A Reliability Scheduling Algorithm for the Static Segment of FlexRay on Vehicle Networks †

Abstract
:1. Introduction
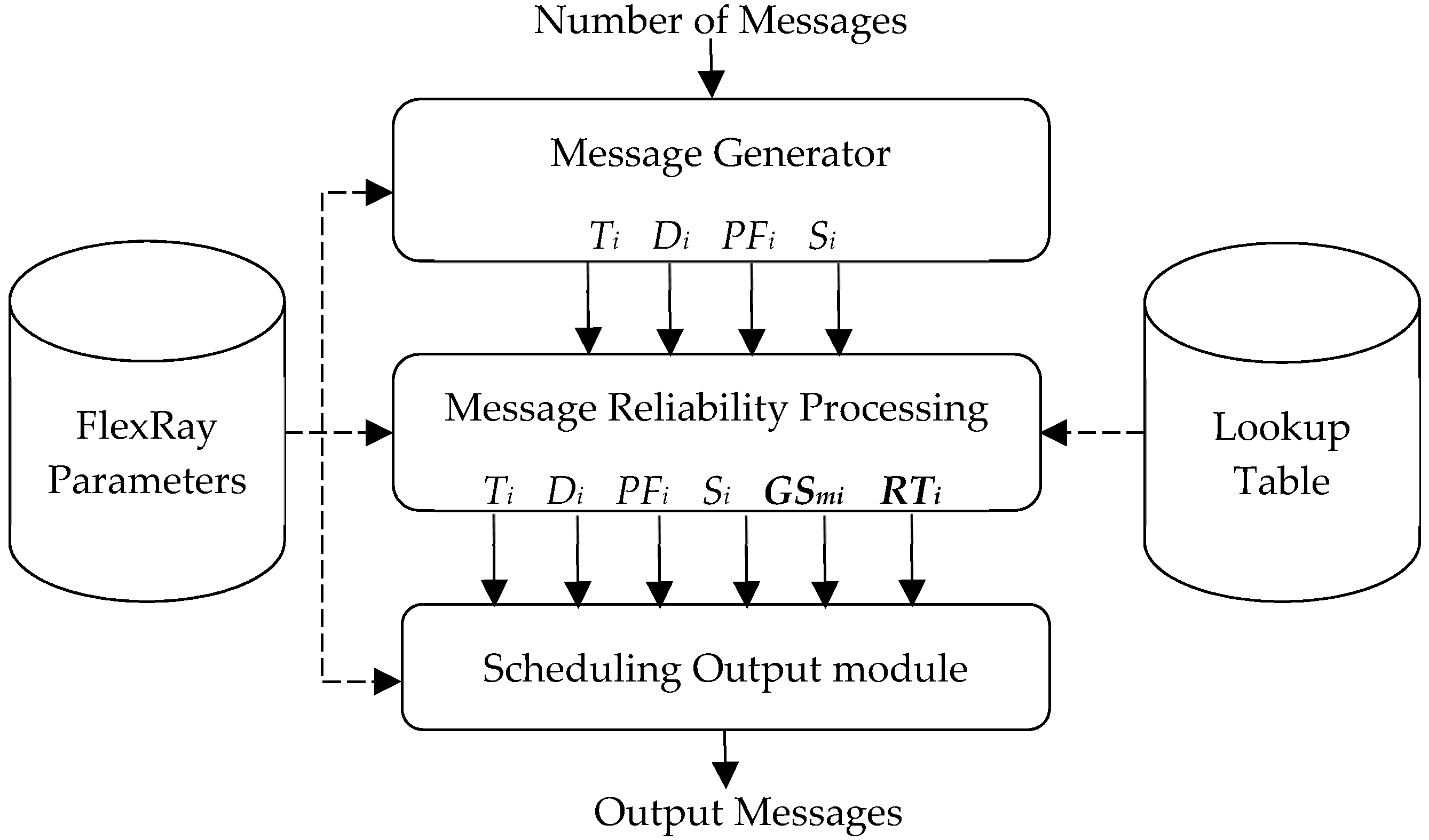
2. Proposed Methodology
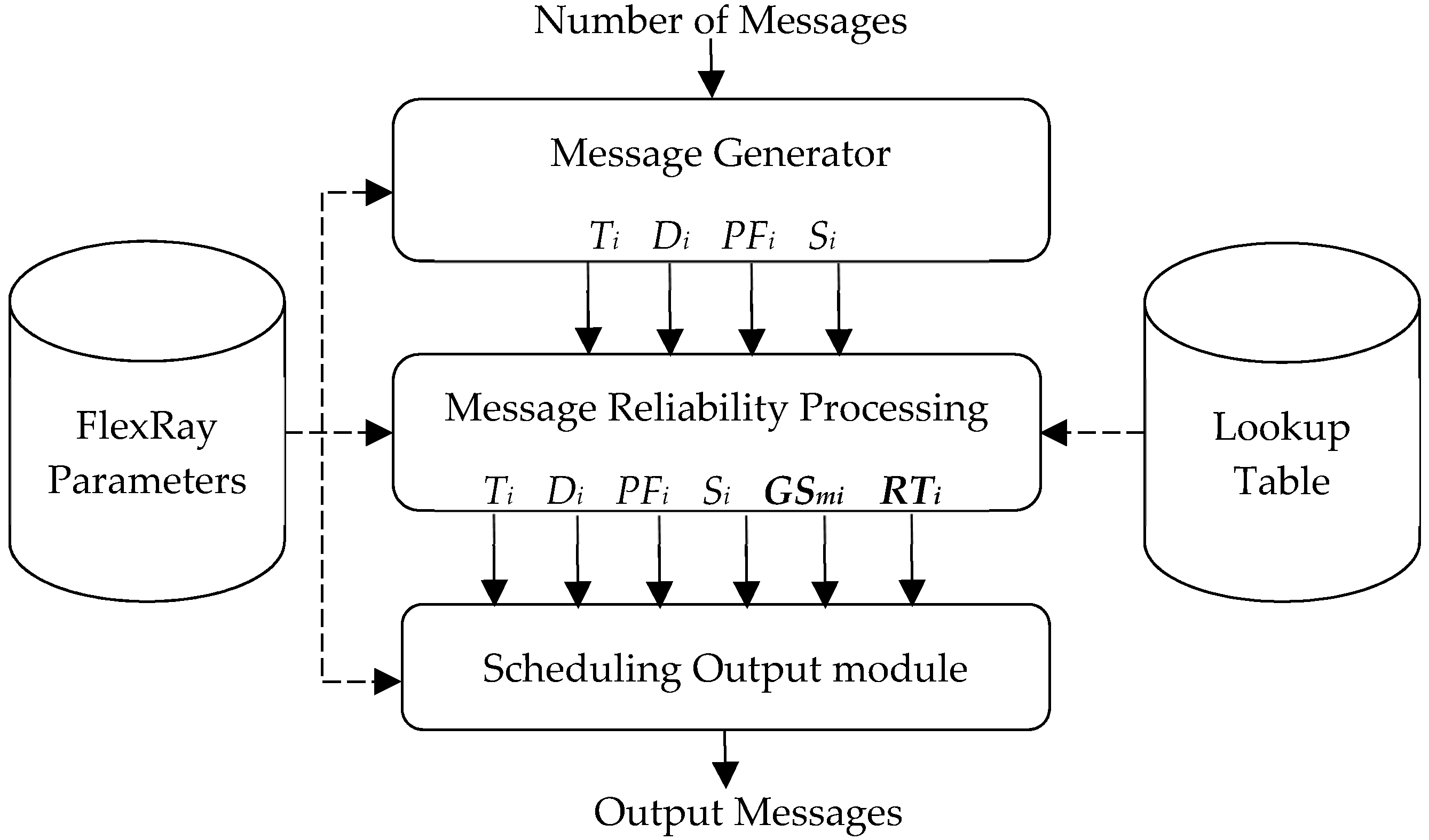
2.1. System Architecture and Design
2.2. Message Generator
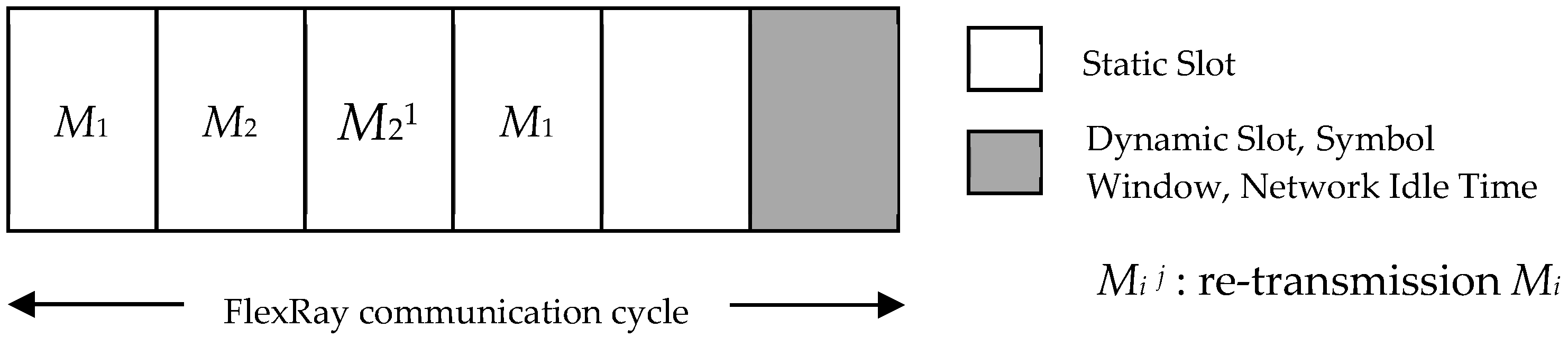
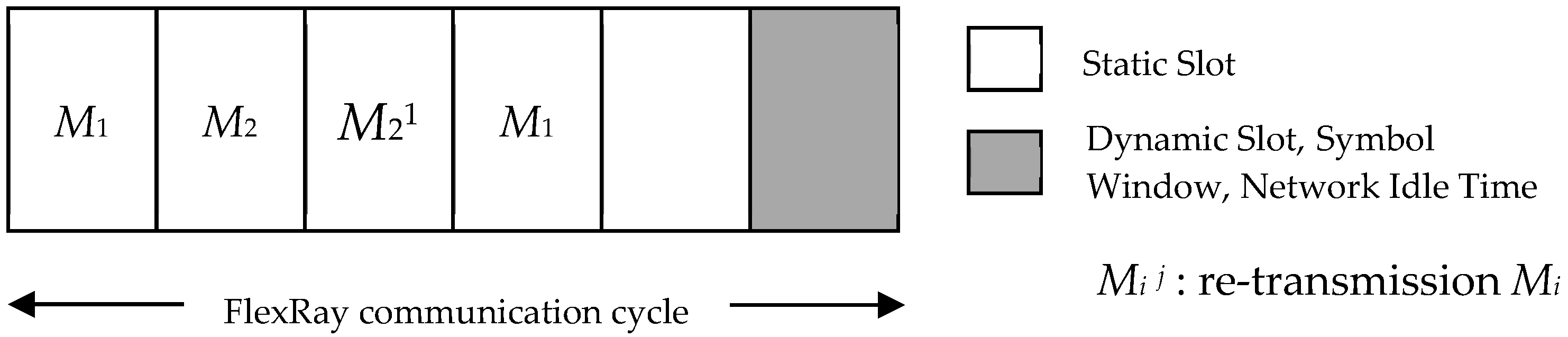
2.3. FlexRay Parameters
- Length of FlexRay communication cycle (LFC): the length of one communication cycle in FlexRay;
- Length of static segment (LST): the static segment length of a FlexRay communication cycle;
- Number of static slots (Nslot): total number of slots in the static segment, within the range 1–1023;
- Length of static slot (Lslot): the length of a slot in the static segment, Lslot = LST/Nslot;
- Testing time (τ): the time required to test fault tolerance in the system. τ is typically one hour (3,600,000 ms);
- System reliability goal (SR): reliability goal for the system. The reliability goal for a communication system (SR) means that the reliability of the system is necessary for transmitting a message.
2.4. Message Reliability Processing Module
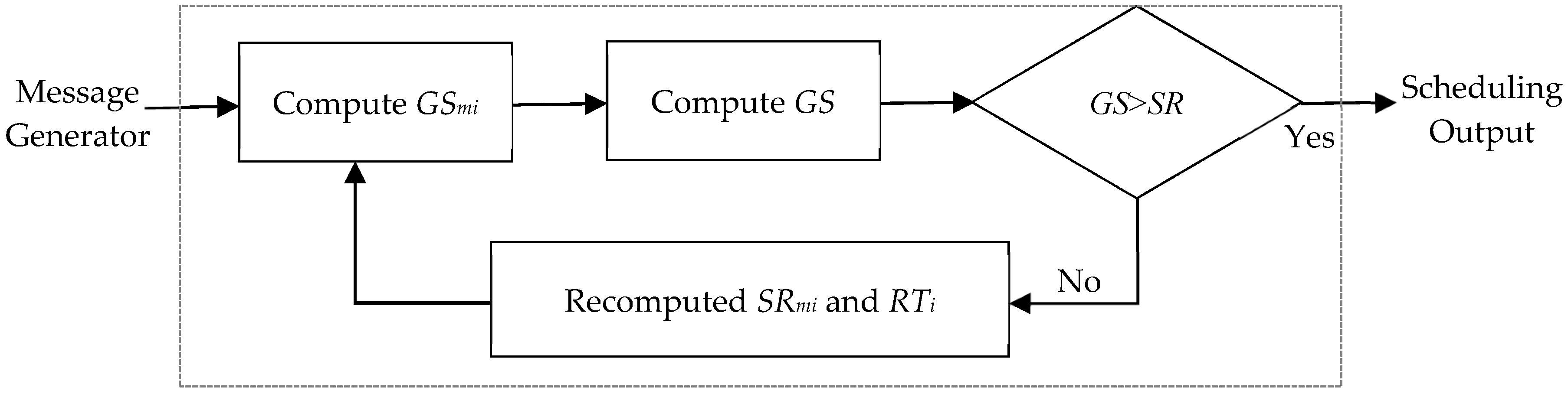
- GSmi: This estimates the probability of success (reliability) for a message (Mi) in transmission, as in Equation (5), which is equal to that in [8]. Mi consists of four parameters; in addition, it has a probability of failure and re-transmitted time (RTi). The parameter is used to improve the probability of success by re-transmission;
- Global success reliability (GS): This denotes the probability that all the messages (M) can be successfully transmitted at least once in the testing time (τ). If the reliability of message (M) which is computed in this module is bigger than or equal to the system reliability goal, the system is reliable in transmission and sends all messages to the scheduling output module. M consists of each message (Mi); therefore, GS is obtained by multiplying each GSmi, as in Equation (5):
- Single message reliability goal (SRmi): This parameter denotes the reliability goal of each message. SRmi must be bigger than or equal to the system reliability goal (SR). According to Equation (5), GS is obtained by multiplying each GSmi: in fact, GS does not meet SR when the reliability goal of each message (SRmi) is equal to SR. This is because each GSmi is less than 1 so that the multiplication result (GS) will fail to meet the system reliability goal.
2.5. Lookup Table Method
2.6. Scheduling Output Module
- Maximum retransmission times (RTi(max)): slot utilization is also an important factor for successful transmission. When slot utilization is bigger than 1, it will cause message transmission failure. This means that the number of slots used for message retransmission is over the total number of slots in the static segment (Nslot). Therefore, we can now denote RTi(max) as Equation (8):
- Minimum retransmission times (RTi(min)): the proposed method improved the reliability of the system using a message re-transmission mechanism. Essentially, there are too few re-transmission times to achieve the system reliability goal (SR). RTi(min) relates with SRmi and PFi, as in Equation (9):
2.7. Proposed Fast Reliability Scheduling Algorithm
| Algorithm 1 The proposed fast reliability scheduling algorithm |
| Inputs: M, System reliability goal (SR); Outputs: re-transmitted times (RTi) 1: for each Mi do 2: compute RTi(min) and GSmi end_for 3: if (Global Success Reliability ≧ System Reliability goal) then Schedulability Analysis /* GS does not meet SR, start to re-compute SRmi and RTi */ 4: else sort GSmi in descending order to obtain GS1 > GS2 >…> GSn (Equation (5)) end_if 5: for j = 1 to n − 1 do 6: until ( &&) then /* to exclude the messages that do not need to be re-transmitted */ 7: TempGS = SR end_for 8: for I = 1 to n do 9: if (GSmi ≧ TempGS) then RTi = RTi(min) 10: else re-compute RTi(min) and GSmi using New_SRmi =TempGS end_if 11: if (Global Success Reliability < System Reliability goal) 12: for i to n do 13: re-compute RTi(min) and GSmi with New_SRmi using lookup table method end_for end_if end_for 14: if (Global Success Reliability ≥ System Reliability goal) then Schedulability Analysis 15: else goto Line 4 end_if 16: return {RT1, RT2,…, RTn} |
3. Experimental Results
3.1. Experimental Environment and Validation
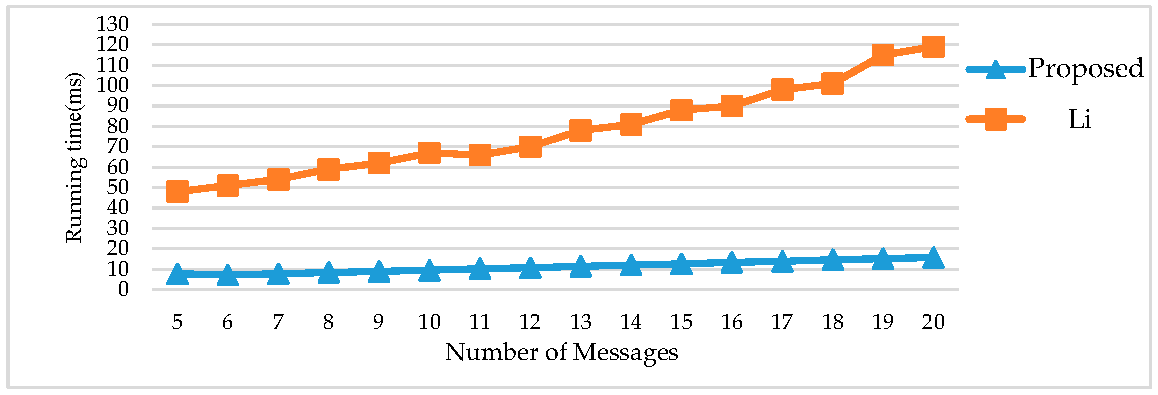
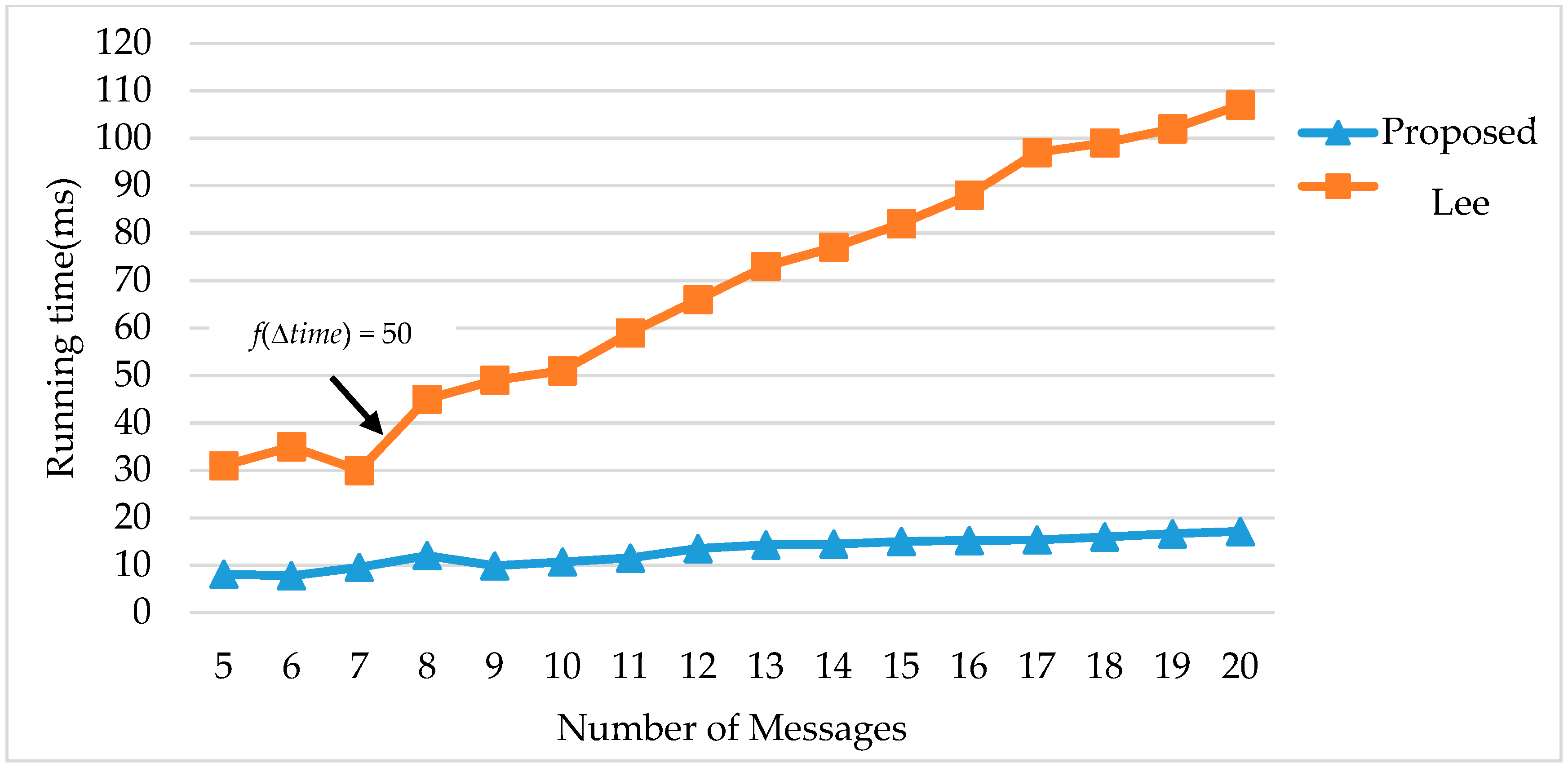
3.2. Performance Evaluation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- FlexRay Communications System—Protocol Specification—Version 2.1 Revision A. Available online: https://www.softwareresearch.net/fileadmin/src/docs/teaching/SS08/PS_VS/FlexRayCommunicationSystem.pdf (accessed on 24 April 2017).
- Tuohy, S.; Glavin, M.; Hughes, C.; Jones, E.; Trivedi, M.; Kilmartin, L. Intra-Vehicle Networks: A Review. IEEE Trans. Intell. Transp. Syst. 2014, 16, 534–545. [Google Scholar] [CrossRef]
- X-By-Wire Team. X-By-Wire: Safety Related Fault Tolerant Systems in Vehicles; Technical Report No. BE 95/1329; X-by-Wire Consortium: Stuttgart, Germany, 1998. [Google Scholar]
- Shreejith, S.; Fahmy, S.A.; Lukasiewycz, M. Reconfigurable Computing in Next-Generation Automotive Networks. IEEE Embedded Syst. Lett. 2013, 5, 12–15. [Google Scholar] [CrossRef]
- Shanker, S.; Fahmy, S.A. Extensible FlexRay Communication Controller for FPGA-Based Automotive Systems. IEEE Trans. Veh. Technol. 2014, 64, 453–465. [Google Scholar]
- Kanekawa, N.; Ibe, E.H.; Suga, T.; Uematsu, Y. Dependability in Electronic Systems: Mitigation of Hardware Failures, Soft Errors, and Electro-Magnetic Disturbances; Springer Science & Business Media: New York, NY, USA, 2010. [Google Scholar]
- Li, W.; Natale, M.D.; Zheng, W.; Giusto, P.; Alberto, S.V.; Seshia, S.A. Optimizations of an Application-Level Protocol for Enhanced Dependability in FlexRay. In Proceedings of the IEEE Design, Automation & Test in Europe, Nice, France, 20–24 April 2009; pp. 1076–1081. [Google Scholar]
- Tanasa, B.; Bordoloi, U.D.; Eles, P.; Peng, Z. Scheduling for fault-tolerant communication on the static segment of FlexRay. In Proceedings of the 31st IEEE Real-Time Systems Symposium, San Diego, CA, USA, 30 November–3 December 2010; pp. 385–394. [Google Scholar]
- Li, R.; Zhu, Y.; Wang, Z. Research on Fault Tolerance for the Static Segment of FlexRay Protocol. In Proceedings of the 15th IEEE Advanced Communications Technology, Pyeong Chang, Korea, 27–30 January 2013; pp. 362–366. [Google Scholar]
- Lee, T.Y.; Hong, Z.H.; Liou, M.J. Reliability Scheduling Approach for FlexRay Fault-tolerant Systems. In Proceedings of the Innovative Electronics Design and Applications, Taipei, Taiwan, 13 December 2013; pp. 314–317. [Google Scholar]
- Wang, Y.; Liu, H.; Huang, B.; Sun, X. Frame Design for Vehicular FlexRay Network Based on Transmission Reliability and Slot Utilization. In Proceedings of the 9th IEEE International Symposium on Computational Intelligence and Design, Hangzhou, China, 10–11 December 2016; pp. 447–452. [Google Scholar]
- Liu, B.; Bai, W.W.; Zhen, G.C. A Prompt Retransmission Method for In-Vehicle Network FlexRay. In Proceedings of the 36th IEEE Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 850–855. [Google Scholar]
- Lee, T.Y.; Wang, J.J.; Lin, I.A.; Tsai, J.T. Fast Reliability Scheduling Algorithm for the Static Segment of FlexRay for Vehicle Network. In Proceedings of the 7th IEEE International Symposium on Next Generation Electronics, Taipei, Taiwan, 7–9 May 2018. [Google Scholar]
- Luis, M.; Veronica, V.; Paulo, P.; Luis, A. Error Recovery in the Time-Triggered Paradigm with FTT-CAN. Sensors 2018, 18, 188. [Google Scholar]
- Ferreira, J.; Oliveira, A.; Fonseca, P.; Fonseca, J.A. An Experiment to Assess Bit Error Rate in CAN. In Proceedings of the 3rd International Workshop on Real-Time Networks, Catania, Italy, 29 June 2004; pp. 15–18. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recovery Mechanism | Mi (Ti, Di, Si, PFi) | RTi | GSmi | GS | Slot Utilization |
|---|---|---|---|---|---|
| Non | M1 (32, 32, 240, 2.39997 × 10−5) | 0 | 0.0672055 | 0.0000 | 0.031424 |
| M2 (18, 18, 272, 2.71996 × 10−5) | 0 | 0.00433948 | |||
| M3 (24, 24, 296, 2.95996 × 10−5) | 0 | 0.0117959 | |||
| M4 (3, 3, 264, 2.63997 × 10−5) | 0 | 1.74401 × 10−14 | |||
| M5 (6, 6, 152, 1.51999 × 10−5) | 0 | 0.000109455 | |||
| Proposed FRSA | M1 (32, 32, 240, 2.39997 × 10−5) | 1 | 0.999935 | 0.9987 | 0.0628472 |
| M3 (24, 24, 296, 2.95996 × 10−5) | 1 | 0.999869 | |||
| M5 (6, 6, 152, 1.51999 × 10−5) | 1 | 0.999861 | |||
| M2 (18, 18, 272, 2.71996 × 10−5) | 1 | 0.999852 | |||
| M4 (3, 3, 264, 2.63997 × 10−5) | 1 | 0.999164 |
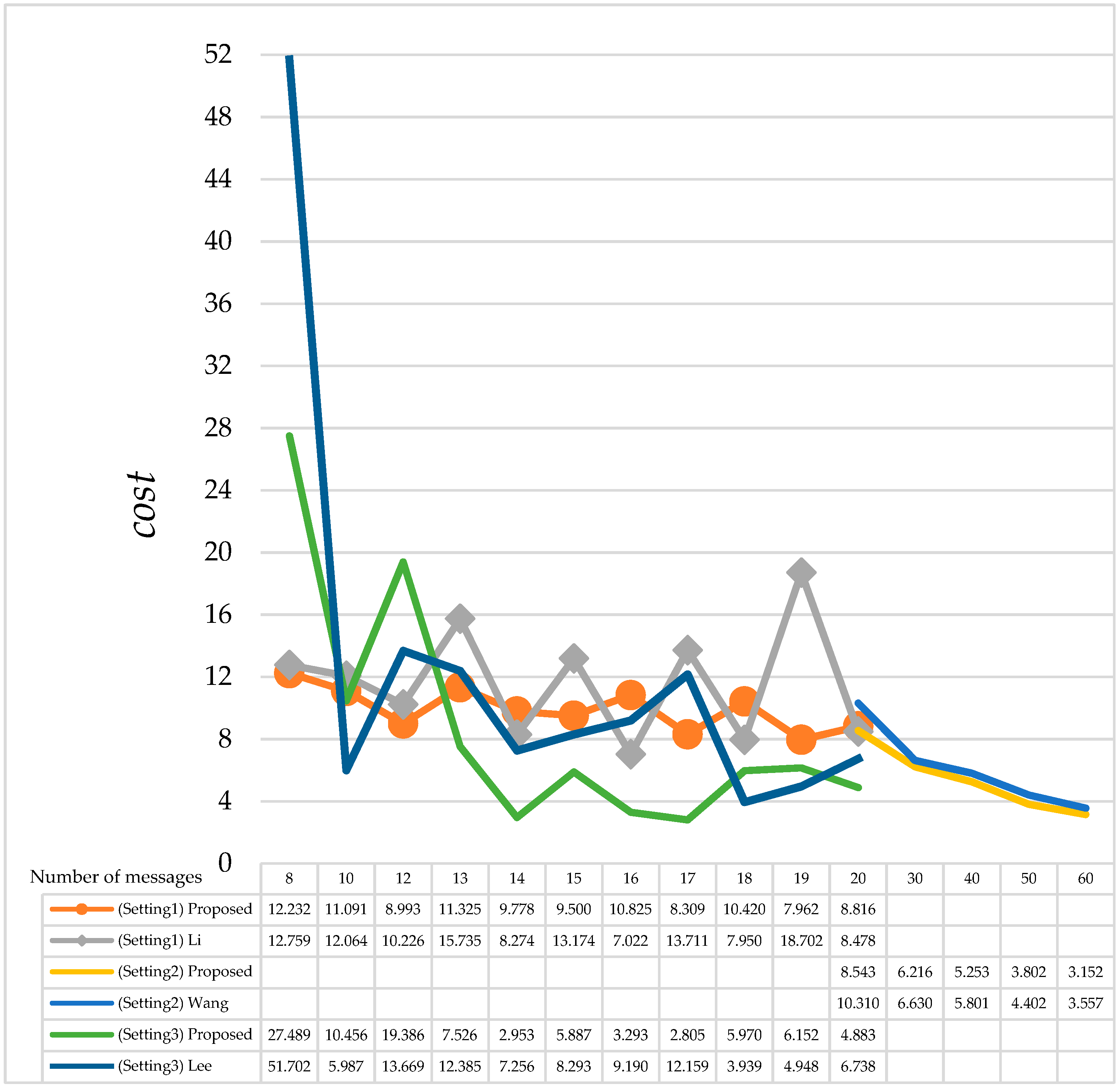
| Message Parameter Configuration in Static Segments | |||
|---|---|---|---|
| Parameter | Setting 1 | Setting 2 | Setting 3 |
| Period (Ti) | 5 ms~20 ms | 1 ms~25 ms | 2 ms~40 ms |
| Deadline (Di) | same as Ti | same as Ti | same as Ti |
| Size of message (Si) | 64 bits | 32 bits~72 bits | 32 bits |
| Bit Error Rate (BER) | - | 10−3 | - |
| Probability of failure (PFi) | 1%~50% | 1%~50% | |
| The Parameter Configuration of FlexRay Buses | |||
| FlexRay cycle (LFC) | 5 ms | 5 ms | 5 ms |
| Length of static segment (LST) | 3 ms | 3 ms | 3 ms |
| Length of slot in SS (Lslot) | 20 μs | 8.3 μs~50 μs | 8.57 μs |
| The number of slot in static segment (Nslot) | 150 | 60~360 | 350 |
| The Parameter Configuration of Systems | |||
| Range of messages | 5~20 | 1~60 | 5~20 |
| System reliability goal (SR) | 99% | 99% | 99% |
| Testing time () | 3,600,000 ms | 3,600,000 ms | 3,600,000 ms |
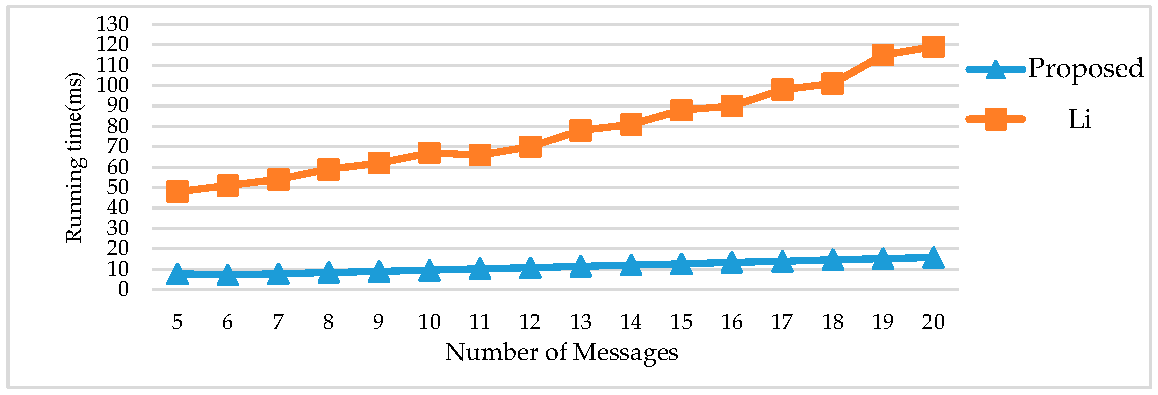
| Number of Messages | Proposed Method | Li’s Method [9] | ||
|---|---|---|---|---|
| Running Time | Slot Utilization | Running Time | Slot Utilization | |
| 5 | 7.79 | 16.54 | 48 | 12 |
| 6 | 7.17 | 26.84 | 51 | 20 |
| 7 | 7.79 | 30.84 | 54 | 26 |
| 8 | 8.39 | 36.24 | 59 | 28 |
| 9 | 8.93 | 40.25 | 62 | 36 |
| 10 | 9.51 | 45.97 | 67 | 40 |
| 11 | 10.26 | 49.75 | 66 | 46 |
| 12 | 10.72 | 54.12 | 70 | 50 |
| 13 | 11.44 | 59.92 | 78 | 56 |
| 14 | 12.03 | 64.7 | 81 | 62 |
| 15 | 12.61 | 70.19 | 88 | 68 |
| 16 | 13.39 | 74.24 | 90 | 76 |
| 17 | 13.89 | 77.78 | 98 | 82 |
| 18 | 14.69 | 83.90 | 101 | 88 |
| 19 | 15.17 | 89.21 | 115 | 92 |
| 20 | 15.79 | 94.59 | 119 | 100 |
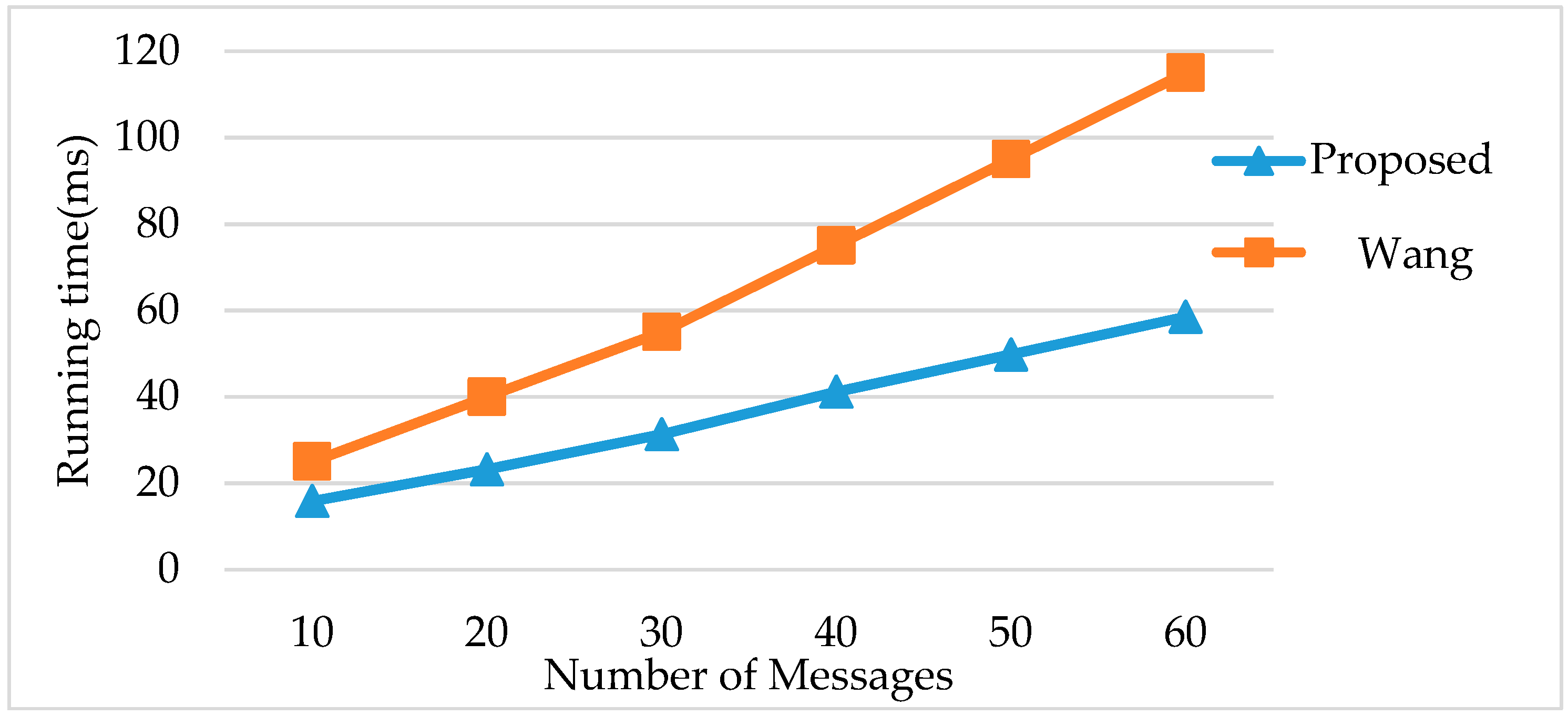
| Number of Messages | Proposed Method | Wang’s Method [11] | ||
|---|---|---|---|---|
| Running Time | Slot Utilization | Running Time | Slot Utilization | |
| 10 | 15.85 | 77.64 | 25 | 86 |
| 20 | 23.21 | 78.01 | 40 | 86.2 |
| 30 | 31.31 | 81.83 | 55 | 86.4 |
| 40 | 41.17 | 84.17 | 75 | 86.6 |
| 50 | 49.79 | 85.46 | 95 | 86.8 |
| 60 | 58.53 | 83.84 | 115 | 87.15 |
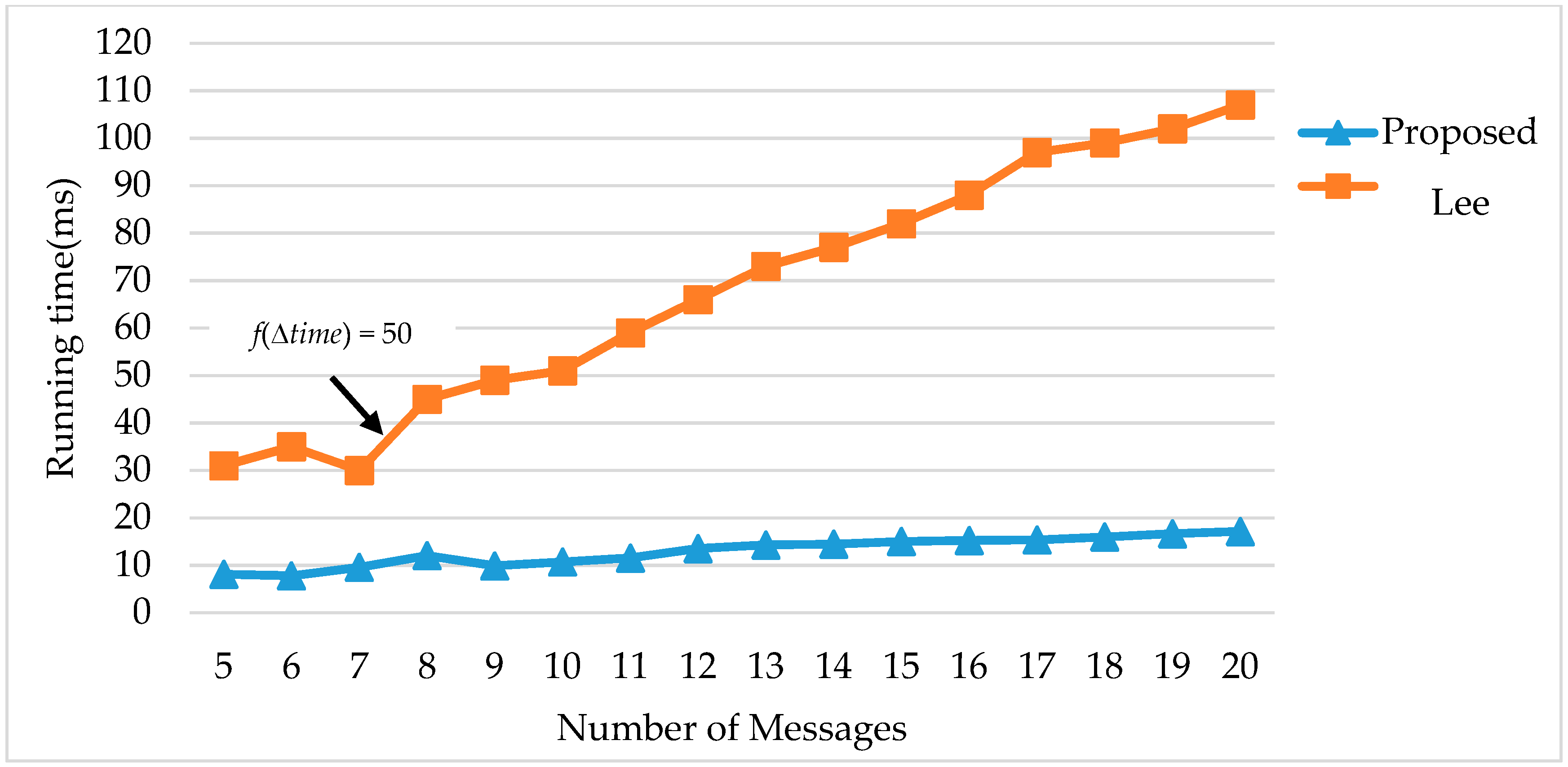
| Number of Messages | Proposed Method | Lee’s Method [10] | ||
|---|---|---|---|---|
| Running Time | Slot Utilization | Running Time | Slot Utilization | |
| 5 | 8.13 | 9.53 | 31 | 8.81 |
| 6 | 7.79 | 11.87 | 35 | 10.36 |
| 7 | 9.59 | 13.90 | 30 | 12.31 |
| 8 | 12.05 | 14.71 | 45 | 13.62 |
| 9 | 9.89 | 16.06 | 49 | 15.68 |
| 10 | 10.73 | 19.63 | 51 | 19.06 |
| 11 | 11.54 | 20.71 | 59 | 19.22 |
| 12 | 13.54 | 24.67 | 66 | 21.67 |
| 13 | 14.3 | 24.89 | 73 | 23.13 |
| 14 | 14.45 | 26.68 | 77 | 24.88 |
| 15 | 15.03 | 28.12 | 82 | 27.01 |
| 16 | 15.23 | 31.42 | 88 | 29.98 |
| 17 | 15.36 | 33.2 | 97 | 32.85 |
| 18 | 15.98 | 34.82 | 99 | 33.82 |
| 19 | 16.65 | 37.25 | 102 | 36.46 |
| 20 | 17.14 | 38.83 | 107 | 36.74 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, T.-Y.; Lin, I.-A.; Wang, J.-J.; Tsai, J.-T. A Reliability Scheduling Algorithm for the Static Segment of FlexRay on Vehicle Networks. Sensors 2018, 18, 3783. https://doi.org/10.3390/s18113783
Lee T-Y, Lin I-A, Wang J-J, Tsai J-T. A Reliability Scheduling Algorithm for the Static Segment of FlexRay on Vehicle Networks. Sensors. 2018; 18(11):3783. https://doi.org/10.3390/s18113783
Chicago/Turabian StyleLee, Trong-Yen, I-An Lin, Jun-Jie Wang, and Ju-Tse Tsai. 2018. "A Reliability Scheduling Algorithm for the Static Segment of FlexRay on Vehicle Networks" Sensors 18, no. 11: 3783. https://doi.org/10.3390/s18113783
APA StyleLee, T.-Y., Lin, I.-A., Wang, J.-J., & Tsai, J.-T. (2018). A Reliability Scheduling Algorithm for the Static Segment of FlexRay on Vehicle Networks. Sensors, 18(11), 3783. https://doi.org/10.3390/s18113783