Parameter Estimation of Multiple Frequency-Hopping Signals with Two Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Only two sensors and associated receivers are implemented to estimate the parameters of multiple signals with time-varying frequencies by a moving array configuration.
- Multiple signals’ separation and DOA estimation are realized jointly, by decomposing a complicated multi-parameter optimization into several separated 1-D optimizations.
- Based on the ML principle, two DOA estimators are developed for ambiguity resolution and closed-form formulae of FH signals.
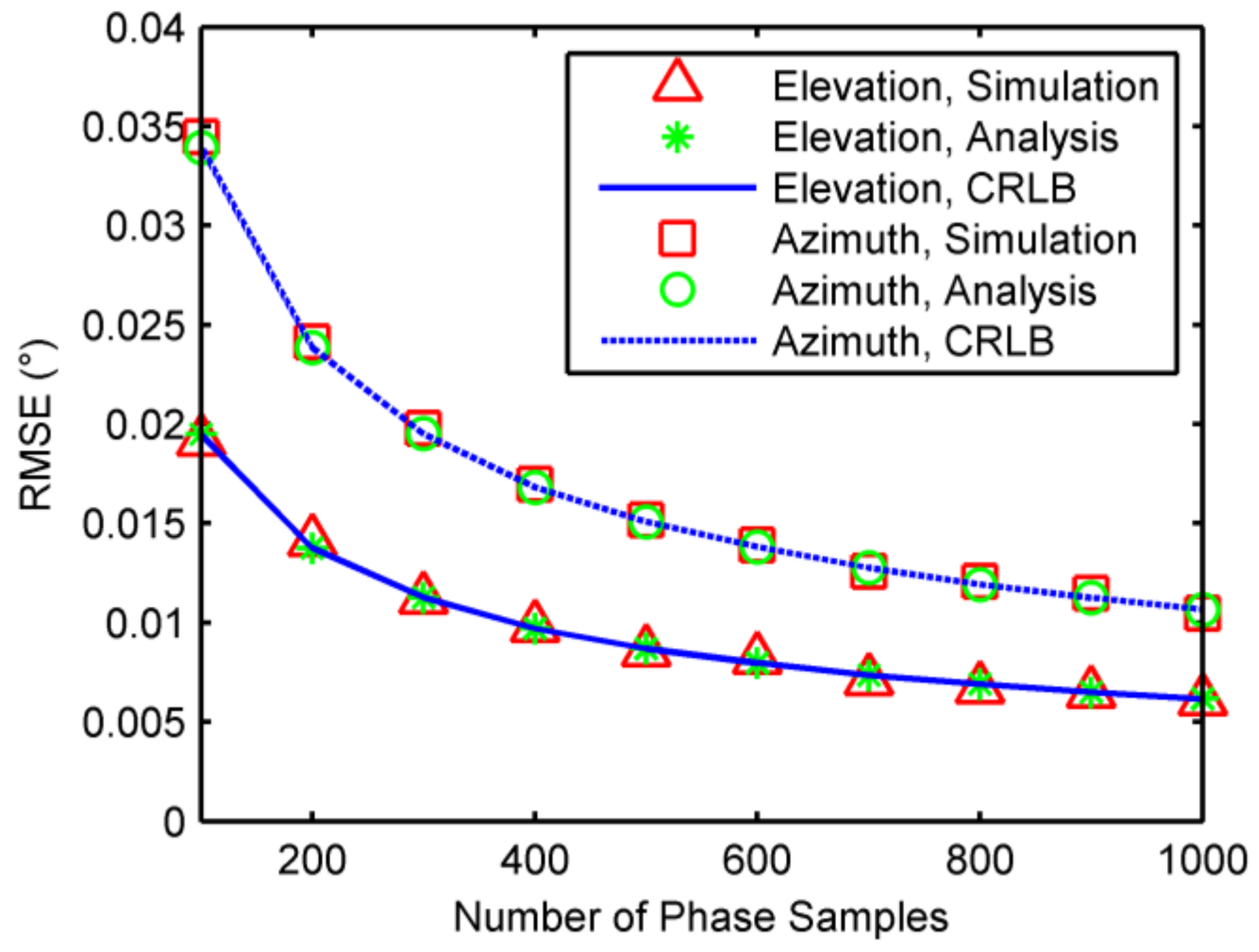
- Explicit estimation CRLBs are derived for non-uniform sampling of FH signals both for understanding the accuracy of a CSA and performance comparison.
2. Model Formulation
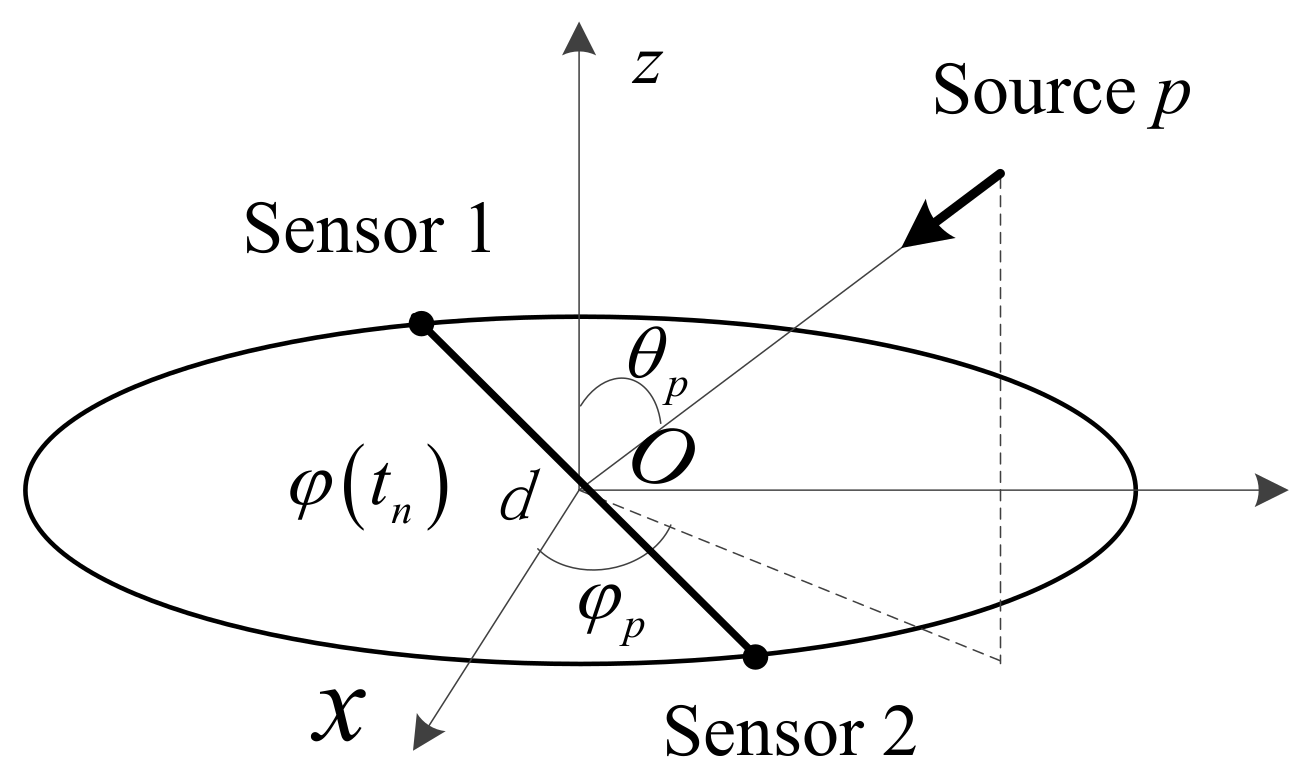
2.1. Circular Synthetic Aperture System Structure
2.2. Signal Model
3. DOA Estimation
3.1. Phase-Based ML Estimation of 2-D DOA
3.2. Ambiguity Resolution
4. Accuracy Analysis
4.1. DOA Estimation CRLB
4.2. Accuracy Analysis of the Phase-Based ML Estimator
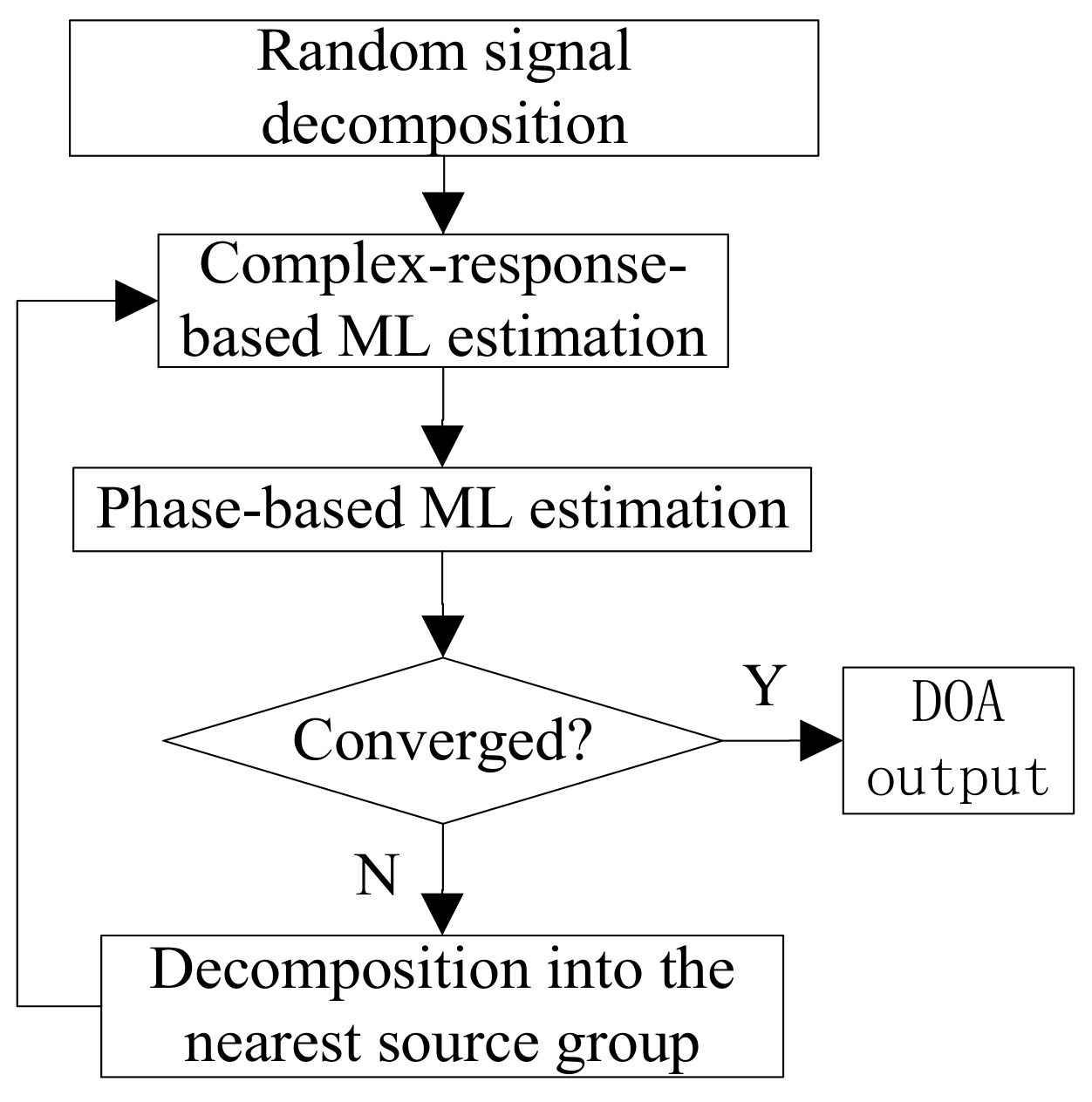
5. EM Algorithm
5.1. Expectation Step
5.2. Maximization Step
5.3. Full Algorithm Summary
6. Simulation Results
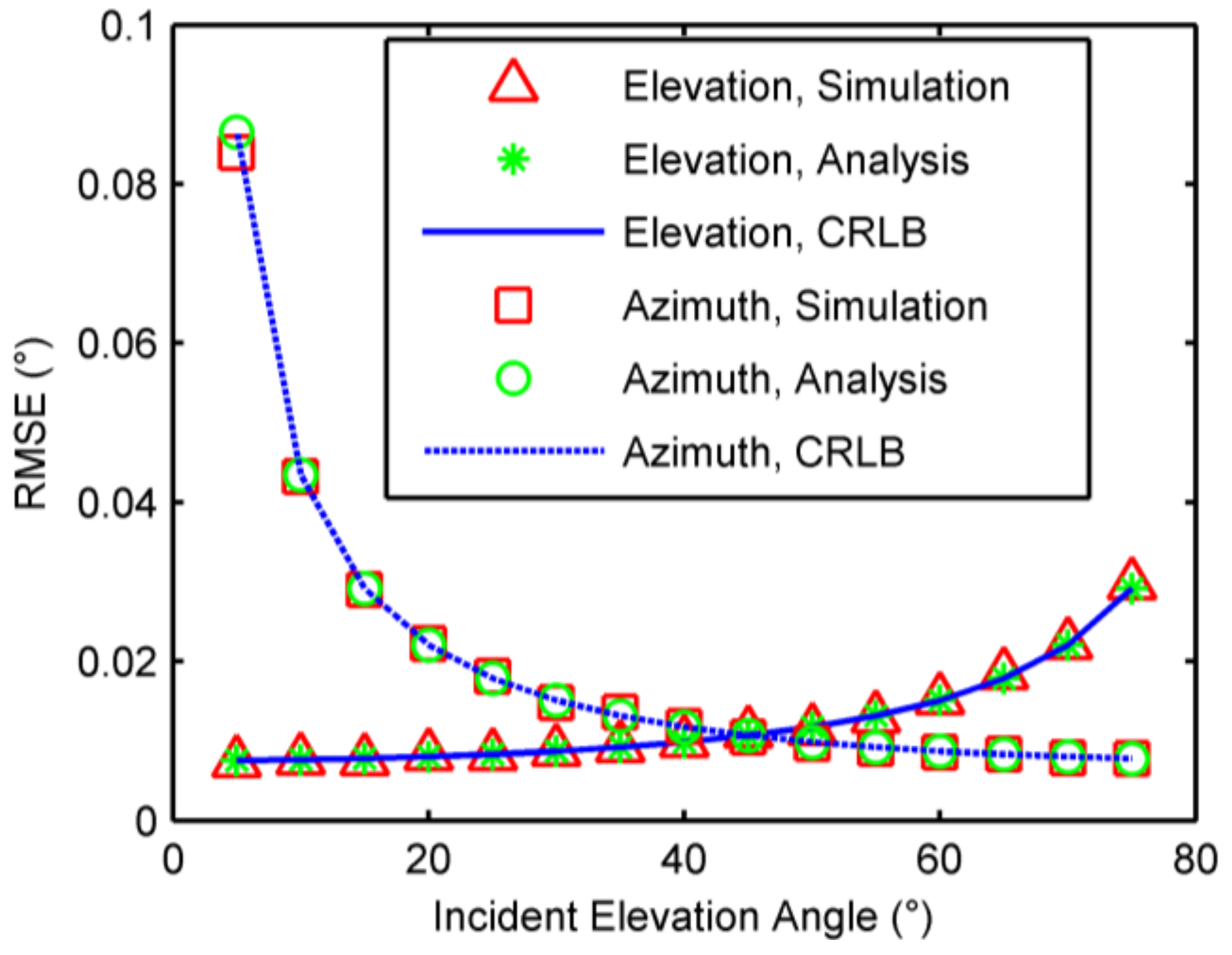
6.1. Single-Source Case
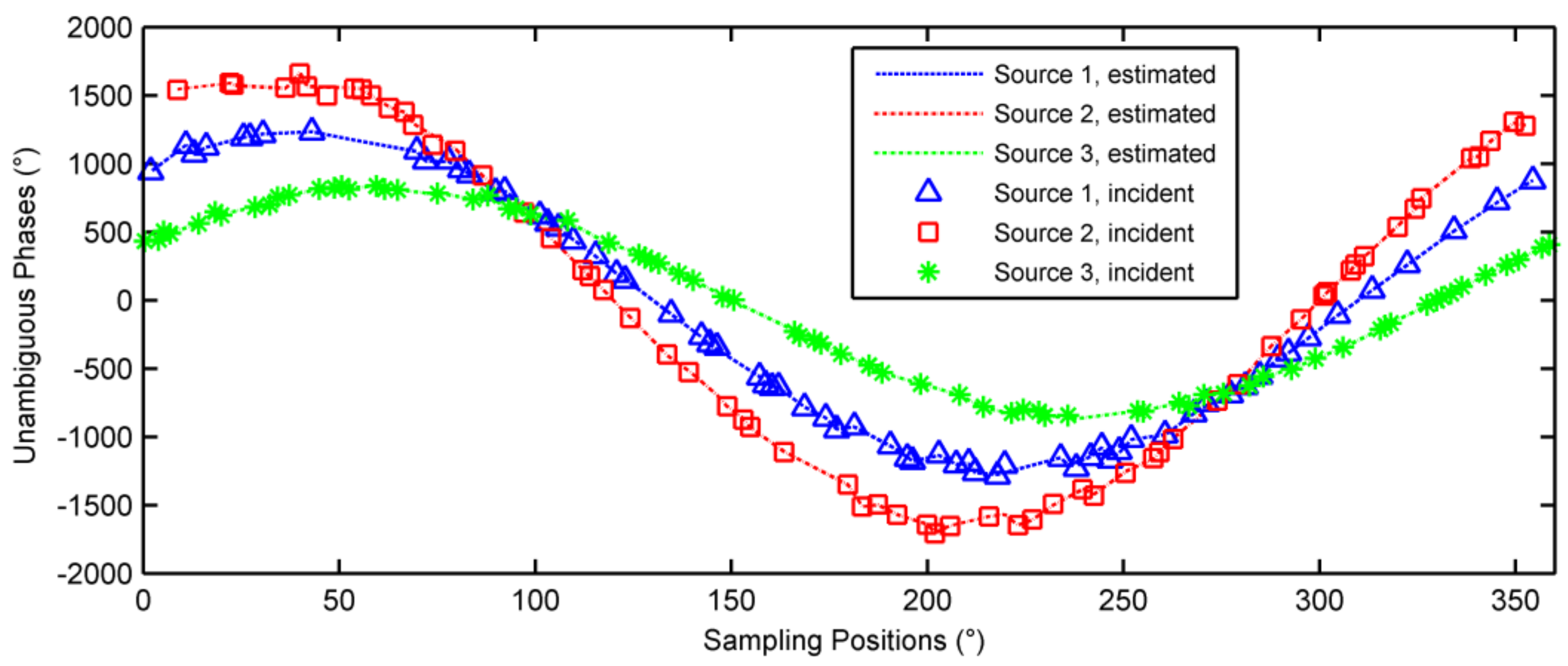
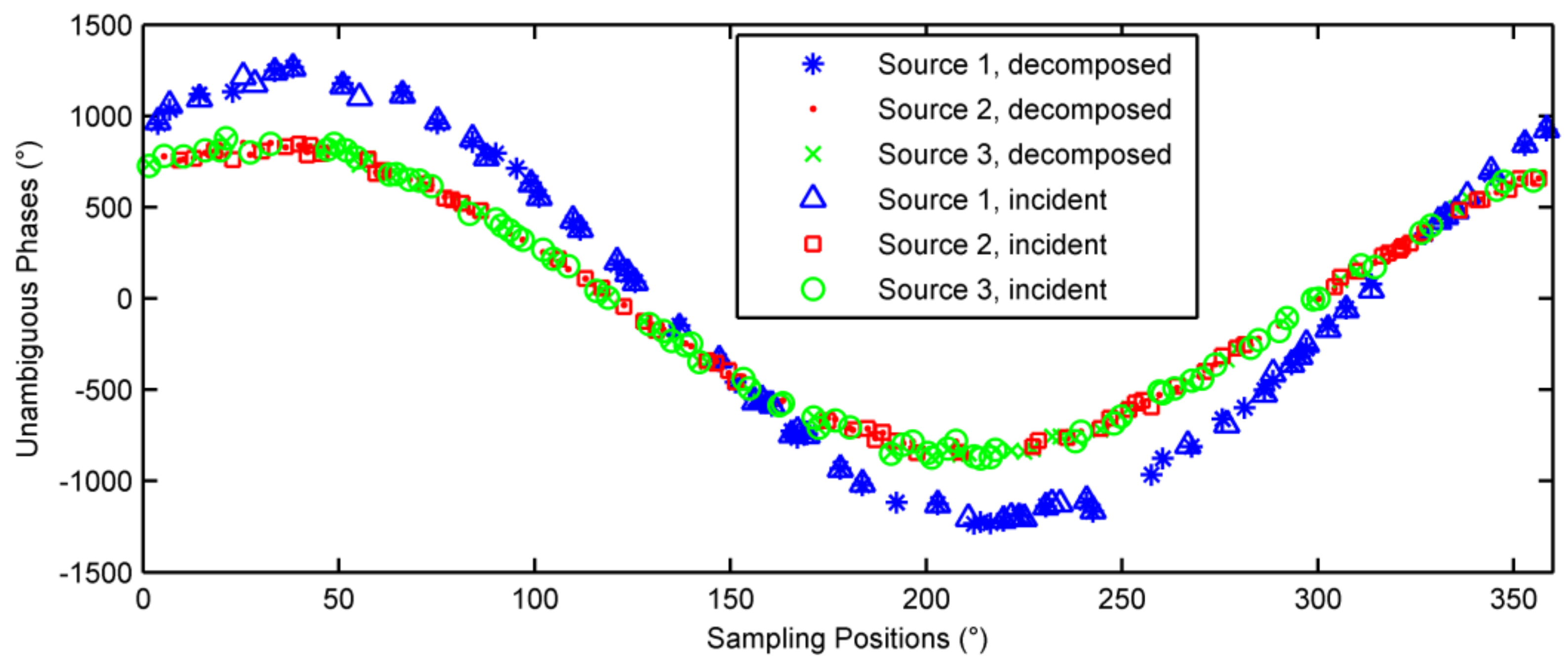
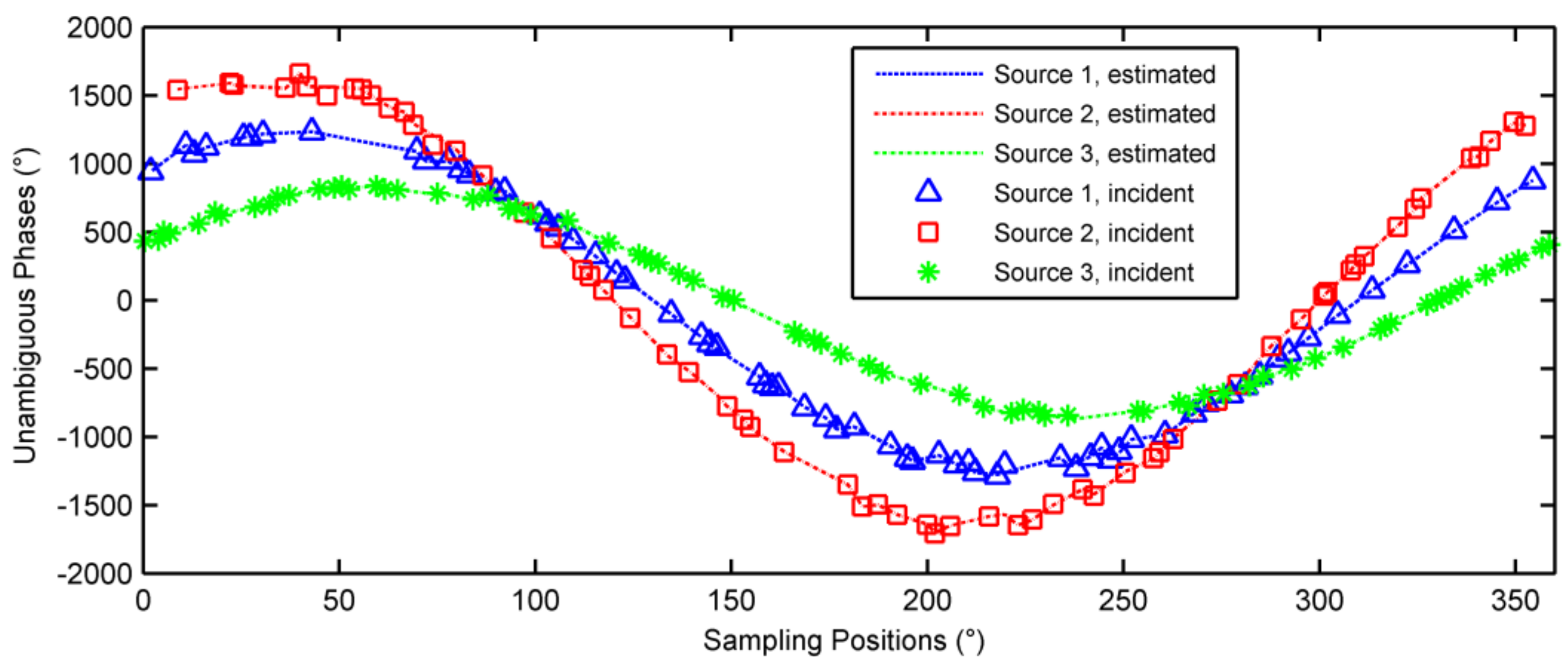
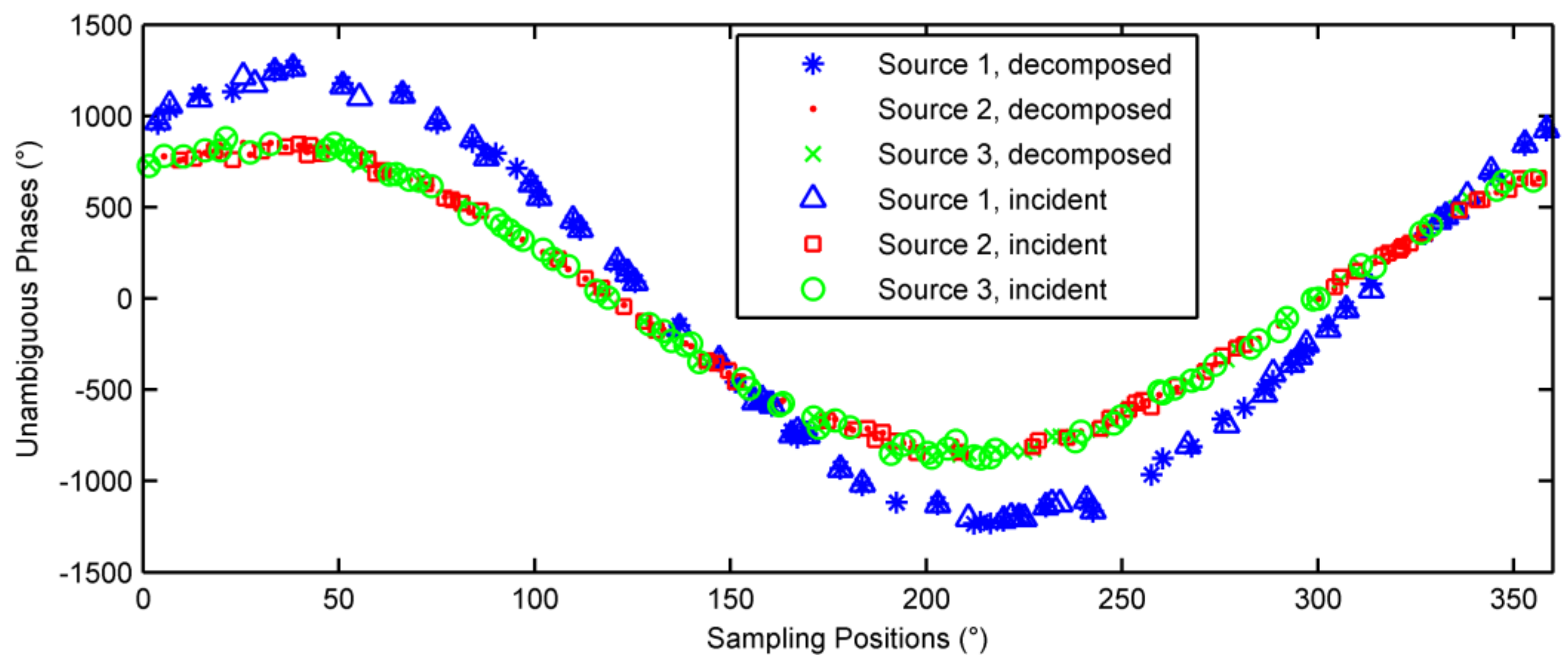
6.2. Multiple-Source Case
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Liu, W.; Weiss, S. Wideband Beamforming: Concepts and Techniques; Wiley Publishing: Oxford, UK, 2010; p. 302. [Google Scholar]
- Torrieri, D.J. Mobile frequency-hopping CDMA systems. IEEE Trans. Commun. 2000, 48, 1318–1327. [Google Scholar] [CrossRef]
- Bae, S.; Kim, S.; Kim, J. Efficient frequency-hopping synchronization for satellite communications using dehop-rehop transponders. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 261–274. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.; Yan, J. Direction of arrival estimation for off-grid signals based on sparse Bayesian learning. IEEE Sens. J. 2016, 16, 2004–2016. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, Y.; Jing, F. Underdetermined blind Source separation of synchronous orthogonal frequency hopping signals based on single source points detection. Sensors 2017, 17, 2074. [Google Scholar] [CrossRef] [PubMed]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Li, H.; Shen, Y.H.; Wang, J.G.; Ren, X.S. Estimation of the complex-valued mixing matrix by single-source-points detection with less sensors than sources. Trans. Emerg. Telecommun. Technol. 2012, 23, 137–147. [Google Scholar] [CrossRef]
- Liu, X.; Sidiropoulos, N.D.; Swami, A. Blind high-resolution localization and tracking of multiple frequency hopped signals. IEEE Trans. Signal Process. 2002, 50, 889–901. [Google Scholar]
- Sheinvald, J.; Wax, M. Direction finding with fewer receivers via time-varying preprocessing. IEEE Trans. Signal Process. 1999, 47, 2–9. [Google Scholar] [CrossRef]
- Sheinvald, J.; Wax, M. Joint hop timing and frequency estimation for collision resolution in FH networks. IEEE Trans. Wirel. Commun. 2005, 4, 3063–3074. [Google Scholar]
- Zhao, G.; Liu, Z.; Lin, J.; Shi, G.; Shen, F. Wideband DOA estimation based on sparse representation in 2-D frequency domain. IEEE Sens. J. 2015, 15, 227–233. [Google Scholar] [CrossRef]
- Liu, Z.M.; Huang, Z.T.; Zhou, Y.Y. An efficient maximum likelihood method for direction-of-arrival estimation via sparse Bayesian learning. IEEE Trans. Wirel. Commun. 2012, 11, 1–11. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Zhou, C.; Zhou, J. Direction-of-arrival estimation with coarray ESPRIT for coprime Array. Sensors 2017, 17, 1779. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Zhang, Y.; Lin, J.; Guo, R.; Chen, Z. Wideband direction of arrival estimation in the presence of unknown mutual coupling. Sensors 2017, 17, 230. [Google Scholar] [CrossRef] [PubMed]
- Guo, M.; Chen, T.; Wang, B. An improved DOA estimation approach using coarray interpolation and matrix denoising. Sensors 2017, 17, 1140. [Google Scholar] [CrossRef] [PubMed]
- Friedlander, B.; Zeira, A. Eigenstructure-based algorithms for direction finding with time-varying arrays. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 689–701. [Google Scholar] [CrossRef]
- Liu, Z.M. Direction-of-arrival estimation with time-varying arrays via Bayesian multitask learning. IEEE Trans. Veh. Technol. 2014, 63, 3762–3773. [Google Scholar] [CrossRef]
- Sheinvald, J.; Wax, M.; Meiss, A.J. Localization of multiple sources with moving arrays. IEEE Trans. Signal Process. 1998, 46, 2736–2743. [Google Scholar] [CrossRef]
- Kendra, J.R. Motion-extended array synthesis-part I: Theory and method. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2028–2044. [Google Scholar] [CrossRef]
- Autrey, S.W. Passive synthetic arrays. J. Acoust. Soc. Am. 1988, 84, 592–598. [Google Scholar] [CrossRef]
- Stergiopoulos, S.; Urban, H. A new passive synthetic aperture technique for towed arrays. IEEE J. Ocean. Eng. 1992, 17, 16–25. [Google Scholar] [CrossRef]
- Yen, N. A circular passive synthetic array: An inverse problem approach. IEEE J. Ocean. Eng. 1992, 17, 40–47. [Google Scholar] [CrossRef]
- Kawase, S. Radio interferometer for geosynchronous-satellite direction finding. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 443–449. [Google Scholar] [CrossRef]
- Lan, X.; Wan, L.; Han, G.; Rodrigues, J.J.P.C. Novel DOA estimation algorithm using array rotation technique. Future Internet 2014, 6, 155–170. [Google Scholar] [CrossRef]
- Liu, Z.M.; Guo, F.C. Azimuth and elevation estimation with rotating long-baseline interferometers. IEEE Trans. Signal Process. 2015, 63, 2405–2419. [Google Scholar] [CrossRef]
- Feder, M.; Weinstein, E. Parameter estimation of superimposed signals using the EM algorithm. IEEE Trans. Acoust. Speech Signal Process. 1988, 36, 477–489. [Google Scholar] [CrossRef]
- Borran, M.J.; Nasiri-Kenari, M. An efficient detection technique for synchronous CDMA communication systems based on the expectation maximization algorithm. IEEE Trans. Veh. Technol. 2000, 49, 1663–1668. [Google Scholar] [CrossRef]
- Georghiades, C.N.; Snyder, D.L. The expectation-maximization algorithm for symbol unsynchronized sequence detection. IEEE Trans. Commun. 1991, 39, 54–61. [Google Scholar] [CrossRef]
- Liu, X.; Li, J.; Ma, X. An EM algorithm for blind hop timing estimation of multiple FH signals using an array system with bandwidth mismatch. IEEE Trans. Veh. Technol. 2007, 56, 2545–2554. [Google Scholar] [CrossRef]
- Ko, C.C.; Zhi, W.; Chin, F. ML-based frequency estimation and synchronization of frequency hopping signal. IEEE Trans. Signal Process. 2005, 53, 403–410. [Google Scholar] [CrossRef]
- Chung, P.J.; Bohme, J.F.; Hero, A.O. Tracking of multiple moving sources using recursive EM algorithm. EURASIP J. Appl. Signal Process. 2005, 1, 50–60. [Google Scholar] [CrossRef]
- Frenkel, L.; Feder, M. Recursive expectation-maximization (EM) algorithms for time-varying parameters with applications to multiple target tracking. IEEE Trans. Signal Process. 1999, 47, 306–320. [Google Scholar] [CrossRef]
- Mada, K.K.; Wu, H.C.; Iyengar, S.S. Efficient and robust EM algorithm for multiple wideband source localization. IEEE Trans. Veh. Technol. 2009, 58, 3071–3075. [Google Scholar] [CrossRef]
- Lu, L.; Wu, H.C. Robust Expectation–maximization direction-of-arrival estimation algorithm for wideband source signals. IEEE Trans. Veh. Technol. 2011, 60, 2395–2400. [Google Scholar] [CrossRef]
- Wu, Y.W.; Rhodes, S.; Satorius, E.H. Direction of arrival estimation via extended phase interferometry. IEEE Trans. Aerosp. Electron. Syst. 1995, 31, 375–381. [Google Scholar]
- Jacobs, E.; Ralston, E.W. Ambiguity resolution in interferometry. IEEE Trans. Aerosp. Electron. Syst. 1981, 17, 766–780. [Google Scholar] [CrossRef]
- Sundaram, K.R.; Mallik, R.K.; Murthy, U.M.S. Modulo conversion method for estimating the direction of arrival. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1391–1396. [Google Scholar]
- Lee, J.H.; Woo, J.M. Interferometer direction-finding system with improved DF accuracy using two different array configurations. IEEE Antennas Wirel. Propag. Lett. 2014, 14, 719–722. [Google Scholar] [CrossRef]
- Mcaulay, R. Interferometer design for elevation angle estimation. IEEE Trans. Aerosp. Electron. Syst. 1977, 13, 486–503. [Google Scholar] [CrossRef]
- Kay, S.M. A fast and accurate single frequency estimator. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 1987–1990. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Zuo, L.; Pan, J.; Ma, B. Fast DOA estimation in the spectral domain and its applications. Prog. Electromagn. Res. Method 2018, 66, 73–85. [Google Scholar]
- Drineas, P.; Frieze, A.; Kannan, R. Clustering large graphs via the singular value decomposition. Mach. Learn. 2004, 56, 9–33. [Google Scholar] [CrossRef]




© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, L.; Pan, J.; Ma, B. Parameter Estimation of Multiple Frequency-Hopping Signals with Two Sensors. Sensors 2018, 18, 1088. https://doi.org/10.3390/s18041088
Zuo L, Pan J, Ma B. Parameter Estimation of Multiple Frequency-Hopping Signals with Two Sensors. Sensors. 2018; 18(4):1088. https://doi.org/10.3390/s18041088
Chicago/Turabian StyleZuo, Le, Jin Pan, and Boyuan Ma. 2018. "Parameter Estimation of Multiple Frequency-Hopping Signals with Two Sensors" Sensors 18, no. 4: 1088. https://doi.org/10.3390/s18041088
APA StyleZuo, L., Pan, J., & Ma, B. (2018). Parameter Estimation of Multiple Frequency-Hopping Signals with Two Sensors. Sensors, 18(4), 1088. https://doi.org/10.3390/s18041088