1. Introduction
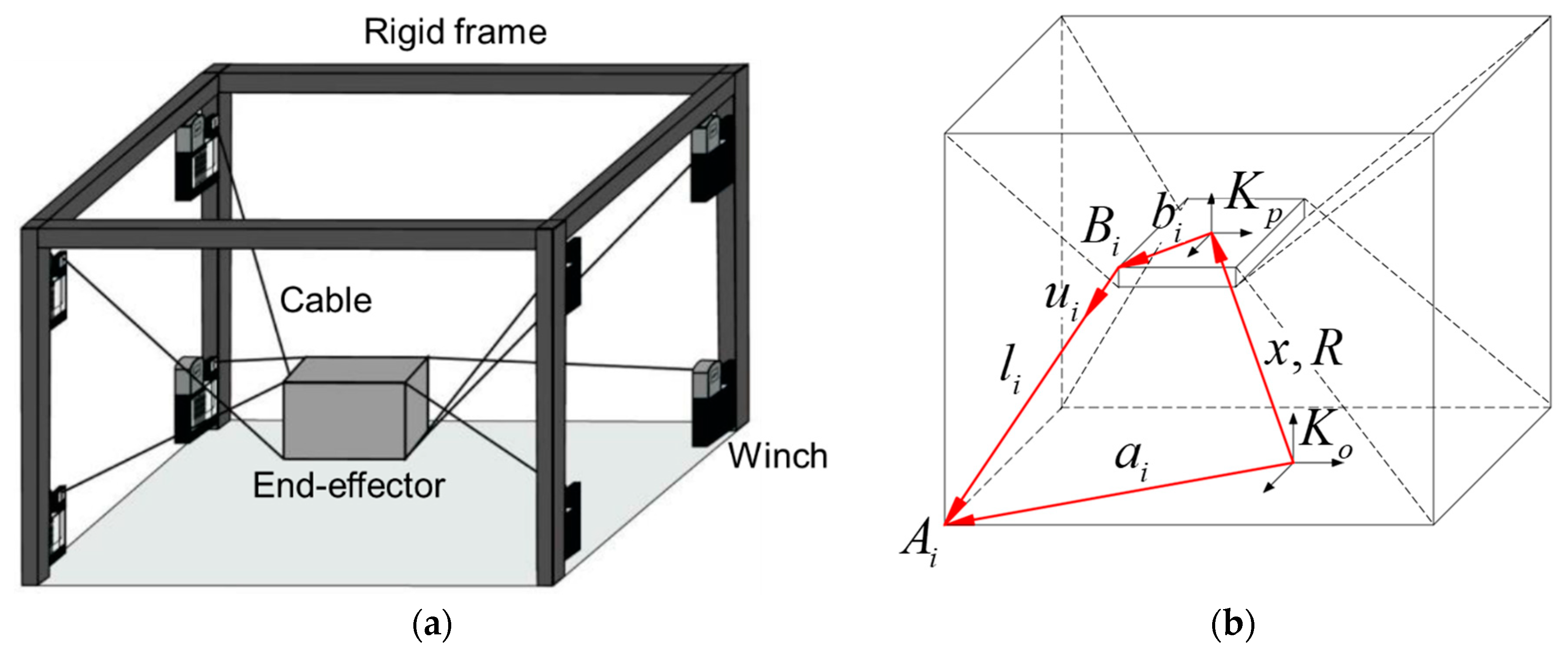
A cable-driven parallel robot (or simply called a cable robot) is a special type of parallel robot system that is actuated by multiple cables instead of rigid links to control the robot end-effector (EE)’s six degree-of-freedom (DOF) postures. The cable-driven parallel robot is composed of four basic components: a robot EE, cables, pulleys, motor-winches, and a robot frame. The robot EE is designed with respect to the required robot task and positioned within a workspace to fulfill a specific work. The cables are connected to the EE and generate six DOF spatial motions of the EE. The motor winches control the respective cable’s length and tension for a specific task, and a rigid frame composed of steel frames and walls constitutes the robot’s workspace and maintains all the cable and EE parts inside its configuration.
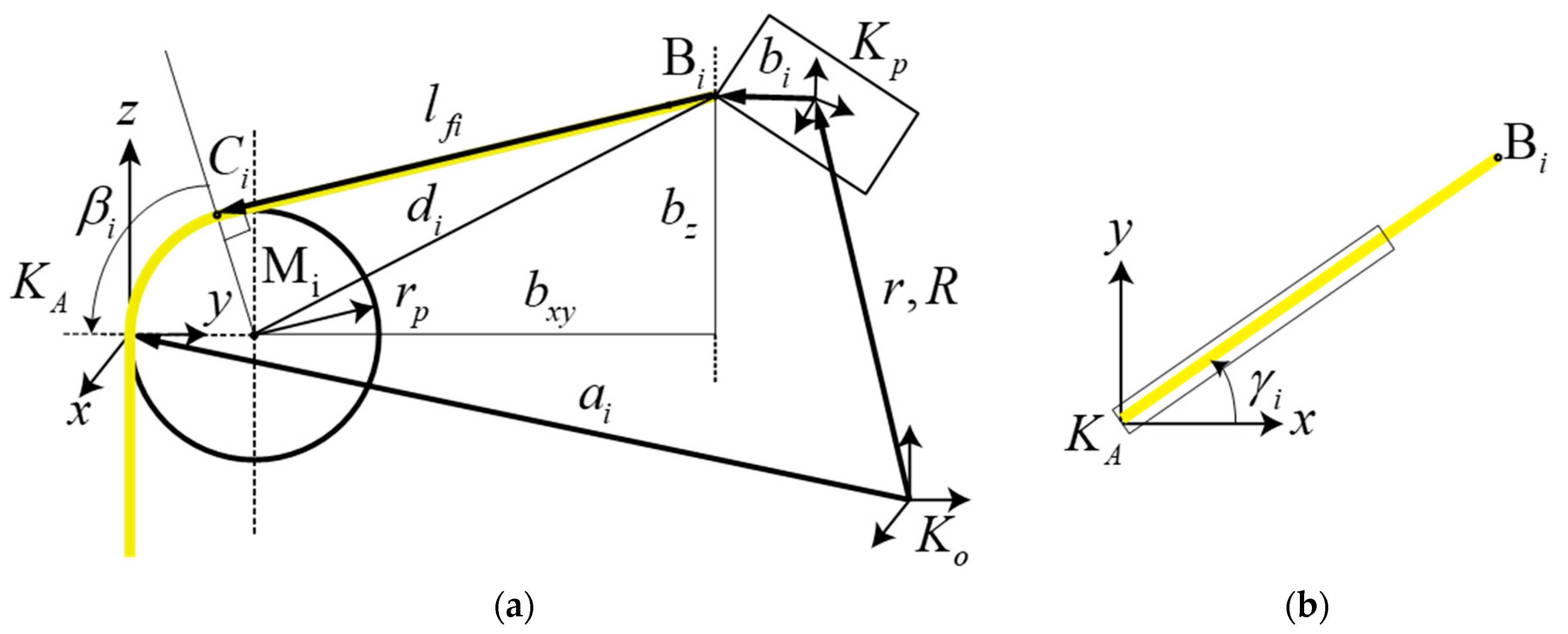
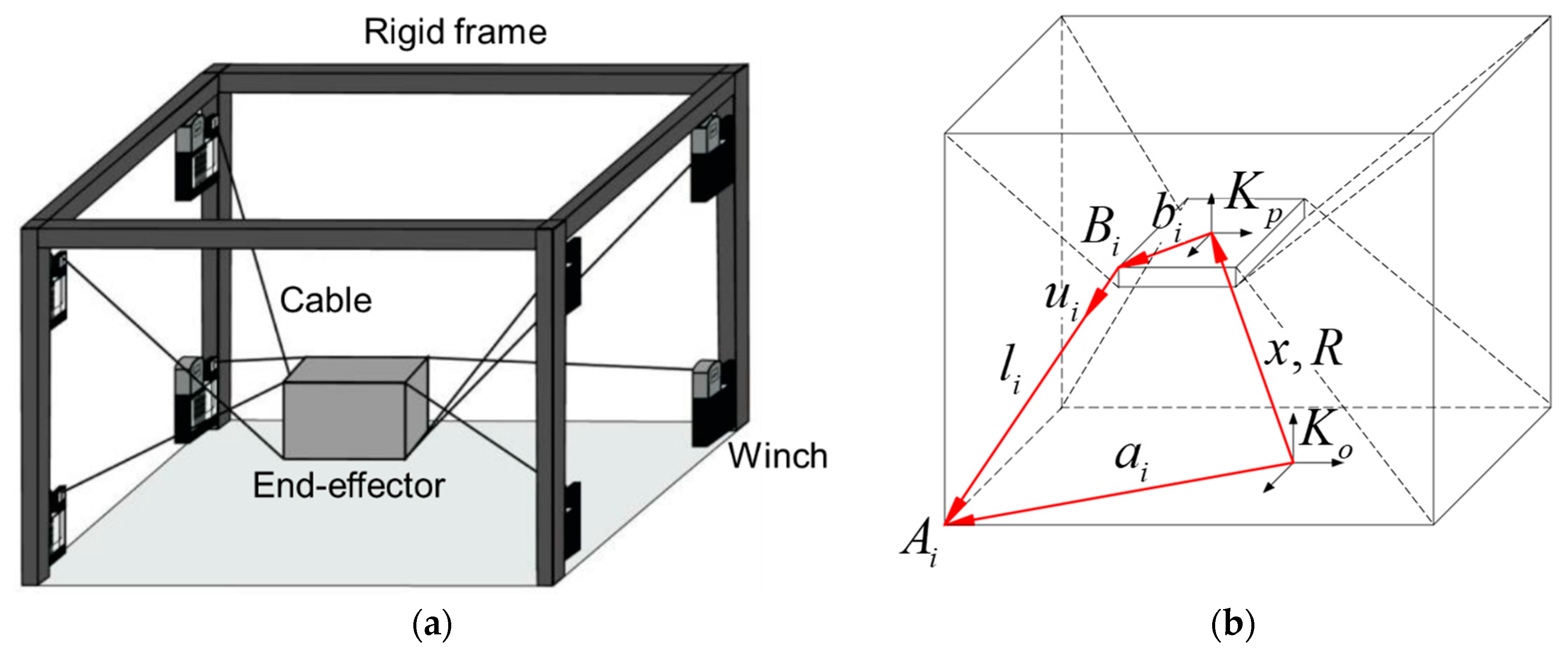
Figure 1 depicts the general configuration of the cable robot and its kinematic drawing.
The cable robot has advantages of large workspace and heavy payload ability in comparison with conventional parallel robots in industrial applications owing to its easy remounting, convenient transportation, and the low-inertia benefits of the actuator and EE [
1,
2,
3]. Hence, many attempts have been executed to widen the cable robot applications such as the SkyCam [
4], the Cablecam [
5], a demonstrator in the German Pavilion at the EXPO 2015 [
6], a high-payload transportation system [
7], and a large-workspace motion simulator [
8].
Despite those advantages, problems still remain in cable robots. First, more actuators than the necessary DOF movements are required to implement free spatial motions owing to the unidirectional actuation (pulling) nature of the cables. Next, a large frame is required to secure the workspace of the cable robot. The first problem causes the over-constrained robot kinematics issues discussed in [
9], and the second problem causes uncertainty in the robot kinematics parameters. Although the cable robot can be installed easily and possesses a variable configuration by relocating the position of the pulleys, calibration must be performed to achieve a high accuracy control; however, the aforementioned problems render challenges in attaining a qualified calibration. In detail, the kinematic equation of the eight-cable driven parallel robot shown in
Figure 1b is given by
[
7]. The geometry of the robot is described by its proximal anchor points on the robot base
, and the distal anchor point on the EE,
, which are defined by the vectors
and
, respectively. The index
i denotes the cable number, and
m is the absolute number of cables. Further,
and
describe the position and orientation, respectively, of the EE fixed frame
, with respect to the world coordinate frame
. Regarding the kinematic equation solver and control algorithm development, it is clear that all the configuration parameters need to be accurately determined before implementation, especially
for the large-size cable robot development.
Generally, to calibrate the kinematic model, the model must include the most significant geometric and nongeometric parameters that influence the control accuracy. For the cable robot, three types of geometric errors exist. The first type is a machining error of winches such as the drum diameter or the pitch length. The second is EE’s geometric parameters. The third is the position errors of the EE’s cable connection points and the pulley where the cable comes out [
10]. Nongeometric errors include cable elongations or the cable sagging effect caused by gravity and the cable material property.
Parallel robotic calibration methods [
11,
12] have been actively researched for decades with some promising results. However, cable robot calibration is an open issue. Tadokoro et al. reported a calibration method for a portable rescue crane where a mobile cable robot used for the calibration is typical [
13]. Borgstorm et al. proposed a self-calibration method based on the position and forces differences of a planar two-transform robot with four cables [
14]. The error of the calibrated robot is determined as 19.8 mm for the tension-based self-calibration, and 6.3 mm for the position-based calibration. Miermeister et al. developed a calibration method through differential kinematics model of cable robots and applied both conventional as well as auto-calibration methods to spatial cables with eight cables [
15,
16]. As the behavior of the cable robots does not depend only on the geometric parameters but notably on the material parameters such as the cable stiffness and mass, the method uses a multistage parameter identification [
17]. Generally, because a force sensor contains noise and draft errors, a limit exists in performing a precise calibration; therefore, it is difficult to perform a high-precision calibration. Sandretto et al. proposed the calibration of the RellAx8 robot using weighted least-square and self-calibration, where the model of the robot consists of the proximal and distal anchor points as well as the offsets of the cable length. However, the efficient calibration could be performed only with expensive measurement devices [
18], and the most representative sensor is the laser, LaserTraker [
19]. For the commercialization of cable robots, cost-efficient calibrations [
20] including auto-calibration are required.
Auto-calibration or self-calibration methods rely on the measurements of the internal sensors of the robots. In this case, it is required that the
n-DOFs robot contains
m >
n internal sensors. However, no specified sensors are available hitherto for the convenient and inexpensive calibration that can be performed in a short time. Further, most of the previous studies focused on the EE posture calibration based on the lumped uncertain kinematic parameters that may cause different kinematic calibration parameters for the different postures or motions of the robot. Further, the cables provide only unidirectional actuation as they can only transmit tension force, not compression force; thus, the cable elongation must be considered for the robot calibration. Among some kinematic uncertainties contained in the cable robot, the position error of the EE’s cable connection points can be minimized by machining the EE with a three-dimensional (3D) printer [
20] or by measuring the accurate 3D shape measurement device before installation, as the rigid frame is small and the pulley position can be easily measured offline. However, if we consider a wide cable robot, the calibration of the pulley’s position, which is essential in the cable robot kinematics, is another challenge for the precise robot motion because it is difficult to measure the pulley position directly within the wide-structured robot frame.
We present herein a novel cable-driven parallel robot calibration methodology based on a newly prototyped calibration sensor device made of commercially available laser distance sensors. The methods also utilize the necessary cable robot modeling such as cable deformation, pulley position identification, and robot kinematic models for accurate robot calibration. In terms of those system modeling, identification, and calibration methodology implementation to over-constrained cable robot in 3D space, this paper is a significant improvement over our previous calibration method of the cable robot in 2D plane workspace [
20,
21].
The laser distance sensor is a cheaper and easier option to incorporate than the laser tracker that is typically used in previous calibration methods. Further, the laser distance sensor has a larger measuring range than the IR sensor; subsequently, it can be applied to a cable robot calibration with a wide working range. Because the proposed method uses the laser distance sensor, it is equivalent to a type of an external calibration method. However, the proposed methodology and algorithm encounters the cable models and the kinematic constraints, and the inexpensive calibration sensor could yield accurate calibration results with few measurement points in the Cartesian space. Moreover, the algorithm is simpler and easier to implement than the existing self-calibrating method [
14] or image processing [
22].
This paper is organized as follows: in
Section 2, we present the overview of the over-constrained cable robot and the suggested calibration methodology. This is followed by the detailed explanation of the first-stage pre-calibration of the equipped components of the cable robot in
Section 3. In
Section 4, polymer cable modeling and extended pulley kinematics to improve the calibration accuracy will be discussed. Online calibration procedures including sensor measurement and kinematic parameter estimation are presented in
Section 5. The experimental setup and results are shown in
Section 6. Our concluding remarks and future works are presented in
Section 7.
5. Measurement, Identification, and Adjustment Process
5.1. Measuring Stage
One could expect that the final error of the calibration procedure generally decreases when incorporating numerous calibration data in different poses because the influence of statistical measurement errors and noise is canceled when computing with higher numbers of measurements. This intuition from conventional physical measurements is not always true because a large number of experimental measurements used in the parameter fitting may result in negative influences on the numerical computation and conditioning of the fitting algorithm. The numerical errors caused by larger test sets can exceed the benefits owing to the statistical effects. Therefore, one searches the best calibration measurement by tradeoff; either a high number of pose data for averaging the measurement errors, or a low number of poses for small numerical errors.
The effectiveness of the whole calibration procedure can only be assessed by experimental verification. In contrast, one can improve the numerical conditioning of the problem by the proper selection of the poses for the measurement posture sets. This selection can be supported by numerical simulation. Furthermore, one has to consider that the improvements through calibration are achieved in a Section of the workspace around the measurement posture sets. As observed in other works [
15], a minimum number of cable robot calibration sets exists for the condition number of approximately 25 poses. Hence, in this study, we measure 25 different posture data and utilized them in the cable robot calibration.
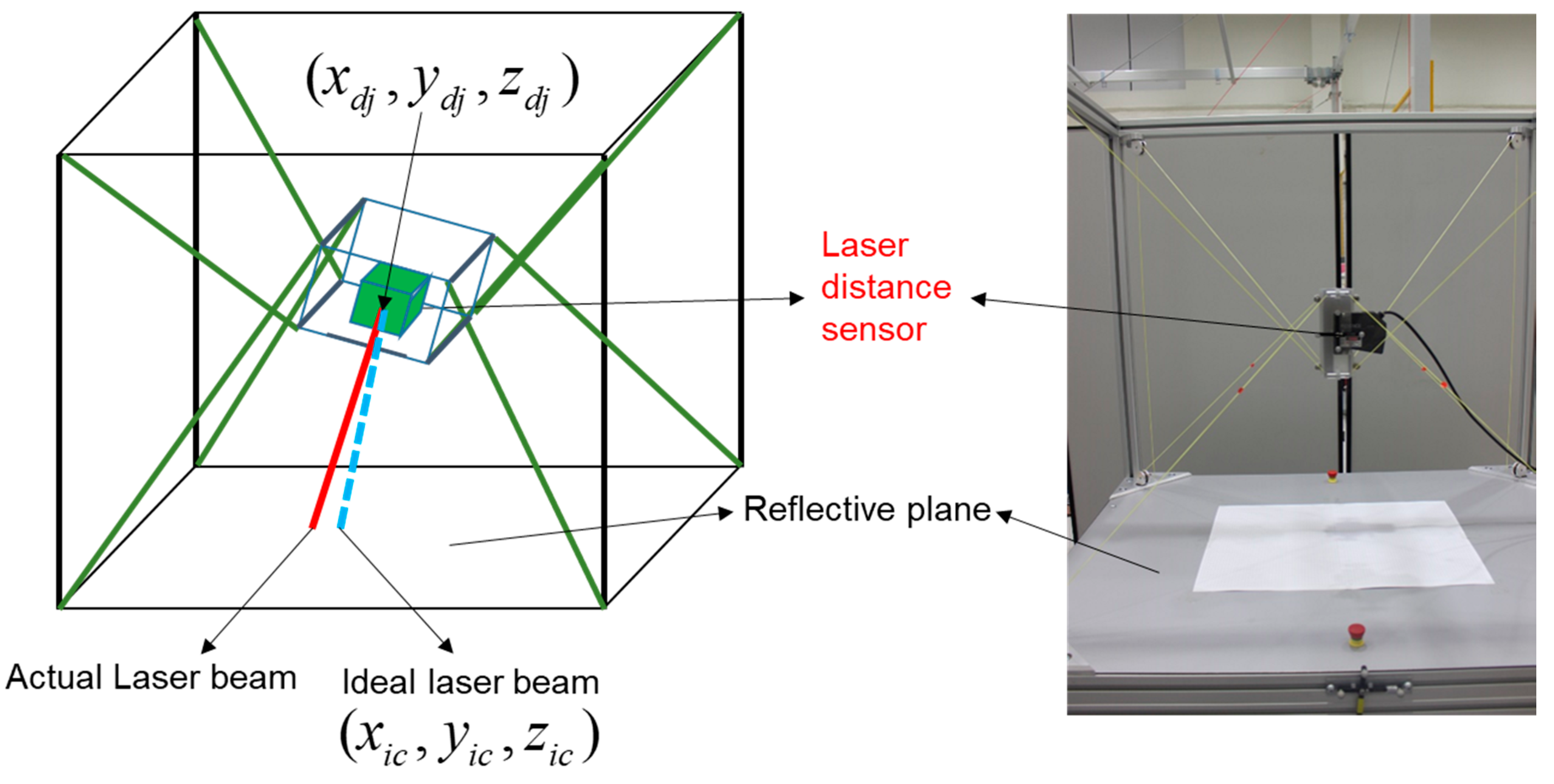
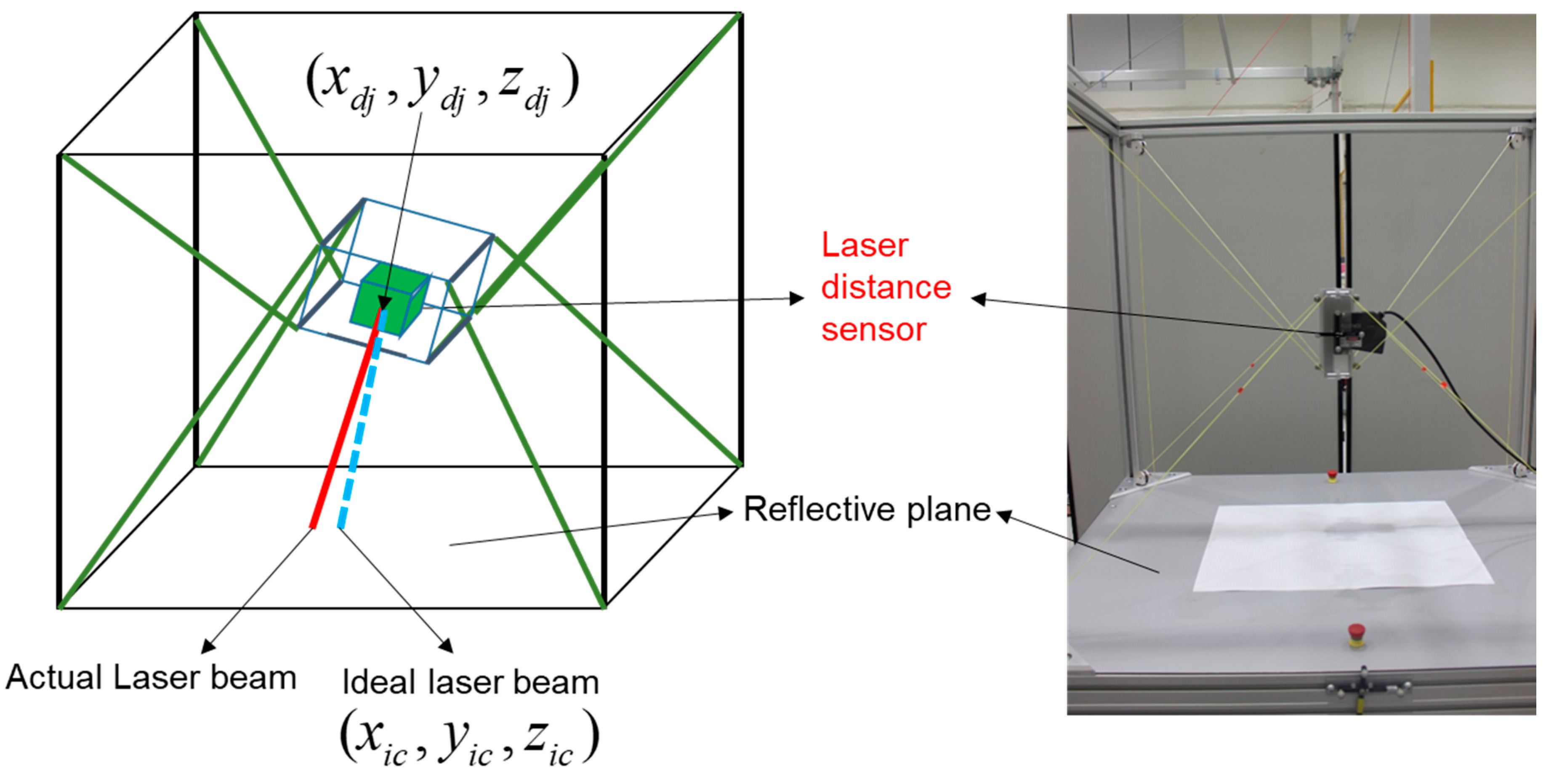
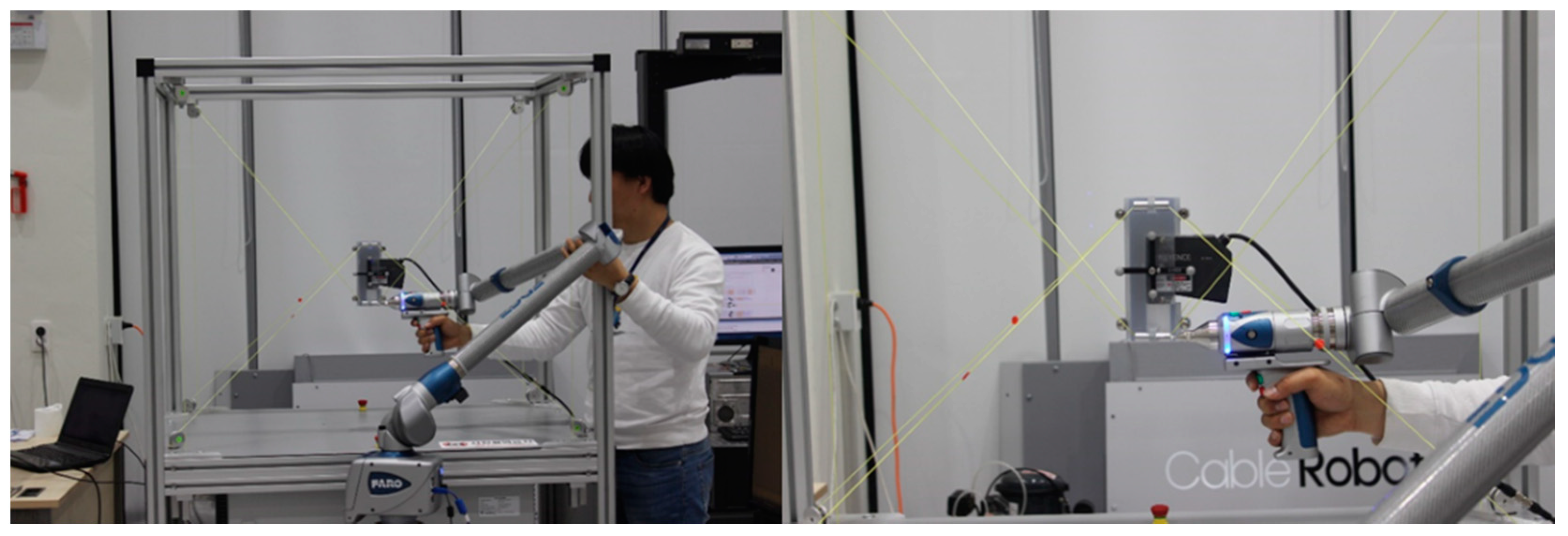
As shown in
Figure 11, the laser distance sensor is mounted at the center of the robot’s EE. Further, at each different 25 postures, we measure the laser distance sensor data and utilize them for the next processes of the cable robot geometry calibrations. The sensor beam position difference between the ideal laser beam distance obtained by kinematic equations and the actually measured laser beam distance indicates kinematic parameter errors. Ultimately the laser beam position difference necessitates the robot calibration. Briefly, the proposed calibration method is derived to match the ideal laser beam distance and the actual laser beam distance.
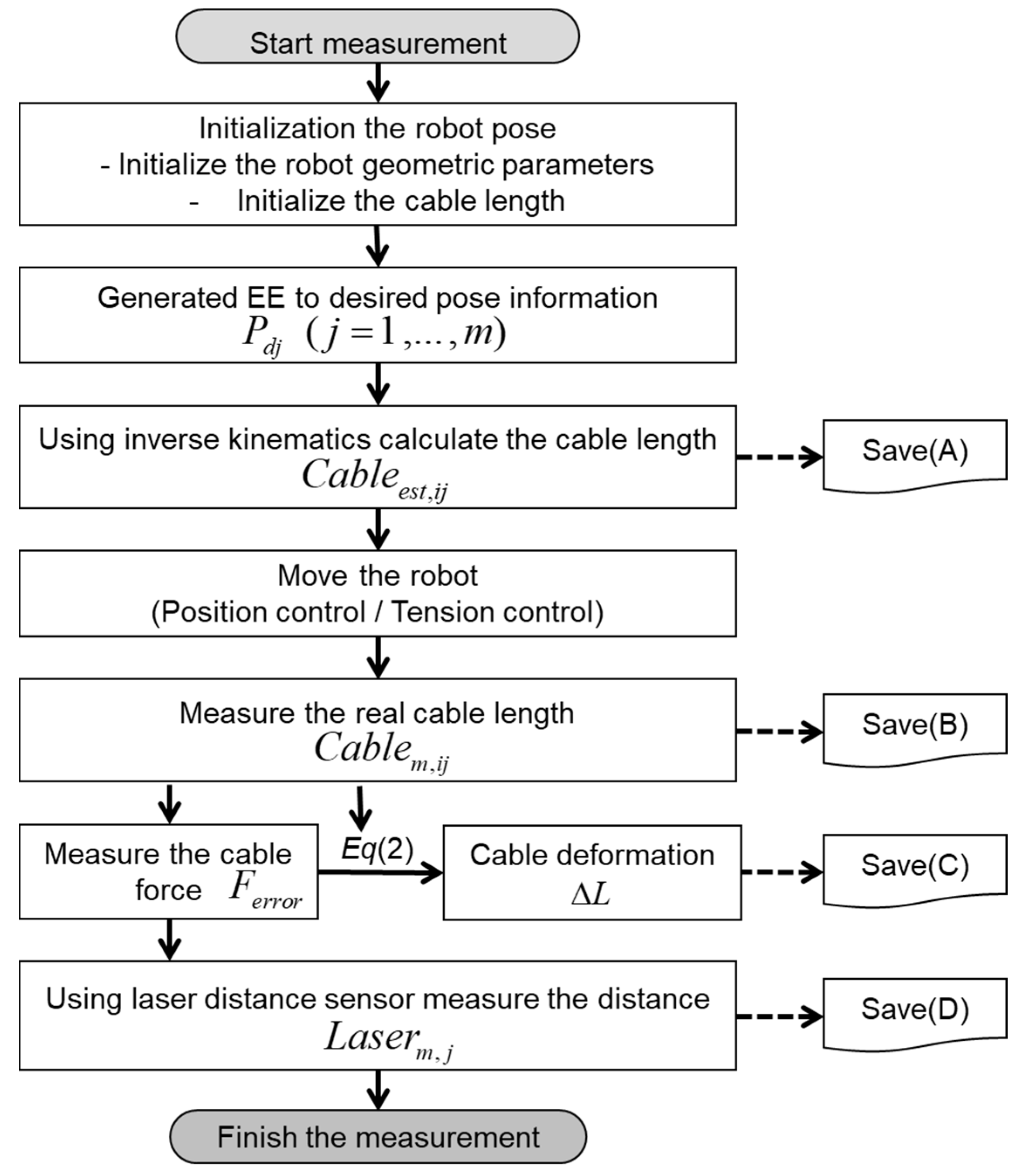
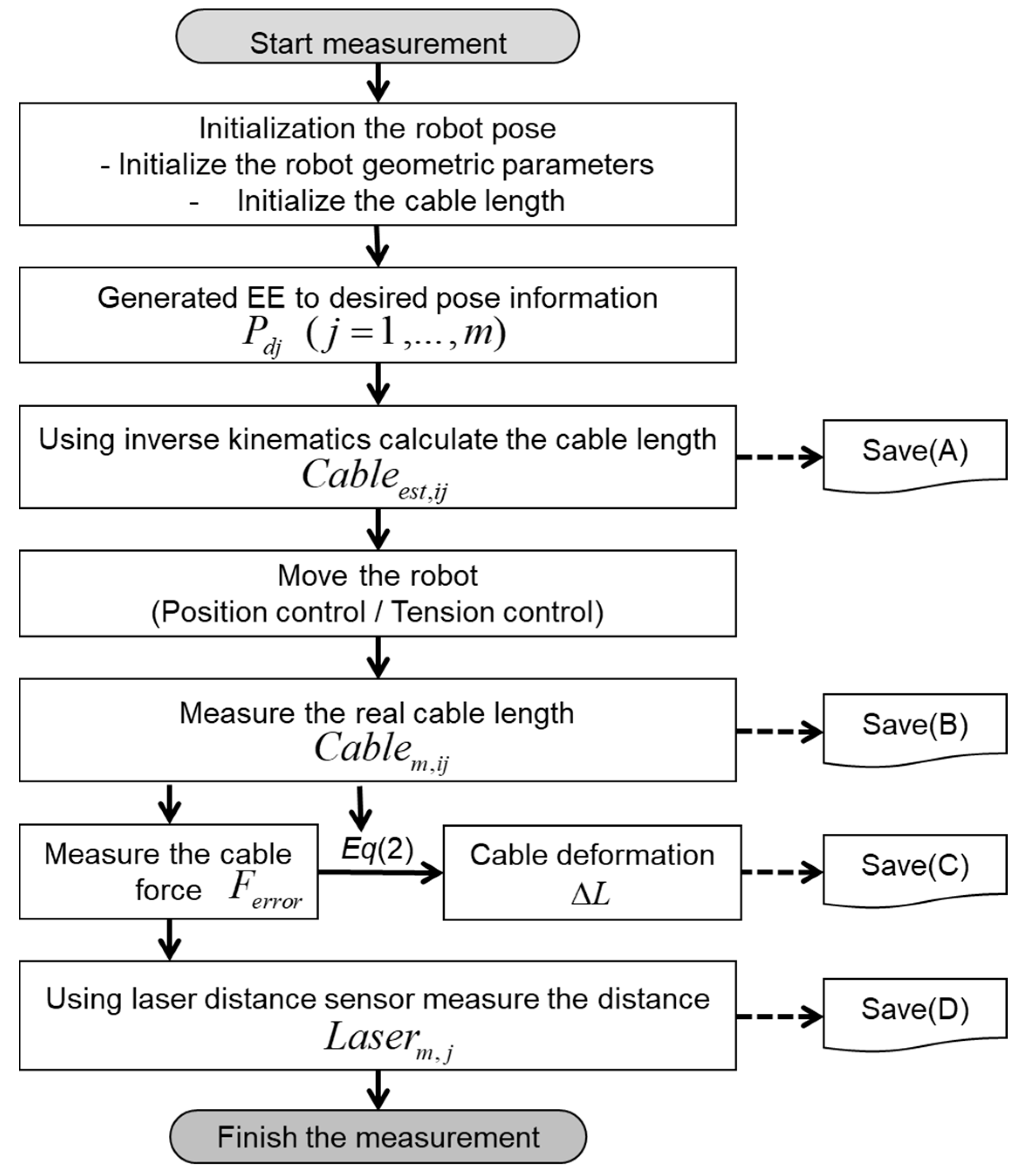
The measuring stage is depicted as a flowchart, as shown in
Figure 12, where we acquired the necessary values by moving the EE of the cable robot. First, we define the desired positions
, and calculate the desired cable length
, through the inverse kinematics of the cable robot.
For the desired position, we save the Cartesian position and cable length as [Save (A)] in the flowchart of
Figure 12. Without the robot calibration, owing to uncertain kinematic parameters including the incorrect pulley position of the large robot frame size, inaccurate motion resulted and the EE moves to another position that is defined by
. Next, we move the EE of the robot to the previous desired position using the position control. As the length of each cable obtained from the uncalibrated kinematics contains uncertainty caused by the inaccurate pulley position information and the uncalibrated kinematic parameters, some cables result in a large tension or sagging. Here, we measure and store the actual cable length
, as described by [Save (B)] in the flowchart. Further, we measure the cable tension
, as in [Save (C)] of all the cables. In this posture, the laser distance sensor measurements are also saved as a value of
in the [Save (D)] steps in
Figure 12, where
i is the number of cable and
j is the number of measurement pose defined. Finally, we could prepare all the information for the kinematics calibration in the next step.
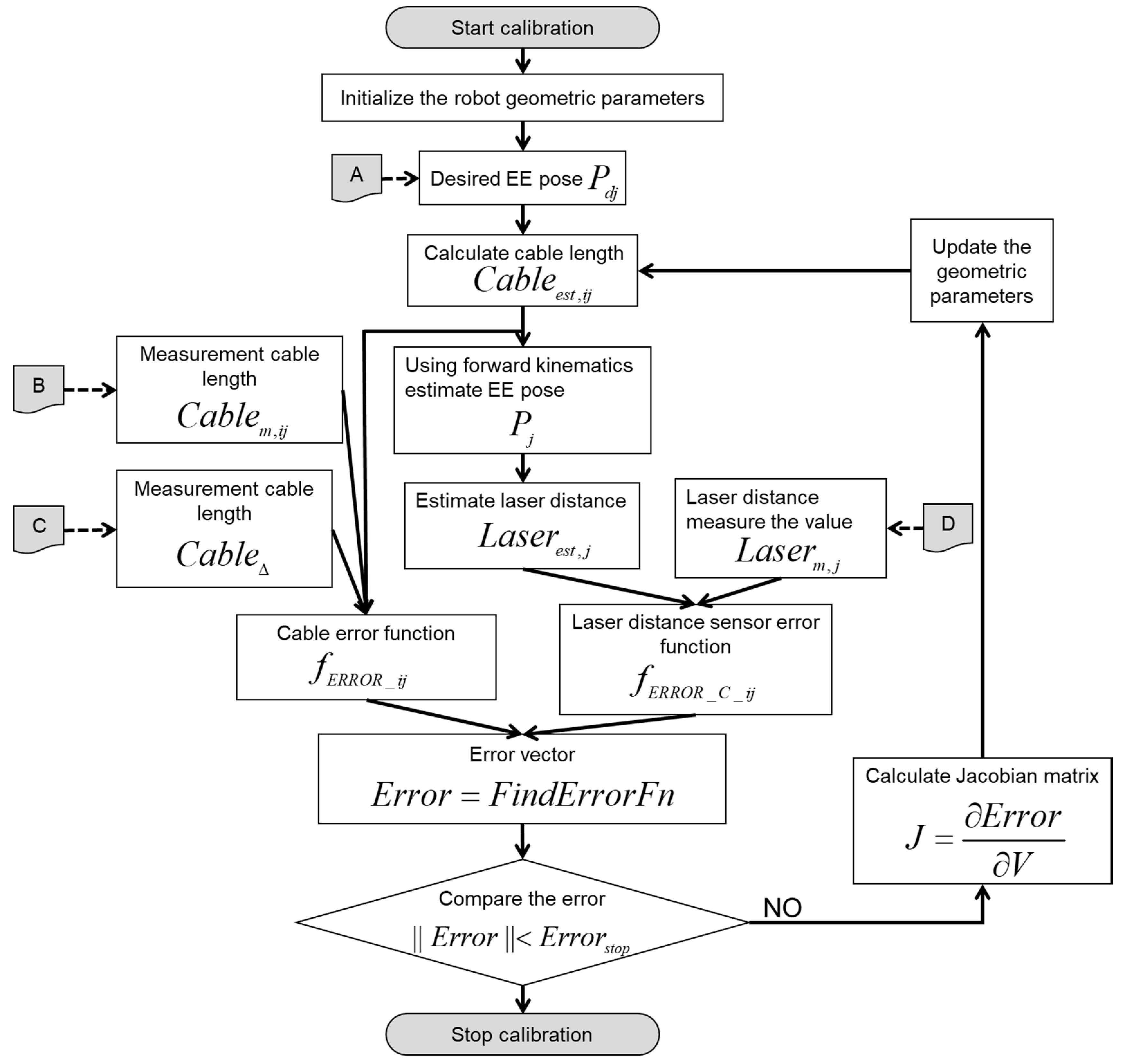
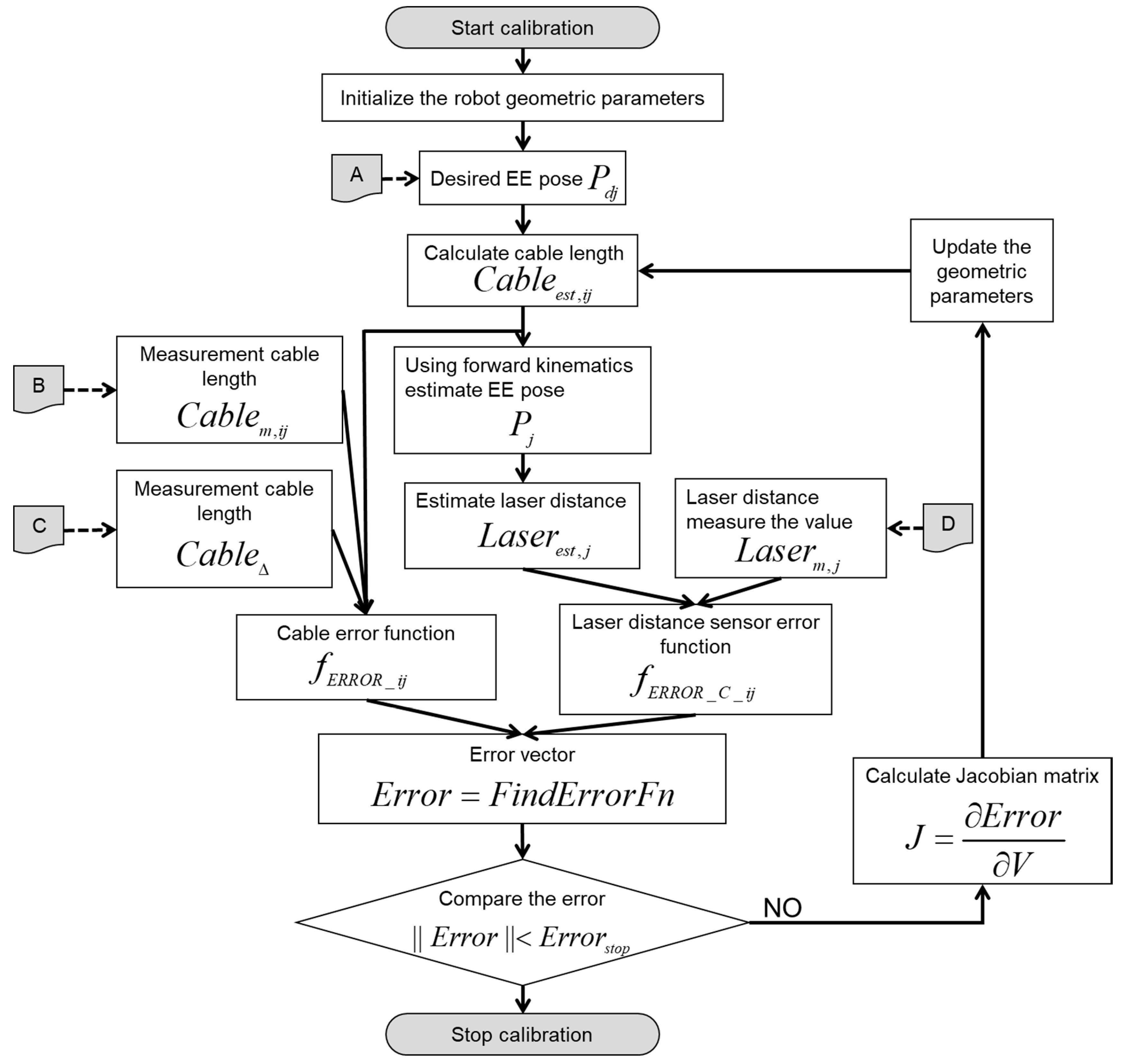
5.2. Identification Stage
The parameter identification procedure using optimization with the iterative searching method is summarized in
Figure 13.
To obtain the calibrated robot kinematics under the assumption above, we define the geometric parameter vector, , of the cable robot having 16 parameter elements, where the elements of the geometric parameter vector are the respective cable length to be estimated. As the calibration initially starts from the same EE position and the cable robot’s plane is constant after the first leveling, we can reduce the number of unknown geometry parameters to 16 from a total of 24 parameters (3 coordinate values times 8 cables). To obtain a solution for the problem, as previously mentioned, we utilized the measured and saved data sets; the difference between the measured laser distance () and the predicted laser distance (), and the difference between the measured cable length () and the predicted cable length ().
As we know the measured cable length,
to predict
, we can perform forward kinematics [
20] using the current
value. Forward kinematics obtains the pose of the EE after performing an iterative calculation to minimize the length difference in the vector closed loop obtained from the inverse kinematics. Equation (3) can be transformed into a cable length error function formulated by Equation (5) using the given current pulley positions
, and the measured cable lengths
:
To solve the forward kinematics in the given equation, a general Newton–Raphson iterative method is used. However, when a numerical method is applied when an error exists in the frame shape, the solution does not converge and leaves a certain amount of error. The proposed calibration algorithm optimizes the geometric parameters to reduce these error values. The predicted cable length
can be expressed as Equation (6), such that Equation (5) can be modified to Equation (7); therefore, the difference between the predicted cable length and the measured cable length becomes the same as the results of
:
The estimated distance from the laser distance sensor is obtained by the predicted position
of the EE through the cable robot’s forward kinematics. Assuming that the laser reflector is placed on a plane, the expected distance that the laser sensor can measure can be calculated. If we define the intersection of the laser beam and laser reflector point as
the estimated laser distance can be computed by:
As we know the actual distance from the laser distance sensor measurement,
, conducted in the previous step, we can easily compute the distance error function as the following:
By accumulating the errors calculated using the multiple desired positions (
), a final error function can be obtained as Equation (10). The error function contains
cable errors and one laser distance error for one location. If the number of desired positions is
, subsequently, a total of (
+ 1) ×
error values will be obtained. Hence, the error vector size becomes ((
+ 1) ×
) × 1:
where the geometric parameter,
, is a variable that expresses the calibrated pulley position
, which are independent variables to be calibrated. In the error function,
Error is a nonlinear function involving the numerical iteration for forward kinematics, and the best-case result is Error = 0. In other words,
is the solution of the error function in Equation (10). We use the numeric iterative method to obtain the
Error function’s solution. Hence, we calculate the discrete Jacobian matrix
J as the following Equation (11), and the (
+ 1)-th geometric parameter sets in the iterations computation is obtained using the
-th
and
J as shown in Equation (12):
where
represents the pseudo-inverse of the Jacobian, and
λ (0 <
λ < 1) represents the under-relaxation parameter for convergence safety. The iteration computation is continued until the absolute value of
Error becomes less than the preset Estop (
), and the value of the ending point becomes the final geometric parameter vector
.
5.3. Calibrated Parameter Adjustment Stage
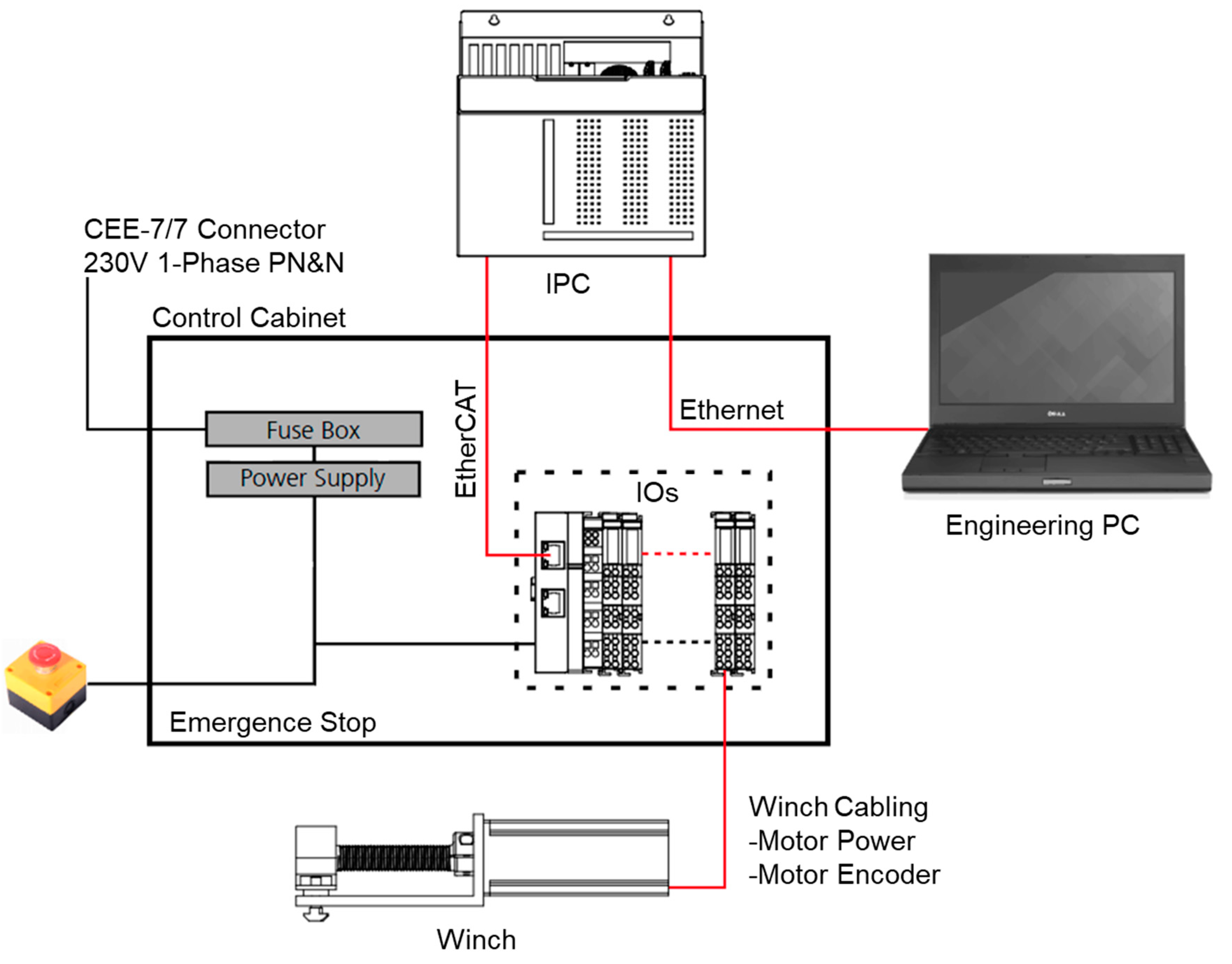
We utilize the automation device specification (ADS) of the controller to implement the online calibration procedures. The ADS is the communication protocol of TwinCAT. It enables the data exchange between two different devices. The ADS is media-independent and can communicate via serial or network connections, and the necessary hardware interfaces are provided for communication with third-party software such as MATLAB. We programmed the identification algorithm in MATLAB and implemented the online auto-calibration method using ADS in real-time communication with a PLC controller for the robot motion control. Finally, we can obtain the real-time geometry parameter through MATLAB and adjust the calibrated pulley geometric parameters to the actual on-site controller.
6. Experimental Validation of the Auto-Calibration Method
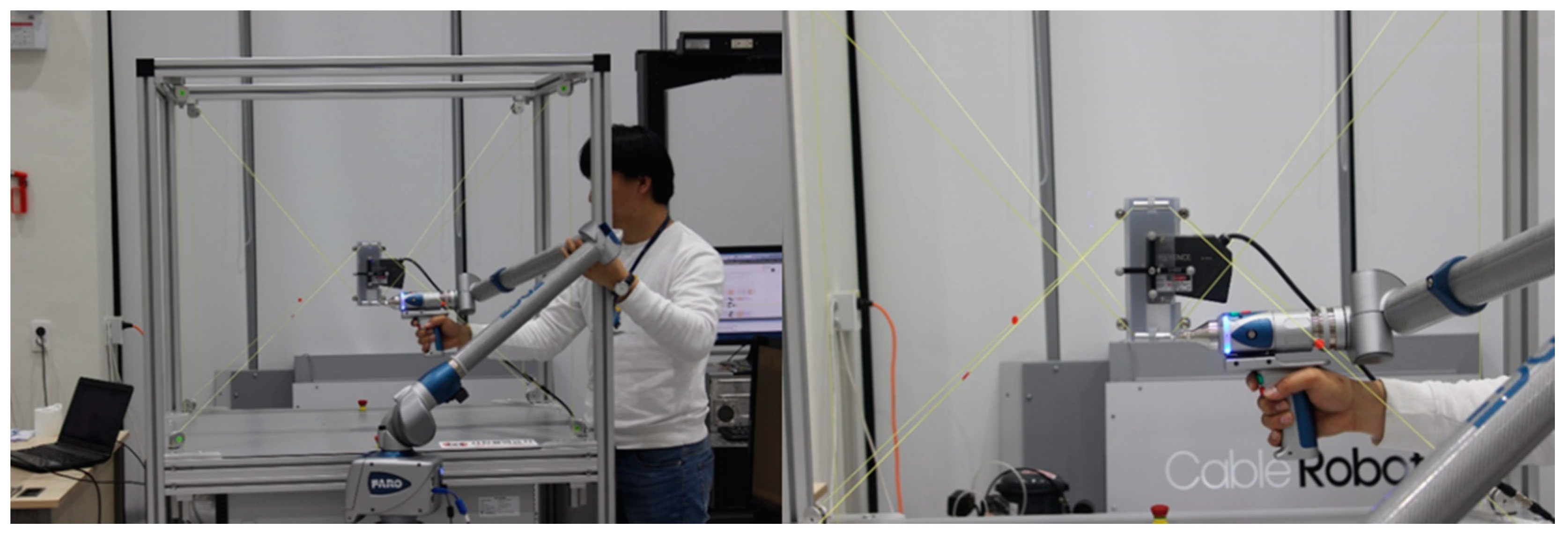
We conducted the cable robot EE control experiments for different pulley position information by referencing ISO9283 standards that describe robot accuracy measurements. The performance of the suggested method can be verified by comparing the actual EE’s position and the posture accuracy comparison for the different values of
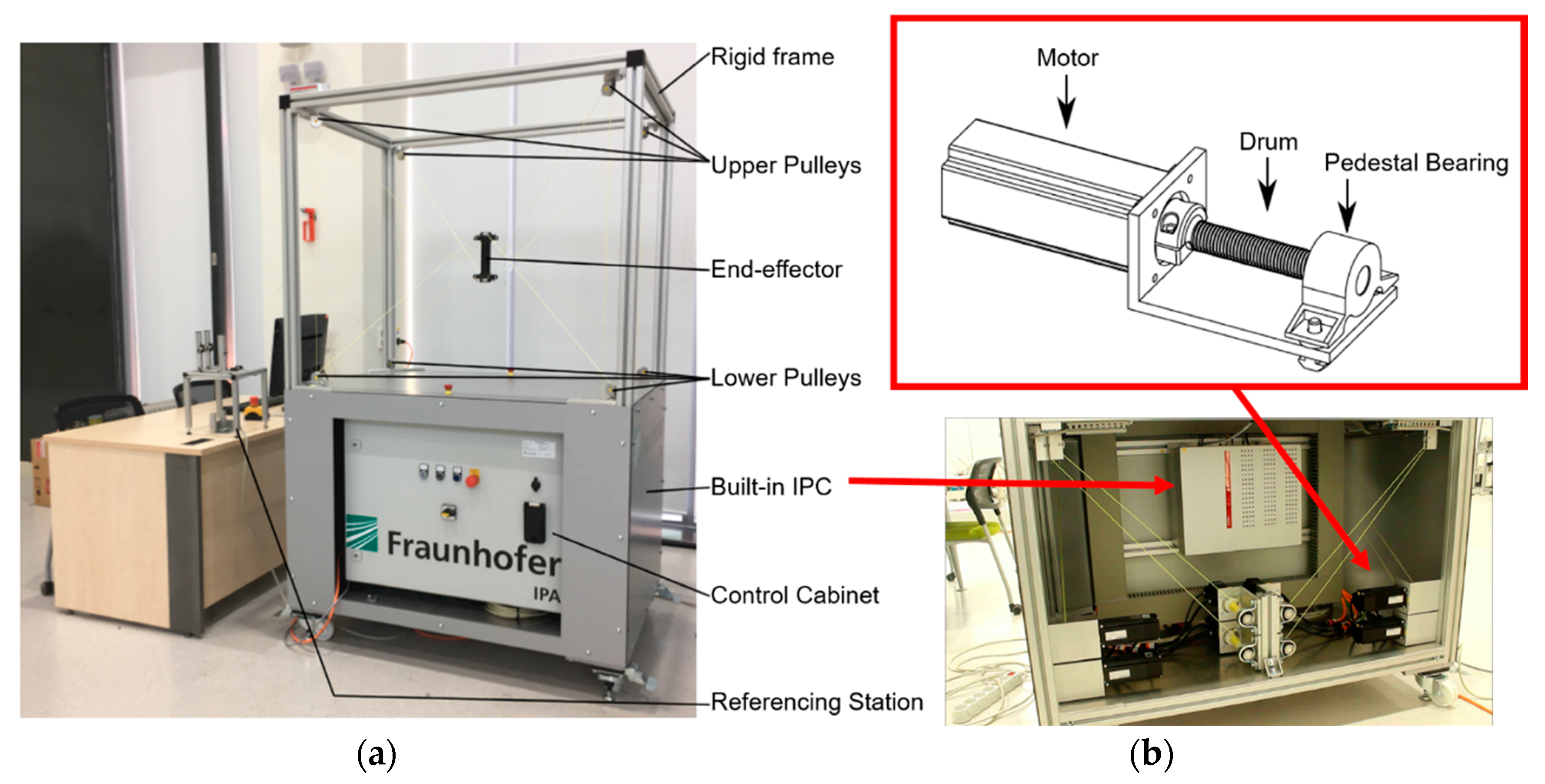
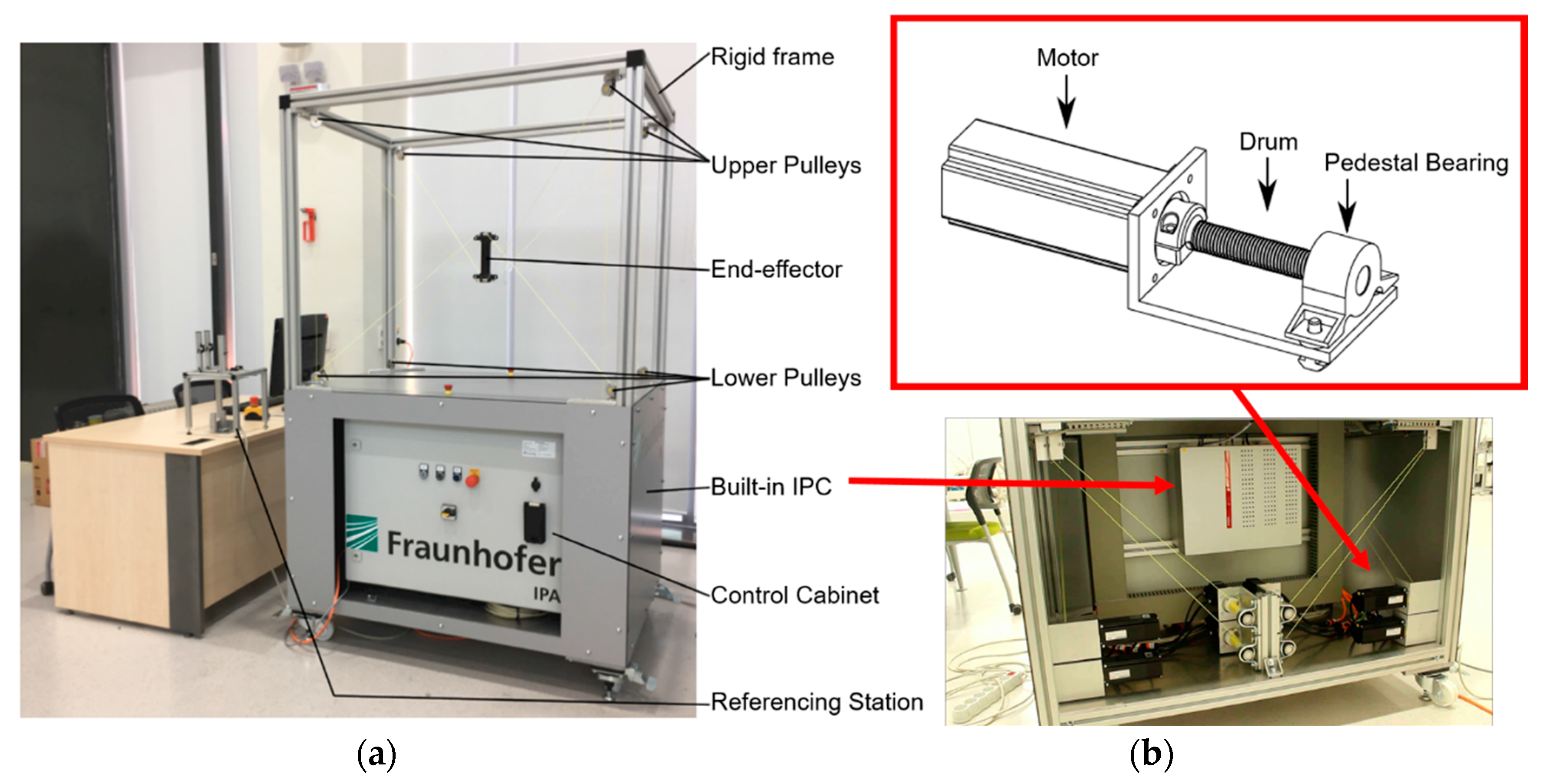
. As show in
Figure 14, the EE’s six DOF position and postures are measured by a Faro edge ScanArm instrument. The MINI cable robot was used for the experiments and the explained algorithms were implemented on the real robot controller for the actual validation. To assume the unknown frame size of the MINI cable robot, the initial guessed frame size was set by the 3D Solidworks drawings, and the experiment was conducted with no warm up before the calibration. To verify the performance of the suggested methodology, we tested the algorithm for the three different values of
; (1) drawings from the 3D modeling tool in SolidWorks, (2) 3Dl position measuring Equipment (Faro edge ScanArm HD) and (3) calibration data from our algorithm. The measured data are shown in
Table 1.
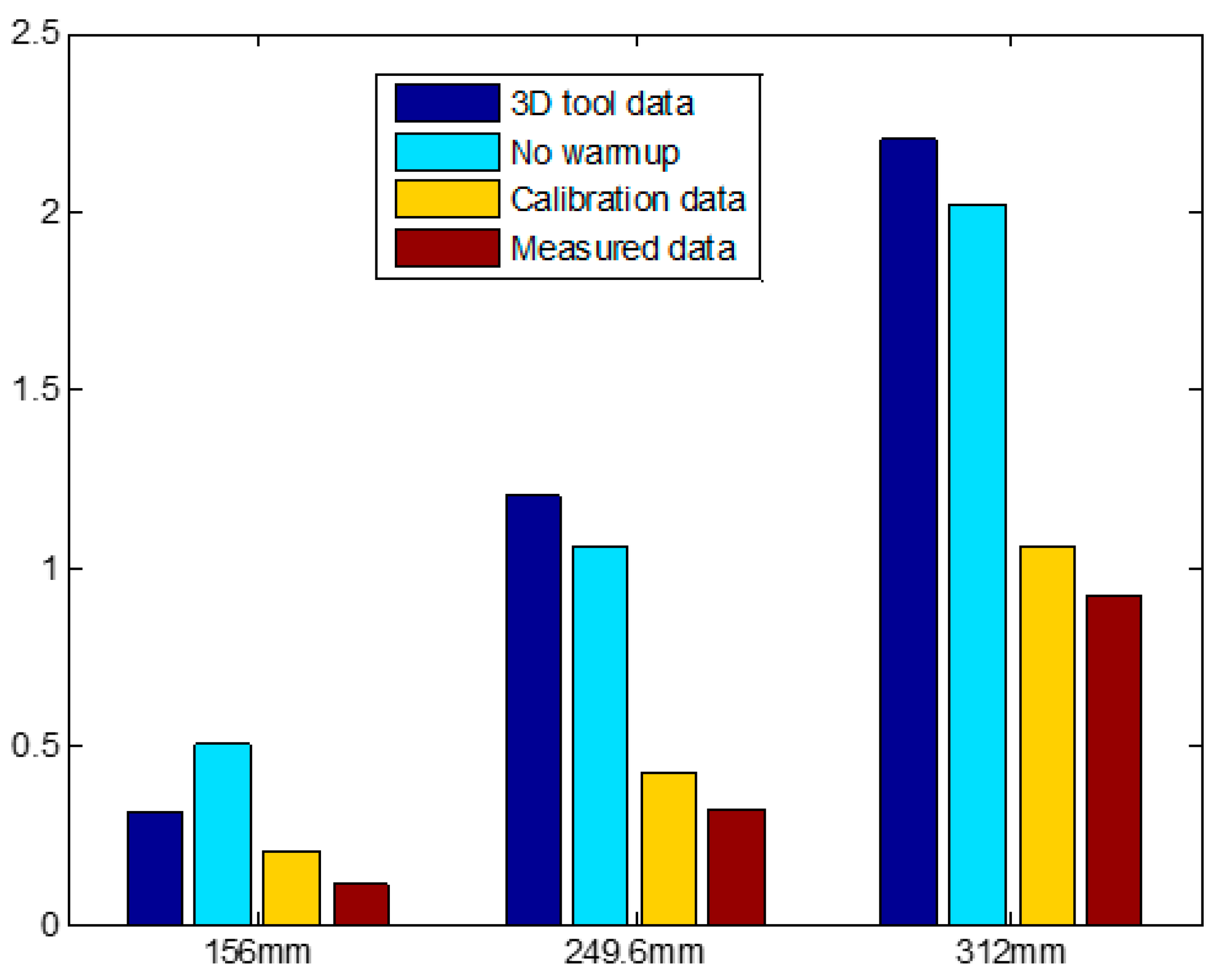
Figure 15 shows the summarized results of the geometric error obtained by comparison between three different geometry identification methods in
Table 1, and the actual robot size measurements. For the MINI cable robot, the center of the workspace and thus the measurement box [
25] coincide with the origin of the coordinate system. Hence, the 100%, 80%, and 50% box sizes are 312 mm, 249.6 mm, and 156 mm, respectively. In the results, the measurements from the precise 3D reverse drawing equipment show the best performance, and the proposed single-laser distance-sensor-based method shows the second most accurate results. However, the geometry error differences are insignificant (under 0.2 mm in each coordinate); subsequently, we verified that the proposed method can be used as a high-quality geometry calibration method with inexpensive sensor utilization.
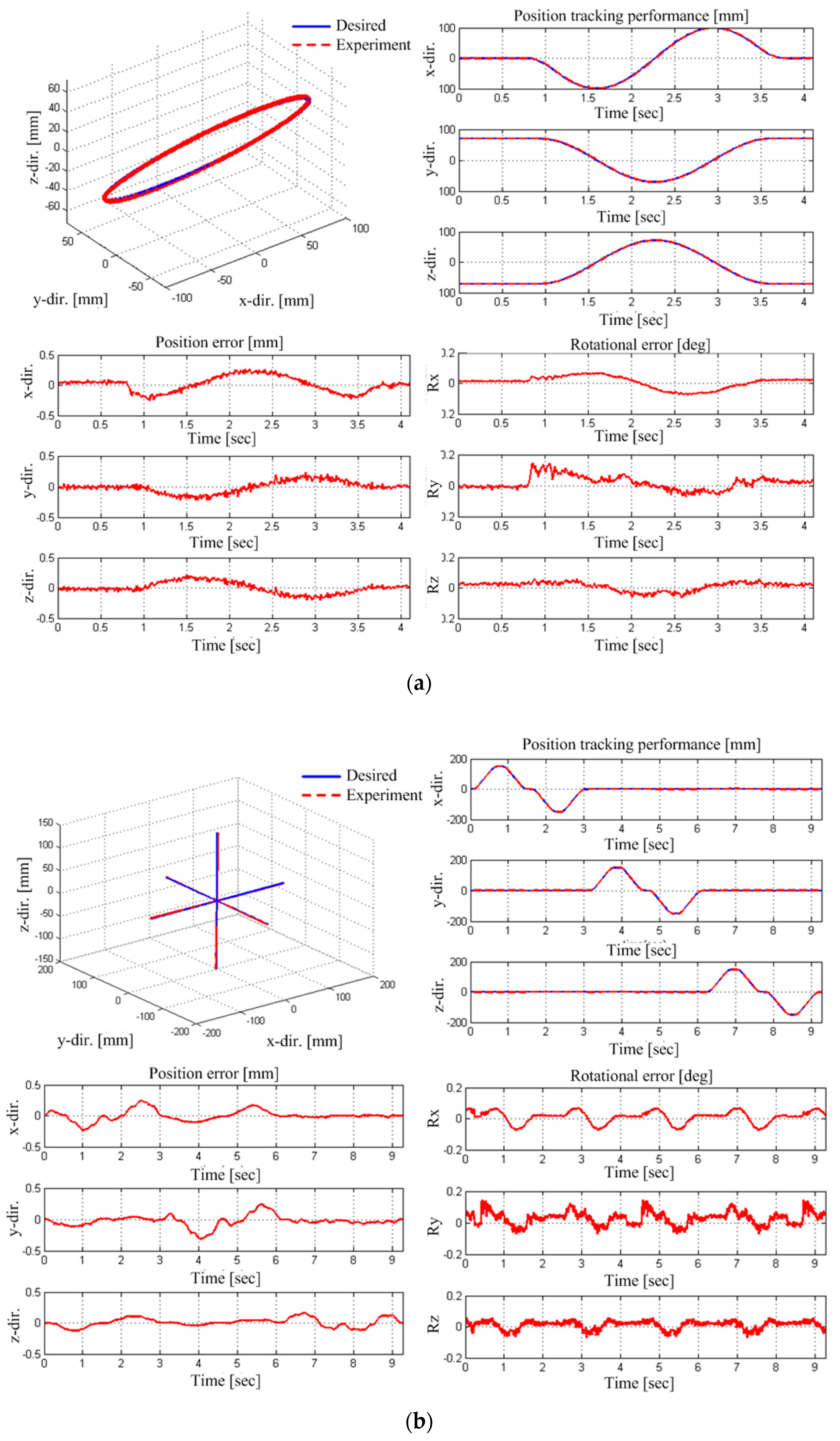
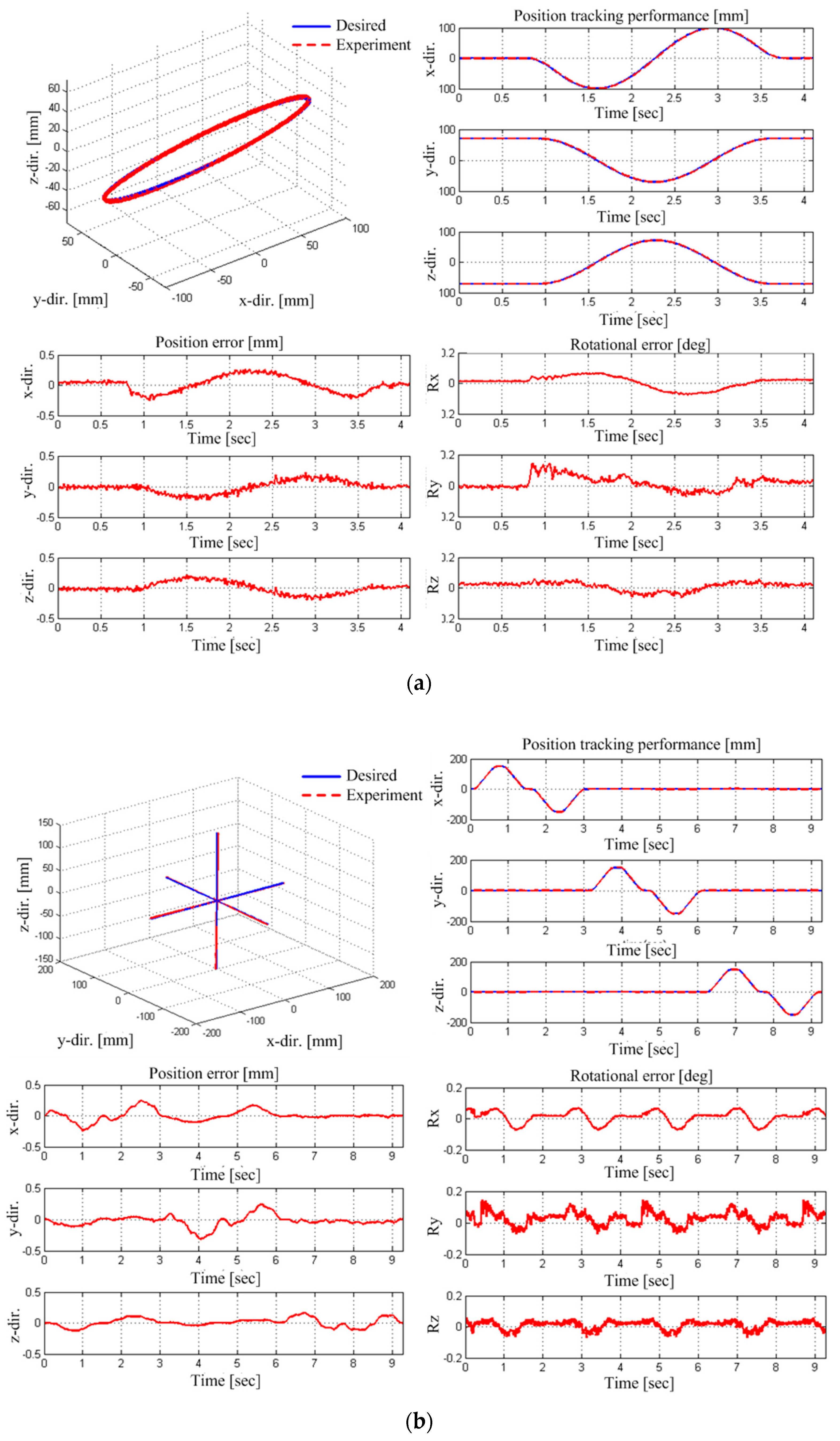
Figure 16 depicts the path accuracy results from the EE motion control; for a circular movement in (a) and for a linear movement in (b). The rotational angles references were set to zero to focus on the EE position control performance in both experiments. As results, the path accuracy is 1.284 mm and the path repeatability is 0.18 mm after calibration.
Although significant efforts are undertaken in the design, manufacturing, and assembly of the robots to build the robot accurately according to the design specifications, errors and uncertainties in the geometry of the robot are inevitable. Using costly procedures, the errors can be reduced but not eliminated. While machine parts such as drums, pulleys, and guidance systems can be manufactured with narrow tolerances by virtue of manufacturing technology advances, the setup of large machine frames still suffers from assembling errors. Thus, the improvement in the accuracy by calibration during the initial operation of the robot must be addressed. A detailed technical definition of the robot accuracy and measuring process are subject to ISO 9283, where a calibration is defined as the procedure to estimate the actual numerical values of the geometrical design parameters of the robot; the accuracy is shown as a key performance indicator for all kinds of robotic devices, and the position accuracy of a robot describes its ability to move its reference points to the desired absolute position in space. Regarding this, the experimental results show that the proposed calibration method could be a novel online geometry error compensation method to satisfy the industrial cable robot’s requirements and to improve the accuracy of the cable robot system.
7. Discussions and Conclusions
We present herein a geometry calibration methodology for a cable-driven parallel robot system utilizing a single commercially available laser distance sensor. To improve the accuracy of the calibration against structured and unstructured kinematic uncertainty, a polynomial polymer cable model, an extended pulley kinematics, and a cable robot kinematics were incorporated. Further, we suggested step-by-step procedures of the cable robot calibrations comprising five stages from the pre-calibration of the structured component in the cable robot system to the auto-calibration method for practical implementation in the real world.
The suggested methodology could overcome the uncertain kinematic parameters of the cable robot such as cable elongation and pulley inclusion error, and estimate the cable robot configuration by identifying the pulley position on the cable robot frame. The simulation and experimental results conducted on the MINI cable robot system could verify the performance of the proposed calibration methods. Considering the cable robot application with a large workspace and a frame size, the suggested method has the potential to overcome the unstructured and structured uncertainties in the cable robot kinematics, especially for spatial pulley position estimation that is essential for computing the forward and inverse kinematics of the cable robot.
Compared to the previous cable robot calibration method that incorporates multimodal measurements from expensive sensors, we could achieve inexpensive and convenient but accurate methods to calibrate the cable robot by a model-based approach composed of kinematic parameters and experimental-data-driven mathematical models. In this study, we proved that even with insufficient sensor measurements for the cable robot calibration, the mathematical modeling of the unknown parts and the experimental data could overcome the insufficient sensor measurements. Moreover, the error modeling of the sensors will improve the accuracy of the cable robot calibration [
25]. In comparison with the vision camera and image processing based calibration methods, the suggested method has benefits of inexpensive cost, applicability to a large size cable robot system, and relatively ease calibration procedure with real-time computation. However, since the calibration result depends on the laser distance sensor performance and mathematic models derived from the experiments, the robustness problem comes from un-modeled elements may arise during the long-term operation. The proposed methodology has a potential to be applicable to a different configuration cable robot, but the kinematics and the dynamic force distribution equation needs to be appropriately modified to the respective cable robot system.
In our future works, more sophisticated modeling of the uncertain components of the cable robot system, such as the strict cable deformation and elongation modeling and the pulley friction and dynamic effects on the cable, will be studied to improve the robot EE position and posture control performance as well as long-term calibration free operating. Also, the quantification analysis and sensitivity analysis between the laser distance sensor accuracy and the cable robot calibration performance will be accomplished to provide a sensor selection guideline for the real-world application of the proposed methods.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}