts And Applications; Ann Arbor Press: Chelsea, MI, USA, 1996. [Google Scholar]
- Jäger, R. Analyse und Optimierung GeodäTischer Netze Nach Spektralen Kriterien und Mechanische Analogien. Ph.D. Thesis, University Karlsruhe, Deutsche Geodätische Kommission, DGK (Reihe C, 342), Munich, Germany, 1988. [Google Scholar]
- Schö, S. Analyse und Optimierung GeodäTischer Messanordnungen unter Besonderer Berücksichtigung des Intervallansatzes. Ph.D. Thesis, University Karlsruhe, Deutsche Geodätische Kommission, DGK (Reihe C, 567), Munich, Germany, 2003. [Google Scholar]
- Betaille, D.; Chapelon, A.; Lusetti, B.; Kais, M.; Millescamps, D. High Integrity Reference Trajectory for Benchmarking Land Navigation Data Fusion Methods. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007. [Google Scholar] [CrossRef]
- Bonnifait, P. Cooperative localization for autonomous cars. Lessons learned from the Grand Cooperative Driving Challenge. In Proceedings of the European Conference on Mobile Robotics, Paris, France, 6–8 September 2017. [Google Scholar]
- Krawinkel, T.; Schön, S. Benefits of receiver clock modeling in code-based GNSS navigation. GPS Solut. 2015, 20, 687–701. [Google Scholar] [CrossRef]
- Brenner, C. Scalable estimation of precision maps in a MapReduce framework. In Proceedings of the 24th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems—GIS’16, Burlingame, CA, USA, 31 October–3 November 2016; ACM Press: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Schön, S. Interval-based reliability and integrity measures. In Proceedings of the 8th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing NAVITEC, Noordwijk, The Netherlands, 14–16 December 2016. [Google Scholar]
- Sun, L.; Dbouk, H.; Neumann, I.; Schön, S.; Kreinovich, V. Taking into Account Interval (and Fuzzy) Uncertainty Can Lead to More Adequate Statistical Estimates. In Fuzzy Logic in Intelligent System Design; Springer International Publishing: Berlin, Germany, 2017; pp. 371–381. [Google Scholar] [CrossRef]
- Schön, S.; Kutterer, H. Realistic Uncertainty Measures for GPS Observations. In A Window on the Future of Geodesy; International Association of Geodesy Symposia; Sansò, F., Ed.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 128. [Google Scholar]
- Dbouk, H.; Schön, S. Comparison of Different Bounding Methods for Providing GPS Integrity Information. In Proceedings of the IEEE/ION PLANS, Monterey, CA, USA, 23–26 April 2018. [Google Scholar]
- Chen, G.; Wang, J.; Shieh, L.S. Interval Kalman Filtering. IEEE Trans. Aerosp. Electr. Syst. 1997, 33, 250–259. [Google Scholar] [CrossRef]
- Xiong, J.; Jauberthie, C.; Trave-Massuyes, L. Improvements in computational aspects of interval Kalman filtering enhanced by constraint propagation. In Proceedings of the 2013 IEEE 11th International Workshop of Electronics, Control, Measurement, Signals and Their Application to Mechatronics, Toulouse, France, 24–26 June 2013. [Google Scholar] [CrossRef]
- Sun, L.; Alkhatib, H.; Kargoll, B.; Kreinovich, V.; Neumann, I. A New Kalman Filter Model for Nonlinear Systems Based on Ellipsoidal Bounding. arXiv, 2018; arXiv:1802.02970. [Google Scholar]
- Sun, L.; Alkhatib, H.; Paffenholz, J.A.; Neumann, I. Geo-Referencing of a Multi-Sensor System Based on Set-membership Kalman Filter. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018. [Google Scholar]
- Combastel, C. Merging Kalman Filtering and Zonotopic State Bounding for Robust Fault Detection under Noisy Environment. IFAC-hlPapersOnLine 2015, 48, 289–295. [Google Scholar] [CrossRef]
- Vogel, S.; Alkhatib, H.; Neumann, I. Accurate indoor georeferencing with kinematic multi sensor systems. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016. [Google Scholar] [CrossRef]
- Vogel, S.; Alkhatib, H.; Neumann, I. Iterated Extended Kalman Filter with Implicit Measurement Equation and Nonlinear Constraints for Information-Based Georeferencing. In Proceedings of the 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018. [Google Scholar]
- Voges, R.; Wieghardt, C.S.; Wagner, B. Timestamp Offset Determination between and Actuated Laser Scanner and its Corresponding Motor. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-1/W1, 99–106. [Google Scholar] [CrossRef]
- Voges, R.; Wieghardt, C.S.; Wagner, B. Finding Timestamp Offsets for a Multi-Sensor System Using Sensor Observations. Photogramm. Eng. Remote Sens. 2018, 84, 357–366. [Google Scholar] [CrossRef]
- Schachtschneider, J.; Schlichting, A.; Brenner, C. Assessing temporal behavior in lidar point clouds of urban environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 543–550. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid Scene Parsing Network. arXiv, 2017; arXiv:1612.01105v2. [Google Scholar]
- Garcia Fernández, N.; Schön, S. Development of a simulation tool for collaborative navigation systems. In Proceedings of the 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Garcia Fernández, N.; Schön, S. Evaluating an LKF Simulation Tool for Collaborative Navigation Systems. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 1455–1464. [Google Scholar]
- Ozuysal, M.; Lepetit, V.; Fua, P. Pose estimation for category specific multiview object localization. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009. [Google Scholar] [CrossRef]
- Villamizar, M.; Grabner, H.; Andrade Cetto, J.; Sanfeliu, A.; Van Gool, L.; Moreno-Noguer, F.; Leuven, K. Efficient 3D object detection using multiple pose-specific classifiers. In Proceedings of the British Machine Vision Conference, Dundee, UK, 29 August–2 September 2011; pp. 1–20. [Google Scholar]
- Coenen, M.; Rottensteiner, F.; Heipke, C. Detection and 3D modelling of vehicles from mobile mapping stereo images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-1/W1, 505–512. [Google Scholar] [CrossRef]
- Coenen, M.; Rottensteiner, F.; Heipke, C. Recovering the 3D Pose and Shape of Vehicles from Stereo Images. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, IV-2, 73–80. [Google Scholar] [CrossRef]
- Klinger, T.; Rottensteiner, F.; Heipke, C. Probabilistic multi-person localisation and tracking in image sequences. ISPRS J. Photogramm. Remote Sens. 2017, 127, 73–88. [Google Scholar] [CrossRef]
- Nguyen, U.; Rottensteiner, F.; Heipke, C. Pedestrian Detection Using Stereo Images. In Proceedings of the 38 Wissenschaftlich—Technische Jahrestagung der DGPF und PFGK18 Tagung, München, Germany, 7–9 March 2018; Volume 27, pp. 611–623. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IfE Van | GIH Van | IKG Van | |
|---|---|---|---|
| Cameras | Allied Vision | Pointgrey | Allied Vision |
| AV MAKO G-234C | GS3-U3-23S6C-C | AV MAKO G-234C | |
| Lenses | Fujinon | Tamron | Schneider Kreuznach |
| CF12.5HA-1 | M111FM08 | Cinegon 1.8/4.8-0902 | |
| Focal length | 12.5 mm | 8.0 mm | 5.0 mm |
| Image size | 1936 × 1216 | 1920 × 1200 | 1936 × 1216 |
| Pixel size | 5.86 m | 5.86 m | 5.86 m |
| Frame rate | 25 fps | 25 fps | 25 fps |
| Base length | 0.91 m | 0.93 m | 0.85 m |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schön, S.; Brenner, C.; Alkhatib, H.; Coenen, M.; Dbouk, H.; Garcia-Fernandez, N.; Fischer, C.; Heipke, C.; Lohmann, K.; Neumann, I.; et al. Integrity and Collaboration in Dynamic Sensor Networks. Sensors 2018, 18, 2400. https://doi.org/10.3390/s18072400
Schön S, Brenner C, Alkhatib H, Coenen M, Dbouk H, Garcia-Fernandez N, Fischer C, Heipke C, Lohmann K, Neumann I, et al. Integrity and Collaboration in Dynamic Sensor Networks. Sensors. 2018; 18(7):2400. https://doi.org/10.3390/s18072400
Chicago/Turabian StyleSchön, Steffen, Claus Brenner, Hamza Alkhatib, Max Coenen, Hani Dbouk, Nicolas Garcia-Fernandez, Colin Fischer, Christian Heipke, Katja Lohmann, Ingo Neumann, and et al. 2018. "Integrity and Collaboration in Dynamic Sensor Networks" Sensors 18, no. 7: 2400. https://doi.org/10.3390/s18072400
APA StyleSchön, S., Brenner, C., Alkhatib, H., Coenen, M., Dbouk, H., Garcia-Fernandez, N., Fischer, C., Heipke, C., Lohmann, K., Neumann, I., Nguyen, U., Paffenholz, J.-A., Peters, T., Rottensteiner, F., Schachtschneider, J., Sester, M., Sun, L., Vogel, S., Voges, R., & Wagner, B. (2018). Integrity and Collaboration in Dynamic Sensor Networks. Sensors, 18(7), 2400. https://doi.org/10.3390/s18072400