Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation





Abstract
:1. Introduction
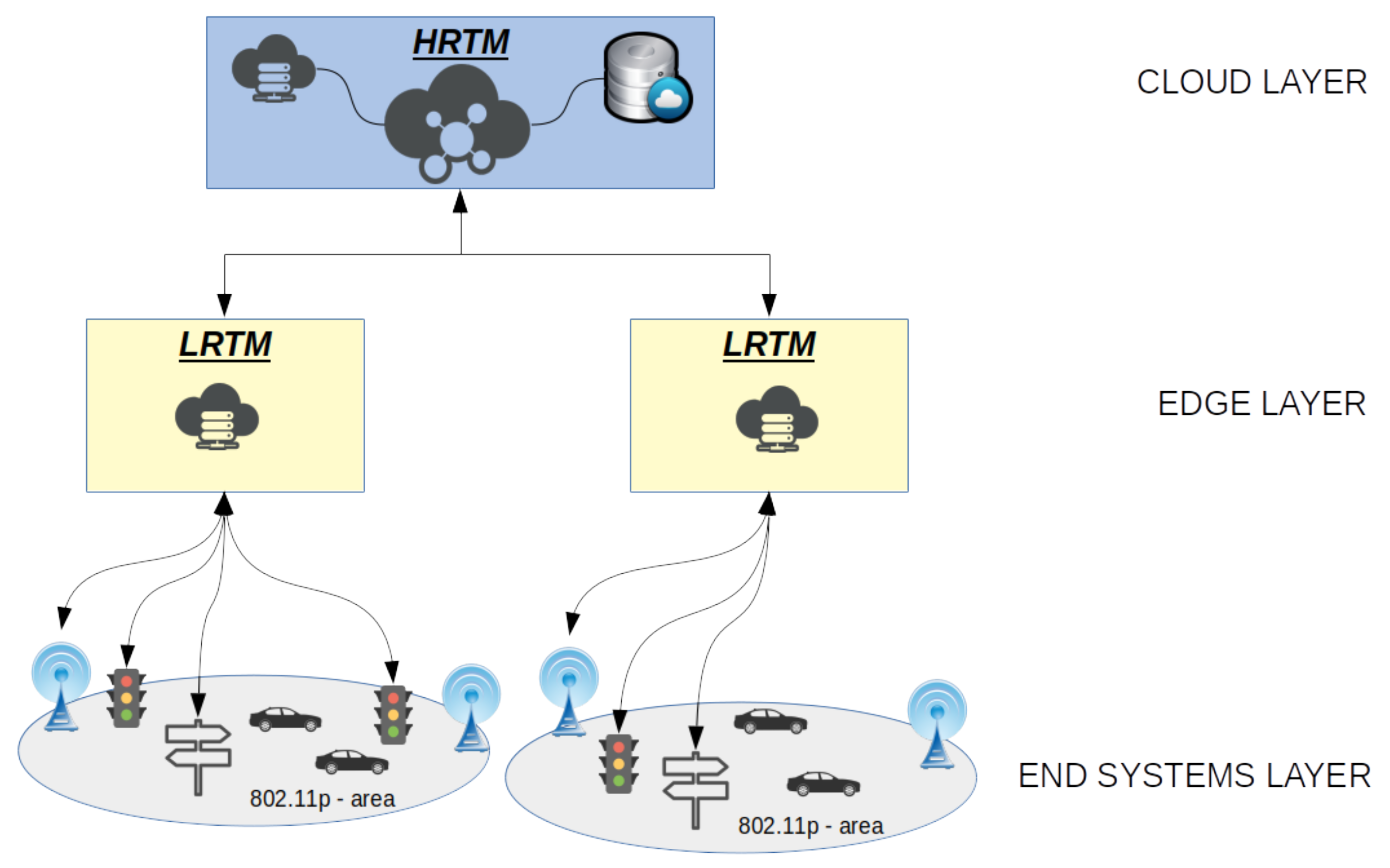
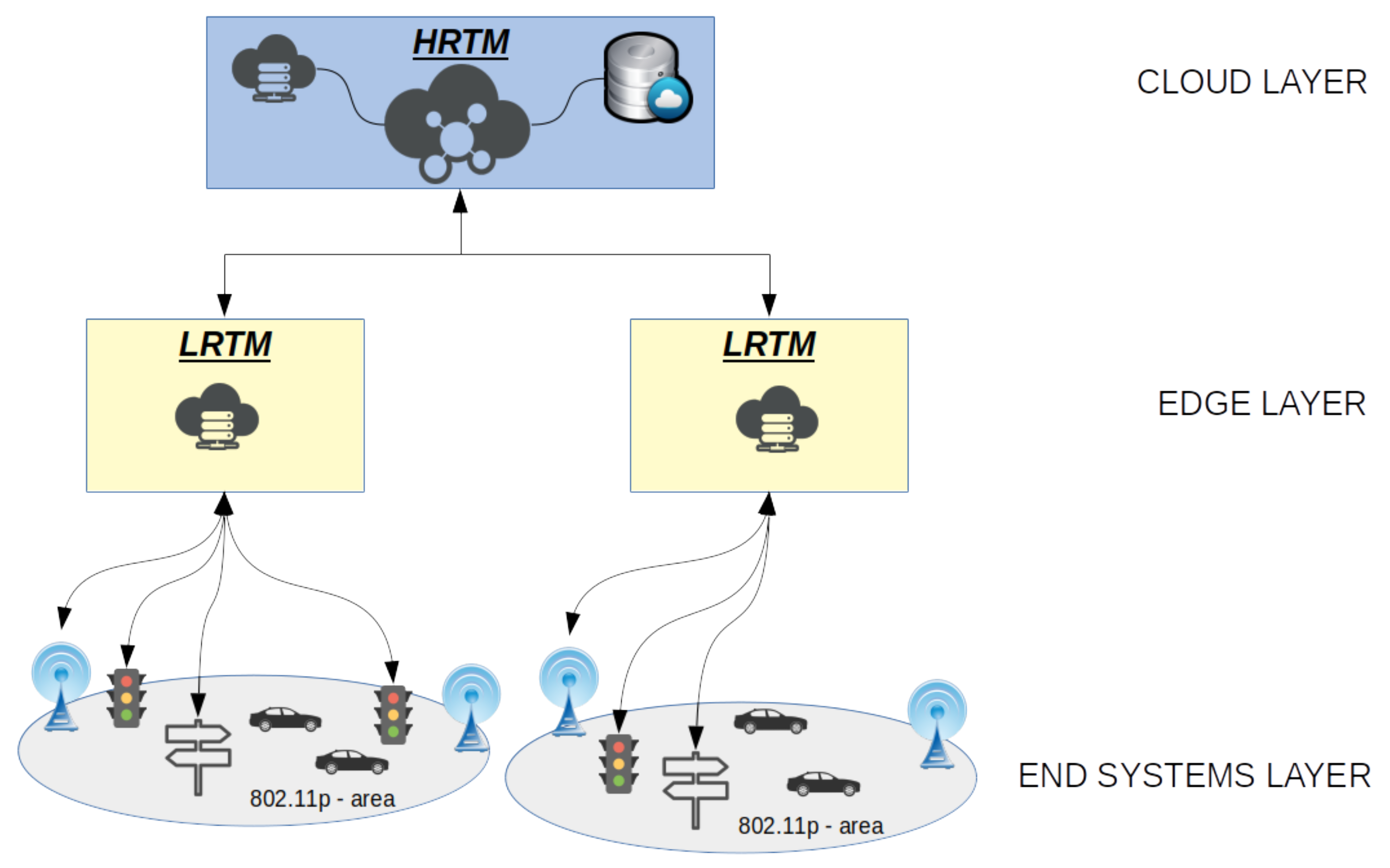
- A new layered architecture is proposed in order to manage dangerous situations (e.g., emergencies or accidents) in VANETs environments; in particular, it is designed an architecture composed of three layers: cloud layer (for global management), edge layer (for local and distributed management) and end system layer for heterogeneous technology integration;
- Some new messages for 802.11p have been defined to support the new scalable architectures;
- Some novel metrics have been considered in the VANET network assimilated to a graph structure;
- Several simulation campaigns have been extensively carried out to show the effectiveness of the architecture, protocols and adopted metrics in terms of traffic re-distribution and traveling time reduction.
2. Related Work
3. Architecture and Communication Protocol
3.1. Proposed Architecture
3.1.1. Cloud Layer
3.1.2. Edge Layer
3.1.3. End System Layer
- The vehicular layer is composed of VANET devices such as OBUs and RSUs. This layer is reachable by exploiting the capability of RSUs to communicate with other VANET devices, but it is also able to communicate with external networks. This layer is used to acquire data on traffic and road status by monitoring flows: data is then filtered and aggregated by LRTM and sent to HRTM;
- The traffic controller layer is composed of smart devices such as traffic lights and road signs that have been improved by equipping them with an elaboration unit. It allows devices to communicate with other layers (to actuate decisions made by LRTM or HRTM layers).
3.2. Protocol Communications
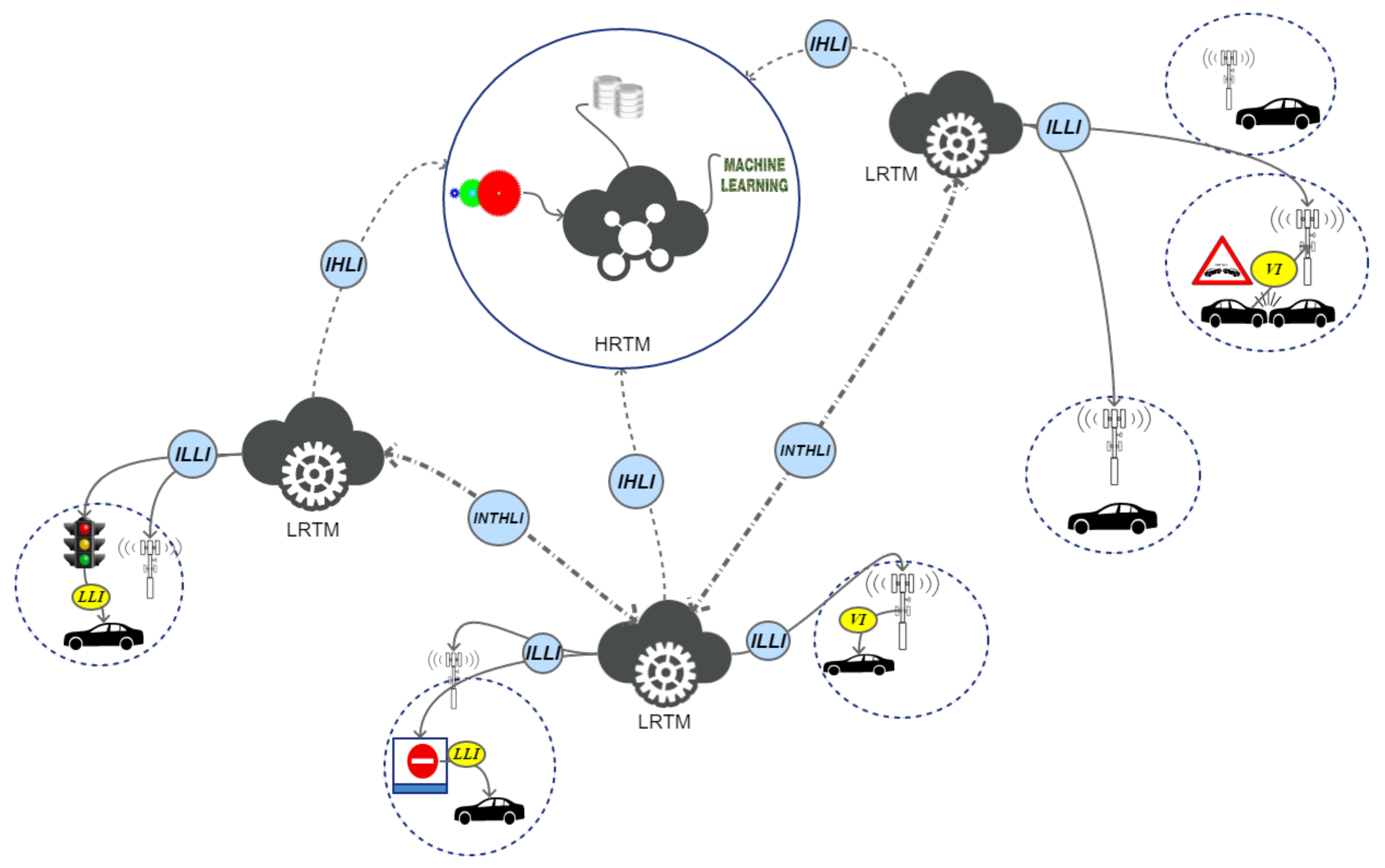
- Inter-High-Layer Interface (IHLI): it defines rules for exchanging data between HRTM and LRTM layers;
- Intra-High-Layer Interface (INTHLI): This interface provides communication among LRTM systems;
- Inter-Low-Layer Interface (ILLI): it is used to exchange data between LRTM and RSUs, smart traffic lights and smart road signs;
- VANET Interface (VI): it is used by RSUs to communicate between them and to implement the V2V and V2I communication protocol;
- Low Layer Interface (LLI): it is used to allow communication between smart road elements and vehicles. These communications are useful for the whole system because of the vehicle flow monitoring.
3.2.1. Message Definition
3.2.2. Main Protocol Messages
3.2.3. Low Layer Protocol Messages
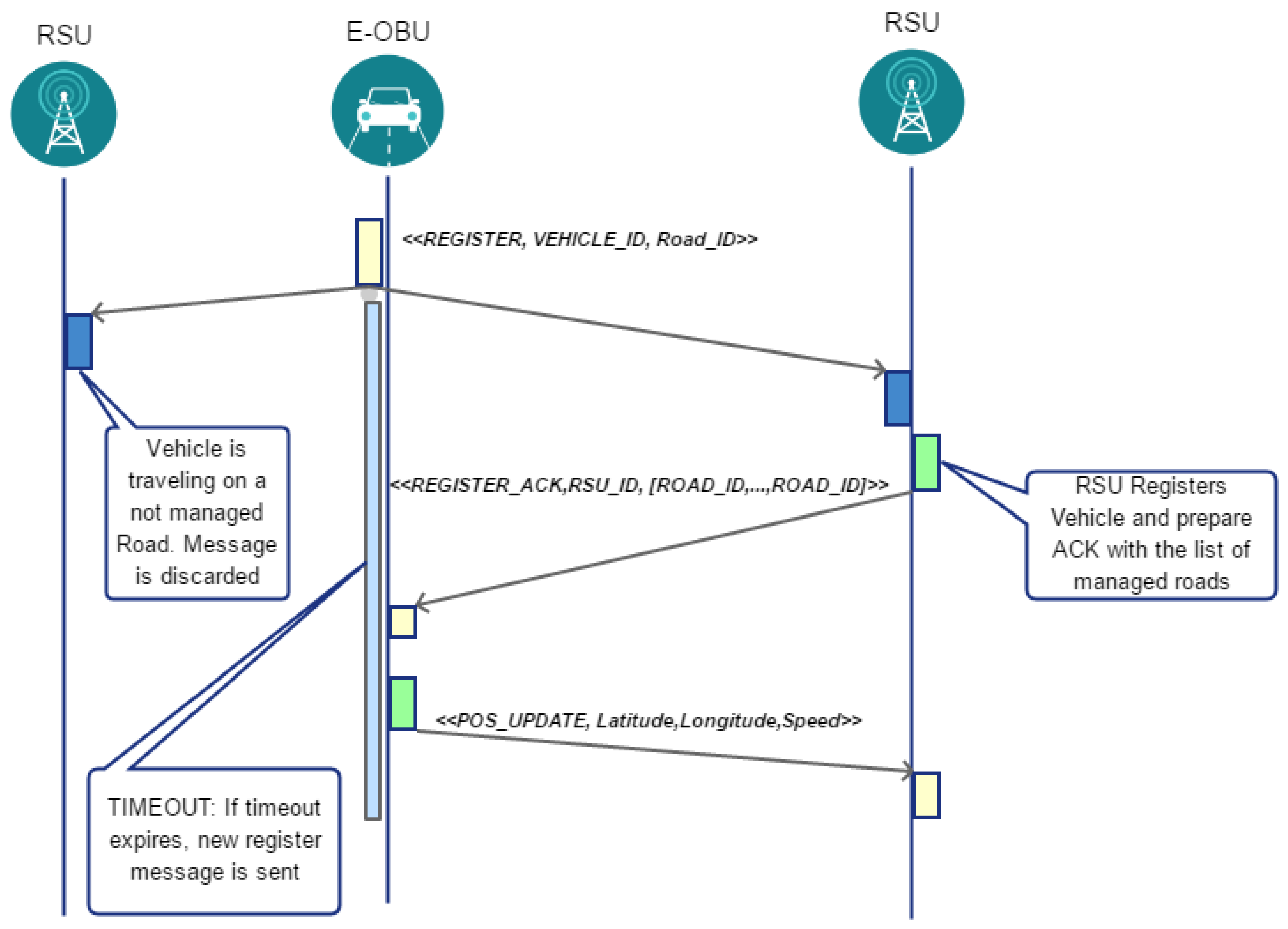
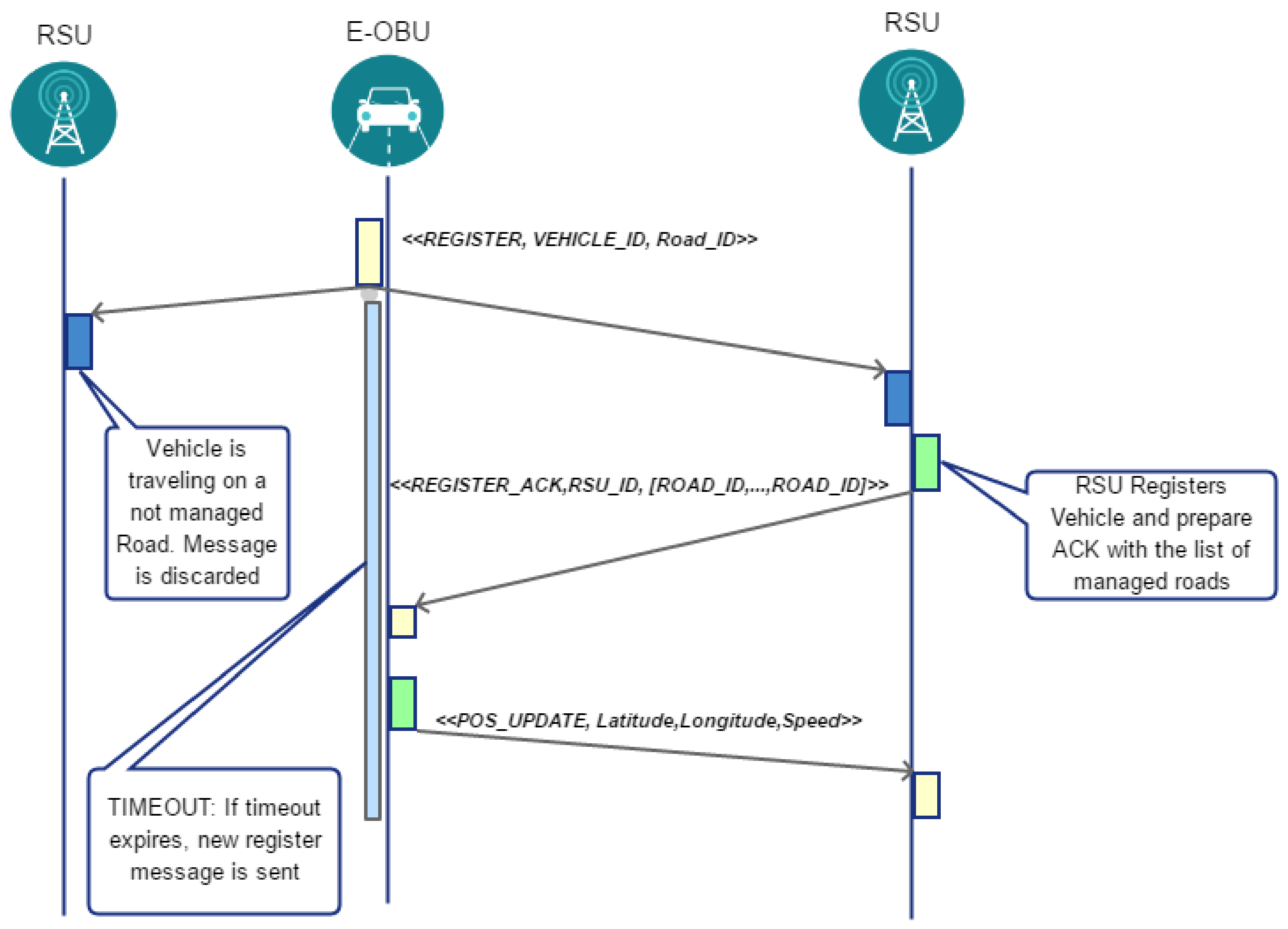
- Register Message: this message is sent by vehicle towards RSUs once it changes Road_ID. Once it is received by RSU, it registers the vehicle_ID in the reachable car list if and only if the vehicle is passing though a managed Road_Id. RSU sends back a Register Acknowledgment that contains data about managed road; The RSU discards register message if vehicle that has generated message is not passing on managed Road_Id.
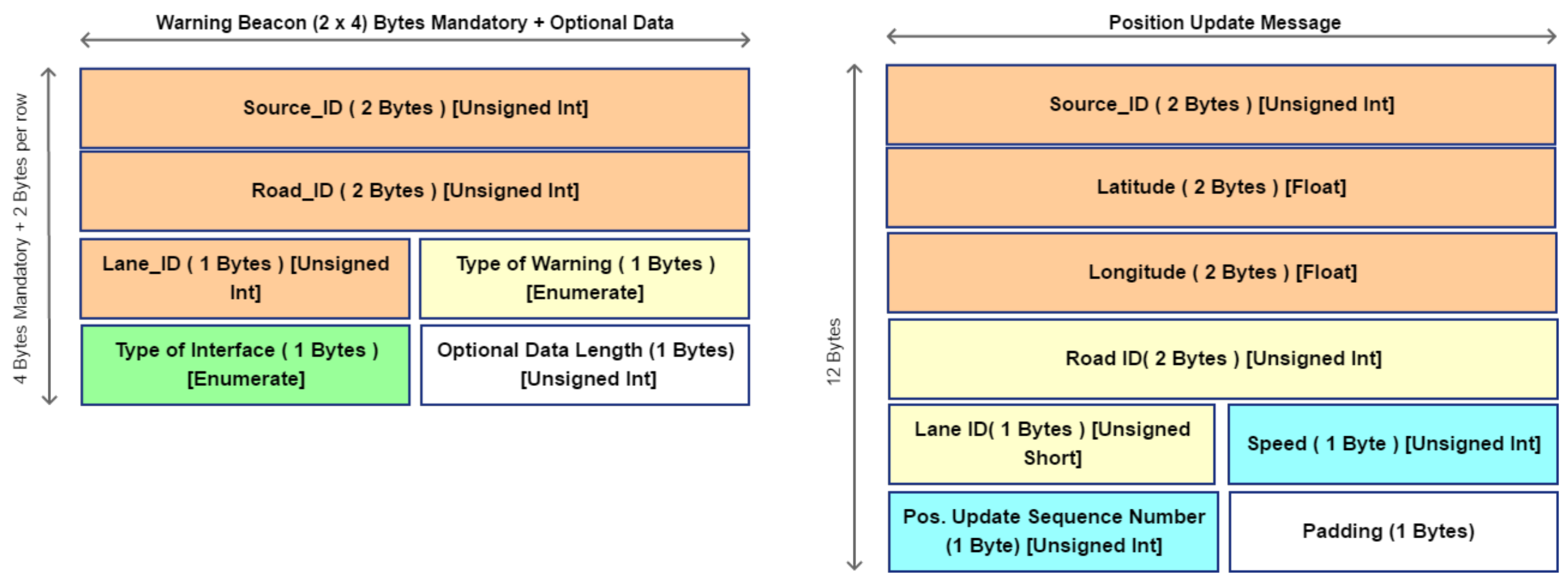
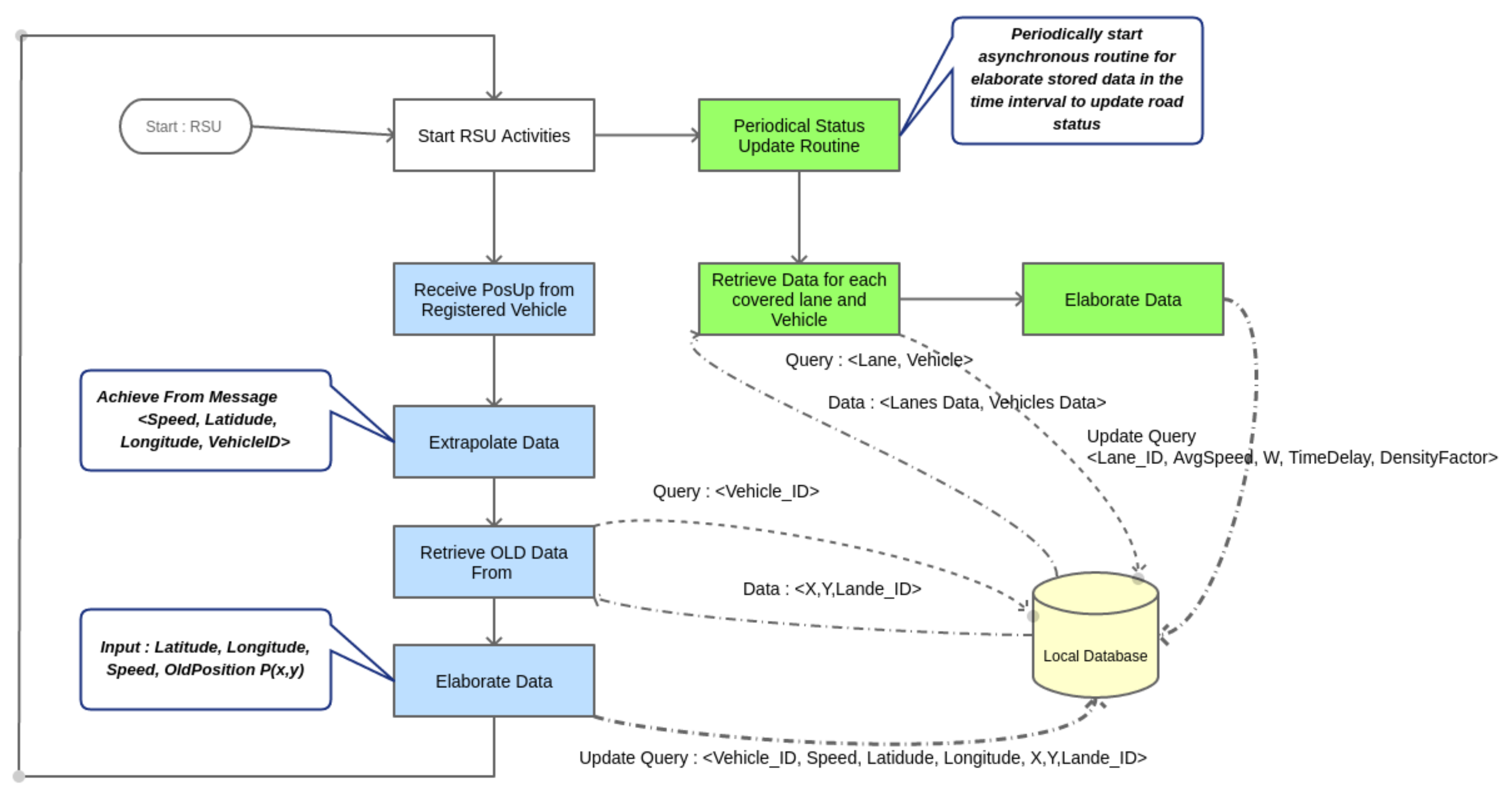
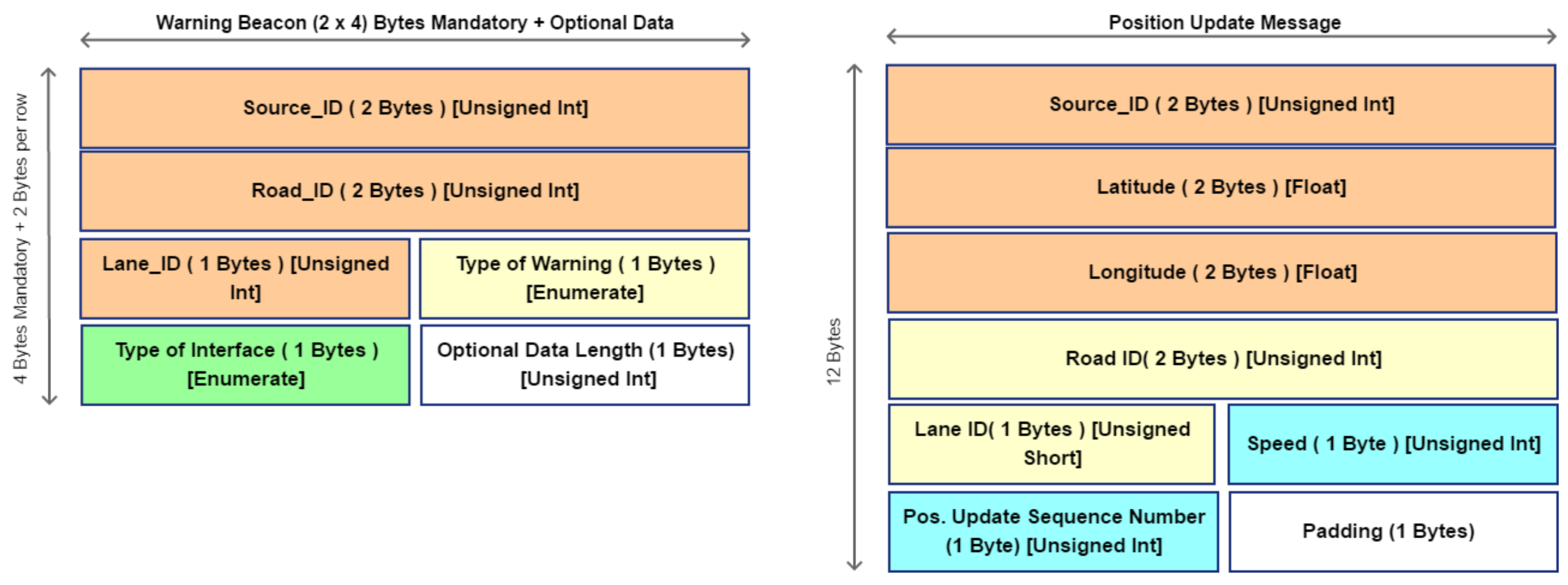
- POSition Update (POSUP): each node manages its own neighbor list by receiving the periodical POSUP message. It is sent by each vehicle once the position and current speed are acquired by inner sensors. Destination nodes are the neighbors of vehicle and lead RSU. Its dissemination is bounded to one hop and it is composed as shown in Figure 6. When a POSUP message is received by a RSU, it elaborates vehicle position and places it in the related lane queue of the road. In Table 1 it is possible to view its fields specification.
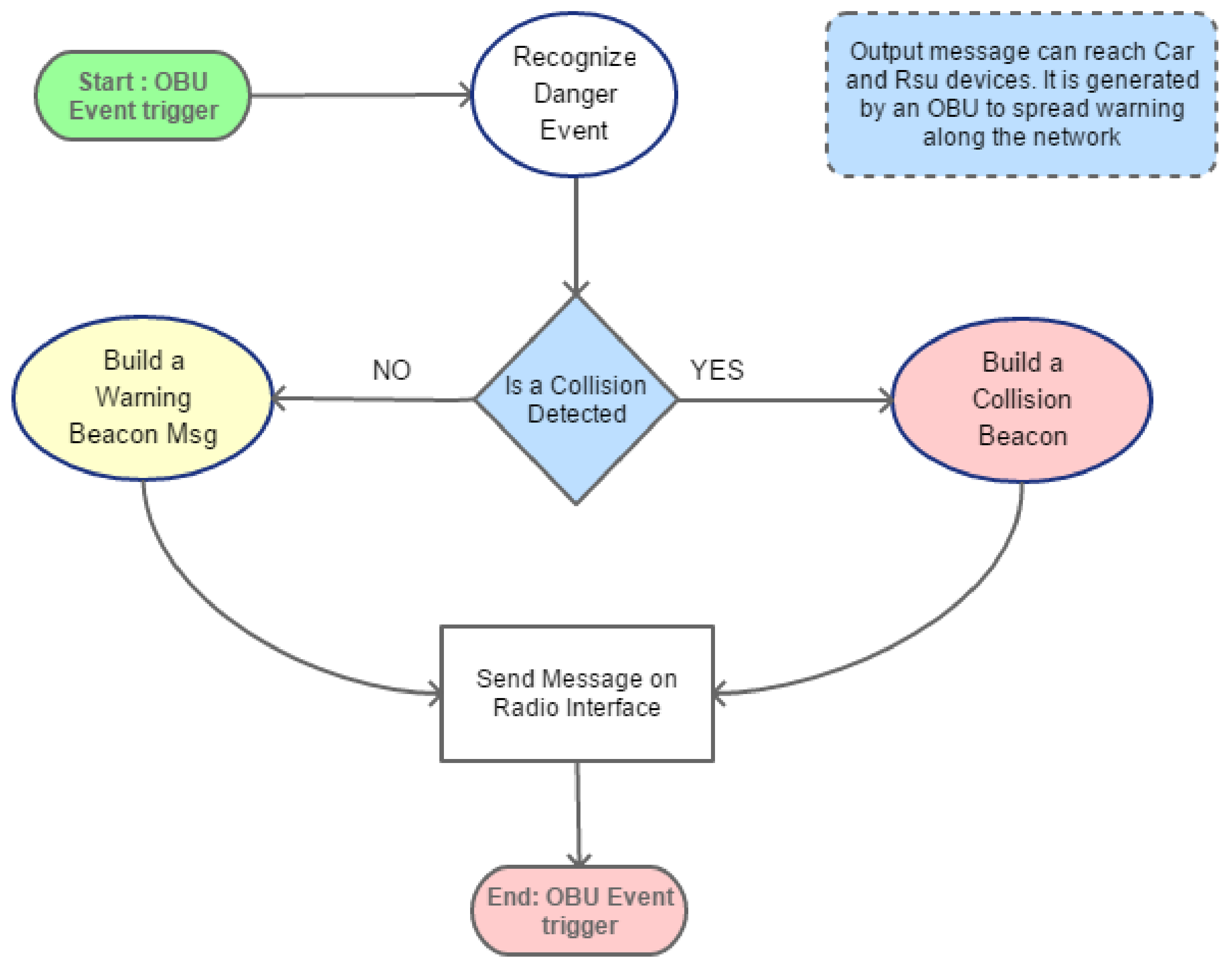
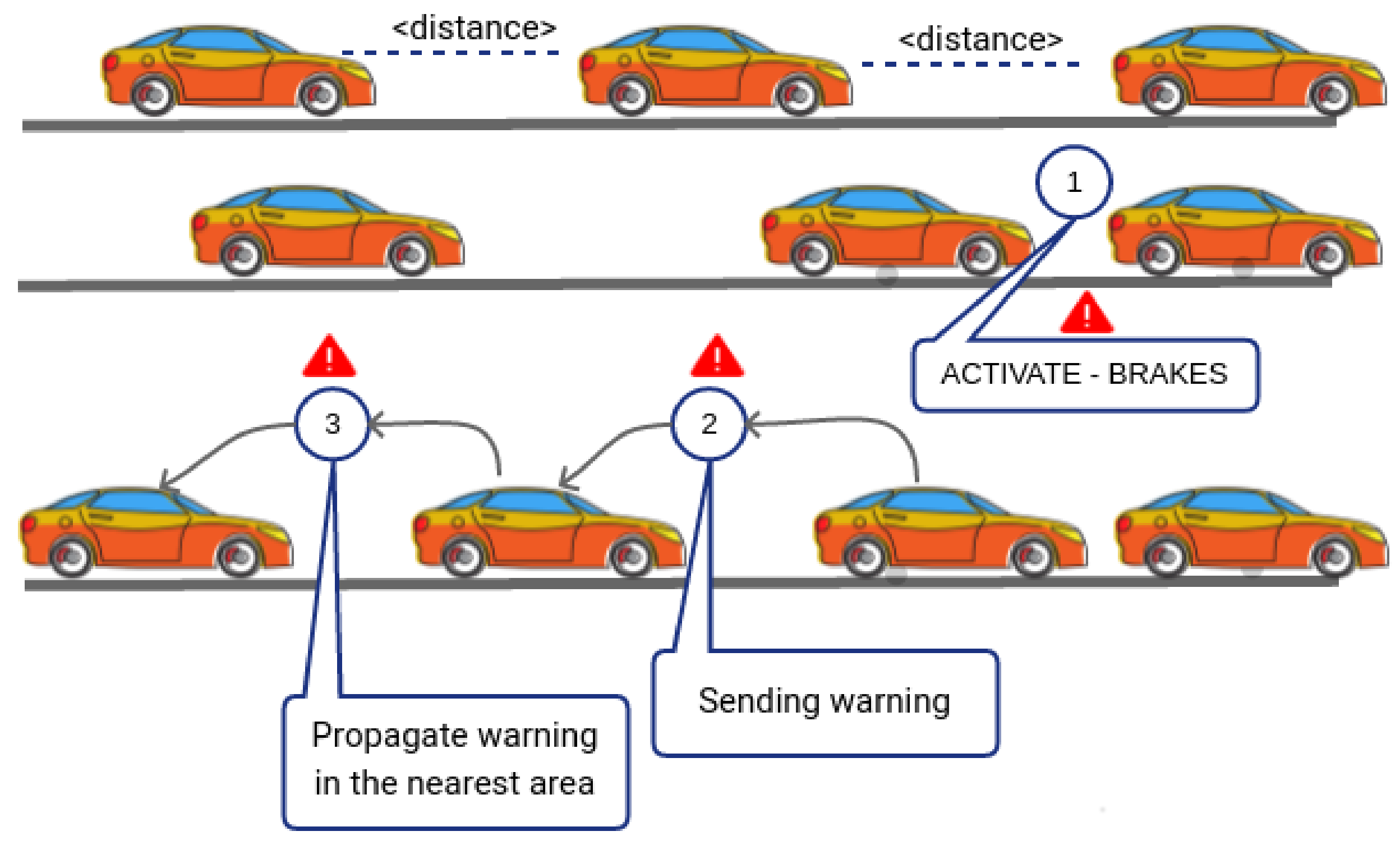
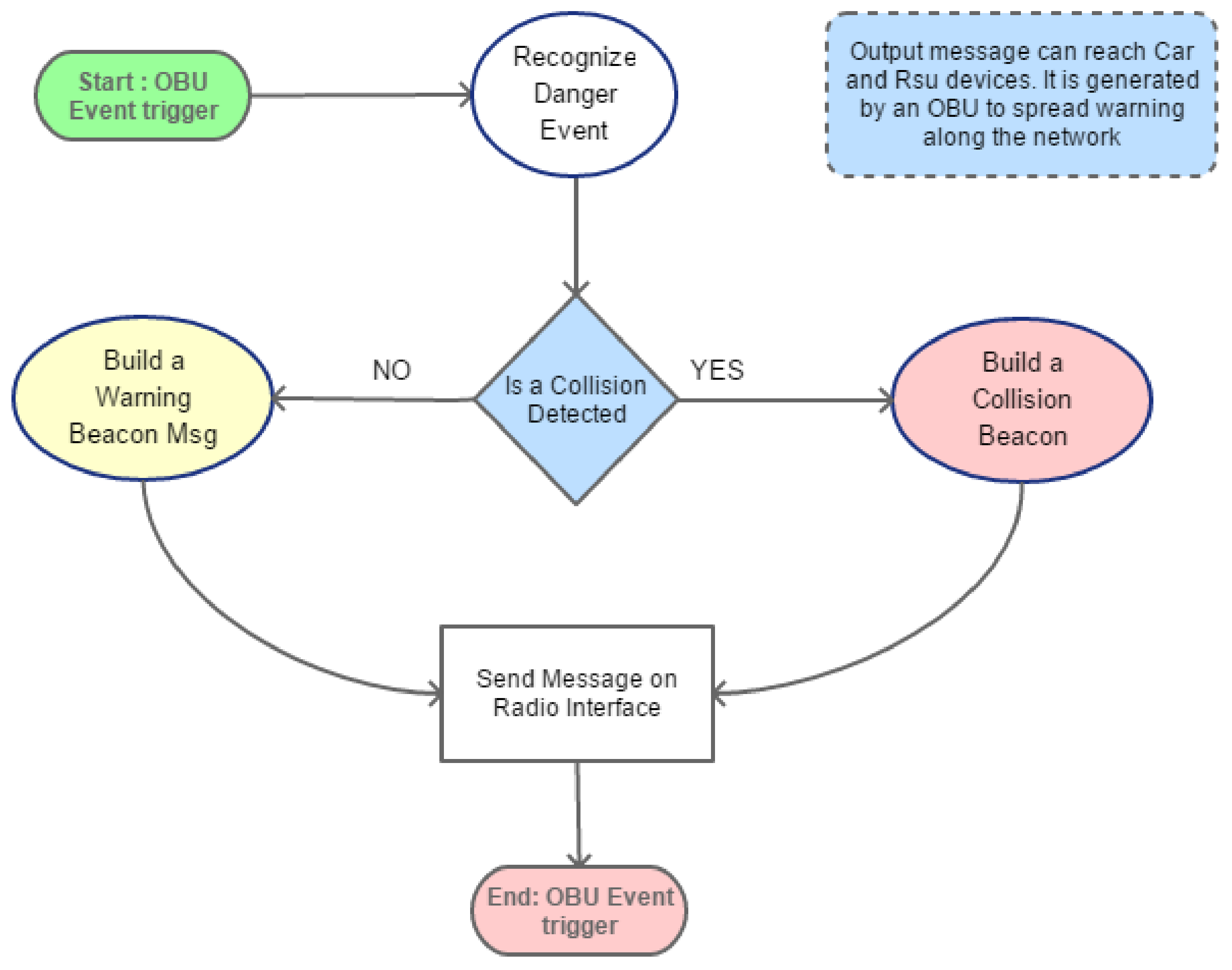
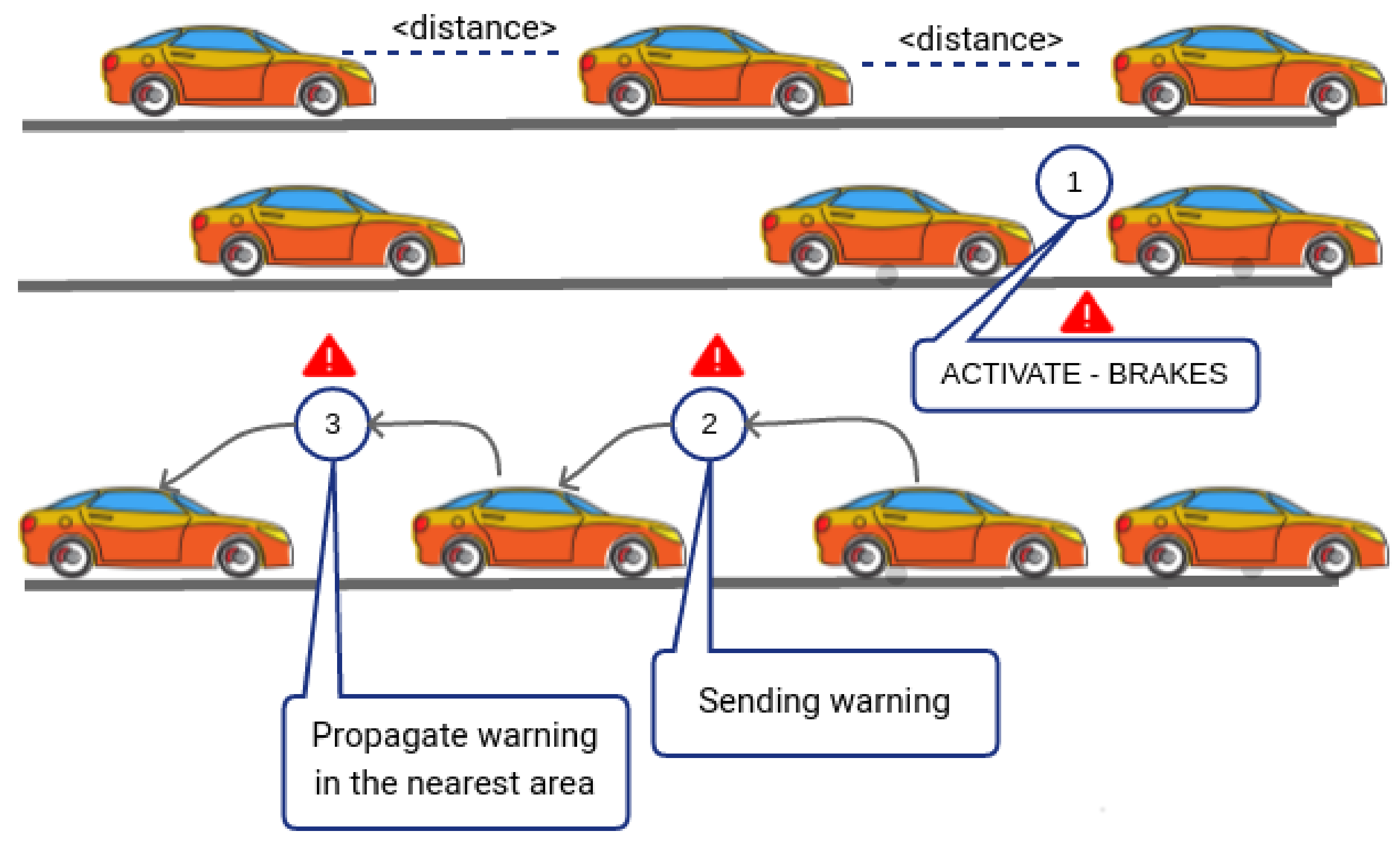
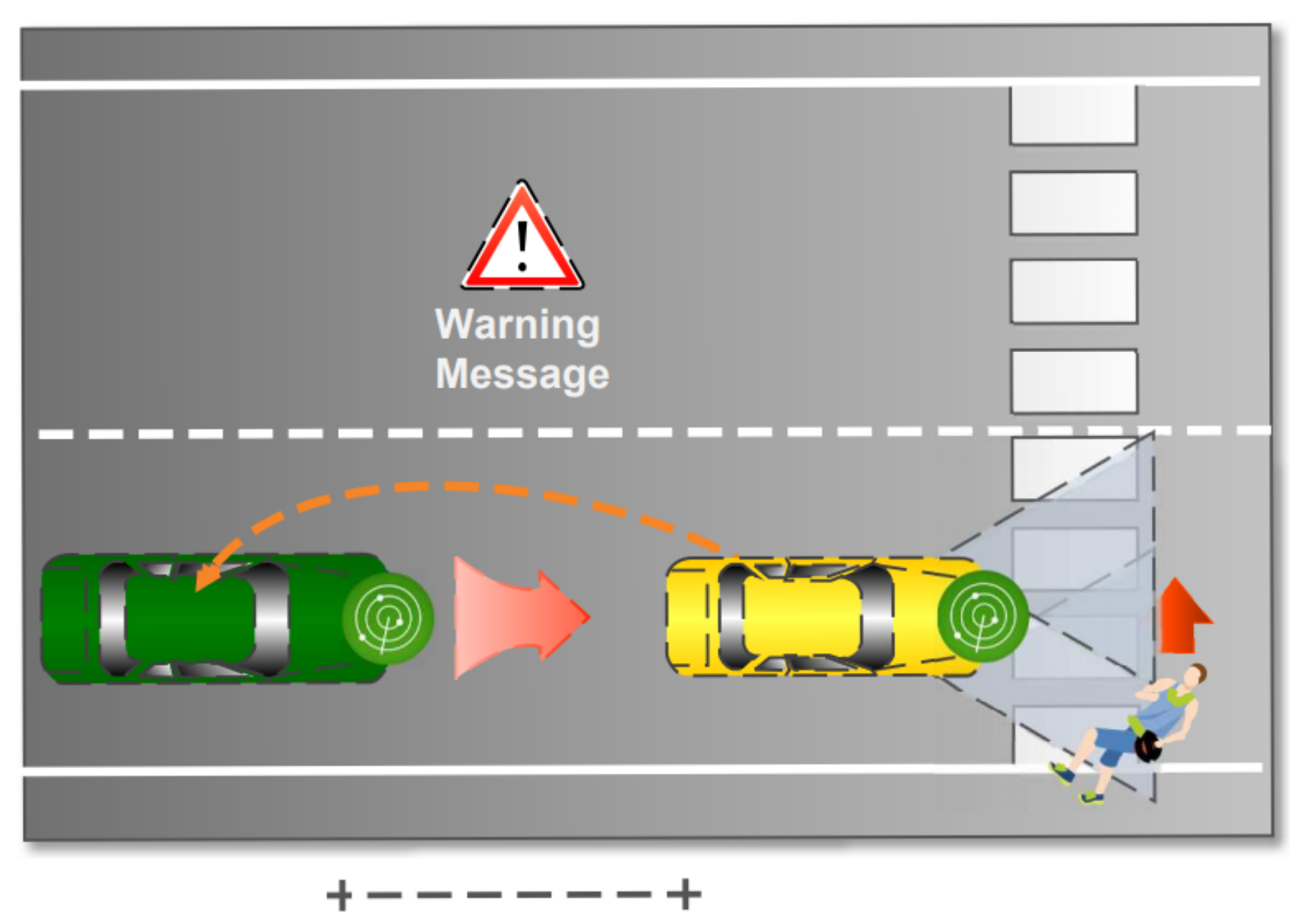
- Warning Message: It is sent by vehicles in the network when something happens during their journey. For example, when a critical situation is recognized by E-OBU by elaborating sensor data. Here two types of warning messages have been considered: Warning Beacon (WB) and Collision Beacon (CB). Let us describe in detail how these messages are composed. In Figure 6 the WB message is depicted. Beacon is encapsulated in the WSM Data field of WSM packet. Its length is 8 bytes composed of mandatory fields plus other optional rows of 2 bytes length. Their number is signaled in a specified mandatory field (see Table 2). The vehicle elaborates dangerous events as shown in Figure 7.
3.2.4. High Layer Protocol Messages
- Hello Message (HM): it is sent between LRTMs and HRTM when a LRTM node starts to work. In order to keep updated the list of active LRTM, this message is sent periodically by exploiting the IHLI interfaces;
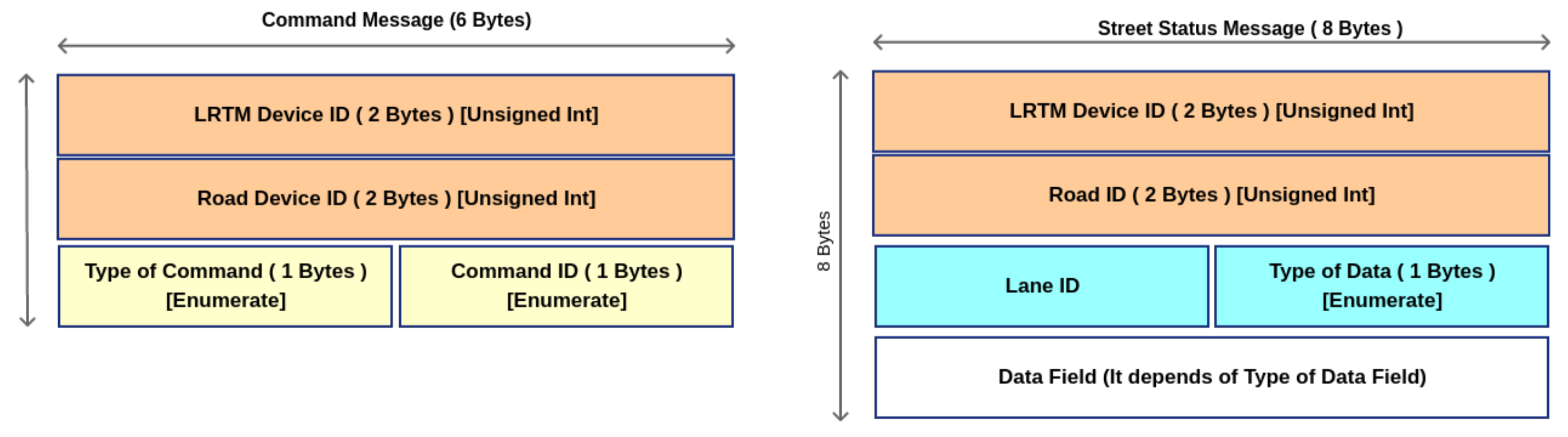
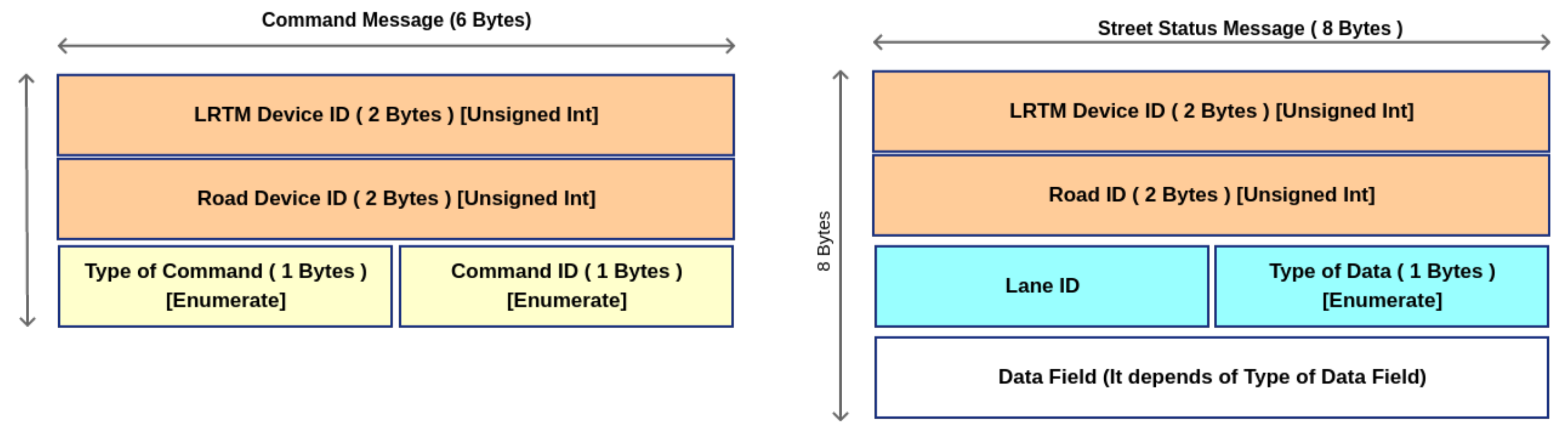
- The Command Message (CmdMsg): it is one of the most important messages and its main goal is to inform road smart device to make an actuation such as activate a gate control to deny or allow access in a controlled area or by acting on city street lights to change their timing and so on. It is composed as shown in Figure 8. It is sent towards the IHLI and ILLI interfaces as shown in Figure 2; This message is generated by HRTM and LRTM to actuate traffic policies.
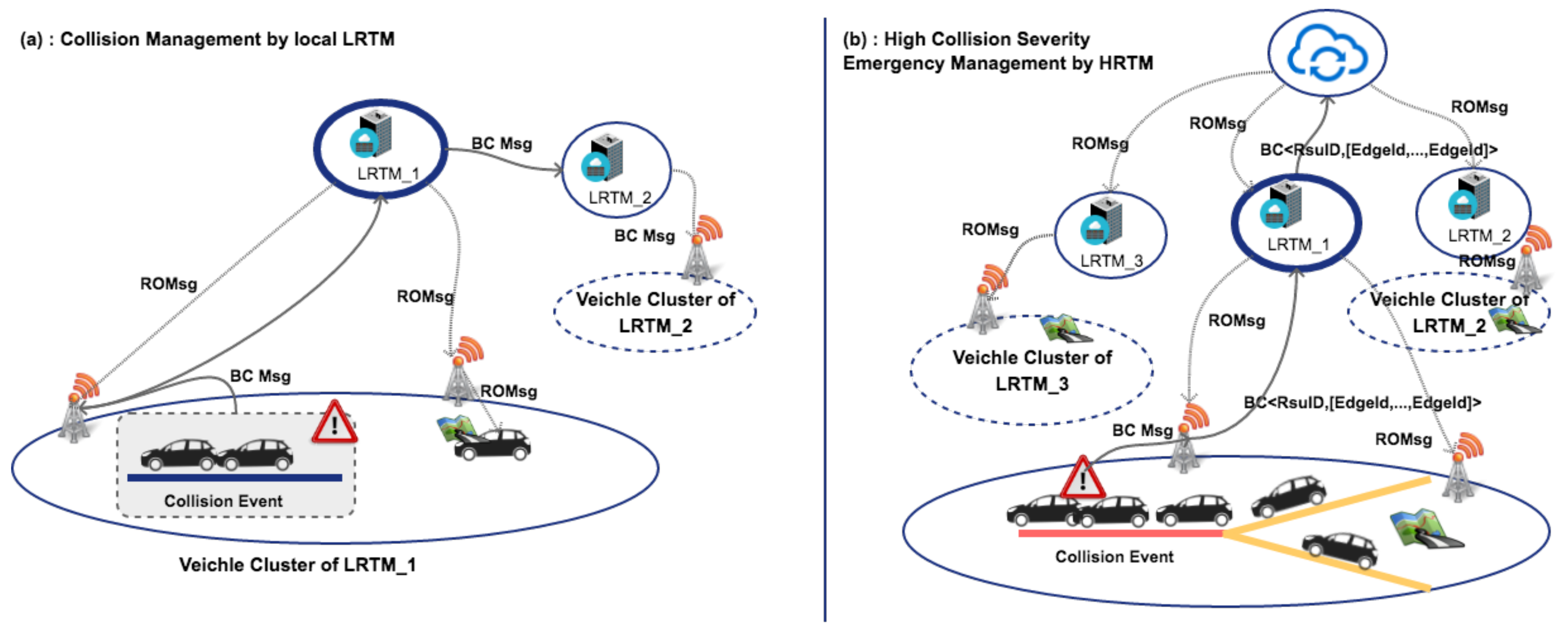
- The Collision Beacon (CB): it is utilized by vehicles to inform LRTM about a happened collision. Moreover, the LRTMs uses this messages to inform one-hop LRTMs about this event. This message is then forwarded by LRTMs to covered vehicles as Warning Message as already described in Figure 6. BC message is composed of two main fields: RSU_ID (the ID of the RSU device) and Lane_ID (the ID of the lane segment);
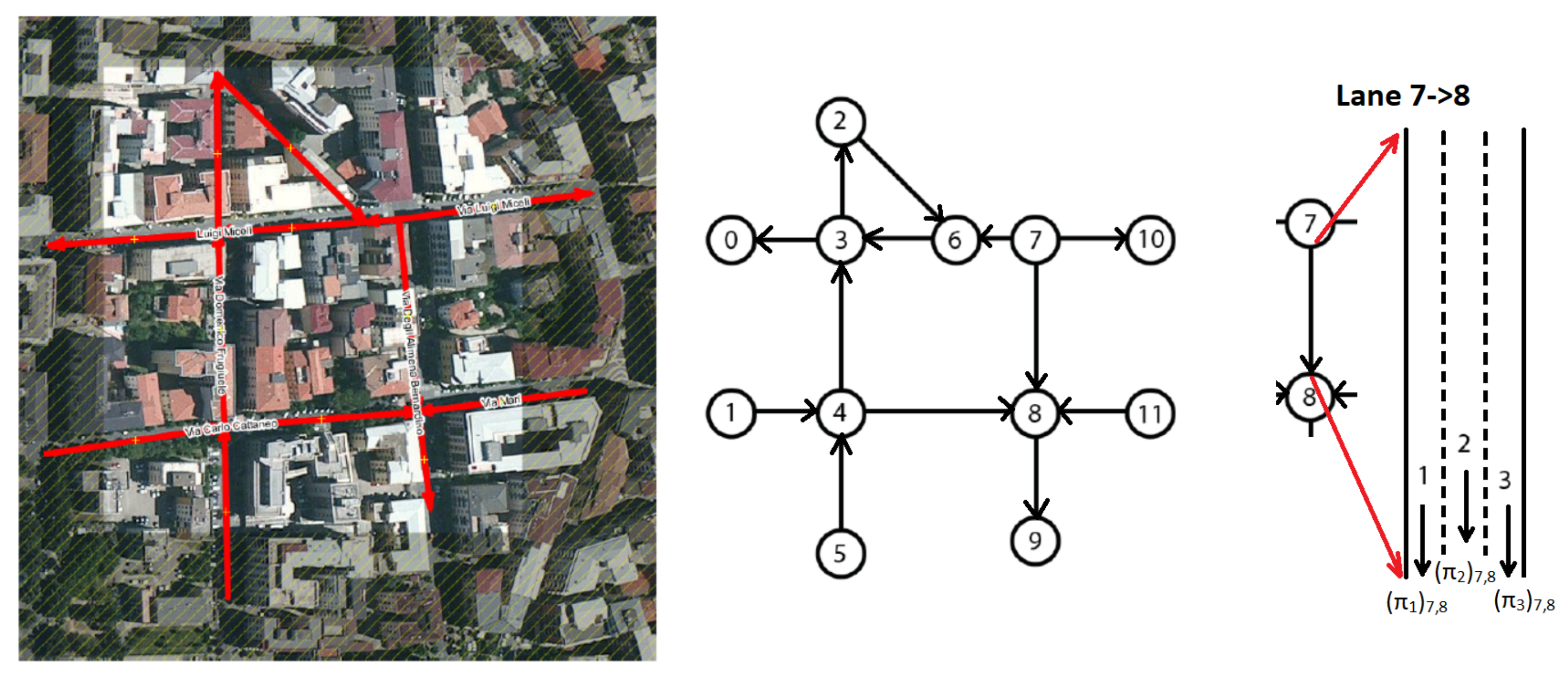
- Street Status Message (StrStsMsg): it is sent between LRTMs and HRTM. This message is used for updating the status of the covered roads and to bring up data to HRTM. Low Road Traffic Manager (LRTM) collects information from lower layers and aggregates data. Periodically these data are reported to the higher layer to update roads status globally at the end of an observation window. The message is composed as shown in Figure 8. Here Type of Data Field can be Inhibit or Update. In case of Inhibit message data fields shall not be taken into consideration, otherwise, if the value is set to Update then data fields shall be composed of six bytes that means three float values. The first value represents the weight of the edge, which is called w, the second one shall be the density value called and the last one shall be the traveling delay in minutes called . These values will be evaluated by RSU locally as shown in Section 5.3.Table 3 specifies the contents of message. It reports three important values used to perform ITS choices in terms of traffic management. In particular, these parameters are referred to a specific lane of a specific road. The field gives us information about the vertexes of the edge to be considered, instead, the field gives us details about the order to recall the right edge. In fact, commonly the edge may be different of . Thus, the weight of lane in the global maps is represented by the weight of the edge called as well as the density factory called and delay term called .
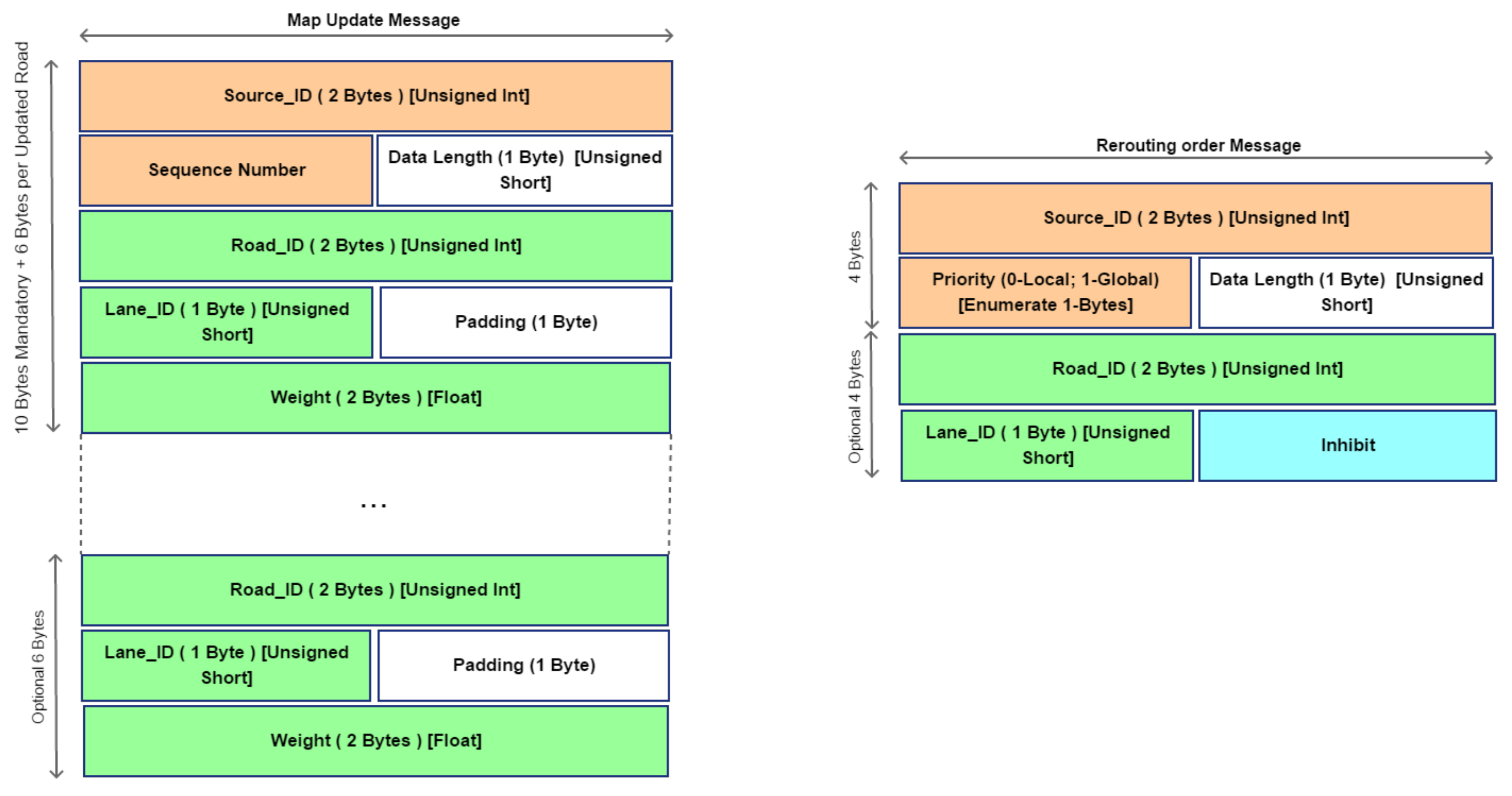
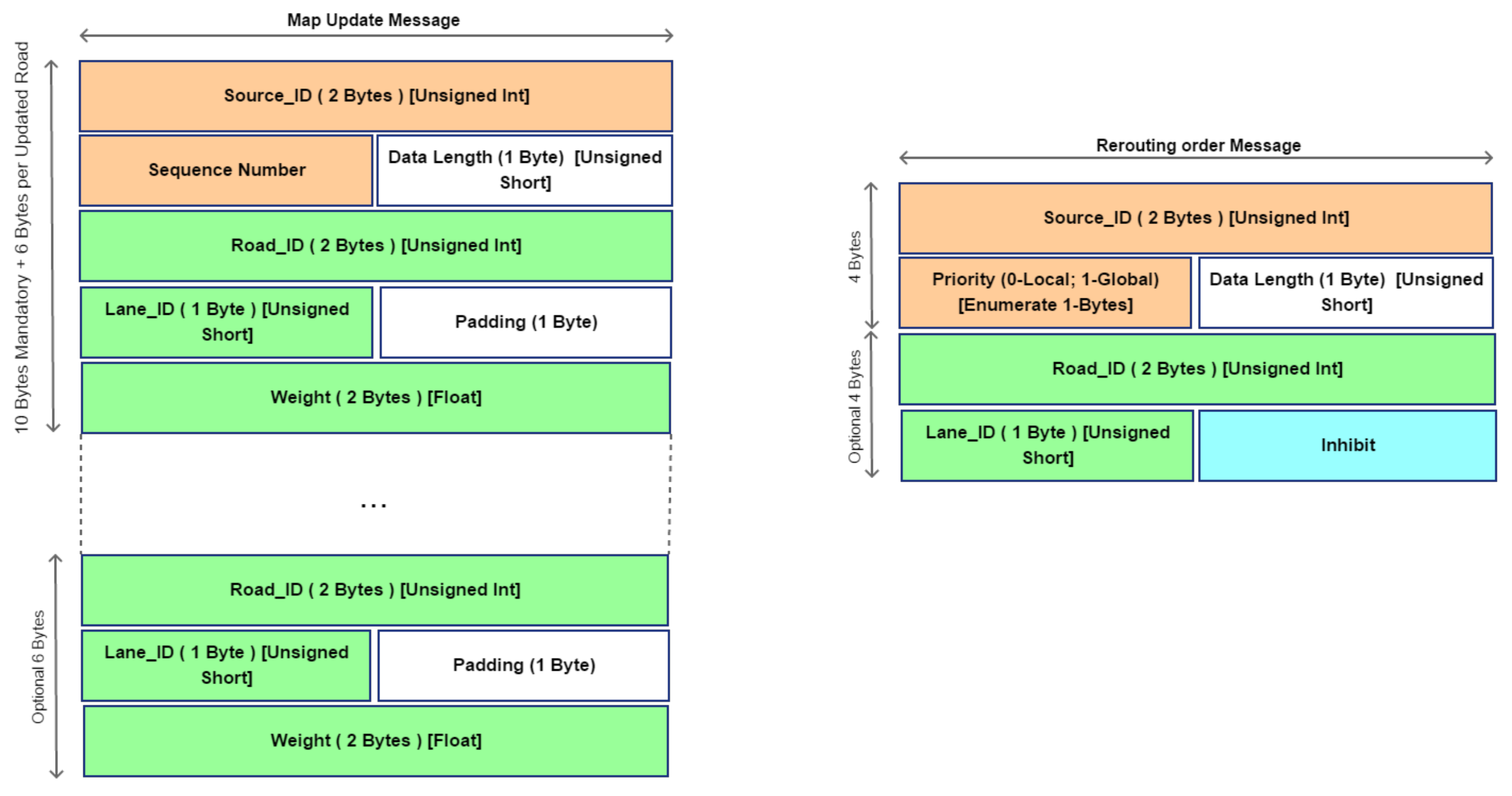
- Map Update Message (MapUpMsg): it is sent by HRTM to LRTMs periodically along the ILLI interface to allow LRTM to keep updated the weights of the covered roads. In this way vehicles can update their map to perform rerouting actions when triggered. More details are given in Figure 9. In this message, the data length field indicates the number of road information that message contains. The weight coefficient field, instead, reports the new weight coefficient for the related lane identified by the and fields.
- Rerouting Order Message (ROMsg): This message is generated by LRTMs. It sends ROMsgs through the LLI interface reaching RSUs. RSUs spread this message to vehicles. In order to limit flooding and saving resources, this message has two kinds of priority Global and Local. In case of Global Priority the message has been generated because of HRTM decisions. In this case, all vehicles will receive this message. In case of Local Priority only a limited set of vehicles will receive the message. This last set is composed of vehicles covered by LRTM area of interest. Message will change weights coefficient for some edges to follow LRTM or HRTM decisions. Once received, interested vehicles will evaluate an alternative path to reach their destinations. More details about message format are given in Figure 9. Here is reported the message format. In particular, on the basis of the value of the Priority field is possible to infer the information that message brings up. If the priority field is set to Global this means that the ROMsg is sent by HRTM to actuate a global rerouting. If the priority field, instead, is sent by LRTM this means that is valid only in the area of interest of the LRTM and the rerouting is made only by vehicles that are traveling in this area. Moreover, the content of the message includes also local policies made by LRTM about lanes interested by decision making policies.
3.2.5. Neighbor Vehicles for Short Range Advertisements
4. Vehicle On-Board Equipment
4.1. On-Board Unit (OBU)
4.2. Extended On-Board Unit (E-OBU)
5. Distributed ITS Tasks
5.1. Road Management
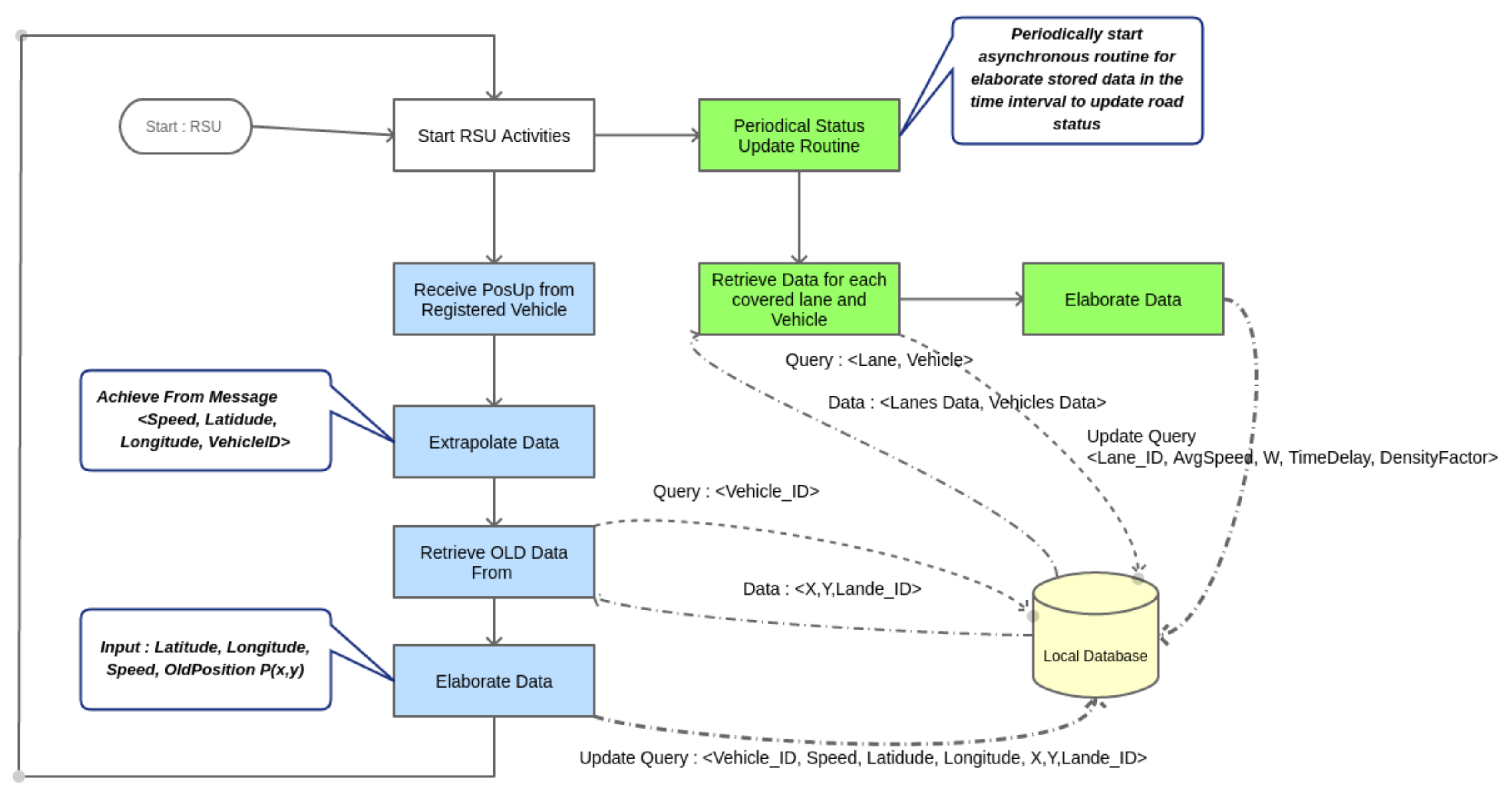
5.2. Road Monitoring
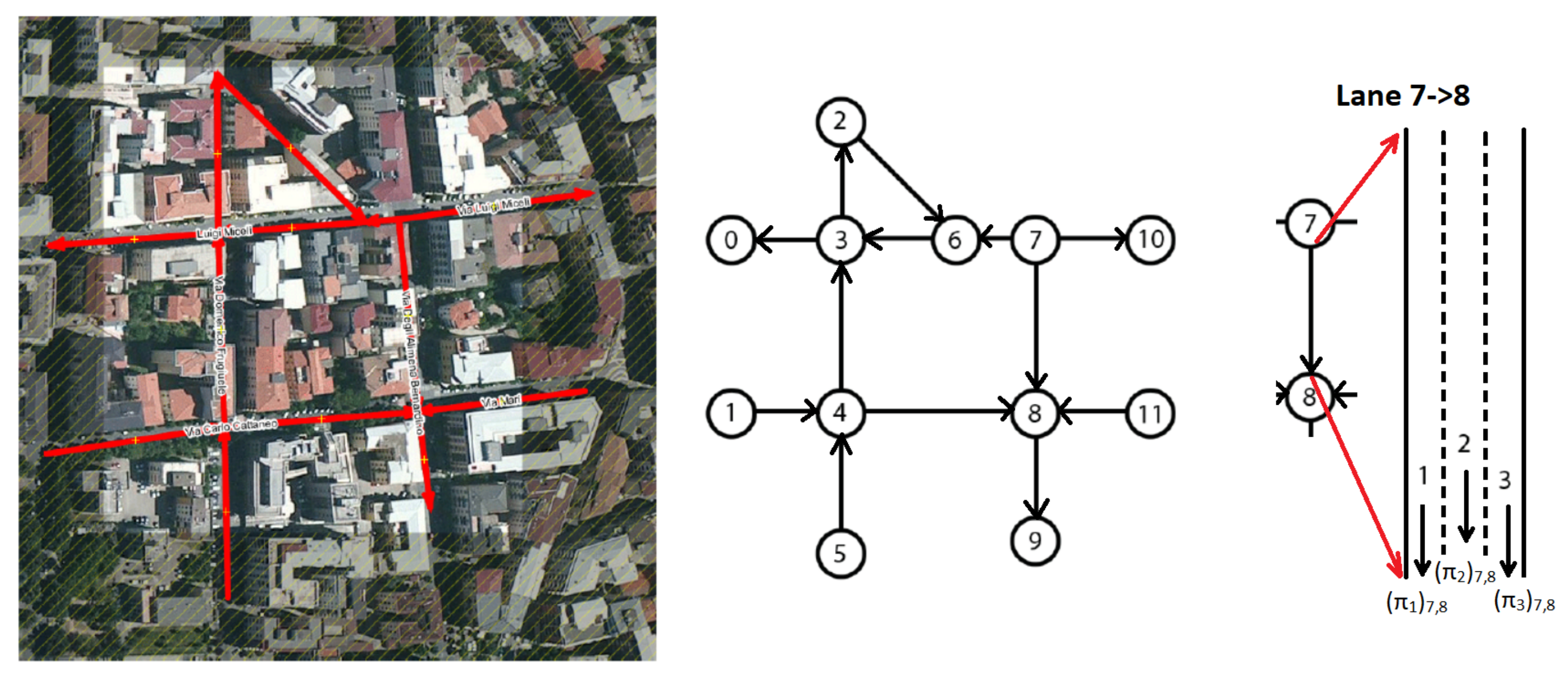
- : from latitude and longitude it is possible to evaluate the road_ID by simply applying the following steps. First convert latitude and longitude in the two dimensional plane. Once its achieved we can check if the point P(x,y) belongs to a given edge. Edges represent lanes’ road. We have to recall that it is possible to have normal roads with both directions available and one way roads. In this last case, for a right assignment of lane_ID we have to receive at least two POSUP messages for being able to evaluate vehicle direction. However, each lane is bounded by two vertexes that represent a cross roads or two segments junction as shown in Figure 12. Once the lane_ID is found we can update number of vehicles that are on the lane at the time t. In other words, is time dependent, but it is evaluated periodically: this means that represents a sample in a time interval of length t.
- : it is evaluated after the measure of and represents the density metric of the lane_ID . The higher is the value of density metric the higher is the probability to have congestion on the road and the higher is the time needed to pass through the lane.
- : it is the time measured for passing through the lane . It is given by the average value measured by vehicle that changes lanes in the time interval t. When the vehicle enters in a lane LRTM devices store the entering time in the local database.
5.3. Data Management
6. Performance Evaluation
6.1. Simulations Environment
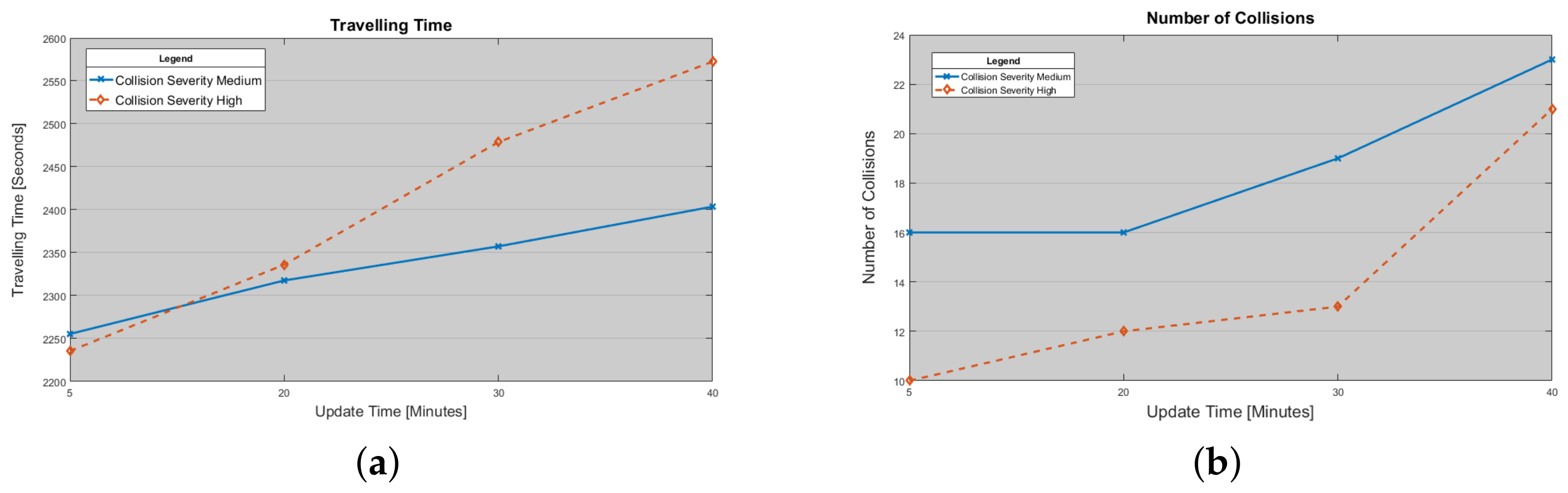
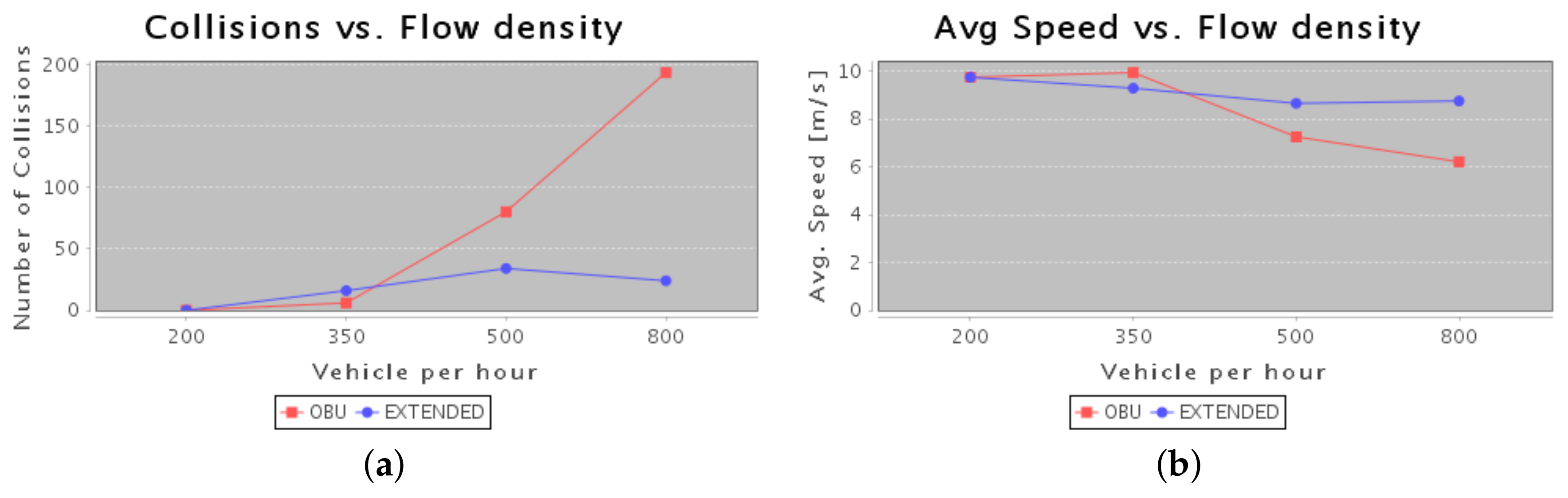
- Number of Collision: it represents the number of collisions due to an accident event in the map;
- Average Speed: it is the average speed of the car during its travelling in the map;
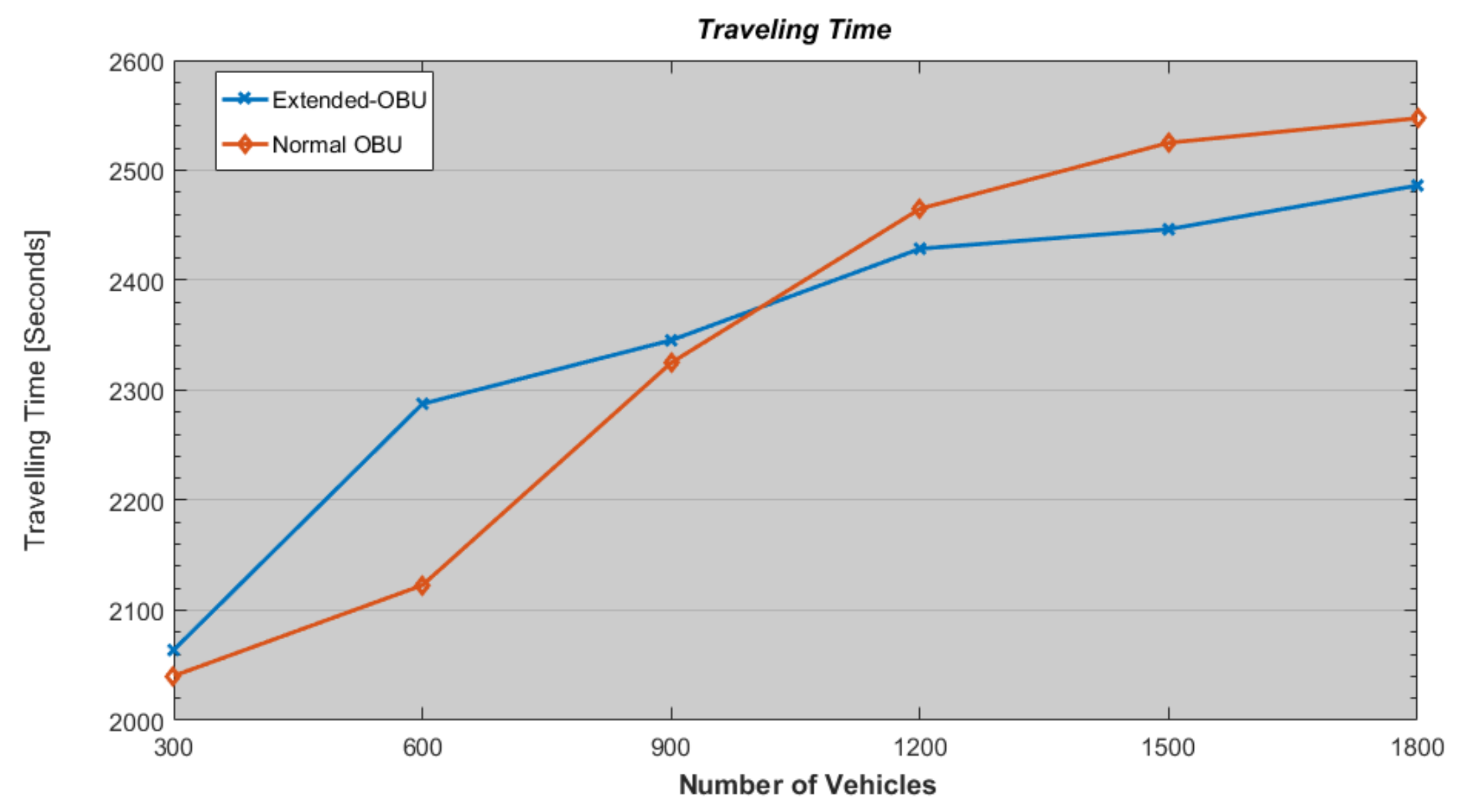
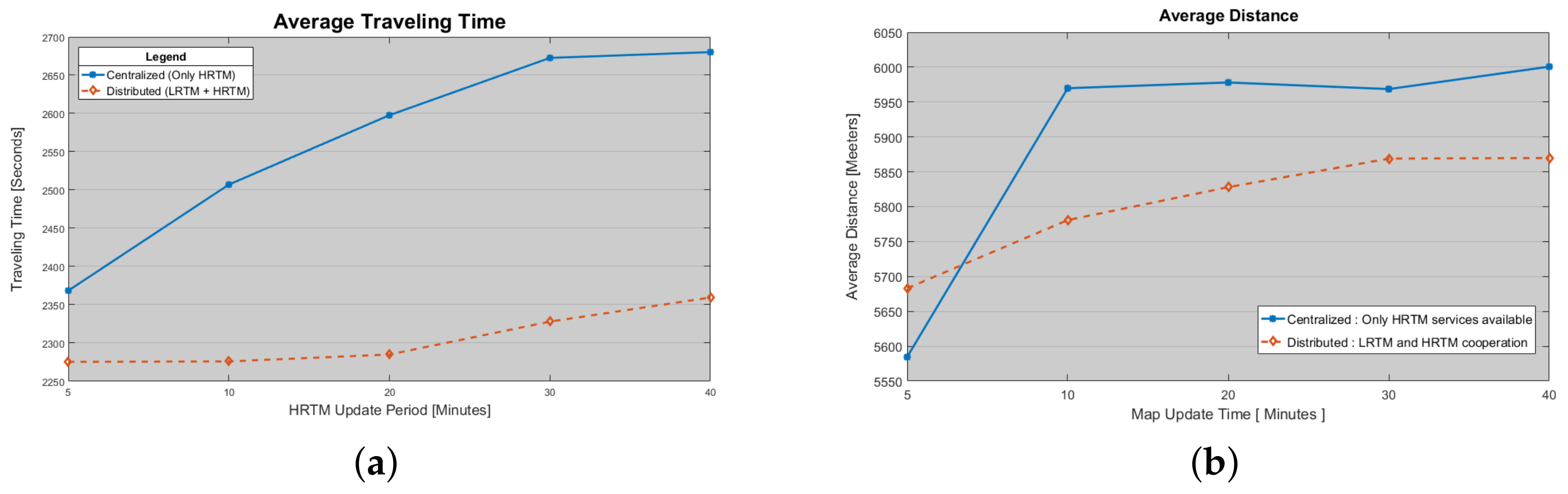
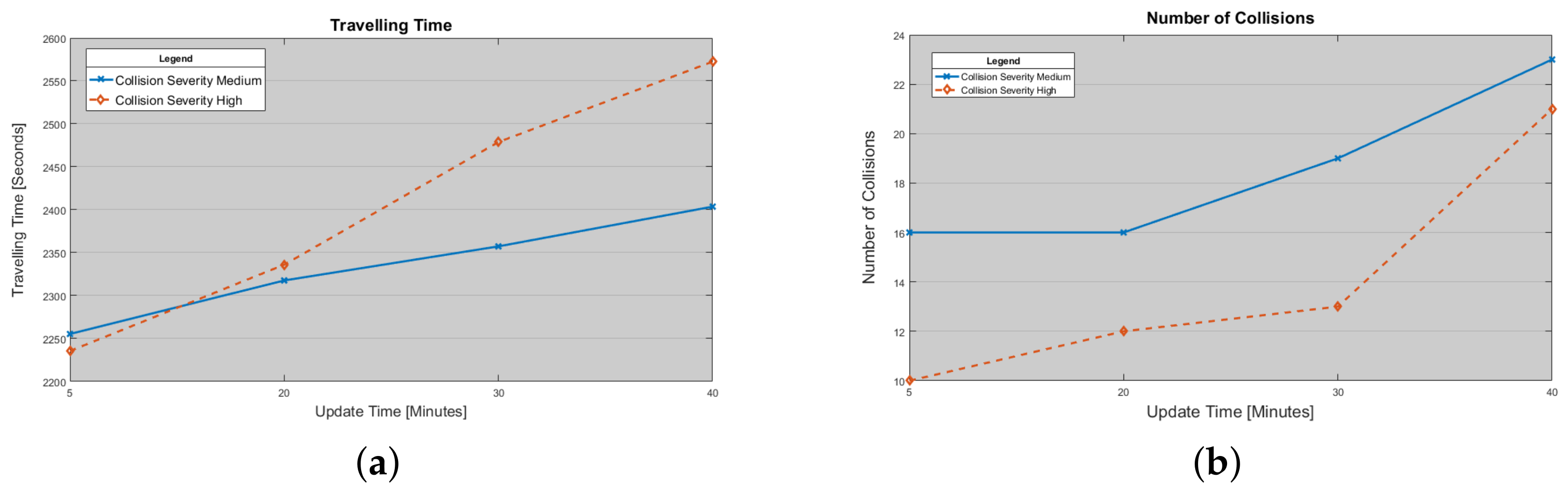
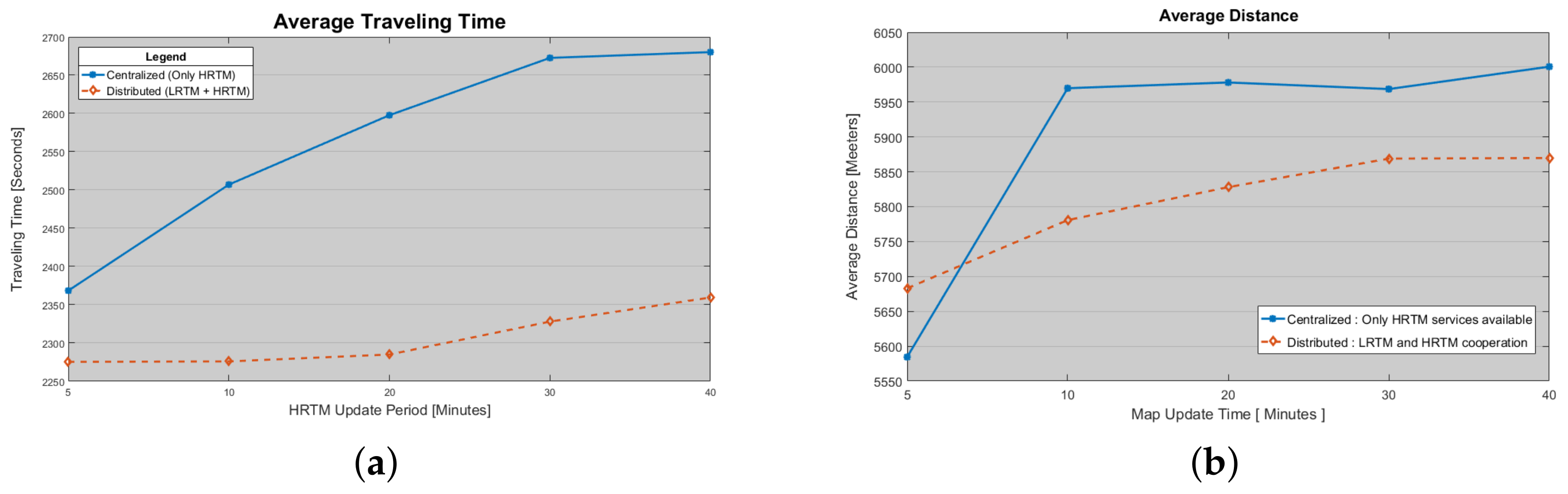
- Travelling Time: it is the time spent by a car during its travelling;
- Average Distance: it is the average distance travelled by car during its path in the map;
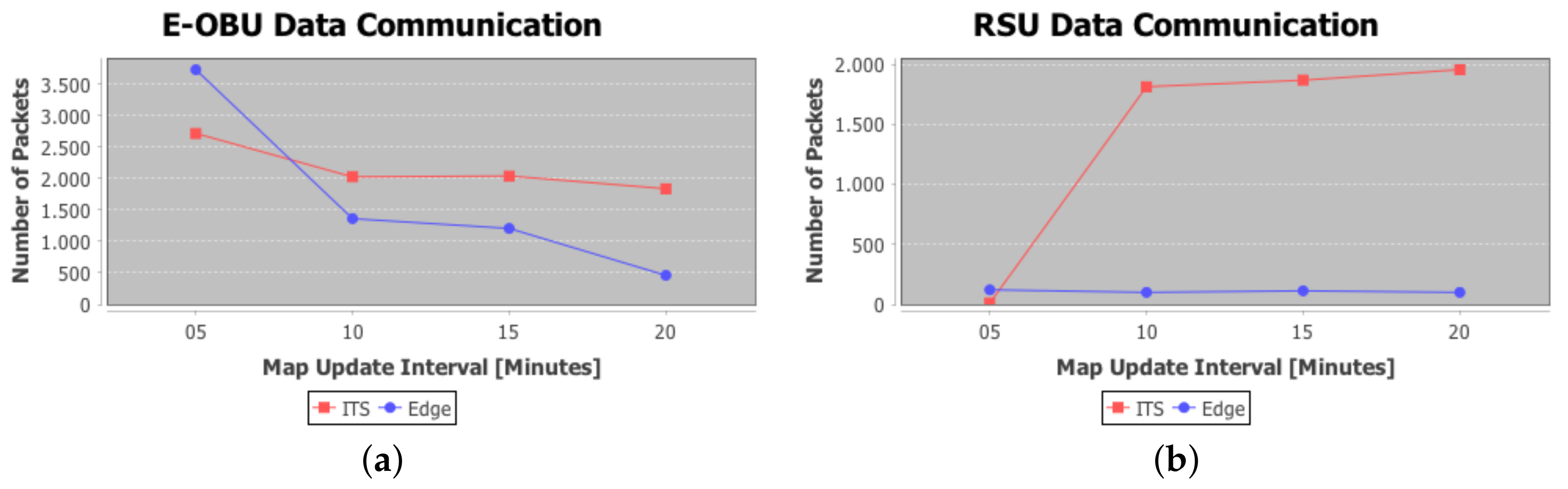
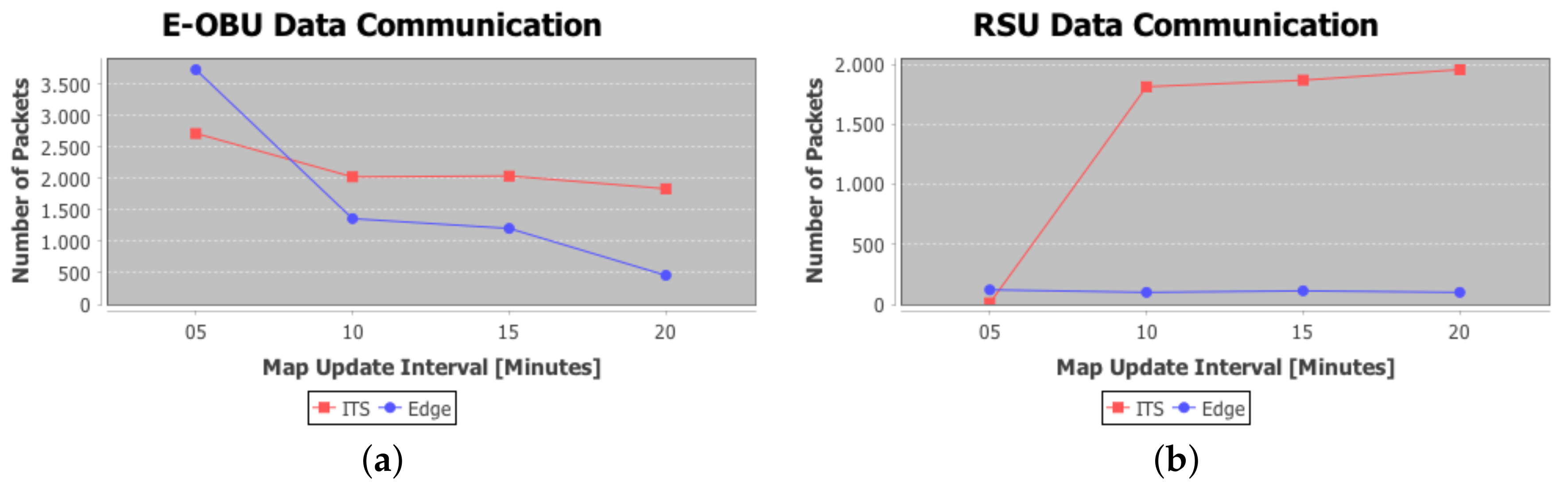
- Number of Packets: it represents the total number of protocol messages sent during the simulation.
6.2. Extended Sensing Evaluation
6.3. Proposed Architecture Evaluation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Istat.it—Incidenti Stradali. Available online: http://www.istat.it/it/archivio/incidenti+stradali (accessed on 27 February 2018).
- OMS. Available online: http://www.ansa.it/canale_saluteebenessere/notizie/sanita/2017/05/05/oms-ogni-anno-125-mln-morti-su-strade-mondo_f288f131-693a-45fe-8998-c102afb6e44a.html (accessed on 27 February 2018).
- Zhang, J.; Wang, F.Y.; Wang, K.; Lin, W.H.; Xu, X.; Chen, C. Data-Driven Intelligent Transportation Systems: A Survey. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Van Rijn, L.J.; Nischler, C.; Michael, R.; Heine, C.; Coeckelbergh, T.; Wilhelm, H.; van den Berg, T.J. Prevalence of impairment of visual function in European drivers. Acta Ophthalmol. 2011, 89, 124–131. [Google Scholar] [CrossRef] [PubMed]
- Kurmis, M.; Voznak, M.; Kucinskas, G.; Drungilas, D.; Lukosius, Z.; Jakovlev, S.; Andziulis, A. Development of method for service support management in vehicular communication networks. Adv. Electr. Electron. Eng. 2017, 15, 598–605. [Google Scholar] [CrossRef]
- Cumbal, R.; Palacios, H.; Hincapie, R. Optimum deployment of RSU for efficient communications multi-hop from vehicle to infrastructure on VANET. In Proceedings of the 2016 IEEE Colombian Conference on Communications and Computing (COLCOM), Cartagena, Colombia, 27–29 April 2016; pp. 1–6. [Google Scholar]
- Wang, Y.; Ho, I.W.H. On-road feature detection and fountain-coded data dissemination in vehicular ad-hoc networks. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Kurmis, M.; Andziulis, A.; Dzemydiene, D.; Jakovlev, S.; Voznak, M.; Gricius, G. Cooperative Context Data Acquisition and Dissemination for Situation Identification in Vehicular Communication Networks. Wirel. Pers. Commun. 2015, 85, 49–62. [Google Scholar] [CrossRef]
- Sun, Z.; Bebis, G.; Miller, R. On-road vehicle detection using optical sensors: A review. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems (IEEE Cat. No.04TH8749), Washington, WA, USA, 3–6 October 2004; pp. 585–590. [Google Scholar]
- Tomar, R.; Prateek, M.; Sastry, H.G. Analysis of beaconing performance in IEEE 802.11p on vehicular ad-hoc environment. In Proceedings of the 2017 4th IEEE Uttar Pradesh Section International Conference on Electrical, Computer and Electronics (UPCON), Mathura, India, 26–28 October 2017; pp. 692–696. [Google Scholar]
- Omar, H.A.; Lu, N.; Zhuang, W. Wireless access technologies for vehicular network safety applications. IEEE Netw. 2016, 30, 22–26. [Google Scholar] [CrossRef]
- Tomtom Real Time Traffic Information. Available online: https://www.tomtom.com/lib/img/REAL_TIME_TRAFFIC_WHITEPAPER.pdf (accessed on 3 March 2018).
- Ferrari, G.; Busanelli, S.; Iotti, N.; Kaplan, Y. Cross-network information dissemination in VANETs. In Proceedings of the 11th International Conference on ITS Telecommunications (ITST), St. Petersburg, Russia, 23–25 August 2011; pp. 351–356. [Google Scholar]
- Leccese, F. Remote-Control System of High Efficiency and Intelligent Street Lighting Using a ZigBee Network of Devices and Sensors. IEEE Trans. Power Delivery 2013, 28, 21–28. [Google Scholar] [CrossRef]
- Leccese, F.; Cagnetti, M.; Trinca, D. A smart city application: A fully controlled street lighting isle based on Raspberry-Pi card, a ZigBee sensor network and WiMAX. Sensors (Switzerland) 2014, 14, 24408–24424. [Google Scholar] [CrossRef] [PubMed]
- Qin, L.; Dong, L.-L.; Xu, W.-H.; Zhang, L.-D.; Leon, A.S. An intelligent luminance control method for tunnel lighting based on traffic volume. Sustainability 2017, 9, 2208. [Google Scholar] [CrossRef]
- Daely, P.T.; Reda, H.T.; Satrya, G.B.; Kim, J.W.; Shin, S.Y. Design of Smart LED Streetlight System for Smart City with Web-Based Management System. IEEE Sens. J. 2017, 17, 6100–6110. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, Q.; Yang, J.; Jiang, T.; Liu, Z.; Li, J. Intelligent luminance control of lighting systems based on imaging sensor feedback. Sensors 2017, 17, 321. [Google Scholar] [CrossRef] [PubMed]
- Masek, P.; Masek, J.; Frantik, P.; Fujdiak, R.; Ometov, A.; Hosek, J.; Andreev, S.; Mlynek, P.; Misurec, J. A harmonized perspective on transportation management in smart cities: The novel IoT-driven environment for road traffic modeling. Sensors 2016, 16, 1872. [Google Scholar] [CrossRef] [PubMed]
- Chang, I.-C.; Tai, H.-T.; Yeh, F.-H.; Hsieh, D.-L.; Chang, S.-H. A VANET-Based Route Planning Algorithm for Travelling Time- and Energy-Efficient GPS Navigation App. Int. J. Distrib. Sens. Netw. 2013, 9, 794521. [Google Scholar] [CrossRef]
- Li, C.; Shimamoto, S. Dynamic traffic light control scheme for reducing CO2 emissions employing ETC technology. Int. J. Manag. Public Sect. Inf. Commun. Technol. 2011, 2, 1–12. [Google Scholar]
- Ramadhani, F.; Bakar, K.A.; Hussain, M.A.; Erixno, O.; Nazir, R. Optimization with traffic-based control for designing standalone streetlight system: A case study. Renew. Energy 2017, 105, 149–159. [Google Scholar] [CrossRef]
- Lau, S.P.; Merrett, G.V.; Weddell, A.S.; White, N.M. A traffic-aware street lighting scheme for Smart Cities using autonomous networked sensors. Comput. Electr. Eng. 2015, 45, 192–207. [Google Scholar] [CrossRef]
- Marino, F.; Leccese, F.; Pizzuti, S. Adaptive Street Lighting Predictive Control. Energy Procedia 2017, 111, 790–799. [Google Scholar] [CrossRef]
- Golestan, K.; Khaleghi, B.; Karray, F.; Kamel, M.S. Attention Assist: A High-Level Information Fusion Framework for Situation and Threat Assessment in Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1271–1285. [Google Scholar] [CrossRef]
- Khekare, G.S.; Sakhare, A.V. Intelligent traffic system for VANET: A survey. Int. J. Adv. Comput. Res. 2012, 2, 99–102. [Google Scholar]
- Al-Dweik, A.J.; Mayhew, M.; Muresan, R.; Ali, S.M.; Shami, A. Using Technology to Make Roads Safer: Adaptive Speed Limits for an Intelligent Transportation System. IEEE Veh. Technol. Mag. 2017, 12, 39–47. [Google Scholar] [CrossRef]
- Knorr, F.; Baselt, D.; Schreckenberg, M.; Mauve, M. Reducing traffic jams via VANETs. IEEE Trans. Veh. Technol. 2012, 61, 3490–3498. [Google Scholar] [CrossRef]
- Wang, M.; Shan, H.; Lu, R.; Zhang, R.; Shen, X.; Bai, F. Real-Time Path Planning Based on Hybrid-VANET-Enhanced Transportation System. IEEE Trans. Veh. Technol. 2015, 64, 1664–1678. [Google Scholar] [CrossRef]
- Nzouonta, J.; Rajgure, N.; Wang, G.; Borcea, C. VANET Routing on City Roads Using Real-Time Vehicular Traffic Information. IEEE Trans. Veh. Technol. 2009, 58, 3609–3626. [Google Scholar] [CrossRef]
- Tomas-Gabarron, J.B.; Egea-Lopez, E.; Garcia-Haro, J. Vehicular Trajectory Optimization for Cooperative Collision Avoidance at High Speeds. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1930–1941. [Google Scholar] [CrossRef]
- Fazio, P.; de Rango, F.; Sottile, C.; Calafate, C. A New Channel Assignment Scheme for Interference-Aware Routing in Vehicular Networks. In Proceedings of the IEEE 73rd Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 15–18 May 2011; pp. 1–5. [Google Scholar]
- Fazio, P.; de Rango, F.; Sottile, C.; Santamaria, A.F. Routing optimization in vehicular networks: A new approach based on multiobjective metrics and minimum spanning tree. Int. J. Distrib. Sens. Netw. 2013, 9, 598675. [Google Scholar] [CrossRef]
- Fazio, P.; de Rango, F.; Sottile, C. An on demand interference aware routing protocol for VANETS. JNW 2012, 7, 1728–1738. [Google Scholar] [CrossRef]
- He, J.; Cai, L.; Cheng, P.; Pan, J. Delay Minimization for Data Dissemination in Large-Scale VANETs with Buses and Taxis. IEEE Trans. Mob. Comput. 2016, 15, 1939–1950. [Google Scholar] [CrossRef]
- Pojani, D.; Stead, D. Sustainable urban transport in the developing world: Beyond megacities. Sustainability 2015, 7, 7784–7805. [Google Scholar] [CrossRef]
- Mouradian, C.; Naboulsi, D.; Yangui, S.; Glitho, R.H.; Morrow, M.J.; Polakos, P.A. A Comprehensive Survey on Fog Computing: State-of-the-Art and Research Challenges. IEEE Commun. Surv. Tutor. 2018, 20, 416–464. [Google Scholar] [CrossRef]
- Kai, K.; Cong, W.; Tao, L. Fog computing for vehicular Ad-hoc networks: Paradigms, scenarios, and issues. J. China Univ. Posts Telecommun. 2016, 23, 56–96. [Google Scholar] [CrossRef]
- Uzcategui, R.A.; de Sucre, A.J.; Acosta-Marum, G. Wave: A tutorial. IEEE Commun. Mag. 2009, 47, 126–133. [Google Scholar] [CrossRef]
- IEEE Standard Committee. IEEE Standard for Wireless Access in Vehicular Environments (WAVE)–Networking Services; IEEE Std 1609; IEEE Standard Committee: Piscataway, NJ, USA, 2010; pp. 3–2010. [Google Scholar]
- Li, Y.J. An overview of the DSRC/WAVE technology. In Proceedings of the Conference on Heterogeneous Networking for Quality, Reliability, Security and Robustness, Houston, TX, USA, 17–19 November 2010; Springer: Berlin, Heidelberg, 2010; pp. 544–558. [Google Scholar]
- Schunemann, B.; Massow, K.; Radusch, I. A Novel Approach for Realistic Emulation of Vehicle-2-X Communication Applications. In Proceedings of the Vehicular Technology Conference (VTC Spring 2008), Singapore, 11–14 May 2008; pp. 2709–2713. [Google Scholar]
- Fazio, P.; Tropea, M.; de Rango, F. A Novel PER Degradation Model for VANETs. IEEE Commun. Lett. 2015, 19, 851–854. [Google Scholar] [CrossRef]
- Paier, A.; Faetani, D.; Mecklenbräuker, C.F. Performance evaluation of IEEE 802.11p physical layer infrastructure-to-vehicle real-world measurements. In Proceedings of the 2010 3rd International Symposium on Applied Sciences in Biomedical and Communication Technologies (ISABEL 2010), Rome, Italy, 7–10 November 2010; pp. 1–5. [Google Scholar]
- Vaculik, M.; Franekova, M.; Vestenicky, P.; Vestenicky, M. On-Board Unit and its Possibilities of Communications on Safety and Security Principles. Adv. Electr. Electron. Eng. 2008, 7, 235–238. [Google Scholar]
- Guo, H.; Wu, Y. An Integrated Embedded Solution for Vehicle Communication & Control. In Proceedings of the International Conference on Robotics, Informatics, Intelligence Control system Technologies, Bangkok, Thailand, 25–26 September 2009. [Google Scholar]
- Mohammad, S.A.; Rasheed, A.; Qayyum, A. VANET architectures and protocol stacks: A survey. In Proceedings of the Workshop on Communication Technologies for Vehicles, Oberpfaffenhofen, Germany, 23–24 March 2011; Springer: Berlin, Heidelberg, 2011; pp. 95–105. [Google Scholar]
- Marshall, S. Line structure representation for road network analysis. J. Transp. Land Use 2016, 9, 29–64. [Google Scholar] [CrossRef]
- Masucci, A.P.; Smith, D.; Crooks, A.; Batty, M. Random planar graphs and the London street network. Eur. Phys. J. B 2009, 71, 259–271. [Google Scholar] [CrossRef]
- Masucci, A.P.; Stanilov, K.; Batty, M. Exploring the Evolution of London’s Street Network in the Information Space: A Dual Approach. Phys. Rev. E 2014, 89, 012805. [Google Scholar] [CrossRef] [PubMed]
- Garavello, M.; Piccoli, B. Traffic Flow on Networks—Conservation Laws Models; American Institute of Mathematical Sciences (AIMS): Springfield, MO, USA, 2006. [Google Scholar]
- Wu, N. Impact of traffic regulation on lane flow-distribution and capacity of motorways. In Proceeding of the Fifth International Conference of Transportation Professionals, Xian, China, 25–26 June 2005; pp. 24–26. [Google Scholar]
- Tian, Z.; Wu, N. Probability of capacity enhancement and disruption for freeway ramp controls: Analysis by gap-acceptance and queuing models. Transp. Res. Rec. J. Transp. Res. Board 2012, 2278, 1–12. [Google Scholar] [CrossRef]
- Omnetpp. Available online: https://www.omnetpp.org/ (accessed on 10 March 2018).
- Veins. Available online: http://veins.car2x.org/ (accessed on 10 March 2018).
- Sumo. Available online: http://sumo.dlr.de/index.html (accessed on 10 March 2018).
- Arulkumar, N.; Raj, E.G.D.P. A simulation based study to implement Intelligent Transport Systems concepts in VANETs using AODV routing protocol in NS2. In Proceedings of the 2012 Fourth International Conference on Advanced Computing (ICoAC), Chennai, India, 13–15 December 2012; pp. 1–4. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Name | Type of Data | Length in Byte | Description |
|---|---|---|---|
| Source_ID | Unsigned int | 2 | ID of E-OBU that generates the message |
| Latitude | Float | 2 | Latitude of Vehicle |
| Longitude | Float | 2 | Longitude of Vehicle |
| Road ID | Unsigned Int | 2 | Road ID |
| Lane ID | Unsigned Short | 1 | Lane ID |
| Speed | Unsigned Short | 1 | Speed in Kmph |
| Sequence Number | Unsigned Short | 1 | Sequence Number |
| Padding | Unsigned Short | 1 | N.A. |
| Field Name | Type of Data | Length in Byte | Description |
|---|---|---|---|
| Source_ID | Unsigned int | 2 | ID of E-OBU or RSU that generates the message |
| Road_ID | Unsigned int | 2 | unique ID that represents the road globally in the ITS |
| Lane_ID | Unsigned short | 1 | ID of road lane involved in warning |
| TOW | Enumerate | 1 | Warning or Collision Beacon |
| Interface origin | Enumerate | 1 | [ILLI, HLI, ...] |
| Optional Data Length | Unsigned Short | 1 | Optional Data length in Byte |
| Field Name | Type of Data | Length in Byte | Description | |
|---|---|---|---|---|
| LRTM_ID | Unsigned int | 2 | ID of LRTM device | |
| Road_ID | Unsigned int | 2 | ID that represents the road globally in the ITS | |
| Lane_ID | Unsigned short | 1 | ID of road lane involved in update status | |
| Type of Data | Enumerate | 1 | 0-Inhibit | 1-Update |
| Weight data field | Float | 2 | new lane metric value: | |
| Density Factory | Float | 2 | Density factory: | |
| Traveling Delay | Float | 2 | Delay value: | |
| Param. Name | Param. Value | Description |
|---|---|---|
| City Area size | 11 Km × 12 Km | City map area size managed by ITS |
| Number of FLows | 4–6 | Regulate vehicle density in the monitored area |
| Flow 1 | 50–300 | From 8 a.m. to 12 p.m.: Vehicle per Hour (Vph) |
| Flow 2 | 50–300 | From 8 a.m. to 2 p.m.: Vehicle per Hour (Vph) |
| Flow 3 | 50–300 | From 8 p.m. to 3 p.m.: Vehicle per Hour (Vph) |
| Flow 4 | 50–300 | From 8 p.m. to 6 p.m.: Vehicle per Hour (Vph) |
| Flow 5 | 50–300 | From 14 p.m. to 7 p.m.: Vehicle per Hour (Vph) |
| Flow 6 | 50–300 | From 14 p.m. to 7 p.m.: Vehicle per Hour (Vph) |
| Simulation time | From 0 a.m. to 8 p.m. | Time of the day take into consideration for sims |
| RSUs coverage | 100–300 m | Coverage radius area for RSU devices |
| Vehicle warning propagation | 80–300 m | coverage distance for flooding warning |
| RSU dissemination | 1–16 Hops | RSU multi-hop warning dissemination |
| E-OBU Sensing Distance | 3–15 m | Sensors coverage distance |
| Tx Power for Vanet Device | 20 dBm | |
| Wave lenght | 0.051 | 5.0 GHz of frequency (IEEE802.11p) |
| Fading Factor | 2 | fading factor in the vehicular environment |
| Rx Antenna Gain | 2 | Rx antenna gain |
| Tx Antenna Gain | 2 | Tx antenna gain |
| Antenna Height of vehicle | 1.50 m | Vehicular antenna height from the ground |
| Antenna Height of RSU | 3.0 m | Rsu antenna height from the ground |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santamaria, A.F.; Tropea, M.; Fazio, P.; De Rango, F. Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation. Sensors 2018, 18, 1461. https://doi.org/10.3390/s18051461
Santamaria AF, Tropea M, Fazio P, De Rango F. Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation. Sensors. 2018; 18(5):1461. https://doi.org/10.3390/s18051461
Chicago/Turabian StyleSantamaria, Amilcare Francesco, Mauro Tropea, Peppino Fazio, and Floriano De Rango. 2018. "Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation" Sensors 18, no. 5: 1461. https://doi.org/10.3390/s18051461
APA StyleSantamaria, A. F., Tropea, M., Fazio, P., & De Rango, F. (2018). Managing Emergency Situations in VANET Through Heterogeneous Technologies Cooperation. Sensors, 18(5), 1461. https://doi.org/10.3390/s18051461