A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments


Abstract
:1. Introduction
2. The Theoretical Basis of Tightly-Coupled INS/RTK Integrations
2.1. Definition of State Vectors and Motion Model
2.2. Observation Model
2.3. Conventional Tightly Coupled RTK/INS Integrations with AR in the Ambiguity Domain
3. The Implementation of the Novel ARPD-RTK/INS Algorithm
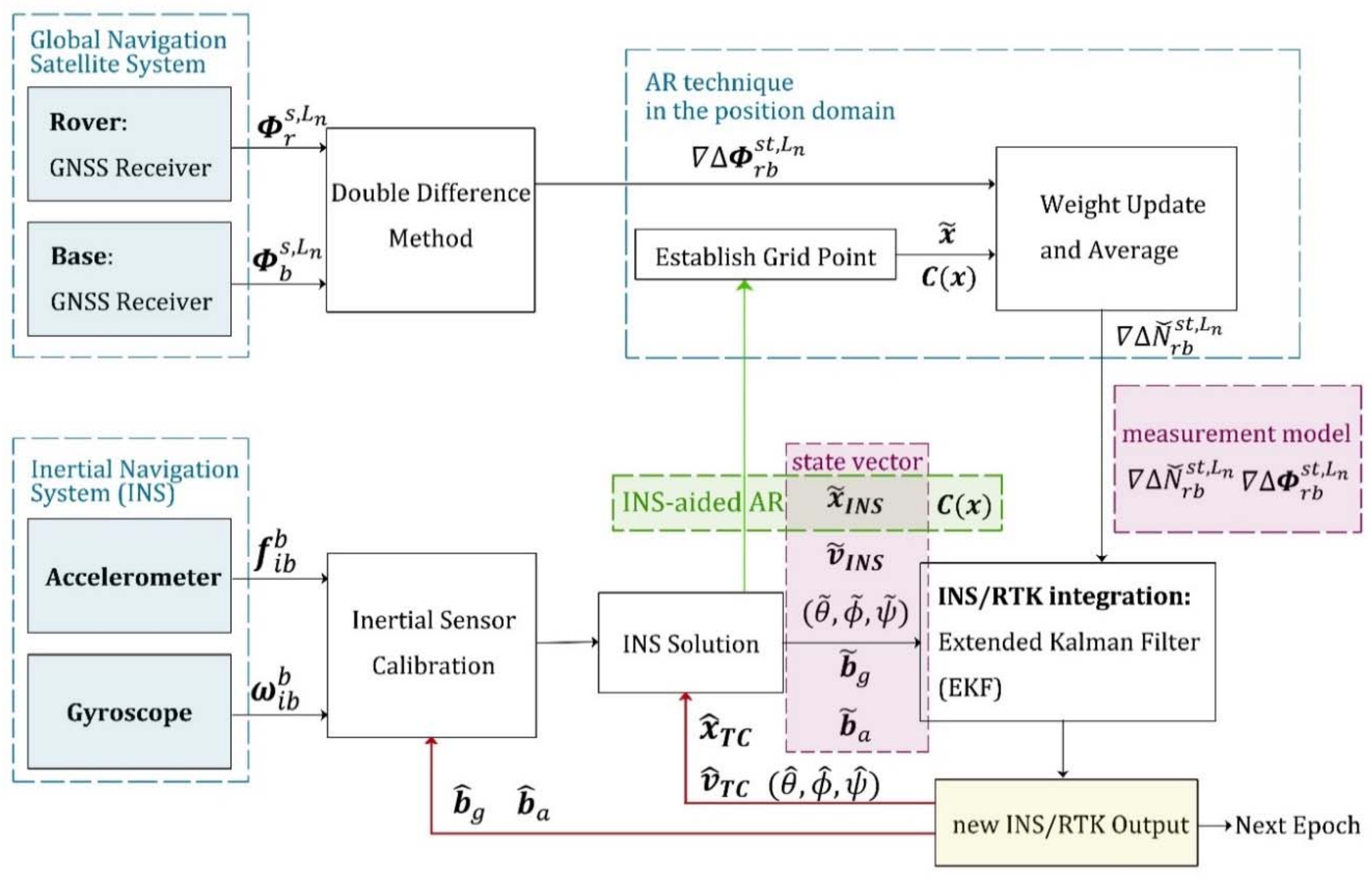
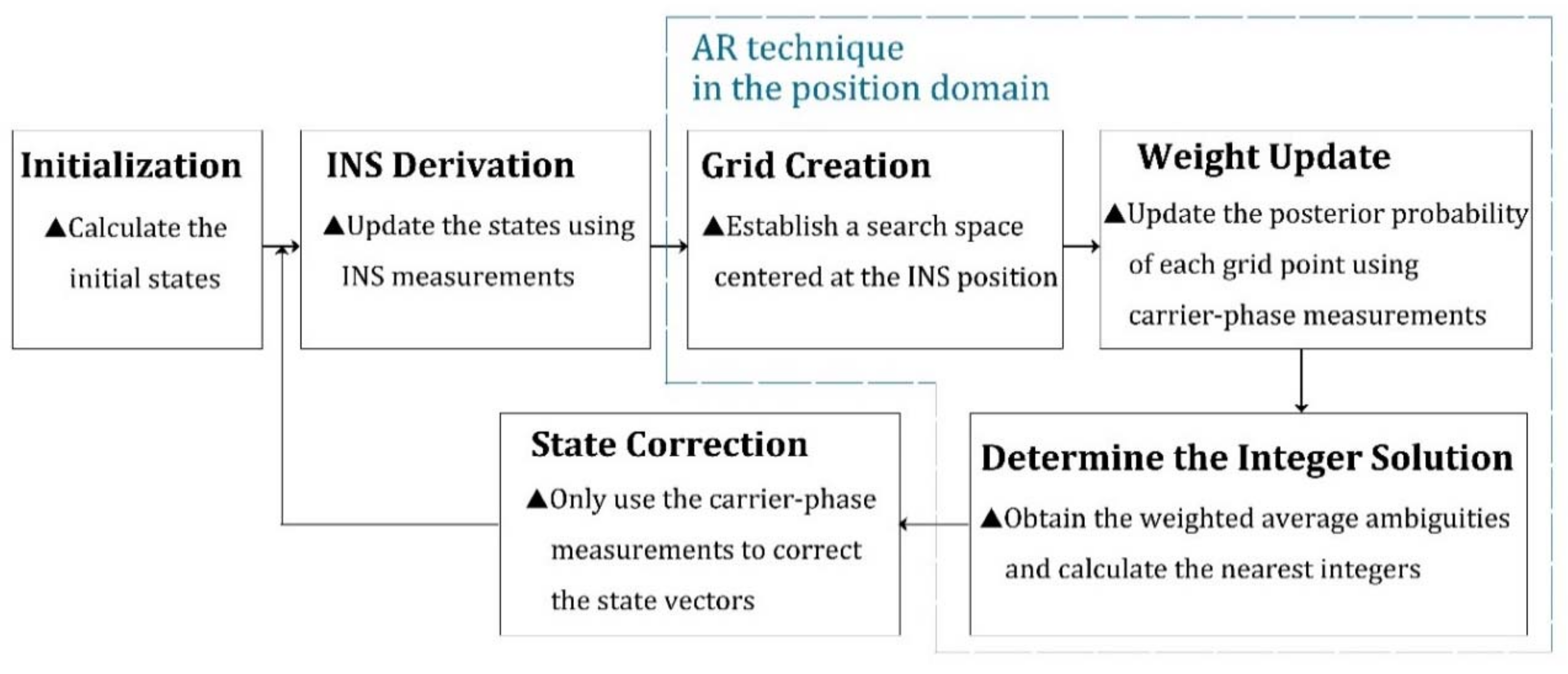
3.1. Overall Flow Chart of the ARPD-RTK/INS Algorithm
3.2. State Initialization
3.3. INS Derivation
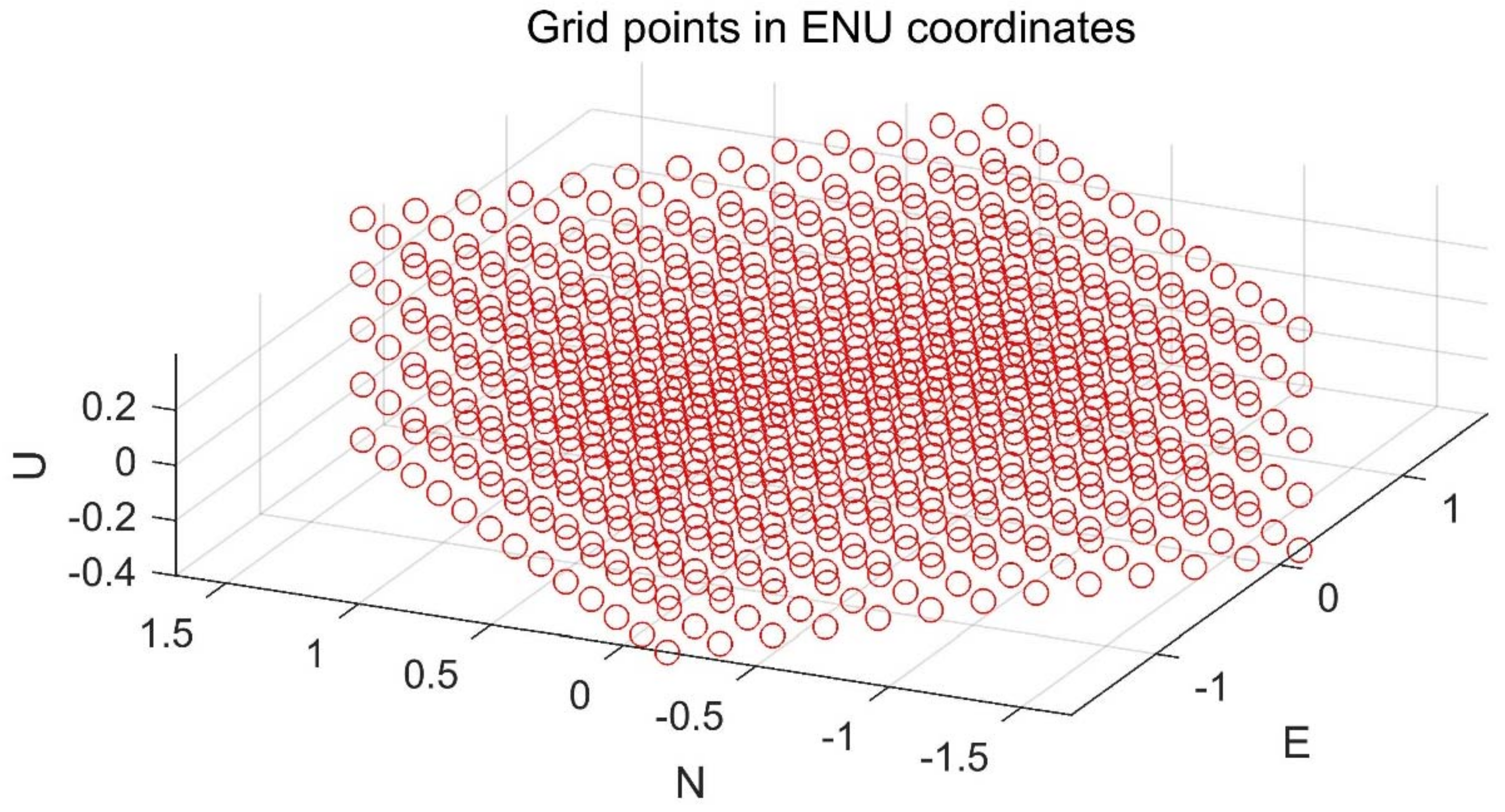
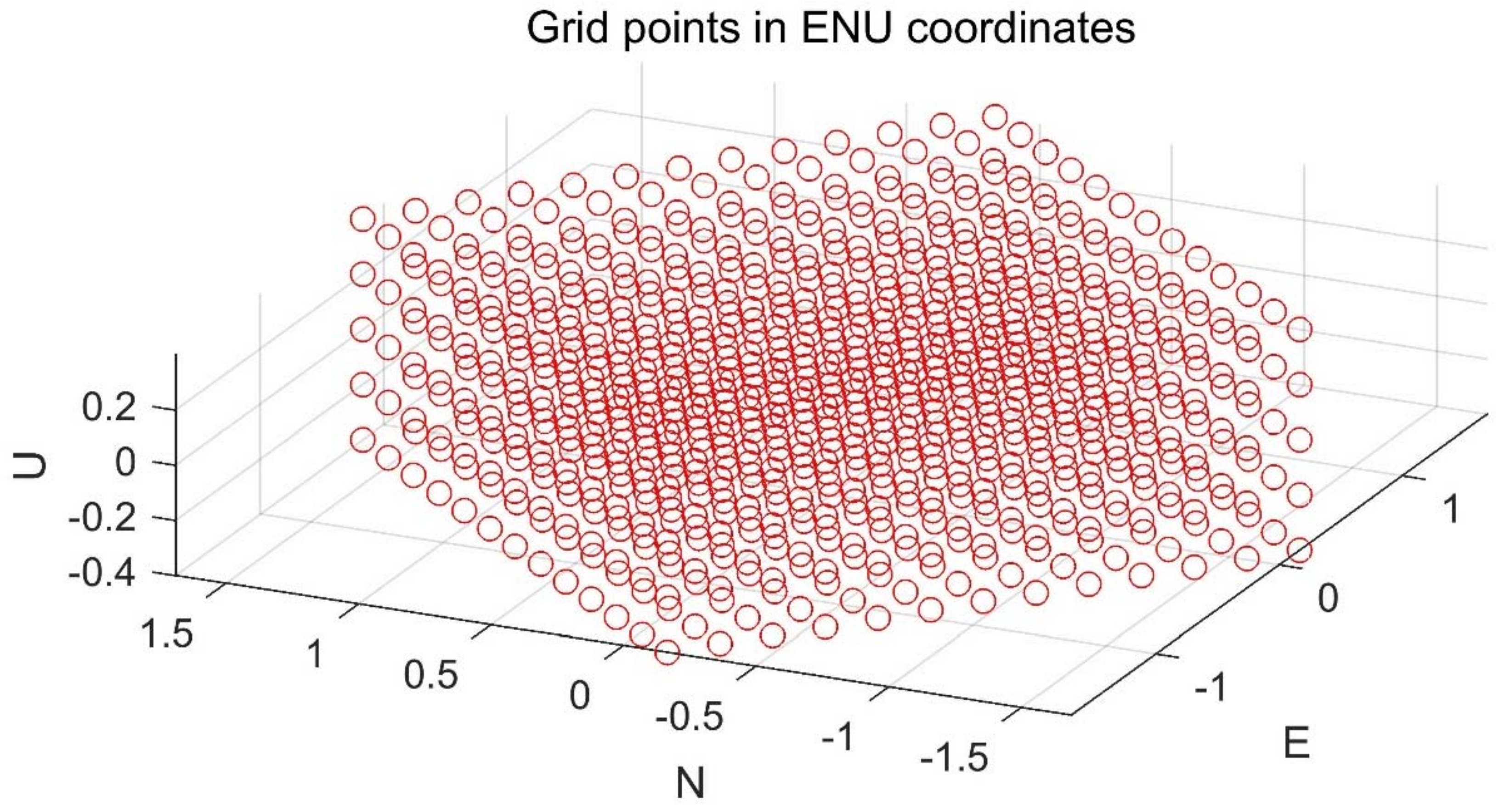
3.4. Grid Creation
3.5. Weight Update
3.6. Determine the Integer Solution and the Correction Step
4. Experimental Results and Discussion
- 1.
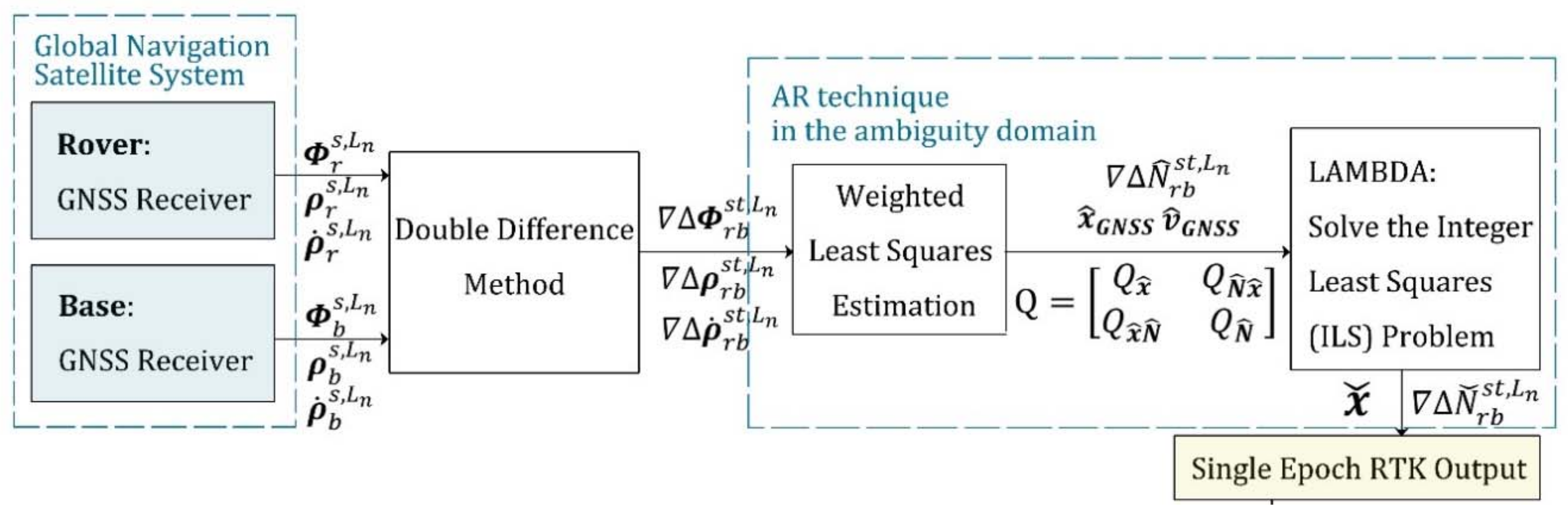
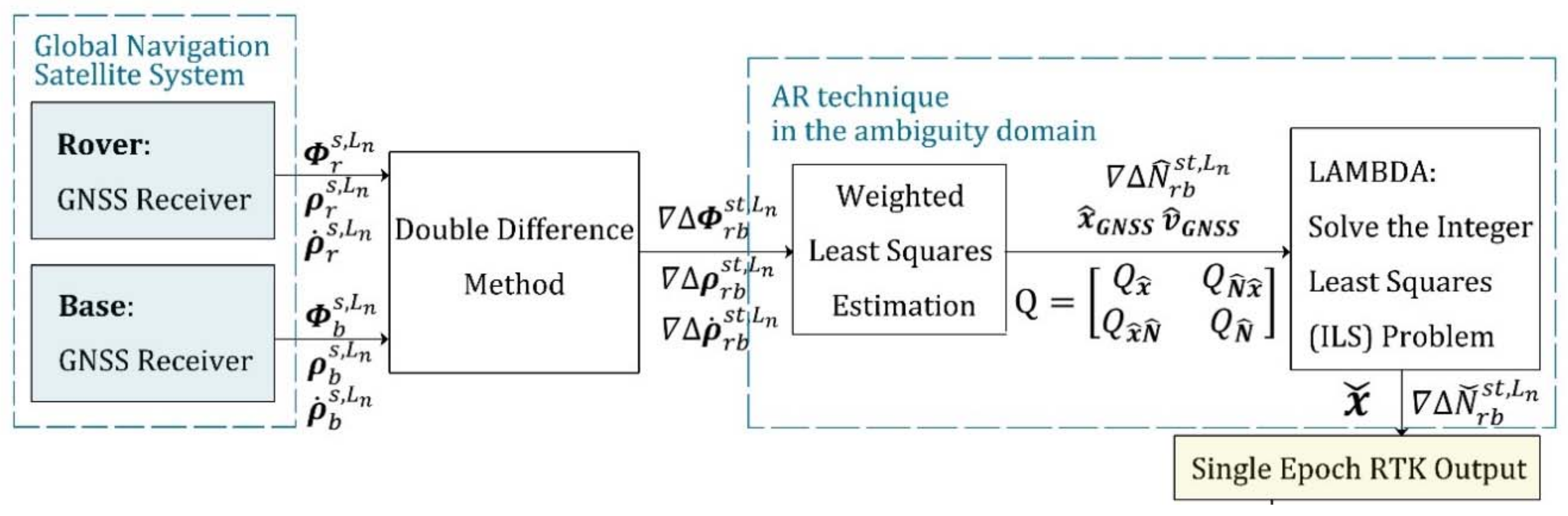
- Single-epoch RTK: Only the current satellite observations are utilized to perform an integer ambiguity resolution at each epoch. The AR technique that we use here is the LAMBDA method. The detailed implementation is depicted in Figure 4.
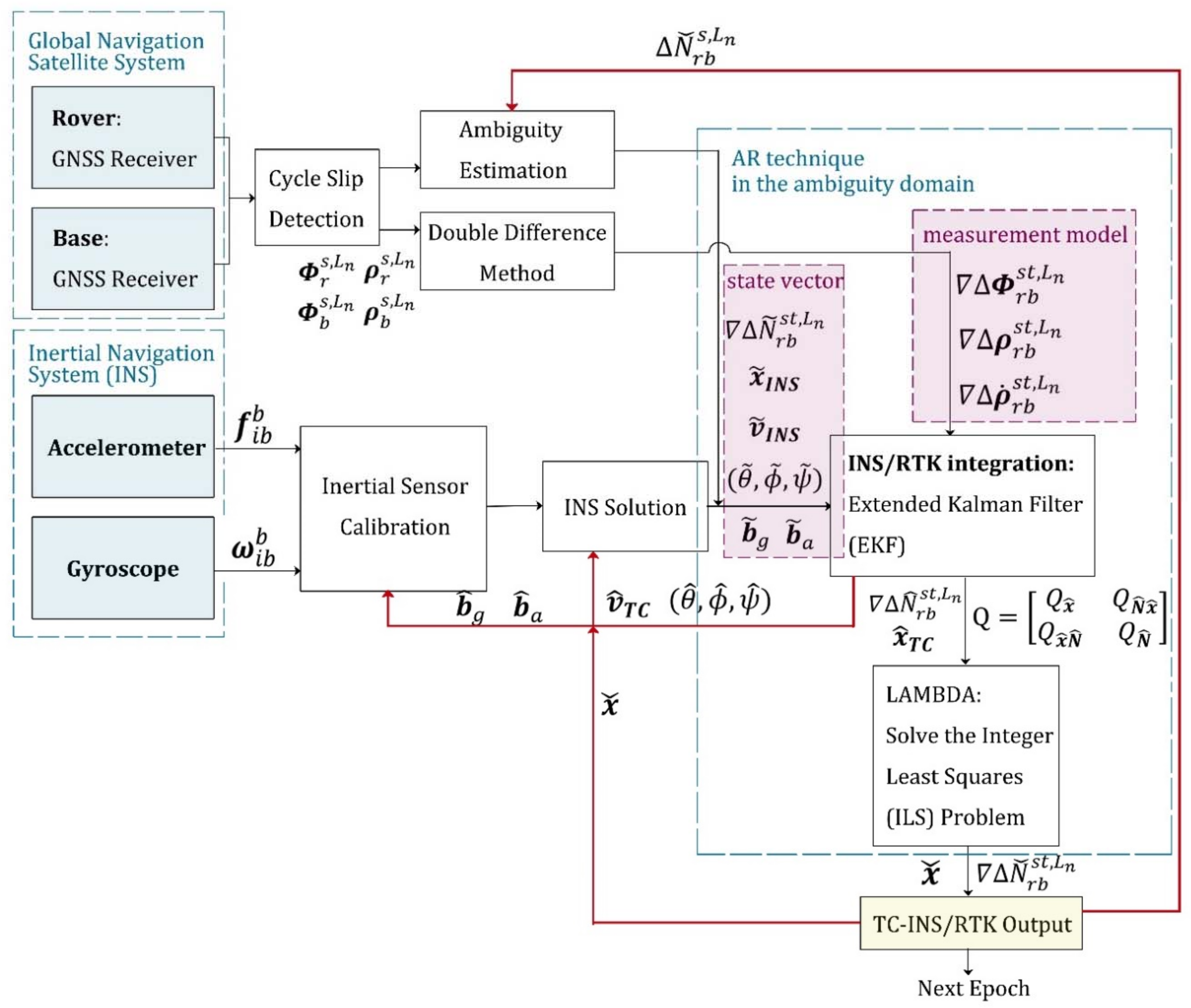
- 2.
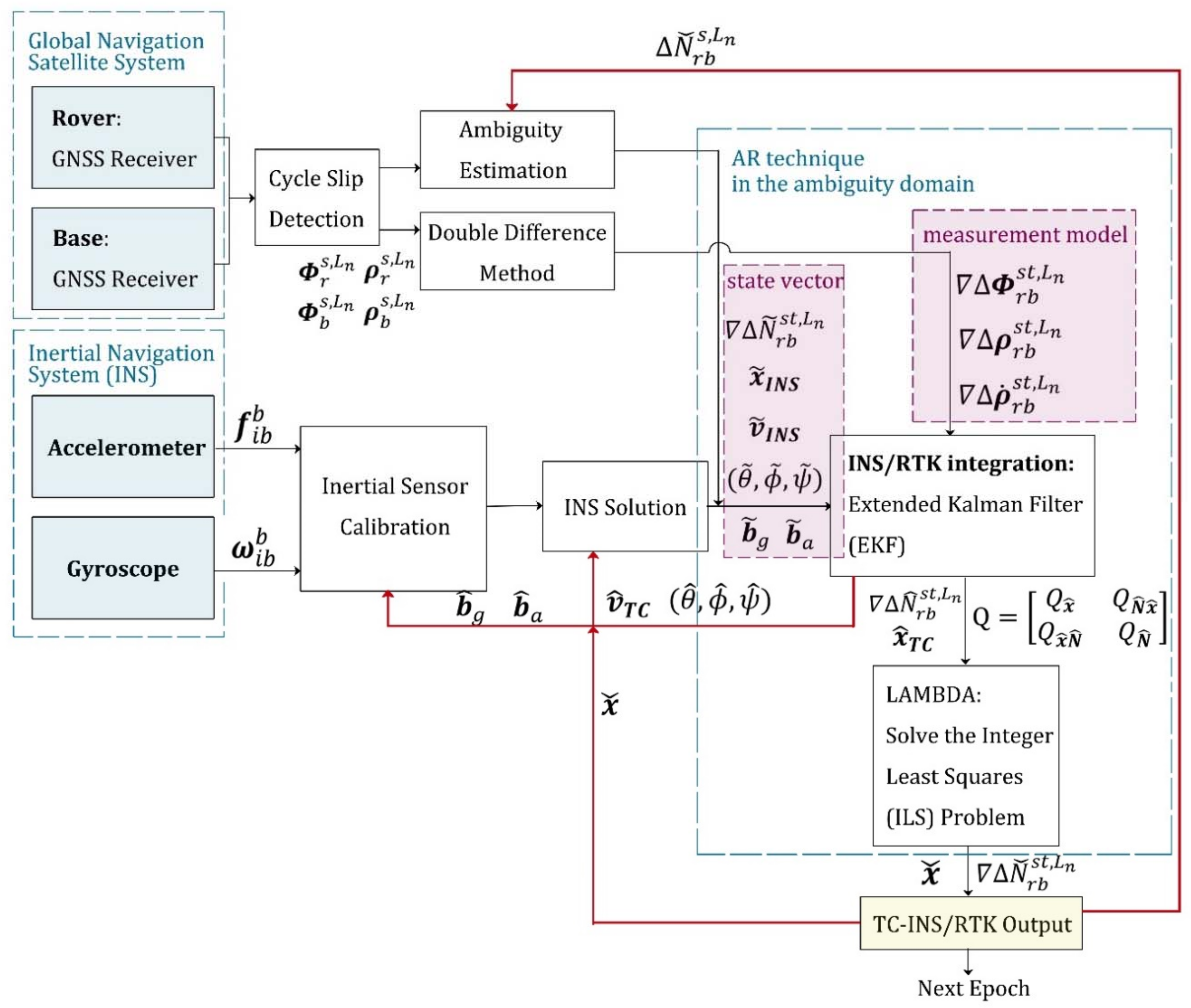
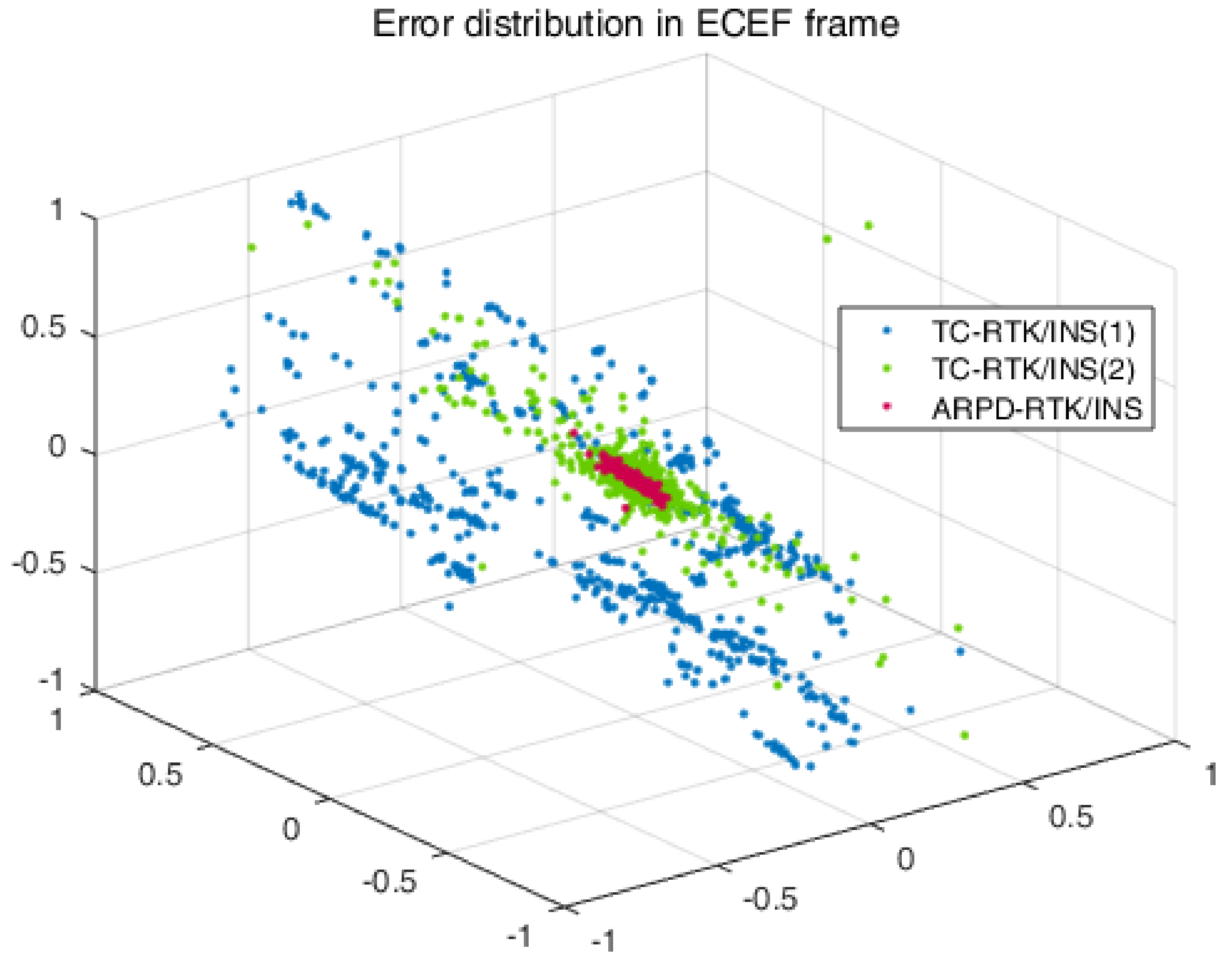
- The first kind of tightly coupled RTK/INS integration: Raw carrier-phase measurements, pseudorange measurements, and inertial information are fused to estimate the float ambiguities using EKF. Then, the integer solution is searched for in the ambiguity domain. The Kalman filter states contain position, velocity, attitude, the biases of inertial sensors, and float ambiguities. The detailed implementation is depicted in Figure 1. In this section, this algorithm is abbreviated as “TC-RTK/INS (1)”.
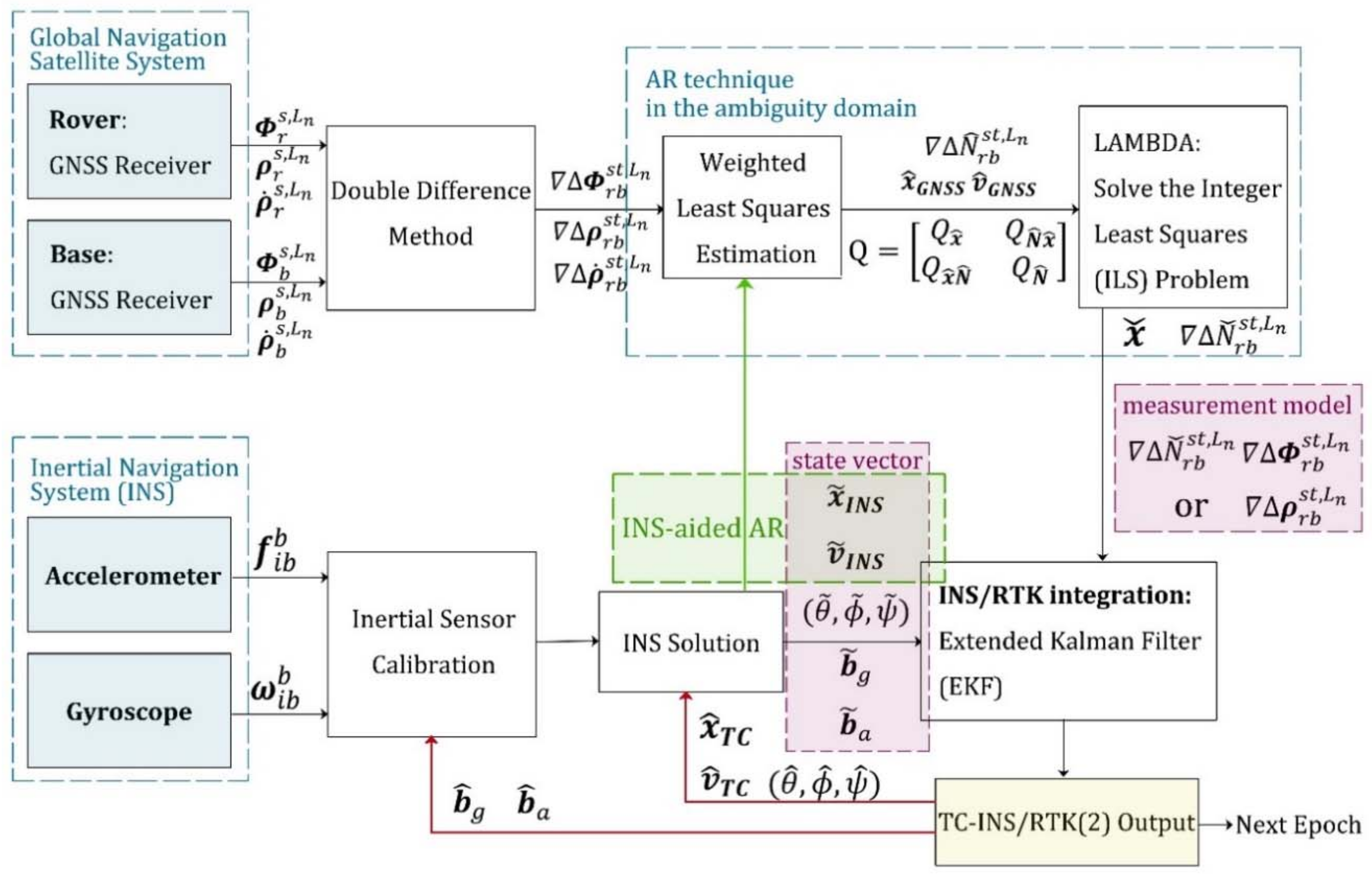
- 3.
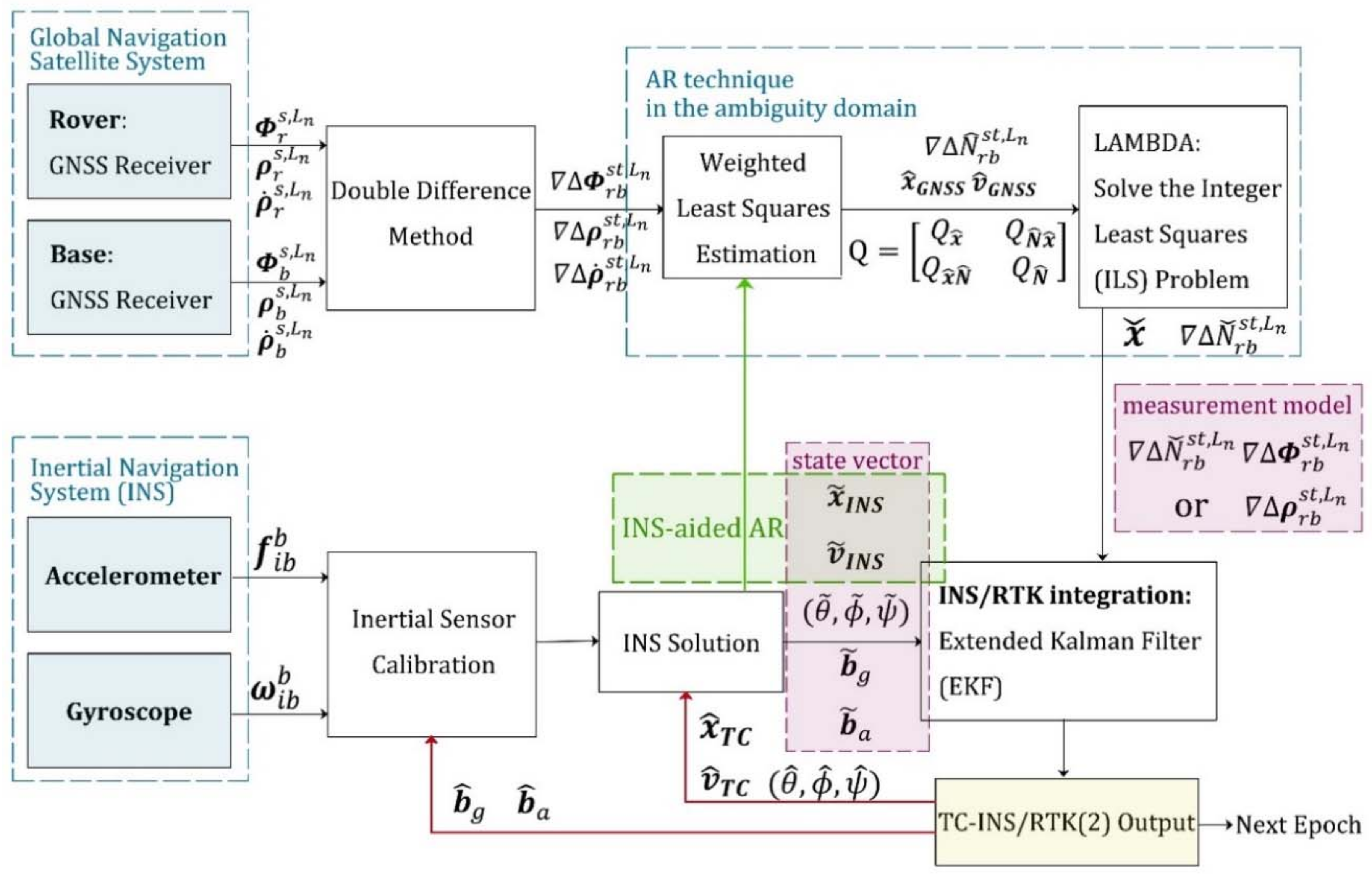
- The second kind of tightly coupled RTK/INS integration: Least-Squares (LS) estimation is used to obtain the float ambiguities. In order to solve this LS problem, not only pseudorange and carrier-phase measurements, but also the position provided by the INS are utilized as constraints. The detailed implementation is depicted in Figure 2. In this section, this algorithm is abbreviated as “TC-RTK/INS (2)”.
- 4.
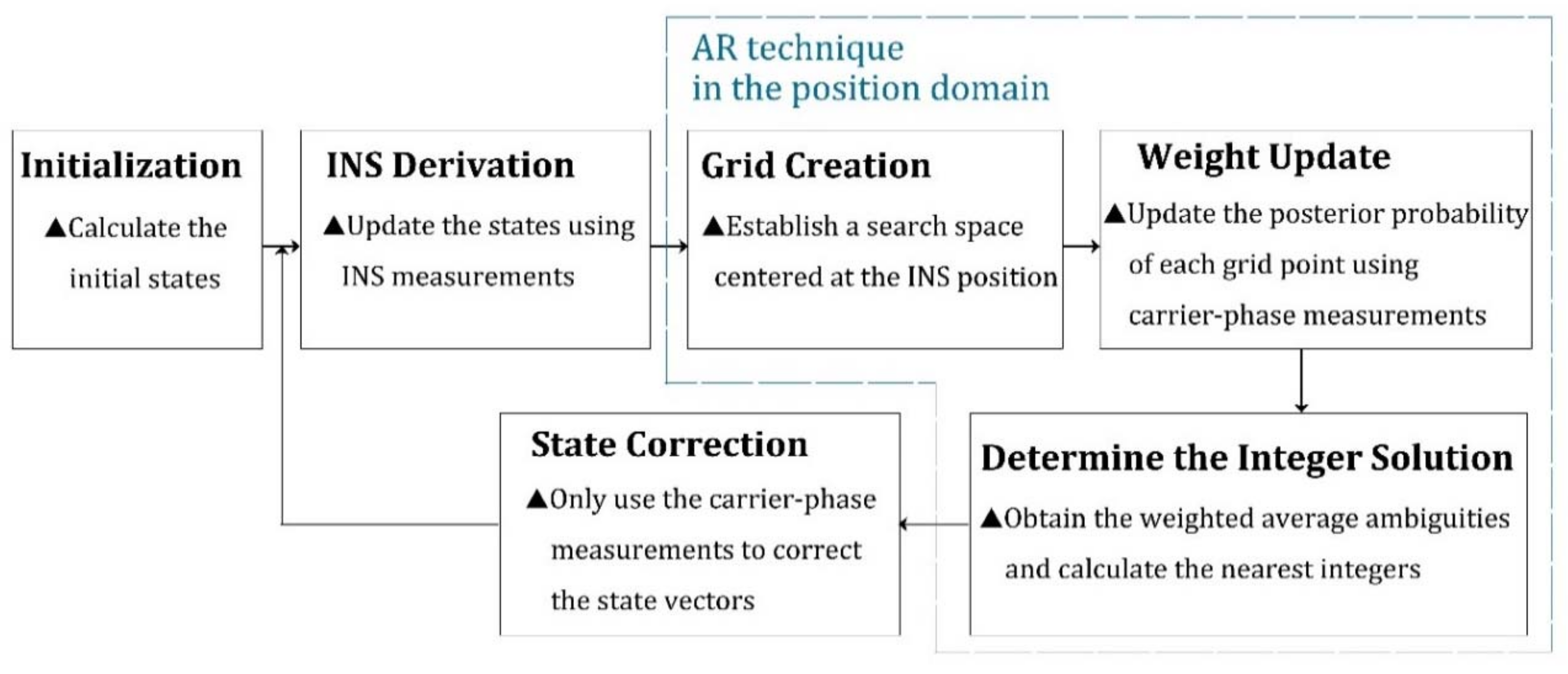
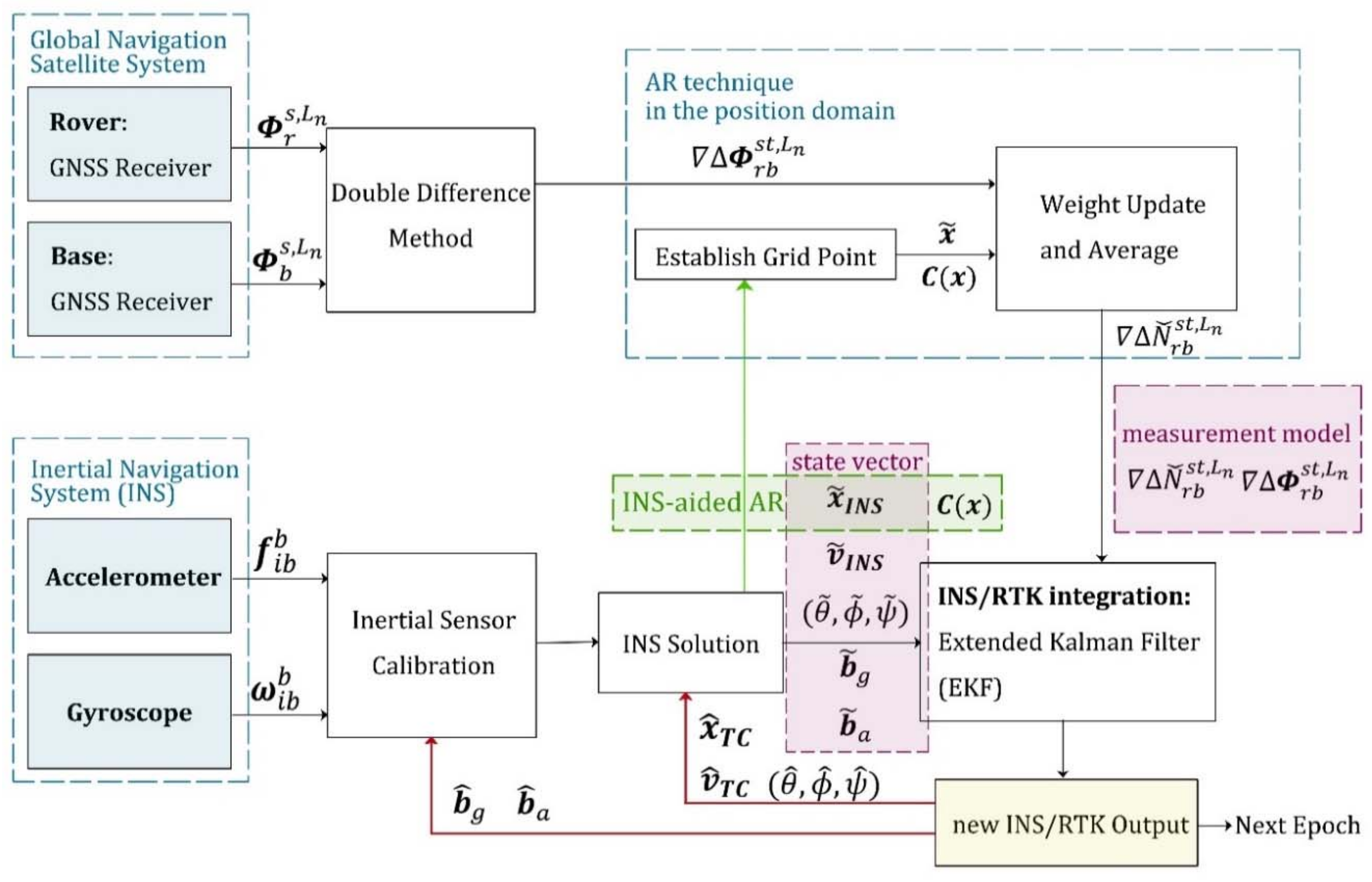
- The proposed ARPD-RTK/INS algorithm: Different from the above three positioning methods, the new algorithm obtains the integer ambiguity solution by searching in the position domain, which is not affected by the quality of pseudorange measurements. The detailed implementation is depicted in Figure 6.
4.1. Experiments on Simulation Datasets
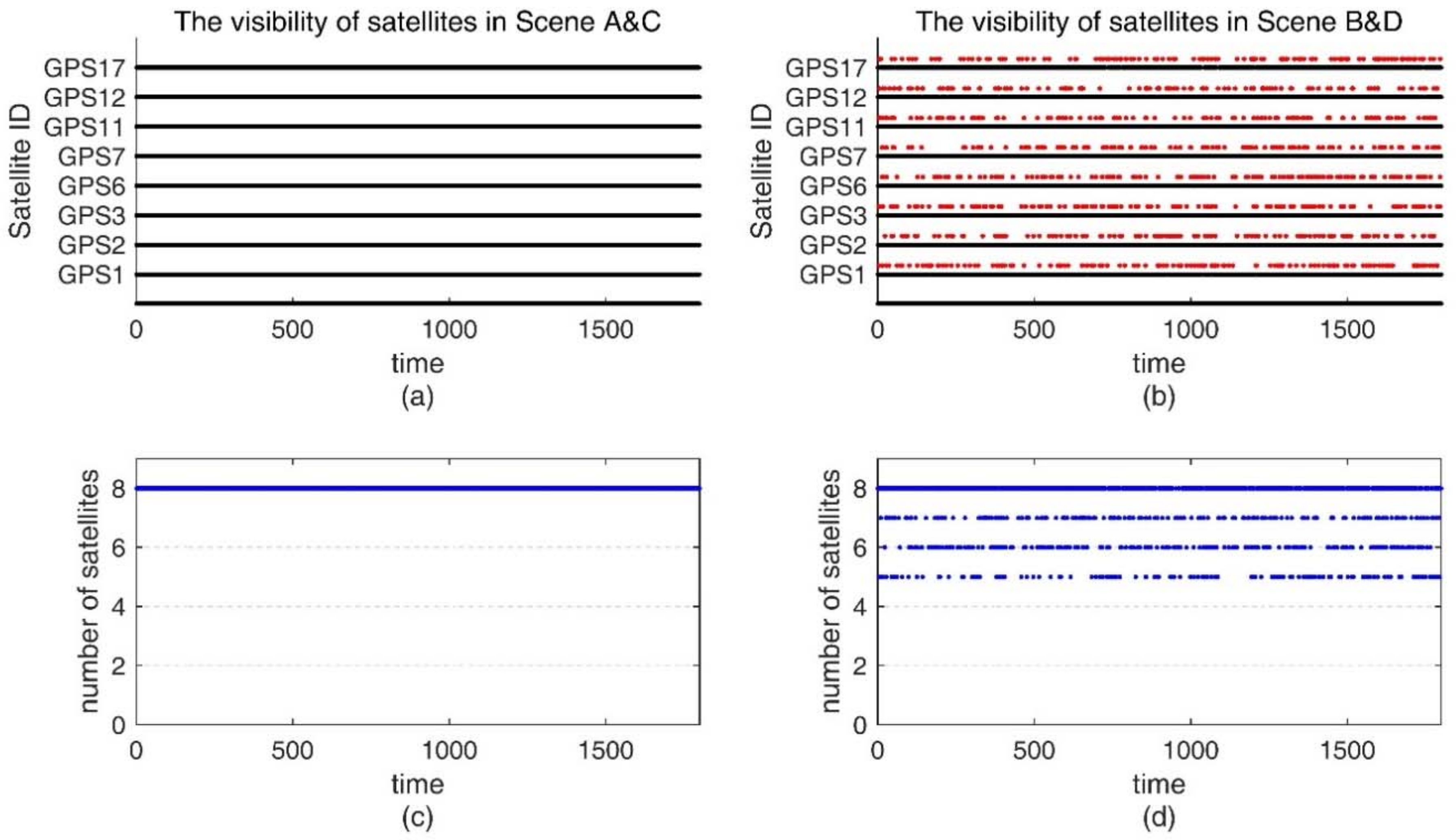
- Scene A: Control group. From 0 s to 1800 s, there are sufficient satellite measurements with no cycle slips occurring.
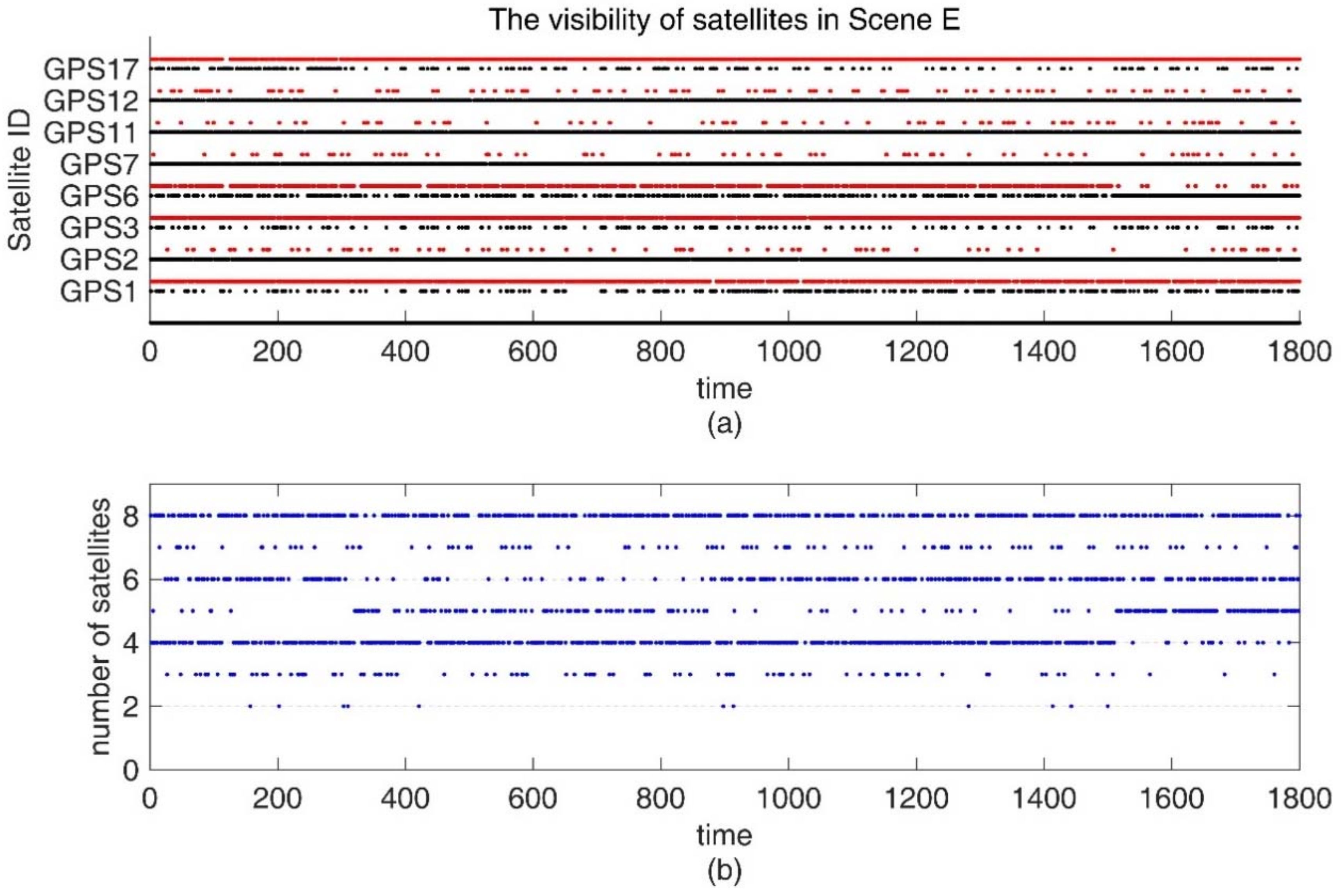
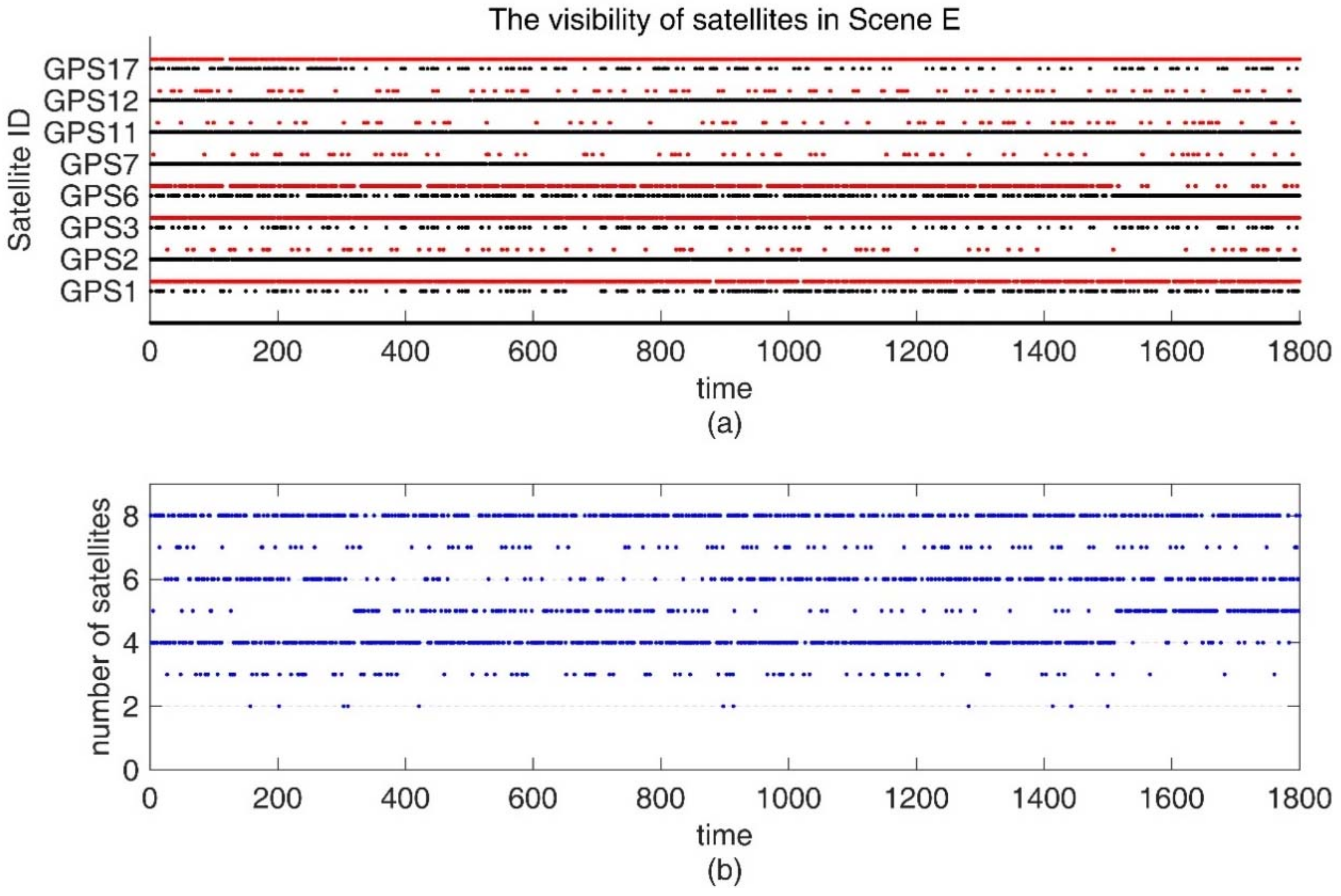
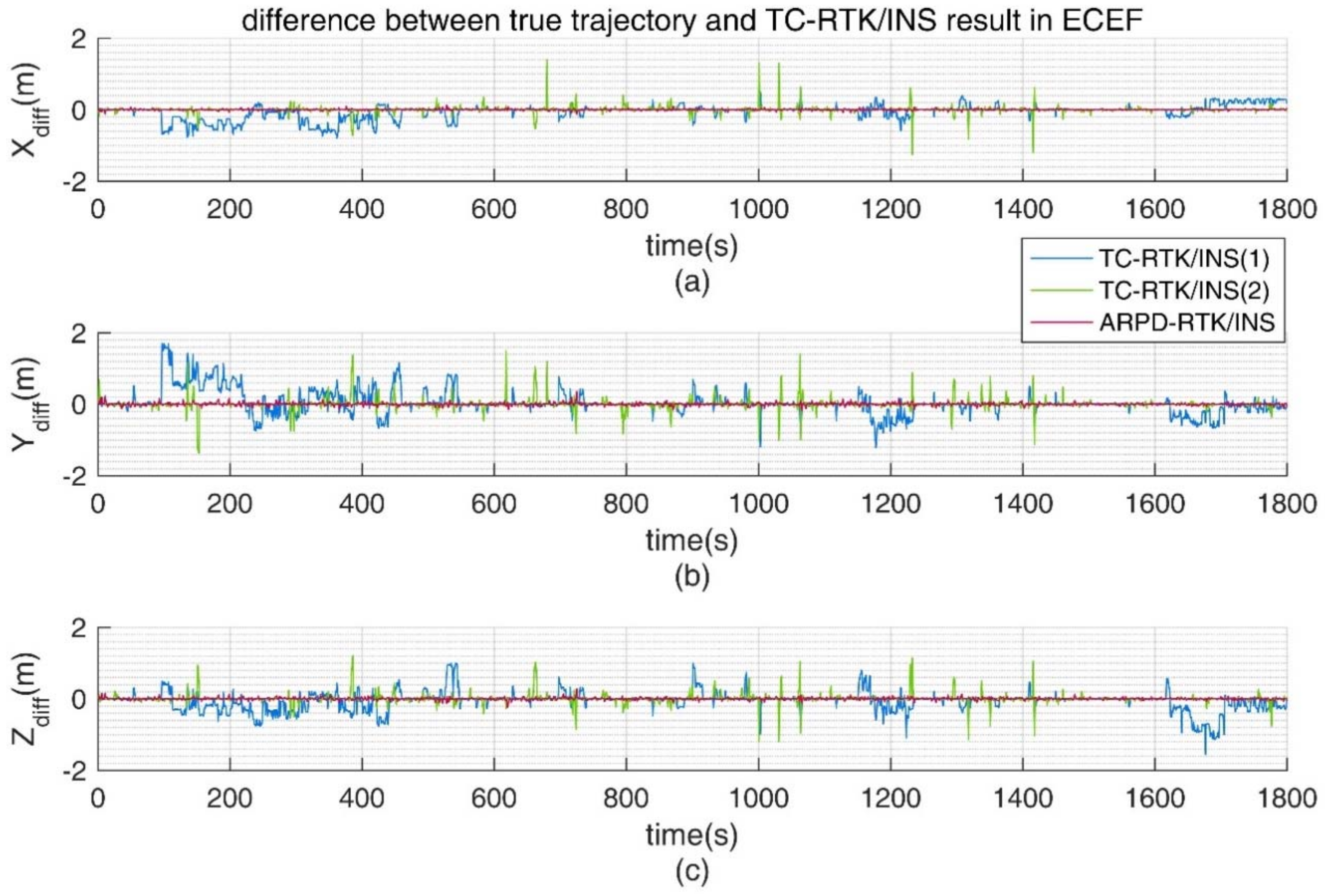
- Scene B: Experimental group. From 0 s to 1800 s, the total number of satellites in view is more than four, but there exist frequent changes in satellite visibility.
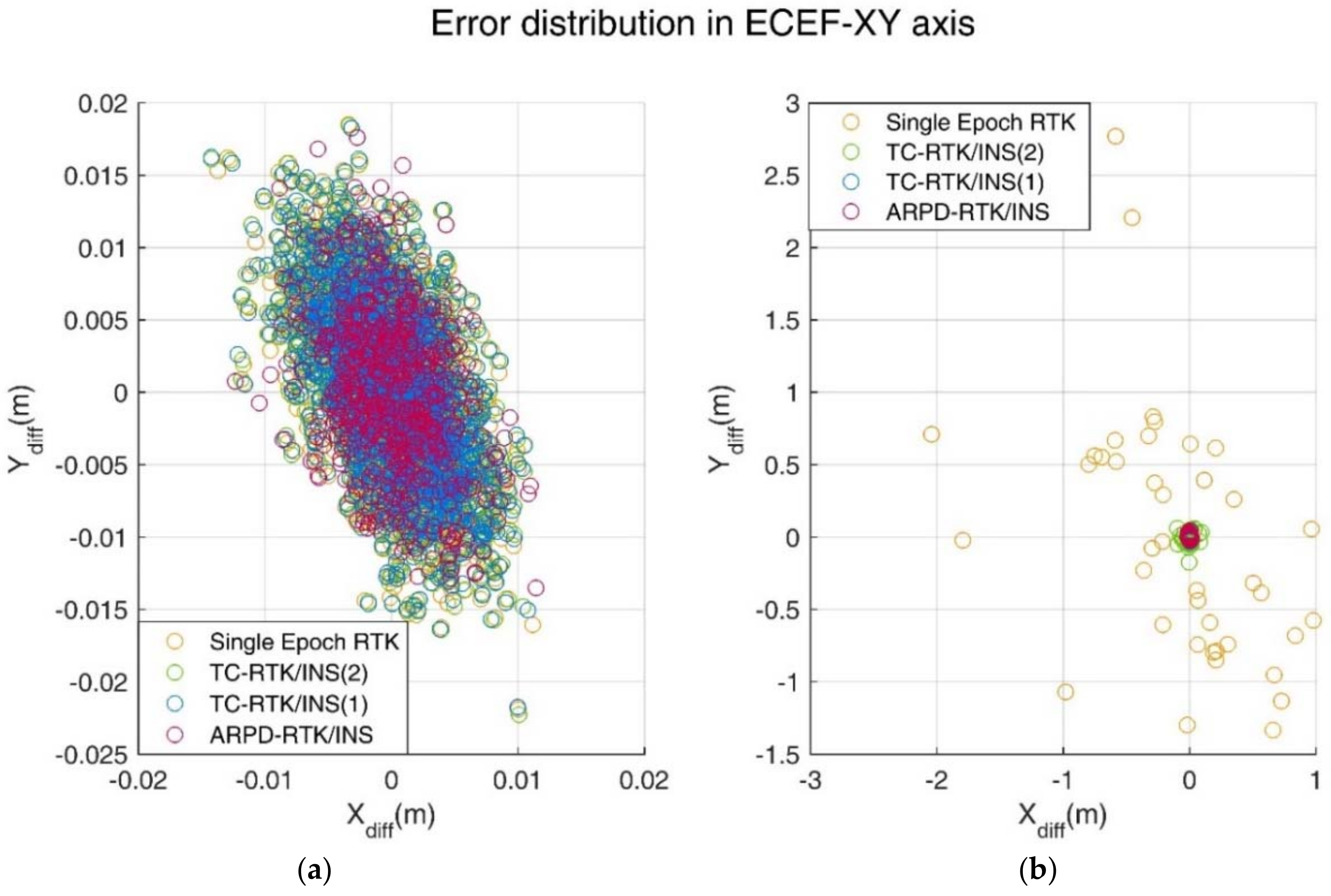
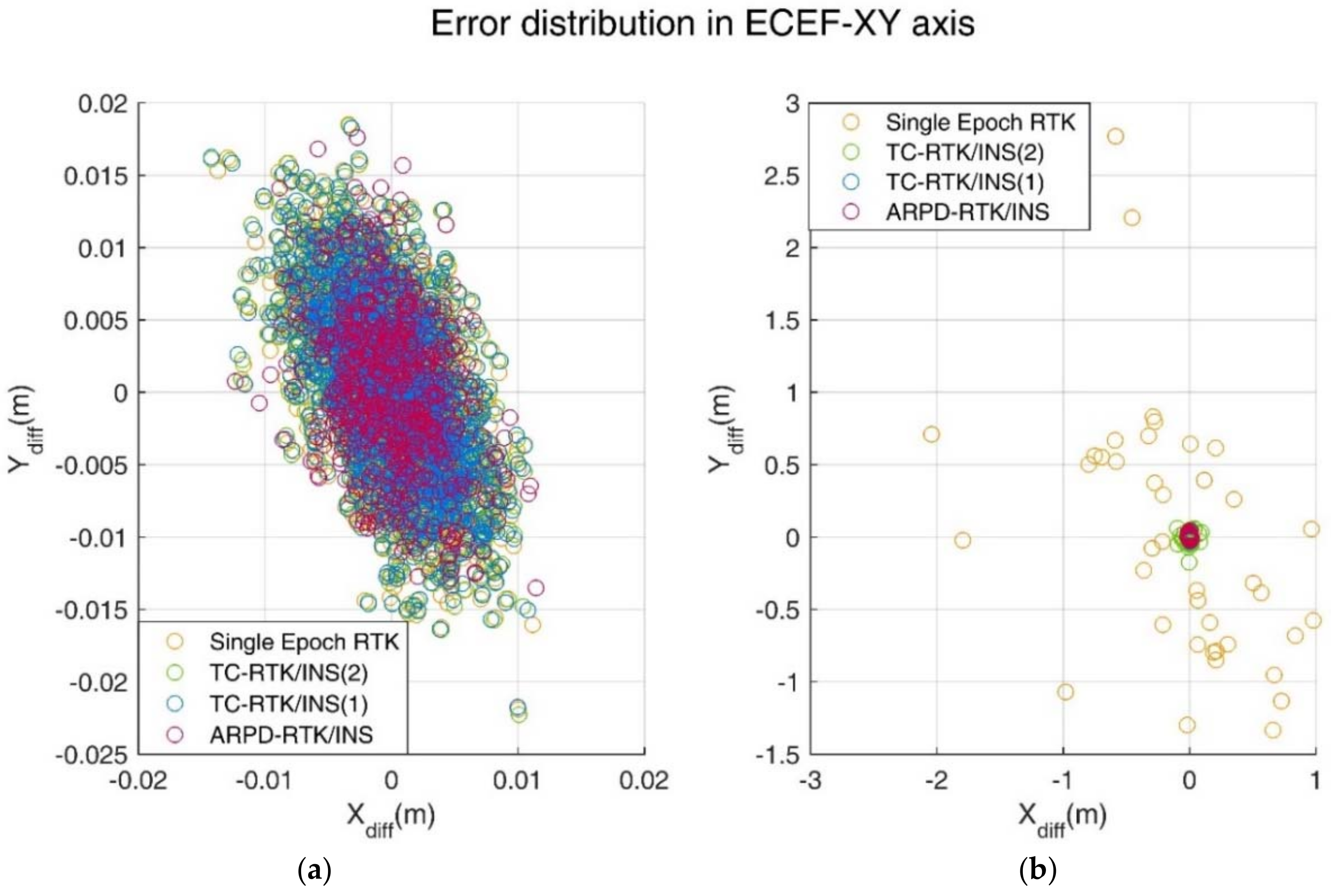
- By comparing the positioning results of the four methods under Scene A, we can find that a similar performance can be obtained by four different methods when under good satellite observation conditions. The maximum position error is about 3 cm, which meets the desired high-precision requirement.
- The number of available satellites plays an important role in the accuracy of the positioning algorithm. Comparing the single epoch RTK results in Scene A and Scene B, it is found that the fix rate decreases as the number of satellites decreases. Even if additional inertial information is considered in the AR process, such as the TC-RTK/INS (2) algorithm, the final fix rate is also affected by the number of visible satellites. For the other two algorithms that do not involve the fix rate change, the overall accuracy also slightly degraded due to a reduction in the number of satellites.
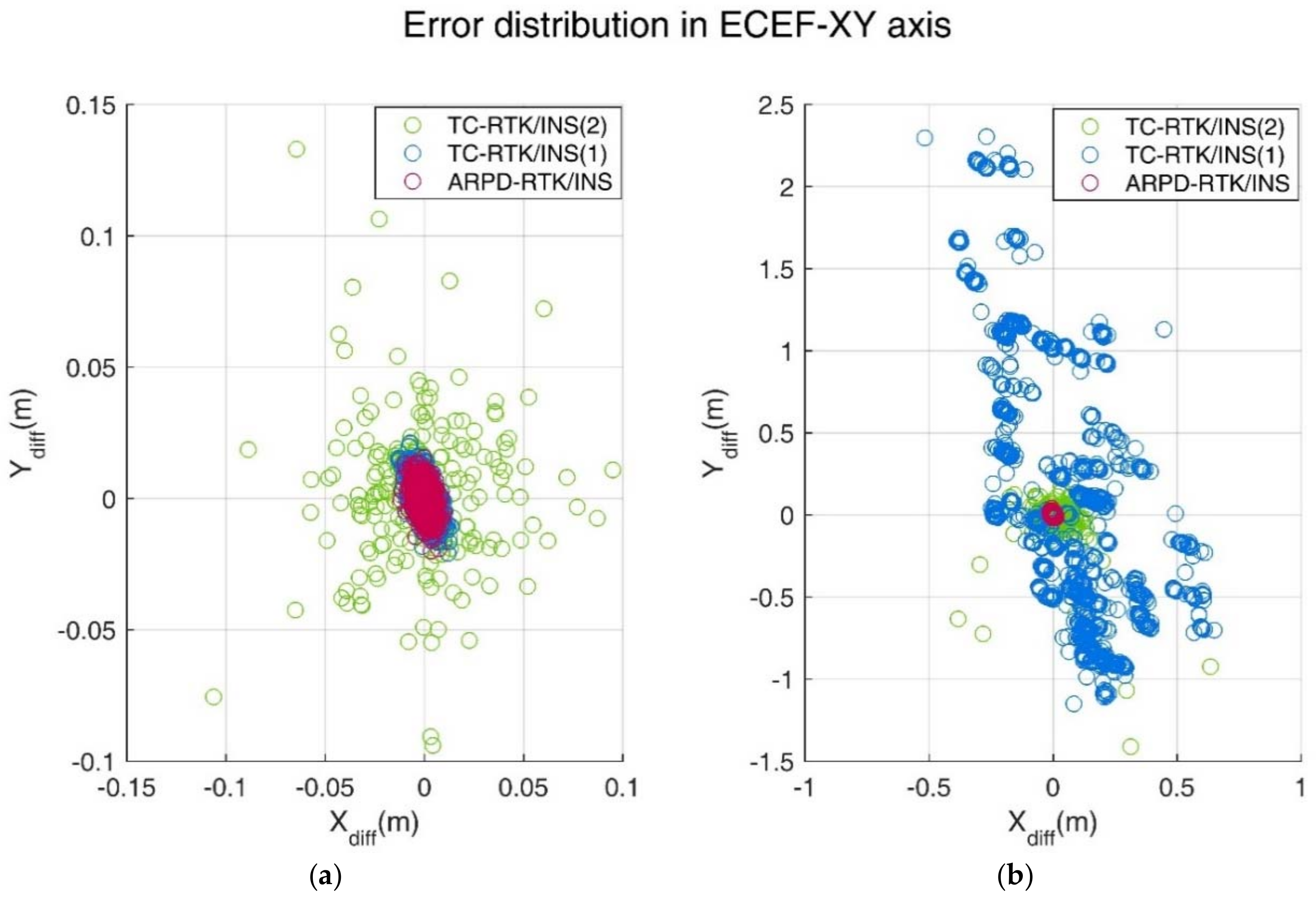
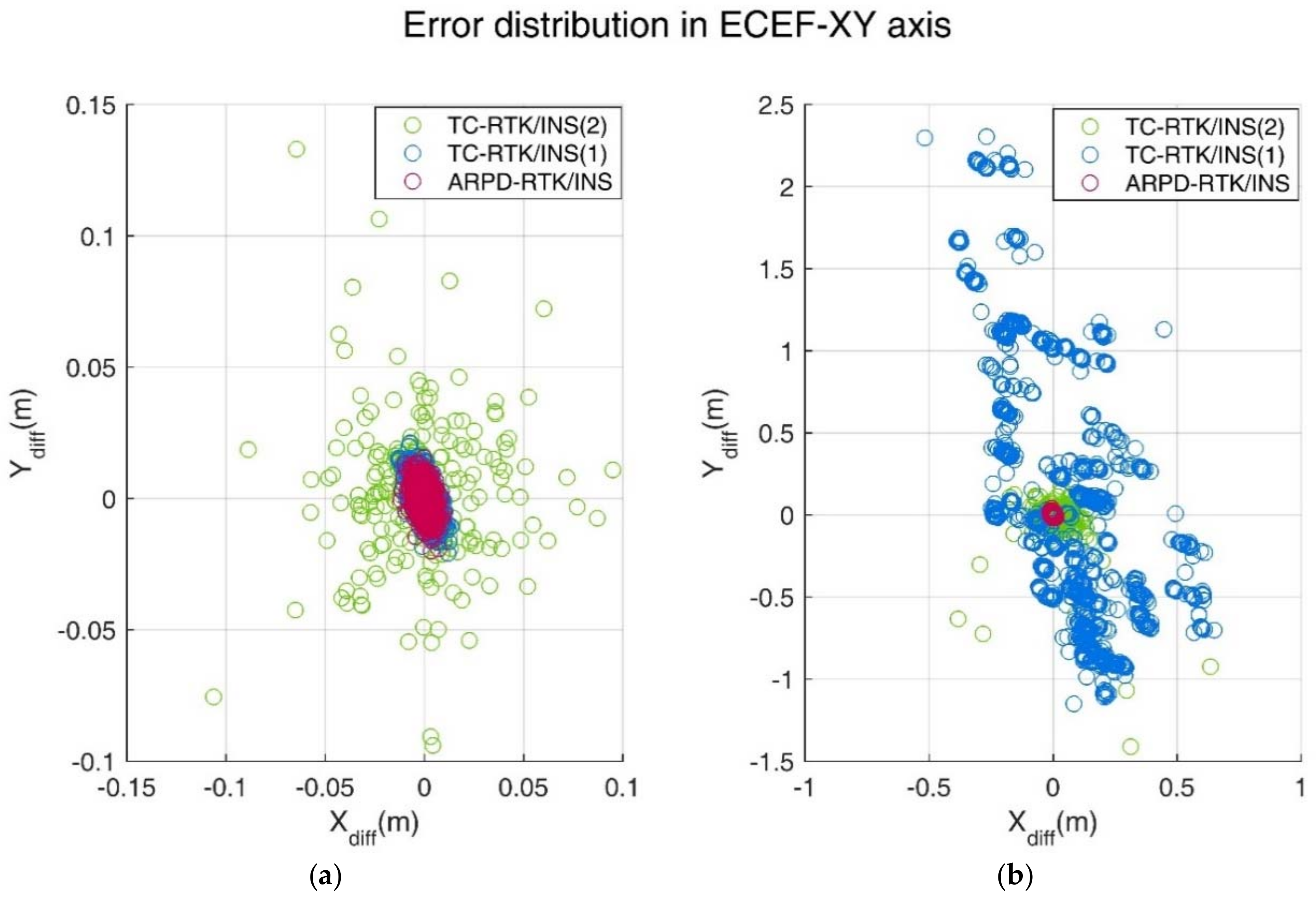
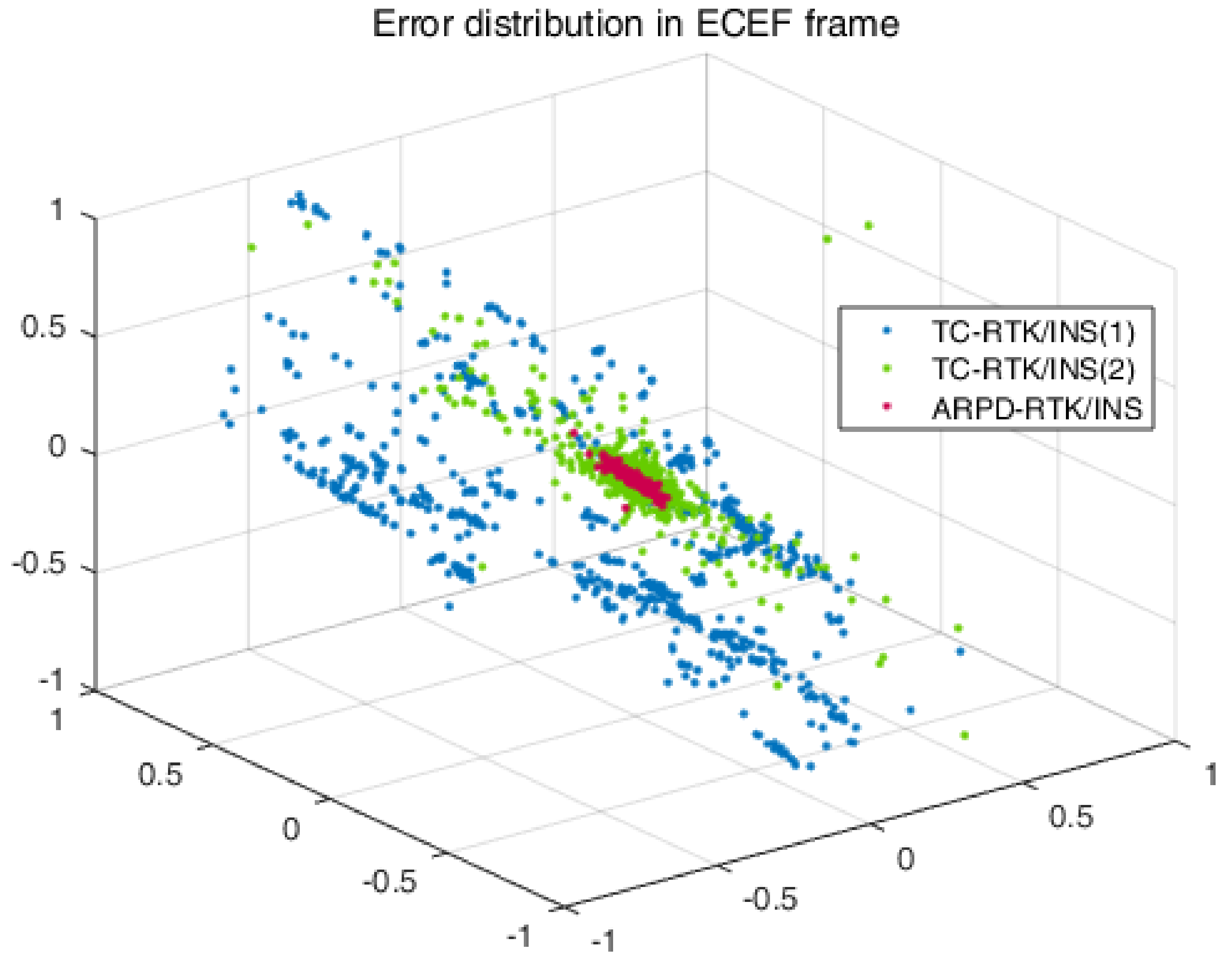
- Comparing the performance of the four algorithms in Scene B, methods 1 and 3 both show that the fix solution cannot be obtained all of the time. It can be seen that the AR process with INS-aiding has a higher fix rate than the single-epoch RTK. When the AR process failed, the positioning accuracy will be degraded, which depends on the quality of the pseudorange observation. Since we assume that all of the cycle slips can be detected before the positioning algorithm is performed, even in the scene where the satellite observability frequently changes, the TC-RTK/INS (1) algorithm will not be influenced by the wrong ambiguity and remain the ideal positioning accuracy. The reason why the ARPD-RTK/INS and TC-RTK/INS (1) algorithm perform better than the other two algorithms is that the position predicted by the INS measurement is more accurate than the position derived from the pseudorange estimation, so that a more effective ambiguity search region can be obtained.
4.2. Real Experimentation
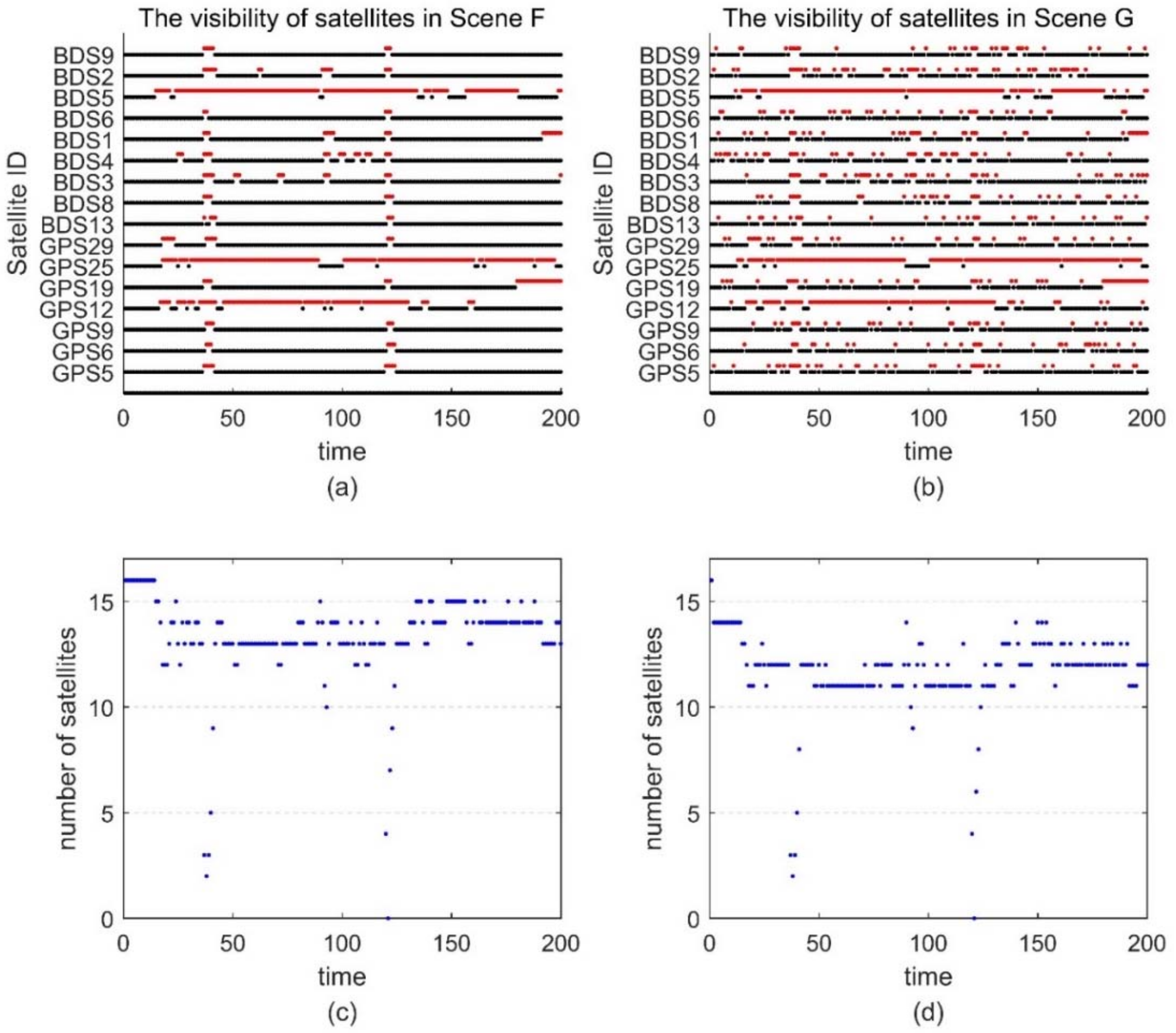
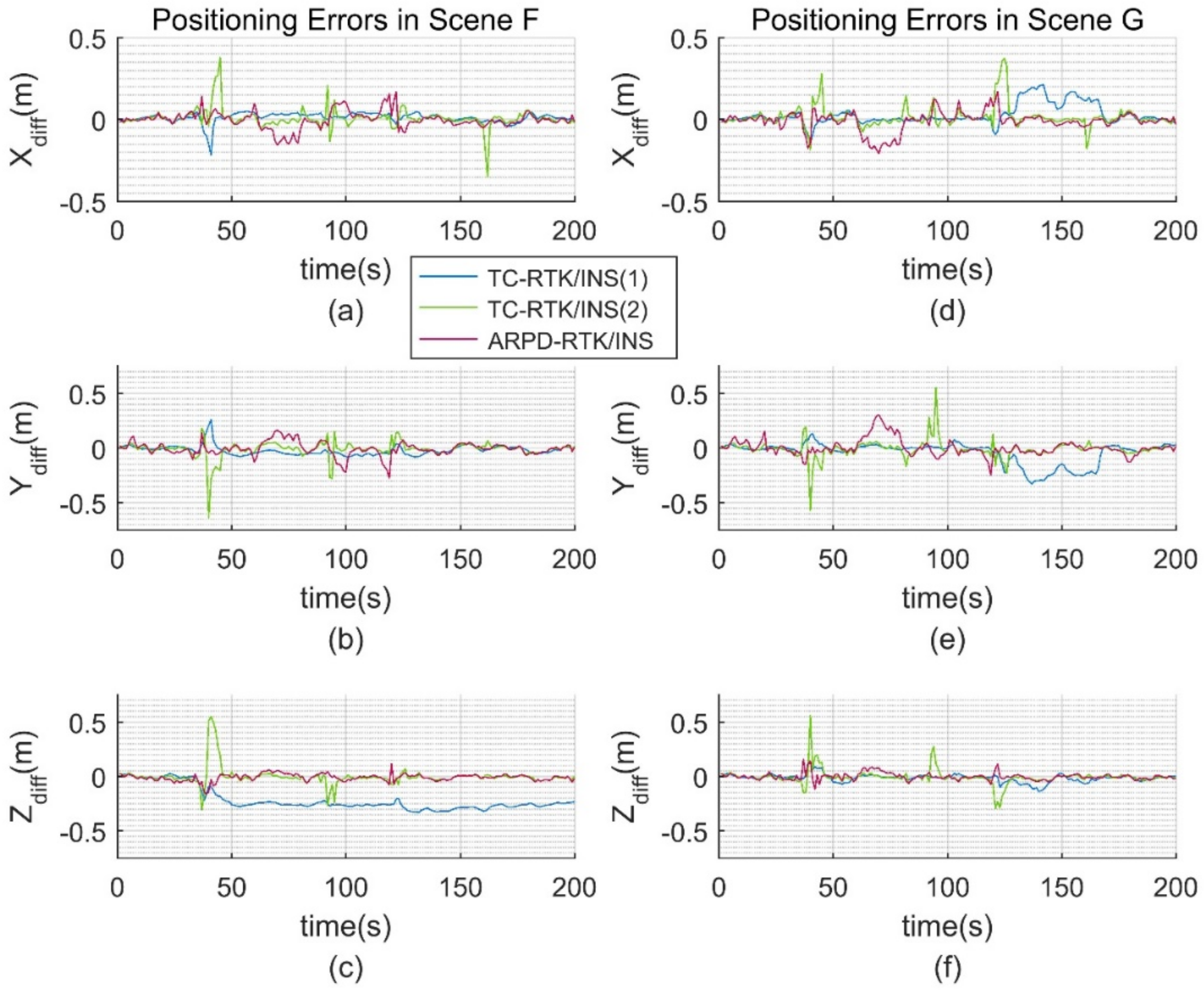
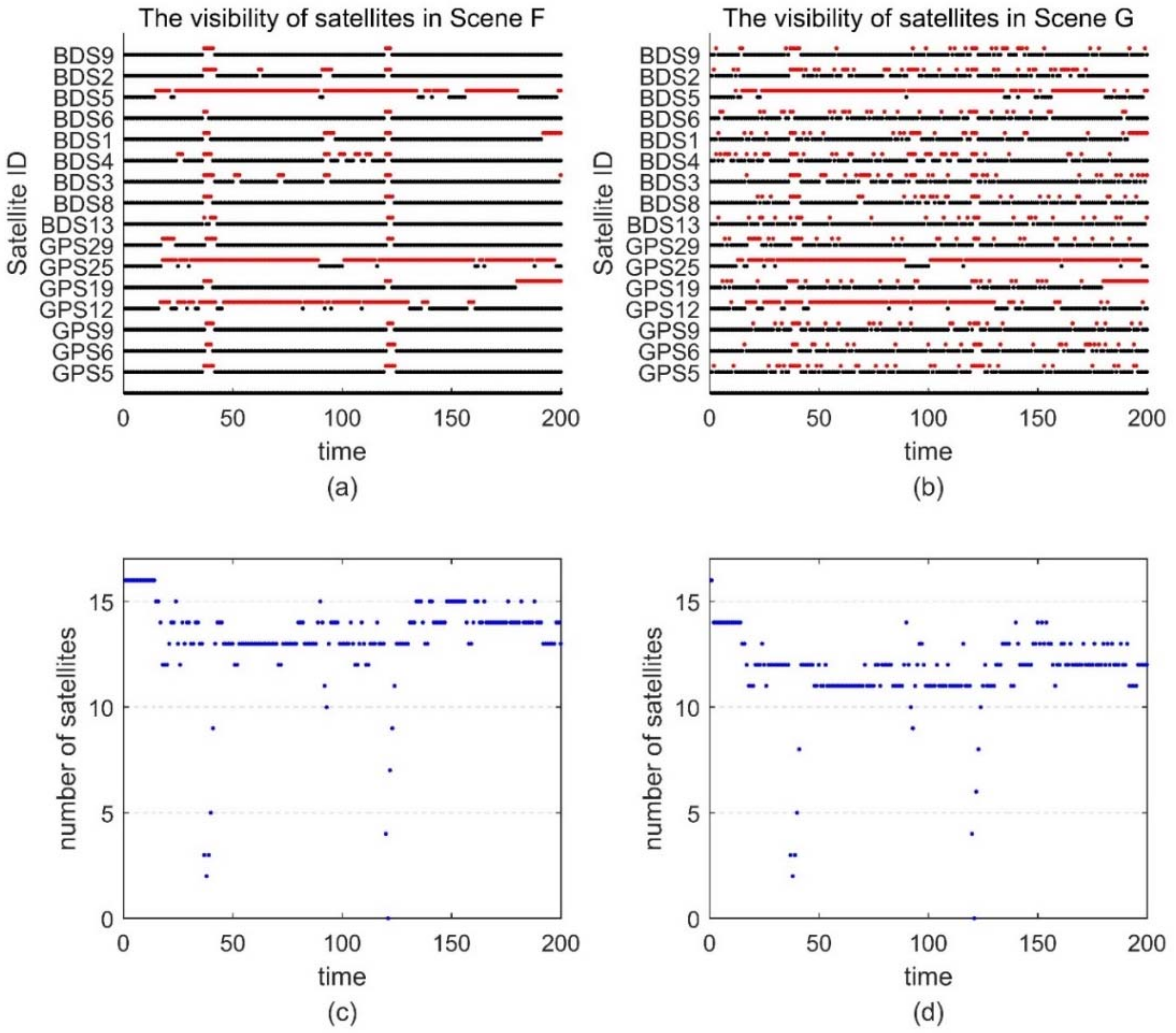
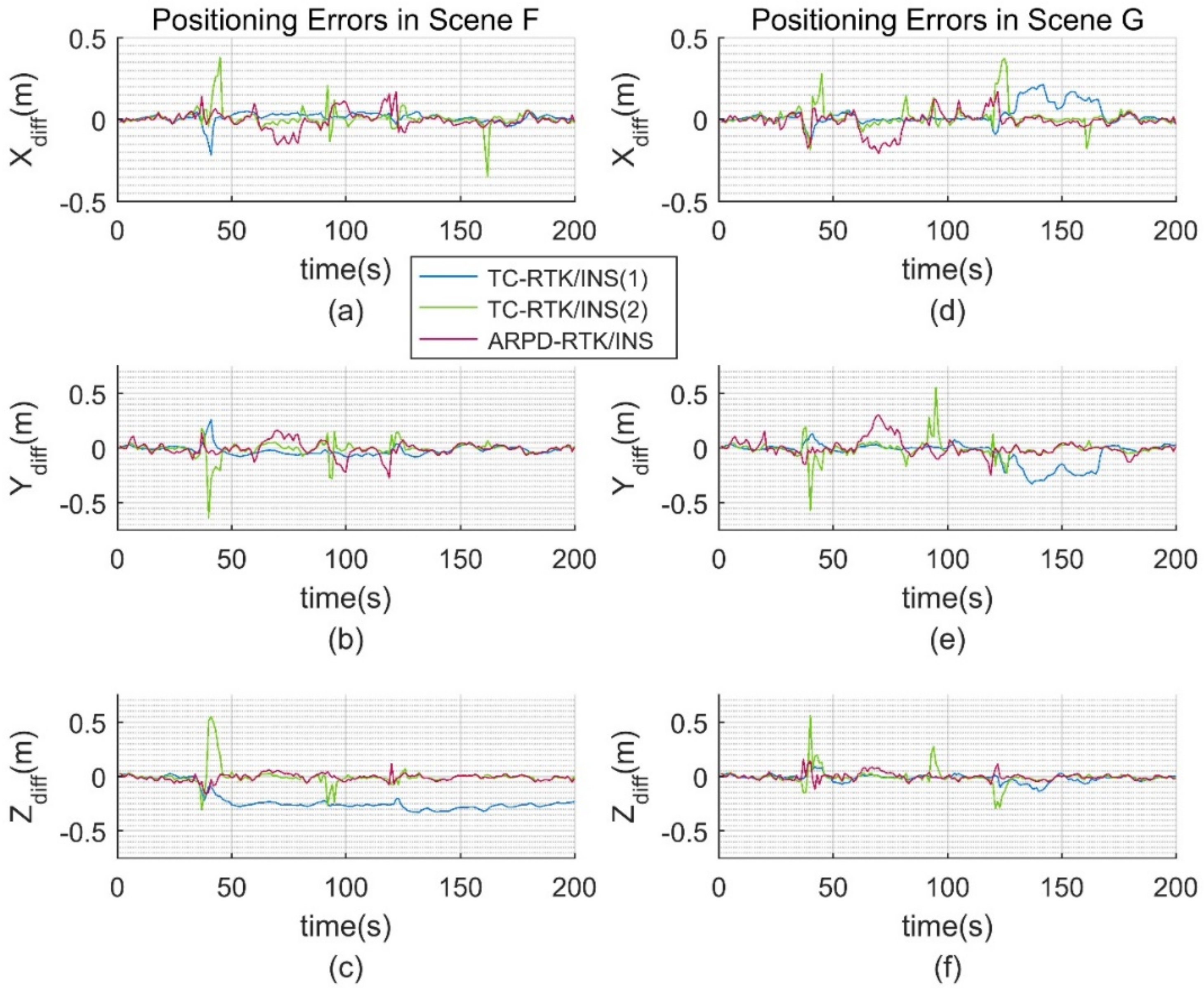
- Scene F: The original real dataset.
- Scene G: Frequent satellite changes are added to the original dataset.
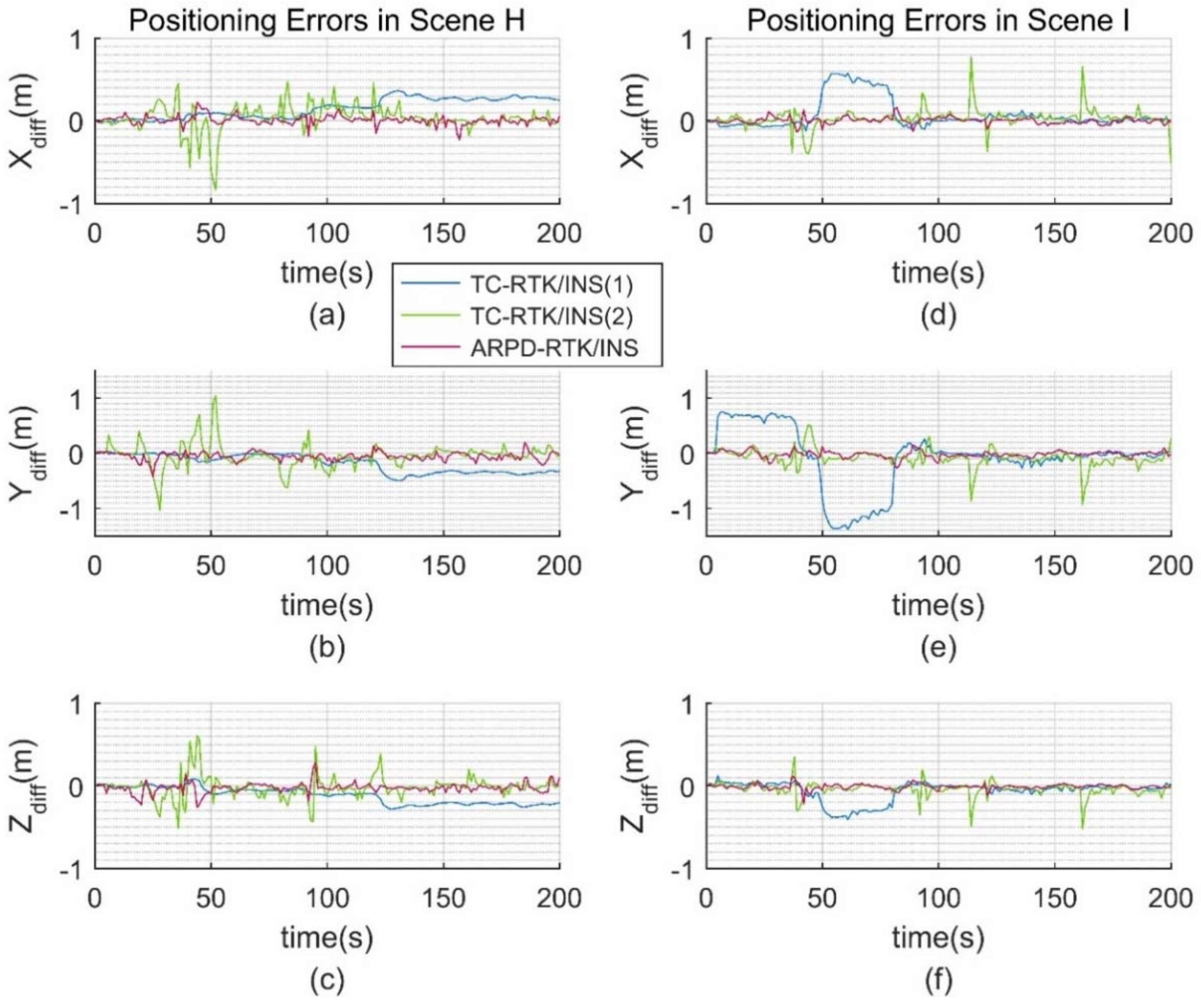
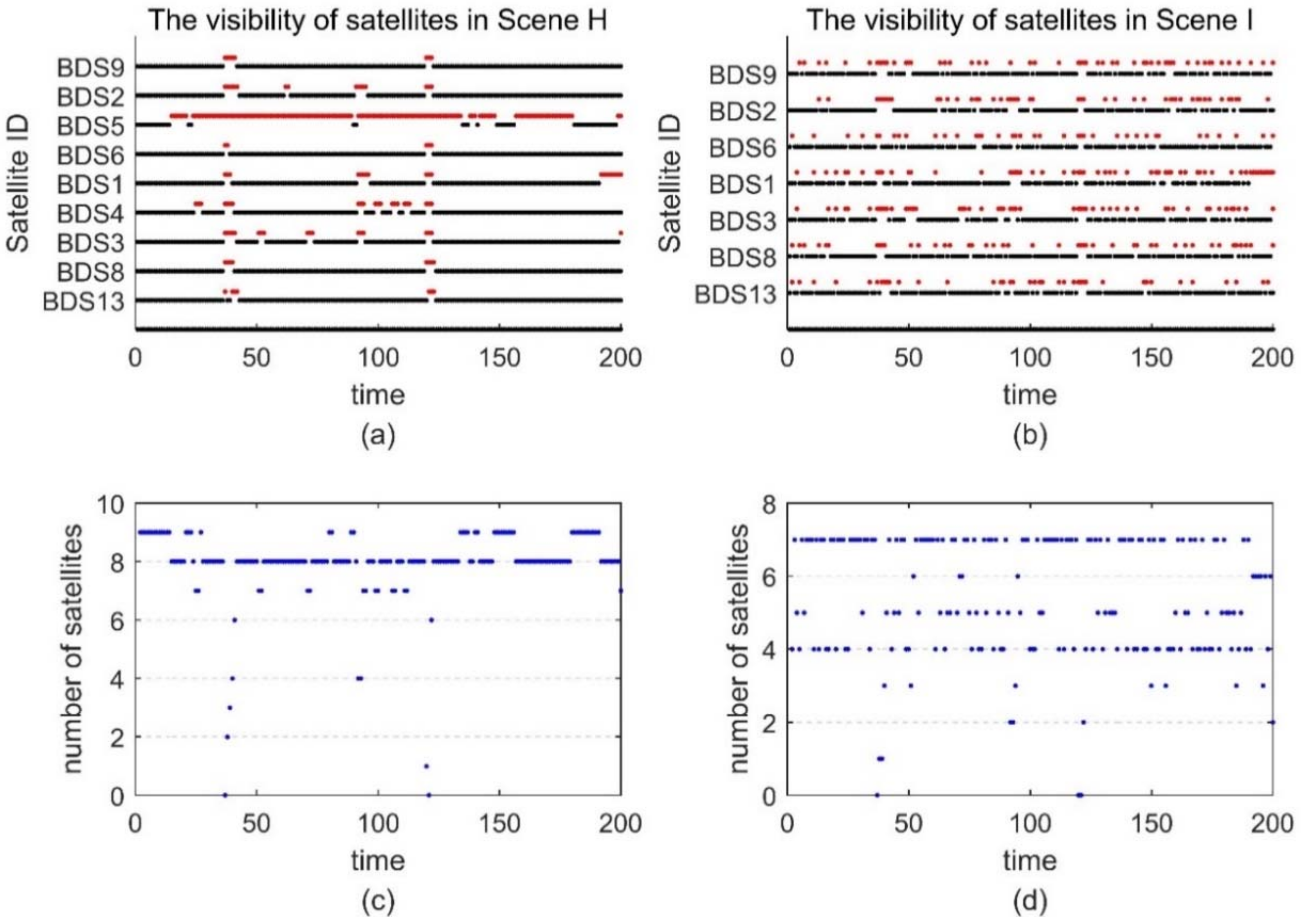
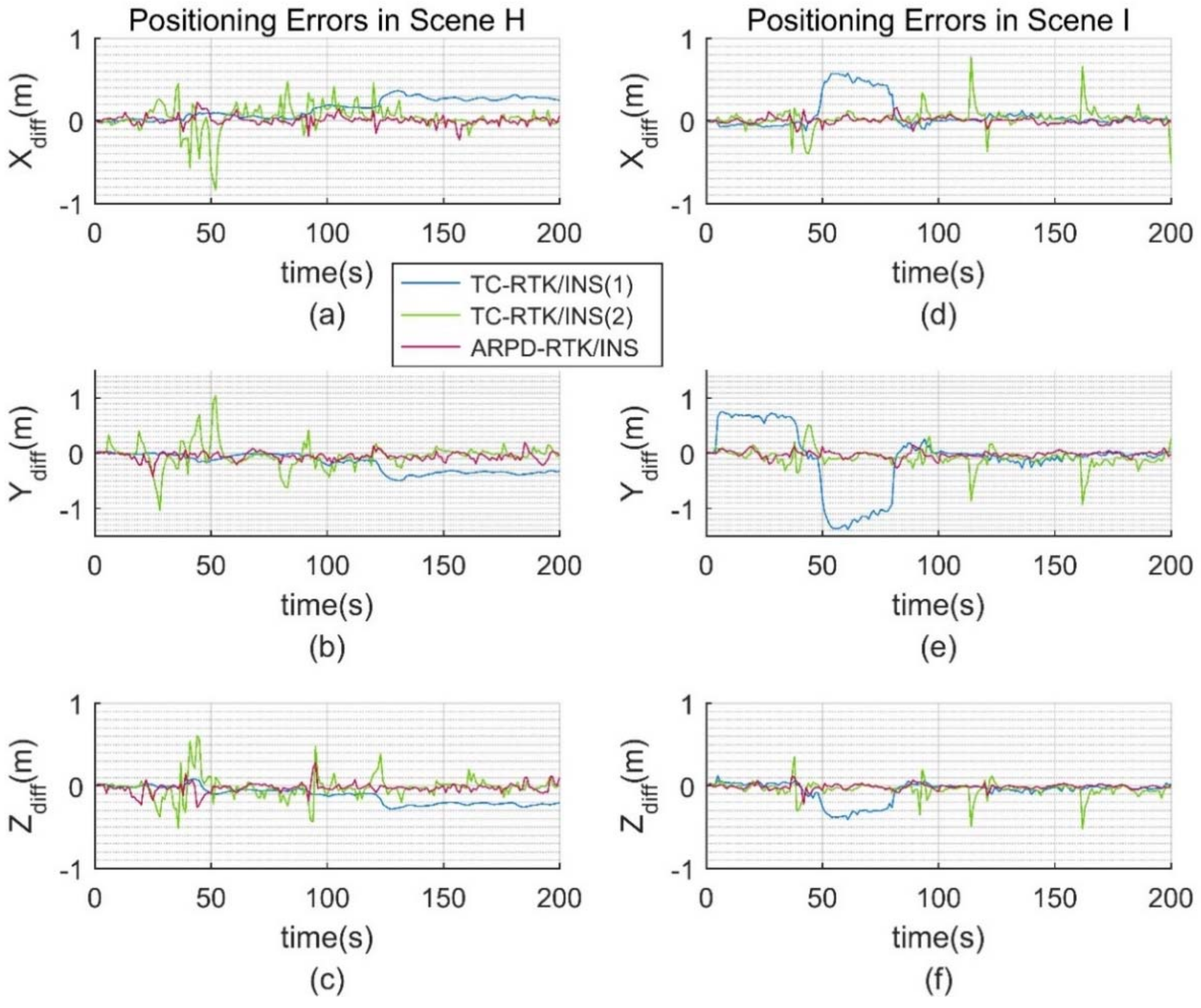
- Scene H: Large pseudorange noise are added to the original dataset. The standard deviation of the additional noise is 3 m. Meanwhile, the number of visible satellites is reduced, and only the BDS observations are preserved.
- Scene I: Frequent satellite changes are added to the Scene H. At the same time, low-elevation satellites are removed.
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Jeju, Korea, 4–6 November 2009. [Google Scholar]
- Hatch, R. Comparison of several arof kinematic techniques. In Proceedings of the 7th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS-94), Salt Lake City, UT, USA, 20–23 September 1994; pp. 363–370. [Google Scholar]
- Hatch, R. The synergism of GPS code and carrier measurements. In Proceedings of the International Geodetic Symposium on Satellite Doppler Positioning, New Mexico State University: Las Cruces, NM, USA; 1983; pp. 1213–1231. [Google Scholar]
- Wang, Y.; Zhan, X.; Zhang, Y. Improved ambiguity function method based on analytical resolution for GPS attitude determination. Meas. Sci. Technol. 2007, 18, 2985. [Google Scholar] [CrossRef]
- Frei, E. Rapid static positioning based of the first ambiguity resolution approach “FARA”: Theory and first results. Manuscr. Geod. 1990, 15, 325–356. [Google Scholar]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Hatch, R. Instantaneous Ambiguity Resolution. Kinematic Systems in Geodesy, Surveying, and Remote Sensing; Schwarz, K.P., Lachapelle, G., Eds.; Springer: New York, NY, USA, 1991; pp. 299–308. [Google Scholar]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Open Service Performance Standard (Version 1.0); China Satellite Navigation Office: Beijing, China, 2013.
- Farrell, J. Aided Navigation: GPS with High Rate Sensors, 1st ed.; McGraw-Hill, Inc.: New York, NY, USA, 2008. [Google Scholar]
- De Gaetani, C.I.; Pagliari, D.; Realini, E.; Reguzzoni, M.; Rossi, L.; Pinto, L. Improving Low-Cost GNSS Navigation in Urban Areas by Integrating a Kinect Device; Springer: Berlin, Germany, 2018; pp. 1–7. [Google Scholar]
- Tao, C.; Chapman, M.A.; Chaplin, B.A. Automated processing of mobile mapping image sequences. ISPRS J. Photogramm. Remote Sens. 2001, 55, 330–346. [Google Scholar] [CrossRef]
- Nur, K.; Feng, S.; Ling, C.; Ochieng, W. Integration of GPS with a WiFi high accuracy ranging functionality. Geo-spat. Inf. Sci. 2013, 16, 155–168. [Google Scholar] [CrossRef]
- Meguro, J.; Hashizume, T.; Takiguchi, J.; Kurosaki, R. Development of an autonomous mobile surveillance system using a network-based RTK-GPS. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3096–3101. [Google Scholar]
- Dorn, M.; Filwarny, J.O.; Wieser, M. Inertially-aided RTK based on tightly-coupled integration using low-cost GNSS receivers. In Proceedings of the European Navigation Conference (ENC), Lausanne, Switzerland, 9–12 May 2017; pp. 186–197. [Google Scholar]
- Han, H.; Wang, J.; Wang, J.; Tan, X. Performance analysis on carrier phase-based tightly-coupled GPS/BDS/INS integration in GNSS degraded and denied environments. Sensors 2015, 15, 8685–8711. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Cui, X.; Lu, M. Urban RTK using adaptive point mass filter with wide-lane measurements. In Proceedings of the 2016 International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 25–28 January 2016; pp. 846–857. [Google Scholar]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Han, S.; Rizos, C. Improving the computational efficiency of the ambiguity function algorithm. J. Geod. 1996, 70, 330–341. [Google Scholar] [CrossRef]
- Kennedy, S.; Hamilton, J.; Martell, H. Architecture and system performance of SPAN-NovAtel’s GPS/INS solution. In Proceedings of the 2006 IEEE/ION Position, Location, and Navigation Symposium, Coronado, CA, USA, 25–27 April 2006. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fiber Optic Gyros | Micro-Electro-Mechanical System (MEMS) Accelerometers | ||
|---|---|---|---|
| Bias | Bias | ||
| Angular Random Walk | Bias Stability | ||
| Scale Factor | 1500 ppm | Scale Factor | 4000 ppm |
| Algorithm | Conditional Control Group A | Experimental Group B | ||||
|---|---|---|---|---|---|---|
| Max Error | RMSE | Fix Rate | Max Error | RMSE | Fix Rate | |
| Single Epoch RTK | 2.62 | 0.85 | 99.83% | 321.77 | 20.66 | 92.78% |
| TC-RTK/INS (1) | 2.59 | 0.85 | 100% | 4.27 | 1.09 | 99.72% |
| TC-RTK/INS (2) | 2.61 | 0.85 | 100% | 17.77 | 1.33 | 98.06% |
| ARPD-RTK/INS | 2.57 | 0.85 | - | 4.59 | 1.06 | - |
| Algorithm | Conditional Control Group C | Experimental Group D | ||||
|---|---|---|---|---|---|---|
| Max Error | RMSE | Fix Rate | Max Error | RMSE | Fix Rate | |
| Single Epoch RTK | 15.811 | 0.442 | 87.51% | 33.887 | 2.576 | 72.85% |
| TC-RTK/INS (1) | 0.026 | 0.009 | 100% | 3.976 | 1.208 | 83.62% |
| TC-RTK/INS (2) | 0.195 | 0.019 | 88.78% | 1.482 | 0.073 | 75.68% |
| ARPD-RTK/INS | 0.021 | 0.009 | - | 0.044 | 0.012 | - |
| Algorithm | Max Error | RMSE | Fix Rate |
|---|---|---|---|
| TC-RTK/INS (1) | 1.903 | 0.491 | 78.07% |
| TC-RTK/INS (2) | 2.050 | 0.226 | 69.52% |
| ARPD-RTK/INS | 0.268 | 0.042 | - |
| Algorithm | Original Scene F | Frequent Cycle Slips Scene G | ||||
|---|---|---|---|---|---|---|
| Max Error | RMSE | Fix Rate | Max Error | RMSE | Fix Rate | |
| TC-RTK/INS (1) | 0.351 | 0.244 | 90.05% | 0.396 | 0.133 | 83.58% |
| TC-RTK/INS (2) | 0.818 | 0.128 | 85.07% | 0.821 | 0.126 | 85.07% |
| ARPD-RTK/INS | 0.330 | 0.079 | - | 0.376 | 0.101 | - |
| Algorithm | Large Noise Scene H | Insufficient Satellite Scene I | ||||
|---|---|---|---|---|---|---|
| Max Error | RMSE | Fix Rate | Max Error | RMSE | Fix Rate | |
| TC-RTK/INS (1) | 0.665 | 0.343 | 86.57% | 1.548 | 0.597 | 81.59% |
| TC-RTK/INS (2) | 1.253 | 0.239 | 72.14% | 1.344 | 0.311 | 59.20% |
| ARPD-RTK/INS | 0.320 | 0.082 | - | 0.458 | 0.124 | - |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Li, W.; Cui, X.; Zhao, S.; Lu, M. A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments. Sensors 2018, 18, 2160. https://doi.org/10.3390/s18072160
Li W, Li W, Cui X, Zhao S, Lu M. A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments. Sensors. 2018; 18(7):2160. https://doi.org/10.3390/s18072160
Chicago/Turabian StyleLi, Wei, Wenyi Li, Xiaowei Cui, Sihao Zhao, and Mingquan Lu. 2018. "A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments" Sensors 18, no. 7: 2160. https://doi.org/10.3390/s18072160
APA StyleLi, W., Li, W., Cui, X., Zhao, S., & Lu, M. (2018). A Tightly Coupled RTK/INS Algorithm with Ambiguity Resolution in the Position Domain for Ground Vehicles in Harsh Urban Environments. Sensors, 18(7), 2160. https://doi.org/10.3390/s18072160