Design of a Low-Power, Small-Area AEC-Q100-Compliant SENT Transmitter in Signal Conditioning IC for Automotive Pressure and Temperature Complex Sensors in 180 Nm CMOS Technology

 , ,
, , 
Abstract
:1. Introduction
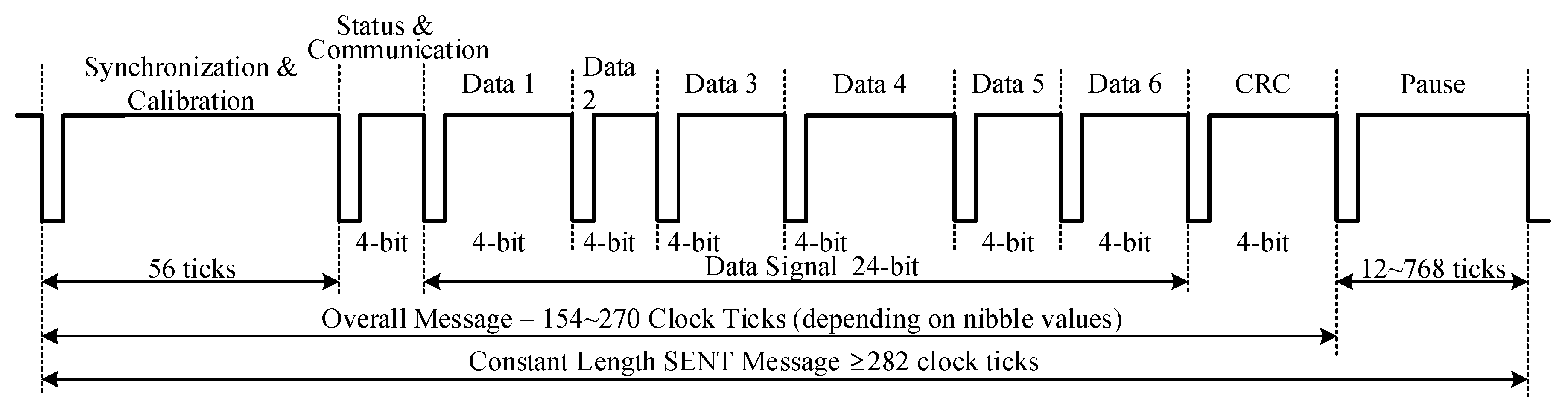
2. Overview of the SENT Protocol
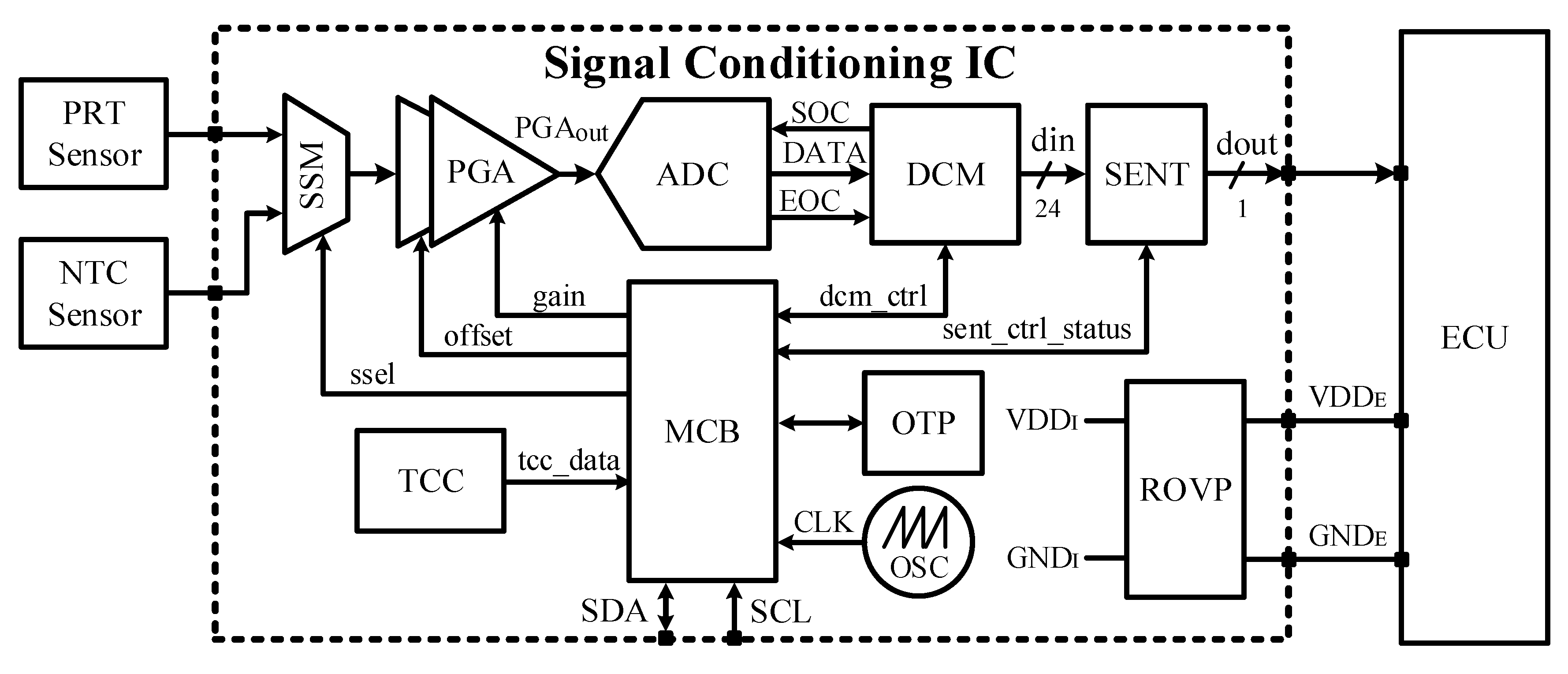
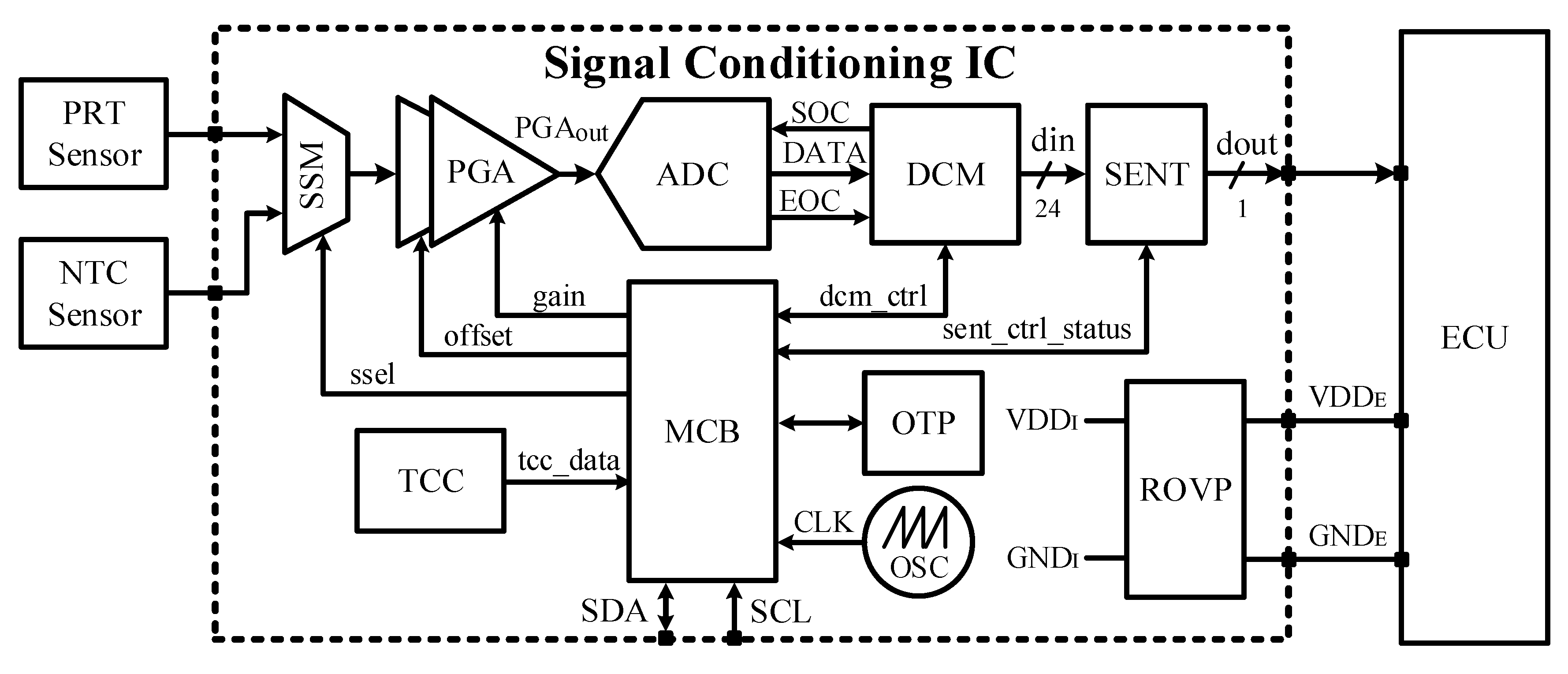
3. Architecture of the Signal Conditioning IC for Pressure and Temperature Sensors
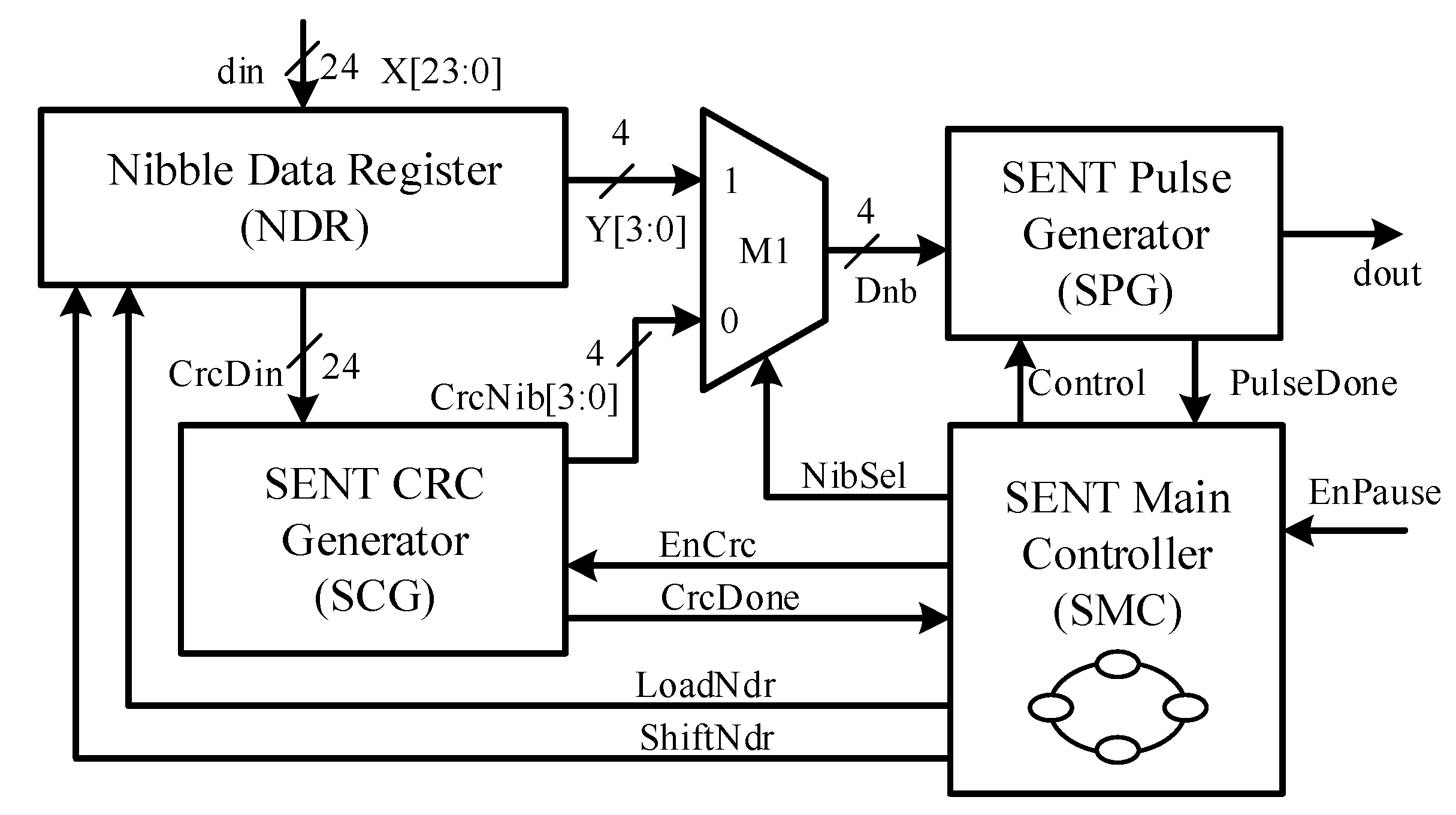
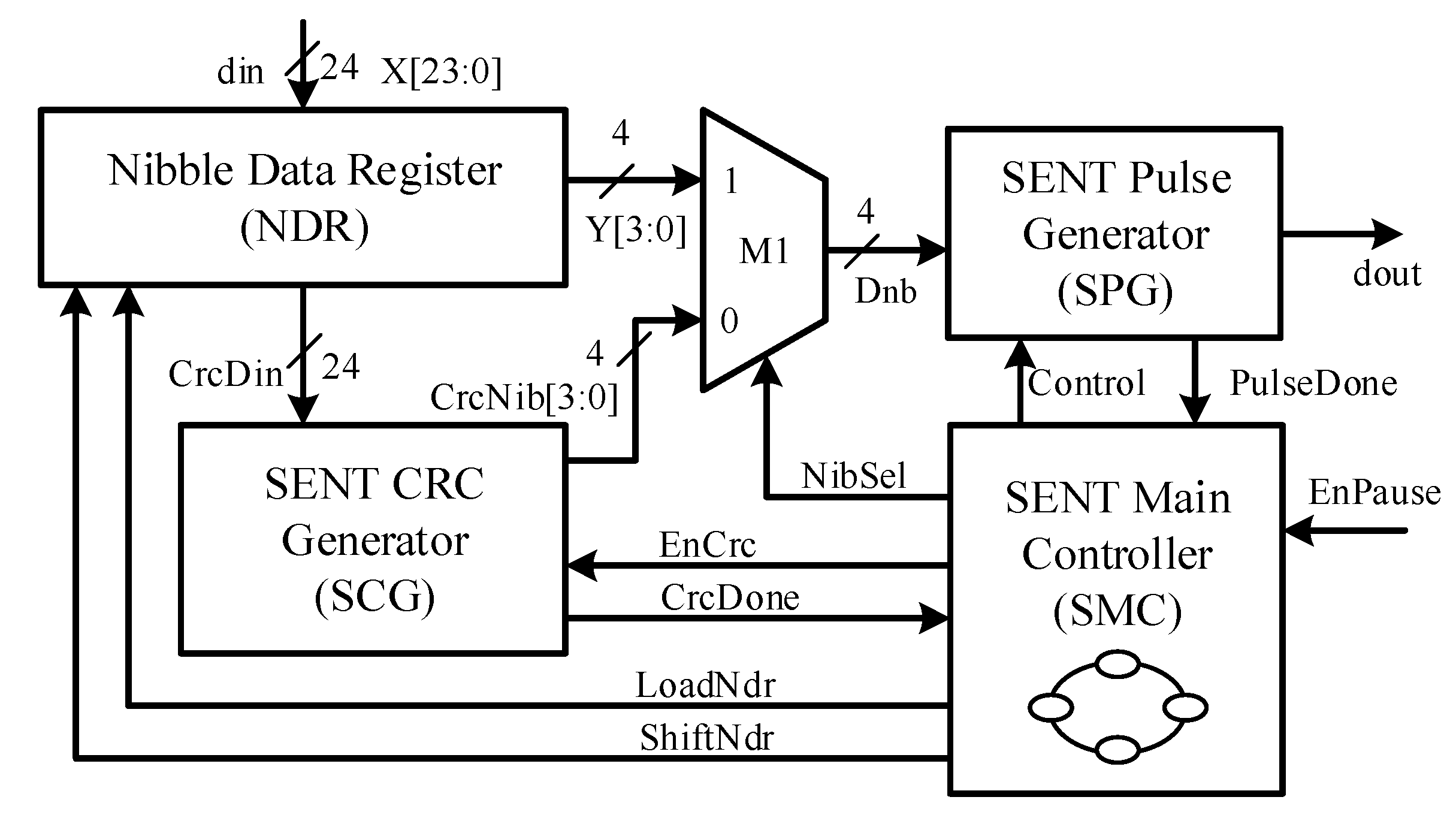
4. The Architecture of the SENT Transmitter
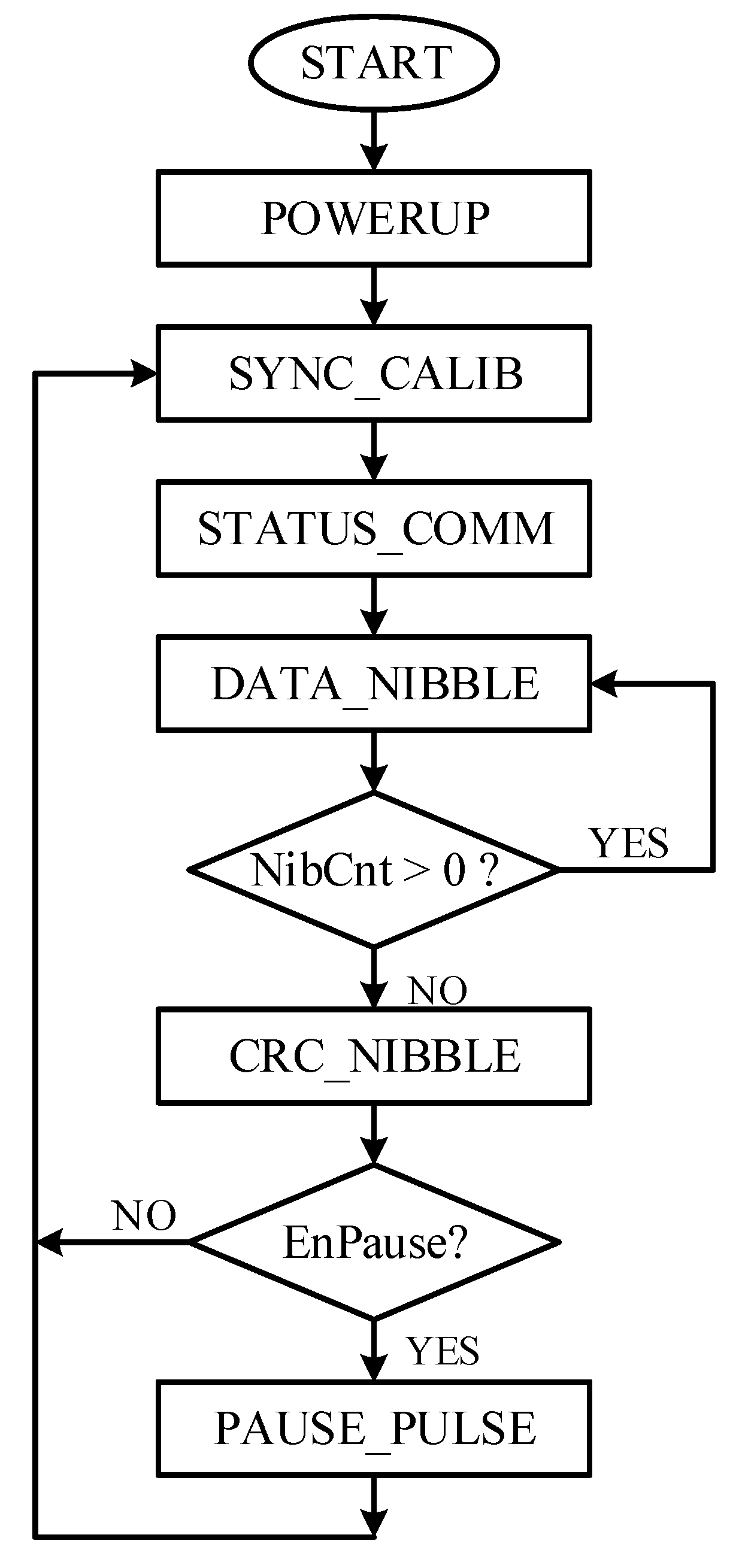
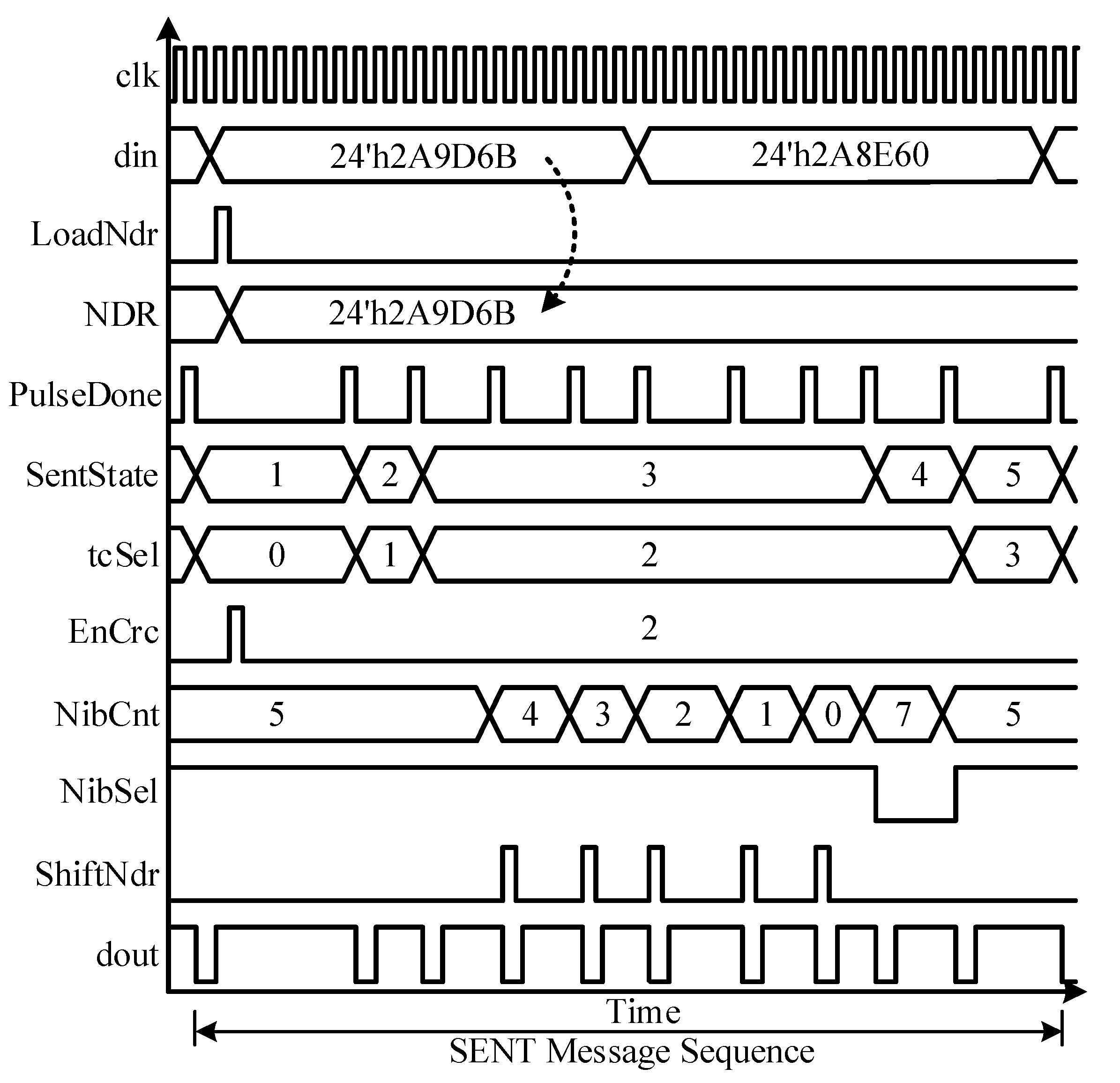
4.1. SENT Main Controller (SMC)
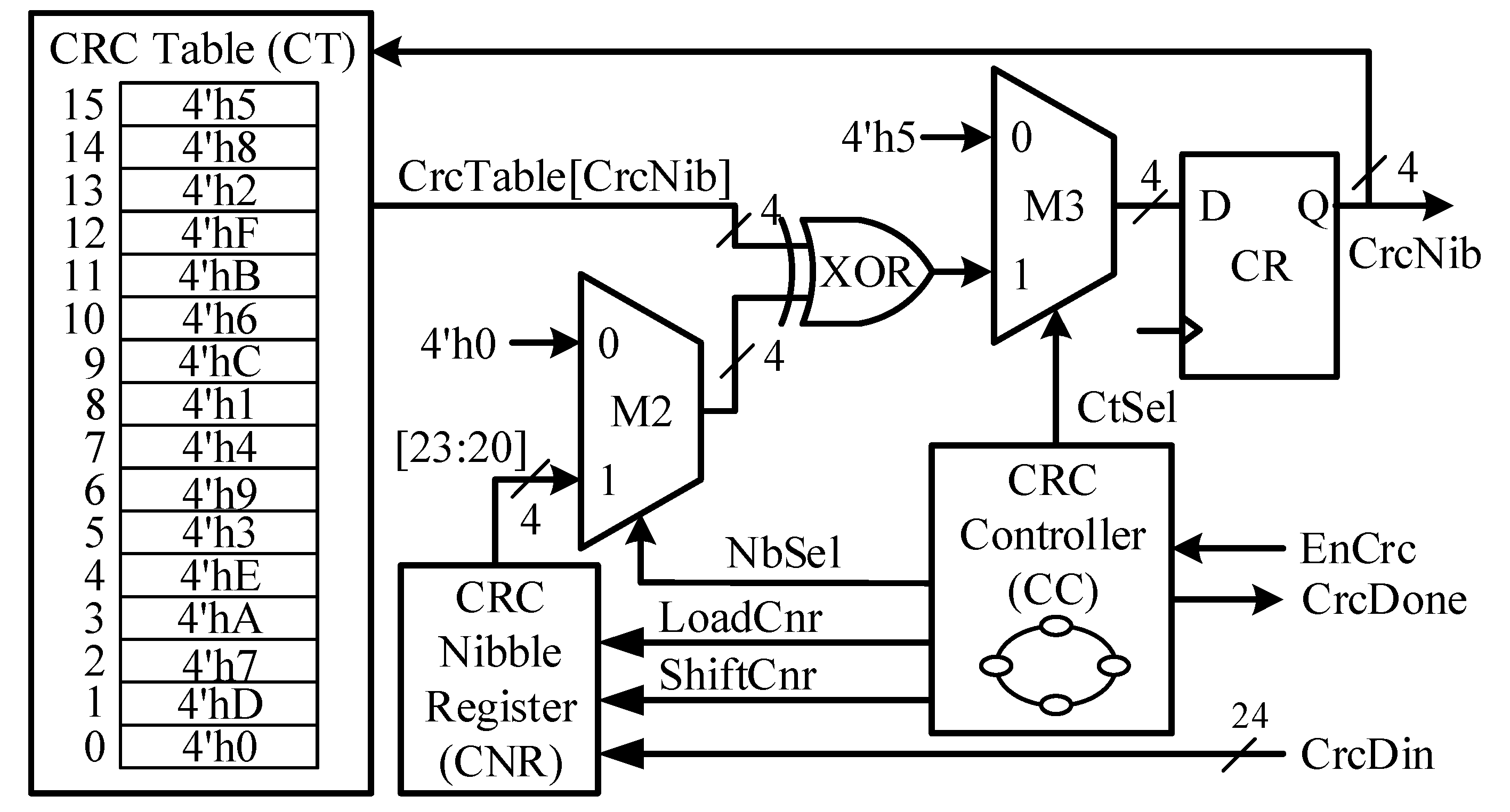
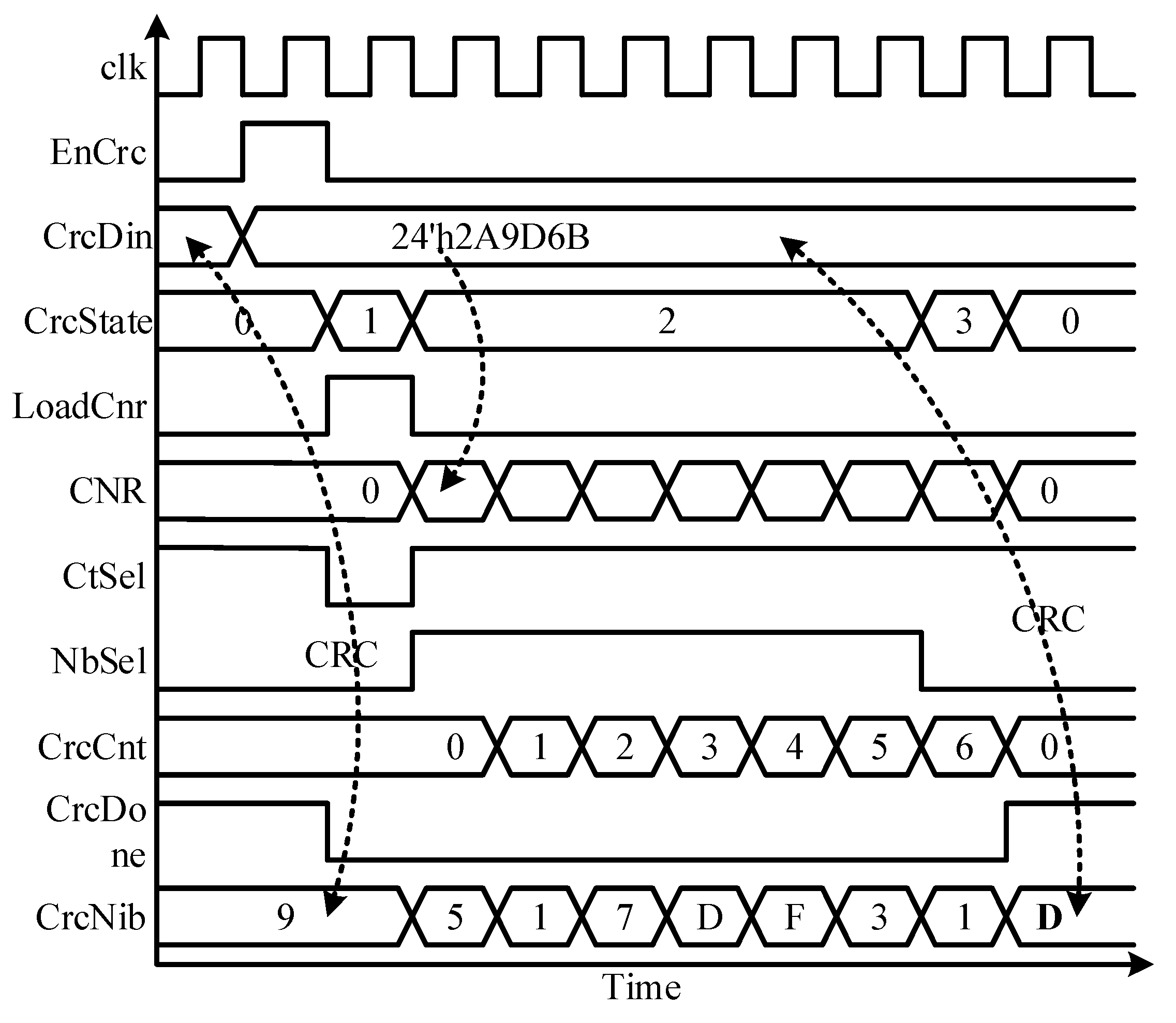
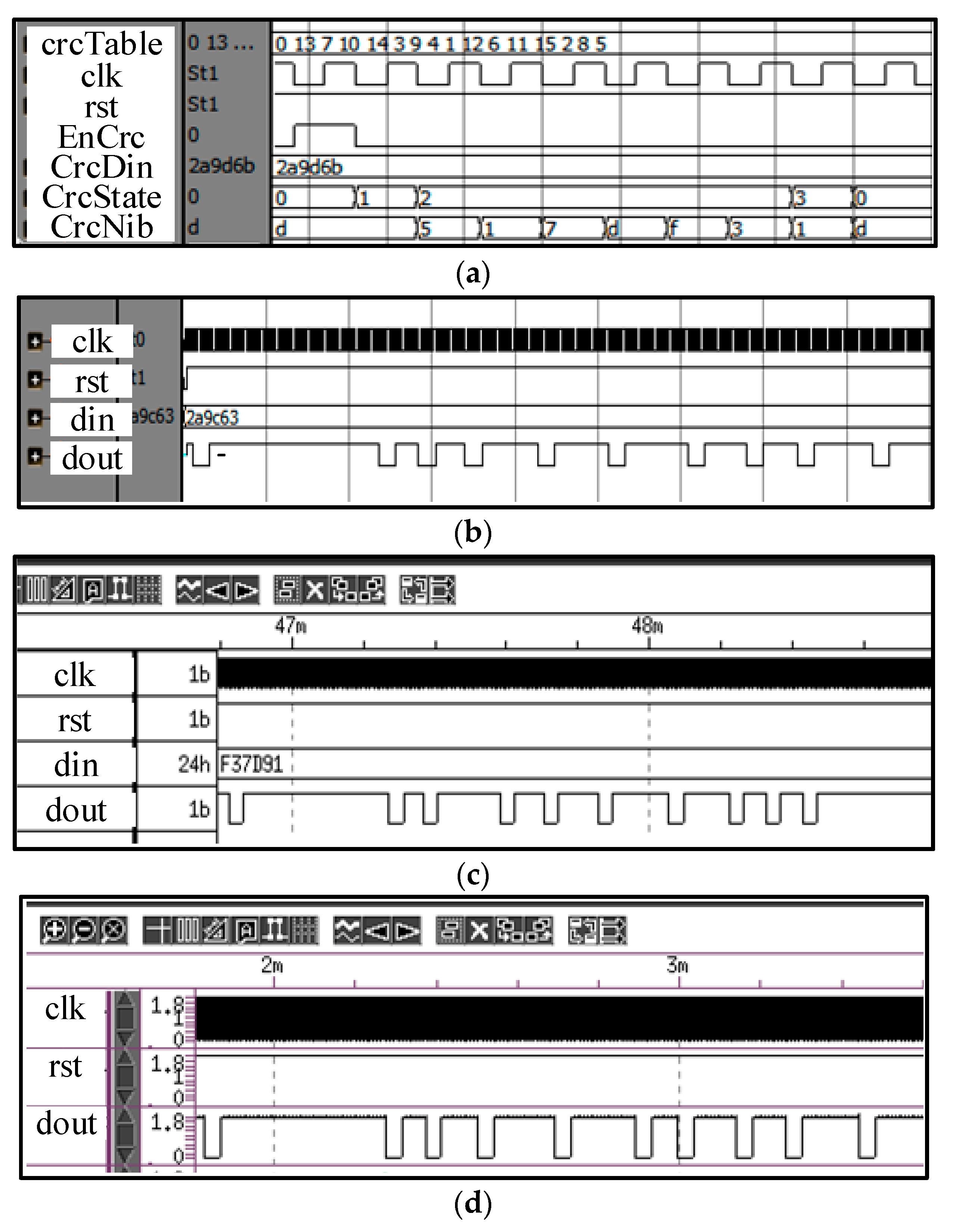
4.2. SENT CRC Cenerator (SCG)
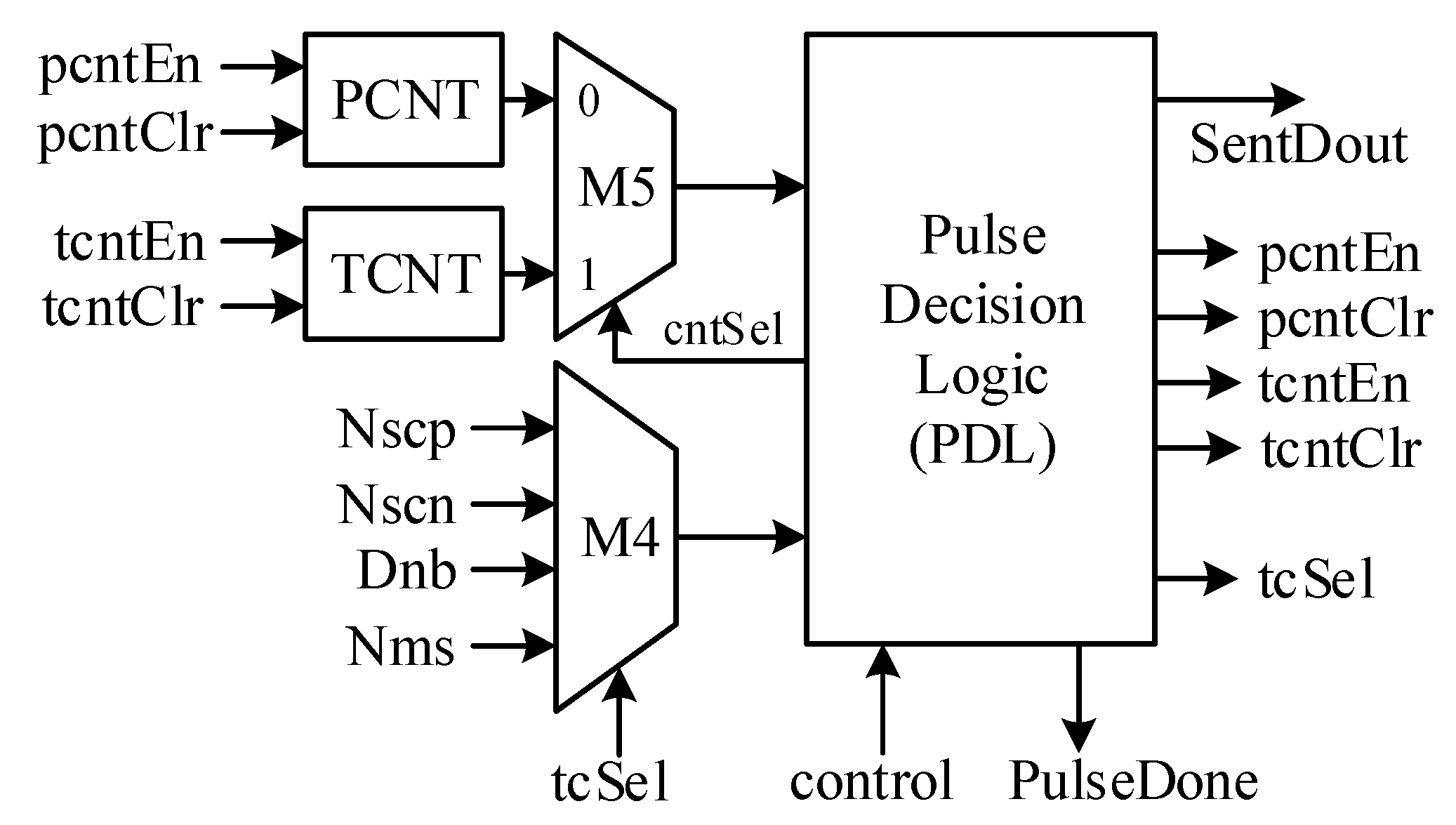
4.3. SENT Pulse Generator (SPG)
4.4. Nibble Data Register (NDR)
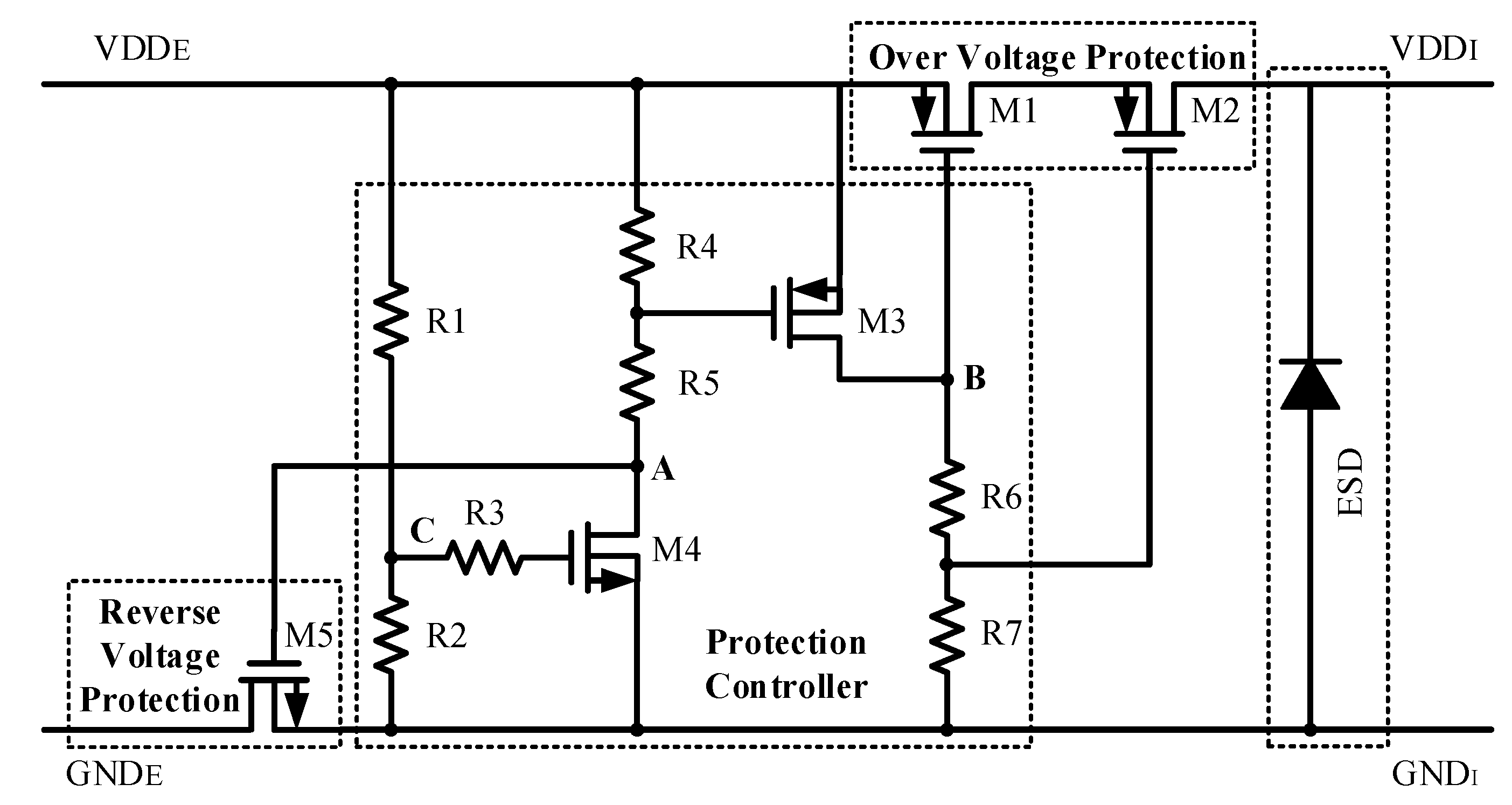
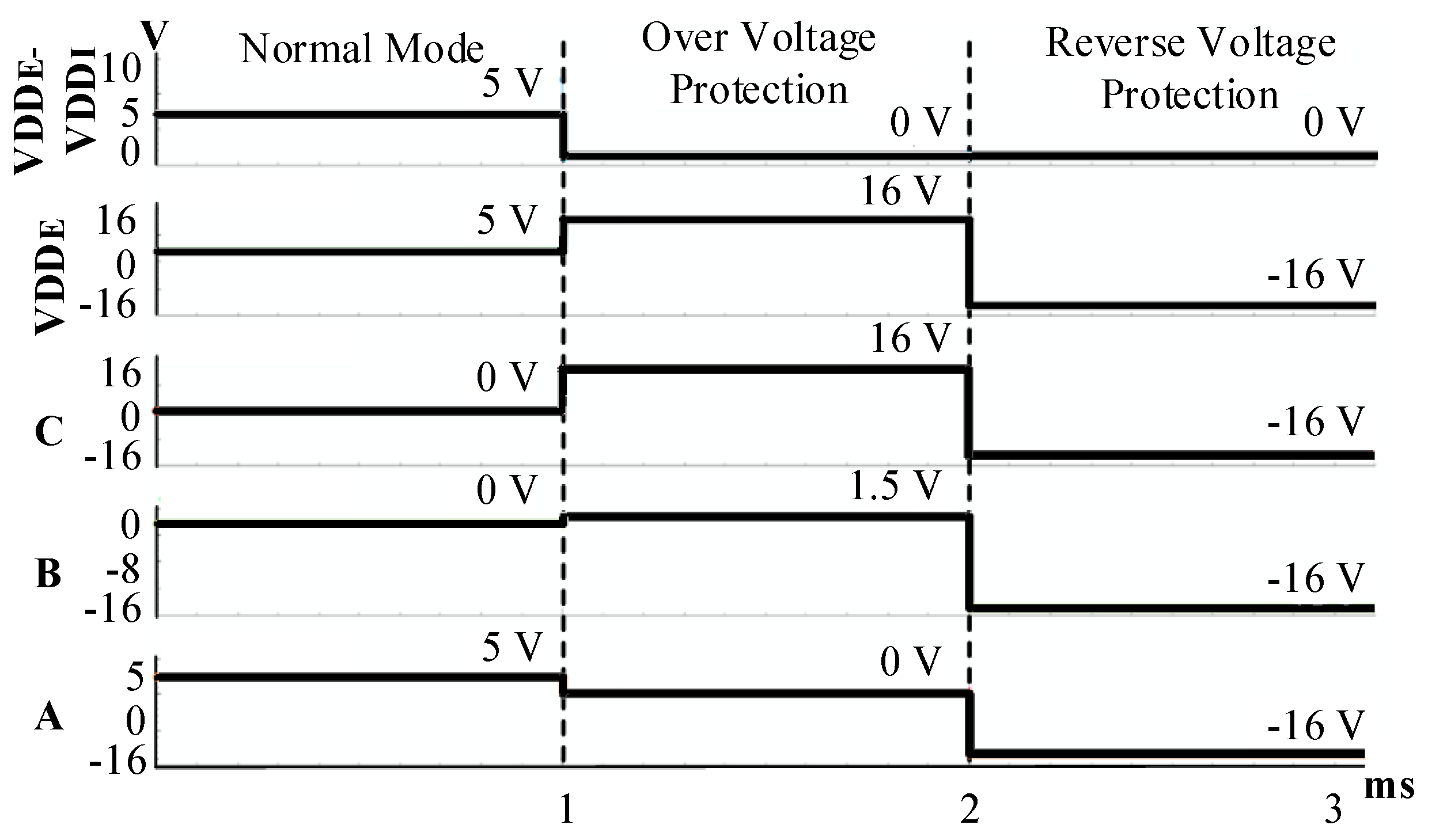
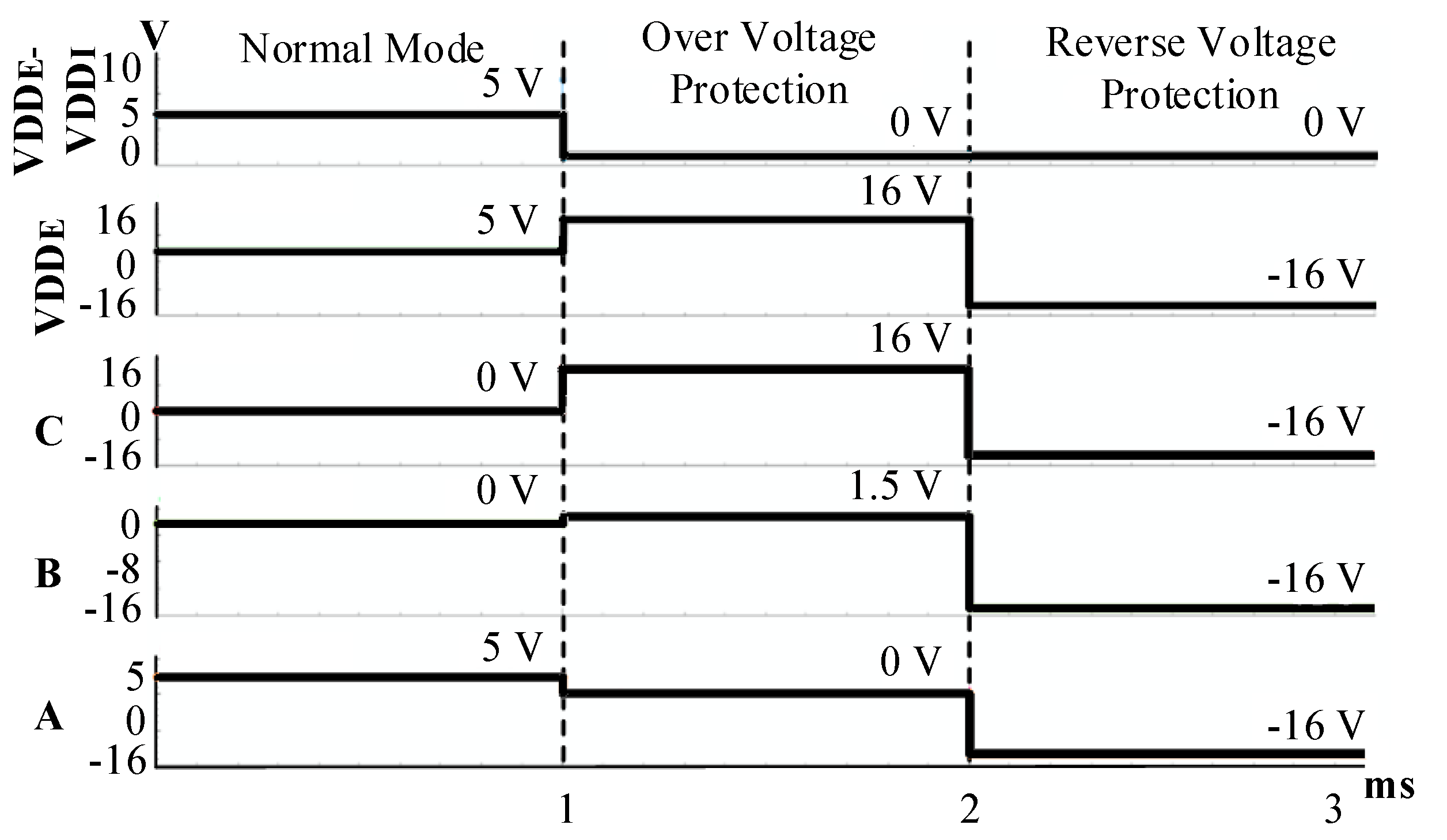
5. Reverse and over Voltage Protection (ROVP)
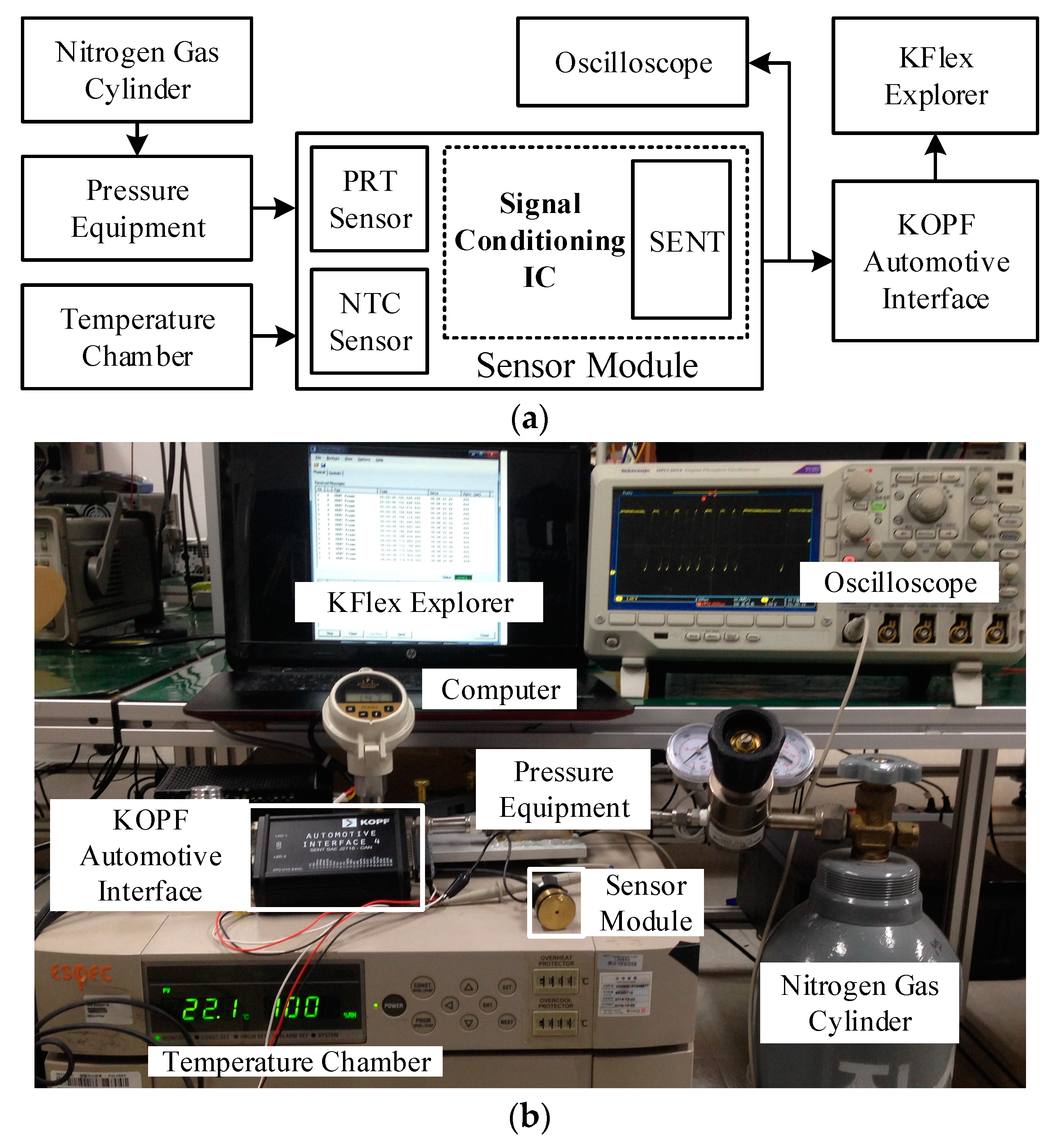
6. Measurement and Simulation Results
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Schweppe, L.; Zimmermann, A.; Grill, D. Flexible On-Board Stream Processing for Automotive Sensor Data. IEEE Trans. Ind. Inf. 2010, 6, 81–92. [Google Scholar] [CrossRef]
- Fleming, W.J. Overview of automotive sensors. IEEE Sens. J. 2001, 1, 296–308. [Google Scholar] [CrossRef]
- Kottapalli, A.G.P.; Asadnia, M.; Miao, M.; Tan, C.W.; Barbastathis, G.; Triantafyllou, M. Polymer MEMS pressure sensor arrays for fish-like underwater sensing applications. IET Micro Nano Lett. 2012, 7, 1189–1192. [Google Scholar] [CrossRef]
- Abeysinghe, D.C.; Dasgupta, S.; Boyd, J.T.; Jackson, H.E. A novel MEMS pressure sensor fabricated on an optical fiber. IEEE Photonics Technol. Lett. 2001, 13, 993–995. [Google Scholar] [CrossRef]
- Middlemiss, R.P.; Bramsiepe, S.G.; Douglas, R.; Hough, J.; Paul, D.J.; Rowan, S.; Hammond, G.D. Field Tests of a Portable MEMS Gravimeter. Sensors 2017, 17, 2571. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Sun, W.; Yeow, J.T.W. Internal Model-Based Robust Tracking Control Design for the MEMS Electromagnetic Micromirror. Sensors 2017, 17, 1215. [Google Scholar] [CrossRef] [PubMed]
- Paret, D. Multiplxed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire; Wiley: Hoboken, NJ, USA, 2007; ISBN 9780470511770. [Google Scholar]
- Fleming, W.J. New Automotive Sensors A Review. IEEE Sens. J. 2008, 8, 1900–1921. [Google Scholar] [CrossRef]
- Lee, D.S.; Tiwari, H.D.; Kim, S.Y.; Lee, J.; Park, H.G.; Pu, Y.G.; Seo, M.; Lee, K.Y. A Highly Linear, Small-Area Analog Front End With Gain and Offset Compensation for Automotive Capacitive Pressure Sensors in 0.35 µm CMOS. IEEE Sens. J. 2015, 15, 1967–1976. [Google Scholar] [CrossRef]
- Prochaska, M. Green Drive—Technologies for Sustainable Mobility. In Proceedings of the IEEE VXV International Symposium on Theoretical Engineering, Lübeck, Germany, 22–24 June 2009; pp. 1–3, ISBN 978–3-8007-3166-4. [Google Scholar]
- Gangopadhyay, D.; Allstot, E.G.; Dixon, A.M.R.; Natarajan, K.; Gupta, S.; Allstot, D.J. Compressed Sensing Analog Front-End for Bio-Sensor Applications. IEEE J. Solid State Circuits 2014, 49, 426–438. [Google Scholar] [CrossRef]
- Zou, X.; Xu, X.; Yao, L.; Lian, Y. A 1-V 450-nW Fully Integrated Programmable Biomedical Sensor Interface Chip. IEEE J. Solid State Circuits 2009, 44, 1067–1077. [Google Scholar] [CrossRef]
- Hacine, S.; Khach, T.E.; Mailly, F.; Latorre, L.; Nouet, P. A micro-power high-resolution ΣΔ CMOS temperature sensor. In Proceedings of the 2011 IEEE Sensors, Limerick, UK, 28–31 October 2011; pp. 1530–1533. [Google Scholar] [CrossRef]
- Ng, K.A.; Chan, P.K. A CMOS analog front-end IC for portable EEG/ECG monitoring applications. IEEE Trans. Circuits Syst. I Reg. Papers 2005, 52, 2335–2347. [Google Scholar] [CrossRef]
- Leng, Y.; Zhao, G.; Li, Q.; Sun, C.; Liu, S. A High Accuracy Signal Conditioning Method and Sensor Calibration System for Wireless Sensor in Automotive Tire Pressure Monitoring System. In Proceedings of the IEEE International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–25 September 2007; pp. 1833–1837. [Google Scholar]
- Nagaraj, S.C.; Detrick, B. HIL and RCP Tools for Embedded Controller Development in Hybrid Vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2007; pp. 896–902. [Google Scholar] [CrossRef]
- SAE SENT Task Force. SENT—Single Edge Nibble Transmission for Automotive Applications SAE J2716. SAE Int. 2010. [Google Scholar] [CrossRef]
- Horsky, P.; Kamenicky, P.; Baros, P. SENT data transmission with low EMC emissions. In Proceedings of the 10th International Symposium on Electromagnetic Compatibility, York, UK, 26–30 September 2011; pp. 386–390. [Google Scholar]
- Beaurenaut, L.; Eggiman, C.; Gastinger, F.; Platzdasch, H.; Friedrich, R.; Michael, S. Single-Edge Nibble Transmission: Challenges and Evolutions. SAE Tech. Paper 2009. [Google Scholar] [CrossRef]
- Bauerle, P.A. Systems and Method for Improving Accuracy of Sensor Signals Received via SENT Protocol. U.S. Patent 7,761,251, 20 July 2010. [Google Scholar]
- Cho, S.H.; Lee, D.S.; Ali, I.; Kim, S.Y.; Pu, Y.; Yoo, S.; Lee, K.Y. Highly reliable automotive integrated protection circuit for human body model ESD of +6 kV, over voltage, and reverse voltage. Electron. Lett. 2017, 53, 843–845. [Google Scholar] [CrossRef]
- AEC-Q100-Rev. H. Failure Mechanism Based Stress Test Qualification for Integrated Circuits. Automotive Electronics Council, 2014. Available online: http://www.aecouncil.com/AECDocuments.html (accessed on 25 December 2017).
- Meyer, G.; Valldorf, J.; Gessner, W. Advanced Microsystems for Automotive Applications; Springer: Berlin, Germany, 2009; ISBN 978. [Google Scholar]
- Chuang, L.; Cordovilla, F.; Jagdheesh, R.; Oana, J.L. Design Optimization and Fabrication of a Novel Structural SOI Piezoresistive Pressure Sensor with High Accuracy. Sensors 2018, 18, 1–16. [Google Scholar] [CrossRef]
- Selyunin, K.; Jaksic, S.; Nguyen, T.; Reidl, C.; Hafner, U.; Bartocci, E.; Nickovic, D.; Grosu, R. Runtime Monitoring with Recovery of the SENT Communication Protocol. Comput. Aided Verif. 2017, 10426, 336–355. [Google Scholar] [CrossRef]
- Chandran, D.; Guddeti, J.; Sadashivaiah, S. Automotive micro-controller interface protocol silicon validation using PWM based protocol emulator. In Proceedings of the International Symposium on Embedded Computing and System Design (ISED), Patna, India, 15–17 December 2016; pp. 196–200. [Google Scholar] [CrossRef]
- Baran, B.; Pues, H.; Stijnen, K.; Dehaene, W. EMI resisting low-EME SENT drivers in 0.18 µm CMOS. In Proceedings of the International Workshop on the Electromagnetic Compatibility of Integrated Circuits (EMCCompo), St. Petersburg, Russia, 4–8 July; 2017; pp. 69–72. [Google Scholar] [CrossRef]
- Automotive Interface AI4 Intelligent Interface with 2 SENT Receiver and 2 SENT Transmitter. KOPF GmbH, Version 2016/01. Available online: http://www.kopfweb.de/index.php/en/ (accessed on 24 February 2017).
- KSENT User Manual Firmware. Firmware V02.07. Available online: http://www.kopfweb.de/index.php/en/ (accessed on 24 February 2017).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | M1 | M2 | M3 | M4 | M5 |
|---|---|---|---|---|---|
| Normal | ON | ON | OFF | OFF | ON |
| Over protection | OFF | OFF | ON | ON | OFF |
| Reverse protection | OFF | OFF | OFF | OFF | OFF |
| SENT | ROVP | ||
|---|---|---|---|
| Parameter | Value | Parameter | Value |
| Circuit | SENT transmitter | Circuit | Reverse and over protection circuit |
| Process | 180 nm CMOS | Process | 180 nm CMOS |
| Maximum current | 50 μA | Integration level | On-chip |
| Supply voltage | 1.8 V | Protection range | (−16–16) V |
| Power consumption | 90 μW | ESD (HBM) | 6 kV |
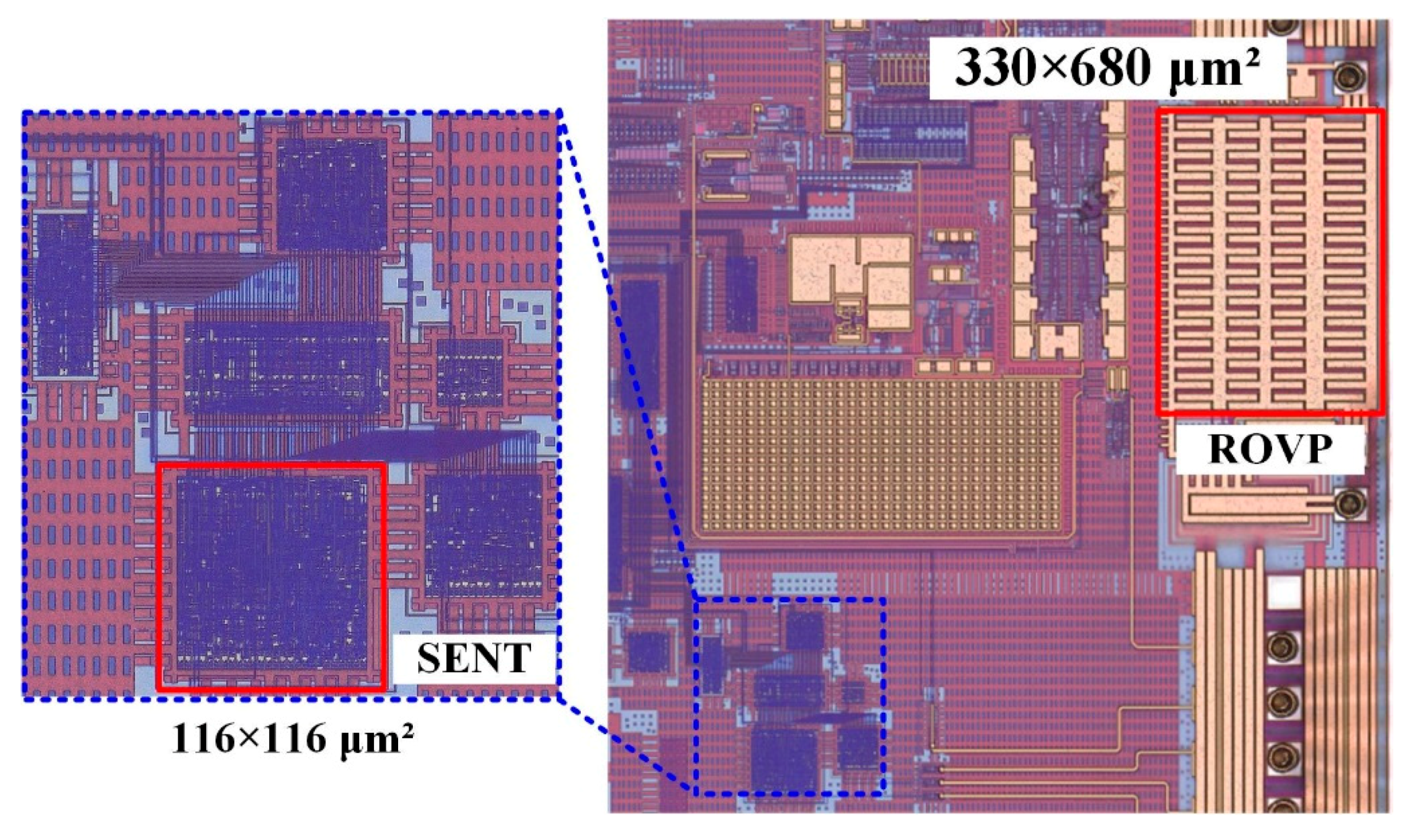
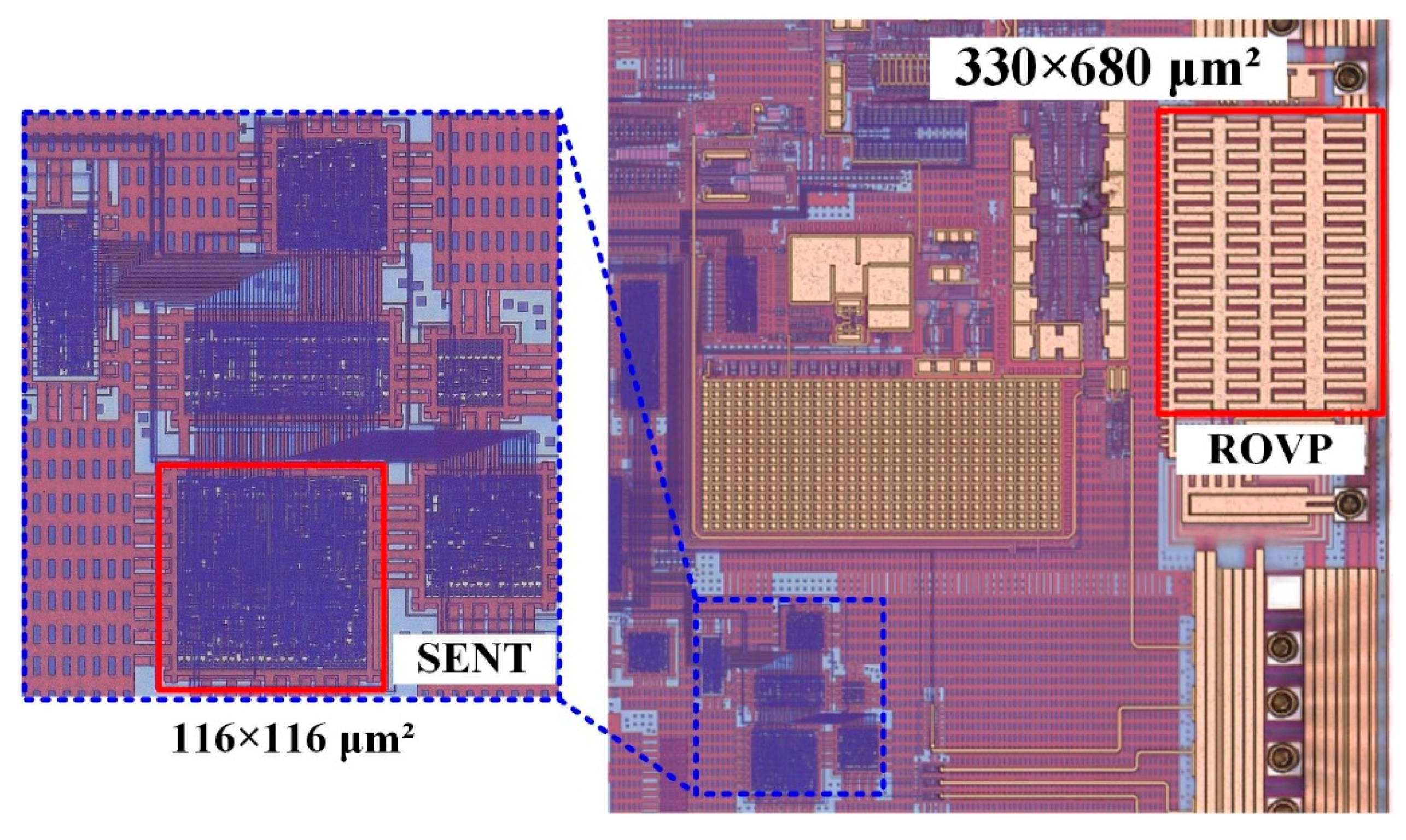
| Area | 116 μm × 116 μm | Area | 330 μm × 680 μm |
| Gate count | 4.314 K | ||
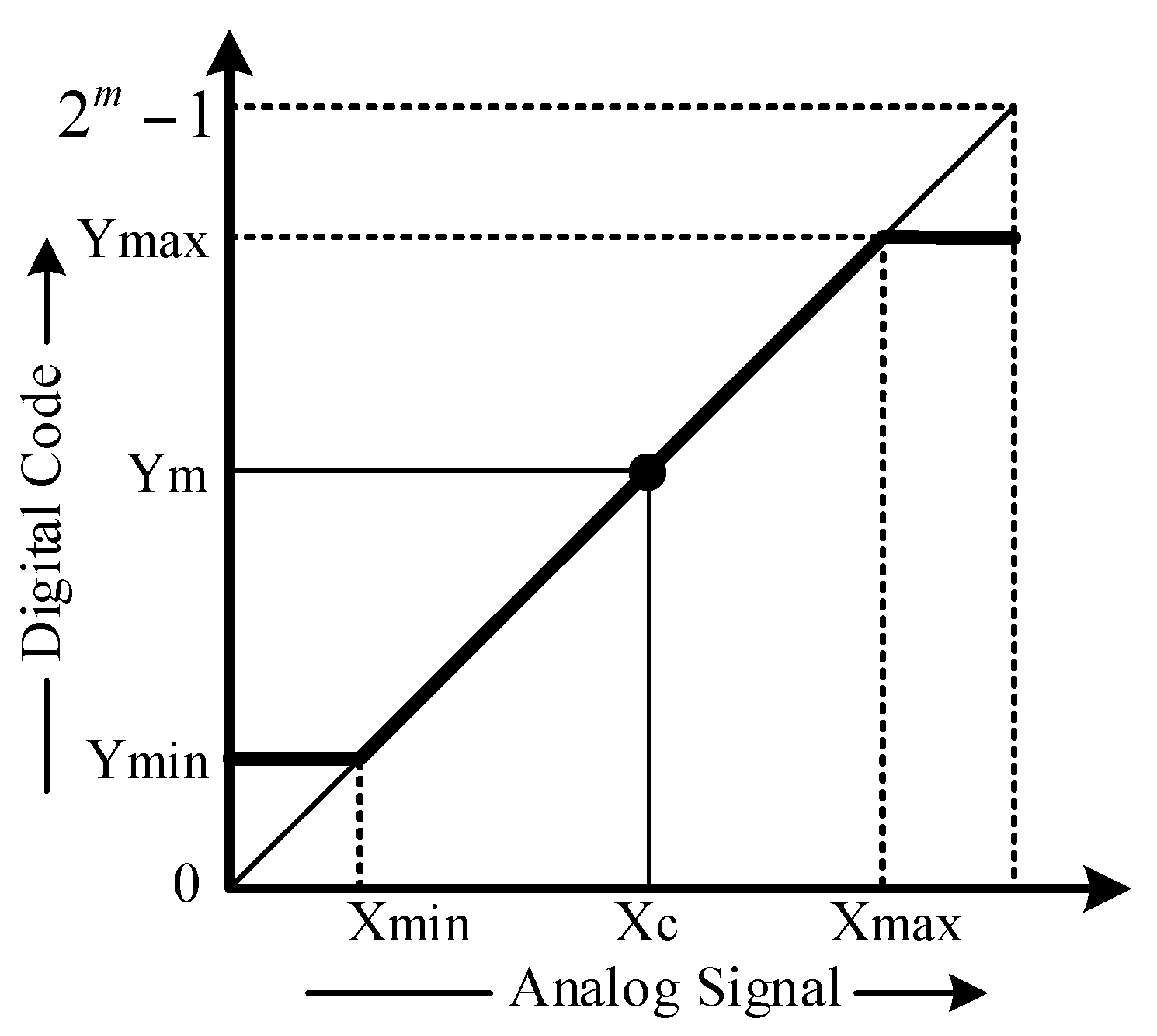
| Parameter | Pressure | Temperature |
|---|---|---|
| m | 14 | 10 |
| Ymax | 11 bar | 100 °C |
| Ymin | 1 bar | −40 °C |
| Xmax | 149 | 883 |
| Xmin | 15436 | 59 |
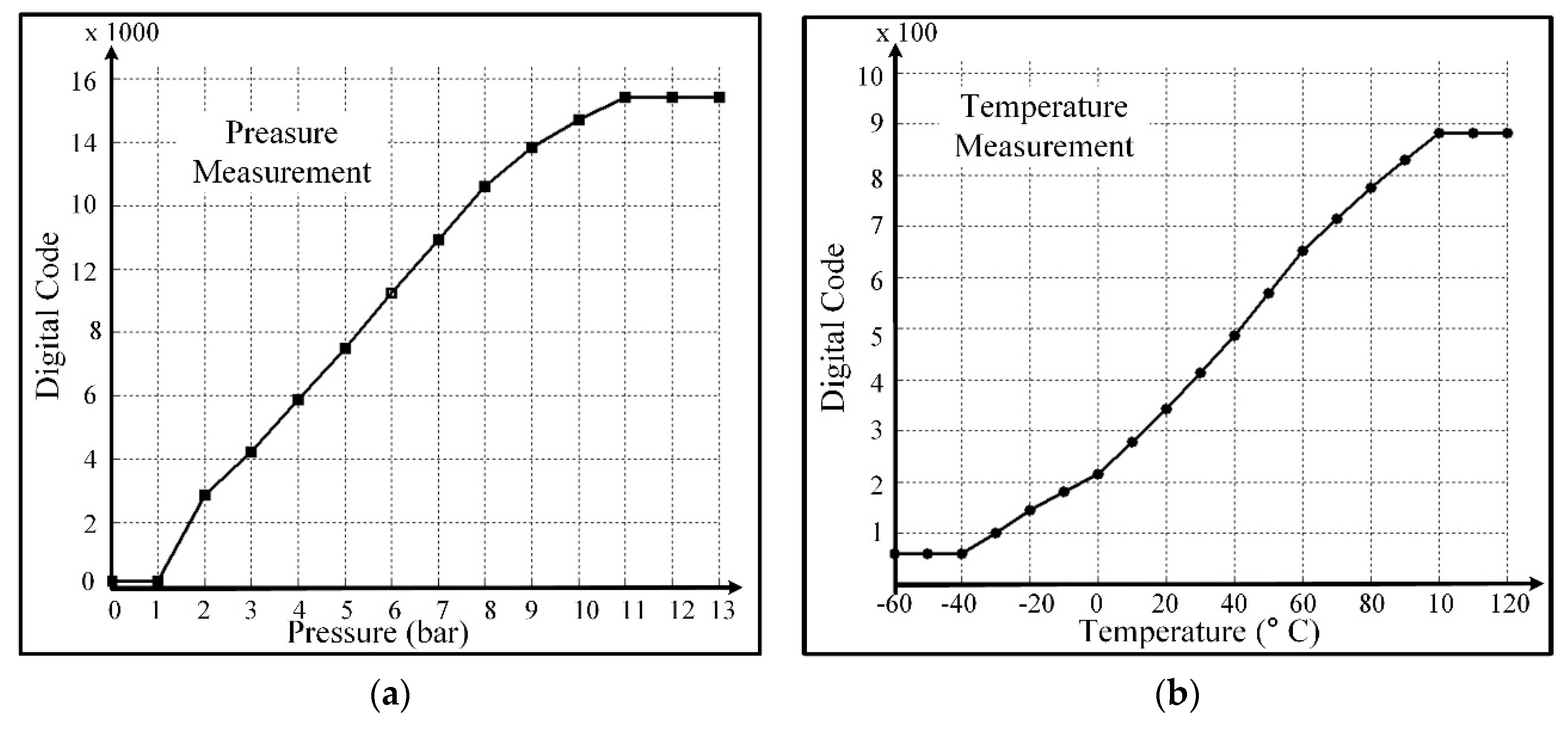
| Pressure | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| Code | 149 | 149 | 2852 | 4232 | 5883 | 7493 | 9228 |
| Pressure | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| Code | 10,919 | 12,626 | 13,855 | 14,646 | 15,436 | 15,436 | 15,436 |
| Temperature | −60 | −40 | −30 | −20 | −10 | 0 | 10 | 20 | 30 |
| Code | 59 | 59 | 101 | 144 | 180 | 216 | 279 | 342 | 414 |
| Temperature | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 |
| Code | 486 | 569 | 652 | 714 | 766 | 829 | 833 | 833 | 833 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, I.; Rikhan, B.S.; Kim, D.-G.; Lee, D.-S.; Rehman, M.R.U.; Abbasizadeh, H.; Asif, M.; Lee, M.; Hwang, K.C.; Yang, Y.; et al. Design of a Low-Power, Small-Area AEC-Q100-Compliant SENT Transmitter in Signal Conditioning IC for Automotive Pressure and Temperature Complex Sensors in 180 Nm CMOS Technology. Sensors 2018, 18, 1555. https://doi.org/10.3390/s18051555
Ali I, Rikhan BS, Kim D-G, Lee D-S, Rehman MRU, Abbasizadeh H, Asif M, Lee M, Hwang KC, Yang Y, et al. Design of a Low-Power, Small-Area AEC-Q100-Compliant SENT Transmitter in Signal Conditioning IC for Automotive Pressure and Temperature Complex Sensors in 180 Nm CMOS Technology. Sensors. 2018; 18(5):1555. https://doi.org/10.3390/s18051555
Chicago/Turabian StyleAli, Imran, Behnam Samadpoor Rikhan, Dong-Gyu Kim, Dong-Soo Lee, Muhammad Riaz Ur Rehman, Hamed Abbasizadeh, Muhammad Asif, Minjae Lee, Keum Cheol Hwang, Youngoo Yang, and et al. 2018. "Design of a Low-Power, Small-Area AEC-Q100-Compliant SENT Transmitter in Signal Conditioning IC for Automotive Pressure and Temperature Complex Sensors in 180 Nm CMOS Technology" Sensors 18, no. 5: 1555. https://doi.org/10.3390/s18051555
APA StyleAli, I., Rikhan, B. S., Kim, D.-G., Lee, D.-S., Rehman, M. R. U., Abbasizadeh, H., Asif, M., Lee, M., Hwang, K. C., Yang, Y., & Lee, K.-Y. (2018). Design of a Low-Power, Small-Area AEC-Q100-Compliant SENT Transmitter in Signal Conditioning IC for Automotive Pressure and Temperature Complex Sensors in 180 Nm CMOS Technology. Sensors, 18(5), 1555. https://doi.org/10.3390/s18051555