5.1. Simulation Test
The proposed algorithm was simulated under the GPS/INS loosely coupled mode. The biases caused by drift and the random walk noise of the accelerometer were set as
and
, respectively. The biases and random walk noise of the gyroscope were set as
and
, respectively. The initial misalignment angle was set as
for heading, pitching, and roll. The GPS speed and position errors were set as 1 m and
, respectively. The out frequency of the inertial sensors and GPS receiver were set as 100 Hz and 1 Hz, respectively. The vehicle movement start position was set to latitude
and longitude
. The process of the vehicle’s motion is listed in
Table 3.
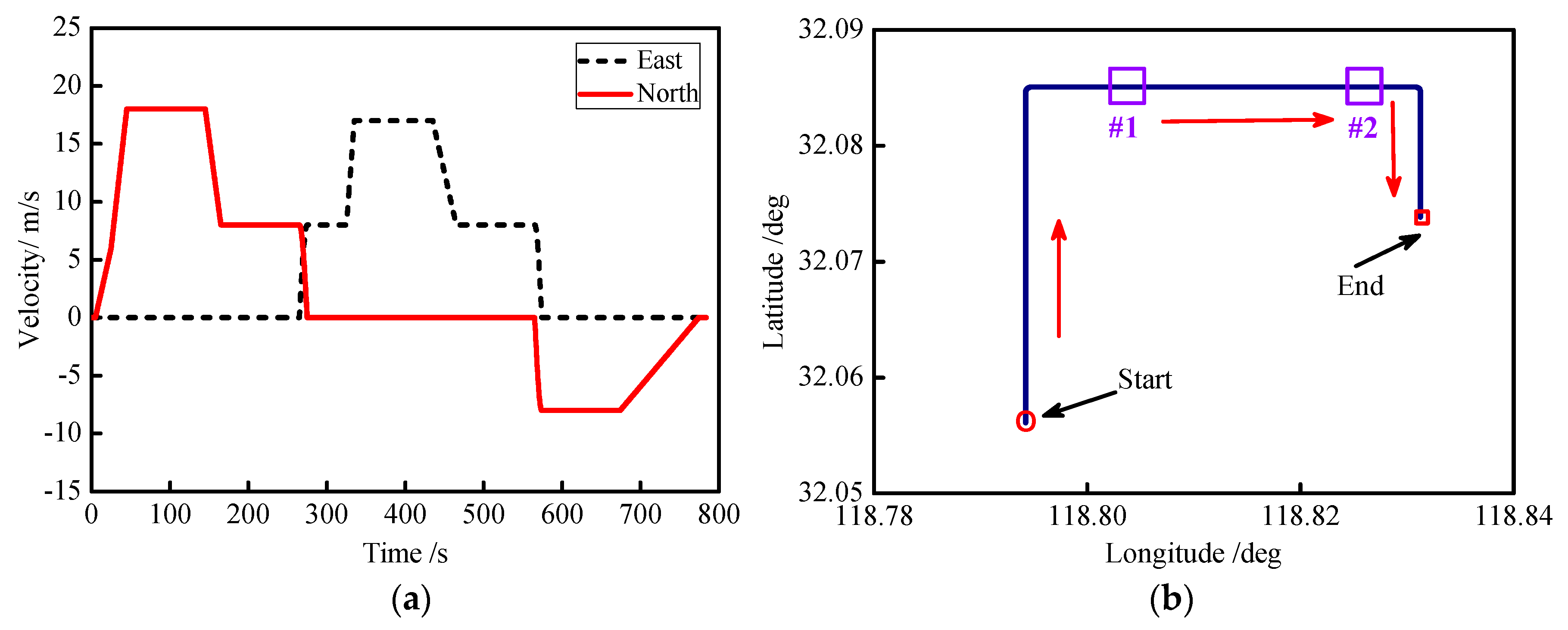
The moving speeds of the vehicle and trajectories are shown in
Figure 6a,b; the velocities of the vehicle in the east and north directions were less than
, respectively. The whole trajectory had two turns representing rotating speeds of 9°/s and 10°/s, respectively. In order to verify the performance of GPS/INS integrated positioning when GPS was out of lock, two simulated GPS outages are marked by purple lines in
Figure 6b, which represent GPS outages times of 50 s (350~400 s) and 100 s (450~550 s).
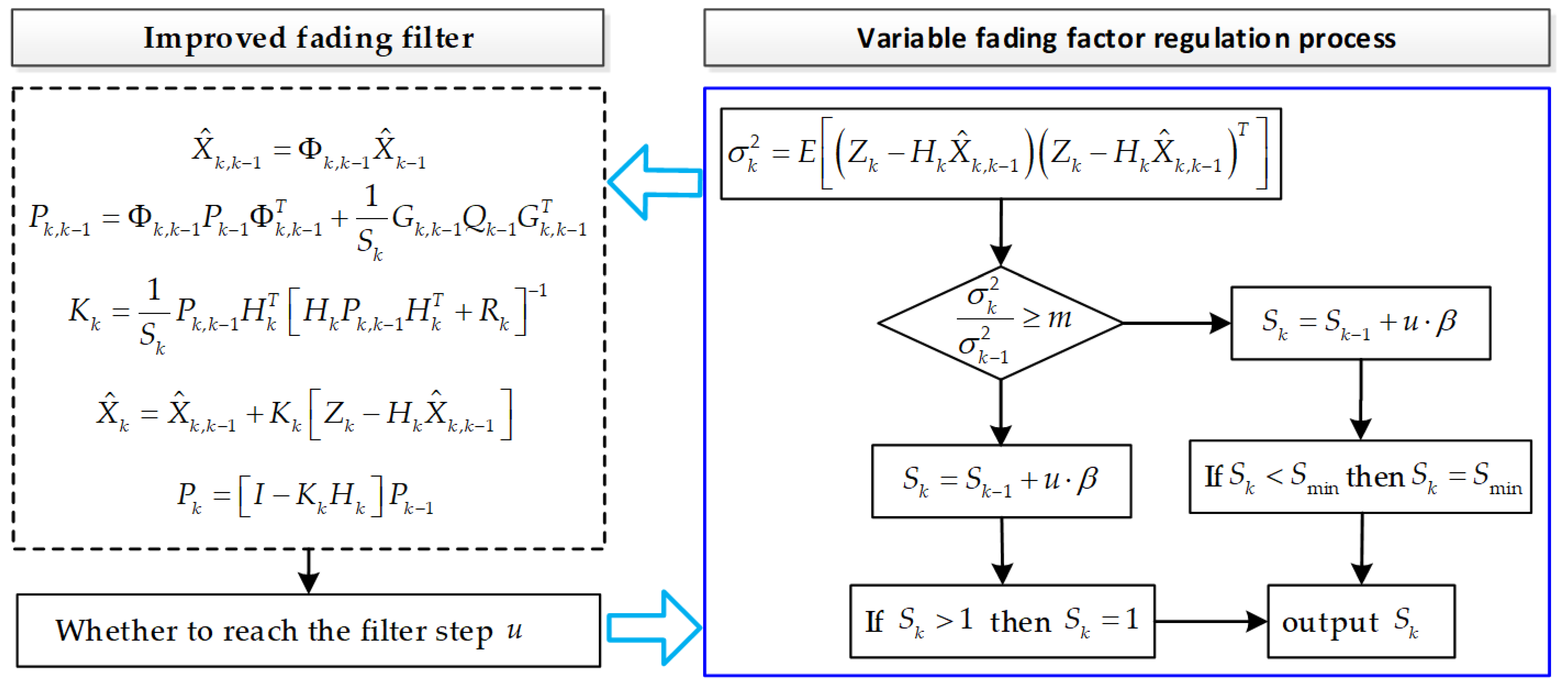
First, the IFF algorithm proposed in this paper was verified. In the IFF algorithm, the select step size was set as
, error variance ratio threshold was
, and the minimum value of fading factor was
. In the conventional fading filter (FF), the fading factor was selected to be
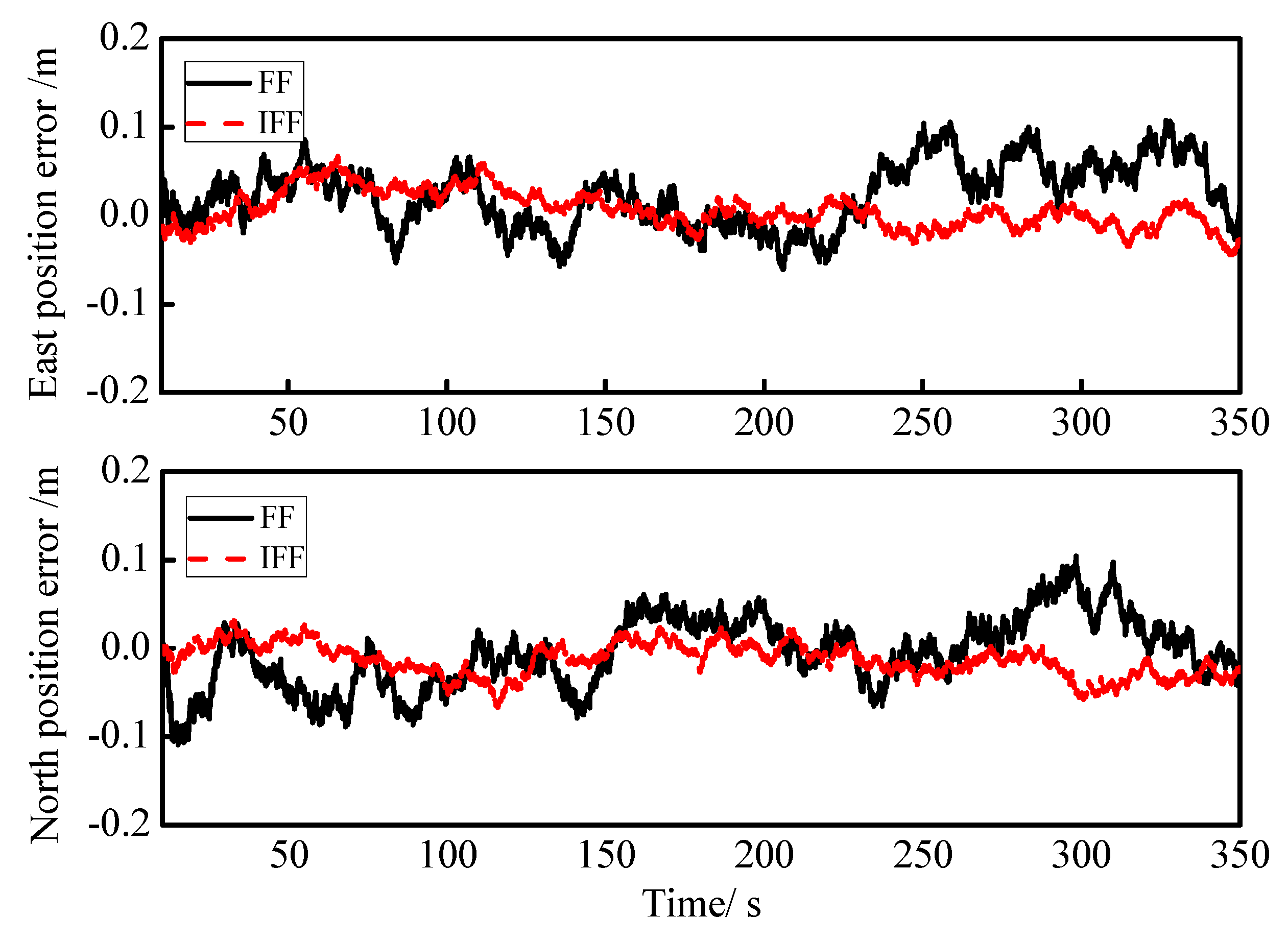
. The curves of the east and north position errors for the fading filter (FF) and IFF algorithms are shown in
Figure 7, in which the FF and IFF are marked by black and red lines, respectively, and the simulation time is 0s to 350s. In
Figure 7, we can intuitively see that the red line is less volatile than the black line, so the IFF performed better than the FF. To compare the performance of each algorithm in a clearer way, the root-mean-square errors (RMSEs) of the east and north positions for each algorithm were calculated, and they are listed in
Table 4, showing that the RMSE position of the IFF algorithm was about half the RMSE position of the FF algorithm.
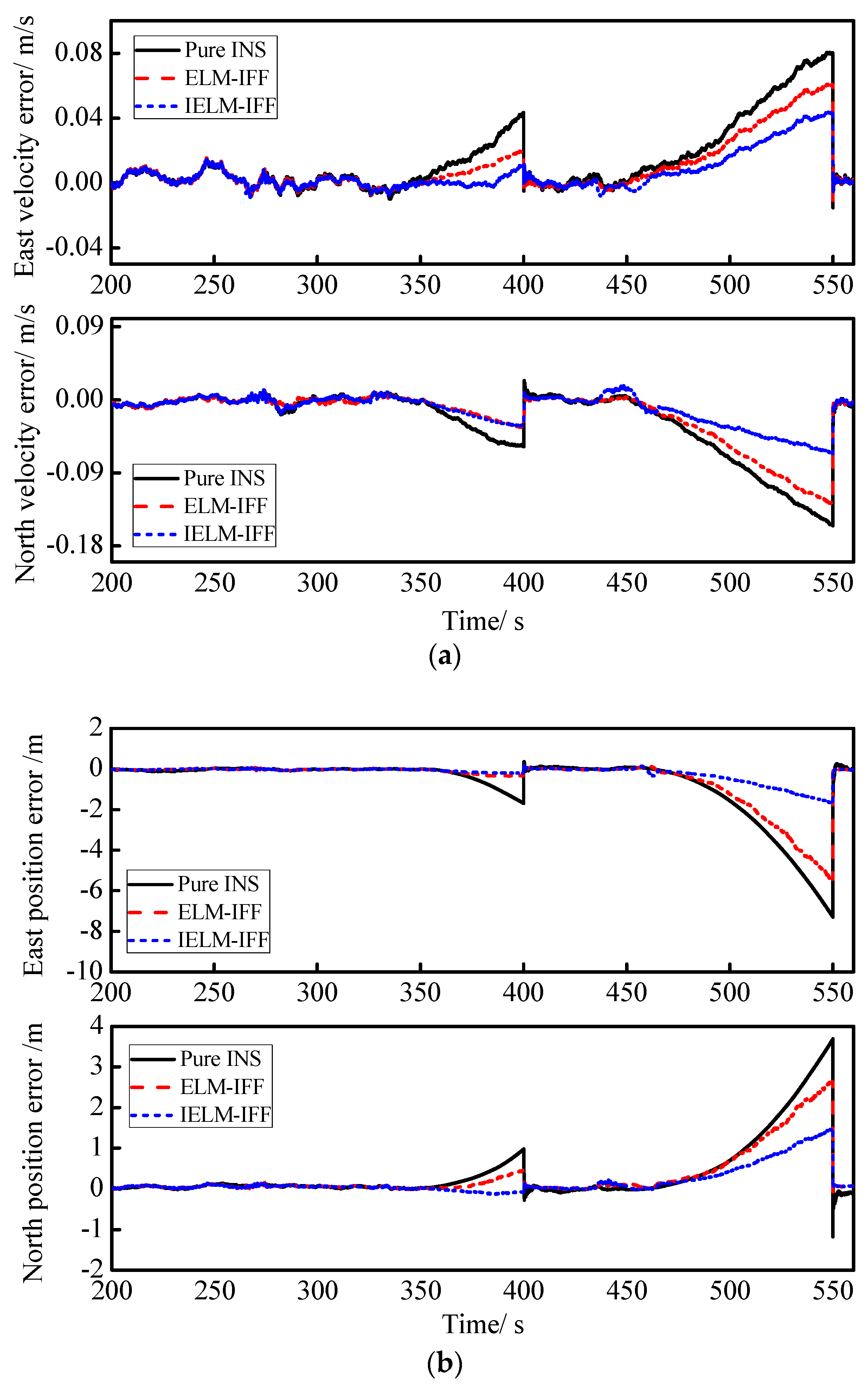
In order to verify the validity of the IELM+IFF algorithm proposed in this paper during GPS outages, two GPS outages were simulated for (#1) 350s~400 s and (#2) 450s~550 s.
Figure 8a shows the east and north velocity errors for pure INS, ELM-IFF, and IELM-IFF. Meanwhile,
Figure 8b displays the east and north position errors for pure INS, ELM+IFF, and IELM-IFF.
Figure 8a,b clearly demonstrate that when the IFF algorithm is used at the same time, the improved ELM algorithm for the suppression of speed errors and position errors is obviously superior to the traditional ELM algorithm during GPS outages.
The RMSEs of the velocities and positions from the pure INS, ELM-IFF, and IELM-IFF with the first and second GPS outages periods are listed in
Table 5. The result show that the proposed IELM-IFF algorithm was more effective than ELM-IFF as it decreased the RMSEs of the east and north velocities by about 38% and 60%, while the RMSEs of the east and north positions decreased by about 45% and 43%, respectively.
5.2. Real Road Test
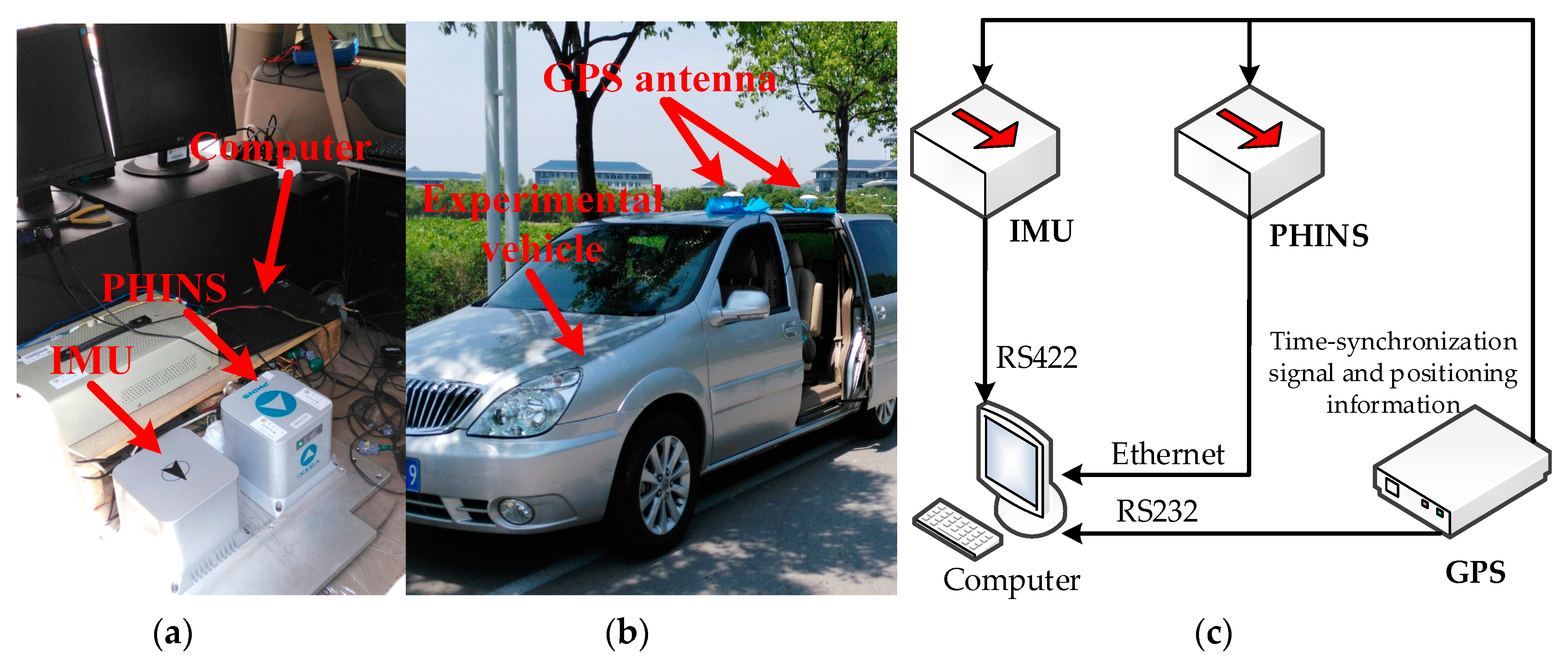
To evaluate the performance of the proposed algorithm compared to the conventional counterparts in practical applications, a real road test was designed and is detailed in this subsection. The vehicle test equipment included an inertial measurement unit (IMU), a GPS receiver, PHINS, and a computer. The IMU consisted of three fiber optic gyroscopes and three accelerometers; the GPS receiver used the FlexPark6 GPS receiver, PHINS; from the French IXBLUE Inertial Navigation system; and the computer used was PC104. PHINS was used to provide accurate navigation reference information. The detailed performance parameters of IMU and GPS receiver are shown in
Table 6, and the PHINS specifications are listed in
Table 7.
As
Figure 9a shows, the PHINS and IMU were installed together,
Figure 9b shows the experimental vehicle, and
Figure 9c shows the structure of the vehicle test equipment. We can see from
Figure 9b that the outputs of GPS provided the time-synchronization signal for PHINS and IMU. The raw data of the outputs of the IMU were transferred via an RS422 port, and the PHINS data were collected via Ethernet from the computer. The GPS data was acquired through an RS232 communication interface. At the same time, a real-time operation system, VxWorks, was embedded in the computer.
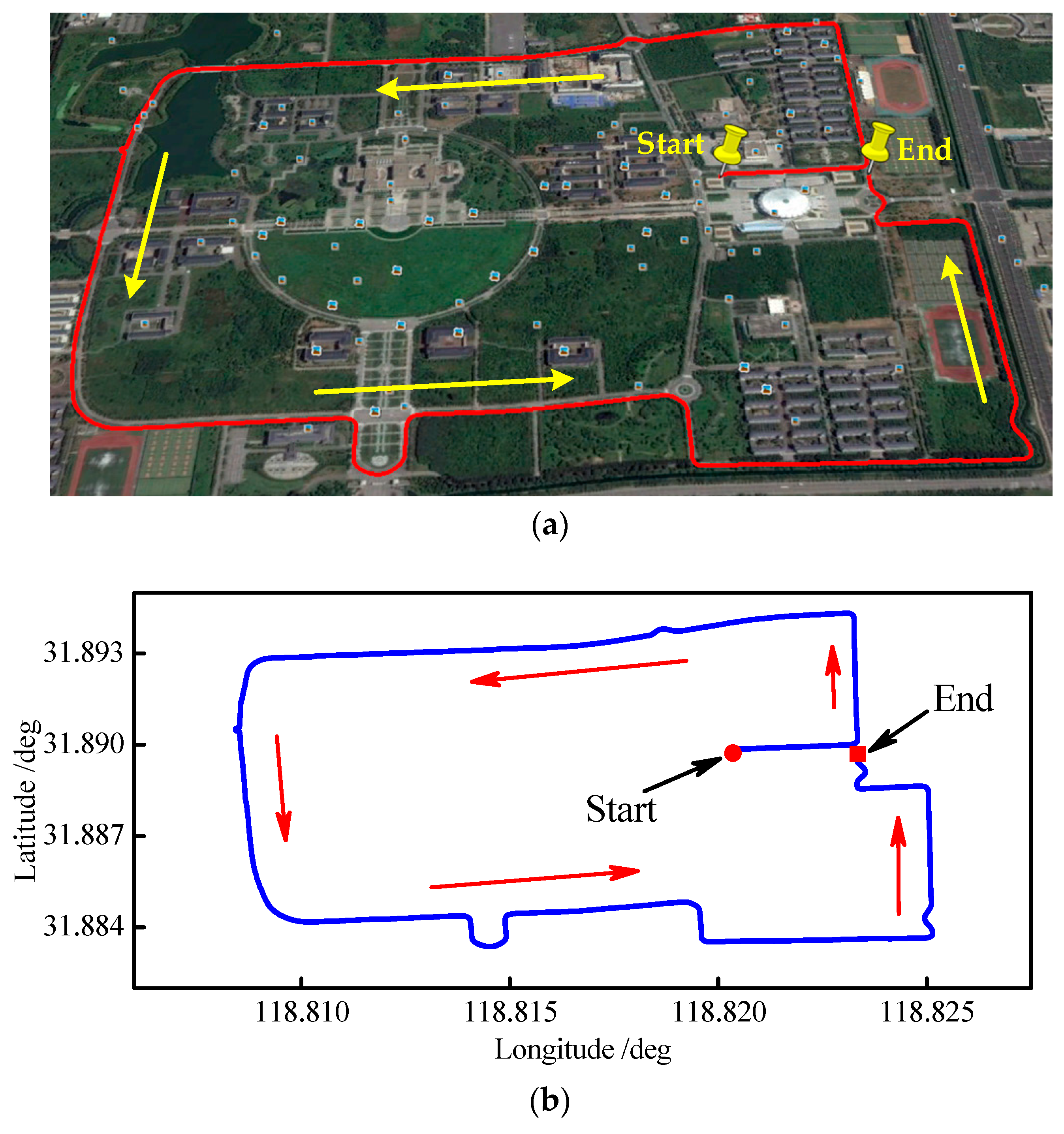
Figure 10 shows the vehicle trajectory, which was tested at the Jiulonghu campus of Southeast University in Nanjing.
Figure 10a shows the Google map of the reference trajectory. Meanwhile,
Figure 10b shows the coordinates of the reference trajectory.
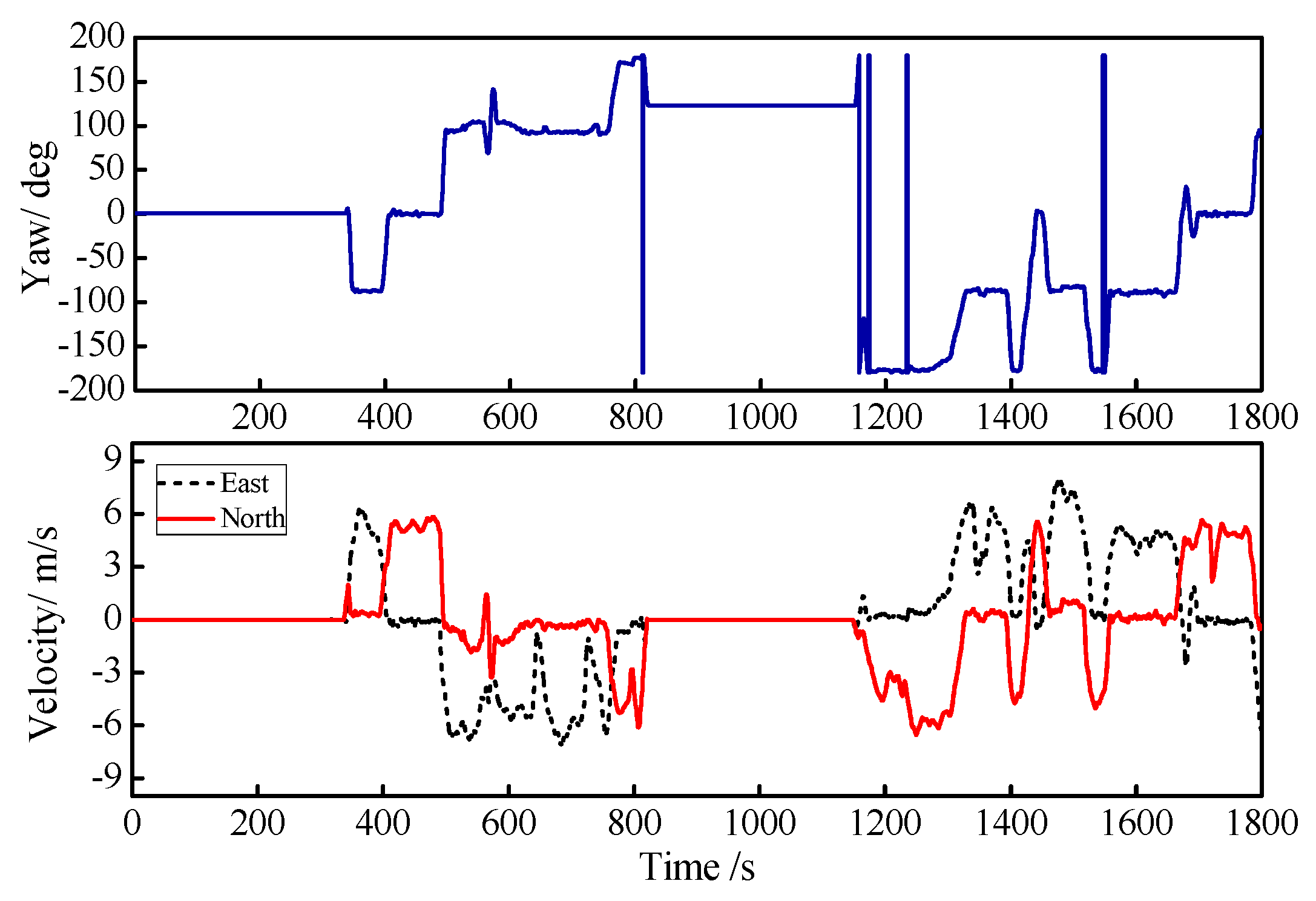
The initial alignment time of the system was 0~300 s; after 300s, the whole system worked under the GPS/INS loosely coupled mode. The entire testing process took 1850 s and the GPS signal was good under the test environment. The yaw angle, east velocity, and north velocity information for the entire exercise are shown in
Figure 11, where the yaw angle is depicted by the blue line, and the east velocity and the north velocity are described by the black and red lines, respectively.
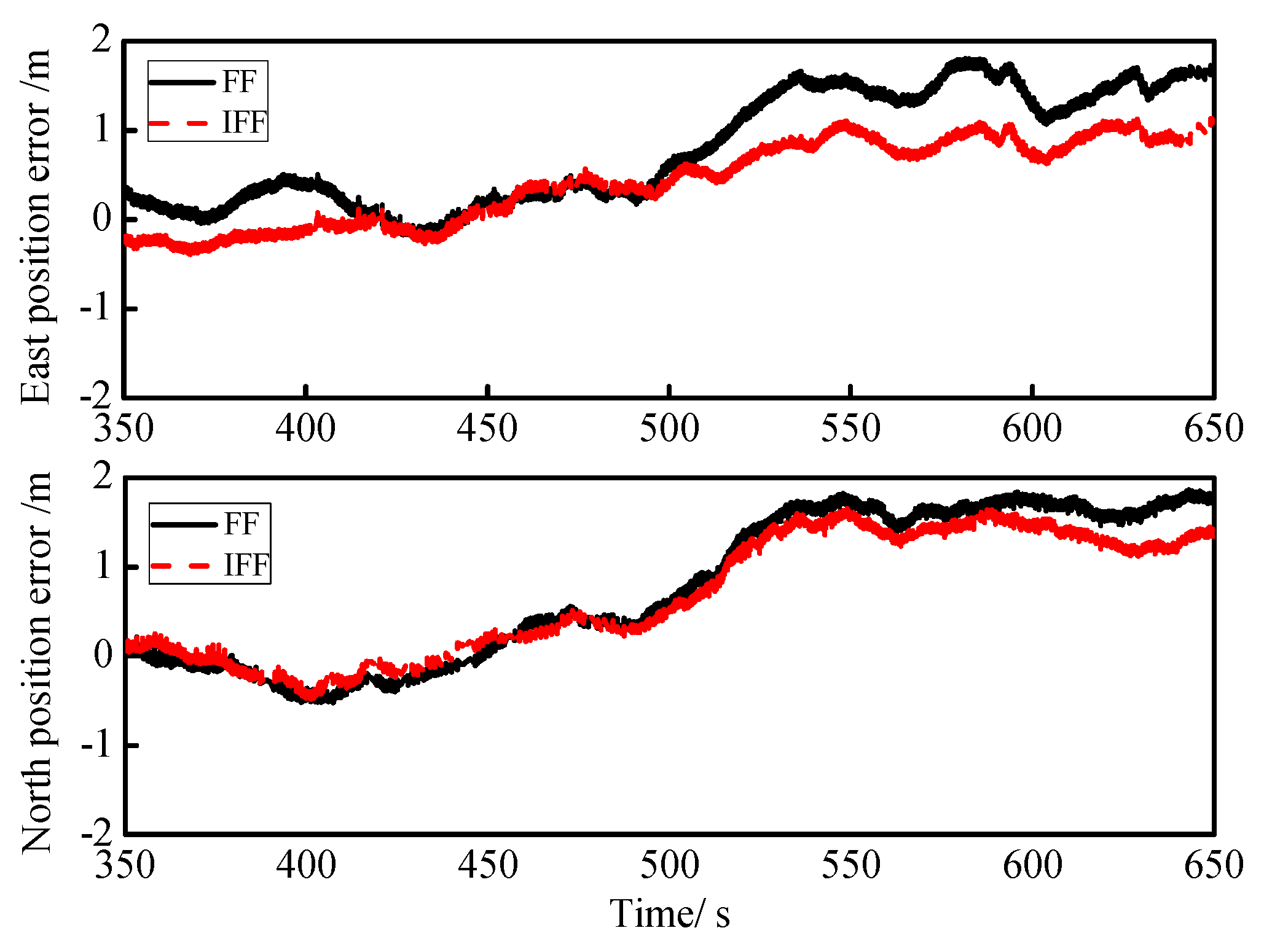
The proposed algorithm was verified by the data collected in the above real road test. First, the IFF algorithm and FF algorithm were verified by the east position error and the north position error of GPS/INS integrated navigation from 350 s to 650 s, which is shown in
Figure 12. In the IFF algorithm, the step size was
, the error variance ratio threshold was
, and the minimum value of the fading factor was
, while in FF, the fading factor was
. In order to more accurately illustrate the superiority of the IFF algorithm, the RMSEs of the east and north positions were obtained by calculating the root-mean-square error of the error data in
Figure 12, which are listed in
Table 8. Compared with the FF algorithm, the RMSEs of the east position and north position of the IFF algorithm (0.6319 and 0.9639) reduced by about 38% and 15%, respectively.
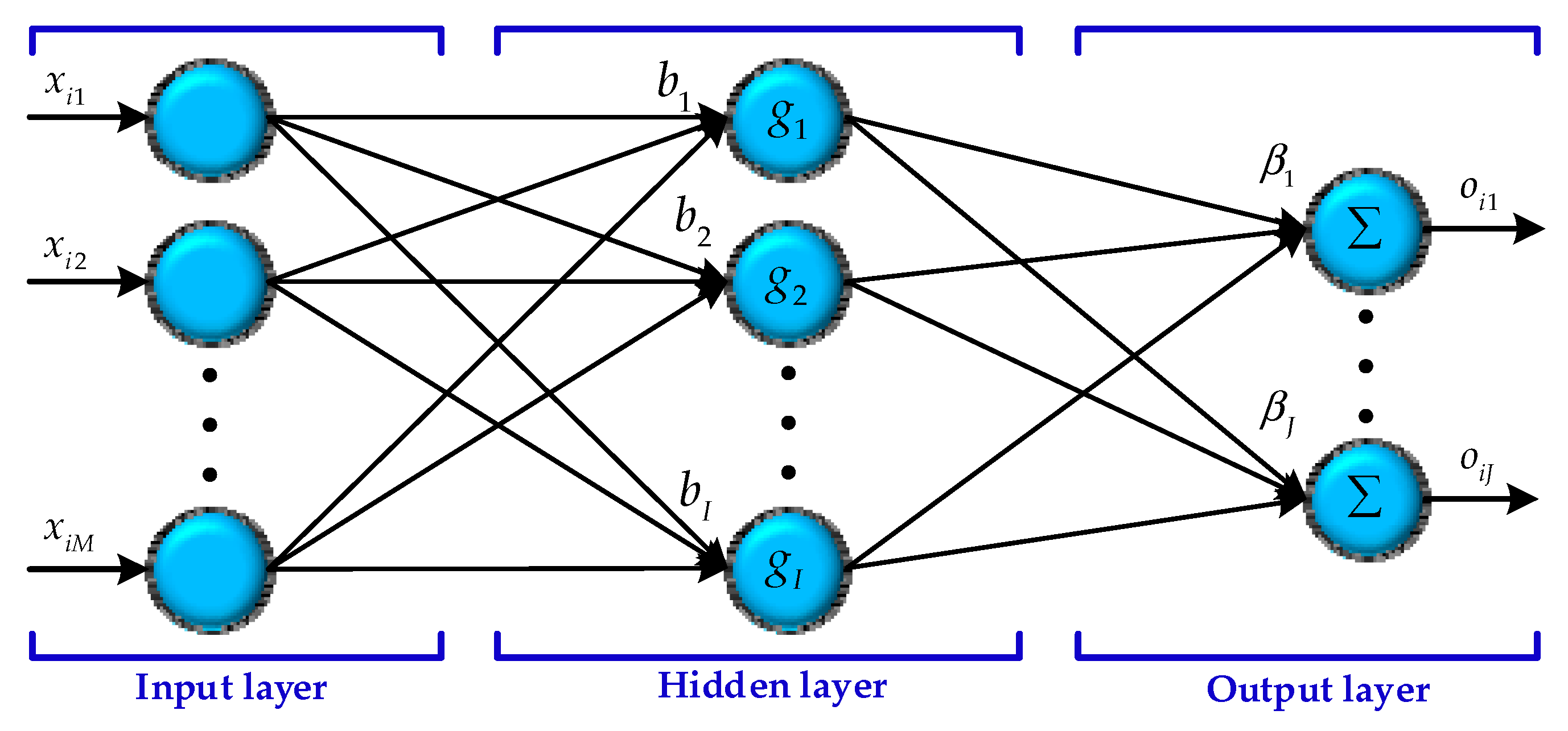
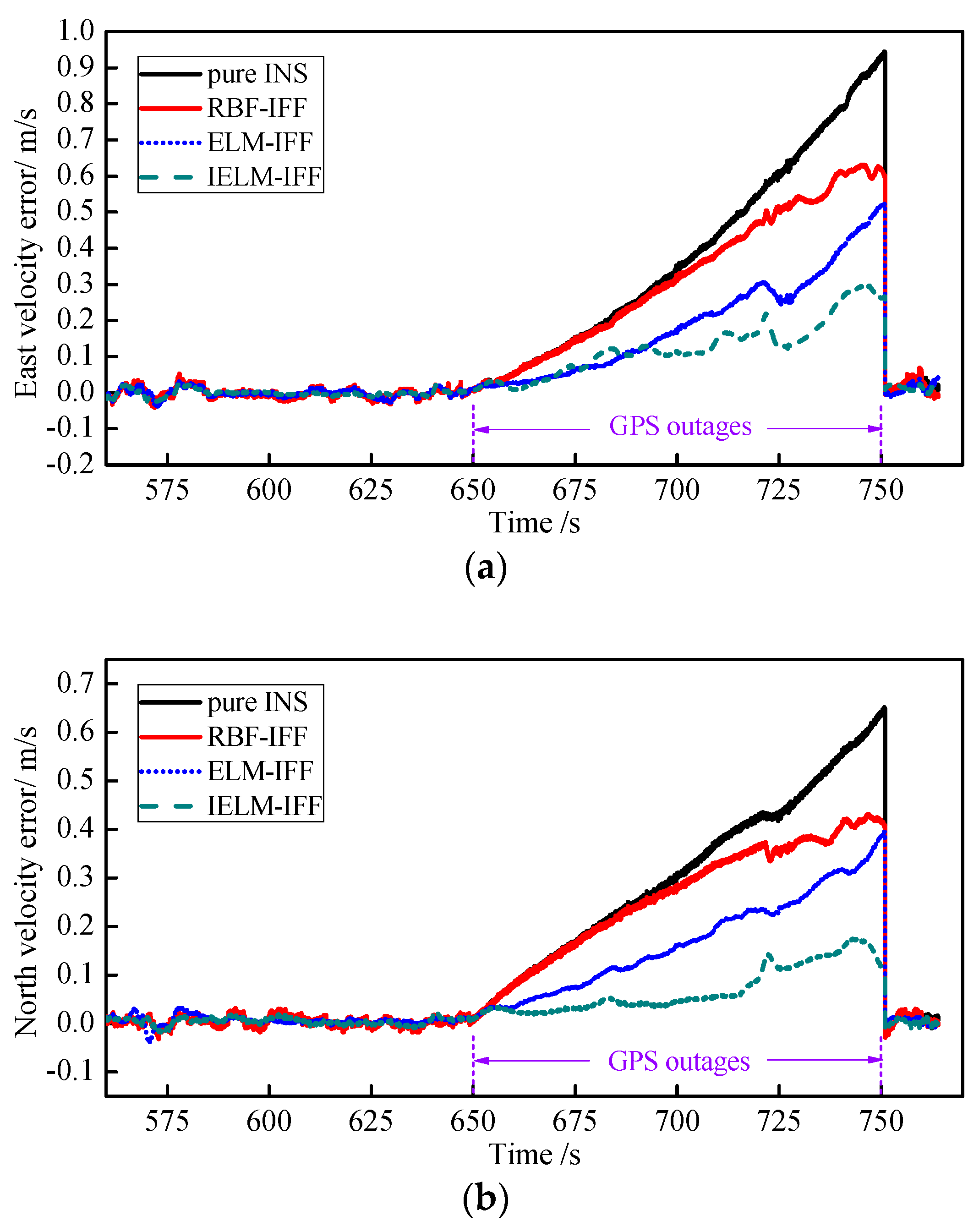
Second, to validate the performance of the IELM algorithm, the results were compared with the ELM and RBF neural network algorithms. The number of hidden layer nodes in the IELM, ELM, and RBF neural network was all 20. The training time was 300 s to 650 s, and the simulation set the GPS outage time from 650 to 750 s. The east velocity error and north velocity error for the pure INS, RBF-IFF, ELM-IFF, and IELM-IFF of GPS outages are shown in
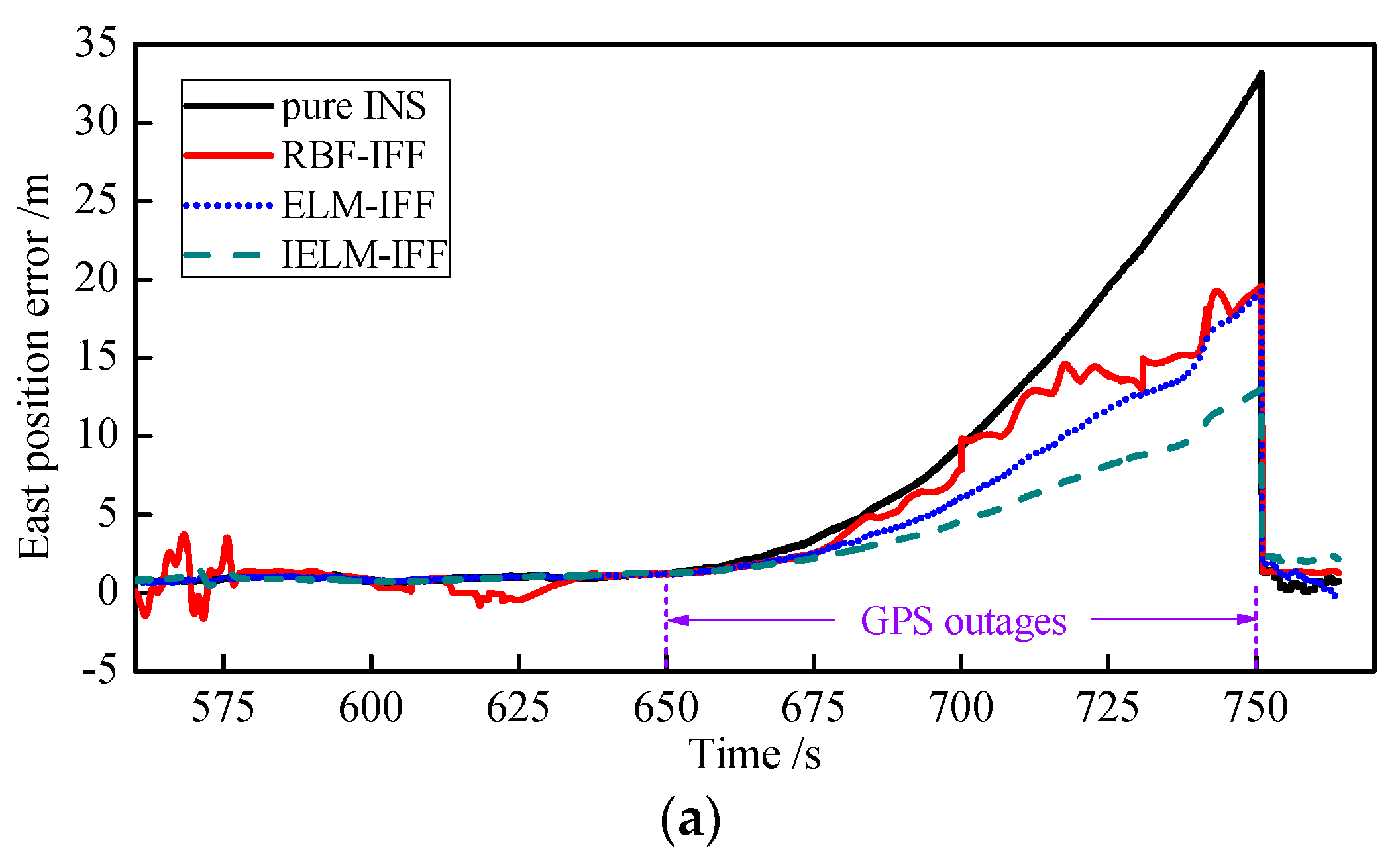
Figure 13a,b. The error gradually increased from 650 s to 750 s in the order of pure INS, RBF-IFF, ELM-IFF, and then IELM-IFF during the GPS outages. The east position error and north position error for the pure INS, RBF-IFF, ELM-IFF, and IELM-IFF during the GPS outages are shown in
Figure 14a,b. Compared with other algorithms, the IELM-IFF algorithm had the smallest position error when the GPS signal lost lock. To compare the performance of each algorithm in a clearer way, the root-mean-square error and maximum error of the velocity and position information for each algorithm during the GPS outages are listed in
Table 9. The maximum errors and RMSEs of the velocity and position for IELM-IFF were the smallest compared with the other algorithms.
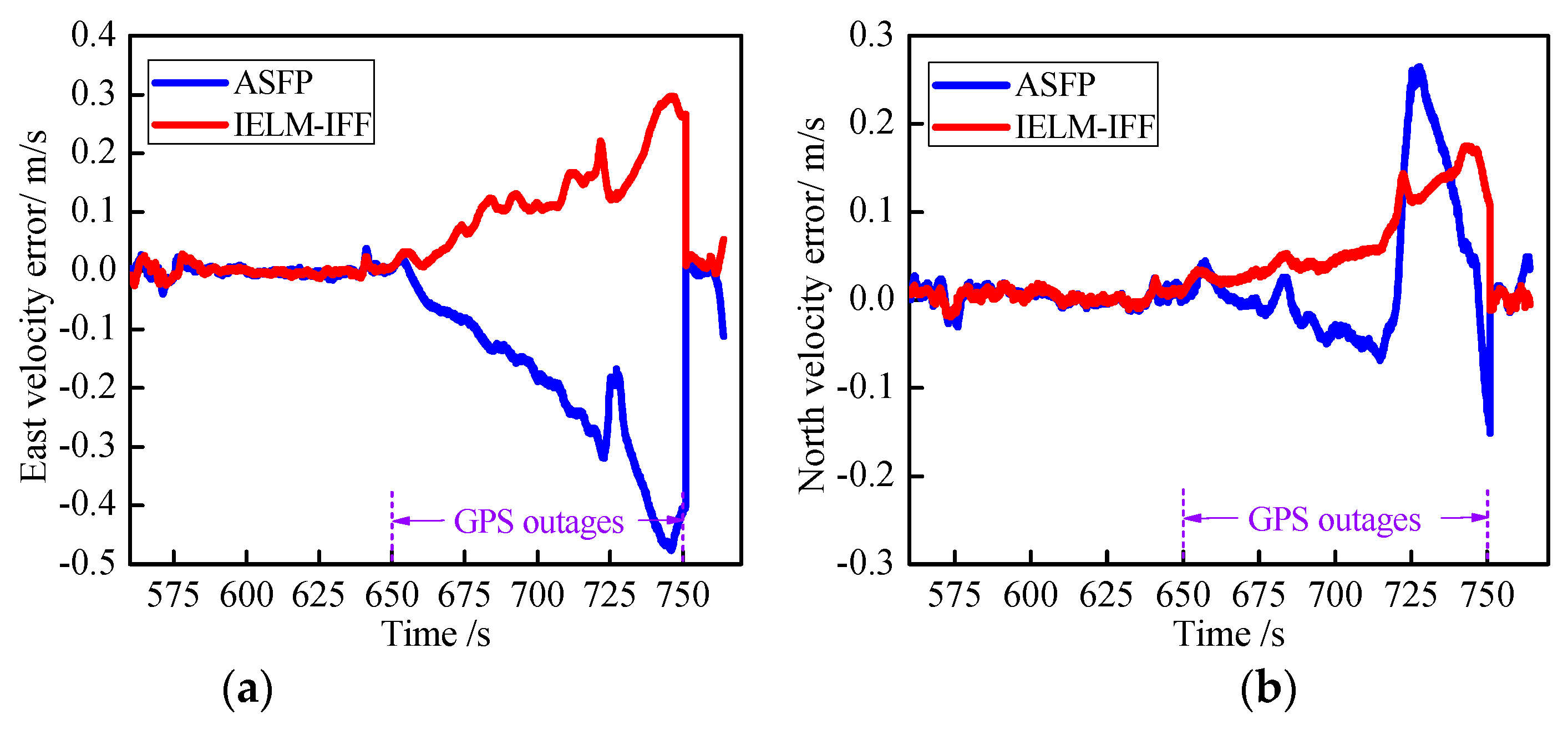
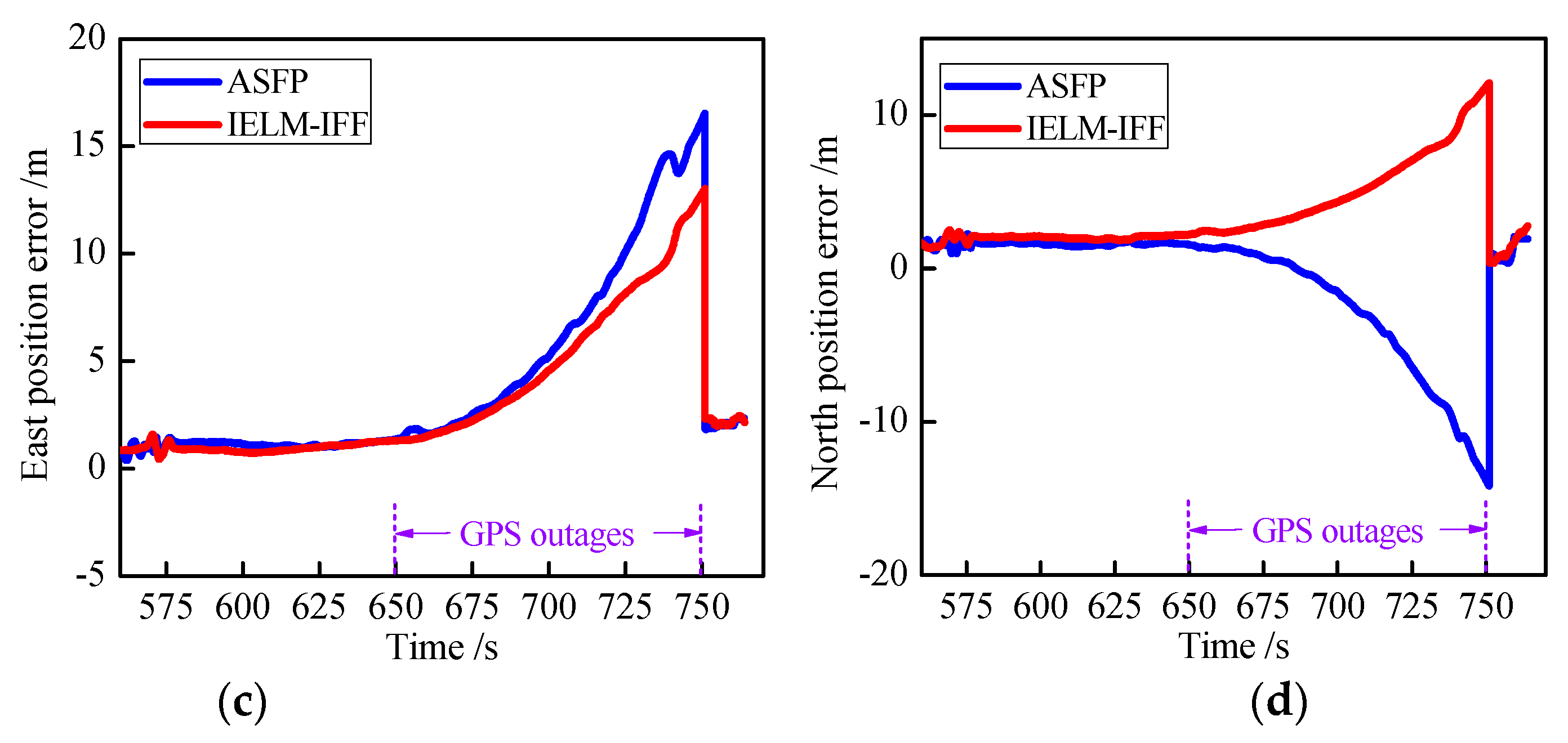
Another existing algorithm was compared to demonstrate the effectiveness of the proposed approach. The artificial-intelligence-based segmented forward predictor (ASFP) was developed in reference [
31] and uses two RBFNNs and a forward prediction algorithm. The ASFP algorithm was compared with the proposed IELM-IFF algorithm.
Figure 15 presents the results during GPS outages from 650 to 750 s, where
Figure 15a,b show the east and north velocity errors, respectively, and
Figure 15c,d show the east and north position errors, respectively. The maximum errors of the east and north positions were 13.0378 and 12.0901 for the IELM-IFF algorithm. However, the maximum position errors for the ASFP algorithm were 16.5424 and –14.1796. So, the proposed IELM-IFF showed better precision than the ASFP algorithm, and the east and north position errors reduced by 21.18% and 14.73%, respectively.
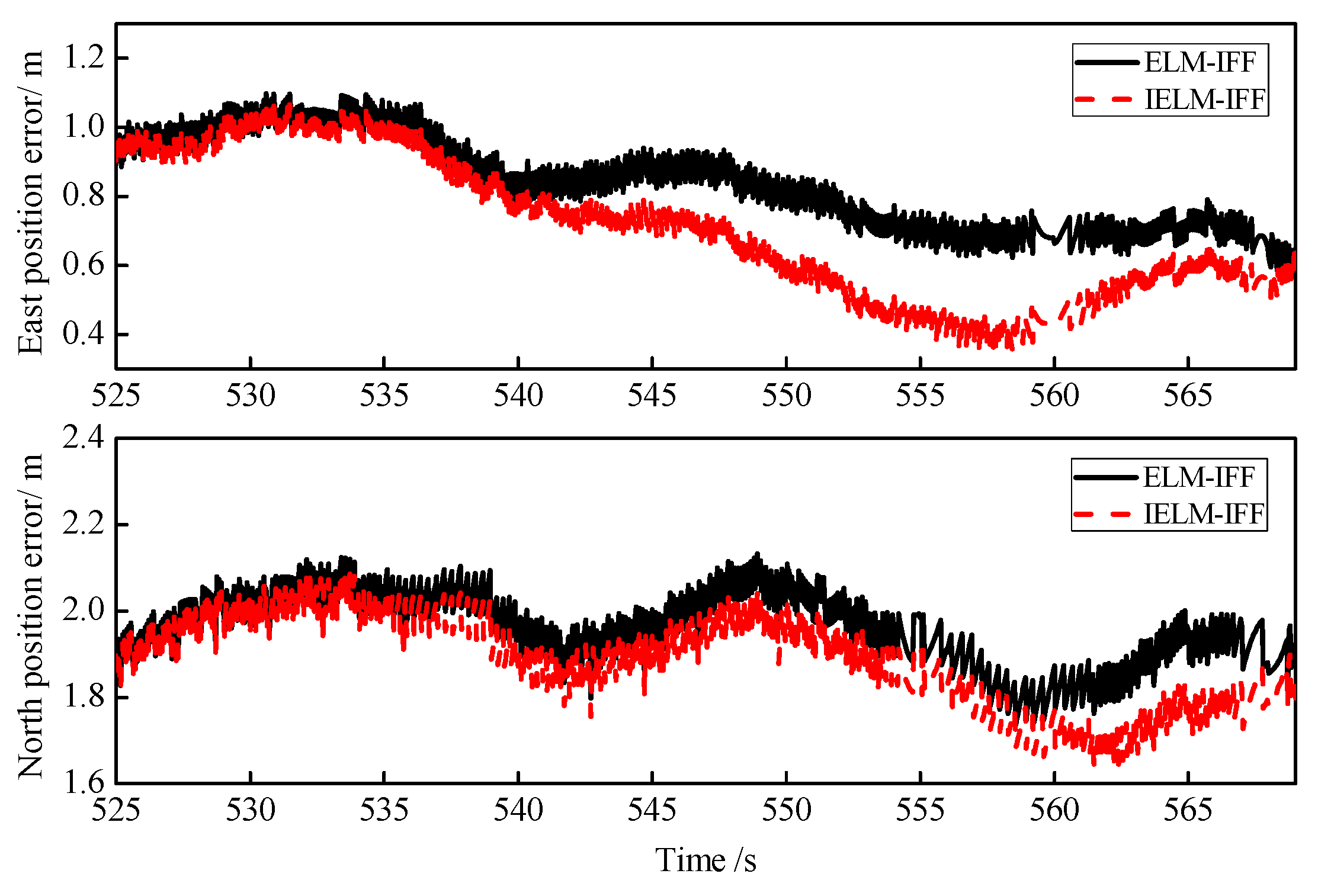
Third,
Figure 16 shows the position prediction errors for ELM-IFF and IELM-IFF in the case of good GPS signal with training times from 300 to 525 s and a forecast period of 525 to 570 s. In addition, the RMSEs of the position for these two algorithms under good GPS signal are listed in
Table 10. The RMSEs of the east position and north position predictions were 0.7346 and 1.8919, which is better than the results for the ELM-IFF algorithm.
Fourth, to evaluate the performance of the proposed model, the
model was utilized as a comparison [
32].
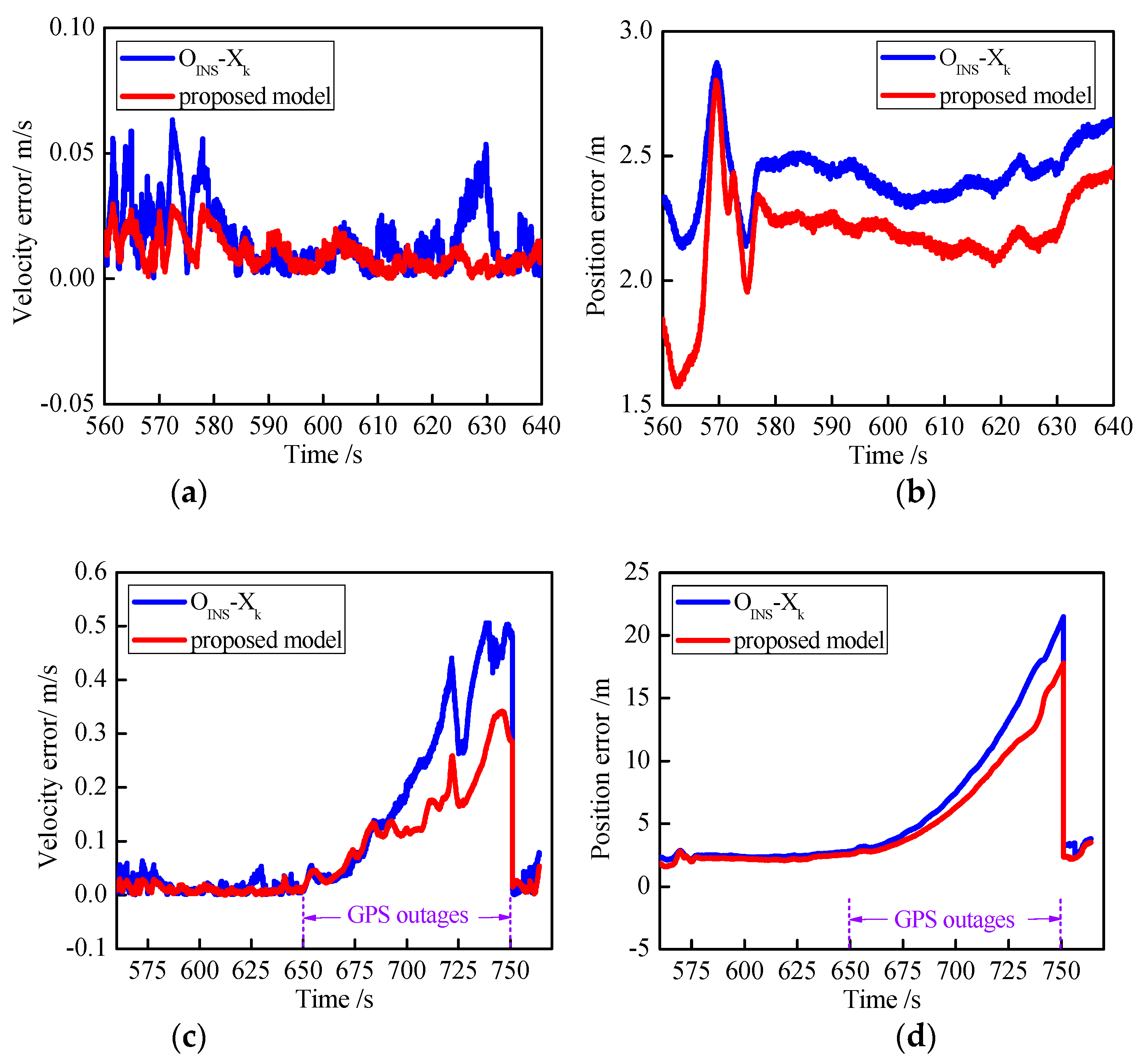
Figure 17 displays the horizontal velocity error and the horizontal position error, where
Figure 17a,b represent good GPS signals, and
Figure 17c,d represent GPS outages from 650 to 750 s. When the GPS signal was good, the proposed model showed better accuracy than the
model in most cases. When the GPS signal was unavailable for 650 to 750 s, the two models showed different results. It is obvious that the proposed model outperformed the
model. During the GPS outages for a period of 650 to 680 s, the velocity errors of the
model and proposed model were similar. This means that during short GPS outages, both models could be employed to reduce the velocity error. However, when the GPS outage becomes longer, the proposed model achieves higher accuracy than the
model.
The reason why the proposed model performs better than the model is that the predicted pseudo GPS position only relates to the output of INS, while the predicted state vector is influenced by both the INS information and the accuracy of the loosely-coupled KF. When the last estimation of the KF is correct, the can be well utilized. However, the GPS/INS integrated system cannot ensure absolute accuracy, which means there are always small errors in the estimation of the KF.
Fifth, in order to compare the computational costs between different algorithms, RBF, ELM-IFF, ASFP, and IELM-IFF with the same number of nodes were investigated. To facilitate the observation of the computational cost, the number of pieces of training sample data was set as 100. The average time consumption of training procedures for each algorithm in the simulation is listed in
Table 11, showing that the ELM-IFF, ASFP, and IELM-IFF performed faster than RBF. The computational cost of the proposed IELM-IFF algorithm was 4.71ms, which is almost similar to the ELM-IFF algorithm. So, the IELM-IFF algorithm performed better than ELM-IFF and, at the same time, it did not increase the computational cost. In addition, the IELM-IFF method was shown to have a lower computational coast than the ASFP algorithm proposed in reference [
31].
Finally,
Figure 18 shows the curves of convergence performance for the ELM and IELM algorithms, in which the ordinate represents the RMSE values during training, and the abscissa indicates the training times. It can be seen from
Figure 16 that the IELM algorithm achieved higher convergence accuracy than the ELM algorithm for the same training time.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}