A Semantic-Based Gas Source Localization with a Mobile Robot Combining Vision and Chemical Sensing

 , , , , and
, , , , and
Abstract
1. Introduction
2. Related Work
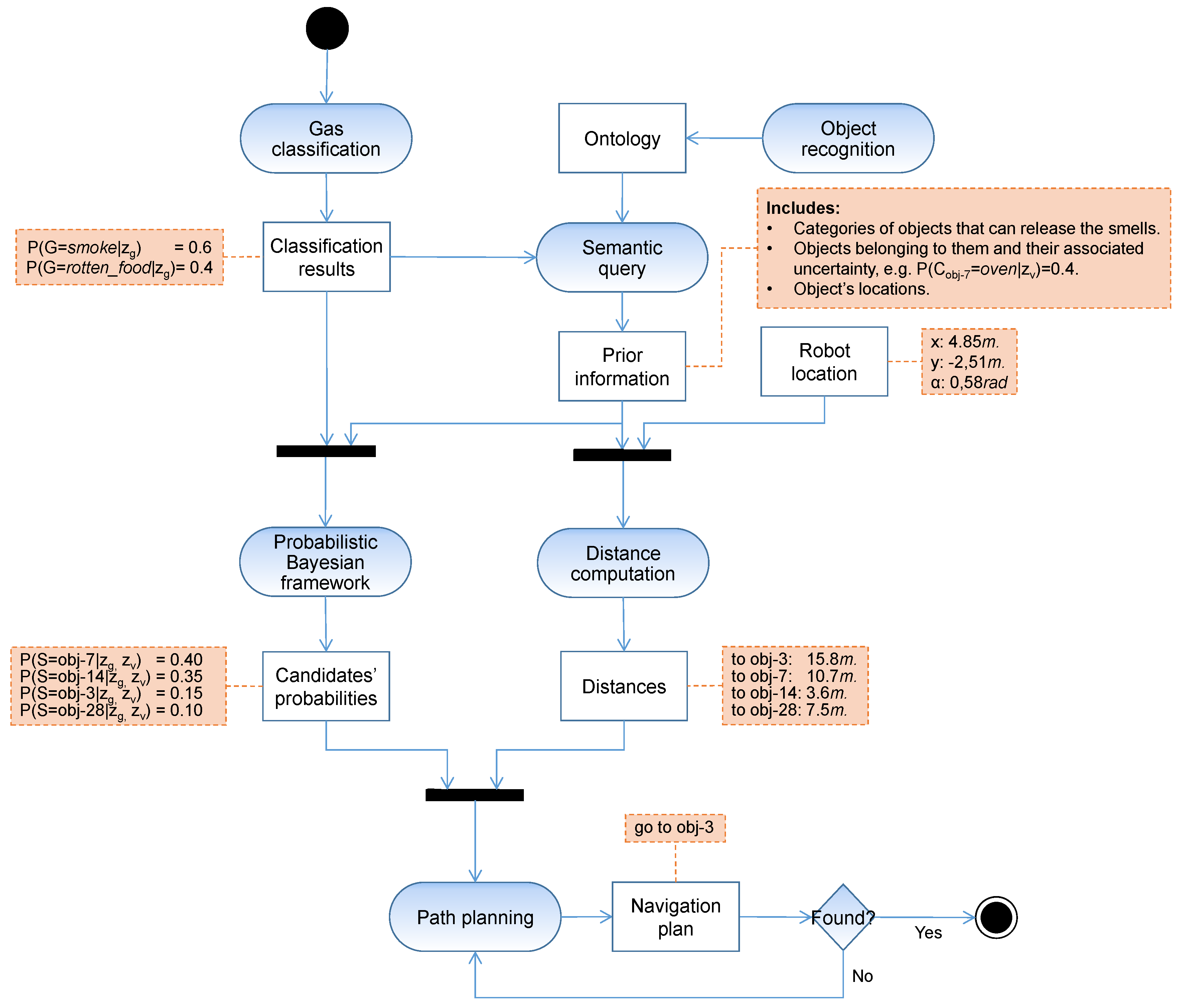
3. System Description
- is a certain gas measurement from the e-nose characterized through a vector of l features.
- is an observation of an object from the camera characterized by m features.
- models the gas class and takes values on the set of possible gases.
- stands for the category of a candidate object, assigning to it a value from the set of categories.
- stands for the gas source, taking values on the set of objects perceived so far in the environment.
3.1. Gas Detection and Classification
3.2. Object Detection and Recognition
3.3. Ontologies and Semantic Queries
3.4. Fusing Information with the Bayesian Probabilistic Framework
3.5. Dynamic System Update
- Passive Search: The first and more straightforward strategy consists of continuously and permanently detecting and recognizing objects with the on-board perception system (i.e., a RGB-D camera) as the robot searches for the source. Since object recognition algorithms are computationally heavy, and assuming that the robot moves, on average, at low speeds, we can safely execute this task at a low rate (e.g., 1 Hz) maintaining a high detection rate.
- Active Search: The second strategy is triggered when the e-nose measures a concentration level of the target gas that exceed a configurable threshold. At this moment, the robot will hold the current source-search, and carry out an active exploration of the surroundings. The main difference with the passive search is that, in this mode, the robot movements are controlled to inspect the surroundings, while in the passive mode are not. In this work, we propose an inspection pattern described by the following sequence of movements:
- Perform a pure rotation.
- Randomly navigate to a location within a square area centered on the location where the gas hit was observed.
- Repeat Steps 1 and 2 N times.
The number of random navigations to carry out (N) as well as the size (M) of the area to search are parameters that must be set according to the workspace. For example, for the real experiments carried out in Section 5, we selected and m. Finally, to avoid repetitive calls to this active search behavior (e.g., in the surroundings of the gas source where high concentrations are expected to be measured), a timeout parameter is set that ensures a minimum time between two consecutive calls.
3.6. Path Planning with Markov Decision Processes
- A state s is fully determined by a 2D robot location in the workspace (i.e., the coordinates), a flag indicating if the current state is goal (i.e., the candidate is the gas source), and the list of objects not inspected yet.
- An action a represents the robot navigation from to , and the validation of to be the source (true/false).
- The transition function T codifies the probability of an inspected object to be the gas source. Given that an action a involves inspecting a particular object location (), the function T determines the probability of finding the gas source after executing the action a.
- S(γ) is a tree-based representation of the problem state space when all possible actions a are executed for a given list of object locations, within a finite time-horizon specified by .
- The reward function R depends on the action a that was executed as well as on the reward of the previous state. That is, it evaluates the reward of visiting a particular object location and finding out whether it is the gas source, also considering the cost of the decisions taken before reaching that state. The parameters used to specify it are the navigation and validation times for the previous and current states, and a bonus value the system receives if the inspected object is the gas source.
4. System Evaluation
- The gas source, randomly selecting an object to be the gas source from the list of objects in the environment.
- The class of the released gas, simulating a gas dispersion in accordance with the types of gases the selected source can emit.
- The initial robot location, selecting a random pose within the simulated environment.
- The gas classification probabilities, evaluating the robustness of the different search strategies for a decreasing success in the gas classification. To do so, we defined the ambiguity factor in [30] as , where is the classification probability assigned to the gas being released. That is, models the ratio between the probabilities assigned to the other gas classes and the probability of the gas being released, providing values close to zero for good classifications, and high values for bad, ambiguous ones. Furthermore, we also report an average case where the classification probabilities were randomized in the range , that is, from very accurate to complete failure.
- The greedy-d approach, being independent of the object categorization and gas classification results, outperforms the random case, especially with respect the travelled distance. However, both approaches lead to long searches (over 5 min for the tested environment).
- Introducing the semantics framework to generate the probability ordered list of candidates notably reduces the number of visited objects, and consequently the overall search time (see semantic-p). This is specially noticeable when the ambiguity in the gas classification is low.
- In general, when a trade-off between source probability and navigation cost is considered, the search time reduces. An exception is the semantic-cost approach, which seems to yield better results only when there is high ambiguity in the gas classification (see bottom row in Table 1). This suggests that fusing source probability with navigation costs is not straightforward.
- The proposed semantic-mdp approach provides the best results overall, independently of the gas classification ambiguity, achieving search times below 2 min in most cases.
5. Real Experiment
5.1. Experimental Setup
5.2. The Robot and the Gas Source
5.3. Experimental Results
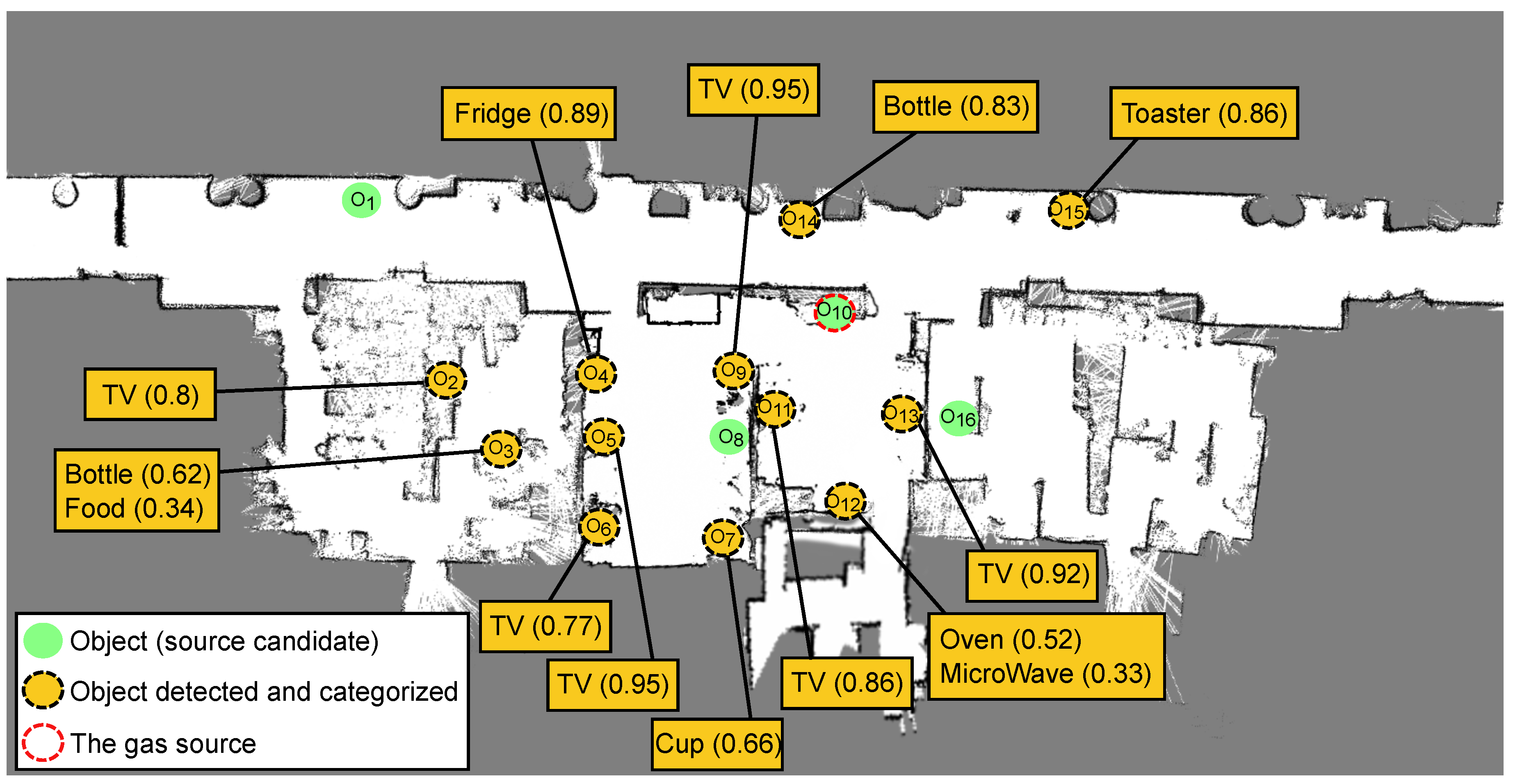
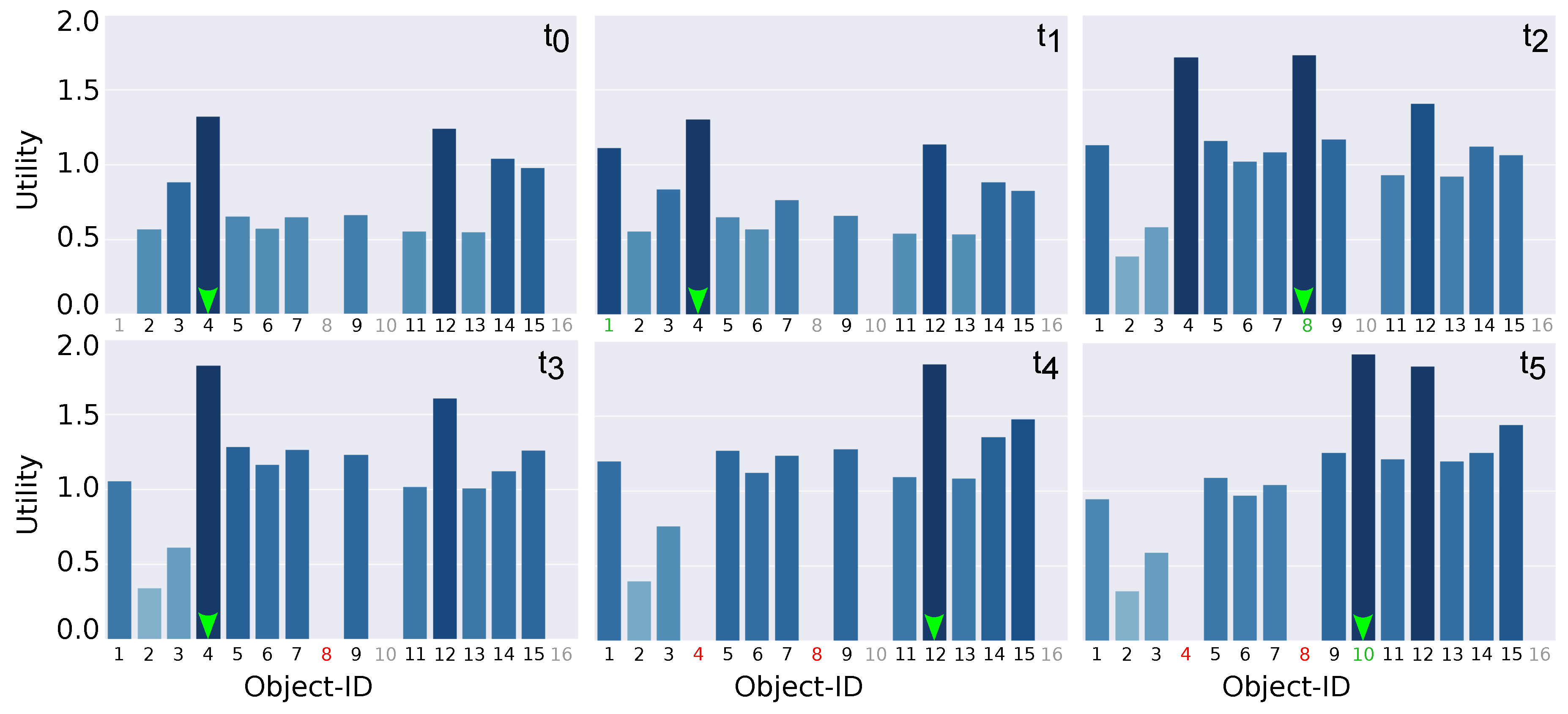
- : The first task carried by the robot, once the search was triggered, was the classification of the detected gas. Using a Naive–Bayes classifier and the MOX-based e-nose mounted on the robot, the system classified the gas leak with the following probabilities: 0.56 (smoke), 0.28 (gas) and 0.16 (rotten_food). Notice that this ambiguity in the gas classification led to objects not potentially releasing smoke (e.g., an apple) to be considered as possible source candidates, naturally with less probability. Recall that, if the classification is erroneous or too ambiguous, the search process may suffer from important delays, as depicted in Table 1.Once the gas was classified, the system estimated the utility of each object candidate. However, in this step, only 12 out of the 16 objects in the environment were considered. This led to only 12 objects being assigned a utility by the MDP, as can be seen in Figure 8. With this limited knowledge, the system selected Object-4 as the next candidate to check and started navigating towards it.
- : A few seconds later, the vision system detected an apple (Object-1) and categorized it as Food with a belief of . This new object was automatically introduced as a source candidate and the MDP was re-run. As can be seen in Figure 8, Object-1 was now assigned with a utility value. Despite Food not being a category likely to release smoke, the uncertainty in the gas classification together with its proximity to the current robot location led to a relatively high utility (third best candidate). However, the best candidate remaind Object-4, so the navigation remained unaltered.
- : Once the robot left the corridor and entered one of the rooms present in the environment, it detected a new object (Object-8) which was categorized as Oven with a belief of . As in the previous case, the object was introduced as a potential candidate and the MDP was re-run. In this case, the new object was estimated to have the highest utility among the current candidates, so the robot pleace the current navigation to Object-4 on hold, and started a new one to Object-8.
- : Once the navigation to Object-8 was completed, the system validated that it was not the gas source. As in most gas source localization works, we did not face a real validation stage (a generally complex process involving several measurements and assumptions about the wind flows in the environment), but assumed the robot could accurately carry out this task. Therefore, Object-8 was removed from the list of candidates and the next object in the list with the highest utility was selected. In this case, Object-4 was re-selected as the most promising object to check. Notice that, since the robot had changed its location, the utilities of all objects vary, being necessary to update their values.
- : Object-4 was a storage cupboard miss-categorized by the recognition system as a Fridge. Naturally, once the robot reached the object, it was determined that it was not the gas source. After removing Object-4 from the list and updating all the remaining object utilities, the next selected candidate was Object-12.
- : On its way to Object-12, the robot detected a new candidate (Object-10) and categorized it as Fridge with a 0.98 belief. Given the proximity to the current robot location and the fact that Fridges are likely to release smoke (see Table 2), it became the candidate with the highest utility, and a new navigation was commanded to check it (placing the navigation to Object-12 on hold). Once the robot reached Object-12 location, we assumed the gas source had located and the experiment concluded.
6. Discussion
- Object Recognition: The proposed GSL system relies on a set of object candidates found in the environment to solve the GSL problem. Therefore, the detection and categorization of these objects play a fundamental role in the final performance of the system. The main issues to handle are twofold: (i) objects not detected; and (ii) objects detected but incorrectly categorized.The former is a critical problem since non-detected objects will never be considered as potential gas sources (independently of the gas released or the provided expert knowledge). Again, two situations may arise: an object has not yet been observed (e.g., it was introduced after the initial robot inspection, it was occluded by other objects, etc.) or the object was observed but the recognition system failed to detect it (something that highly depends on the detection method employed, being mandatory to use a well tuned method able to robustly detect the object categories relevant to the problem at hand). Our approach is robust against the former by implementing different dynamic object detection modes which allow the robot to consider new objects (recall Section 3.5). For example, if the gas source is not found after checking all the candidates in the list, a full search should be commanded to look for new objects not previously detected.The second issue is the miscategorization of a detected object. Regardless of the performance of the chosen visual detection sub-system, categorization errors are to be expected in real world environments and, therefore, the system should to be able to deal with them. This is the main reason for not considering deterministic categorization methods but probabilistic ones. The latter provide a probability for each object category instead of Boolean values (i.e., 0 or 1). Therefore, even when failing to determine the object category (usually the label with the highest probability), our GSL approach will keep the object as a source candidate. The downside of assigning low probabilities to the correct object categories is an efficiency drop in the source-probability estimation phase, leading to longer inspection times. In any case, the system will eventually locate the correct gas source, though the system efficiency in terms of search time would be downgraded.
- Gas Classification: Similar to the object detection sub-system, a proper and accurate classification of the gas whose source is to be located largely affects the system efficiency. As illustrated in Section 4, when the gas classification fails, the overall search time increases, being necessary to visit a higher number of candidates before locating the gas source. However, as long as the probability assigned to the correct gas class is non-zero, the true gas source will eventually be located by the proposed approach.Finally, we need to highlight the importance of properly designing the e-nose system to react to the concentration ranges to be expected in the application. As with the detection of objects, an e-nose unable to detect the presence of a gas spread in the environment (e.g., because its minimum detection limit is higher than the gas concentration) will lead to a complete failure, not even triggering the search process. In this sense, it must be stressed that this limitation is not present only in our approach, but shared by all the methods that rely on sensor measurements to solve the GSL problem.
- Expert Knowledge: The proposed system contemplates expert knowledge in the form of conditional probabilities to link object categories with gas classes. In a nutshell, the system exploits knowledge about which object categories are likely to release each gas class. As any other method built upon knowledge from an expert, our approach requires this knowledge to be updated according to the application. For example, in the experiments shown above, we used the conditional probabilities depicted in Table 2 to illustrate our knowledge in the office-like scenario, but, if the system were to be used for explosive detection, then the conditional probabilities should be replaced to uniform ones along all object categories, indicating that all objects are potentially candidates to hide explosive substances. Besides, taking into consideration the limitations when materializing the expert knowledge as simple conditional probabilities, we can find situations where this semantic information is not accurate or even misleading. Once again, the only “fatal” situation in which errors in such probabilities would lead to a complete failure of our approach are those where absolute zero probabilities were assigned to some object–gas combination. Therefore, the final responsibility lies on the expert to properly assign the values to represent its knowledge about the objects and gases in the system.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kam, M.; Zhu, X.; Kalata, P. Sensor fusion for mobile robot navigation. Proc. IEEE 1997, 85, 108–119. [Google Scholar] [CrossRef]
- Kowadlo, G.; Russell, R.A. Robot odor localization: A taxonomy and survey. Int. J. Robot. Res. 2008, 27, 869–894. [Google Scholar] [CrossRef]
- Forsyth, D.; Ponce, J. Computer Vision: A Modern Approach; Prentice Hall: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Sanchez-Garrido, C.; Monroy, J.; Gonzalez-Jimenez, J. A Configurable Smart E-Nose for Spatio-Temporal Olfactory Analysis. IEEE Sens. 2014, 1968–1971. [Google Scholar] [CrossRef]
- Marques, L.; Almeida, N.; De Almeida, A. Olfactory sensory system for odour-plume tracking and localization. IEEE Sens. 2003, 1, 418–423. [Google Scholar] [CrossRef]
- Lochmatter, T.; Martinoli, A. Theoretical analysis of three bio-inspired plume tracking algorithms. IEEE Int. Conf. Robot. Autom. 2009, 2661–2668. [Google Scholar] [CrossRef]
- Vergassola, M.; Villermaux, E.; Shraiman, B.I. Infotaxis as a strategy for searching without gradients. Nature 2007, 445, 406–409. [Google Scholar] [CrossRef] [PubMed]
- Li, J.G.; Meng, Q.H.; Wang, Y.; Zeng, M. Odor source localization using a mobile robot in outdoor airflow environments with a particle filter algorithm. Auton. Robot. 2011, 30, 281–292. [Google Scholar] [CrossRef]
- Ishida, H.; Tanaka, H.; Taniguchi, H.; Moriizumi, T. Mobile robot navigation using vision and olfaction to search for a gas/odor source. Auton. Robot. 2006, 20, 231–238. [Google Scholar] [CrossRef]
- Uschold, M.; Gruninger, M. Ontologies: principles, methods and applications. Knowl. Eng. Rev. 1996, 11, 93–136. [Google Scholar] [CrossRef]
- Monroy, J.; Hernandez-Bennetts, V.; Fan, H.; Lilienthal, A.; Gonzalez-Jimenez, J. GADEN: A 3D Gas Dispersion Simulator for Mobile Robot Olfaction in Realistic Environments. Sensors 2017, 17, 1479. [Google Scholar] [CrossRef] [PubMed]
- Lochmatter, T.; Martinoli, A. Tracking Odor Plumes in a Laminar Wind Field with Bio-inspired Algorithms. In Experimental Robotics. Springer Tracts in Advanced Robotics; Khatib, O., Kumar, V., Pappas, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 54, pp. 473–482. [Google Scholar]
- Pearce, T.C.; Schiffman, S.S.; Nagle, H.T.; Gardner, J.W. Handbook of Machine Olfaction: Electronic Nose Technology; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar] [CrossRef]
- Gongora, A.; Monroy, J.; Gonzalez-Jimenez, J. Gas Source Localization Strategies for Teleoperated Mobile Robots: An Experimental Analysis. In Proceedings of the European Conference on Mobile Robotics (ECMR), Paris, France, 6–8 September 2017. [Google Scholar]
- Loutfi, A.; Coradeschi, S.; Karlsson, L.; Broxvall, M. Putting olfaction into action: Using an electronic nose on a multi-sensing mobile robot. Int. Conf. Intell. Robot. Syst. 2004, 1, 337–342. [Google Scholar]
- Wiedemann, T.; Manss, C.; Shutin, D.; Lilienthal, A.J.; Karolj, V.; Viseras, A. Probabilistic modeling of gas diffusion with partial differential equations for multi-robot exploration and gas source localization. In Proceedings of the 2017 European Conference on Mobile Robots (ECMR), Paris, France, 6–8 September 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Neumann, P.P.; Hernandez Bennetts, V.; Lilienthal, A.J.; Bartholmai, M.; Schiller, J.H. Gas source localization with a micro-drone using bio-inspired and particle filter-based algorithms. Adv. Robot. 2013, 27, 725–738. [Google Scholar] [CrossRef]
- Kobayashi, T.; Nagai, H.; Chino, M.; Kawamura, H. Source term estimation of atmospheric release due to the Fukushima Dai-ichi Nuclear Power Plant accident by atmospheric and oceanic dispersion simulations. J. Nuclear Sci. Technol. 2013, 50, 255–264. [Google Scholar] [CrossRef]
- Rao, K.S. Source estimation methods for atmospheric dispersion. Atmos. Environ. 2007, 41, 6964–6973. [Google Scholar] [CrossRef]
- Hutchinson, M.; Liu, C.; Chen, W. Information-Based Search for an Atmospheric Release Using a Mobile Robot: Algorithm and Experiments. IEEE Trans. Control Syst. Technol. 2018, 1–15. [Google Scholar] [CrossRef]
- Sanchez-Garrido, C.; Monroy, J.; Gonzalez-Jimenez, J. Probabilistic Estimation of the Gas Source Location in Indoor Environments by Combining Gas and Wind Observations. In Applications of Intelligent Systems. Frontiers on Artificial Intelligence and Applications; IOS Press: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Monroy, J.; Blanco, J.L.; Gonzalez-Jimenez, J. Time-Variant Gas Distribution Mapping with Obstacle Information. Auton. Robot. 2016, 40, 1–16. [Google Scholar] [CrossRef]
- Bennetts, V.H.; Schaffernicht, E.; Stoyanov, T.; Lilienthal, A.J.; Trincavelli, M. Robot assisted gas tomography—Localizing methane leaks in outdoor environments. IEEE Int. Conf. Robot. Autom. 2014, 6362–6367. [Google Scholar] [CrossRef]
- Marjovi, A.; Marques, L. Multi-robot odor distribution mapping in realistic time-variant conditions. IEEE Int. Conf. Robot. Autom. 2014, 3720–3727. [Google Scholar] [CrossRef]
- Li, F.; Meng, Q.H.; Sun, J.W.; Bai, S.; Zeng, M. Single odor source declaration by using multiple robots. AIP Conf. Proc. 2009, 1137, 73–76. [Google Scholar] [CrossRef]
- Cabrita, G.; Marques, L. Divergence-based odor source declaration. In Proceedings of the 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Lilienthal, A.; Ulmer, H.; Frohlich, H.; Stutzle, A.; Werner, F.; Zell, A. Gas source declaration with a mobile robot. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1430–1435. [Google Scholar] [CrossRef]
- Schleif, F.M.; Hammer, B.; Monroy, J.; Gonzalez-Jimenez, J.; Blanco, J.L.; Biehl, M.; Petkov, N. Odor recognition in robotics applications by discriminative time-series modeling. Pattern Anal. Appl. 2016, 19, 207–220. [Google Scholar] [CrossRef]
- Bennetts, V.H.; Schaffernicht, E.; Sese, V.P.; Lilienthal, A.J.; Trincavelli, M. A novel approach for gas discrimination in natural environments with Open Sampling Systems. IEEE Sens. 2014, 2046–2049. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. Building Multiversal Semantic Maps for Mobile Robot Operation. Knowl.-Based Syst. 2017, 119, 257–272. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. A survey on learning approaches for Undirected Graphical Models. Application to scene object recognition. Int. J. Approx. Reason. 2017, 83, 434–451. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv, 2018; arXiv:1804.02767. [Google Scholar]
- Censi, A.; Franchi, A.; Marchionni, L.; Oriolo, G. Simultaneous Calibration of Odometry and Sensor Parameters for Mobile Robots. IEEE Trans. Robot. 2013, 29, 475–492. [Google Scholar] [CrossRef]
- Günther, M.; Ruiz-Sarmiento, J.; Galindo, C.; González-Jiménez, J.; Hertzberg, J. Context-aware 3D object anchoring for mobile robots. Robot. Auton. Syst. 2018, 110, 12–32. [Google Scholar] [CrossRef]
- Puterman, M.L. Markov Decision Processes: Discrete Stochastic Dynamic Programming; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Fentanes, J.P.; Lacerda, B.; Krajník, T.; Hawes, N.; Hanheide, M. Now or later? predicting and maximising success of navigation actions from long-term experience. IEEE Int. Conf. Robot. Autom. 2015, 1112–1117. [Google Scholar] [CrossRef]
- Monroy, J.; Ruiz-Sarmiento, J.R.; Moreno, F.A.; Galindo, C.; Gonzalez-Jimenez, J. Towards a Semantic Gas Source Localization under Uncertainty. In Information Processing and Management of Uncertainty in Knowledge-Based Systems; Medina, J., Ojeda-Aciego, M., Verdegay, J.L., Perfilieva, I., Bouchon-Meunier, B., Yager, R.R., Eds.; Springer: Cham, Switzerland, 2018; Volume 855, pp. 504–516. [Google Scholar] [CrossRef]
- Gongora, A.; Monroy, J.; Gonzalez-Jimenez, J. An Electronic Architecture for Multi-Purpose Artificial Noses. J. Sens. 2018, 2018. [Google Scholar] [CrossRef]
- Monroy, J.; Gonzalez-Jimenez, J. Gas Classification in Motion: An Experimental Analysis. Sens. Actuators B Chem. 2017, 240, 1205–1215. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Random | Greedy-d | Semantic-p | Semantic-Cost | Semantic-MDP | ||
|---|---|---|---|---|---|---|
| d (m) | ||||||
| n | ||||||
| (s) | ||||||
| d (m) | ||||||
| n | ||||||
| (s) | ||||||
| d (m) | ||||||
| n | ||||||
| (s) | ||||||
| d (m) | ||||||
| n | ||||||
| (s) |
| Category | Smoke_Smell | Gas_Smell | Rotten_Food_Smell |
|---|---|---|---|
| TV monitor | |||
| Food | 0.17 | ||
| Fridge | 0.25 | 0.17 | |
| Oven | 0.25 | 0.5 | 0.17 |
| Bottle | 0.5 | 0.17 | |
| Microwave | 0.25 | 0.17 | |
| Cup | 0.17 | ||
| Toaster | 0.25 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monroy, J.; Ruiz-Sarmiento, J.-R.; Moreno, F.-A.; Melendez-Fernandez, F.; Galindo, C.; Gonzalez-Jimenez, J. A Semantic-Based Gas Source Localization with a Mobile Robot Combining Vision and Chemical Sensing. Sensors 2018, 18, 4174. https://doi.org/10.3390/s18124174
Monroy J, Ruiz-Sarmiento J-R, Moreno F-A, Melendez-Fernandez F, Galindo C, Gonzalez-Jimenez J. A Semantic-Based Gas Source Localization with a Mobile Robot Combining Vision and Chemical Sensing. Sensors. 2018; 18(12):4174. https://doi.org/10.3390/s18124174
Chicago/Turabian StyleMonroy, Javier, Jose-Raul Ruiz-Sarmiento, Francisco-Angel Moreno, Francisco Melendez-Fernandez, Cipriano Galindo, and Javier Gonzalez-Jimenez. 2018. "A Semantic-Based Gas Source Localization with a Mobile Robot Combining Vision and Chemical Sensing" Sensors 18, no. 12: 4174. https://doi.org/10.3390/s18124174
APA StyleMonroy, J., Ruiz-Sarmiento, J.-R., Moreno, F.-A., Melendez-Fernandez, F., Galindo, C., & Gonzalez-Jimenez, J. (2018). A Semantic-Based Gas Source Localization with a Mobile Robot Combining Vision and Chemical Sensing. Sensors, 18(12), 4174. https://doi.org/10.3390/s18124174