1. Introduction
Source localization is one of the key tasks for acoustic sensor networks (ASNs) [
1,
2,
3]. It is typically required for surveillance or monitoring the environment, e.g., vehicle localization [
1,
2], helicopter localization [
4] and animal localization [
5,
6]. In particular, when the spatially distributed nodes are equipped with acoustic arrays, two types of measurements, such as angle of arrival (AOA) [
7] and gain ratio of arrival (GROA) [
8], can be obtained locally using array signal processing techniques. Moreover, time difference of arrival (TDOA) [
9,
10] can also be obtained either in the centralized or distributed way after precise synchronization among the arrays. In fact, the above-mentioned metrics are complementary in terms of their geometry properties [
11]. The usage of their combinations can improve the positioning accuracy [
11,
12,
13,
14,
15].
In the ASN setting, acoustic arrays are randomly deployed in an area. Each array or node consists of several microphones for signal collection, a battery for energy supplies, a microprocessor for local computation and a radio for data communication. Due to the resource limitation, e.g., power supplement, wireless bandwidth, local computational capacity, etc., the localization task is generally divided into two steps [
1]: (1) the AOA of the source signal is estimated in each local array; (2) those bearings are intersected to localize the target. In fact, the gain measurements can be acquired during the process of bearing estimation [
16,
17]. The additional gain ratio information can be utilized in conjunction with AOA measurements to improve source localization accuracy. In this paper, we solve the source localization problem using the AOA and GROA measurements jointly.
For AOA-only localization in ASNs, the target position can be estimated by intersecting bearing lines obtained from direction finding sensors at distinct locations. The highly nonlinear relationship between the source position and AOA measurements makes the localization problem nontrivial. For instance, the maximum likelihood (ML) cost functions using AOAs [
18] are nonlinear and nonconvex under the Gaussian noise assumption. The iterative algorithms similar to Gauss–Newton [
19] are commonly used to handle the nonlinearity with an initial guess. However, the global convergence of those iterative algorithms can not be guaranteed. To overcome the shortcomings of the ML method, a semi-definite relaxation [
20] and a geometrical constrained optimization [
21] are proposed to avoid the divergence problem of the ML approach for poor sensor-target geometry cases. However, those optimization algorithms are generally computing expensive, which obstructs their applications in sensor networks whose sensor nodes have limited computational capability. For this reason, algebraic solutions are also received much attention, including weighted least-squares (WLS) [
14], constrained least-squares (CLS) [
22] and weighted instrumental variable (WIV) [
23,
24] methods, etc. Basically, the AOA algebraic localization algorithms are mainly developed in two-dimensional (2D) space. Only a few papers have focused on the 3D scenario in formal literature. The authors in [
23] firstly derived the closed-form bearing-only pseudolinear estimator (BOPLE) using the azimuth and elevation angles jointly. Although the BOPLE estimator is simple to implement, it has bias that does not vanish as the number of measurements increases. In [
25], the authors pointed out that coordinate system rotation can be used to reduce the estimation bias. In [
24], a two-stage weighted instrumental variable estimator has been developed and the estimation bias is compensated. In [
26], the authors developed a bias reduced method for 3D AOA localization in wireless sensor networks with sensor position uncertainty. The bias is mainly formed by the correlation between the measurement matrix and the measurement vector. Compared to the WLS method, the bias can be reduced by the CLS algorithm.
When the signals are captured at the nodes, both bearing and signal amplitude information can be gathered. The signal strength can also be utilized to improve the localization accuracy. The motivation comes from the fact that the received acoustic signal intensity is inversely proportional to the distance between the source and the working node. As referred to in [
27], one of the challenges for energy-based source localization is the nonconvex property of the cost function formulated from the maximum likelihood method [
2]. The approach proposed in [
27] applies a projection-onto-convex-sets method to form a convex feasibility problem, while Ref. [
28] presented a semidefinite relaxation method to avoid plunging into local minima. The above methods focus on the nonlinear least-squares problem. Alternatively, Ref. [
8] developed a closed-form solution using energy ratio measurements.
In this paper, we present a novel closed-form estimator for 3D source localization in ASNs based on hybrid AOA and GROA measurements when the node positions have errors. The proposed method assumes homogeneous atmospheric propagations, which have been commonly used in the related literature mentioned above. First, we linearize the nonlinear equations under the small Gaussian noise condition. We then derive an accurate closed-form estimator by utilizing new geometrical relationships between the hybrid measurements and the unknown source position. The proposed estimator can be implemented with a WLS method for simplicity if the number of sensors is small. For a large number of sensors, the estimator is realized by using a CLS algorithm to reduce the bias. Performance analysis shows that the theoretical mean-square error (MSE) of the proposed estimator can achieve the Cramér–Rao lower bound (CRLB) accuracy when the measurement errors are small. In summary, the main contributions can be listed as follows: (i) by utilizing the AOAs in conjunction with GROAs, we develop a new WLS estimator for 3D source localization; (ii) analogous to the bias reduction technique in [
26], we present a CLS method to reduce the estimation bias with sensor position uncertainty; and (iii) we have proved that the theoretical MSE is equivalent to CRLB under a sufficiently small noise region.
The remainder of this paper is organized as follows.
Section 2 provides the 3D hybrid measurement model. A Hybrid WLS algorithm is presented in
Section 3.
Section 4 derives the hybrid bias reduced estimator using a CLS approach. Simulation results are included in
Section 5, and
Section 6 contains conclusions.
2. Problem Formulation
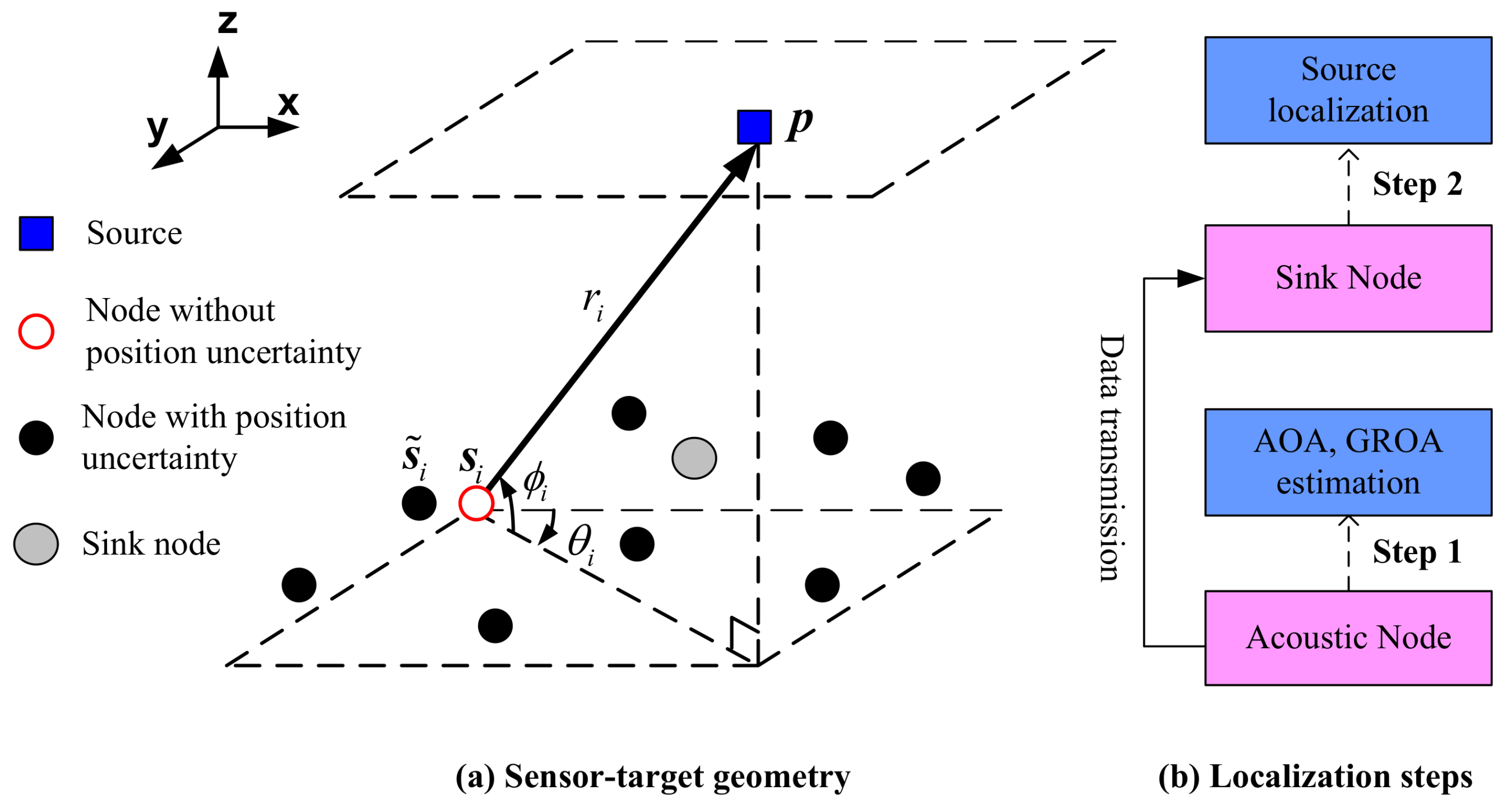
We consider a 3D source localization problem in an ASN.
Figure 1 shows a typical configuration of the ASN.
M nodes are randomly dispersed at positions
and
is the transpose operation,
. The source locates at
. In general, the localization task includes two steps: the first step is to measure AOAs and GROAs in acoustic nodes by exploiting the signals emitting from the target. As for step two, those measurements are communicated to the sink node where the source localization task is accomplished (see
Figure 1b). Data transmission utilizes cluster tree topology, which contains sink node, cluster heads and local nodes. The sink node broadcasts network forming messages to nearby cluster heads, and these control messages are further transmitted to local nodes. As depicted in
Figure 1a, an AOA measurement consists of the azimuth and elevation angles. The true azimuth angle
and elevation angle
are related to the source position and node
i by
where
,
,
,
and
. Let
denote the range vector connecting sensor
to the target
, and
can be expressed as
where
is the distance between the source and sensor
i,
is the Euclidean norm, and
is the normalized range vector. Similar to [
12], we assume that the attenuation of signal gain is proportional to
and the propagation medium is homogeneous. The true GROA received at sensor
j with respect to the reference sensor 1 is
where
,
and
represent the norm of
and
, respectively.
In practice, the sensor measurements are affected by the additive noise and models (
1), (
2) and (
4) become
respectively, where
,
and
are zero mean Gaussian noise terms. It should be noted that the Gaussian-noise assumption presented in Equation (
5) is only applicable to specific scenarios when acoustic signals propagate through homogeneous atmosphere. In practice, this assumption might be invalid. For example, the performance of acoustic localization systems deployed in the atmosphere depends on atmospheric conditions. In most cases, atmospheric turbulence can not be neglected [
29]. In addition, multi-path effects should also be considered [
30], especially for urban or indoor scenarios. Due to these reasons, the additive noise is non-Gaussian and/or impulsive [
31]. Nevertheless, Equation (
5) provides a reasonable model that has been used by other researchers. The AOA model can be found in [
24,
26], and the GROA model can be found in [
8,
12]. The Gaussian noise assumption is a good starting point for us to study the localization performance by jointly utilizing the AOA and GROA measurements.
Moreover, we assume that the sensor positions also have errors. Let
be the noisy sensor position vector.
can be written as
where
is the corresponding sensor position error. For practical applications, the node positions are often determined by self-localization [
32] or GPS and the accuracy can not be perfect. Although the system error or bias may exist during self-positioning, it can be removed by sensor registration [
33]. Similar to the assumption used in [
26], we assume that
follows zero mean Gaussian distribution. Being corrupted by noise, the measurement model can be written in vector form
where
is the measurement vector,
,
and
are the collections of the AOA and GROA measurements, and
is the sensor position vector.
,
,
and
are the vectors where the elements are the true values of AOA and GROA. and
is the true sensor position vector.
is the independent and identically distributed zero mean Gaussian noise with covariance matrix
, where
is the azimuth angle measurement noise vector with covariance matrix
,
is the elevation angle measurement noise vector with covariance matrix
,
is the GROA measurement noise vector with covariance matrix
, and
is the sensor position error vector with covariance matrix
.
The objective of source localization problem is to estimate the location as accurate as possible with all the available measurements, including azimuth angles , elevation angles and GROA .
3. WLS Estimator Using Joint AOA-GROA Measurements
Given measurement model (
4), our task is to find the estimate of
that can attain the CRLB accuracy. Under the Gaussian noise assumption, it is certain that the ML estimation is optimal by minimizing the weighted MSE of
. However, the ML cost function is nonlinear and nonconvex with respect to
. Numerical search is required to solve the ML nonlinear optimization problem, which is costly, and, therefore, we seek to establish a simple closed-form solution for estimating
using AOAs and GROAs jointly.
Both
and
are orthogonal to
. Premultiplying Equation (
3) with
and
, Equation (
3) can be rewritten as
where
. The relationships in Formula (
9) is firstly derived in [
23] using orthogonal vectors. The subspace method can facilitate the analysis for the source localization problem.
For GROAs, we first obtain the following equation from Equation (
3)
Premultiplying Formula (
10) with
yields
To derive Equation (
11), the relationship
is used, which was mentioned previously in [
14]. Substituting the relations
and
into (8), we have
Putting the
equations for
from Equation (
9) and the other
equations for
from Formula (
12) together yields the matrix form
where
is the measurement matrix and
is the measurement vector,
,
,
,
,
,
,
,
,
, and
.
In practice, only noisy vector
is available. By employing these noisy measurements, Equation (
13) becomes
where
denotes the pseudo-linear residual,
and
on the right side of Equation (
14) are
and
with their actual values replaced by the measurements. When the measurement noise is small,
,
,
and
, then we have the following approximations [
26]
According to Equations (
9) and (
15) and
, we obtain the noisy pseudo-linear equations of AOA measurements by neglecting second-order error terms
We then derive the noisy pseudo-linear equations for GROA measurements. The ranges from the target to sensors varies due to the sensor position uncertainty, and it leads to the change of the corresponding GROAs. With regard to noisy ranges, we have the following approximation when the sensor position error is small
Accordingly, the noisy GROAs can be approximated by
Using Equations (
12), (
15) and (
19) and
, the noisy GROA pseudo-linear equation is given by
where
,
and
. Substituting Formulas (
16), (
17) and (
20) into Equation (
14), we obtain
where
on the right side of Equation (
21) is
,
,
,
,
,
,
,
,
,
,
,
,
and
. The abbreviations
and
denote diagonal and block diagonal operations respectively.
Note from model (
7) that
is zero mean Gaussian noise and the covariance matrix of
is
. Then, a weighted least-squares (WLS) (The WLS algorithm was presented at the 36th Chinese Control Conference, Dalian, China, July 2017.) estimate of
can be obtained from Equation (
21)
where
is the weighting matrix. To implement the WLS estimator, we need to calculate the weighting matrix
. However, the matrix
is unknown since it depends on the true source position. We can first replace
by an identity matrix to get the least-squares (LS) initial location estimate, and then compute
using the initial position guess and the noisy measurements. Since the performance of WLS estimator is no sensitive to the errors in the weighting matrix
, it does not require an accurate value. Therefore,
is updated after new measurements arrived and only one or two repetitions are enough.
5. Simulation Results
In this section, we illustrate the performance of the proposed CLS method using AOA and GROA measurements jointly and compare it with the bearing-only WLS and CLS algorithms. We also include the WLS estimator from (
23). The weighted matrix utilized in the WLS algorithm is calculated according to the result of the LS method.
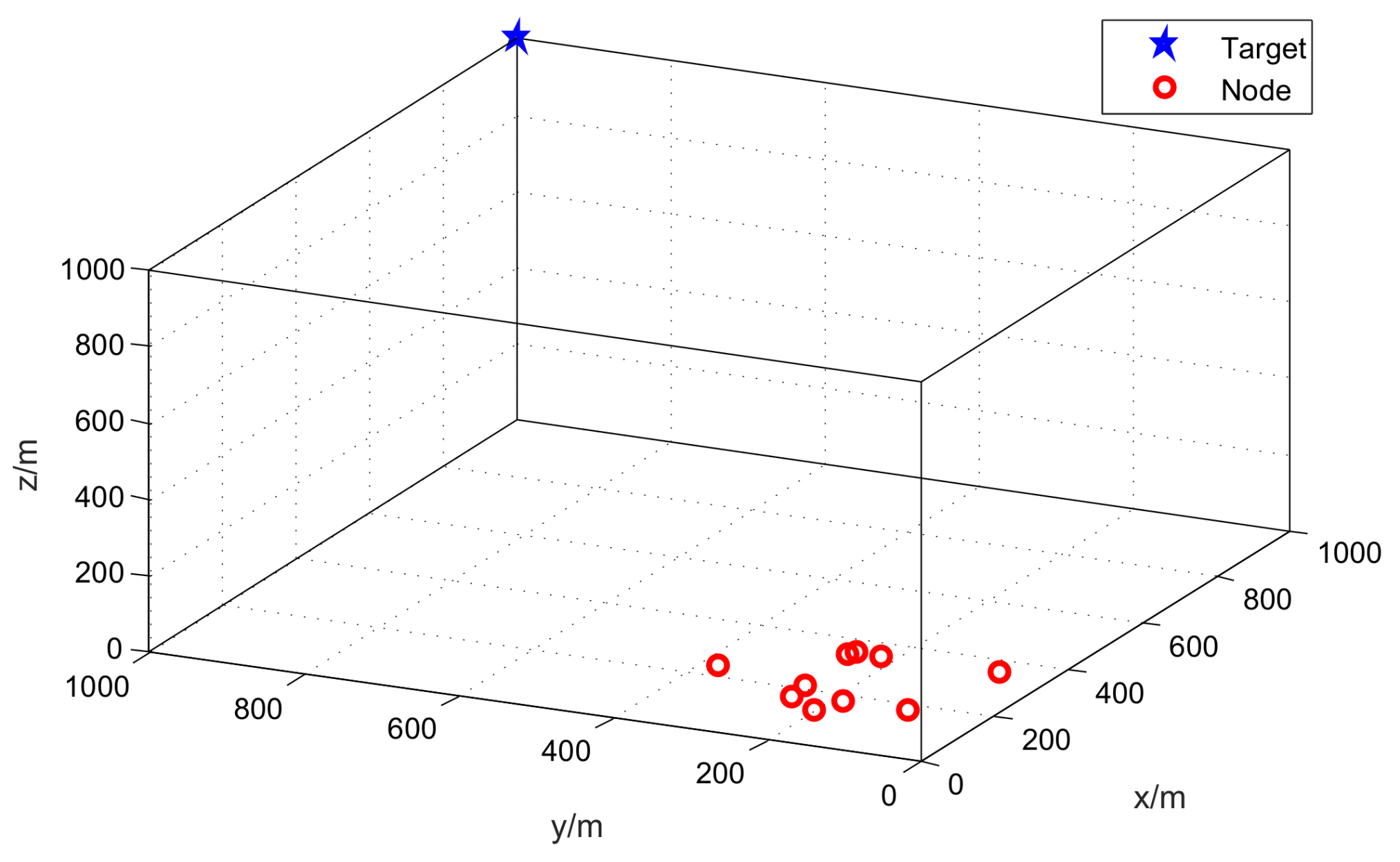
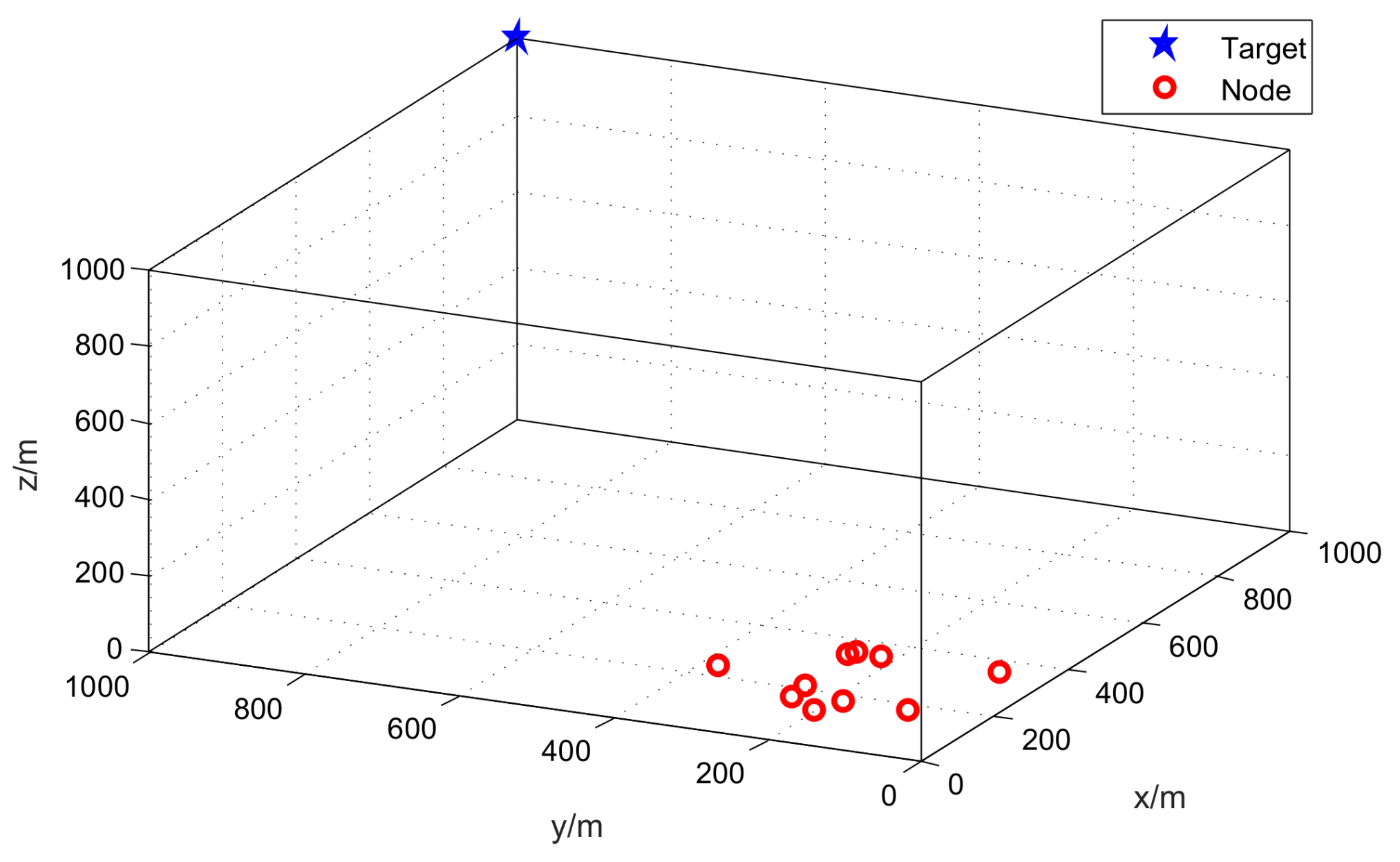
In the simulations, we assume that
M acoustic nodes are placed on the unmanned aerial vehicles (UAVs). The UAVs are networked together to localize an aeroplane or a helicopter. The UAVs are flying at the same speed and in the same direction. The positions of UAVs are generated randomly within a 500 m × 500 m × 50 m cube. The target location is set at (1000 m, 1000 m, 1000 m).
Figure 2 plots the sensor-target geometry, where the red circle denotes the position of the node and the blue star represents the location of the target.
The acoustic nodes on each UAV platform can take azimuth, elevation and GROA measurements simultaneously. The azimuth error, elevation error, GROA error and the sensor position error are independent and they follow zero mean Gaussian distribution with diagonal covariance matrices , , and . For simplicity, the covariance matrices of azimuth noise and elevation noise are set equal and . We make comparisons over various AOA, GROA and sensor position errors, whose noise powers are denoted by , and respectively. We will examine the localization accuracy where one noise variance varies while the other noise powers are fixed. To alleviate the dependency of a particular geometry, we first do experiments over 100 random geometries. For each geometry, the number of Monte Carlo runs is 50.
5.1. Fixed Number of Nodes
We first consider the source localization scenario when the number of nodes is fixed at 10. To compare the performance of the algorithms, we compute the average mean square error (
MSE),
where
is the estimated target position at the
k-th simulation run, and
K is the total number of runs. In the figures drawn as follows, we will use log-scale for MSE to show the wide range of the levels examined in this example, which is given by
.
We set the standard deviation of the AOA measurement noise from 0.5° (0.0087 radian) to 5° (0.087 radian), that of the GROA noise from 10−4 to 10−2 and that of the sensor position error from 10−2 m to 10 m.
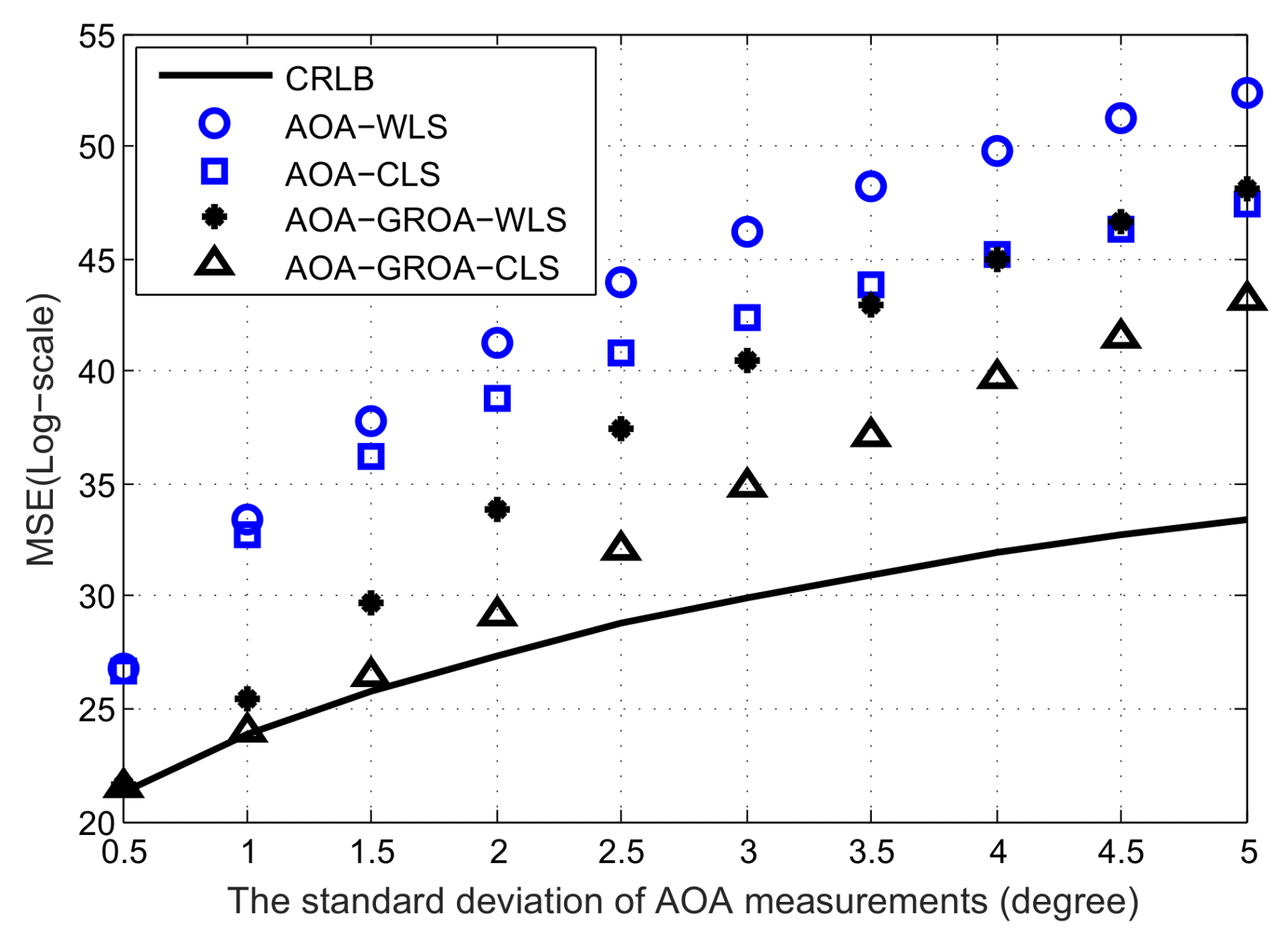
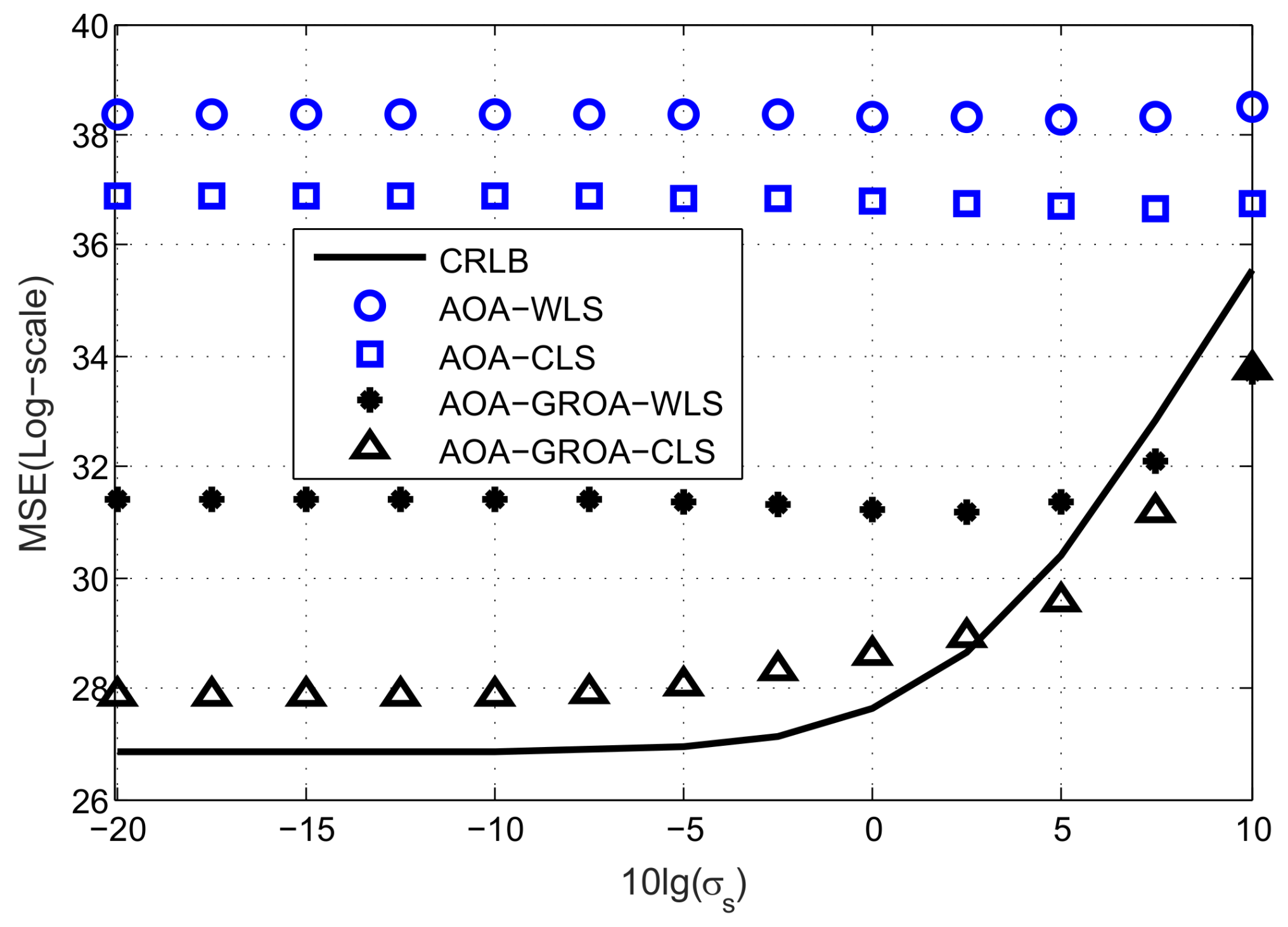
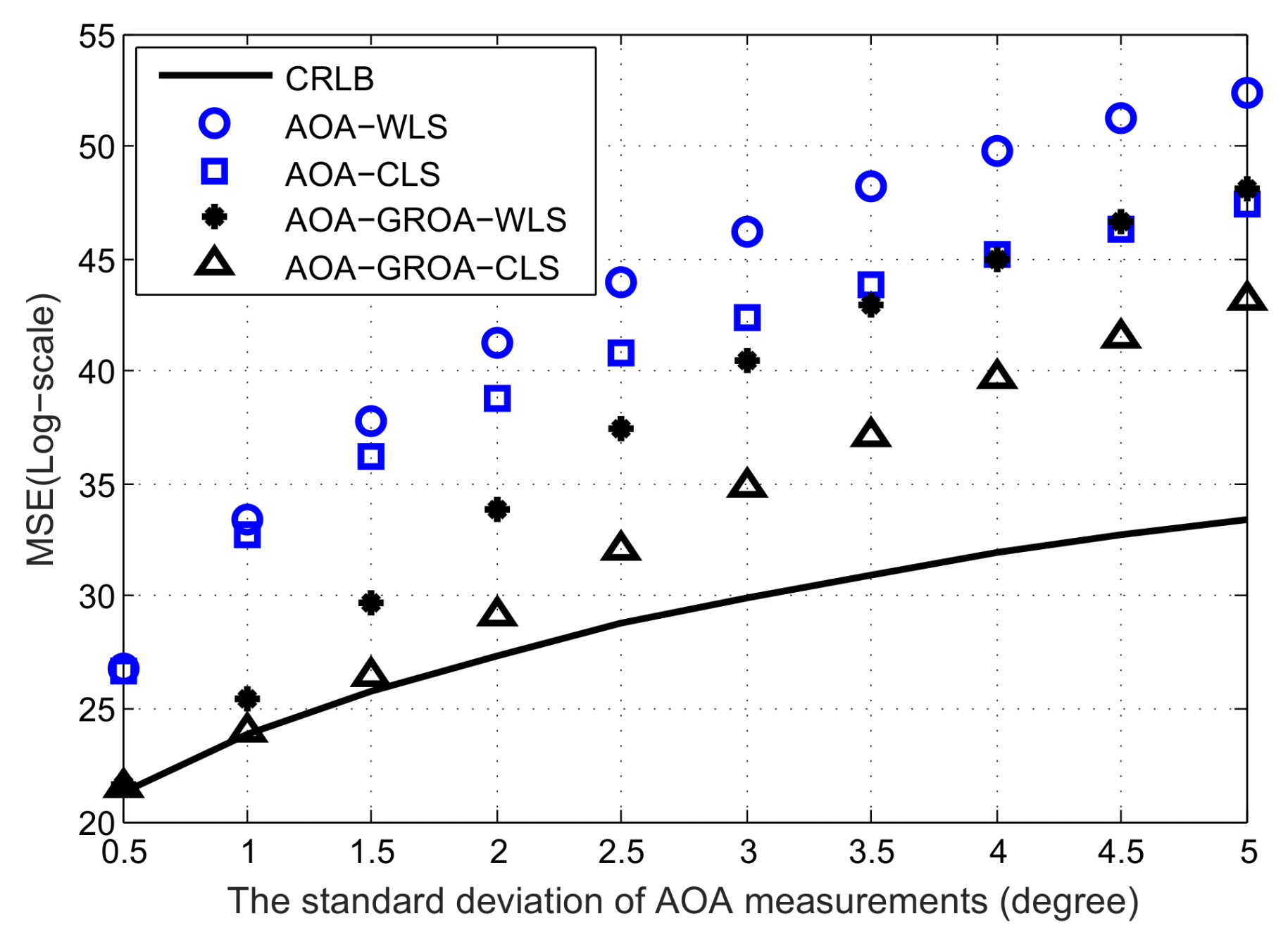
In
Figure 3, we plot the average MSE results as
varies, where
and
are fixed at 3 × 10
−3 and 10
−2 m, respectively. The MSEs of the AOA-only WLS, AOA-only WLS, AOA-GROA WLS and AOA-GROA CLS methods are drawn by the blue circle, blue square, black star and black upper triangle, respectively. The black solid line is the CRLB of the proposed method. As can be seen, the proposed CLS estimator using AOA-GROA outperforms the other methods, and it can achieve CRLB when
is below 1.5°. From
Figure 3, we observe that the GROA information can be used to improve location accuracy. The AOA-GROA WLS algorithm outperforms the AOA-WLS method to 8 dB. Note that a difference of 3 dB is equivalent to multiplying 2 in the MSE calculation. Compared to the AOA-CLS method, the AOA-GROA CLS algorithm has better performance and the improvement is about 9 dB. The performance of the AOA-GROA WLS and the AOA-GROA CLS are quite close when
is below 0.5°. This is because the biases of both methods are small at a low noise level. However, the AOA-GROA CLS is more beneficial to reducing the bias when
is above 1°.
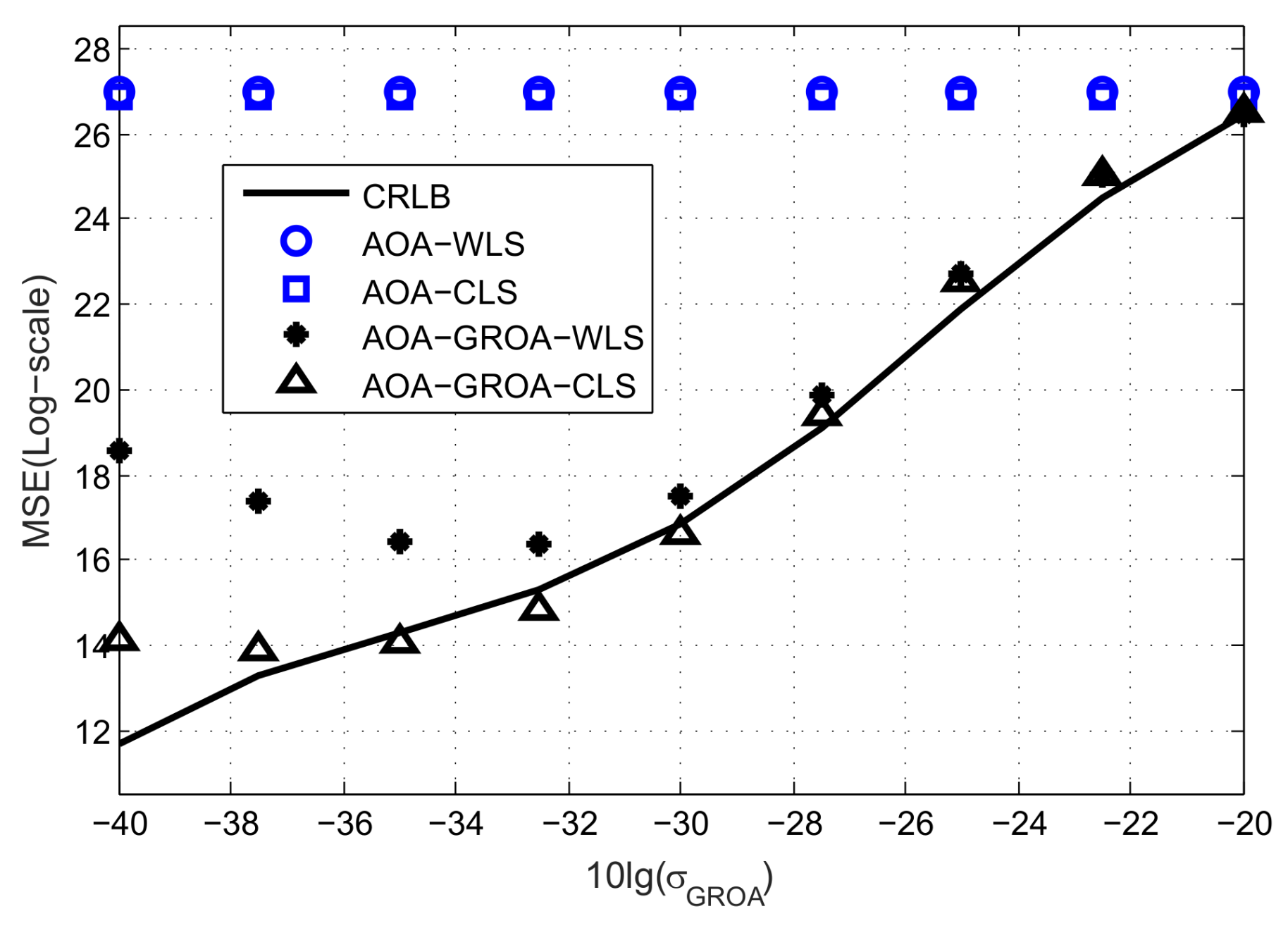
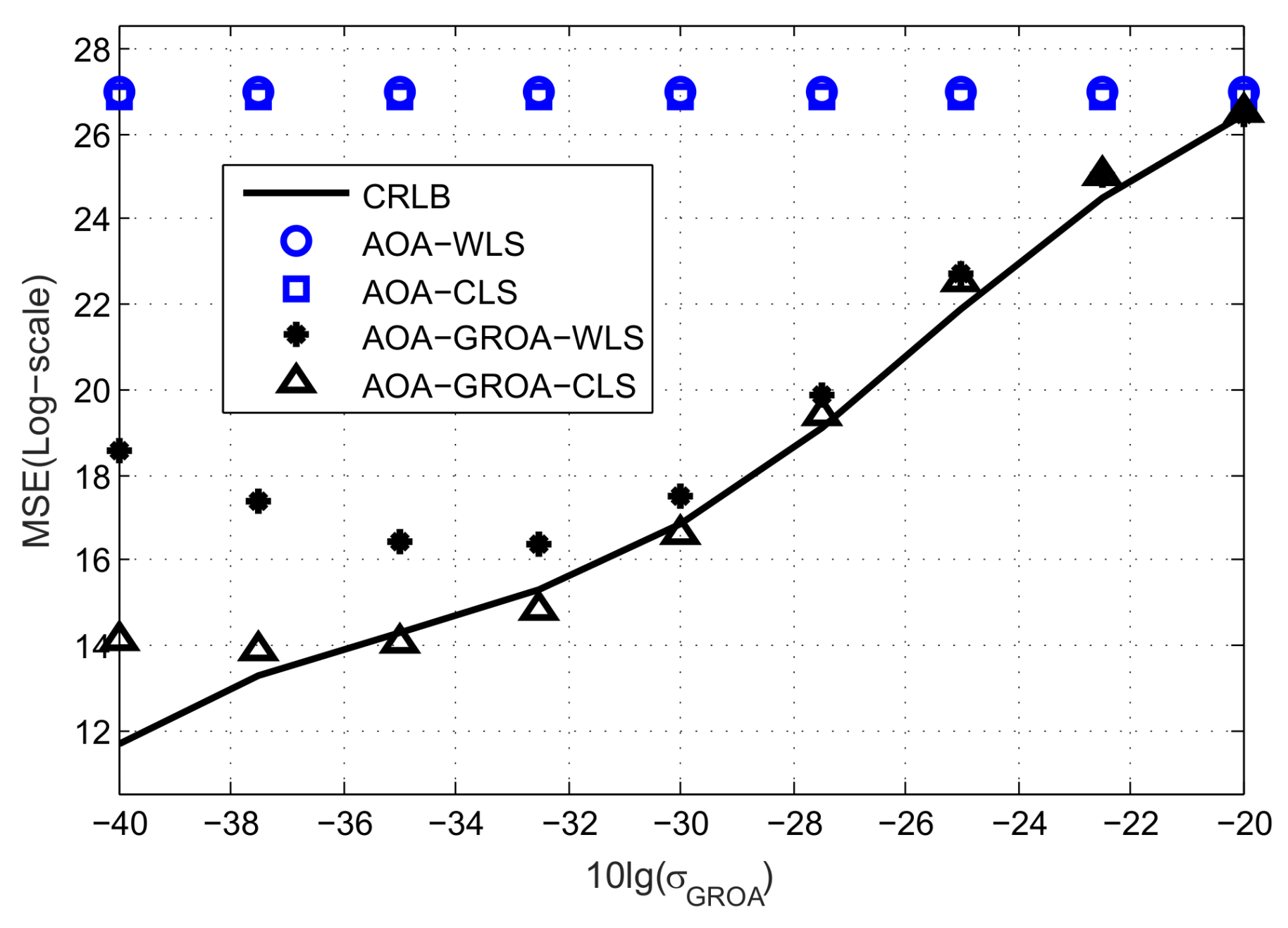
Figure 4 shows the average MSEs of the methods as
varies, where
and
are fixed at 10
−2 radian and 10
−2 m. When
is above 10
−2, using both AOAs and GROAs gives about the same accuracy as using AOAs only. This is because the proposed algorithm puts much more weight on AOAs rather than GROAs at a high level of
. When
is below 5 × 10
−4, the average MSE of the proposed method does not reduce as the value of
gets small. This is because the performance is dominated by the GROAs and the bias introduced by the GROAs can not be neglected. The estimation results of the AOA-only WLS and the AOA-only CLS in
Figure 4 are the same because these two methods are not related to
.
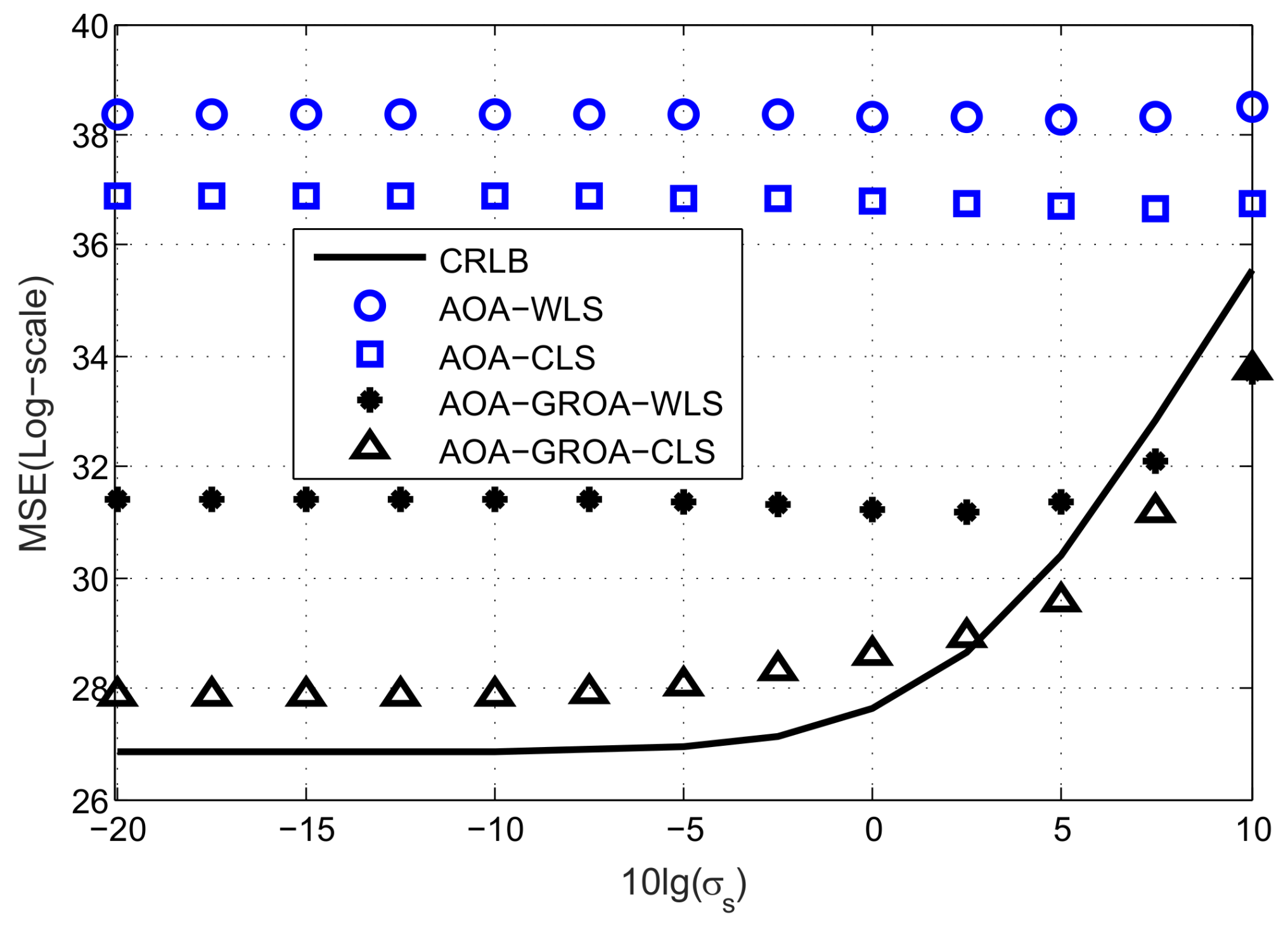
Figure 5 depicts the average MSE performance of the methods as
varies, where
and
are fixed at 10
−2 radian and 3 × 10
−3, respectively.
Figure 5 validates the proposed AOA-GROA CLS method, which provides superior performance on the sensor position uncertainty. The AOA-GROA CLS method is very useful for a small value of
. When
reaches 10 m, the results of using the AOA-GROA WLS and AOA-GROA CLS methods are almost the same.
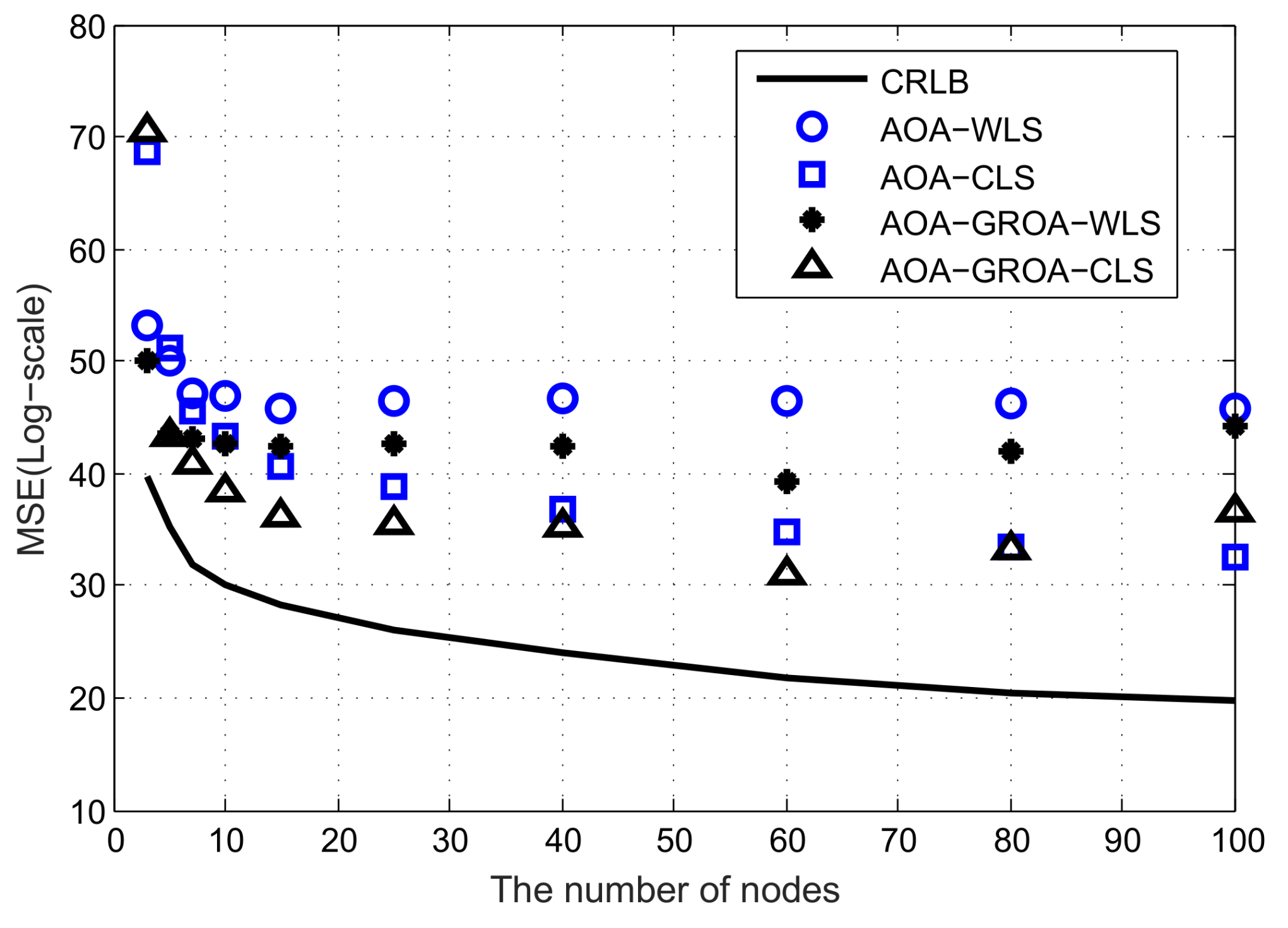
5.2. Changed Number of Nodes
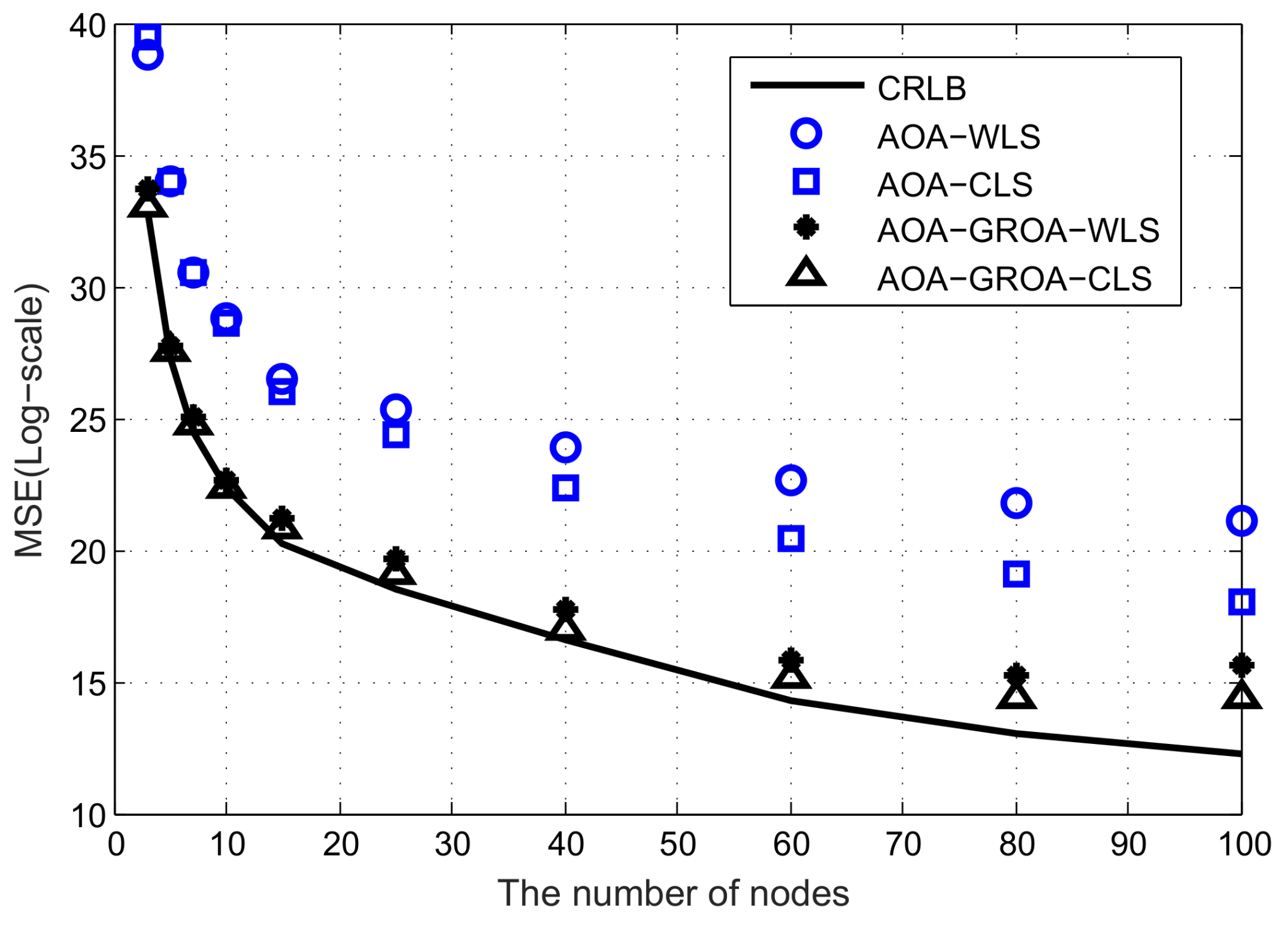
In this subsection, we consider the location accuracy of various methods when the number of nodes varies. The number of nodes changes from 3 to 100. All nodes are randomly placed within a 500 m × 500 m × 50 m cube. The position of the target is fixed at (1000, 1000, 1000) m. As such, we can illustrate that the number of nodes can affect the location accuracy.
Similar to the experiments done in the case of fixed number of nodes, we do comparisons with a various number of nodes using the localization methods mentioned above. All results are shown in
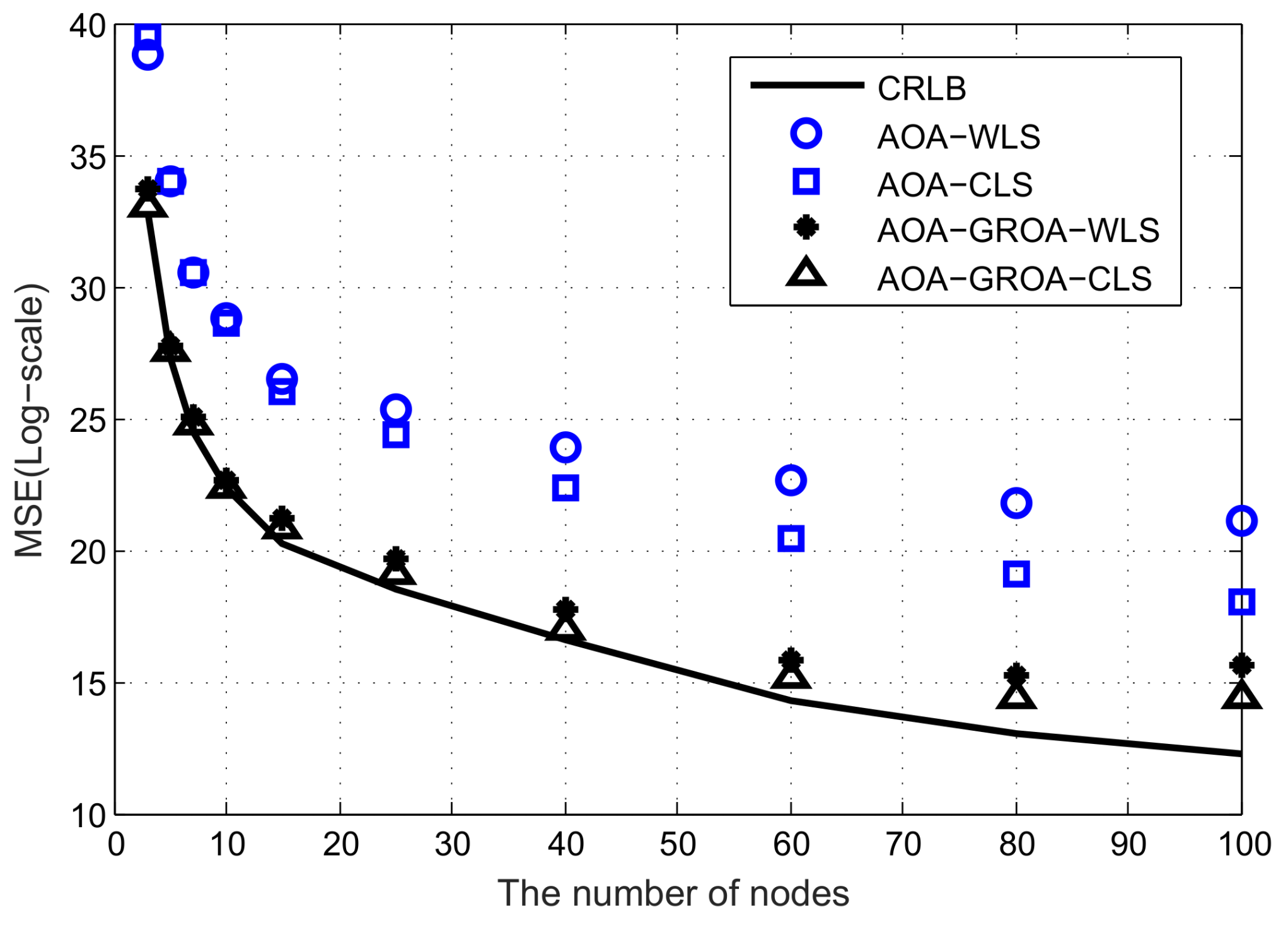
Figure 6 and
Figure 7.
Figure 6 compares the MSEs of the solutions, where the standard deviations of
,
and
are fixed at 10
−2 radian, 3 × 10
−3 and 10
−2 m, respectively.
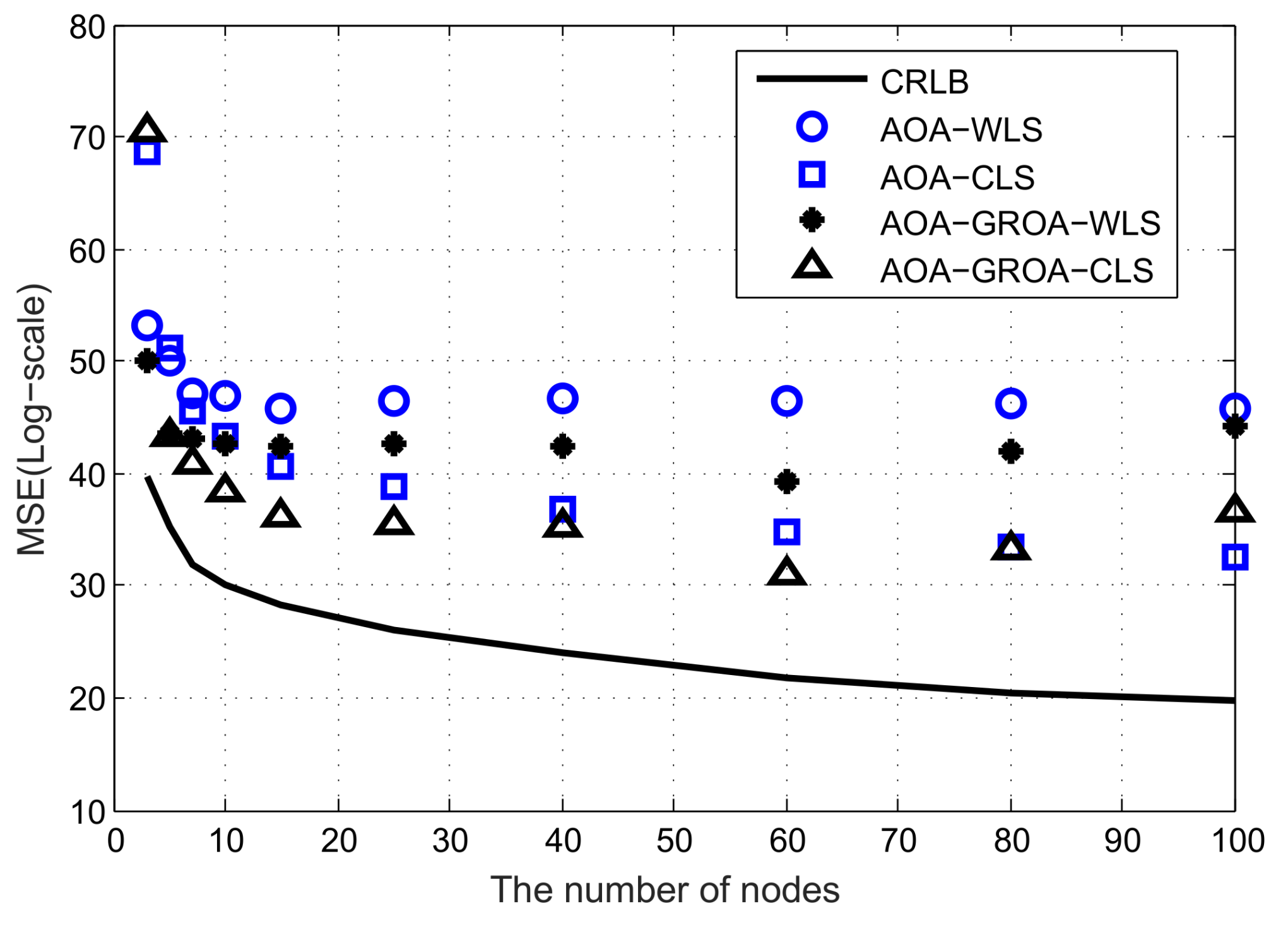
Figure 7 illustrates the
MSE performance, where the standard deviations of
,
and
are fixed at 0.05 radian, 3 × 10
−3 and 10
−2 m, respectively.
In these two figures, the localization algorithms appear to have better performance as the number of nodes increases. Note that the localization methods can significantly decrease MSE when the number of nodes is below 15. On the contrary, the localization algorithms improve performance very slowly when the number of nodes is above 20. A large number of nodes do not provide much benefit. For practical applications, we need to balance the costs of devices against their localization accuracy. If the localization accuracy is designated in advance, node selection is required to optimize the lifetime of ASNs and this will be our future work.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}